1. Introduction
The starting time, usually assessed from the beep until the swimmer’s vertex passes the 15 m mark, is highly representative of overall performance for short-distance events [
1,
2,
3]. The start is composed of the block/wall, flight, entry, and underwater interdependent phases [
1,
2,
4], with the first actions being determinant of the global effectiveness [
2,
3,
5]. In the ventral events starts, it is advised to generate proper partition between horizontal and vertical forces to guarantee optimal take-off angles for a greater flight distance [
1,
5,
6]. Flight distance is also important in the dorsal events starts [
7,
8,
9], allowing the swimmers to travel considerably faster through the air than in water. The backstroke start flight distance is shorter compared to that observed on ventral events starts [
1,
4,
10], since the swimmers’ initial position is very close to the water surface [
7,
9,
11]. Moreover, its reduced take-off angle implies a smaller vertical reaction force, which highlights the importance of the horizontal component for propulsion [
10,
12] and overall performance.
Detailed assessments of the backstroke-start kinetics using tri-axial waterproof force plates are scarce [
13], which limits the proposal of effective steering strategies. Previous studies that focused on differences in the lower limbs’ force production between backstroke start technical variants (with and without the wedge) revealed a two-peak profile in the horizontal and vertical raw force components [
8,
10,
13], with no wedge effect on impulse being noticed [
8]. Thus, a thorough description of force generation considering postural and effective force components is needed for accurate training feedback (as previously evidenced with the “grab start” technique [
6]). The horizontal and vertical force components in the backstroke start might involve swimmers’ muscular and body weight dynamic effects to maintain contact with the wall while moving from the hands-off to the take-off. The use of the wedge might partially obviate the friction mechanism that occurs, especially on the vertical force component [
8,
10,
12], as to swimmers’ feet indentation and wall contact stability (
Figure 1).
According to established stepwise procedures [
5], the impulse is continuously generated in the absence of an effective start effort. This can be evidenced by an inactive rigid body fall while rotating around a wall-fixed axis. In the backstroke start, the unanimated body’s descent would begin at ~40° to the horizontal axis [
11] (similarly to the kick start [
1,
14,
15], and conversely to the ~90° observed in the grab start [
6]), which might imply a delayed loss of wall contact given the smaller take-off angle. For an inactive body, the ground reaction force
is simply a passive force applied to the swimmers’ inertial structure (
) (Equation (1)).
should be considered in the ongoing study as the force generated by an inert rigid body fall, for which the calculation of inertia matrix and differential equation solution for force–time curves might be determined [
6].
Therefore, it is recommended to split the swimmers
into passive (
) and active (
) backstroke-start force components (Equation (2)) for swimmers’ effective technical instruction [
11,
16].
Here is the same as in Equation (1), and is in the opposite direction of the propulsive force vector applied to the start wall by swimmers’ muscular and mechanical actions.
The current study aimed to apply the
splitting formalism [
6] to the backstroke start technique after the hands-off instant, since, from this point onwards, a swimmers’ body rotates around a single axis according to the simple rigid body model [
6]. When performing the backstroke start, swimmers have the option of using the wedge and the wall (FINA rule SW 6.1; FINA [
17]) by means of a halluces–platform alignment, the central point of which should be the centre of pressure (COP). This geometrical profile may be described as the centre of mass (CM) rotation around the halluces lateral–medial axis, merged into the CM displacement along the anterior–posterior CM–COP direction [
6].
will be split into the
and
components using the algorithm previously proposed [
6] to better understand the mechanical load applied by swimmers’ musculoskeletal systems and to define suitable steering strategies during the off-of-the-wall propulsion.
3. Results
Complete inertia matrix components were calculated (
Table 1) and the moment of inertia around the halluces’
minimum and maximum values were obtained in the most-tucked and most-extended body geometries, respectively. In both body geometries,
justifies the negative meaningfulness of the difference in
and
values between rigid articulated body positions. The value for the inertia term
almost tripled from the most-tucked to the most-extended inter-segmental backstroke-start positions. The CM–COP line’s angle to the horizontal axis computed during the unanimated rigid body fall showed an ~20° take-off angle (
Figure 7A), which is compatible with the trend found in the swimmers’ values. Angular velocity during the unanimated rigid body fall displayed a linear descendent profile from hands-off until take-off, contrary to the observed swimmers’ angular velocity–time curves, which highlighted a steep negative increment in values between ~−0.15 and −0.05 s (
Figure 7B). Swimmers’ angle and angular velocity (
Figure 7) showed an abrupt positive increase immediately before take-off, explained by near-zero force values, due to platform strain recovery inertial effects, causing numerical instability.
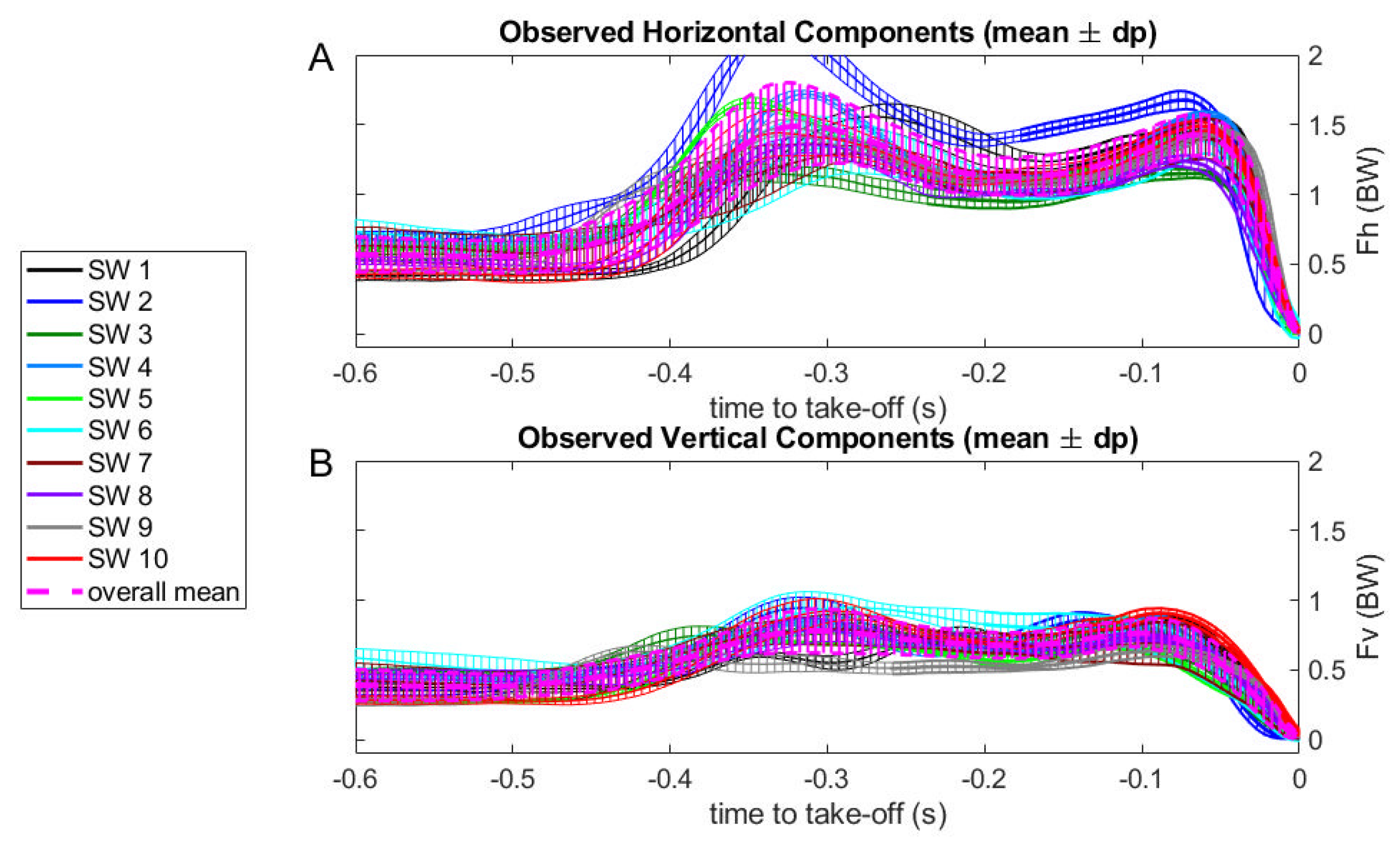
Following the starting signal, the backstroke swimmers’ initial movements occur between 0.5 and 0.4 s before the take-off instant (
Figure 8A,B), and the hands-off instant varies among swimmers, occurring between 0.25 and 0.15 s before the take-off (for each swimmer curve, the line thickness is increased at hands-off,
Figure 8A,B). Most of the swimmers showed consistent force–time curves, evidencing high stability, with standard deviations between 0.02 and 0.06 BW, with exception of swimmers six and seven (with 0.1 BW;
Figure 8A,B). Considering the swimmers 40 force–time curves all together, they showed a standard deviation of 0.14 BW and 0.1 BW for horizontal (
Figure 8A) and vertical (
Figure 8B) components, respectively.
In conclusion, each one of the swimmers in the sample has a consistent way of force production at the swimming start, although different swimmers use different strategies. Since our model only applies after hands-off, in the remaining figures we will only show the force curves after this event and until take-off.
Rigid body fall
and
curves showed stability from the hands-off until 0.12 s before the take-off, followed by a progressive descending profile (
Figure 9). In opposition to this, most of swimmers seem to evidence within the trials a slightly increasing
and
profile from hands-off until reaching a peak value just before take-off.
had the most outstanding magnitude, with peak values occurring later than those of
(~0.04 vs 0.08 s before take-off, respectively;
Figure 9).
Figure 10 shows the same
and
curves as
Figure 9, displaying a stable curve between 0.25–0.12 s before take-off, which was followed by a descending profile, concomitant with progressive increases in
and
. Since the splitting of the observed force curves into passive and active components is obtained through a
θ(
t)-mapping and not a
t-mapping, some artifacts may appear in the curves (
Figure 10).
4. Discussion
Swimming-start
and
evaluations have here highlighted swimmers’ strategies for achieving a proper take-off angle to attain a longer flight distance. Since this is an important starting skill [
1,
3,
6], accurate tools were designed to assess and interpret the generation of the swimming-starts’ external force for research purposes and training feedback [
1,
12,
20]. The current study used a previously developed algorithm [
6] to interpret the mechanisms that are responsible for the backstroke start
and
generation (as based in fundamental mechanics). From hands-off until ~0.12 s before take-off,
and
depicted a stable profile, followed by a gradual reduction concurrent with rises in
and
[
12], showing that even in the absence of any active propulsion effort, real propulsion can be observed [
6]. Therefore, it was noticed that two start trials from the same swimmer would produce identical
signature patterns, with eventual dissimilarities occurring due to different active and passive force contributions. Consequently, the analysis of these curves would enable more objective and accurate feedback [
5,
16,
21], a need that would become even greater when realizing that the differences between elite athletes have decreased considerably over the years [
16,
22].
Swimmers’ inertia changed due to the different (most-tucked or most-extended) backstroke-start inter-segmental positions that were used in the computer simulations. This allowed for the calculation of
as a crucial parameter in the CM–COP direction and the separation of
and
components. Contrarily to the ventral start technique [
6], the
value almost tripled in the most-tucked vs the most-extended body positions, in line with the complexity of the backstroke-start performance [
7,
9,
23]. In the backstroke start, swimmers had quickly to change from a tucked positioning (mostly sustained by the upper limbs even when using the wedge) to an effective segmental organization to generate proper lower-limb propulsion [
7,
9,
11]. Small
values enabled higher angular accelerations around the halluces and evidenced that the beginning of the movement was clearly a rotation [
7,
9,
11], while the last contact moments showed more propulsion out of the wall effort. Contrarily to the previous studies, the present findings showed a detailed technical analysis based on the horizontal and vertical force–time curve profiles generated by muscular-based biomechanical actions and body weight dynamical effects during a commonly used backstroke start variant. The absolute force and impulse assessments are valuable performance indicators [
8,
10]; however, the understanding of the steering strategy adopted considering the relative position and orientation of body segments as they changed during the backstroke start might help coaches and swimmers to perform the task in a more effective way.
Swimmers who performed the symmetric
and
ventral grab start propelled themselves out of the block at a ~45° take-off angle [
6] and
and
at the kick start had a similar magnitude profile after the rear-foot take-off [
1,
14,
24]. However, these variables have not shown a similar pattern in the backstroke start, even with the wedge [
8,
12], probably due to a smaller
angle constraint. The take-off angle is a backstroke-start performance determinant [
7,
9,
10], and is critical for the flight phase extent and duration [
9,
11]. The backstroke starts with vs. without wedge showed a greater take-off angle [
11] because of friction mechanism obviation [
8,
12]. Elite swimmers used a larger hip joint angular velocity to achieve proper steering postures on the take-off and entry angles [
7,
14], and the
contribution after hands-off, followed by the
generation, highlighted that major postural adjustments for proper take-off angle should be performed until the reduction of meaningful inertial effects in order to optimise backstroke-start performance determinants before and after the hands-off instant [
7,
12].
The current study’s
angle had a sharp value reduction ~0.1 s before the take-off, in agreement with progressive increases in
and
. Following the hands-off, swimmers continued rotating the trunk and upper limbs, which contributed to the appearance of a maximum
before the
peak [
13].
peak values had already been noticed when using the wedge [
10] and were not so pronounced as
due to essential backward steering before the take-off [
8,
11]. Notwithstanding this,
was indicated as a crucial factor for successful ventral swimming-starts performance [
1,
5,
15], and a larger
peak just before take-off is a cardinal result for backstroke-start propulsion [
12,
13,
24]. Even though the main contribution of
during the backstroke start with the wedge is expected to be denoted before the hands-off, no kinetic effect was observed in backstroke start kinetics with the wedge [
8]. The present study reinforces the fact of backstroke-start performance complexity to generate the vertical component for propulsion (cf. previous findings [
8]), but also evidences from the active and passive force–time curve analysis the optimal time for segmental rotations and effective propelling force. Moreover, contrarily to the passive force, the active component is apparently more susceptible to high variability (cf. [
6]), which suggests that the selection of the proper backstroke-start technical variation should be mainly based on optimised propulsive muscular actions preceding the take-off.
The
-mapping methodology developed and implemented before on the
grab-start technique to split
and
components [
6] was used in the current study to characterise the backstroke start. It exhibited an evident
and
contribution from ~0.2–0.12 s before the take-off (progressively decreasing), in opposition to the grab-start profile [
6]. The grab-start conditions are different, considering the
angle, with swimmers undergoing
effects during a longer period and, consequently, revealing a greater
contribution. In the grab-start technique, swimmers evidenced
and
just after the hands-off, which means that over 60% of the block time has been influenced by inertial components. Fine control and timing of force production is necessary to find the optimal flight phase trajectory and at the same time prepare for a smooth water entry with the least possible resistance [
22]. The main task for the swimmer has environmental and organic constraints that are faced during the most propulsive starting wall instants, and subtle differences may distinguish swimmers and individual swimmers’ trials as a consequence of environmental changes, training procedures, or learning phenomena [
6,
7,
8]. In fact, between-participant kinetic variability was previously noticed when the backstroke start was performed with the wedge, which was explained by differences in the swimmers’ technique or strength [
8]. In opposition to
,
is dependent on swimmer’s structure and inertial components, diminishing the degrees of freedom involved in the swimming start movement and the consequent variability.
Taking into consideration the backstroke start, the
influence revealed a more discreet profile for
and
components, which were substantially replaced by
and
~0.12 s before take-off. The upper and lower limbs’ high propulsive contribution during starts has been evidenced since the 1980s [
10,
12], leading researchers to propose diverse resistance-training programs to improve strength and power [
3,
5]. However, studies regarding the effects of force generated by swimmers on their starting performances are very scarce. The display of the configuration of swimmers’ body segments when generating
and
force profiles, as well as
data, might benefit coaches and sports scientists when designing backstroke-start strength tests, implementing strength training, and selecting the most proper backstroke-start variant for better performance [
3,
5] (with a combined kinetics and kinematics analysis; e.g., [
4,
12,
13]).
Notwithstanding the current study’s originality and relevance, limitations and further research directions should be addressed. The previously developed algorithm that allows the separation of
from
components in the grab start can be applied in the backstroke start from hands-off onwards. However, improvement of the algorithm’s capability to assess
components in view of the COP translation from the starting beep to the hands-off should be taken into consideration in future work, since the defined start variant might exhibit swimmers’ setup adaptations, which might affect kinematic and kinetics data (e.g., [
8,
10]). A swimmer’s mass is directly connected to anthropometric characteristics like volume, volumetric mass, CM position, height, and arm span, with the current model revealing small sensitivity to it [
6]. However, the impact of different swimmers’ levels of mass,
, and CM–COP values should be analysed, since more-proficient swimmers might produce better segment positioning and muscular effective actions [
3,
7,
10].


 ,
, 













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}