
Effect of Additional Mass on Natural Frequencies of Weight-Sensing Structures

 ,
,  ,
, 
Abstract
:1. Introduction
2. Principle and Theoretical Model
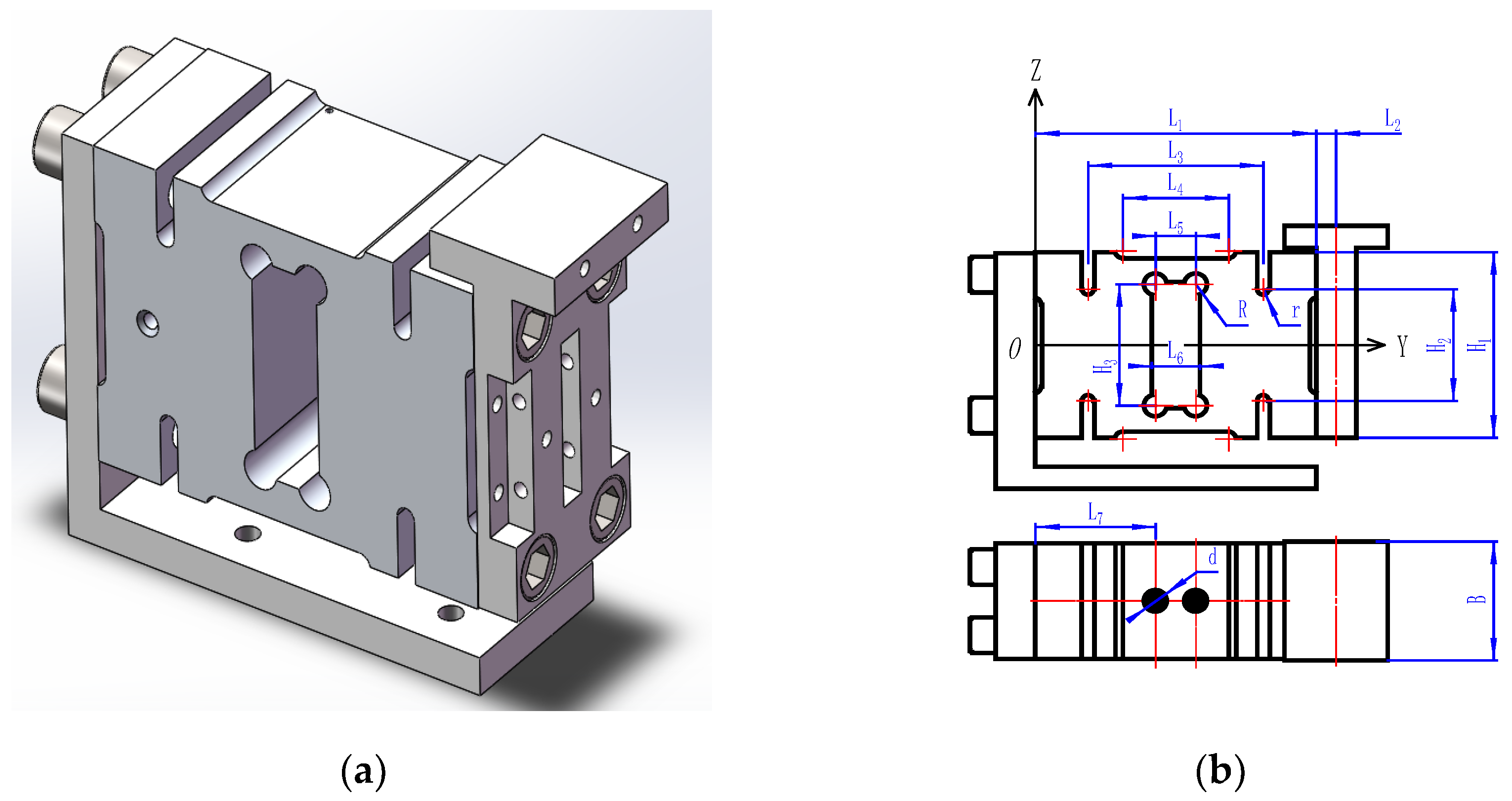
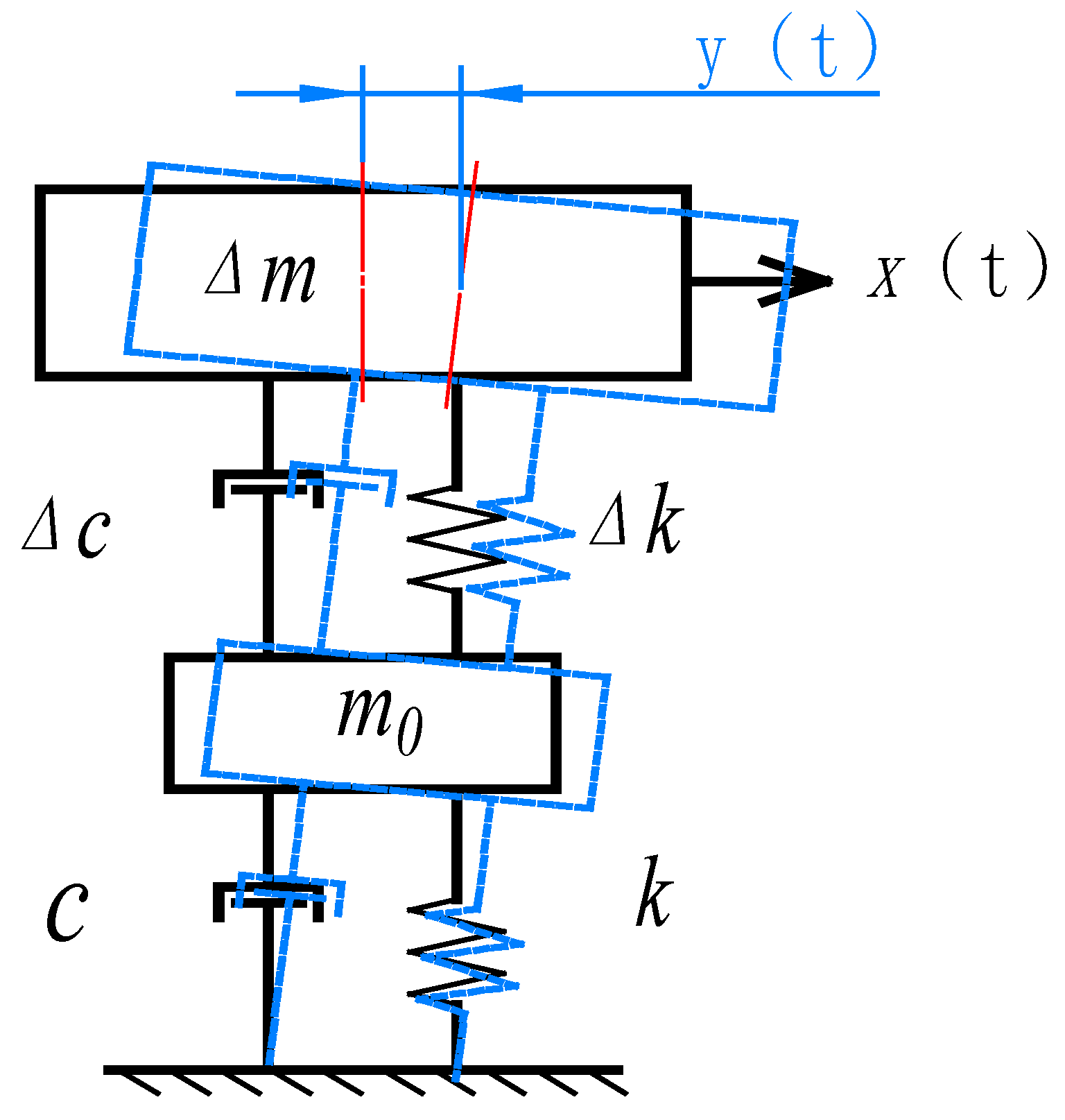
2.1. Theoretical Model
2.2. Preliminary Simulation Analysis
3. Detailed Simulation Analysis and Experimental Validation
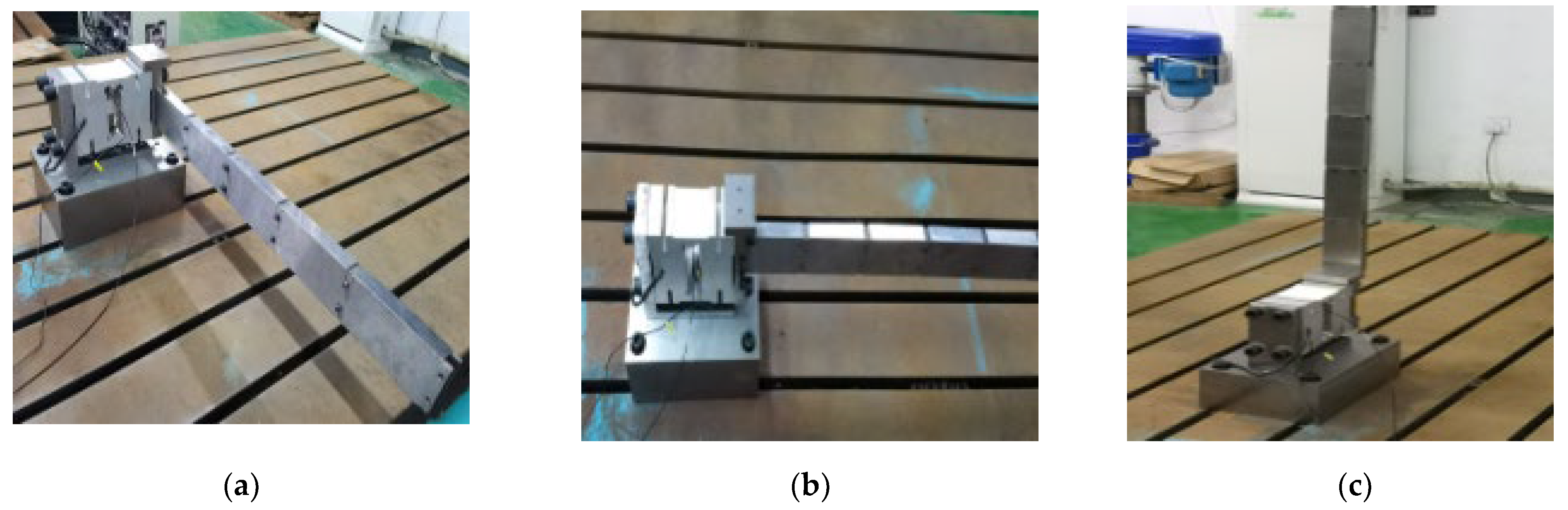
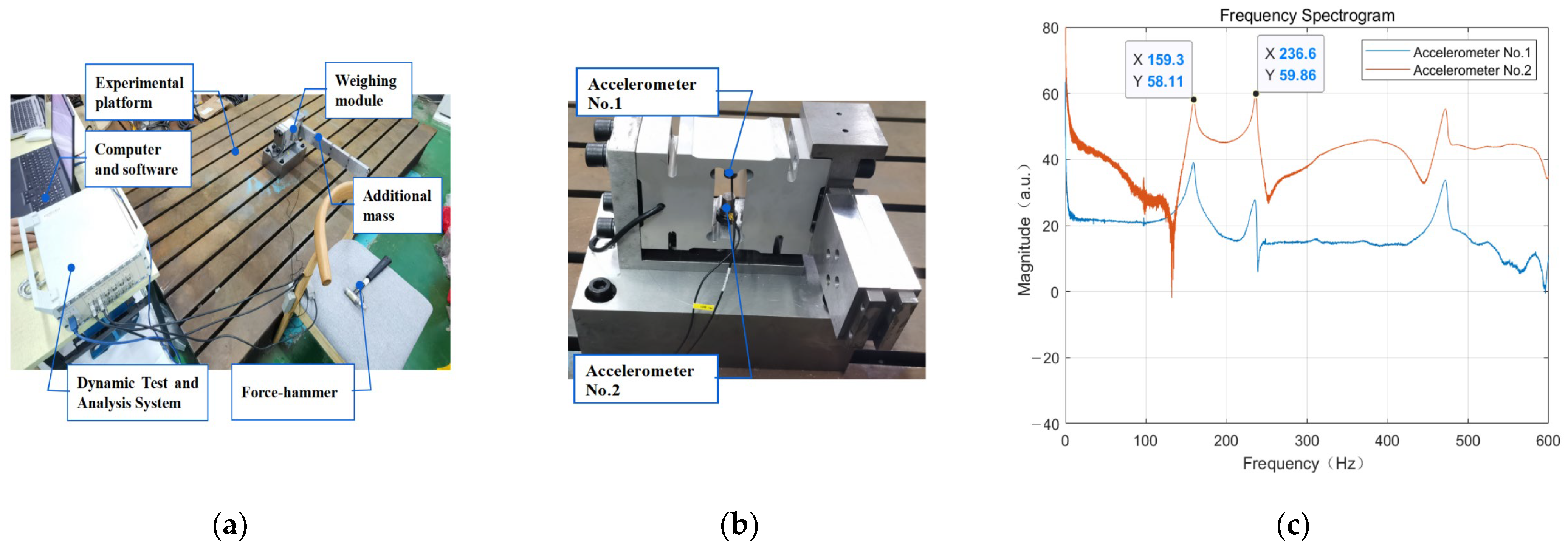
3.1. Experimental Design
3.2. Experimental Results
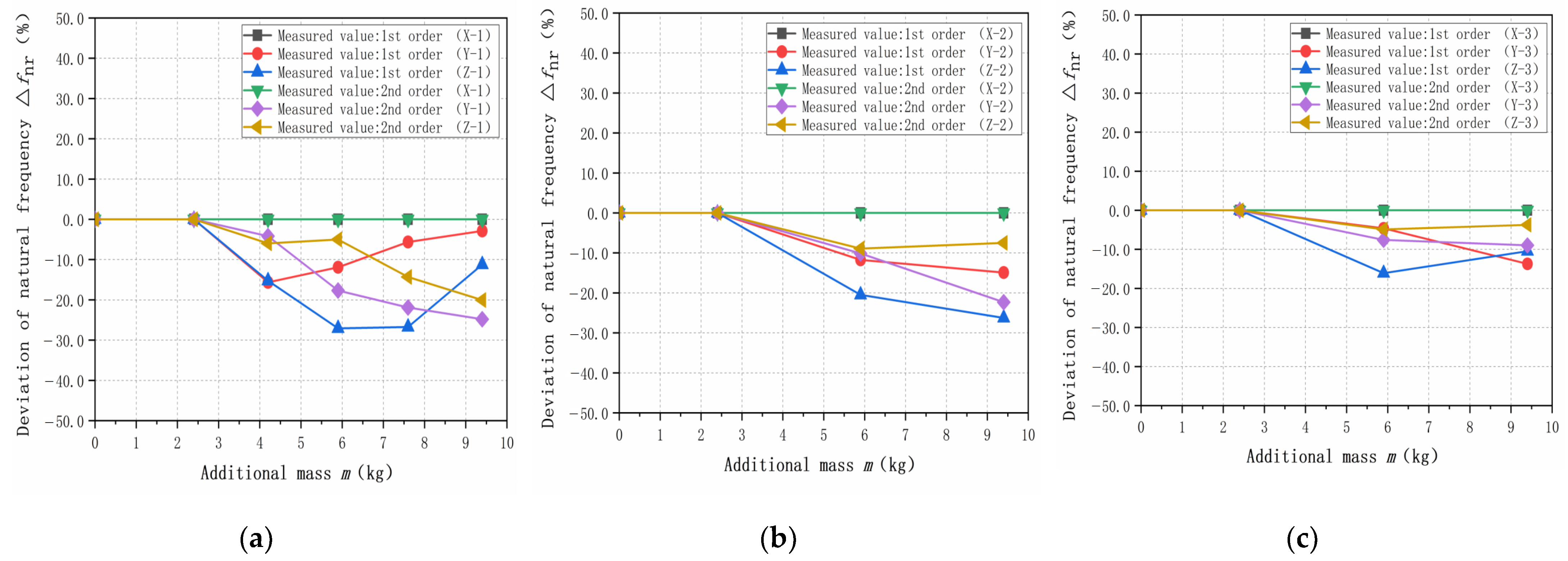
3.2.1. Effect of Mass Distribution on the Natural Frequencies
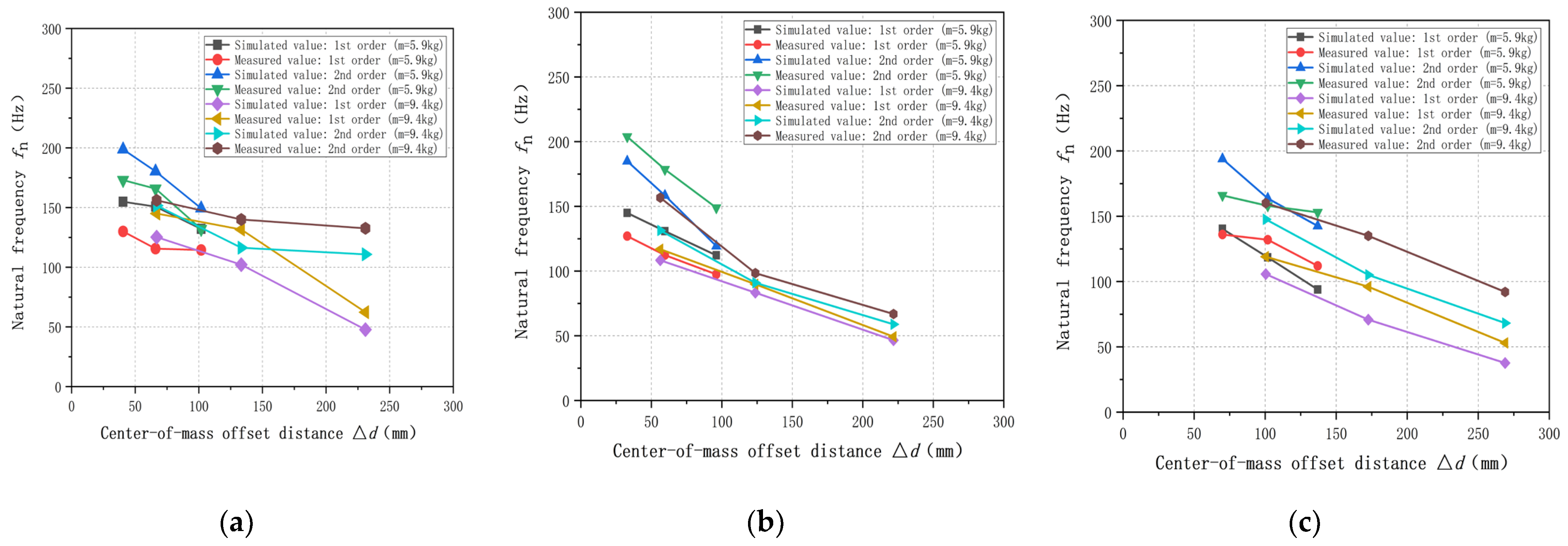
3.2.2. Effect of Center-of-Mass Distribution on the Natural Frequencies
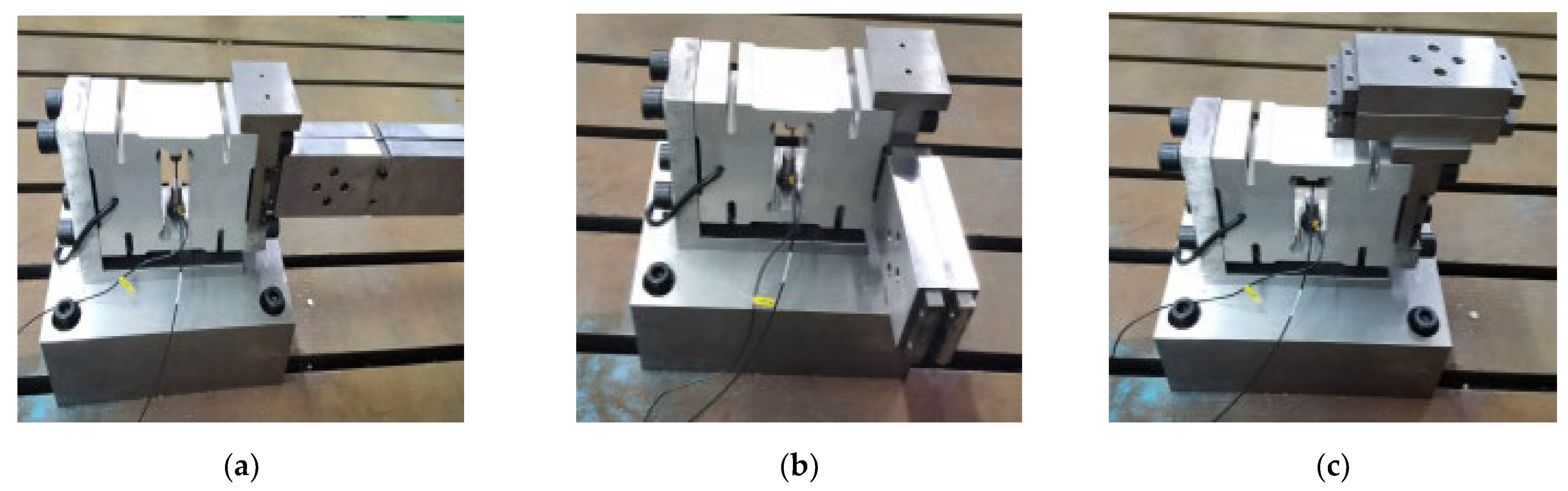
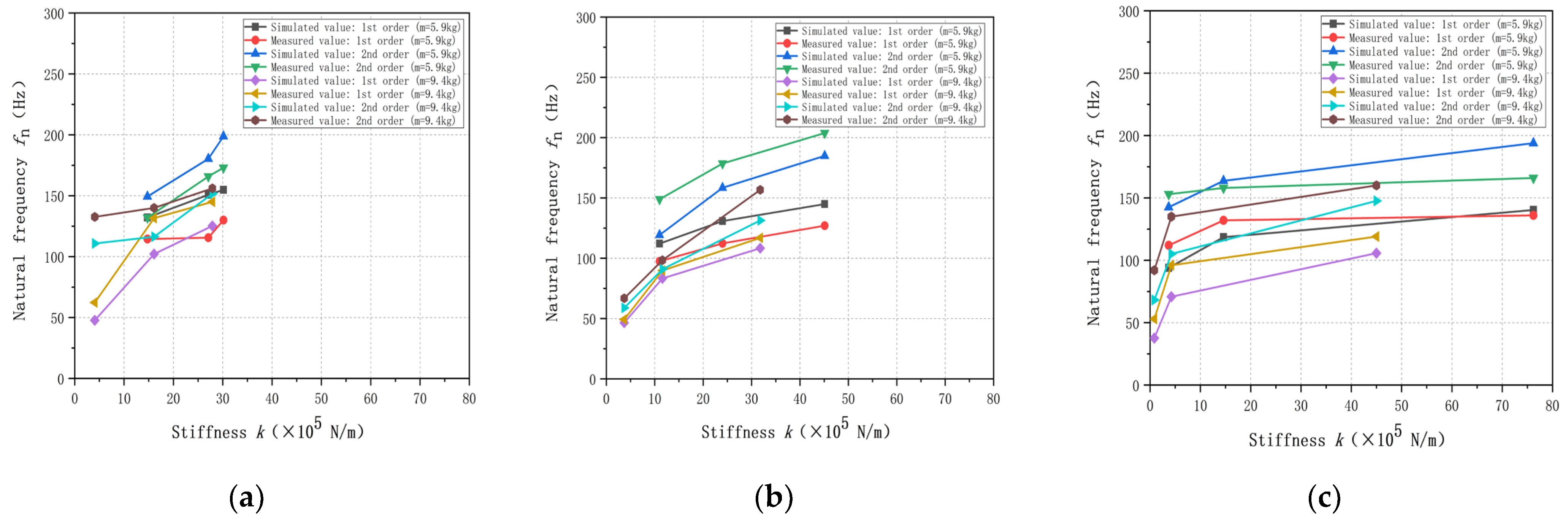
3.2.3. Effect of Stiffness Distribution on the Natural Frequencies
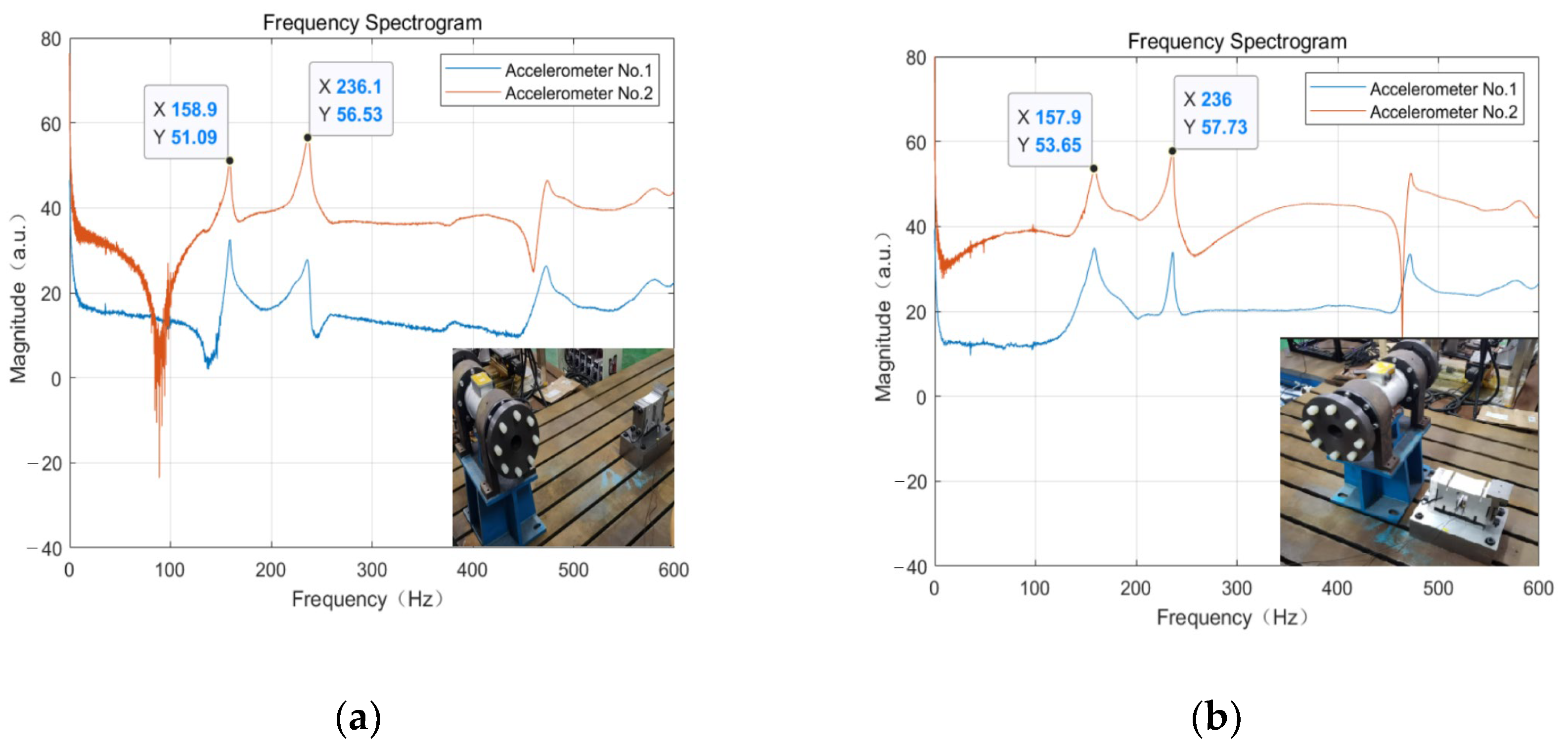
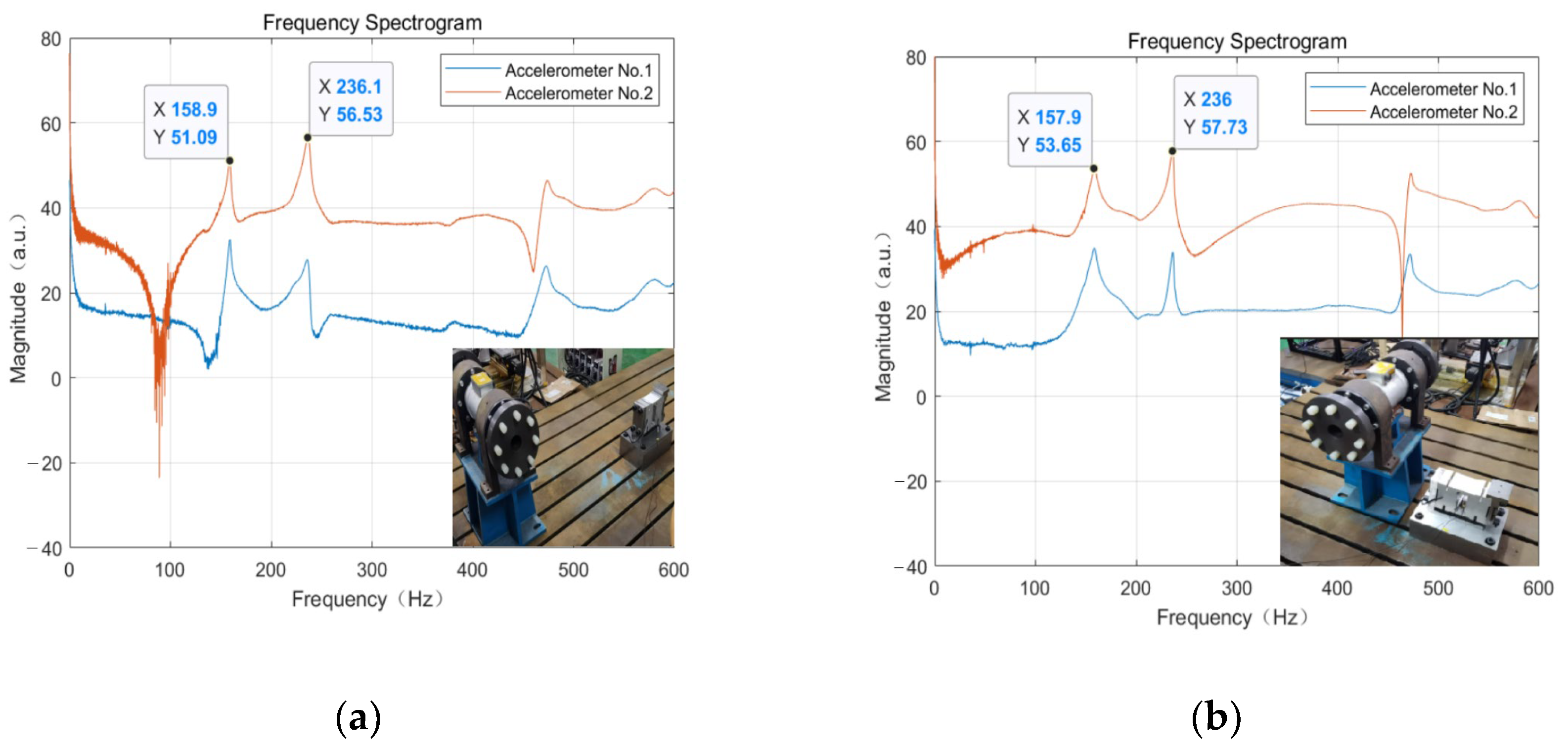
3.2.4. Effect of Other Components Placed on the Experimental Platform on the Natural Frequencies
3.2.5. Effect of Loose Fastening Screws on the Natural Frequencies of Weight-Sensing Structure
4. Conclusions
- (1)
- Weight sensing structures with the growth of additional mass in the X-, Y-, and Z-directions: The natural frequencies first showed a sharp decline and then tended to level off. They can be as low as 50 Hz below the low-frequency phenomenon, the three directions of the downward trends are the same, and the size of the natural frequencies in the Y- and Z-directions are smaller than the X-direction; it is necessary to consider the three-dimensional direction of the arrangement of the problem.
- (2)
- The natural frequencies of the weight-sensing structure have a linear, monotonically decreasing relationship with the center-of-mass offset distance, and the natural frequencies are higher when the center-of-mass is closer to the initial center position, while the decreasing slopes in the X-, Y-, and Z-directions do not show a significant difference.
- (3)
- When the additional mass is constant, the natural frequencies of the weight-sensing structure have a linear, monotonically increasing relationship with the stiffness. The slope is largest in the X-direction, second largest in the Y-direction, and the flattest in the Z-direction.
- (4)
- The influence of other components on the platform on the natural frequency is minimal. The parasitic effects introduced by other components can be effectively suppressed when the platform or the weight-sensing structure is mounted securely enough.
- (5)
- As the service life of the weight-sensing structure grows or by external forces, some fastening screw connections could loosen, and the variability of the first- and second-order natural frequencies is as high as 79.8% and 43.3%, which may result in a misjudgment of the frequency band range.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Liu, J.; Meng, X.; Zhang, D.; Jiang, C.; Han, X. An efficient method to reduce ill-posedness for structural dynamic load identification. Mech. Syst. Signal Process. 2017, 95, 273–285. [Google Scholar] [CrossRef]
- Presas, A.; Valentin, D.; Valero, C.; Egusquiza, M.; Egusquiza, E. Experimental Measurements of the Natural Frequencies and Mode Shapes of Rotating Disk-Blades-Disk Assemblies from the Stationary Frame. Sensors 2019, 9, 3864. [Google Scholar] [CrossRef]
- Yang, Q.; Wang, C.; Li, N.; Wang, W.; Liu, Y. Enhanced Singular Value Truncation Method for Non-Destructive Evaluation of Structural Damage Using Natural Frequencies. Sensors 2019, 12, 1021. [Google Scholar] [CrossRef] [PubMed]
- Gantasala, S.; Luneno, J.-C.; Aidanpää, J.-O. Investigating How an Artificial Neural Network Model Can Be Used to Detect Added Mass on a Non-Rotating Beam Using Its Natural Frequencies: A Possible Application for Wind Turbine Blade Ice Detection. Sensors 2017, 10, 184. [Google Scholar] [CrossRef]
- Wan, J.-H.; Bai, R.; Li, X.-Y.; Liu, S.-W. Natural Frequency Analysis of Monopile Supported Offshore Wind Turbines Using Unified Beam-Column Element Model. Sensors 2023, 11, 628. [Google Scholar] [CrossRef]
- Zhang, J.; Tian, Y.; Ren, Z.; Shao, J.; Jia, Z. A novel dynamic method to improve first-order natural frequency for test device. Meas. Sci. Rev. 2018, 18, 183–192. [Google Scholar] [CrossRef]
- Guo, J.; Chen, C.; Yang, X. Theoretical and applied research on natural frequency of cracked cantilever beam with an auxiliary mass. J. Solid Mech. 2016, 37, 264–272. [Google Scholar]
- Radoičić, G.; Jovanović, M.; Arsić, M. Experience with an on-board weighing system solution for heavy vehicles. Etri J. 2016, 38, 787–797. [Google Scholar]
- Boschetti, G.; Caracciolo, R.; Richiedei, D.; Trevisani, A. Model-based dynamic compensation of load cell response in weighing machines affected by environmental vibrations. Mech. Syst. Signal Process. 2013, 34, 116–130. [Google Scholar] [CrossRef]
- Kremer, E.; Zakrzhevsky, M.; Klokov, A. Complete bifurcation analysis of pendulum vibration absorber and rare attractors. In Proceedings of the 2012 IEEE 4th International Conference on Nonlinear Science and Complexity (NSC), Budapest, Hungary, 6–11 August 2012. [Google Scholar]
- Vanwalleghem, J.; De Baere, I.; Loccufier, M.; Van Paepegem, W. Dynamic calibration of a strain gauge based handlebar force sensor for cycling purposes. Procedia Eng. 2015, 112, 219–224. [Google Scholar] [CrossRef]
- Korkmaz, E.; Bediz, B.; Gozen, B.A.; Ozdoganlar, O.B. Dynamic characterization of multi-axis dynamometers. Precis. Eng. 2014, 38, 148–161. [Google Scholar] [CrossRef]
- Gu, B.; Chen, H.; Shen, F.; Xu, F. Dynamic calibration of force transducer and its accuracy analysis. Vib. Shock. 2005, 2, 95–98. [Google Scholar]
- Xu, P.; Qu, Q.; Yao, S.; Zhang, D.; Li, B.; Liu, Z. The method research to reverse the big tonnage impact load based on acceleration response. J. Railw. Sci. Eng. 2018, 15, 2621–2630. [Google Scholar]
- Zha, F. Research on the Effect of End Load on the Dynamic Characteristics of Strain Force Transducer. Ph.D. Thesis, Hefei University of Technology, Hefei, China, 2019. [Google Scholar]
- Yang, R. Research on Key Problems in Dynamic Calibration of Strain Multidimensional Force Sensor and Improvement of Dynamic Calibration Method. Ph.D. Thesis, Hefei University of Technology, Hefei, China, 2019. [Google Scholar]
- Yang, Y.; She, D.; Wei, Z. Study on the influencing factor of resonance frequency for micro-cantilever with double beams. J. Bohai Univ. (Nat. Sci. Ed.) 2015, 36, 183–187. [Google Scholar]
- Zhang, C. Influence of additional mass on dynamic performance of force sensor. Instrum. Tech. Sens. 2021, 7, 5–9. [Google Scholar]
- Chen, D.; Li, S. Troubleshooting analysis of the local resonance problem based on hammering method. Foreign Electron. Meas. Technol. 2018, 37, 5. [Google Scholar]
- Li, Y.J.; Wang, G.-C.; Zhang, J.; Jia, Z.Y. Dynamic characteristics of piezoelectric sixdimensional heavy force/moment sensor for large-load robotic manipulator. Measurement 2012, 45, 1114–1125. [Google Scholar] [CrossRef]
- Xie, M.; Wei, K.; Ren, J.; Wang, P. Theoretical and experimental studies on the natural frequencies of fastener clips. Nonlinear Dyn. 2023, 111, 5125–5140. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
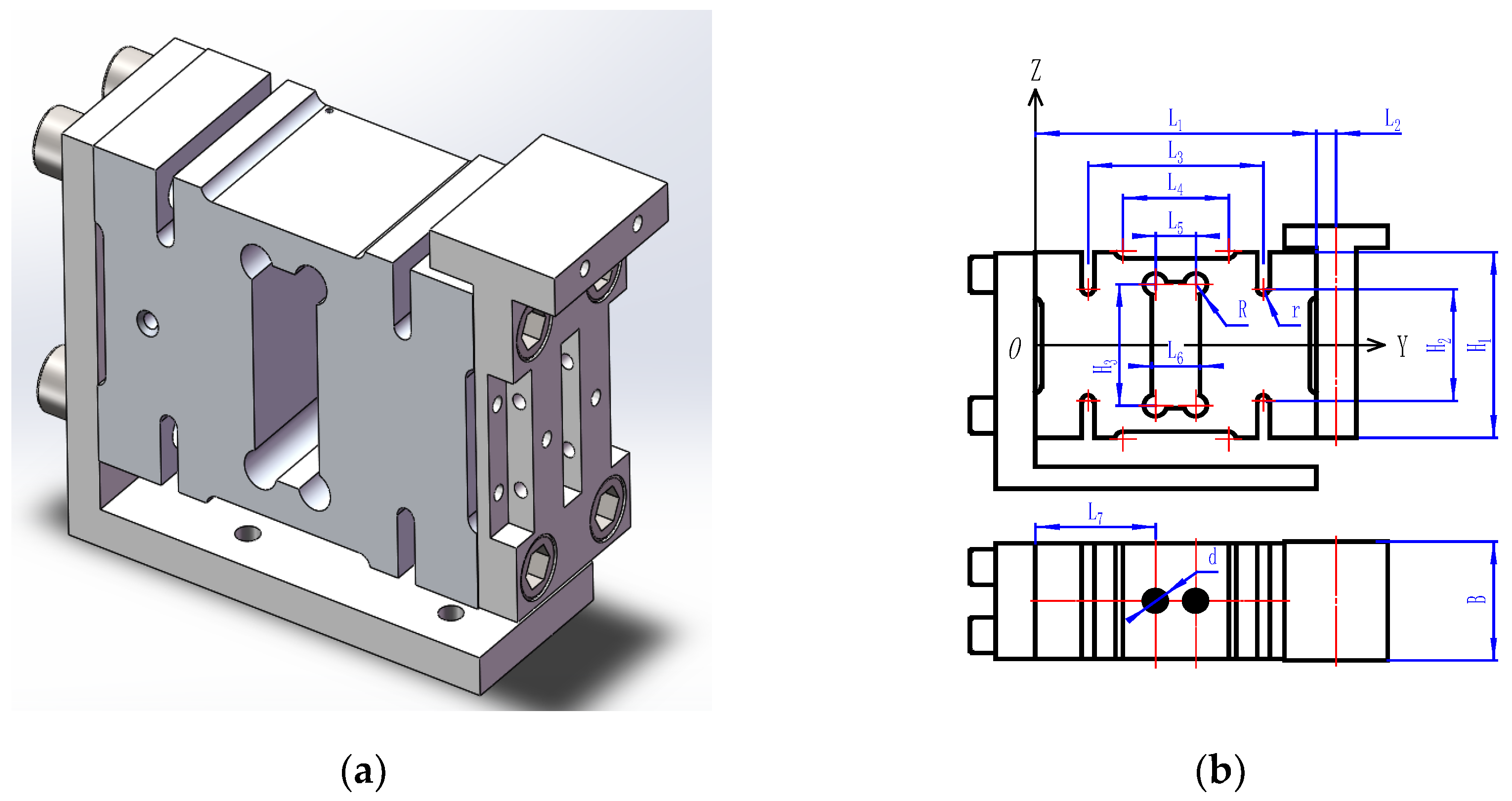
| Parameters | Symbol | Numerical Value (mm) |
|---|---|---|
| Total length of elastomer | 176 | |
| Distance between the center-line of the T-shaped pad at the free end and the end face of the elastomer | 9 | |
| Length of the center of the rounded corner at the bottom of the narrow groove | 110 | |
| Length of strain gauge patch area | 66.2 | |
| Center length of hollow groove fillet | 25 | |
| Hollow slot width of strain gauge patch area | 30 | |
| Total height of elastomer | 125 | |
| Center width of the rounded corner at the bottom of the narrow slot | 75 | |
| Center width of hollow groove fillet | 81.7 | |
| Total width of elastomer | 80 | |
| Radius of hollow groove in patch area | 7.5 | |
| Bottom fillet radius of narrow groove | 4 |
| Additional Mass (kg) | Distribution Forms | 1st-Order Natural Frequency | 2nd-Order Natural Frequency | ||||
|---|---|---|---|---|---|---|---|
| Simulated Value (Hz) | Measured Value (Hz) | Deviation (%) | Simulated Value (Hz) | Measured Value (Hz) | Deviation (%) | ||
| 0 | X-1 | 344.4 | 257.0 | −25.4 | 533.4 | 412.0 | −22.8 |
| X-2 | 344.4 | 257.0 | −25.4 | 533.4 | 412.0 | −22.8 | |
| X-3 | 344.4 | 257.0 | −25.4 | 533.4 | 412.0 | −22.8 | |
| 2.4 | X-1 | 215.1 | 159.3 | −25.9 | 297.5 | 236.5 | −20.5 |
| X-2 | 215.1 | 159.3 | −25.9 | 297.5 | 236.5 | −20.5 | |
| X-3 | 215.1 | 159.3 | −25.9 | 297.5 | 236.5 | −20.5 | |
| 4.2 | X-1 | 176.1 | 177.0 | +0.5 | 220.2 | 234.0 | +6.3 |
| X-2 | / | / | / | / | / | / | |
| X-3 | / | / | / | / | / | / | |
| 5.9 | X-1 | 132.1 | 134.4 | +1.7 | 149.3 | 159.5 | +6.8 |
| X-2 | 150.8 | 166.0 | +10.1 | 180.3 | 183.8 | +1.9 | |
| X-3 | 154.8 | 126.0 | −18.6 | 198.7 | 158.0 | −20.5 | |
| 7.6 | X-1 | 76.4 | 81.9 | +7.2 | 113.6 | 135.6 | +19.4 |
| X-2 | / | / | / | / | / | / | |
| X-3 | / | / | / | / | / | / | |
| 9.4 | X-1 | 47.7 | 62.3 | +30.6 | 83.8 | 80.2 | −4.3 |
| X-2 | 102.1 | 118.0 | +15.6 | 116.3 | 120.0 | +3.2 | |
| X-3 | 125.2 | 105.0 | −16.1 | 151.6 | 134.0 | −11.6 | |
| Additional Mass (kg) | Distribution Forms | 1st-Order Natural Frequency | 2nd-Order Natural Frequency | ||
|---|---|---|---|---|---|
| Measured Value (Hz) | Deviation (%) | Measured Value (Hz) | Deviation (%) | ||
| 0 | X-1 | 257.0 | 0.0 | 412.0 | 0.0 |
| Y-1 | 257.0 | 0.0 | 412.0 | 0.0 | |
| Z-1 | 257.0 | 0.0 | 412.0 | 0.0 | |
| 2.4 | X-1 | 159.3 | 0.0 | 236.5 | 0.0 |
| Y-1 | 159.3 | 0.0 | 236.5 | 0.0 | |
| Z-1 | 159.3 | 0.0 | 236.5 | 0.0 | |
| 4.2 | X-1 | 177.0 | 0.0 | 150.0 | 0.0 |
| Y-1 | 149.3 | −15.7 | 224.2 | −4.2 | |
| Z-1 | 150.0 | −15.3 | 220.0 | −6.0 | |
| 5.9 | X-1 | 134.4 | 0.0 | 159.5 | 0.0 |
| Y-1 | 118.4 | −11.9 | 131.3 | −17.7 | |
| Z-1 | 98.0 | −27.1 | 151.5 | −5.0 | |
| 7.6 | X-1 | 81.9 | 0.0 | 135.6 | 0.0 |
| Y-1 | 77.3 | −5.6 | 105.9 | −21.9 | |
| Z-1 | 60.0 | −2.7 | 116.2 | −14.3 | |
| 9.4 | X-1 | 62.3 | 0.0 | 80.2 | 0.0 |
| Y-1 | 60.5 | −2.9 | 60.3 | −24.8 | |
| Z-1 | 55.3 | −11.2 | 64.1 | −20.1 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, G.; Zhong, S.; Zhang, Q.; Zhong, J.; Liu, D. Effect of Additional Mass on Natural Frequencies of Weight-Sensing Structures. Sensors 2023, 23, 7585. https://doi.org/10.3390/s23177585
Guo G, Zhong S, Zhang Q, Zhong J, Liu D. Effect of Additional Mass on Natural Frequencies of Weight-Sensing Structures. Sensors. 2023; 23(17):7585. https://doi.org/10.3390/s23177585
Chicago/Turabian StyleGuo, Guiyong, Shuncong Zhong, Qiukun Zhang, Jianfeng Zhong, and Dongming Liu. 2023. "Effect of Additional Mass on Natural Frequencies of Weight-Sensing Structures" Sensors 23, no. 17: 7585. https://doi.org/10.3390/s23177585
APA StyleGuo, G., Zhong, S., Zhang, Q., Zhong, J., & Liu, D. (2023). Effect of Additional Mass on Natural Frequencies of Weight-Sensing Structures. Sensors, 23(17), 7585. https://doi.org/10.3390/s23177585