
A New Deep Learning Framework for Imbalance Detection of a Rotating Shaft



Abstract
1. Introduction
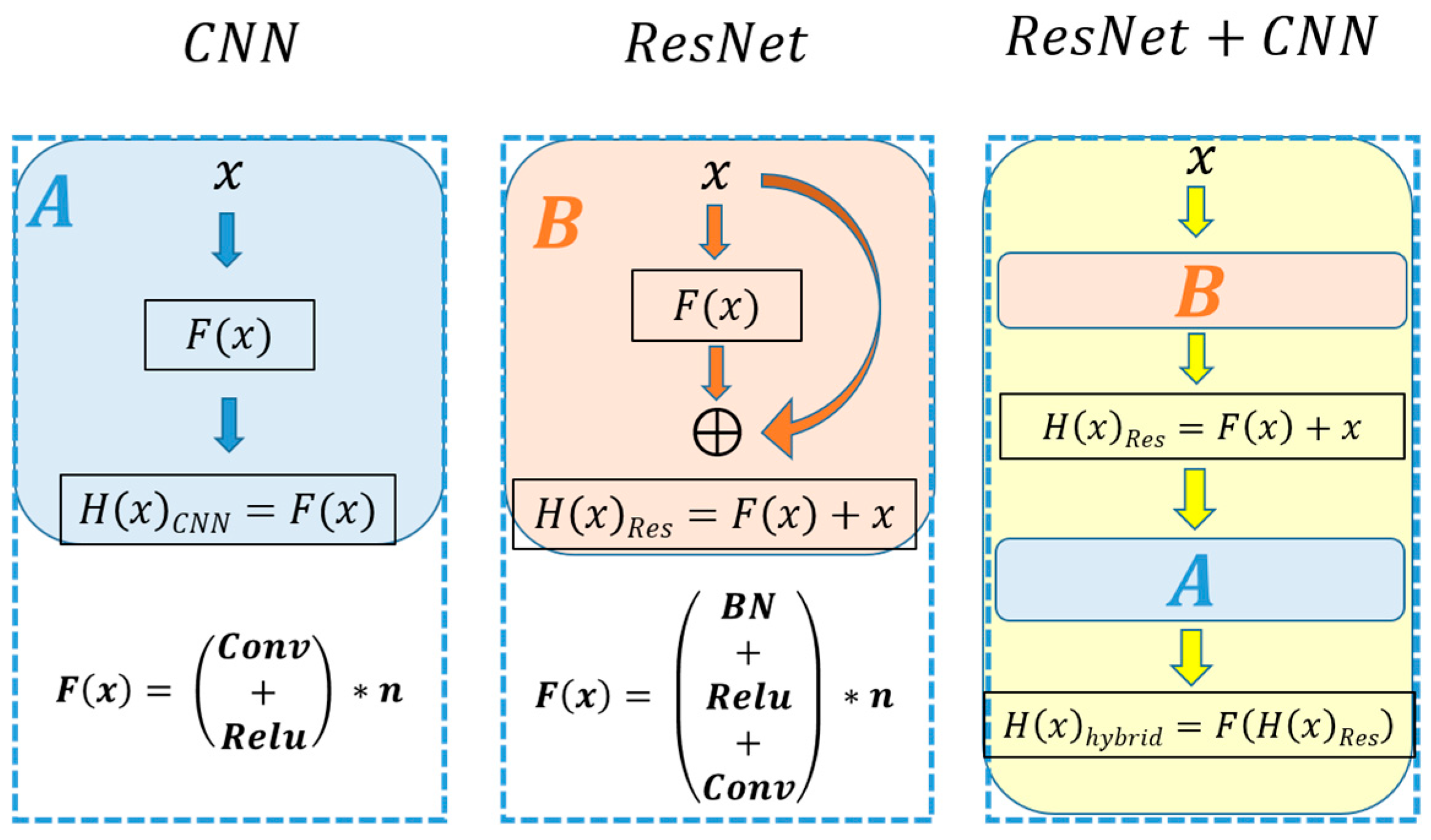
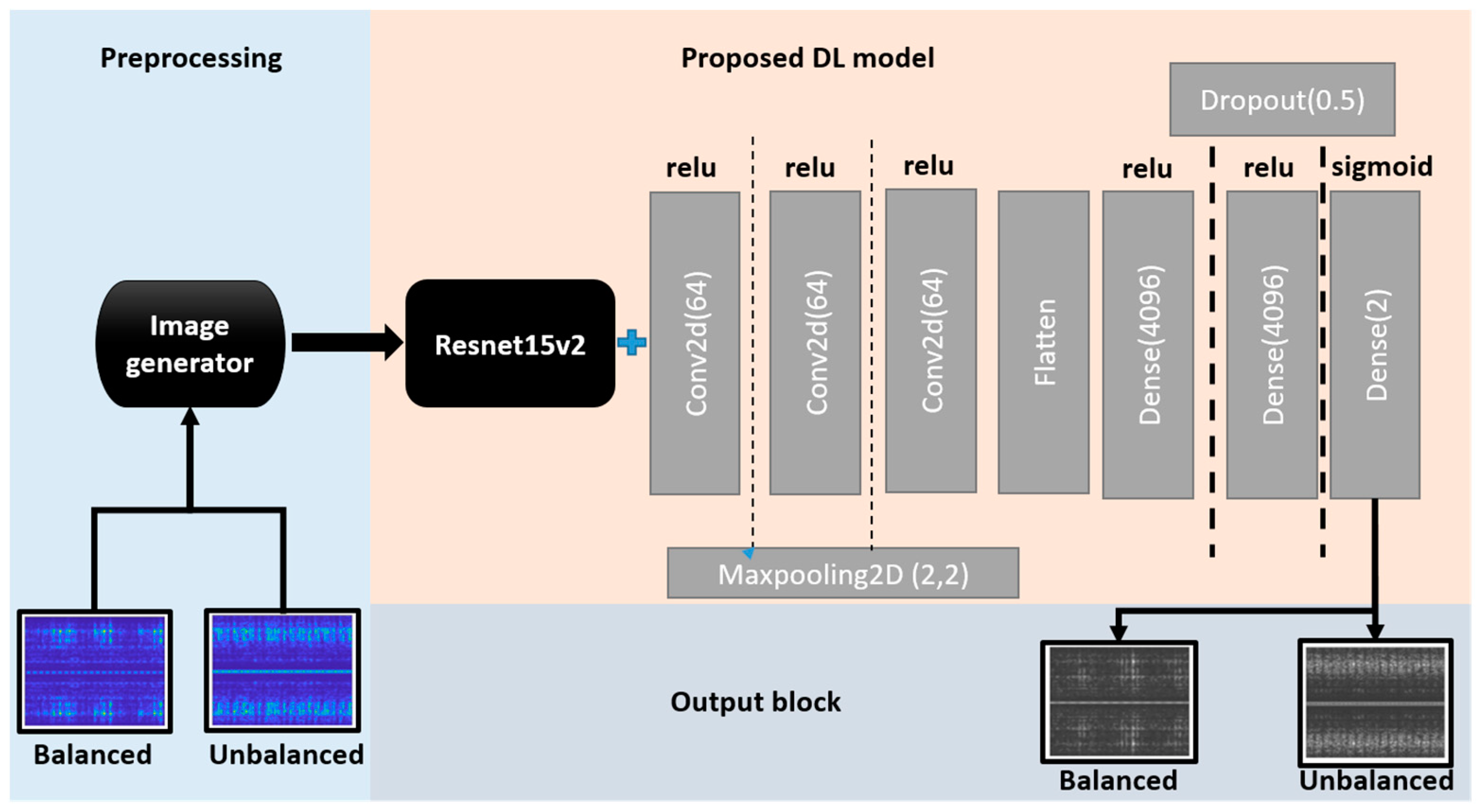
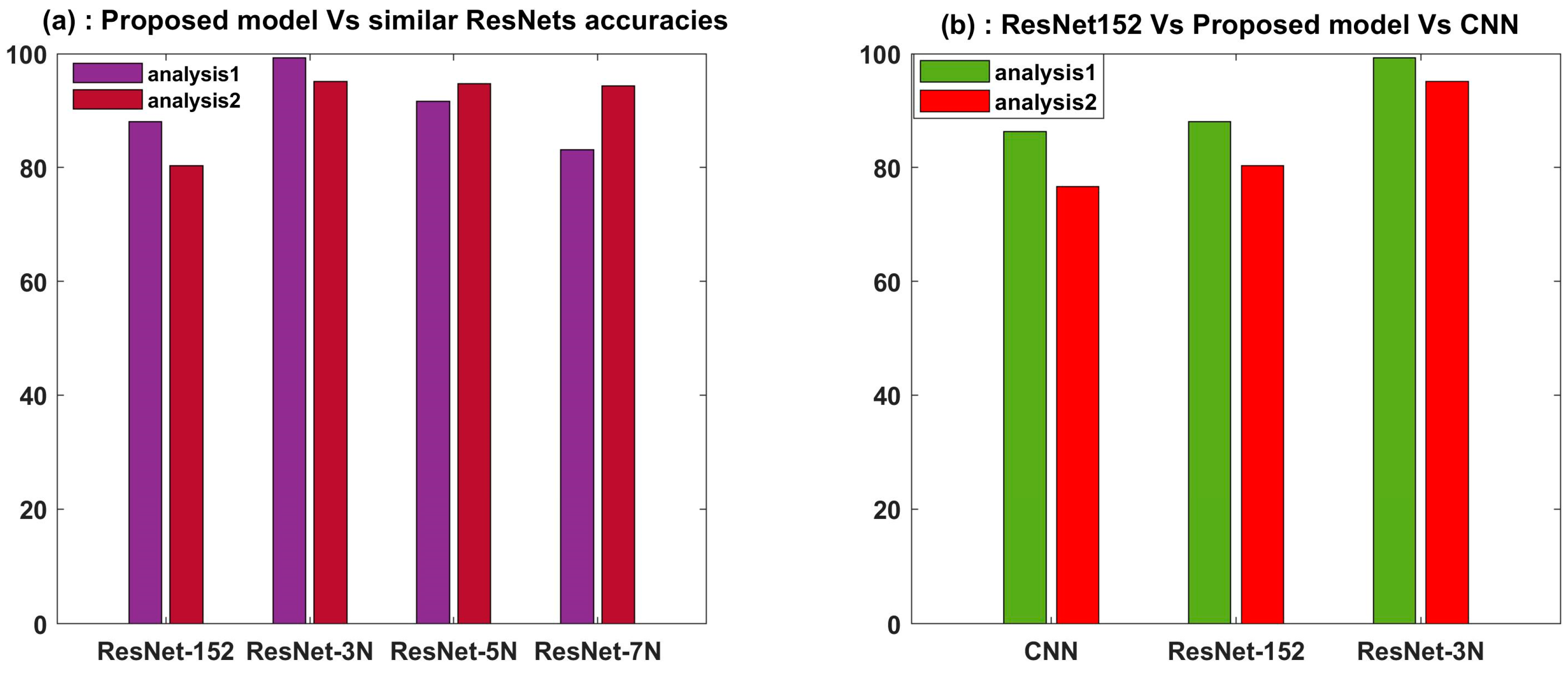
- A new deep learning approach is developed for improved accuracy of binary and multiclass classification. Our model’s basic architecture is derived from ResNet and CNN, and the developed model outperformed both algorithms. In addition, the results are compared with state-of-the-art ML algorithms, which shows the superiority of our algorithm. To the best of our knowledge, this is the first study for the development of this model.
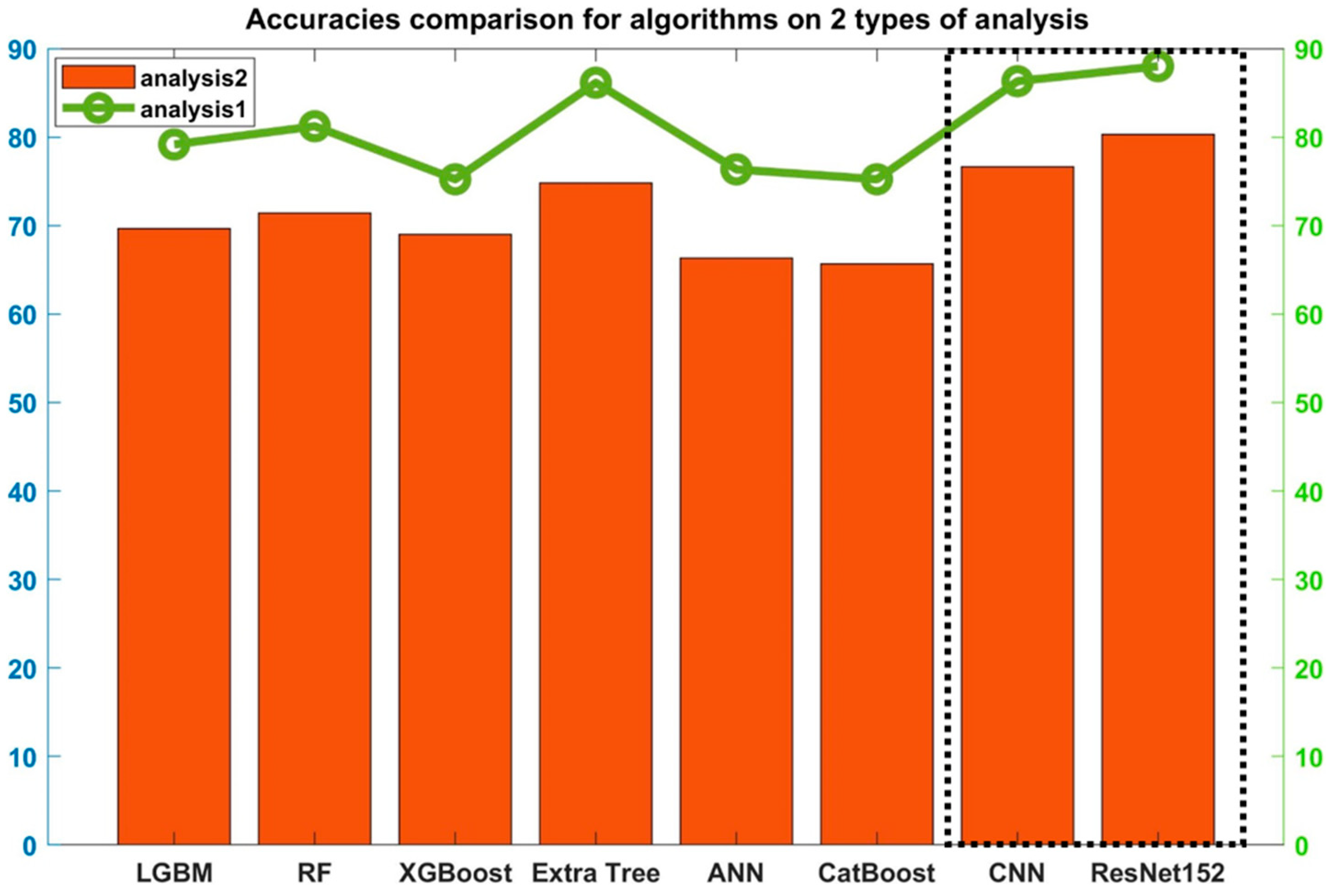
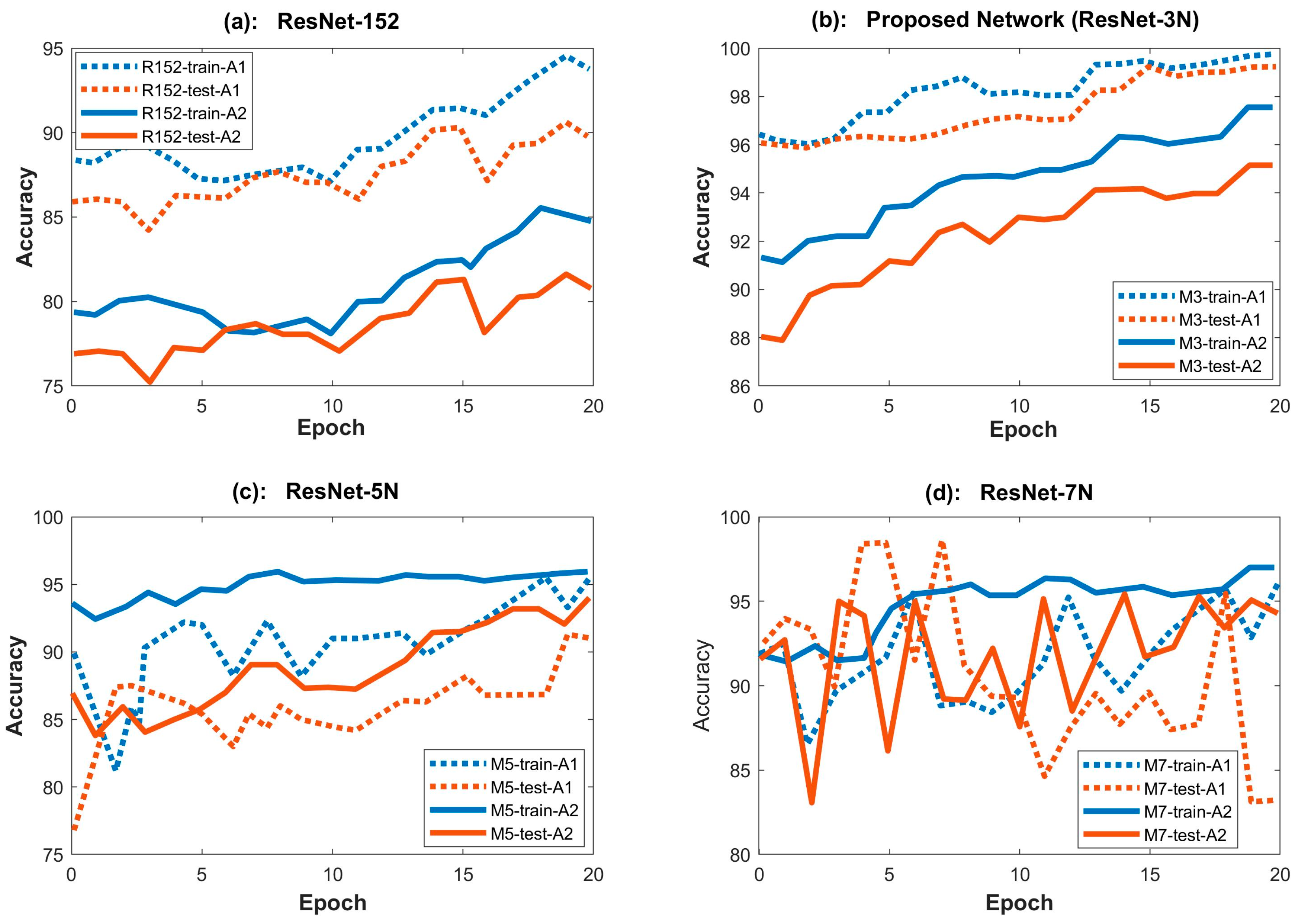
- A core dataset selection strategy is presented to speed up the training process by selecting fewer datasets for training. Among the four datasets for the unbalanced cases, only two were selected for training based on the statistical analysis by observing the standard deviations of the datasets. Two types of classifications were carried out. First, two-class classification for predicting balanced and unbalanced signals was performed (Analysis-1). Afterwards, in Analysis-2, a multiclass classification was performed to categorize the severity of rotor unbalance (refer to Table 1 for details). Analysis-2 is useful to predict the severity of the imbalance in the rotor (divided into four different classes).
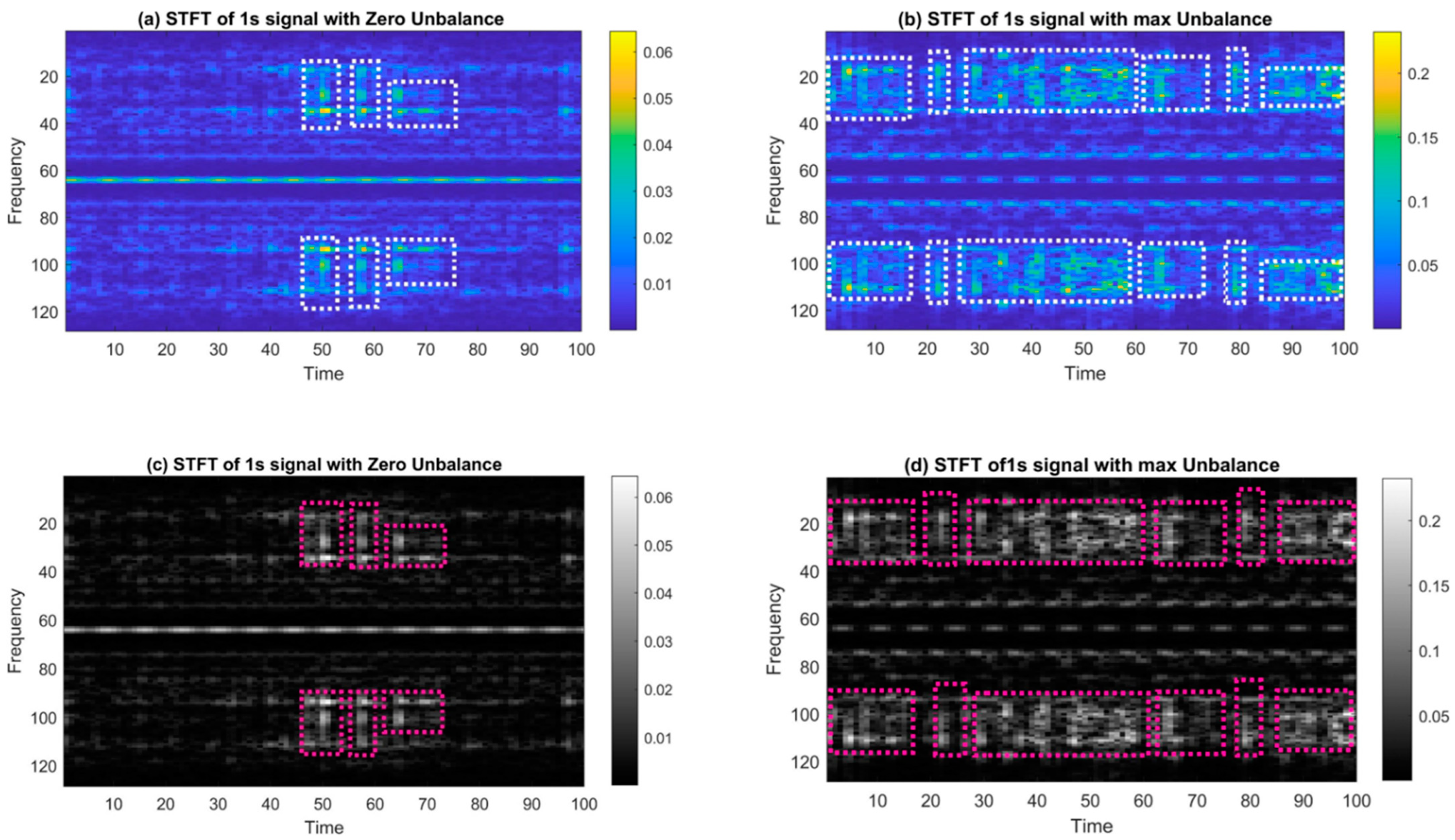
- It demonstrates the feasibility of using the STFT feature map for better training, in contrast to conventional FFT as the main feature of data.
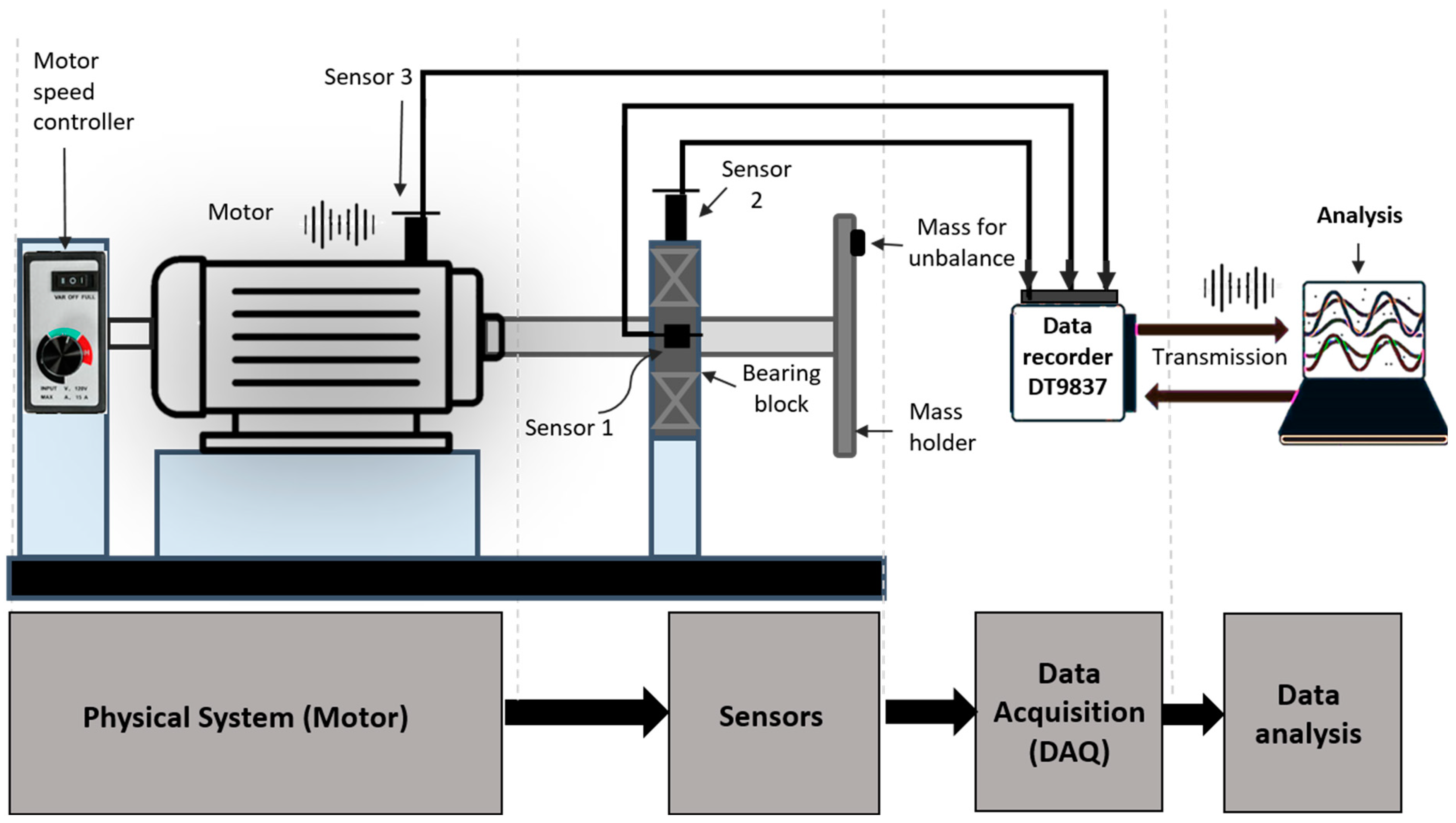
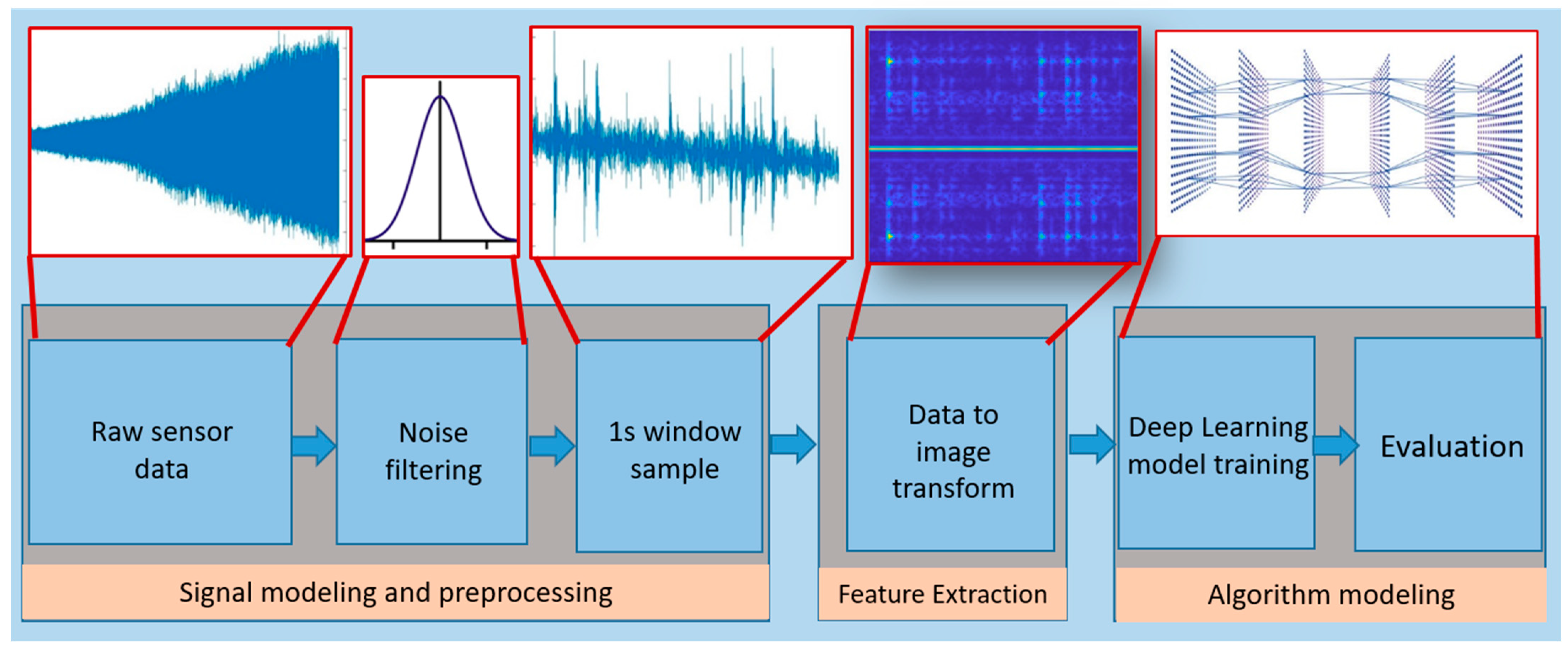
2. System Overview
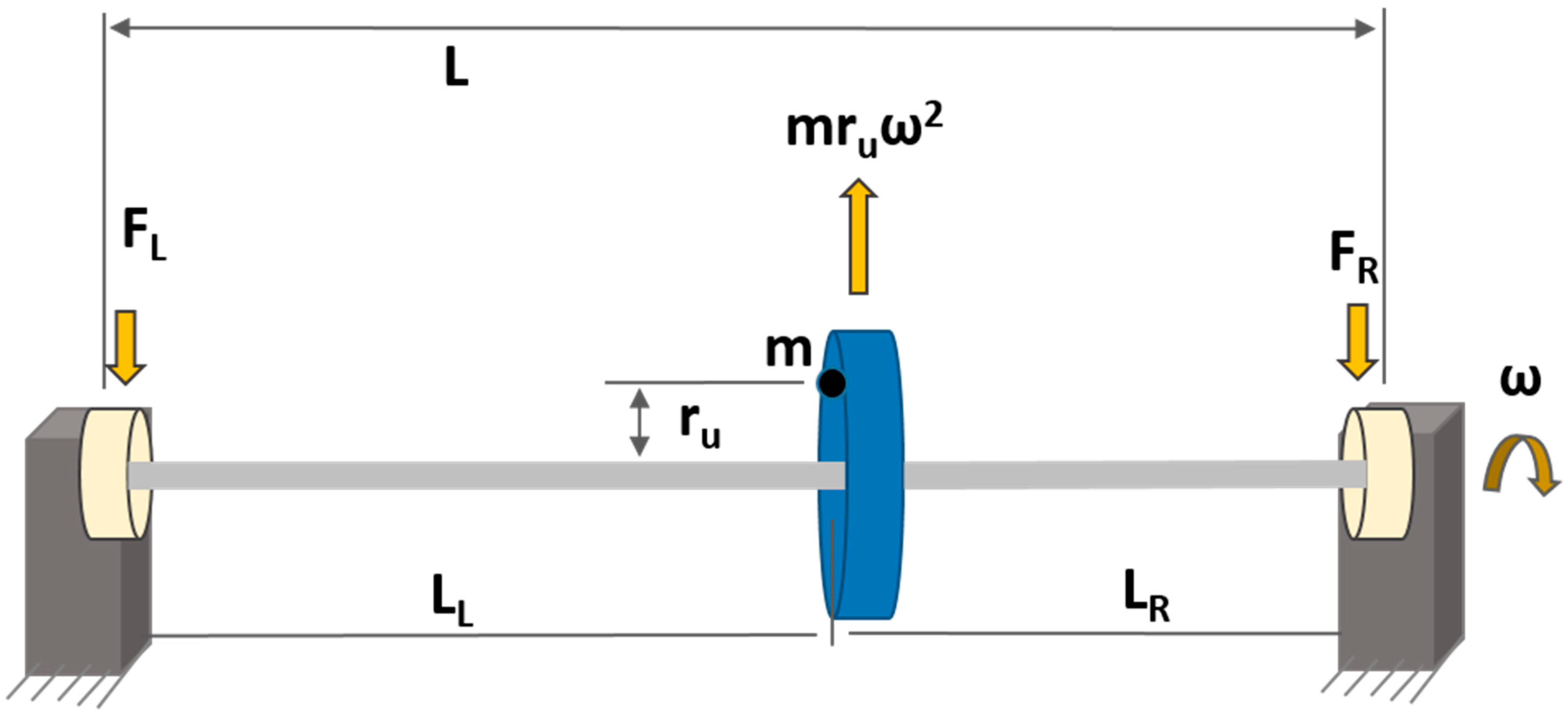
Imbalance in Rotary Machines
3. Methodology
3.1. System Parameters
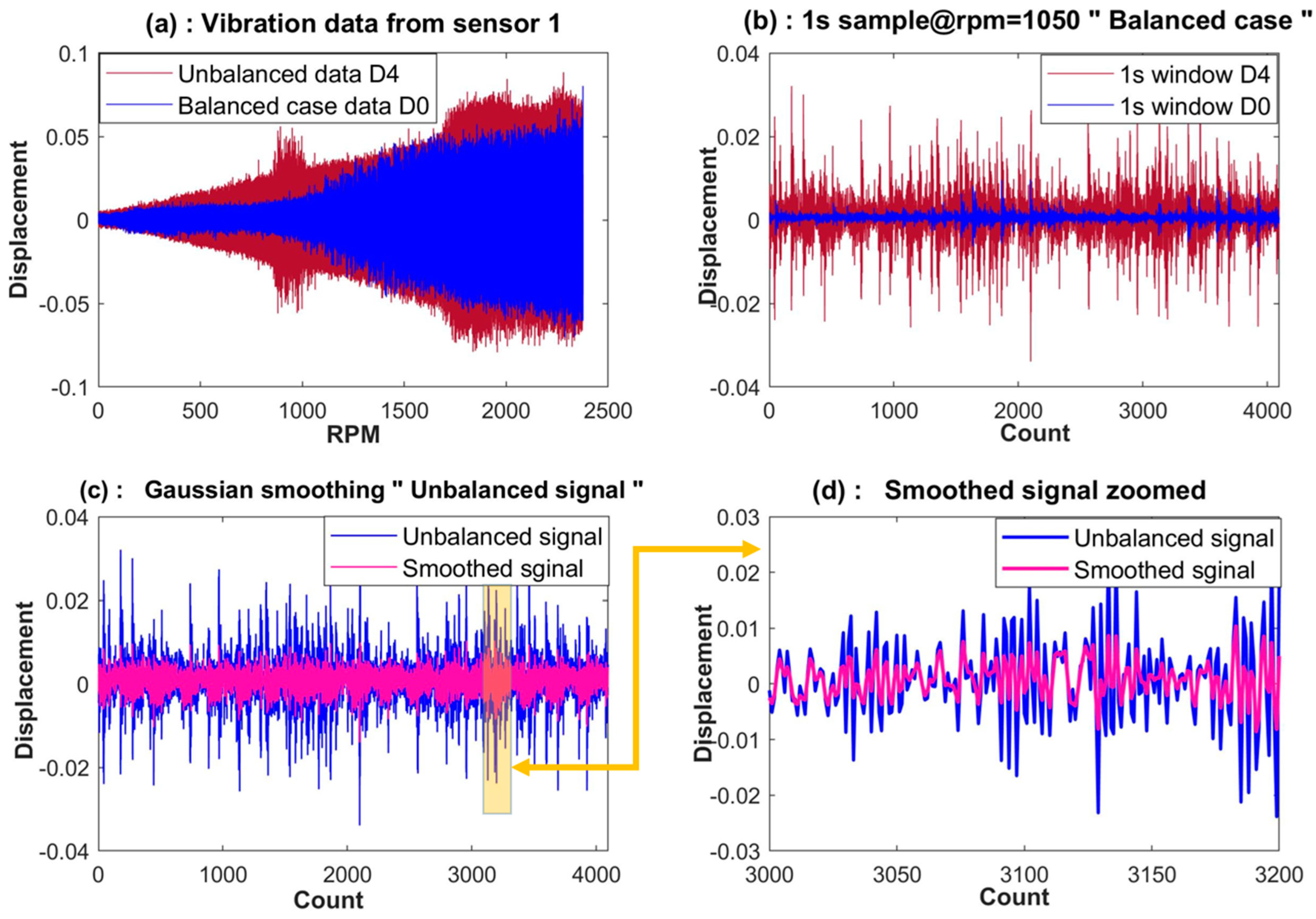
3.2. Data Selection and Preprocessing
3.3. Feature Extraction
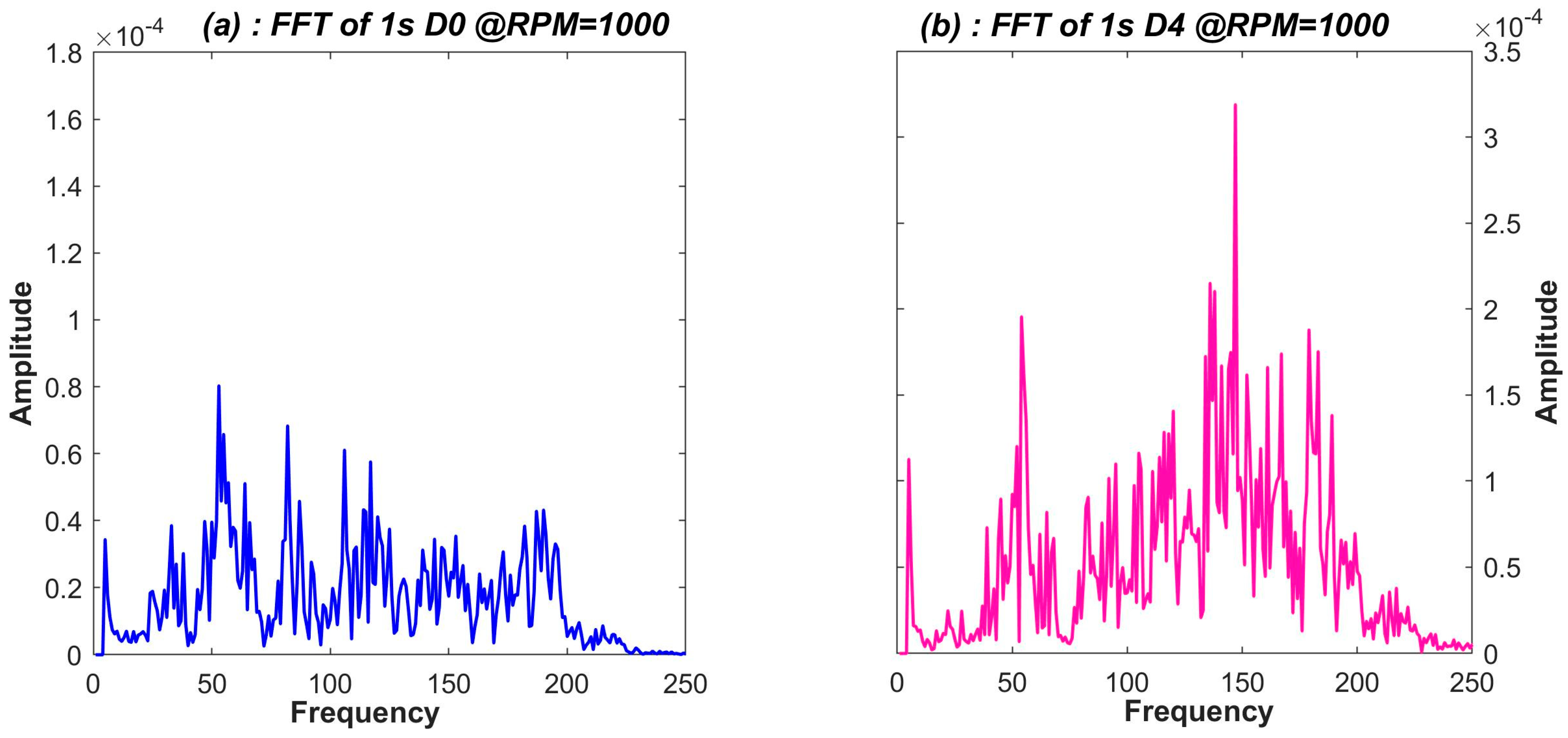
3.3.1. Fast Fourier Transform
3.3.2. Short-Time Fourier Transform
3.4. Classification Models
3.4.1. Artificial Neural Network
3.4.2. Random Forest
3.4.3. Xtreme Gradient Boost
3.4.4. Convolutional Neural Network
3.4.5. ResNet-152
4. Proposed Framework
5. Results
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Malla, C.; Panigrahi, I. Review of Condition Monitoring of Rolling Element Bearing Using Vibration Analysis and Other Techniques. J. Vib. Eng. Technol. 2019, 7, 407–414. [Google Scholar] [CrossRef]
- Alzghoul, A.; Jarndal, A.; Alsyouf, I.; Bingamil, A.A.; Ali, M.A.; AlBaiti, S. On the Usefulness of Pre-processing Methods in Rotating Machines Faults Classification using Artificial Neural Network. J. Appl. Comput. Mech. 2021, 7, 254–261. [Google Scholar] [CrossRef]
- Saleem, M.A. Detection of Unbalance in Rotating Machines Using Shaft Deflection Measurement during Its Operation. IOSR J. Mech. Civ. Eng. 2012, 3, 8–20. [Google Scholar] [CrossRef]
- Kalkat, M.; Yıldırım, Ş.; Uzmay, I. Rotor Dynamics Analysis of Rotating Machine Systems Using Artificial Neural Networks. Int. J. Rotating Mach. 2003, 9, 255–262. [Google Scholar] [CrossRef]
- Tiboni, M.; Remino, C.; Bussola, R.; Amici, C. A Review on Vibration-Based Condition Monitoring of Rotating Machinery. Appl. Sci. 2022, 12, 972. [Google Scholar] [CrossRef]
- Vasić, M.; Stojanović, B.; Blagojević, M. Failure analysis of idler roller bearings in belt conveyors. Eng. Fail. Anal. 2020, 117, 104898. [Google Scholar] [CrossRef]
- Reddy, M.C.S.; Sekhar, A.S. Identification of unbalance and looseness in rotor bearing systems using neural networks. In Proceedings of the 15th National Conference on Machines and Mechanisms NaCoMM, Chennai, India, 1–2 December 2011; pp. 69–84. [Google Scholar]
- Paresh Girdhar, S.M. Practical Machinery Vibration Analysis and Predictive Maintenance; Elsevier: Amsterdam, The Netherlands, 2004; Volume 4. [Google Scholar]
- The Knowledge Engineering Company. Bearing Damage and Failure Analysis Contents; SKF: Gothenburg, Sweden, 2017. [Google Scholar]
- Lacey, S.J. The role of vibration monitoring in predictive maintenance Part 2: Some illustrative examples. Maint. Asset Manag. 2010, 25, 38–44. [Google Scholar]
- Bogue, R. Sensors for condition monitoring: A review of technologies and applications. Sens. Rev. 2013, 33, 295–299. [Google Scholar] [CrossRef]
- Zou, Y.; Tong, L.; Steven, G.P. Vibration-based model-dependent damage (delamination) identification and health monitoring for composite structures—A review. J. Sound Vib. 2000, 230, 357–378. [Google Scholar] [CrossRef]
- Gao, Z.; Cecati, C.; Ding, S.X. A Survey of Fault Diagnosis and Fault-Tolerant Techniques Part I: Fault Diagnosis with Model-Based and Signal-Based Approaches. IEEE Trans. Ind. Electron. 2015, 62, 3757–3767. [Google Scholar] [CrossRef]
- Sampaio, R.P.C.; Maia, N.M.M.; Silva, J.M.M. Damage detection using the frequency-response-function curvature method. J. Sound Vib. 1999, 226, 1029–1042. [Google Scholar] [CrossRef]
- Gawronski, W.; Sawicki, J.T. Structural Damage Detection Using Modal Norms. J. Sound Vib. 2000, 229, 194–198. [Google Scholar] [CrossRef]
- Chow, M.Y.; Sharpe, R.N.; Hung, J.C. On the Application and Design of Artificial Neural Networks for Motor Fault Detection—Part II. IEEE Trans. Ind. Electron. 1993, 40, 189–196. [Google Scholar] [CrossRef]
- Li, B.; Goddu, G.; Chow, M.Y. Detection of common motor bearing faults using frequency-domain vibration signals and a neural network based approach. In Proceedings of the 1998 American Control Conference. ACC (IEEE Cat. No.98CH36207), Philadelphia, PA, USA, 26 June 1998; Volume 4, pp. 2032–2036. [Google Scholar] [CrossRef]
- Rajakarunakaran, S.; Venkumar, P.; Devaraj, D.; Rao, K.S.P. Artificial neural network approach for fault detection in rotary system. Appl. Soft Comput. J. 2008, 8, 740–748. [Google Scholar] [CrossRef]
- Chen, C.H.; Shyu, R.J.; Ma, C.K. A new fault diagnosis method of rotating machinery. Shock Vib. 2008, 15, 585–598. [Google Scholar] [CrossRef]
- Sendhilkumar, S.; Mohanasundaram, N.; Senthilkumar, M.; Sivanandam, S.N. Elman Neural Network for Diagnosis of Unbalance in a Rotor-Bearing System. Int. J. Mech. Mechatron. Eng. 2016, 10, 613–617. [Google Scholar]
- Lu, W.; Liang, B.; Cheng, Y.; Meng, D.; Member, S.; Yang, J. DNN Based Domain Adaptation for Fault Diagnosis. IEEE Trans. Ind. Electron. 2017, 64, 2296–2305. [Google Scholar] [CrossRef]
- Tang, X.; Zhuang, L.; Cai, J.; Li, C. Multi-fault classification based on support vector machine trained by chaos particle swarm optimization. Knowl.-Based Syst. 2010, 23, 486–490. [Google Scholar] [CrossRef]
- Bordoloi, D.J.; Tiwari, R. Support vector machine based optimization of multi-fault classification of gears with evolutionary algorithms from time-frequency vibration data. Measurement 2014, 55, 1–14. [Google Scholar] [CrossRef]
- Attaran, B.; Ghanbarzadeh, A. Bearing fault detection based on maximum likelihood estimation and optimized ANN using the bees algorithm. J. Appl. Comput. Mech. 2015, 1, 35–43. [Google Scholar] [CrossRef]
- Fatima, S.; Guduri, B.; Mohanty, A.R.; Naikan, V.N.A. Transducer invariant multi-class fault classification in a rotor-bearing system using support vector machines. Measurement 2014, 58, 363–374. [Google Scholar] [CrossRef]
- Wu, S.D.; Wu, P.H.; Wu, C.W.; Ding, J.J.; Wang, C.C. Bearing fault diagnosis based on multiscale permutation entropy and support vector machine. Entropy 2012, 14, 1343–1356. [Google Scholar] [CrossRef]
- Shen, C.; Wang, D.; Kong, F.; Tse, P.W. Fault diagnosis of rotating machinery based on the statistical parameters of wavelet packet paving and a generic support vector regressive classifier. Measurement 2013, 46, 1551–1564. [Google Scholar] [CrossRef]
- Gaye, B.; Zhang, D.; Wulamu, A. Improvement of Support Vector Machine Algorithm in Big Data Background. Math. Probl. Eng. 2021, 2021, 5594899. [Google Scholar] [CrossRef]
- Rahman, M.M.; Uddin, M.N. Online Unbalanced Rotor Fault Detection of an IM Drive Based on Both Time and Frequency Domain Analyses. IEEE Trans. Ind. Appl. 2017, 53, 4087–4096. [Google Scholar] [CrossRef]
- Brandao, I.M.; da Costa, C. Fault Diagnosis of Rotary Machines Using Machine Learning. Eletrôn. Potência 2022, 27, 236–243. [Google Scholar] [CrossRef]
- Wang, L.H.; Zhao, X.P.; Wu, J.X.; Xie, Y.Y.; Zhang, Y.H. Motor Fault Diagnosis Based on Short-time Fourier Transform and Convolutional Neural Network. Chin. J. Mech. Eng. Engl. Ed. 2017, 30, 1357–1368. [Google Scholar] [CrossRef]
- Xu, Y.; Yan, X.; Feng, K.; Zhang, Y.; Zhao, X.; Sun, B.; Liu, Z. Global contextual multiscale fusion networks for machine health state identification under noisy and imbalanced conditions. Reliab. Eng. Syst. Saf. 2023, 231, 108972. [Google Scholar] [CrossRef]
- Zhao, X.; Yao, J.; Deng, W.; Jia, M.; Liu, Z. Normalized Conditional Variational Auto-Encoder with adaptive Focal loss for imbalanced fault diagnosis of Bearing-Rotor system. Mech. Syst. Signal Process. 2022, 170, 108826. [Google Scholar] [CrossRef]
- Sunal, C.E.; Dyo, V.; Velisavljevic, V. Review of Machine Learning Based Fault Detection for Centrifugal Pump Induction Motors. IEEE Access 2022, 10, 71344–71355. [Google Scholar] [CrossRef]
- Bejani, M.M.; Ghatee, M. Regularized Deep Networks in Intelligent Transportation Systems: A Taxonomy and a Case Study. arXiv 2019, arXiv:1911.03010. [Google Scholar]
- Pasupa, K.; Sunhem, W. A comparison between shallow and deep architecture classifiers on small dataset. In Proceedings of the 2016 8th International Conference on Information Technology and Electrical Engineering (ICITEE), Yogyakarta, Indonesia, 5–6 October 2016. [Google Scholar] [CrossRef]
- Hassan, O.E.; Amer, M.; Abdelsalam, A.K.; Williams, B.W. Induction motor broken rotor bar fault detection techniques based on fault signature analysis—A review. IET Electr. Power Appl. 2018, 12, 895–907. [Google Scholar] [CrossRef]
- Valtierra-Rodriguez, M.; Rivera-Guillen, J.R.; Basurto-Hurtado, J.A.; Jesus De-Santiago-Perez, J.; Granados-Lieberman, D.; Amezquita-Sanchez, J.P. Convolutional neural network and motor current signature analysis during the transient state for detection of broken rotor bars in induction motors. Sensors 2020, 20, 3721. [Google Scholar] [CrossRef]
- Benkedjouh, T.; Zerhouni, N.; Rechak, S. Deep Learning for Fault Diagnosis based on short-time Fourier transform. In Proceedings of the 2018 International Conference on Smart Communications in Network Technologies (SaCoNeT), El Oued, Algeria, 27–31 October 2018; pp. 288–293. [Google Scholar] [CrossRef]
- He, M.; He, D.; Bechhoefer, E. Using deep learning based approaches for bearing fault diagnosis with AE sensors. In Proceedings of the Annual Conference of the PHM Society, Colorado, CO, USA, 3–6 October 2016; pp. 282–291. [Google Scholar]
- Sapena-Baño, A.; Pineda-Sanchez, M.; Puche-Panadero, R.; Martinez-Roman, J.; Kanović, Ž. Low-Cost Diagnosis of Rotor Asymmetries in Induction Machines Working at a Very Low Slip Using the Reduced Envelope of the Stator Current. IEEE Trans. Energy Convers. 2015, 30, 1409–1419. [Google Scholar] [CrossRef]
- Mey, O.; Neudeck, W.; Schneider, A.; Enge-Rosenblatt, O. Machine Learning-Based Unbalance Detection of a Rotating Shaft Using Vibration Data. IEEE Int. Conf. Emerg. Technol. Fact. Autom. ETFA 2020, 1, 1610–1617. [Google Scholar] [CrossRef]
- Shortle, J.F.; Mendel, M.B. Predicting dynamic imbalance in rotors. Probabilistic Eng. Mech. 1996, 11, 31–35. [Google Scholar] [CrossRef]
- MacCamhaoil, M. Static and Dynamic Balancing of Rigid Rotors. p. 2. Naerum, Denmark,1989. Available online: https://www.bksv.com/media/doc/bo0276.pdf (accessed on 9 August 2023).
- ANTRIEBE/DRIVES K AT A L O G/C AT A L O G. Edition 25, WEG, Germany. Available online: https://pdf.directindustry.com/pdf/weg-antriebe/antriebe-drives/12376-993229.html (accessed on 9 August 2023).
- Patil, A.A.; Desai, S.S.; Patil, L.N.; Patil, S.A. Adopting Artificial Neural Network for Wear Investigation of Ball Bearing Materials Under Pure Sliding Condition. Appl. Eng. Lett. 2022, 7, 81–88. [Google Scholar] [CrossRef]
- Samanta, B.; Al-Balushi, K.R.; Al-Araimi, S.A. Bearing Fault Detection Using ANN and Genetic Algorithm. EURASIP J. Appl. Signal Process. 2004, 2004, 785672. [Google Scholar] [CrossRef]
- Waleed, M.; Um, T.W.; Kamal, T.; Usman, S.M. Classification of agriculture farm machinery using machine learning and internet of things. Symmetry 2021, 13, 403. [Google Scholar] [CrossRef]
- Liang, Z.; Zhang, L.; Wang, X. A Novel Intelligent Method for Fault Diagnosis of Steam Turbines Based on T-SNE and XGBoost. Algorithms 2023, 16, 98. [Google Scholar] [CrossRef]
- Gu, K.; Wang, J.; Qian, H.; Su, X. Study on Intelligent Diagnosis of Rotor Fault Causes with the PSO-XGBoost Algorithm. Math. Probl. Eng. 2021, 2021, 9963146. [Google Scholar] [CrossRef]
- Lecun, Y.; Bengio, Y.; Hinton, G. Deep learning. Nature 2015, 521, 436–444. [Google Scholar] [CrossRef] [PubMed]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Training Dataset | Evaluation Dataset | Attached Mass (g) | Radius (mm) | Unbalance Factor (mmg) | Analysis-1 | Analysis-2 |
|---|---|---|---|---|---|---|
| Class (Total 2) | Class (Total 5) | |||||
| D0 | E0 | 0 | 0 | 0 | Balanced (B) | Balanced (B) |
| D1 | E1 | 3.281 ± 0.003 | 14 ± 0.1 | 45.9 ± 1.4 | Unbalanced (U) | Unbalanced-1 (U1) |
| D2 | E2 | 3.281 ± 0.003 | 18.5 ± 0.1 | 60.7 ± 1.9 | Unbalanced-2 (U2) | |
| D3 | E3 | 3.281 ± 0.003 | 23 ± 0.1 | 75.5 ± 2.3 | Unbalanced-3 (U3) | |
| D4 | E4 | 6.661 ± 0.007 | 23 ± 0.1 | 152.1 ± 2.3 | Unbalanced-4 (U4) |
| Training Dataset | Minimum | Maximum | Mean | Std. Deviation |
|---|---|---|---|---|
| D0 | −0.10675 | 0.101037 | 0.000664 | 0.00838 |
| D1 | −0.09483 | 0.084269 | 0.000715 | 0.007499 |
| D2 | −0.11995 | 0.118957 | 0.000571 | 0.010673 |
| D3 | −0.1188 | 0.127205 | 0.000689 | 0.010989 |
| D4 | −0.12719 | 0.125183 | 0.000684 | 0.013755 |
| Epoch | Resize | Folds | Patience | Mode | Optimizer | Rate | Beta_1 | Beta_2 | Activation Function | |
|---|---|---|---|---|---|---|---|---|---|---|
| For 2 Class | For 5 Class | |||||||||
| 20 | 224,224,3 | 5 | 10 | max | Adam | 0.0001 | 0.9 | 0.999 | Sigmoid | Softmax |
| Model | Accuracy | F1-Score | ||
|---|---|---|---|---|
| Analysis-1 | Analysis-2 | Analysis-1 | Analysis-2 | |
| ResNet-152 | 88.01 | 80.31 | 0.8809 | 0.8405 |
| ResNet-152-3N | 98.71 | 94.15 | 0.9759 | 0.958 |
| ResNet-152-5N | 91.59 | 94.73 | 0.742 | 0.8847 |
| ResNet-152-7N | 83.2 | 94.540 | 0.845 | 0.910 |
| CNN | ResNet-152 | Proposed Model (ResNet-3N) | ||||
|---|---|---|---|---|---|---|
| Analysis-1 | Analysis-2 | Analysis-1 | Analysis-2 | Analysis-1 | Analysis-2 | |
| Accuracy | 86.31 | 76.65 | 88.01 | 80.31 | 99.23 | 95.15 |
| Percent increase (%) | 12.92 | 18.5 | 11.22 | 14.84 | n/a | n/a |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wisal, M.; Oh, K.-Y. A New Deep Learning Framework for Imbalance Detection of a Rotating Shaft. Sensors 2023, 23, 7141. https://doi.org/10.3390/s23167141
Wisal M, Oh K-Y. A New Deep Learning Framework for Imbalance Detection of a Rotating Shaft. Sensors. 2023; 23(16):7141. https://doi.org/10.3390/s23167141
Chicago/Turabian StyleWisal, Muhammad, and Ki-Yong Oh. 2023. "A New Deep Learning Framework for Imbalance Detection of a Rotating Shaft" Sensors 23, no. 16: 7141. https://doi.org/10.3390/s23167141
APA StyleWisal, M., & Oh, K.-Y. (2023). A New Deep Learning Framework for Imbalance Detection of a Rotating Shaft. Sensors, 23(16), 7141. https://doi.org/10.3390/s23167141