1. Introduction
Satellite navigation technology plays an essential role in various industries, as the world has entered a highly informationized era. Satellite navigation signals are affected by the ionosphere, atmospheric turbulence, and other factors during propagation, which can lead to severe attenuation [
1,
2,
3,
4], with minimum power levels as low as −160 dBW. Various types of interference [
5] can affect the weak signals. Intentional interference signals received by the Global Navigation Satellite System (GNSS) can be classified into two types: jamming interference and spoofing interference [
6,
7]. Accurately locating the interference source and eliminating its impact is crucial in the field of satellite navigation and communication. Estimating the direction of satellite interference sources can help in identifying multipath interference signals and utilizing beamforming technology to eliminate interference [
8,
9,
10], thus improving the signal’s robustness.
In recent years, research on interference monitoring systems in the field of satellite navigation has made some progress based on radio interference monitoring. The mainstream interference monitoring systems can be classified into airborne and ground monitoring platforms [
11], with the aim of identifying the source of the interference [
12]. Some researchers have designed ground interference monitoring platforms consisting of ground monitoring stations and monitoring vehicles, which can effectively measure the direction of interference signals and locate interference signals [
13]. For airborne interference monitoring platforms, unmanned aerial vehicles are used to locate the interference source, which can eliminate the influence of terrain and effectively approach the interference source to a certain extent [
14,
15,
16]. In the field of satellite navigation, research on interference source localization algorithms includes the utilization of adaptive filtering recursive least squares combined with generalized cross-correlation methods for delay estimation, as well as the use of TDOA algorithms for range localization of interference sources [
17]. In the range localization method, the two-step localization approach is mostly used, and its localization accuracy is affected by parameter estimation. In addition, there is a direct location method (Despreading Direct Position Determination, DS-DPD [
18]), which uses navigation signal characteristics to fuse TOA, Doppler frequency shift, and spreading sequences, aiming at scenarios with multiple spoofing interference sources. Although this method has high localization accuracy, it has significant computational complexity. With the development of array antenna technology [
19], research on the direction finding and localization of satellite navigation interference sources has become a popular field. Currently, space filtering [
20,
21,
22,
23], adaptive beamforming [
24,
25,
26], and DOA estimation technology [
27,
28,
29] based on array antenna technology have begun to be applied in the field of satellite navigation interference monitoring and anti-interference.
Satellite navigation signals are affected by jamming interference signals, which disrupt the receiver’s normal functioning by transmitting high-power noise signals with a certain bandwidth. Additionally, these interference signals are easily detectable [
30]. Spoofing interference signals simulate actual satellite signals and generate similar signals to mislead the receiver into tracking the fake signal. In addition, spoofing equipment can also forward actual signals, increase signal delay, and achieve the intended deception. Ultimately, these spoofing interference signals can cause errors in the receiver’s positioning results [
31]. Regarding the characteristics of DOA estimation for satellite navigation interference sources, firstly, due to the similarity between spoofing signals and actual signals and the low SNR, DOA estimation algorithms need to work properly under low SNR conditions to measure the direction of the spoofing interference signal. Secondly, satellite navigation signals are multi-frequency signals, which can lead to multiple interference sources being distributed across multiple frequency bands. Furthermore, there may be multiple interference sources, including multipath interference, within a single frequency band. This requires DOA estimation algorithms to have the ability to work with multiple signals and frequencies as well as coherent signals. Considering the above-mentioned characteristics of DOA estimation for satellite navigation interference sources, existing classical DOA estimation algorithms such as the multiple signal classification (MUSIC) algorithm [
32] and estimation of signal parameters via rotational invariance techniques (ESPRIT) algorithm [
33] can only achieve high-precision direction finding under conditions of high SNR and multiple snapshots. The traditional MUSIC algorithm processes the array signal in the time domain and eigen-decomposes the signal covariance matrix to obtain the signal subspace corresponding to the signal component and the noise subspace orthogonal to the signal component. Utilizing the orthogonality of the two spaces, it estimates the direction of incidence of the signal. However, the algorithm is seriously affected by noise, resulting in poor accuracy of direction finding under low SNR conditions. In addition, since interference sources with multiple frequencies can affect the selection of inter-element spacing and thus affect the estimation accuracy of wave arrival direction, traditional algorithms rarely explore interference sources with multiple sources and frequencies. In recent years, some researchers have adopted sparse reconstruction methods based on compressive sensing theory for DOA estimation signal models with spatial sparsity characteristics, due to low SNR conditions [
34]. This method has been applied to DOA estimation of interference sources in satellites and does not require prior knowledge of the number of interference sources. It achieves DOA estimation with fewer snapshots and improves estimation accuracy under low SNR conditions. In addition, this method can achieve high accuracy and resolution DOA estimation for multiple interference sources. However, this method does not consider the case where multiple interference sources are located at different frequency points. For multi-frequency signal DOA estimation, a sparse Bayesian learning-based multi-frequency DOA estimation algorithm has been proposed for passive radar [
35], and a multi-frequency sparse reconstruction DOA algorithm based on mutual correlation array structure has also been proposed [
36]. The above algorithms are based on optimization theory and changes in array structure to achieve multi-frequency signal DOA estimation. Regarding the DOA estimation of coherent signals, the spatial smoothing algorithm was initially proposed for uniform linear arrays [
37] to achieve coherent signal separation by reducing the degrees of freedom of the array. In addition, a special array antenna model was used to reconstruct the Toeplitz matrix and achieve coherent signal separation [
38]. Previous methods were unable to simultaneously perform DOA estimation on multi-frequency signals. They performed poorly in low SNR conditions and in estimating the DOA of coherent signals. They were unable to meet the requirements under all three aforementioned conditions simultaneously. The main contributions of this study are as follows: An algorithm for DOA estimation for satellite navigation interference sources under multi-frequency points and low signal-to-noise ratio conditions is proposed. The innovative time–frequency conversion processing of the array-received signal reduces the influence of noise and effectively improves the DOA estimation accuracy of the algorithm under the condition of low SNR, in addition to the excellent DOA estimation results for the same-frequency coherent signal. The feasibility of the algorithm is verified by simulation experiments.
The following sections will discuss our work in detail.
Section 2 introduces the basic mathematical model of DOA estimation algorithms and the basic steps of our proposed FDCMR method. In
Section 3, the feasibility of our FDCMR method is validated through simulation experiments, and a comparative analysis is conducted with three other algorithms to further demonstrate the superiority of our algorithm. Additionally, different interference scenarios are simulated for algorithm testing, such as scenarios with multiple coherent sources at the same frequency point, scenarios with multiple coherent sources at multiple frequency points, and scenarios with both coherent and incoherent sources at multiple frequency points. The final section provides a discussion and conclusion.
3. Results
To validate the performance of the DOA estimation algorithm, the root mean square error (RMSE) is used to evaluate the algorithm performance:
where
represents the angle of the q-th incident signal in the i-th Monte Carlo experiment, and a total of D = 300 Monte Carlo experiments are conducted. Q represents the number of incident signal sources. We assume that there are Q = 2 incident signals, with signal frequencies of
= 1575.42 MHz for GPS navigation satellite L1 frequency and
= 1268.52 MHz for BeiDou navigation satellite B3 frequency. The incident signal angles are
and
. The number of array antennas is
, and the number of snapshots is
.
3.1. Experiment 1
A comparison is presented between the spatial spectra of the algorithm proposed in this paper and those of the traditional MUSIC algorithm under low SNR conditions. The conditions of SNR at −15 dB, −5 dB, 0 dB, and 10 dB are compared individually, as demonstrated by
Figure 3.
From
Figure 3a, it can be observed that at an SNR of −15 dB, the traditional MUSIC algorithm fails to resolve the two incident signals correctly, and the DOA estimation results are erroneous. However, the algorithm proposed in this paper can clearly distinguish between the two incident signals. Both algorithms presented in
Figure 3b–d successfully resolve the two signals. However, the traditional MUSIC algorithm exhibits wider spatial spectrum peaks, which indicates lower signal resolution compared to the method proposed in this paper.
3.2. Experiment 2
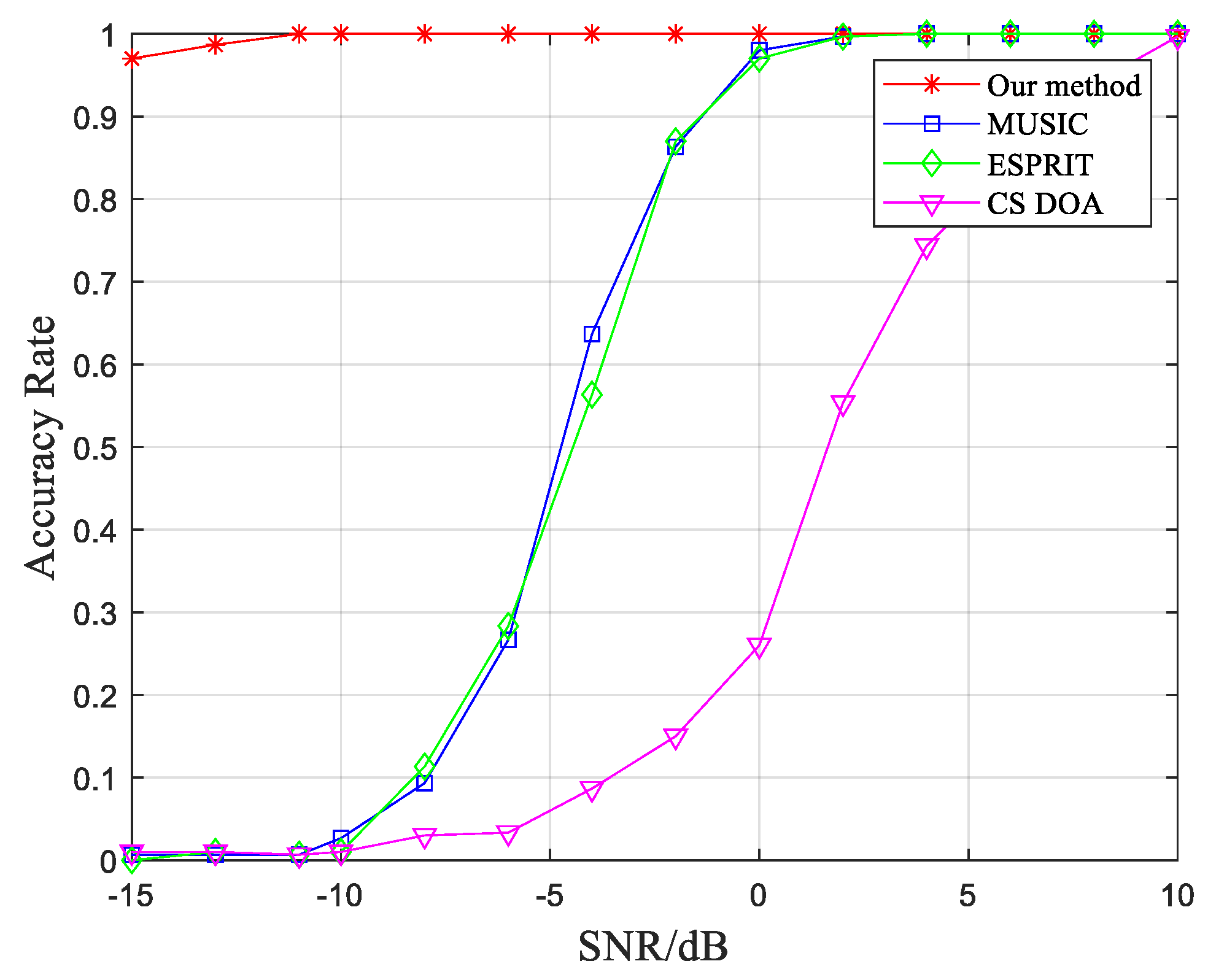
To validate the success probability of the algorithm for DOA estimation under various SNR conditions, a series of Monte Carlo experiments are conducted. The SNR is increased gradually from −15 dB to 10 dB with an interval of 2 dB, and each experiment is repeated 300 times. For reference, the success probability of three other methods, namely the conventional MUSIC, ESPRIT, and compressed sensing-based orthogonal matching pursuit algorithm [
39], are also calculated under different SNR conditions. The experimental results are shown in
Figure 4.
From
Figure 4, it can be observed that the proposed method achieves higher accuracy in DOA estimation under low SNR conditions. In contrast, the traditional MUSIC and ESPRIT algorithms experience a rapid decline in DOA estimation accuracy when the SNR falls below 0 dB. When the SNR drops below −10 dB, these two algorithms become practically ineffective. On the other hand, the compressed sensing-based DOA estimation algorithm offers the advantage of reduced computational time since it only selects a single snapshot signal for DOA estimation. However, its accuracy is compromised under low SNR conditions, resulting in a significant decrease in success probability compared to the other three estimation algorithms.
3.3. Experiment 3
In addition to the success rate of DOA estimation, the accuracy of the algorithm’s DOA estimation is also a crucial factor. The RMSE mentioned in Equation (27) is used as the performance evaluation criterion for the algorithm. The experimental conditions are the same as those used to validate the success probability of DOA estimation in the previous analysis. Since the algorithms in the control group exhibit lower accuracy in DOA estimation under low SNR conditions, the RMSE is calculated for SNR values ranging from 0 dB to 10 dB. Experimental results are presented in
Figure 5.
From
Figure 5, it is evident that the proposed method exhibits a smaller RMSE compared to the traditional MUSIC algorithm, ESPRIT algorithm, and compressed sensing-based DOA estimation algorithm. This significant improvement in DOA estimation performance can meet the requirements of practical applications.
To verify the higher accuracy of the proposed algorithm in DOA estimation under low SNR conditions, the SNR is set in the range of −15 dB to 10 dB. In each simulation experiment, the Monte Carlo experiment is repeated 300 times, and a box plot is generated to visualize the statistical distribution of the DOA estimation results. From
Figure 6, it can be observed that at an SNR of −15 dB, the DOA estimation results are within the theoretical range of ±3°, with the majority concentrated within an error range of ±1°. As the SNR increases, the error range gradually narrows.
3.4. Experiment 4
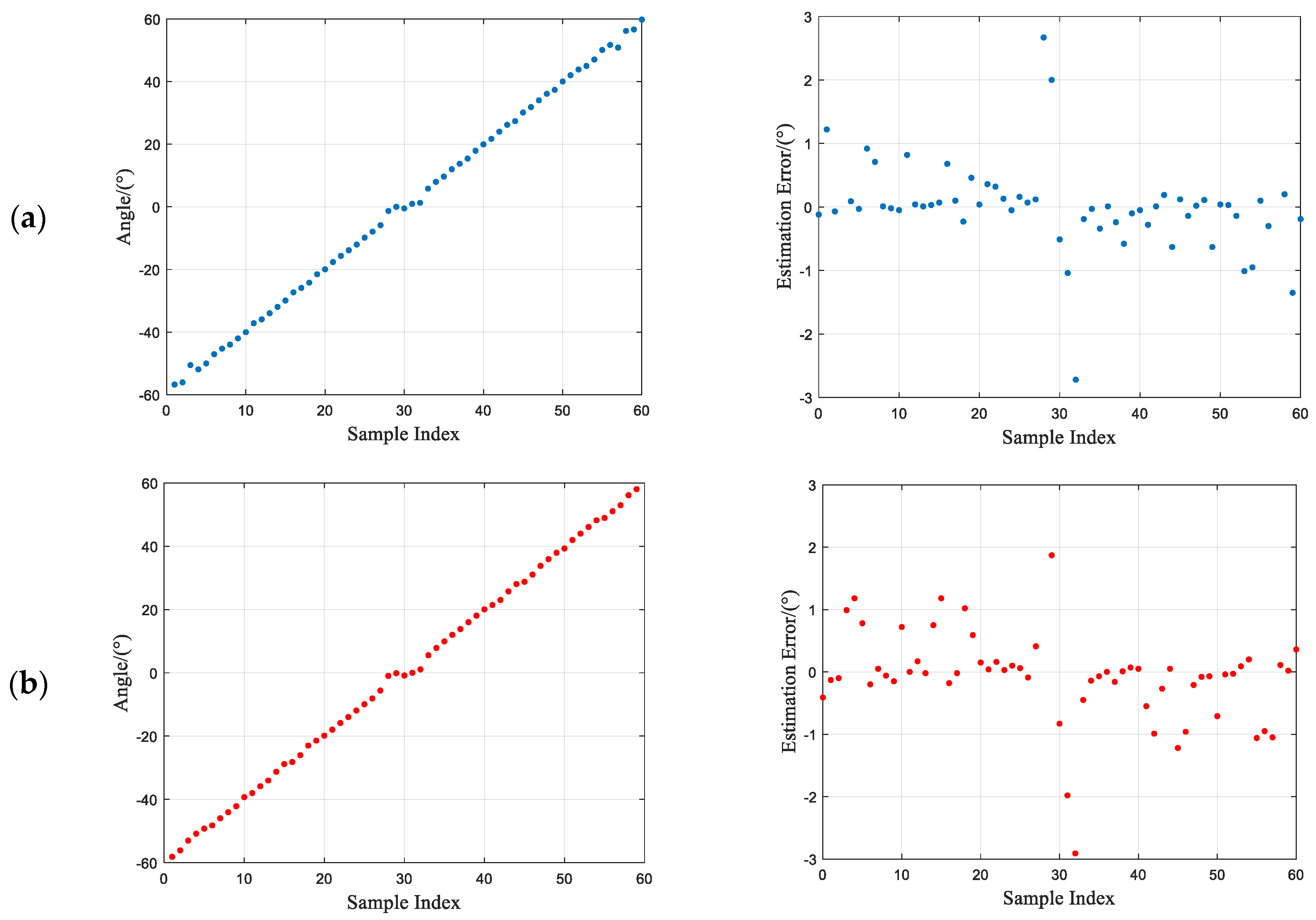
To further validate the robustness of the algorithm in DOA estimation for different angles, the experiment analyzes the change in the incident direction of two signals with different frequencies, ranging from −60° to 60° with an interval of 2°. The SNR is set to −10 dB. The DOA estimation results are shown in
Figure 7.
From
Figure 7, it can be observed that the proposed algorithm exhibits strong robustness. Within the range of [−60°, 60°], even under low SNR conditions, the error remains within a range of ±2°, with a few points reaching ±3°. In this experiment, a relatively low SNR is set, which introduces significant noise. If the interference from noise is further reduced, the error in the experimental results may decrease even further.
To validate that the algorithm is suitable for DOA estimation applications in satellite interference scenarios, considering the characteristics of low SNR, multiple frequency points, and phase coherence, simulations are conducted under the following application scenarios.
3.5. Scenario 1: Multiple Coherent Sources at the Same Frequency
The scenario assumes there are interference signals, both of which are coherent signals with a frequency of = 1268.52 MHz, corresponding to the BeiDou Navigation Satellite System (BDS) signal at the B3 frequency point. The incident angles of the two signals are and , respectively. The array consists of antenna elements, and the number of snapshots is . The SNR is −10 dB.
From
Figure 8, it can be observed that due to the interference sources being coherent signals, the received signal’s frequency domain covariance matrix is no longer full rank. In this case,
, indicates a rank-deficient matrix. When performing the eigen value decomposition of the covariance matrix, only
signal eigenvectors can be obtained. In this experiment,
is set, so only one eigenvalue of the covariance matrix is non-zero. Consequently, when constructing the signal subspace using the eigenvectors, the complete signal subspace cannot be obtained since its dimension is smaller than the number of sources. However, by performing time–frequency transformations on the received signals from the array, the data at the target frequency point already contains information about the two coherent sources with the same frequency but different incident angles. Therefore, even if the dimension of the signal subspace is smaller than the number of sources, the proposed algorithm can still distinguish between the two incident directions, as shown in
Figure 9’s spatial spectrum.
3.6. Scenario 2: Multiple Coherent Sources at Multiple Frequency Points
Assuming there are interference signals, the first two interference signals are coherent signals with a frequency of = 1575.42 MHz, corresponding to the GPS navigation satellite signal at the L1 frequency point. The incident angles of these two signals are and , respectively. The other two interference signals are also coherent signals with a frequency of = 1268.52 MHz, corresponding to the BDS signal at the B3 frequency point. The incident angles of these two signals are and , respectively. The array consists of antenna elements, and the number of snapshots is . The SNR is −10 dB.
When there are interference signals at two frequency points, each with two coherent signals, the rank of the received signal covariance matrix can be determined as 2, according to the formula. Therefore, in
Figure 10, the eigenvalue matrix of the frequency domain covariance matrix shows two eigenvalues, corresponding to the number of frequency points.
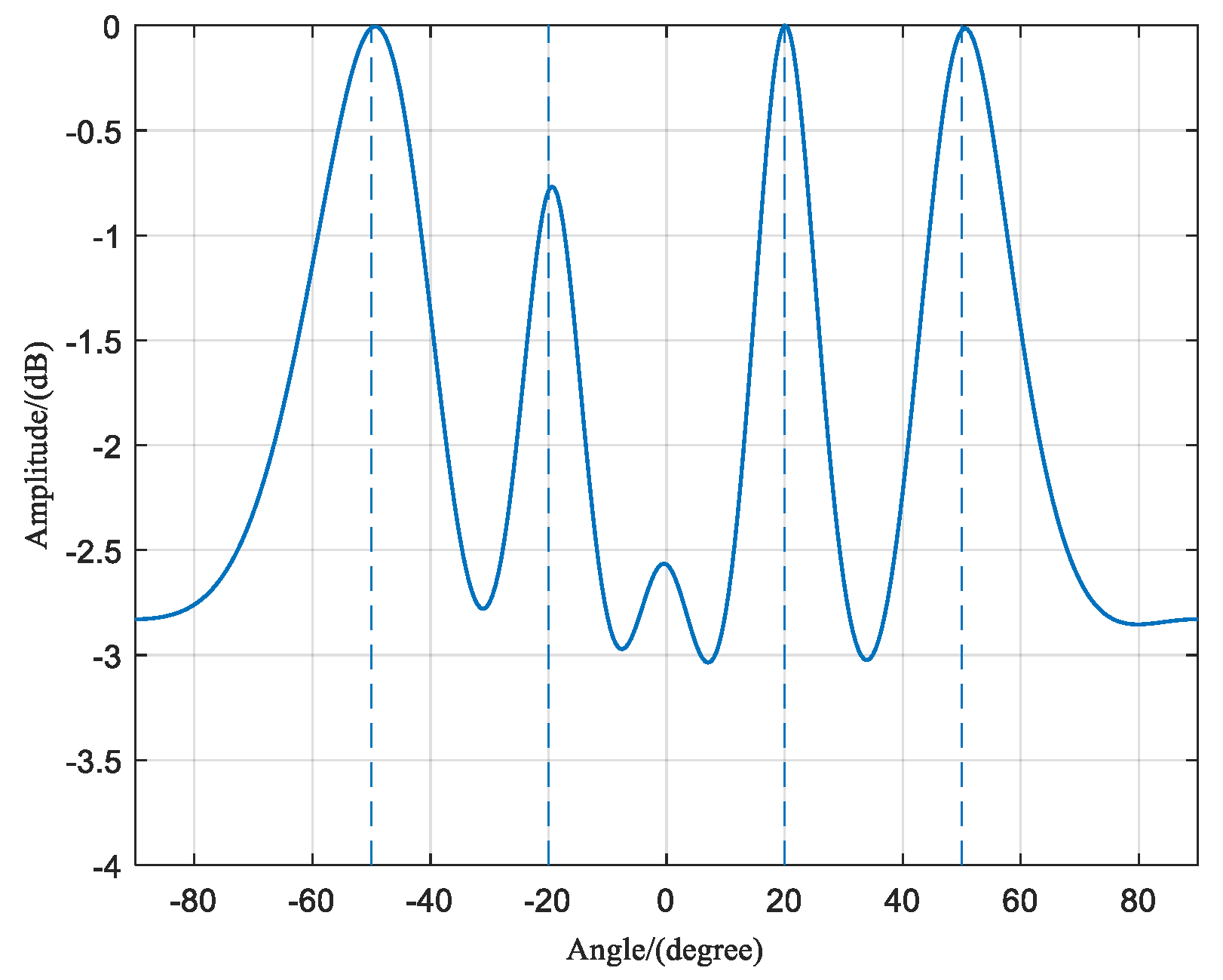
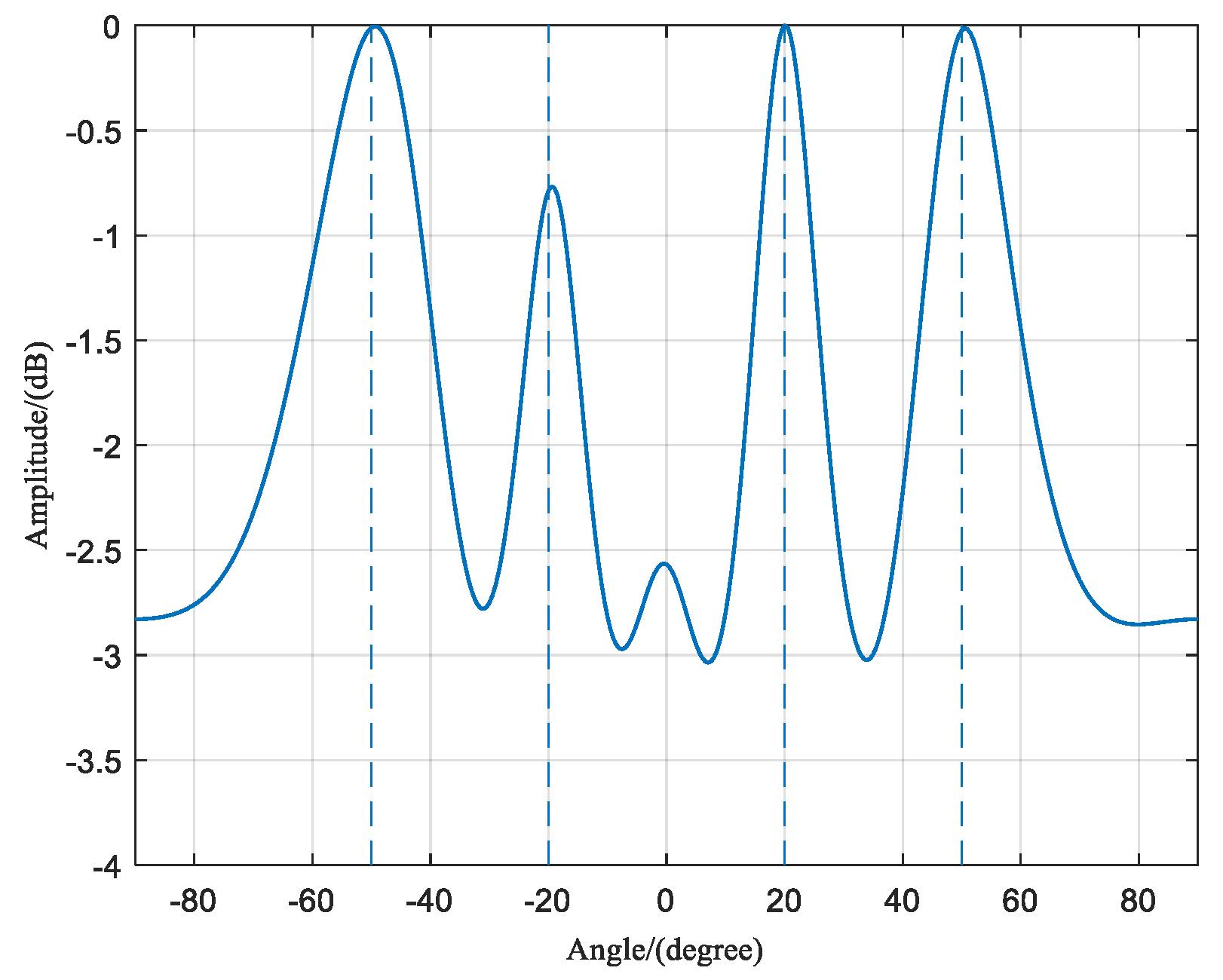
Figure 11 shows the spatial spectrum of the DOA estimation using the proposed algorithm. It clearly distinguishes the two coherent signals in the two frequency points and achieves accurate DOA estimation with minimal error.
3.7. Scenario 3: Coexistence of Incoherent and Coherent Sources at Multiple Frequency Points
Assuming there are interference signals, the first two interference signals are coherent signals with a frequency of = 1575.42 MHz, corresponding to the GPS navigation satellite signal at the L1 frequency point. The incident angles of these two signals are and , respectively. The last interference signal is an incoherent signal with a frequency of = 1268.52 MHz, corresponding to the BDS signal at the B3 frequency point. The incident angle of this signal is . The array consists of antenna elements, and the number of snapshots is . The SNR is −10 dB.
In the case where there are interference signals at two frequency points, with one frequency point containing two coherent signals, the frequency domain covariance matrix of the received signal is
.
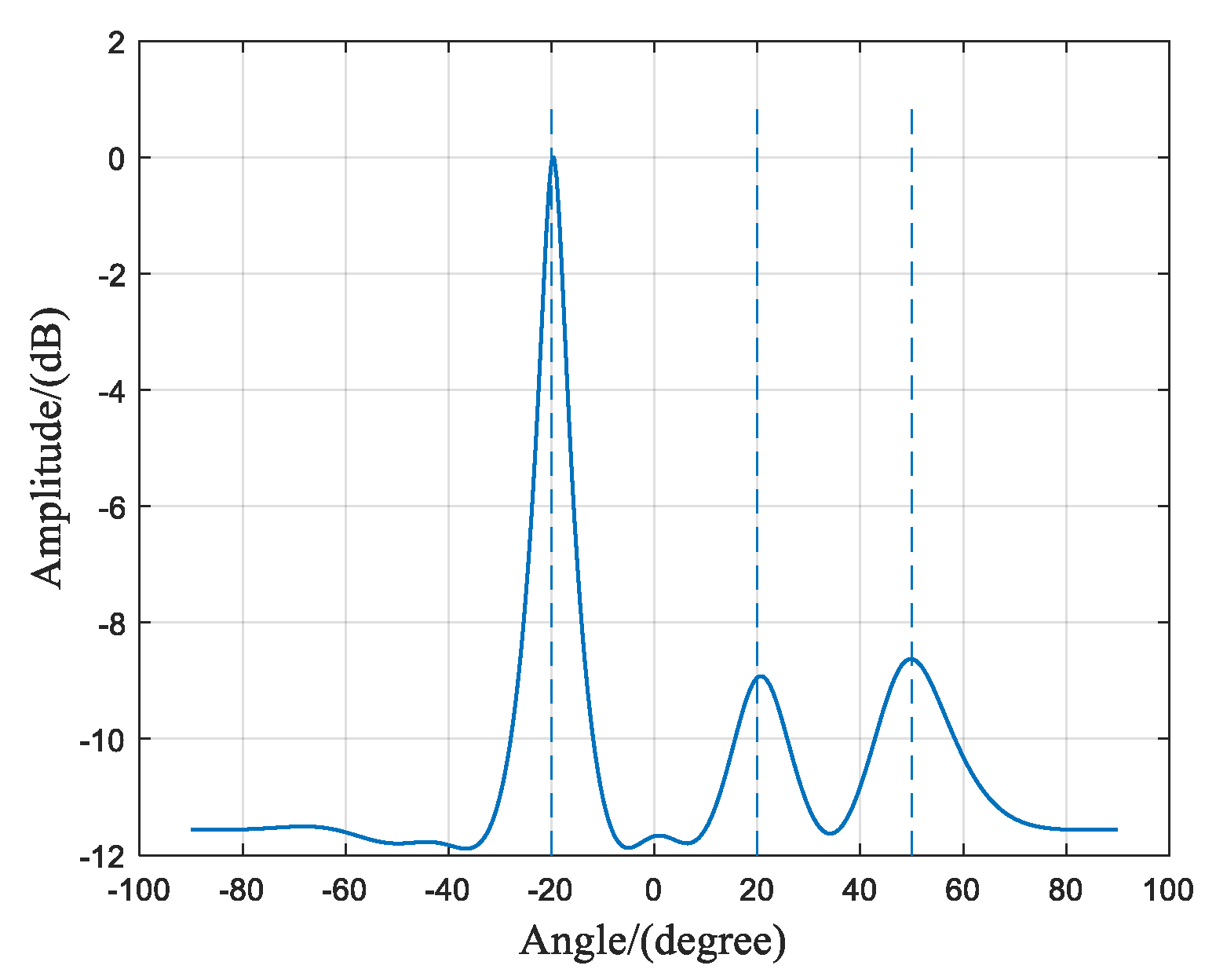
Figure 12 shows two peaks, which further confirms that the eigenvalues of the frequency domain covariance matrix of the array-received signals are related to the number of target frequency points.
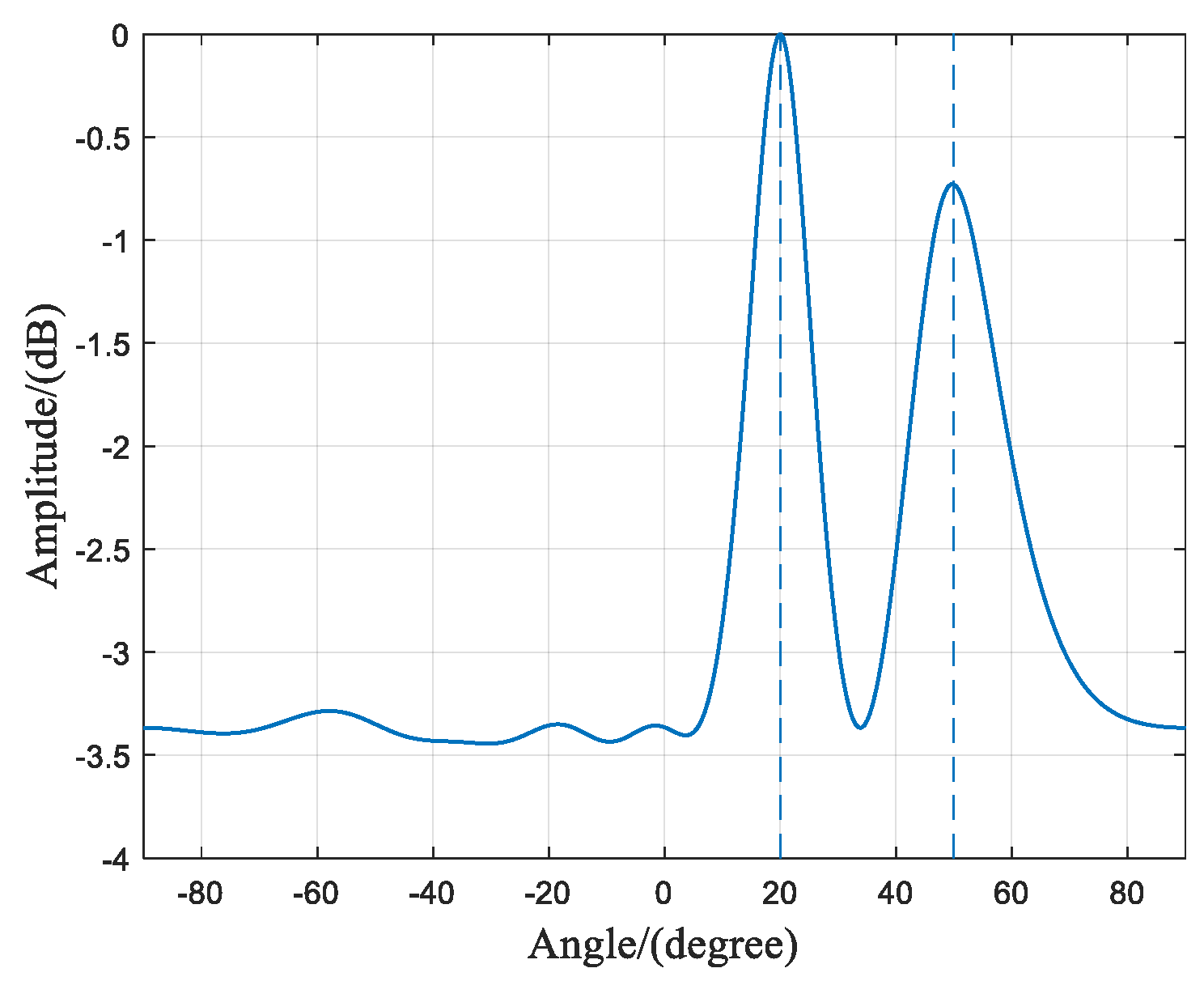
Figure 13 represents the spatial spectrum of the DOA estimation using the proposed algorithm. Despite the interference signals at 20° and 50° being two coherent signals at the same frequency point, their amplitudes in the spatial spectrum are relatively smaller compared to the signals at the other frequency point. However, this does not affect the accuracy of the DOA estimation results.
The feasibility of this method in the estimation of DOA for multi-frequency coherent signals has been verified through simulations involving scenarios with multiple coherent sources at the same frequency, multiple coherent sources at multiple frequencies, and the coexistence of multiple coherent sources and incoherent sources at multiple frequencies. By using the same frequency as the satellite navigation signals, the method’s feasibility in the estimation of DOA for multifrequency coherent signals has been confirmed. Moreover, in the scenario of DOA estimation for satellite navigation interference sources, the presence of multi-frequency coherent signals, such as multipath interference signals, suppression interference signals at different frequencies, and deception interference signals, should also be considered. Therefore, this method is promising for the estimation of DOA in satellite navigation interference source scenarios.
4. Discussion
In this paper, the FDCMR method is proposed to address the following challenges in the field of satellite interference source DOA estimation. Spoofing interference signals are similar to the original navigation satellite signals and exhibit high levels of camouflage. Thus, the DOA estimation algorithm must be able to perform robustly even in low SNR conditions in order to effectively handle such interference signals. Multiple frequency point interference signals and coherent signals exist in satellite navigation systems. The DOA estimation algorithm should be capable of accurately estimating the DOA of multiple coherent signals at various frequency points.
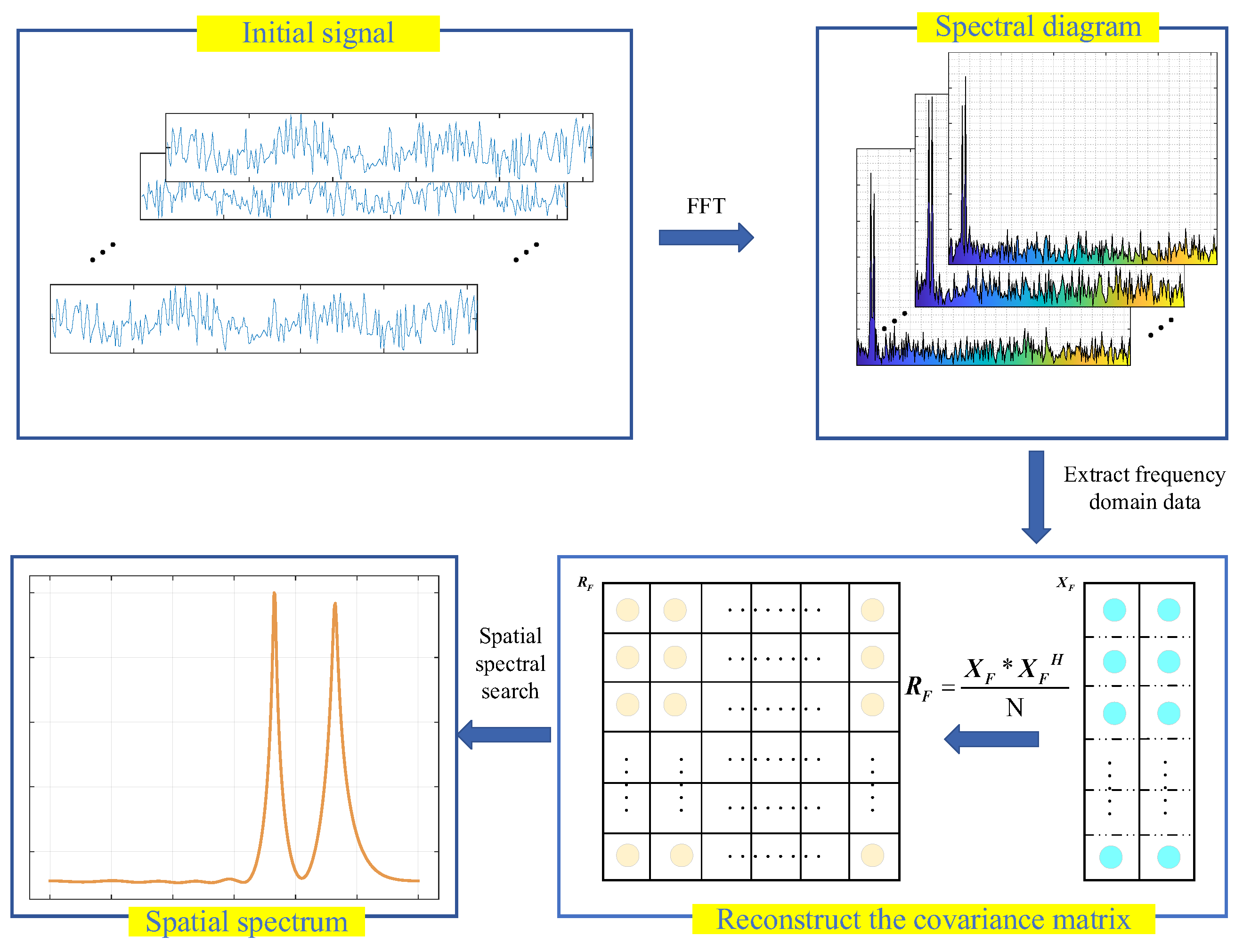
This paper presents an algorithm for fast and accurate estimation of DOA for multi-frequency coherent signals under low SNR conditions. The algorithm utilizes FFT on the received signal matrix to extract the target signal at the corresponding frequencies, known as frequency domain peak signals. It reconstructs the data covariance matrix and uses spatial spectrum search to plot the spatial spectrum, thereby achieving DOA estimation of the target signal. The algorithm applies frequency domain filtering by extracting the target frequency data, discarding irrelevant frequency data, reducing noise interference, and improving the algorithm’s performance under low SNR conditions. FDCMR can be used for DOA estimation in satellite navigation positioning, even in the presence of various active interferences such as jamming and spoofing. The feasibility and effectiveness of this algorithm are verified through simulation experiments. Compared to other DOA estimation algorithms, this method has significant advantages in low SNR conditions and is crucial for addressing various active interferences in satellite navigation.
Currently, the focus of this work is mainly on DOA estimation based on one-dimensional linear arrays. However, to achieve an estimation of azimuth and elevation angles of multi-frequency signals within a spatial volume, it is necessary to construct a two-dimensional planar array structure. In future work, efforts will be made to extend the method proposed in this paper to two-dimensional DOA estimation algorithms.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}