
Fisher-Information-Matrix-Based USBL Cooperative Location in USV–AUV Networks

 ,
, {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
- (1)
- We design a USV–AUV network structure for locating AUVs during underwater missions, where we model sonar-based underwater communication.
- (2)
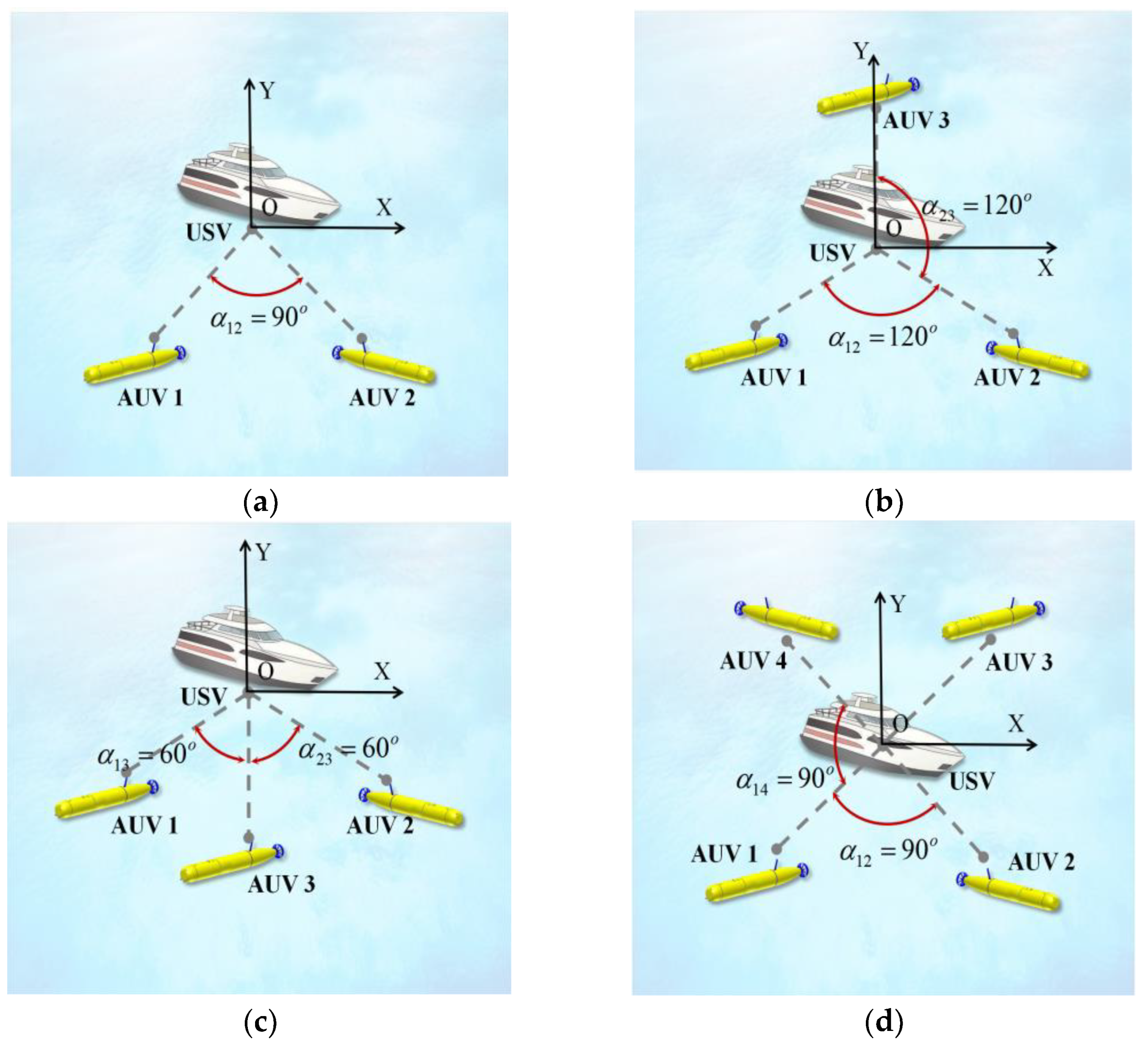
- A collaborative positioning scheme based on USBL is proposed. The Fisher information matrix is used to analyze the positioning accuracy, and then the optimal array for the AUV formation is derived.
- (3)
- We design a USV path planning scheme for underwater positioning based on the Dubins paths.
2. System Model
2.1. USV–AUV Networks
2.2. Underwater Acoustic Communication Model for USBL
3. Methods
3.1. Orthogonal Array USBL Cooperative Location
3.2. Fisher Information Matrix Based on USBL Location Model
3.3. Aided Location Analysis Based on Fisher Information Matrix
3.4. USV Path Planning Based on Dubins Path

4. Simulation Settings and Results
4.1. Path Planning for the Moving USV
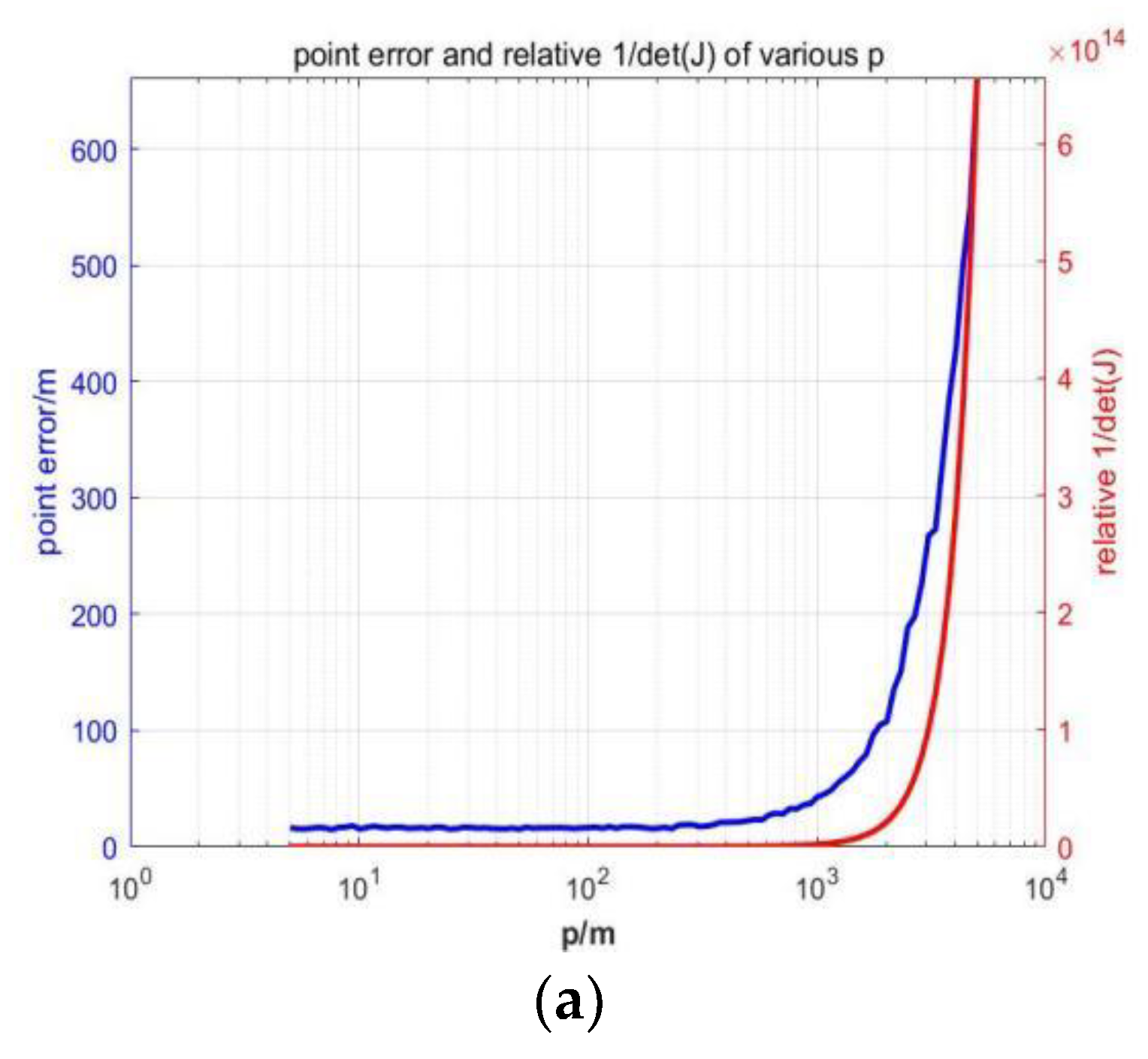
4.2. Analysis of Distance to Positioning Accuracy
4.3. Analysis of Formation to Positioning Accuracy
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Mohsan, S.A.; Mazinani, A.; Othman, N.Q.; Amjad, H. Towards the internet of underwater things: A comprehensive survey. Earth Sci. Inform. 2022, 15, 735–764. [Google Scholar]
- Sahoo, A.; Dwivedy, S.K.; Robi, P. Advancements in the field of autonomous underwater vehicle. Ocean Eng. 2019, 181, 145–160. [Google Scholar] [CrossRef]
- Hou, X.; Wang, J.; Bai, T.; Deng, Y.; Ren, Y.; Hanzo, L. Environment-Aware AUV Trajectory Design and Resource Man-agement for Multi-Tier Underwater Computing. IEEE J. Sel. Areas Commun. 2023, 41, 474–490. [Google Scholar] [CrossRef]
- Xing, H.; Liu, Y.; Guo, S.; Shi, L.; Hou, X.; Liu, W.; Zhao, Y. A Multi-Sensor Fusion Self-Localization System of a Miniature Underwater Robot in Structured and GPS-Denied Environments. IEEE Sens. J. 2021, 21, 27136–27146. [Google Scholar] [CrossRef]
- Garcia, J.; Soto, S.; Sultana, A.; Leclerc, J.; Pan, M.; Becker, A.T. Underwater Robot Localization Using Magnetic Induction: Noise Modeling and Hardware Validation. In Proceedings of the Global Oceans 2020, Biloxi, MS, USA, 5–30 October 2020; pp. 1–5. [Google Scholar] [CrossRef]
- Chame, H.F.; dos Santos, M.M.; Botelho, S.S.d.C. Neural network for black-box fusion of underwater robot localization under unmodeled noise. Robot. Auton. Syst. 2018, 110, 57–72. [Google Scholar] [CrossRef]
- Du, J.; Jiang, B.; Jiang, C.; Shi, Y.; Han, Z. Gradient and Channel Aware Dynamic Scheduling for Over-the-Air Computation in Federated Edge Learning Systems. IEEE J. Sel. Areas Commun. 2023, 41, 1035–1050. [Google Scholar] [CrossRef]
- Hu, C.; Zhu, S.; Liang, Y.; Mu, Z.; Song, W. Visual-Pressure Fusion for Underwater Robot Localization with Online Initialization. IEEE Robot. Autom. Lett. 2021, 6, 8426–8433. [Google Scholar] [CrossRef]
- Hou, X.; Wang, J.; Fang, Z.; Zhang, X.; Song, S.; Zhang, X.; Ren, Y. Machine-Learning-Aided Mission-Critical Internet of Underwater Things. IEEE Netw. 2021, 35, 160–166. [Google Scholar] [CrossRef]
- Zhang, F.; Washington, P.; Paley, D.A. A flexible, reaction-wheel-driven fish robot: Flow sensing and flow-relative control. In Proceedings of the 2016 American Control Conference (ACC), Boston, MA, USA, 6–8 July 2016; pp. 1221–1226. [Google Scholar] [CrossRef]
- Lee, K.C.; Ou, J.S.; Huang, M.C.; Fang, M.C. A novel location estimation based on pattern matching algorithm in underwater envi-ronments. Appl. Acoust. 2009, 70, 479–483. [Google Scholar] [CrossRef]
- Kim, D.; Lee, D.; Myung, H.; Choi, H.-T. Artificial landmark-based underwater localization for AUVs using weighted template matching. Intell. Serv. Robot. 2014, 7, 175–184. [Google Scholar] [CrossRef]
- Du, J.; Jiang, C.; Benslimane, A.; Guo, S.; Ren, Y. SDN-Based Resource Allocation in Edge and Cloud Computing Systems: An Evolutionary Stackelberg Differential Game Approach. IEEE/ACM Trans. Netw. 2022, 30, 1613–1628. [Google Scholar] [CrossRef]
- Bahr, A.; Leonard, J.J.; Martinoli, A. Dynamic positioning of beacon vehicles for cooperative underwater navigation. In Proceedings of the 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems, Vilamoura, Portugal, 7–12 October 2012; pp. 3760–3767. [Google Scholar] [CrossRef]
- Tang, C.; Yu, B.; Zhang, L.; Zhang, Y.; Song, H. Factor graph weight particles aided distributed underwater cooperative positioning algorithm. Telecommun. Syst. 2022, 79, 181–191. [Google Scholar] [CrossRef]
- Vasilijevic, A.; Nad, D.; Miskovic, N. Autonomous Surface Vehicles as Positioning and Communications Satellites for the Marine Operational Environment—Step toward Internet of Underwater Things. In Proceedings of the 2018 IEEE 8th International Conference on Underwater System Technology: Theory and Applications (USYS), Wuhan, China, 1–3 December 2018; pp. 1–5. [Google Scholar] [CrossRef]
- Lin, C.; Han, G.; Guizani, M.; Bi, Y.; Du, J.; Shu, L. An SDN Architecture for AUV-Based Underwater Wireless Networks to Enable Cooperative Underwater Search. IEEE Wirel. Commun. 2020, 27, 132–139. [Google Scholar] [CrossRef]
- Zhang, L.; Tang, C.; Chen, P.; Zhang, Y. Gaussian Parameterized Information Aided Distributed Cooperative Underwater Positioning Algorithm. IEEE Access 2020, 8, 64634–64645. [Google Scholar] [CrossRef]
- Du, J.; Jiang, C.; Wang, J.; Ren, Y.; Debbah, M. Machine Learning for 6G Wireless Networks: Carrying Forward Enhanced Bandwidth, Massive Access, and Ultrareliable/Low-Latency Service. IEEE Veh. Technol. Mag. 2020, 15, 122–134. [Google Scholar] [CrossRef]
- Yang, Z.; Du, J.; Xia, Z.; Jiang, C.; Benslimane, A.; Ren, Y. Secure and Cooperative Target Tracking via AUV Swarm: A Re-inforcement Learning Approach. In Proceedings of the 2021 IEEE Global Communications Conference (GLOBECOM), Madrid, Spain, 7–11 December 2021; pp. 1–6. [Google Scholar]
- Duan, R.; Du, J.; Jiang, C.; Ren, Y. Value-Based Hierarchical Information Collection for AUV-Enabled Internet of Under-water Things. IEEE Internet Things J. 2020, 7, 9870–9883. [Google Scholar] [CrossRef]
- Fang, Z.; Wang, J.; Du, J.; Hou, X.; Ren, Y.; Han, Z. Stochastic Optimization-Aided Energy-Efficient Information Collection in Internet of Underwater Things Networks. IEEE Internet Things J. 2022, 9, 1775–1789. [Google Scholar] [CrossRef]
- Caiti, A.; Di Corato, F.; Fenucci, D.; Allotta, B.; Costanzi, R.; Monni, N.; Pugi, L.; Ridolfi, A. Experimental results with a mixed USBL/LBL system for AUV navigation. In Proceedings of the 2014 Underwater Communications and Networking (UComms), Sestri Levante, Italy, 3–5 September 2014; pp. 1–4. [Google Scholar]
- Meng, L.; Spall, J.C. Efficient computation of the Fisher information matrix in the EM algorithm. In Proceedings of the 2017 51st Annual Conference on Information Sciences and Systems (CISS), Baltimore, MD, USA, 22–24 March 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Li, X.; Fang, Y.; Fu, W. UAV Path Planning Based on Shuffled Frog-Leaping Algorithm and Dubins Path. In Proceedings of the 2020 39th Chinese Control Conference (CCC), Shenyang, China, 27–29 July 2020; pp. 3990–3995. [Google Scholar] [CrossRef]
- Wu, Y.; Low, K.H.; Lv, C. Cooperative Path Planning for Heterogeneous Unmanned Vehicles in a Search-and-Track Mission Aiming at an Underwater Target. IEEE Trans. Veh. Technol. 2020, 69, 6782–6787. [Google Scholar] [CrossRef]
- Cao, H.; Guo, Z.; Gu, Y.; Zhou, J. Design and Implementation of Unmanned Surface Vehicle for Water Quality Monitoring. In Proceedings of the 2018 IEEE 3rd Advanced Information Technology, Electronic and Automation Control Conference (IAEAC), Chongqing, China, 12–14 October 2018; pp. 1574–1577. [Google Scholar] [CrossRef]
- Wang, C.; Cai, W.; Lu, J.; Ding, X.; Yang, J. Design, Modeling, Control, and Experiments for Multiple AUVs Formation. IEEE Trans. Autom. Sci. Eng. 2022, 19, 2776–2787. [Google Scholar] [CrossRef]
- Sasano, M.; Inaba, S.; Okamoto, A.; Seta, T.; Tamura, K.; Ura, T.; Sawada, S.; Suto, T. Development of a regional underwater positioning and communication system for control of multiple autonomous underwater vehicles. In Proceedings of the 2016 IEEE/OES Autonomous Underwater Vehicles (AUV), Tokyo, Japan, 6–9 November 2016; pp. 431–434. [Google Scholar]
- Sun, S.; Zhang, X.; Zheng, C.; Fu, J.; Zhao, C. Underwater Acoustical Localization of the Black Box Utilizing Single Autonomous Underwater Vehicle Based on the Second-Order Time Difference of Arrival. IEEE J. Ocean. Eng. 2020, 45, 1268–1279. [Google Scholar] [CrossRef]









Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Z.; Xu, J.; Feng, Y.; Wang, Y.; Xie, G.; Hou, X.; Men, W.; Ren, Y. Fisher-Information-Matrix-Based USBL Cooperative Location in USV–AUV Networks. Sensors 2023, 23, 7429. https://doi.org/10.3390/s23177429
Wang Z, Xu J, Feng Y, Wang Y, Xie G, Hou X, Men W, Ren Y. Fisher-Information-Matrix-Based USBL Cooperative Location in USV–AUV Networks. Sensors. 2023; 23(17):7429. https://doi.org/10.3390/s23177429
Chicago/Turabian StyleWang, Ziyuan, Jingzehua Xu, Yuanzhe Feng, Yijing Wang, Guanwen Xie, Xiangwang Hou, Wei Men, and Yong Ren. 2023. "Fisher-Information-Matrix-Based USBL Cooperative Location in USV–AUV Networks" Sensors 23, no. 17: 7429. https://doi.org/10.3390/s23177429
APA StyleWang, Z., Xu, J., Feng, Y., Wang, Y., Xie, G., Hou, X., Men, W., & Ren, Y. (2023). Fisher-Information-Matrix-Based USBL Cooperative Location in USV–AUV Networks. Sensors, 23(17), 7429. https://doi.org/10.3390/s23177429