



Fingerprint Systems: Sensors, Image Acquisition, Interoperability and Challenges


Abstract
1. Introduction
2. Sensors
2.1. Optical Sensing
2.2. Capacitive Sensing
2.3. UltraSonic Sensing
2.4. Pressure Sensing
2.5. Temperature Differential Sensing

2.6. Optical Coherence Tomography (OCT) Sensing
2.7. Radio Frequency Sensing
3. Image Acquisition
3.1. Rolled and Plain Fingerprints
3.2. Latent Fingerprints
3.3. Partial Prints
- Small area limits the feature pointsThe size of the scanners used for partial prints is only 12.7 × 16.0 mm [107]. The study proves that decreasing the active area limits the feature points acquired from fingerprint capture region and decreases the performance gradually [108]. Therefore, the fingerprint recognition methods significantly degrade, which urges the use of intelligent portable devices, especially for wearable devices.
- Fingerprint image qualitySince the quality is an important concept in fingerprint recognition, low-quality images are even worse in partial prints, as illustrated in Figure 10 and Figure 11. The practical issue is that when we focus on portability, then image quality is compromised, and therefore, there is a trade-off issue between these two qualities in partial fingerprints. The study in [109] shows that partial prints can have 3–15 minutiae within a small area, which is comparatively lower than in a large area. Because of the presence of or lack of minutiae or feature points due to the small print size and poor quality, specialized algorithms are required to extract pores and ridge contour features.
- Image capture conditionThere are several varying conditions such as humidity on skin and changes in lighting and temperature during image capture. Therefore, adopting a generalized algorithm for these varying conditions also can be a challenge, which urges the biometric industry to find alternative solutions.
- Geometric variationsGeometric variations and need for image pair alignment during the matching process are other factors which cause a negative impact on the partial-fingerprint-based recognition systems [110].
3.4. 2D Contactless Fingers

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference | Image Capture Mode | Features and Constraints |
|---|---|---|
| Genovese et al. [128] | Digital camera, green LED illumination | Level-3 features |
| Sankaran et al. [115] | Smart phone | Unconstrained images, manual image capture |
| Canrey et al. [121] | Smartphone | Slap hand, on-screen guidance for multi-finger image capture. |
| Deb et al. [129] | Smart phone | Two fingers such as index and thump fingers, two commercial apps on 3 smartphones |
| Birajadar et al. [130] | Smart phone | On-screen guidance |
| Kumar and Zhou [131] | Webcam | Low cost, no spatial illumination |
| Ravi et al. [118] | Webcam | Semi-mobile, fixed, auto-focus, noisy background |
| Weissenfeld et al. [132] | Prototypical hardware | Multi-finger capture |
| Kauba et al. [133] | Smart phone | Contact-contactless comparison |
| Jannis Priesnitz et al. [25] | Smart phone | Multi-finger capture |
| Attrish et al. [126] | Prototypic hardware-RaspberryPi No infra red | Single-finger photoMinutiae and CNN features |
| Akmal-Jahan et al. [2,120,122] | High-resolution Digital Camera | Two fingers: index and middle finger imagesMultiple finger segmentsRidge orientation pattern |
3.5. 3D Contactless Fingers
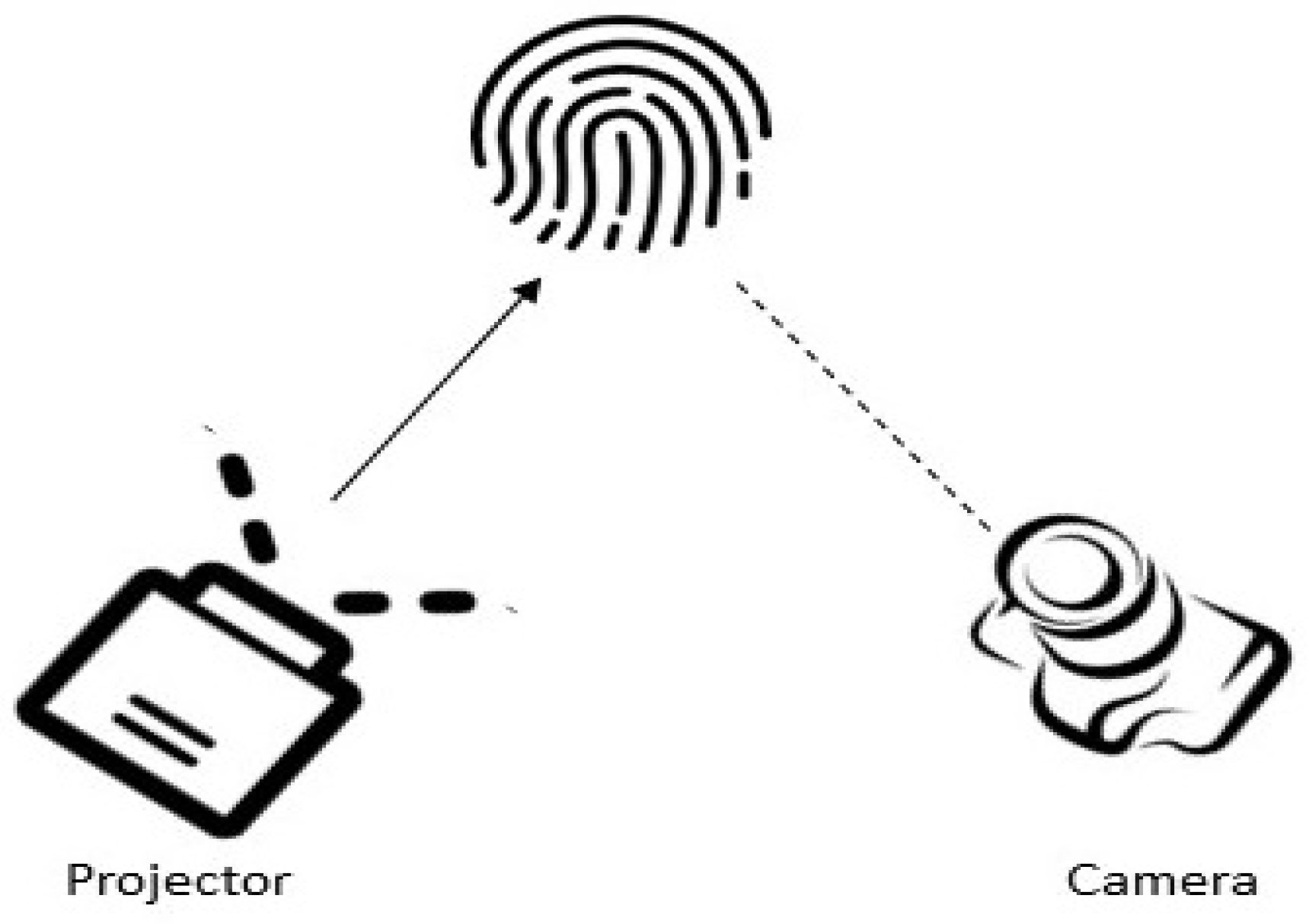
- Structured light scanningIn this approach, a set up with multiple cameras and a projector is arranged to capture 3D images. It is noted that multiple 2D images are acquired based on pattern illumination where 3D depth information is computed based on the triangulation using the point correspondences between images [137]. Even though this approach helps to obtain detailed and accurate ridge-valley and 3D depth information, it requires a complex and expensive hardware setup [138]. Figure 14 illustrates the basic setup of the structured light scanning.
- Photometric stereo techniquesIn this approach, many 2D images are acquired under the condition of various illumination from a constant viewpoint using a high-speed camera. The main principle behind this technique is that time of flight (ToF) and surface reflectance between fingerprint and light source are computed [139]. A setup with a camera and multiple LEDs is used in this approach, as illustrated in Figure 15. It is noted in the literature that photometric stereo is the widely adopted technique among all other 3D contactless approaches. The main advantage is the cost effectiveness of the setup. Further, it results in high-quality ridge details of the fingerprints [136,140,141]. Fingerprints are reconstructed when fixed illumination is given using 3D surface orientations. However, unconstrained finger movements are experienced in this strategy, which decreases the reconstruction precision of the fingerprint system.
- Stereo visionIn this approach, two or more cameras are used from different views to capture images [136,142,143]. 3D depth information is computed using the corresponding points based on the triangulation. This information is used to reconstruct the 3D images. This process has some advantages such as simplicity, affordability, and compact setup. However, existing approaches in the literature using this strategy have a drawback of long time consumption due to the additional computation of the correspondences between pixel points [10]. Figure 16 illustrates the basic setup of stereo vision scanning.
- Ultrasonic sensingUltrasonic imaging is one of the 3D contactless imaging techniques where acoustic pulse moves forward (transmitter to fingerprint) and backward (to receiver) directions [69,86]. There are several research using the ultrasonic finger image capture in the literature [31,32,33,69,70,76,86]. Acquiring high-resolution images is the significant advantage in ultrasonic sensing. However, large-volume hardware structures lessen the attraction compared to other 3D contactless strategies. It is noted that ultrasonic sensing-based 3D contactless imaging needs further investigations and directions in future.
- Optical Coherence Tomography (OCT)OCT is the latest, optical, non-destructive, non-invasive high-resolution method for 3D fingerprint image acquisition [92,93,94,95]. The fingerprint consists of epidermal and dermal layers to represent surface and internal regions of the fingerprint. Internal fingerprint surfaces are not sensitive to wet and worn conditions, and have anti-counterfeiting capacity compared with 2D finger images. Even so, it is challenging to extract features from both layers due to the noise and low contrast in contactless domains. To overcome this nature, the research group in [94] introduced a spectral domain-based OCT setup which helps to extract surface and internal features of the fingerprints effectively.It is obvious that the OCT opens up a new trend in image acquisition for fingerprint recognition as it has the capability to acquire in-depth information about the finger [93]. The principle behind the OCT is interferometry, where light reflected from both finger and reference mirror is merged using a detector. Spectral modulation helps to acquire depth information. The advantages of using OCT is that it extracts information from the finger up to 2 to 3 mm. Since it is invariant to skin damage and helps to reconstruct the finger, it is less vulnerable to spoof attacks as well.
| Authors and Year | 3D Imaging Strategy |
|---|---|
| 2018 [140] 2013 [141] | Photometric stereo |
| 2020 [144] 2019 [145] 2017 [146] | Structured light imaging |
| 2021 [3] 2015 [142] 2014 [147] | Active and passive stereo camera |
| 2020 [31] 2020 [32] 2017 [86] 2016 [33] 2015 [69] 2015 [70] | Ultrasonic sensing |
| 2022 [95] 2019 [92] 2020 [93] 2020 [94] | Optical coherence tomography (OCT) |
4. Cross-Matching and Interoperability
5. Challenges and Alternatives
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Weissenfeld, A.; Schmid, R.; Kohn, B.; Strobl, B.; Domínguez, G.F. Case study of the acquisition of contactless fingerprints in a real police setting. In Proceedings of the 2022 International Conference of the Biometrics Special Interest Group (BIOSIG), Darmstadt, Germany, 14–16 September 2022; pp. 1–5. [Google Scholar]
- Mohamed-Abdul-Cader, A.J.; Thanh, K.N.; Banks, J.; Chandran, V. HOS-FingerCode: Bispectral invariants based contactless multi-finger recognition system using ridge orientation and feature fusion. Expert Syst. Appl. 2022, 201, 117054. [Google Scholar] [CrossRef]
- Yin, X.; Zhu, Y.; Hu, J. 3D fingerprint recognition based on ridge-valley-guided 3D reconstruction and 3D topology polymer feature extraction. IEEE Trans. Pattern Anal. Mach. Intell. 2021, 43, 1085–1091. [Google Scholar] [CrossRef] [PubMed]
- Tan, H.; Kumar, A. Towards More Accurate Contactless Fingerprint Minutiae Extraction and Pose-Invariant Matching. IEEE Trans. Inf. Forensics Secur. 2020, 15, 3924–3937. [Google Scholar] [CrossRef]
- Takahashi, A.; Koda, Y.; Ito, K.; Aoki, T. Fingerprint Feature Extraction by Combining Texture, Minutiae, and Frequency Spectrum Using Multi-Task CNN. In Proceedings of the 2020 IEEE International Joint Conference on Biometrics (IJCB), Houston, TX, USA, 28 September–1 October 2020; pp. 1–8. [Google Scholar]
- Alam, N.A.; Ahsan, M.; Based, M.A.; Haider, J.; Kowalski, M. An intelligent system for automatic fingerprint identification using feature fusion by Gabor filter and deep learning. Comput. Electr. Eng. 2021, 10, 95. [Google Scholar]
- Alshehri, H.; Hussain, M.; Aboalsamh, H.A.; Emad-Ul-Haq, Q.; AlZuair, M.; Azmi, A.M. Alignment-Free Cross-Sensor Fingerprint Matching Based on the Co-Occurrence of Ridge Orientations and Gabor-HoG Descriptor. IEEE Access 2019, 7, 86436–86452. [Google Scholar] [CrossRef]
- Jawade, B.; Agarwal, A.; Setlur, S.; Ratha, N. Multi Loss Fusion For Matching Smartphone Captured Contactless Finger Images. In Proceedings of the 2021 IEEE International Workshop on Information Forensics and Security (WIFS), Montpellier, France, 7–10 December 2021; pp. 1–6. [Google Scholar]
- Smith, M.; Miller, S. Biometric Identification, Law and Ethics; Springer: Cham, Switzerland, 2021. [Google Scholar]
- Sero, D.; Garachon, I.; Hermens, E.; Liere, R.V.; Batenburg, K.J. The study of three-dimensional fingerprint recognition in cultural heritage: Trends and challenges. J. Comput. Cult. Herit. 2021, 14, 1–20. [Google Scholar] [CrossRef]
- Zhang, Y.; Wu, Y.; Gao, M.; Pan, S.; Shao, Z.; Luo, T. BlockRFC: Real-Time Rolled Fingerprint Construction and Distortion Rectification. IEEE Access 2020, 8, 216948–216959. [Google Scholar] [CrossRef]
- Orandi, S.; Watson, C.; Libert, J.M.; Fiumara, G.P. Contactless Fingerprint Capture and Data Interchange Best Practice Recommendation; NIST Special Publication; U.S. Department of Commerce: Washington, DC, USA, 2021; pp. 334–500. [Google Scholar]
- Castillo-Rosado, K.; Hernández-Palancar, J. Rolled-Plain Fingerprint Images Classification. In Progress in Pattern Recognition, Image Analysis, Computer Vision, and Applications, CIARP 2014; Bayro-Corrochano, E., Hancock, E., Eds.; Lecture Notes in Computer Science; Springer: Cham, Switzerland, 2014; Volume 8827. [Google Scholar]
- Chen, S.; Guo, Z.; Li, X.; Yang, D. Query2Set: Single-to-Multiple Partial Fingerprint Recognition Based on Attention Mechanism. IEEE Trans. Inf. Forensics Secur. 2022, 17, 1243–1253. [Google Scholar] [CrossRef]
- Hilles, S.M.S.; Lin, S. Adaptive Latent Fingerprint Image Segmentation and Matching using Chan-Vese Technique Based on EDTV Model. In Proceedings of the 2021 2nd International Conference on Smart Computing and Electronic Enterprise (ICSCEE), Cameron Highlands, Malaysia, 15–17 June 2021; pp. 2–7. [Google Scholar]
- McGuigan, M.; Christmas, J. Remote Extraction of Latent Fingerprints (RELF). In Proceedings of the 2020 International Joint Conference on Neural Networks (IJCNN), Glasgow, UK, 19–24 July 2020; pp. 1–8. [Google Scholar]
- Khan, A.I.; Wani, M.A. A common convolutional neural network model to classify plain, rolled and latent fingerprints. Int. J. Biom. 2019, 11, 257. [Google Scholar] [CrossRef]
- Bhilavade, M.B.; Patil, M.R.; Admuthe, L.S.; Shivaprakasha, K.S. Review on Implementation of Fingerprint Verification System Using Image Inpainting. In Lecture Notes in Electrical Engineering; Springer: Singapore, 2019; pp. 325–333. [Google Scholar]
- Walhazi, H.; Maalej, A.; Amara, N.E.B. Mask2LFP: Mask-constrained Adversarial Latent Fingerprint Synthesis. In Proceedings of the 2020 International Conference on Cyberworlds (CW), Caen, France, 9 September–1 October 2020; pp. 265–271. [Google Scholar]
- Walhazi, H.; Haddada, L.R.; Maalej, A.; Amara, N.E.B. Preprocessing Latent-Fingerprint Images For Improving Segmentation Using Morphological Snakes. In Proceedings of the 2020 5th International Conference on Advanced Technologies for Signal and Image Processing (ATSIP), Sousse, Tunisia, 2–5 September 2020; pp. 1–6. [Google Scholar]
- Venkatesh, S. Multi-spectral Finger based User Verification using Off-the-Shelf Deep Features. In Proceedings of the 2022 IEEE International Conference on Imaging Systems and Techniques (IST), Kaohsiung, Taiwan, 21–23 June 2022; pp. 1–6. [Google Scholar]
- Lin, C.; Kumar, A. Matching Contactless and Contact-Based Conventional Fingerprint Images for Biometrics Identification. IEEE Trans. Image Process. 2018, 27, 2008–2021. [Google Scholar] [CrossRef]
- Available online: https://aboutforensics.co.uk/latent-prints/ (accessed on 30 June 2023).
- Available online: https://www.thurrott.com/mobile/android/259369/google-issues-partial-fix-for-pixel-6-fingerprint-sensor-issues (accessed on 30 June 2023).
- Priesnitz, J.; Rathgeb, C.; Buchmann, N.; Busch, C.; Margraf, M. An overview of touchless 2D fingerprint recognition. J. Image Video Proc. 2021, 8, 2021. [Google Scholar] [CrossRef]
- Yin, X.; Zhu, Y.; Hu, J. A Survey on 2D and 3D Contactless Fingerprint Biometrics: A Taxonomy, Review, and Future Directions. IEEE Open J. Comput. Soc. 2021, 2, 370–381. [Google Scholar] [CrossRef]
- AlShehri, H.; Hussain, M.; AboAlSamh, H.; AlZuair, M. A Large-Scale Study of Fingerprint Matching Systems for Sensor Interoperability Problem. Sensors 2018, 18, 1008. [Google Scholar] [CrossRef] [PubMed]
- Qiu, L. Fingerprint sensor technology. In Proceedings of the 2014 9th IEEE Conference on Industrial Electronics and Applications, Hangzhou, China, 9–11 June 2014; pp. 1433–1436. [Google Scholar]
- Memon, S.; Sepasian, M.; Balachandran, W. Review of finger print sensing technologies. In Proceedings of the 2008 IEEE International Multitopic Conference, Karachi, Pakistan, 23–24 December 2008; pp. 226–231. [Google Scholar]
- Chowdhury, A.M.M.; Imtiaz, M.H. Contactless Fingerprint Recognition Using Deep Learning—A Systematic Review. J. Cybersecur. Priv. 2022, 2, 714–730. [Google Scholar] [CrossRef]
- Xu, C.; Lu, Y.; Strohmann, J.L.; Panchawagh, H. Large Area Multi-Functional Ultrasound Sensor: Fingerprint Touch Pressure Passive Stylus. In Proceedings of the 2020 IEEE International Ultrasonics Symposium (IUS), Las Vegas, NV, USA, 7–11 September 2020; pp. 1–3. [Google Scholar]
- Pradhan, N.; Gupta, R. 3D Ultrasonic Fingerprint Sensor. Int. J. Adv. Eng. Manag. IJAEM 2020, 2, 204–208. [Google Scholar]
- Tang, H.; Lu, Y.; Jiang, X.; Ng, E.J.; Tsai, J.M.; Horsley, D.A.; Boser, B.E. 3-D Ultrasonic Fingerprint Sensor-on-a-Chip. IEEE J. Solid-State Circuits 2016, 51, 2522–2533. [Google Scholar] [CrossRef]
- Iula, A. Ultrasound Systems for Biometric Recognition. Sensors 2019, 19, 2317. [Google Scholar] [CrossRef]
- Djordjev, K.D.; Fennell, L.E.; Buchan, N.I.; Burns, D.W.; Gupta, S.K.; Bae, S. Display with Peripherally Configured Ultrasonic Biometric Sensor. U.S. Patent US20140354596A1, 26 April 2016. [Google Scholar]
- Grosz, S.A.; Engelsma, J.J.; Liu, E. C2CL: Contact to Contactless Fingerprint Matching. IEEE Trans. Inf. Forensics Secur. 2021, 17, 2021. [Google Scholar] [CrossRef]
- Liu, J.-C.; Hsiung, Y.-S.; Lu, M.S.-C. A CMOS micromachined capacitive sensor array for fingerprint detection. IEEE Sens. J. 2012, 12, 1004–1010. [Google Scholar] [CrossRef]
- Available online: https://www.amazon.in/angxi-Optical-Fingerprint-Biometric-Scanner/dp/B08723ZXGY (accessed on 30 June 2023).
- Available online: https://www.amazon.com/SecuGen-Hamster-Optical-Fingerprint-Contactless/dp/B06XB16DG7 (accessed on 30 June 2023).
- Available online: https://identamaster.pro/shop/crossmatch-eikontouch-710-capacitive-fingerprint-scanner/ (accessed on 30 June 2023).
- Buchan, N.I.; Velez, M.F.; Tseng, C.J.; Panchawagh, H.V.; Sammoura, F.; Strohmann, J.L.; Djordjev, K.D.; Burns, D.W.; Fennell, L.E.; Aday, J.G. Fingerprint Sensor Device and Methods Thereof. U.S. Patent US20170364726A1, 21 December 2017. [Google Scholar]
- Hinger, A. Single Transducer Fingerprint System. U.S. Patent 20180046836, 15 February 2018. [Google Scholar]
- Strohmann, J.L.; Lu, Y.; Hinger, A.; Burns, D.W. Ultrasonic Biometric System with Harmonic Detection. U.S. Patent 15/804,902, 10 May 2018. [Google Scholar]
- Erhart, R.A. Integrated Fingerprint Sensor and Display. U.S. Patent 9336428, 10 May 2016. [Google Scholar]
- Jones, E.; Wickboldt, P.; Smith, P.; Lee, Y.S.; Jee, A.; Klenkler, R.A.; Mackey, B.L. Optical Fingerprint Sensor under a Display. U.S. Patent 20170220844, 3 August 2017. [Google Scholar]
- Benkley, F.G.; Geoffroy, D.J.; Satyan, P. Method and Apparatus for Fingerprint Image Reconstruction. U.S. Patent 8811688, 1 April 2012. [Google Scholar]
- Erhart, R.A.; Nelson, R.B.; Wickboldt, P. Fingerprint Sensor and Integratable Electronic Display. U.S. Patent 9274553, 1 March 2016. [Google Scholar]
- David, J.E.V.; Jiang, X.; Rubin, A.E.; Hershenson, M.; Miao, X. Fingerprint Sensors for Mobile Devices. U.S. Patent 20170308731, 11 July 2017. [Google Scholar]
- Ma, H.; Liu, Z.; Heo, S.; Lee, J.; Na, K.; Jin, H.B.; Jung, S.; Park, K.; Kim, J.J.; Bien, F. On-display transparent half-diamond pattern capacitive fingerprint sensor compatible with AMOLED display. IEEE Sens. J. 2016, 16, 8124–8131. [Google Scholar] [CrossRef]
- Choi, E.; Kim, S.; Park, K.; Bien, F.; Kim, H. Improved SNR, On-Chip Differentially Modulated TISM Signaling in HV DMOS Process for Mutual Capacitance Fingerprint Sensor. In Proceedings of the 2018 IEEE International Symposium on Circuits and Systems (ISCAS), Florence, Italy, 27–30 May 2018; pp. 1–4. [Google Scholar]
- Hwang, H.; Lee, H.; Han, M.; Kim, H.; Chae, Y. A 1.8-V 6.9-mW 120-fps 50-Channel Capacitive Touch Readout with Current Conveyor AFE and Current-Driven Δ∑ ADC. IEEE J. Solid State Circuits 2018, 53, 204–218. [Google Scholar] [CrossRef]
- Baek, Y.H. Robust optical fingerprint sensor to moisture fingerprints. In Proceedings of the 2016 International SoC Design Conference (ISOCC), Jeju, Republic of Korea, 23–26 October 2016; pp. 189–190. [Google Scholar]
- Available online: https://www.argustrueid.com/fingerprint-identification/ (accessed on 1 June 2023).
- Kim, S.J.; Lee, K.H.; Han, S.W.; Yoon, E. A CMOS Fingerprint System-on-a-Chip With Adaptable Pixel Networks and Column-Parallel Processors for Image Enhancement and Recognition. IEEE J. Solid-State Circuits 2008, 43, 2558–2567. [Google Scholar] [CrossRef]
- Zhou, H.; Chen, H.; Ma, R.; Li, X.; Du, X.; Zhang, M. Use of conductive Ti2O3 nanoparticles for optical and electrochemical imaging of latent fingerprints on various substrates. J. Electroanal. Chem. 2023, 936, 117387. [Google Scholar] [CrossRef]
- Yan, Y.-H.; Hung, C.-C.; Huang, C. Characteristic Comparison between Passive and Active Capacitive Fingerprint Sensors. In Proceedings of the 2020 IEEE International Conference on Consumer Electronics (ICCE-Taiwan), Taoyuan, Taiwan, 28–30 September 2020; pp. 1–2. [Google Scholar]
- Haw, H.; Wi, K.H. CMOS Capacitive Fingerprint Sensor Based on Differential Sensing Circuit with Noise Cancellation. Sensors 2018, 18, 2200. [Google Scholar]
- Kantarci, B.; Erol-Kantarci, M.; Schuckers, S. Towards secure cloud-centric internet of biometric things. In Proceedings of the 2015 IEEE 4th International Conference on Cloud Networking (CloudNet), Niagara Falls, ON, Canada, 5–7 October 2015; pp. 81–83. [Google Scholar]
- Shimamura, T.; Morimura, H.; Shigematsu, S.; Nakanishi, M.; Machida, K. Capacitive-Sensing Circuit Technique for Image Quality Improvement on Fingerprint Sensor LSIs. IEEE J. Solid State Circuits 2010, 45, 1080–1087. [Google Scholar] [CrossRef]
- Lee, J.-W.; Min, D.-J.; Kim, J.; Kim, W. A 600-dpi capacitive fingerprint sensor chip and image-synthesis technique. IEEE J. Solid State Circuits 1999, 34, 469–475. [Google Scholar]
- Tartagni, M.; Guerrieri, R. A fingerprint sensor based on the feedback capacitive sensing scheme. IEEE J. Solid State Circuits 1998, 33, 133–142. [Google Scholar] [CrossRef]
- Morimura, H.; Shigematsu, S.; Machida, K. A novel sensor cell architecture and sensing circuit scheme for capacitive fingerprint sensors. IEEE J. Solid State Circuits 2000, 35, 724–731. [Google Scholar] [CrossRef]
- Morimura, H.; Shigematsu, S.; Shimamura, T.; Machida, K.; Kyuragi, I. A pixel-level automatic calibration circuit scheme for sensing initialization of a capacitive fingerprint sensor LSI. In Proceedings of the 2001 Symposium on VLSI Circuits, Digest of Technical Papers, Kyoto, Japan, 14–16 June 2001; pp. 171–174. [Google Scholar]
- Jung, S.M.; Nam, J.M.; Yang, D.H.; Lee, M.K. A CMOS integrated capacitive fingerprint sensor with 32-bit RISC microcontroller. IEEE J. Solid State Circuits 2005, 40, 1745–1750. [Google Scholar] [CrossRef]
- Mohamed, M.G.A.; Cho, K.; Kim, H. Frequency Selection Concurrent Sensing Technique for High-Performance Touch Screens. J. Disp. Technol. 2016, 12, 1433–1443. [Google Scholar] [CrossRef]
- Mohamed, M.G.A.; Kim, H. Concurrent driving method with fast scan rate for large mutual capacitance touch screens. J. Sens. 2015, 2015, 268–293. [Google Scholar] [CrossRef]
- Song, K.H.; Choi, J.; Chun, J.H. A Method for Enhancing the Sensing Distance of a Fingerprint Sensor. Sensors 2017, 17, 2280. [Google Scholar] [CrossRef] [PubMed]
- Maltoni, D.; Maio, D.; Jain, A.; Prabhakar, S. Handbook of Fingerprint Recognition, 2nd ed.; Springer: Berlin/Heidelberg, Germany, 2009. [Google Scholar]
- Lu, Y.; Tang, H.; Fung, S.; Wang, Q.; Tsai, J.M.; Daneman, M. Ultrasonic fingerprint sensor using a piezoelectric micromachined ultrasonic transducer array integrated with complementary metal oxide semiconductor electronics. Appl. Phys. Lett. 2015, 106, 263503. [Google Scholar] [CrossRef]
- Horsley, D.A.; Rozen, O.; Lu, Y.; Shelton, S.; Guedes, A.; Przybyla, R. Piezoelectric micromachined ultrasonic transducers for human-machine interfaces and biometric sensing. In Proceedings of the 2015 IEEE SENSORS, Busan, Republic of Korea, 1–4 November 2015; pp. 1–4. [Google Scholar]
- Jiang, X.; Tang, H.Y.; Lu, Y.; Ng, E.J.; Tsai, J.M.; Boser, B.E.; Horsley, D.A. Ultrasonic fingerprint sensor with transmit beamforming based on a PMUT array bonded to CMOS circuitry. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2017, 64, 1401–1408. [Google Scholar] [CrossRef] [PubMed]
- Available online: https://electronicslovers.com/2020/01/fingerprint-scanners-types-its-working-in-smartphones.html (accessed on 25 June 2023).
- Savoia, A.; Caliano, G.; Iulat, A.; Longo, C.; Caronti, A.; Carotenuto, R.; Pappalardo, M. Design and fabrication of a cMUT probe for ultrasound imaging of fingerprints. In Proceedings of the IEEE International Ultrasonics Symposium, San Diego, CA, USA, 11–14 October 2010. [Google Scholar]
- Schneider, J.K.; Gojevic, S.M. Ultrasonic imaging systems for personal identification. In Proceedings of the IEEE Ultrasonics Symposium, Atlanta, GA, USA, 7–10 October 2001; Volume 1, pp. 595–601. [Google Scholar]
- Maeva, A.; Severin, F. High resolution ultrasonic method for 3D fingerprint recognizable characteristics in biometrics identification. In Proceedings of the IEEE Ultrasonics Symposium, Rome, Italy, 20–23 September 2009. [Google Scholar]
- Maeva, R.; Severin, F. High-speed biometrics ultrasonic system for 3D fingerprint imaging. In Proceedings of the International Society for Optical Engineering, Brussels, Belgium, 16–19 April 2012; Volume 8546. [Google Scholar]
- Baradarani, A.; Maeva, R.; Severin, F. Resonance based analysis of acoustic waves for 3D deep-layer fingerprint reconstruction. In Proceedings of the IEEE International Ultrasonics Symposium (IUS), Prague, Czech Republic, 21–25 July 2013; pp. 713–716. [Google Scholar]
- Chen, Y.Q.; Li, Y.X.; Chen, Y.; Ju, Z.Y.; Tao, L.Q.; Pang, Y.; Yang, Y.; Ren, T.L. Large-scale and high-density PMUT array based on isolated sol-gel PZT membranes for fingerprint imaging. J. Electrochem. Soc. 2017, 164, B377–B381. [Google Scholar] [CrossRef]
- Kwak, Y.S.; Choi, W.Y.; Park, K.K. Fingerprint Imaging Using Capacitive Micromachined Ultrasonic Transducer Impediography with Glass Waveguide. In Proceedings of the 2017 IEEE International Ultrasonics Symposium (IUS), Washington, DC, USA, 6–9 September 2017. [Google Scholar]
- Choi, W.; Kwak, Y.; Park, K. Fingerprint Imaging System Based on Capacitive Micromachined Ultrasonic Transducer by Using Impediography Method Including Direct Touch and Waveguide Methods. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2019, 66, 402–411. [Google Scholar] [CrossRef]
- Mao, S.; Przybyla, R. Circuit Design for a Prototype Ultrasound Fingerprint Sensor. In Proceedings of the Southern California Conference for Undergraduate Research, Camarillo, CA, USA, 17 November 2012. [Google Scholar]
- Lu, Y.; Tang, H.; Fung, S.; Boser, B.E.; Horsley, D.A. Short-range and high-resolution ultrasound imaging using an 8 MHz Aluminum Nitride PMUT array. In Proceedings of the 2015 28th IEEE International Conference on Micro Electro Mechanical Systems (MEMS), 18–22 January 2015; pp. 140–143. [Google Scholar]
- Tang, H.; Lu, Y.; Fung, S.; Tsai, J.; Daneman, M.; Horsley, D.; Boser, B. Pulse-echo ultrasonic fingerprint sensor on a chip. In Proceedings of the 2015 18th International Conference on Solid-State Sensors, Actuators and Microsystems (TRANSDUCERS 2015), Anchorage, AK, USA, 21–25 June 2015; pp. 674–677. [Google Scholar]
- Jiang, X.; Tang, H.Y.; Lu, Y.; Li, X.; Tsai, J.; Ng, E.; Daneman, M.; Lim, M.; Assaderaghi, F.; Boser, B. Monolithic 591 × 438 DPI ultrasonic fingerprint sensor. In Proceedings of the IEEE International Conference on Micro Electro Mechanical Systems (MEMS), Shanghai, China, 24–28 January 2016; pp. 107–110. [Google Scholar]
- Jiang, X.; Tang, H.Y.; Lu, Y.; Ng, E.; Tsai, J.; Daneman, M.; Boser, B.; Horsley, D. Inter-element coupling effects in pulse-echo ultrasonic fingerprint sensors. In Proceedings of the IEEE International Conference on Micro Electro Mechanical Systems (MEMS), Las Vegas, NV, USA, 22–26 January 2017; pp. 1192–1195. [Google Scholar]
- Jiang, X.; Lu, Y.; Tang, H.Y.; Tsai, J.; Ng, E.; Daneman, M.; Horsley, D.; Boser, B. Monolithic ultrasound fingerprint sensor. Microsyst. Nanoeng. 2017, 3, 17059. [Google Scholar] [CrossRef]
- Horsley, D.; Lu, Y.; Tang, H.Y.; Jiang, X.; Boser, B.; Tsai, J.; Ng, E.; Daneman, M. Ultrasonic fingerprint sensor based on a PMUT array bonded to CMOS circuitry. In Proceedings of the IEEE International Ultrasonics Symposium (IUS), Tours, France, 18–21 September 2016. [Google Scholar]
- Park, H.; Roh, Y. Design of ultrasonic fingerprint sensor made of 1–3 piezocomposites by finite element method. Jpn. J. Appl. Phys. 2017, 56, 07JD06. [Google Scholar] [CrossRef]
- Al-alem, F.; Alsmirat, M.A.; Al-Ayyoub, M. On the road to the Internet of Biometric Things: A survey of fingerprint acquisition technologies and fingerprint databases. In Proceedings of the 2016 IEEE/ACS 13th International Conference of Computer Systems and Applications (AICCSA), Agadir, Morocco, 29 November–2 December 2016; pp. 1–6. [Google Scholar]
- Available online: https://biometrics.mainguet.org/types/fingerprint_sensors_physics_mechan.htm (accessed on 25 June 2023).
- Marciniak, T. Biometric Technologies Based on Optical Coherence Tomography. Sensors 2023, 23, 3753. [Google Scholar] [CrossRef]
- Chugh, T.; Jain, A.K. OCT fingerprints: Resilience to presentation attacks. arXiv 2019, arXiv:1908.00102. [Google Scholar]
- Liu, F.; Liu, G.; Zhao, Q.; Shen, L. Robust and high-security fingerprint recognition system using optical coherence tomography. Neurocomputing 2020, 402, 14–28. [Google Scholar] [CrossRef]
- Wang, H.; Yang, X.; Chen, P.; Ding, B.; Liang, R.; Liu, Y. Acquisition and extraction of surface and internal fingerprints from optical coherence tomography through 3D fully convolutional network. Optik 2020, 205, 164–176. [Google Scholar] [CrossRef]
- Kirfel, A.; Scheer, T.; Jung, N.; Busch, C. Robust Identification and Segmentation of the Outer Skin Layers in Volumetric Fingerprint Data. Sensors 2022, 22, 8229. [Google Scholar] [CrossRef]
- Memon, B.; Ahmed, S. Fingerprint Sensors: Liveness Detection Issue and Hardware based Solutions. Sens. Transducers 2012, 136, 35–49. [Google Scholar]
- Jang, K.-W.; Kim, K.-S.; Jeong, K.-H. Fully Integrated Ultrathin Camera for Contact Fingerprint Imaging. In Proceedings of the 2019 International Conference on Optical MEMS and Nanophotonics (OMN), Daejeon, Republic of Korea, 28 July–1 August 2019; pp. 10–11. [Google Scholar]
- Madhavi, K.; Sreenath, B. Rectification of distortion in single rolled fingerprint. In Proceedings of the 2016 International Conference on Circuits, Controls, Communications and Computing (I4C), Bangalore, India, 4–6 October 2016; pp. 1–4. [Google Scholar]
- He, Z.; Zhang, J.; Pang, L.; Liu, E. PFVNet: A Partial Fingerprint Verification Network Learned From Large Fingerprint Matching. IEEE Trans. Inf. Forensics Secur. 2022, 17, 2312. [Google Scholar] [CrossRef]
- Libert, J.; Grantham, J.; Bandini, B.; Wood, S.; Garris, M.; Ko, K.; Byers, F.; Watson, C. Guidance for Evaluating Contactless Fingerprint Acquisition Devices; NIST Special Publication 500-305; U.S. Department of Commerce: Washington, DC, USA, 2018. [Google Scholar]
- Peralta, D.; Galar, M.; Triguero, I.; Paternain, D.; Garcia, S.; Barrenechea, E.; Bentez, J.M.; Bustince, H.; Herrera, F. A survey on fingerprint minutiae-based local matching for verification and identification: Taxonomy and experimental evaluation. Inf. Sci. 2015, 15, 67–87. [Google Scholar] [CrossRef]
- Available online: https://mobiledevmemo.com/apple-to-adtech-fingerprinting-is-never-allowed/ (accessed on 25 June 2023).
- Available online: http://ivg.au.tsinghua.edu.cn/dataset/TDFD.php (accessed on 25 June 2023).
- Drahansky, M.; Dolezel, M.; Urbanek, J.; Brezinova, E.; Kim, T.H. Influence of skin diseases on fingerprint recognition. J. Biomed. Biotechnol. 2012, 2, 626148. [Google Scholar] [CrossRef]
- Jain, A.K.; Ross, A. Bridging the gap: From biometrics to forensics. Philos. Trans. R. Soc. 2015, 370, 1674. [Google Scholar] [CrossRef]
- Lee, W.; Cho, S.; Choi, H.; Kim, J. Partial fingerprint matching using minutiae and ridge shape features for small fingerprint scanners. Expert Syst. Appl. 2017, 87, 183–198. [Google Scholar] [CrossRef]
- Fernandez-Saavedra, B.; Sanchez-Reillo, R.; Ros-Gomez, R.; LiuJimenez, J. Small fingerprint scanners used in mobile devices: The impact on biometric performance. IET Biom. 2016, 5, 28–36. [Google Scholar] [CrossRef]
- Modi, S.; Mohan, A.; Senjaya, B. Fingerprint recognition performance evaluation for mobile ID applications. In Proceedings of the International Carnahan Conference on Security Technology (ICCST), San Jose, CA, USA, 5–8 October 2010; pp. 243–249. [Google Scholar]
- Zhang, Y.; Zhou, B.; Zhan, X.; Qiu, X.; Lu, T. Small-size fingerprint matching based on deep learning. J. Comput. Appl. 2017, 37, 3212. [Google Scholar]
- Zhao, Q.; Zhang, D.; Zhang, L.; Luo, N. High resolution partial fingerprint alignment using pore and valley descriptors. Pattern Recognit. 2010, 43, 1050–1061. [Google Scholar] [CrossRef]
- Merhav, N. False–Accept/False–Reject Trade–offs for Ensembles of Biometric Authentication Systems. In Proceedings of the 2019 IEEE International Symposium on Information Theory (ISIT), Paris, France, 7–12 July 2019; pp. 802–806. [Google Scholar]
- Joshi, I.; Utkarsh, A.; Singh, P.; Kalra, P. On restoration of degraded fingerprints. Multimed Tools Appl. 2022, 81, 35349–35377. [Google Scholar] [CrossRef]
- Lin, C.; Kumar, A. A CNN-based framework for comparison of contactless to contact-based fingerprints. IEEE Trans. Inf. Forensics Secur. 2019, 14, 662–676. [Google Scholar] [CrossRef]
- Yin, X.; Zhu, Y.; Hu, J. Contactless fingerprint recognition based on global minutiae topology and loose genetic algorithm. IEEE Trans. Inf. Forensics Secur. 2019, 15, 28–41. [Google Scholar] [CrossRef]
- Sankaran, A.; Malhotra, A.; Mittal, A.; Vatsa, M.; Singh, R. On smartphone camera based fingerphoto authentication. In Proceedings of the 2015 IEEE 7th International Conference on Biometrics Theory, Applications and Systems (BTAS), Arlington, VA, USA, 8–11 September September 2015; pp. 1–7. [Google Scholar]
- Malhotra, A.; Sankaran, A.; Mittal, A.; Vatsa, M.; Singh, R. Finger-photo authentication using smartphone camera captured under varying environmental conditions. In Human Recognition in Unconstrained Environments; Elsevier: Amsterdam, The Netherlands, 2017; pp. 119–144. [Google Scholar]
- Stein, C.; Nickel, C.; Busch, C. Fingerphoto recognition with smartphone cameras. In Proceedings of the 2012 BIOSIG-Proceedings of the International Conference of Biometrics Special Interest Group (BIOSIG), Darmstadt, Germany, 6–7 September 2012; pp. 1–12. [Google Scholar]
- Ravi, H.; Sivanath, S.K. A novel method for touch-less finger print authentication. In Proceedings of the International Conference on Technologies for Homeland Security (HST), Waltham, MA, USA, 12–14 November 2013; pp. 147–153. [Google Scholar]
- Kumar, A. Introduction to trends in fingerprint identification. In Contactless 3D Fingerprint Identification; Springer: Berlin/Heidelberg, Germany, 2018; pp. 1–15. [Google Scholar]
- Akmal-Jahan, M.; Nguyen, K.; Banks, J.; Chandran, V. Contactless Multiple Finger Segments based Identity Verification using Information Fusion from Higher Order Spectral Invariants. In Proceedings of the 2018 15th IEEE International Conference on Advanced Video and Signal Based Surveillance (AVSS), Auckland, New Zealand, 27–30 November 2018; pp. 1–6. [Google Scholar]
- Carney, L.A.; Kane, J.; Mather, J.F.; Othman, A.; Simpson, A.G.; Tavanai, A.; Tyson, R.A.; Xue, Y. A Multi-Finger Touchless Fingerprinting System: Mobile Fingerphoto and Legacy Database Interoperability; Association for Computing Machinery: New York, NY, USA, 2017; pp. 139–147. [Google Scholar]
- Akmal-Jahan, M.; Banks, J.; Tomeo-Reyes, I.; Chandran, V. Contactless Finger Recognition Using Invariants from Higher Order Spectra of Ridge Orientation Profiles. In Proceedings of the 2018 25th IEEE International Conference on Image Processing (ICIP), Athens, Greece, 7–10 October 2018; pp. 2012–2016. [Google Scholar]
- Li, G.; Yang, B.; Olsen, M.A.; Busch, C. Quality assessment for fingerprints collected by smartphone cameras. In Proceedings of the Conference on Computer Vision and Pattern Recognition Workshops (CVPRW), Portland, OR, USA, 23–28 June 2013; pp. 146–153. [Google Scholar]
- Raghavendra, R.; Busch, C.; Yang, B. Scaling-robust fingerprint verification with smartphone camera in real-life scenarios. In Proceedings of the Sixth International Conference on Biometrics: Theory, Applications and Systems (BTAS), Arlington, VA, USA, 29 September–2 October 2013; pp. 1–8. [Google Scholar]
- Tiwari, K.; Gupta, P. A touch-less fingerphoto recognition system for mobile hand-held devices. In Proceedings of the International Conference on Biometrics (ICB), Phuket, Thailand, 19–22 May 2015; pp. 151–156. [Google Scholar]
- Attrish, A.; Bharat, N.; Anand, V.; Kanhangad, V. A Contactless Fingerprint Recognition System. arXiv 2021, arXiv:2108.09048. [Google Scholar]
- Lin, C.; Kumar, A. Contactless and partial 3D fingerprint recognition using multi-view deep representation. Pattern Recognit. 2018, 83, 314–327. [Google Scholar] [CrossRef]
- Genovese, A.; Munoz, E.; Piuri, V.; Scotti, F.; Sforza, G. Towards touchless pore fingerprint biometrics: A neural approach. In Proceedings of the 2016 IEEE Congress on Evolutionary Computation (CEC), Vancouver, BC, Canada, 24–29 July 2016. [Google Scholar]
- Deb, D.; Chugh, T.; Engelsma, J.; Cao, K.; Nain, N.; Kendall, J.; Jain, A.K. Matching fingerphotos to slap fingerprint images. arXiv 2018, arXiv:1804.08122. [Google Scholar]
- Birajadar, P.; Haria, M.; Kulkarni, P.; Gupta, S.; Joshi, P.; Singh, B.; Gadre, V. Towards smartphone-based touchless fingerprint recognition. Sadhana 2019, 44, 161. [Google Scholar] [CrossRef]
- Kumar, A.; Zhou, Y. Contactless fingerprint identification using level zero features. In Proceedings of the Conference on Computer Vision and Pattern Recognition Workshops (CVPRW), Colorado Springs, CO, USA, 20–25 June 2011; pp. 114–119. [Google Scholar]
- Weissenfeld, A.; Strobl, B.; Daubner, F. Contactless finger and face capturing on a secure handheld embedded device. In Proceedings of the 2018 Design, Automation Test in Europe Conference Exhibition (DATE), Dresden, Germany, 19–23 March 2018; pp. 1321–1326. [Google Scholar]
- Kauba, C.; Söllinger, D.; Kirchgasser, S.; Weissenfeld, A.; Fernández, Domínguez, G.; Strobl, B.; Uhl, A. Towards Using Police Officers’ Business Smartphones for Contactless Fingerprint Acquisition and Enabling Fingerprint Comparison against Contact-Based Datasets. Sensors 2021, 21, 2248. [Google Scholar] [CrossRef]
- Zhang, Z.; Liu, S.; Liu, M. A multi-task fully deep convolutional neural network for contactless fingerprint minutiae extraction. Pattern Recognit. 2021, 120, 108–189. [Google Scholar] [CrossRef] [PubMed]
- Svoboda, J. Deep Learning for 3D Hand Biometric Systems; Università della Svizzera Italiana: Lugano, Switzerland, 2020. [Google Scholar]
- Xie, W.; Song, Z.; Chung, R.C. Real-time three-dimensional fingerprint acquisition via a new photometric stereo means. Opt. Eng. 2013, 52, 103103. [Google Scholar] [CrossRef]
- Salih, Y.; Malik, A.S. Depth and geometry from a single 2D image using triangulation. In Proceedings of the 2012 IEEE International Conference on Multimedia and Expo Workshops, Melbourne, Australia, 9–13 July 2012. [Google Scholar]
- Kumar, A. Contactless 3D Fingerprint Identification; Springer: Cham, Switzerland, 2018. [Google Scholar]
- Zhang, D.; Lu, G. 3D biometrics technologies and systems. In 3D Biometrics; Springer: New York, NY, USA, 2013; pp. 19–33. [Google Scholar]
- Lin, C.; Kumar, A. Tetrahedron based fast 3D fingerprint identification using colored LEDs illumination. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 40, 3022–3030. [Google Scholar] [CrossRef]
- Kumar, A.; Kwong, C. Towards contactless, low-cost and accurate 3d fingerprint identification. In Proceedings of the 2013 IEEE Conference on Computer Vision and Pattern Recognition, Portland, OR, USA, 23–28 June 2013; pp. 3438–3443. [Google Scholar]
- Labati, R.D.; Genovese, A.; Piuri, V.; Scotti, F. Toward unconstrained fingerprint recognition: A fully touchless 3-D system based on two views on the move. IEEE Trans. Syst. Man Cybern. Syst. 2015, 46, 202–219. [Google Scholar] [CrossRef]
- Liu, E.; Zhang, D.; Song, C.; Lu, T.G. Touchless multiview fingerprint acquisition and mosaicking. IEEE Trans. Instrum. Meas. 2013, 62, 2013. [Google Scholar] [CrossRef]
- Zhang, W.; Kosiorek, D.A.; Brodeur, A.N. Application of structured-light 3-D scanning to the documentation of plastic fingerprint impressions: A quality comparison with traditional photography. J. Forensic Sci. 2020, 65, 784–790. [Google Scholar] [CrossRef] [PubMed]
- Panetta, K.; Rajeev, S.; Kamath, K.M.S.; Agaian, S.S. Unrolling post-mortem 3D fingerprints using mosaicking pressure simulation technique. IEEE Access 2019, 7, 88174–88185. [Google Scholar] [CrossRef]
- Liu, F.; Liang, J.; Shen, L.; Yang, M.; Zhang, D.; Lai, Z. Case study of 3D fingerprints applications. PLoS ONE 2017, 12, e0175261. [Google Scholar] [CrossRef]
- Liu, F.; Zhang, D. 3D fingerprint reconstruction system using feature correspondences and prior estimated finger model. Pattern Recognit. 2014, 47, 178–193. [Google Scholar] [CrossRef]
- Jawade, B.; Mohan, D.D.; Setlur, S.; Ratha, N.; Govindaraju, V. RidgeBase: A Cross-Sensor Multi-Finger Contactless Fingerprint Dataset. In Proceedings of the 2022 IEEE International Joint Conference on Biometrics (IJCB), Abu Dhabi, United Arab Emirates, 10–13 October 2022; pp. 1–9. [Google Scholar]
- Berti, A.; Nasrabadi, N.; Dawson, J. Investigating the impact of demographic factors on contactless fingerprints interoperability. In Proceedings of the 2022 International Conference of the Biometrics Special Interest Group (BIOSIG), Darmstadt, Germany, 14–16 September 2022; pp. 1–5. [Google Scholar]
- Tan, H.; Kumar, A. Minutiae Attention Network with Reciprocal Distance Loss for Contactless to Contact-Based Fingerprint Identification. IEEE Trans. Inf. Forensics Secur. 2021, 16, 3299–3311. [Google Scholar] [CrossRef]
- Williams, B.; McCauley, J.; Dando, J.; Nasrabadi, N.; Dawson, J. Interoperability of Contact and Contactless Fingerprints Across Multiple Fingerprint Sensors. In Proceedings of the 2021 International Conference of the Biometrics Special Interest Group (BIOSIG), Darmstadt, Germany, 15–17 September 2021; pp. 1–7. [Google Scholar]
- Alshehri, H.; Hussain, M.; Aboalsamh, H.A.; Zuair, M.A.A. Cross-sensor fingerprint matching method based on orientation gradient and Gabor-Hog descriptors with score level fusion. IEEE Access 2018, 6, 28951–28968. [Google Scholar] [CrossRef]
- Wild, P.; Daubner, F.; Penz, H.; Domnguez, G.F. Comparative test of smartphone finger photo vs. touch-based cross-sensor fingerprint recognition. In Proceedings of the 2019 7th International Workshop on Biometrics and Forensics (IWBF), Cancun, Mexico, 2–3 May 2019; pp. 1–6. [Google Scholar]
- Dabouei, A.; Soleymani, S.; Dawson, J.; Nasrabadi, N.M. Deep contactless fingerprint unwarping. In Proceedings of the 2019 International Conference on Biometrics (ICB), Crete, Greece, 4–7 June 2019; pp. 1–8. [Google Scholar]
- Malhotra, A.; Sankaran, A.; Vatsa, M.; Singh, R. On matching finger-selfies using deep scattering networks. IEEE Trans. Biom. Behav. Identity Sci. 2020, 2, 350–362. [Google Scholar] [CrossRef]
- Pillai, A.; Mil’shtein, S. Can contactless fingerprints be compared to existing database? In Proceedings of the 2012 IEEE Conference on Technologies for Homeland Security (HST), Waltham, MA, USA, 13–15 November 2012; pp. 390–394. [Google Scholar]
- ISO/IEC 19794-4:2011; Information Technology–Biometric Data Interchange Formats–Part 4: Finger Image Data. International Organization for Standardization: Geneva, Switzerland, 2011; Volume 2011.
- Zhou, W.; Hu, J.; Petersen, I.; Wang, S.; Bennamoun, M. A benchmark 3d fingerprint database. In Proceedings of the 2014 11th International Conference on Fuzzy Systems and Knowledge Discovery (FSKD), Xiamen, China, 19–21 August 2014; pp. 935–940. [Google Scholar]
- Ericson, L.; Shine, S. Evalutaion of Contactless versus Contact Fingerprint Data Phase 2, version 1.1; Technol Report; DOJ Office Justice Programs; I. ManTech Advanced System International: Fairmont, WV, USA, 2015; p. 249552. [Google Scholar]
- Galbally, J.; Bostrom, G.; Beslay, L. Full 3d touchless fingerprint recognition: Sensor, database and baseline performance. In Proceedings of the International Joint Conference on Biometrics (IJCB), Denver, CO, USA, 1–4 October2017; pp. 225–233. [Google Scholar]
















| Mode of Acquisition | Related Issue |
|---|---|
| Contact acquisition | Ridge structure of the fingerprint in 3D form is eliminated while contacting with the surface. Insufficient and too much pressure can affect the ridge surface. |
| Flat Fingerprint Acquisition | Finger surface flattened against the surface of the sensor. Different forms and ranges of distortion may occur during the capture |
| Rolled Fingerprint Acquisition | 3D finger structure is converted into a 2D plane by rolling the finger. |
| Iinked Fingerprint Acquisition | The print impressed on the card is a representation of the ridge surface friction. The digital image acquired from the card by inked impression is a second-order representation of the ridge structure. Errors may occur when converting the inked impression to digital form via optical scanning. |
| Contactless Acquisition | Optical representation of an Illuminated finger surface is represented in optical where 3D structure is turned into a 2D plane. |
| Database and Year | Contactless Image Acquisition | Contact-Based Image Acquisition |
|---|---|---|
| 3D Fingerprint Database-2014 [158] | 3D Scanner | CROSSMATCH Verifier 300 LC2.0 |
| Man Tech-2015 [159] | iPhone 4 | Cross Match Guardian R2, |
| PolyU Contactless 2D- Contact 2D Database-2018, [22] | Low-cost camera | URU 4000 |
| Finger Photo and Slap Fingerprint Database-2018 [129] | Smartphone | CrossMatch Guardian 200, |
| Touchless and Touch-Based Fingerprint Database-2019 [130] | Smartphone | eNBioScan-C1(HFDU08) |
| ISPFDv2-2020 [155] | Smartphones | Secugen Hamster IV |
| Finger Photo and Touch-based Fingerprint Database-2021 [36] | Smartphones | URU 4500 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mohamed Abdul Cader, A.J.; Banks, J.; Chandran, V. Fingerprint Systems: Sensors, Image Acquisition, Interoperability and Challenges. Sensors 2023, 23, 6591. https://doi.org/10.3390/s23146591
Mohamed Abdul Cader AJ, Banks J, Chandran V. Fingerprint Systems: Sensors, Image Acquisition, Interoperability and Challenges. Sensors. 2023; 23(14):6591. https://doi.org/10.3390/s23146591
Chicago/Turabian StyleMohamed Abdul Cader, Akmal Jahan, Jasmine Banks, and Vinod Chandran. 2023. "Fingerprint Systems: Sensors, Image Acquisition, Interoperability and Challenges" Sensors 23, no. 14: 6591. https://doi.org/10.3390/s23146591
APA StyleMohamed Abdul Cader, A. J., Banks, J., & Chandran, V. (2023). Fingerprint Systems: Sensors, Image Acquisition, Interoperability and Challenges. Sensors, 23(14), 6591. https://doi.org/10.3390/s23146591