
Development and Analysis of Multi-Degree-of-Freedom Piezoelectric Actuator Based on Elephant Trunk Structure



Abstract
:1. Introduction
2. Structure and Working Principle of Elephant Trunk Motor with Multiple Degrees of Freedom
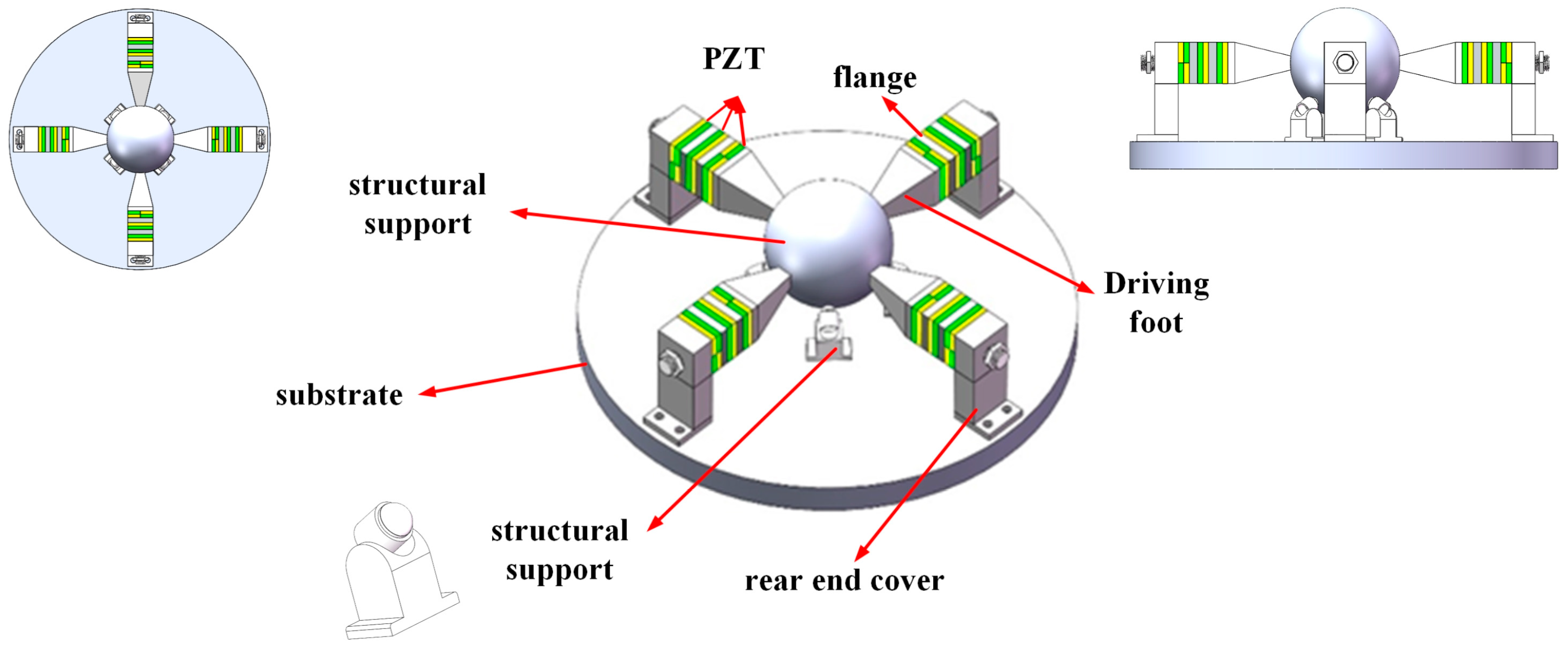
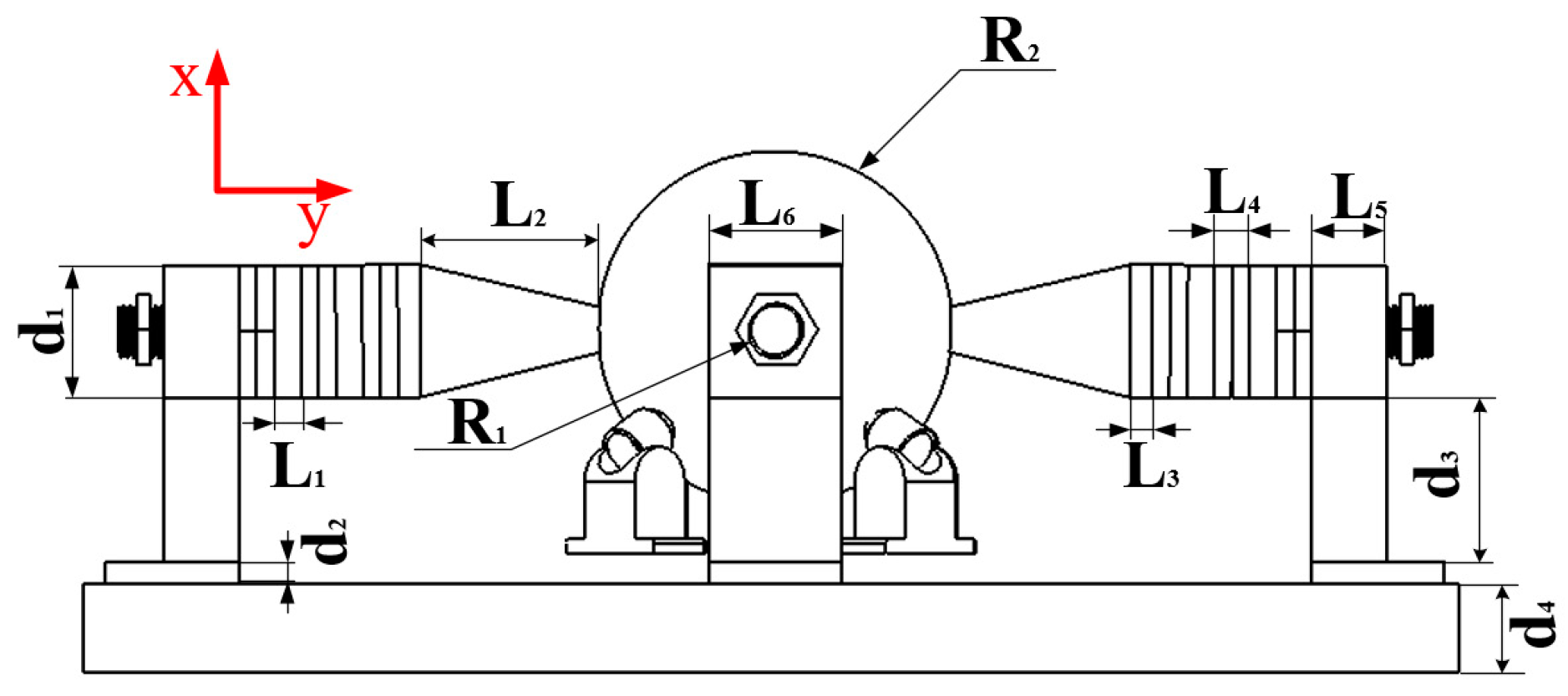
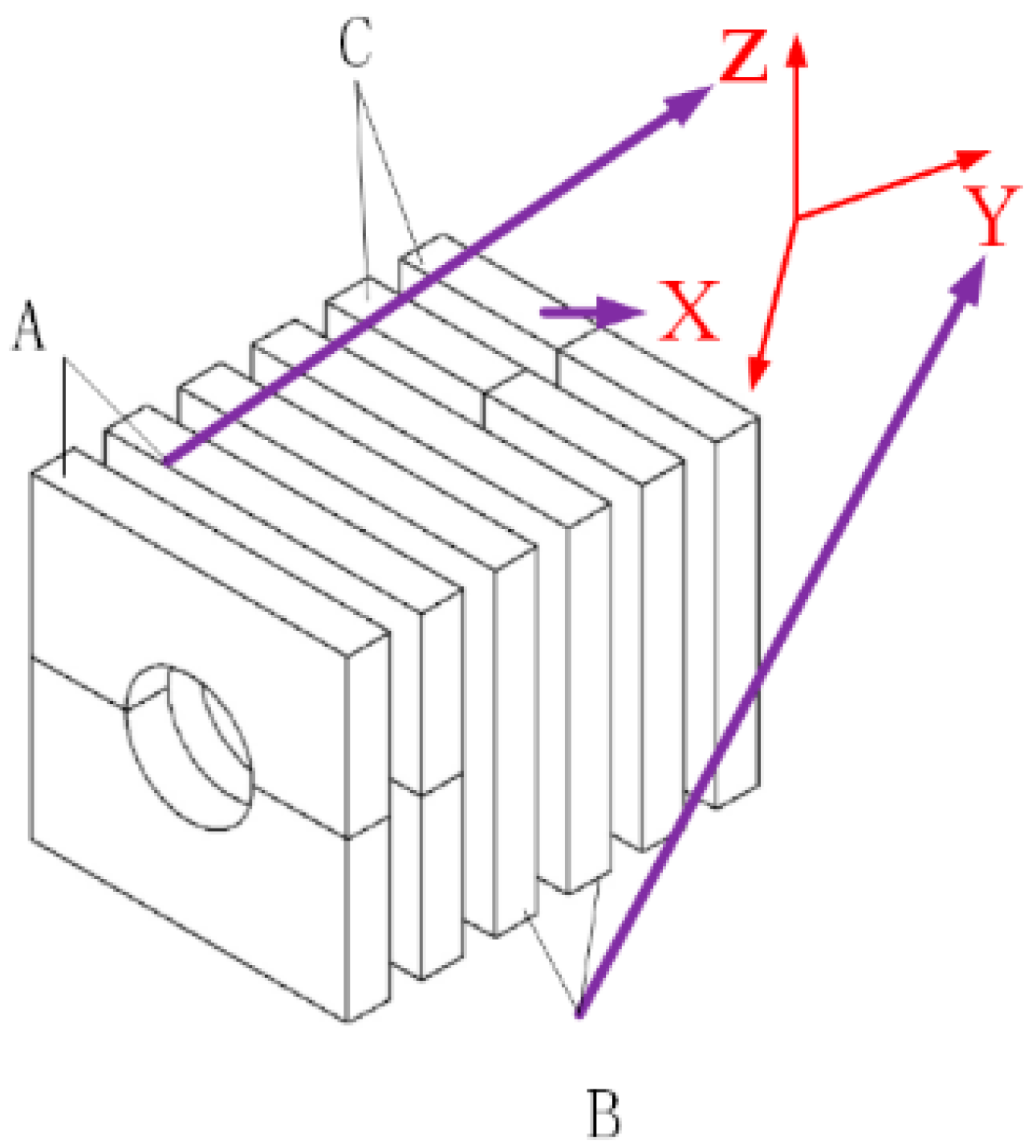
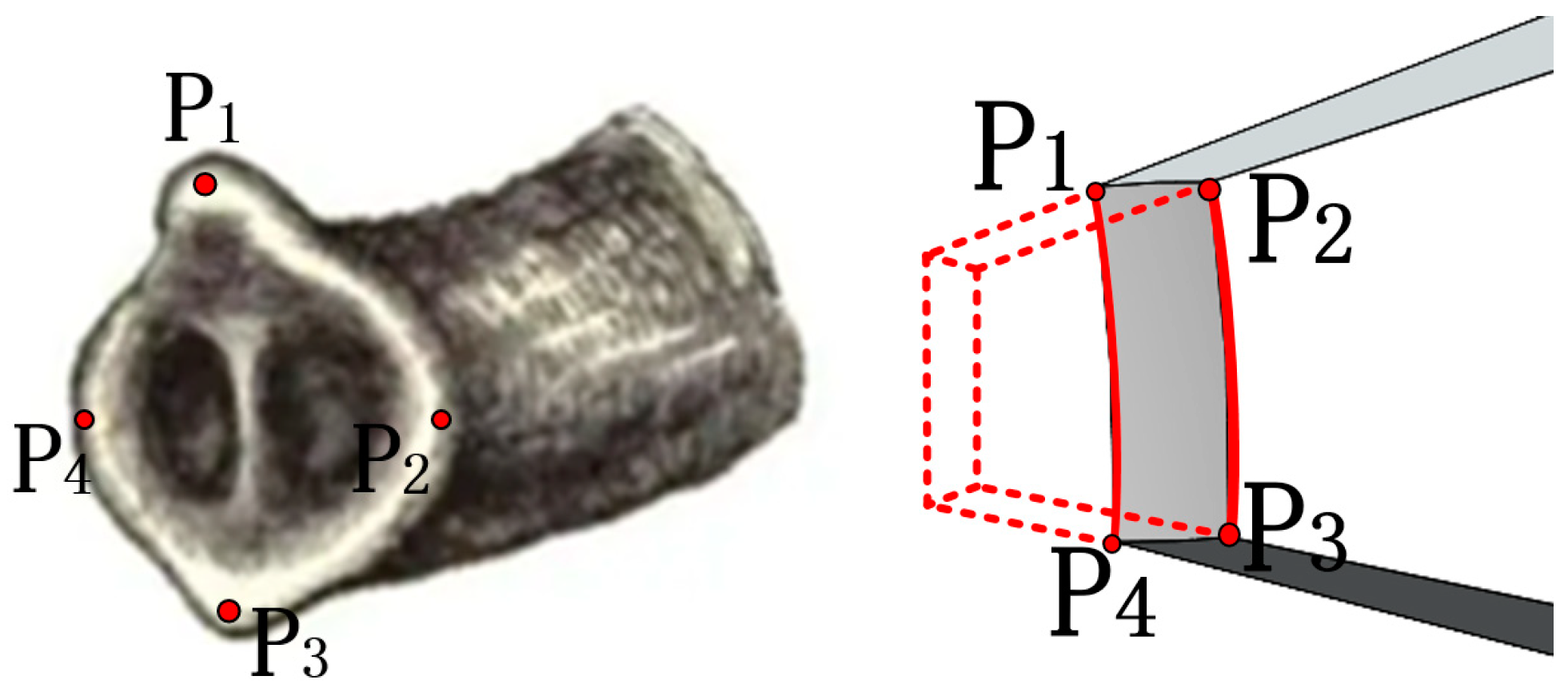
2.1. Stator and Rotor Structure
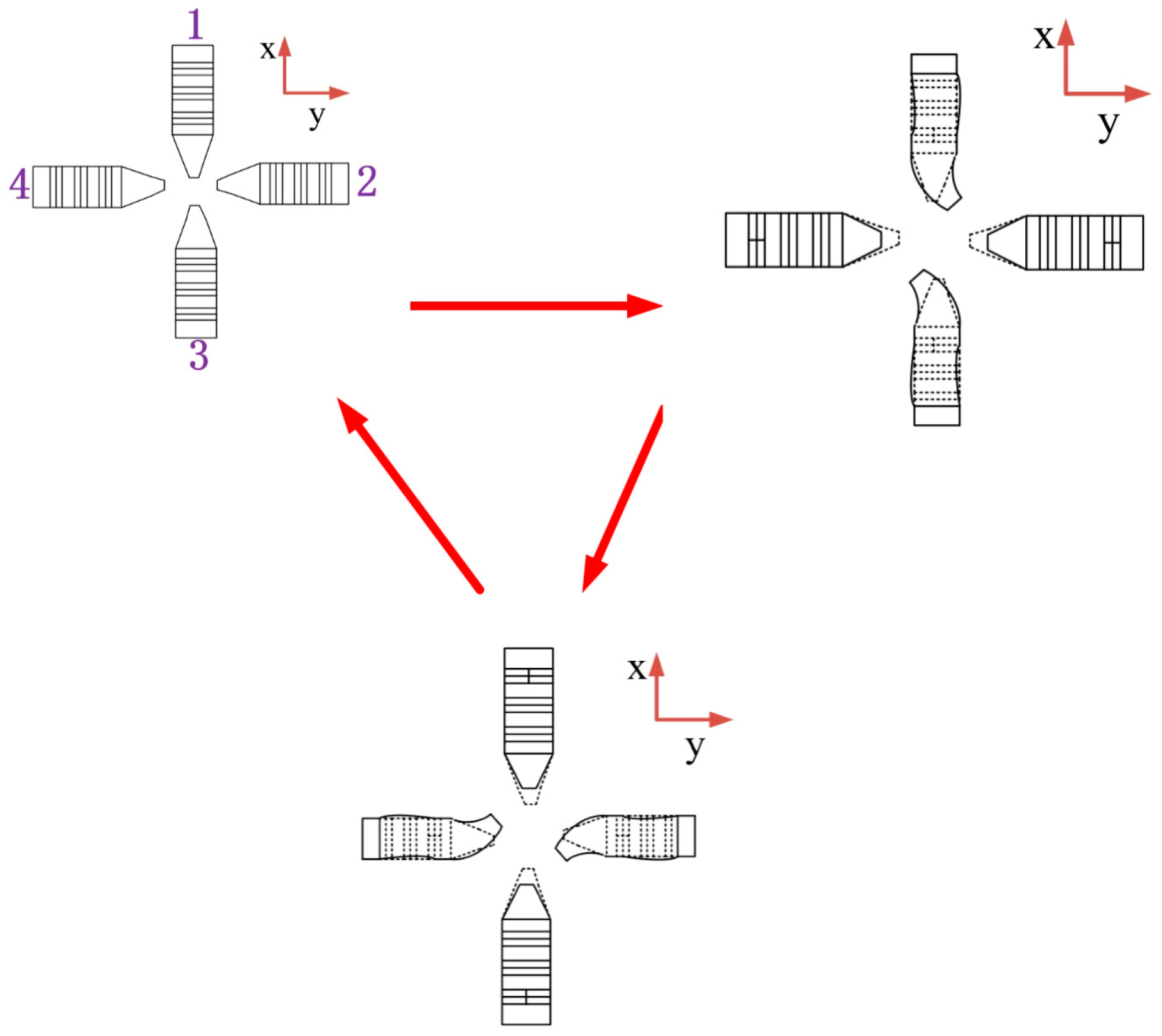
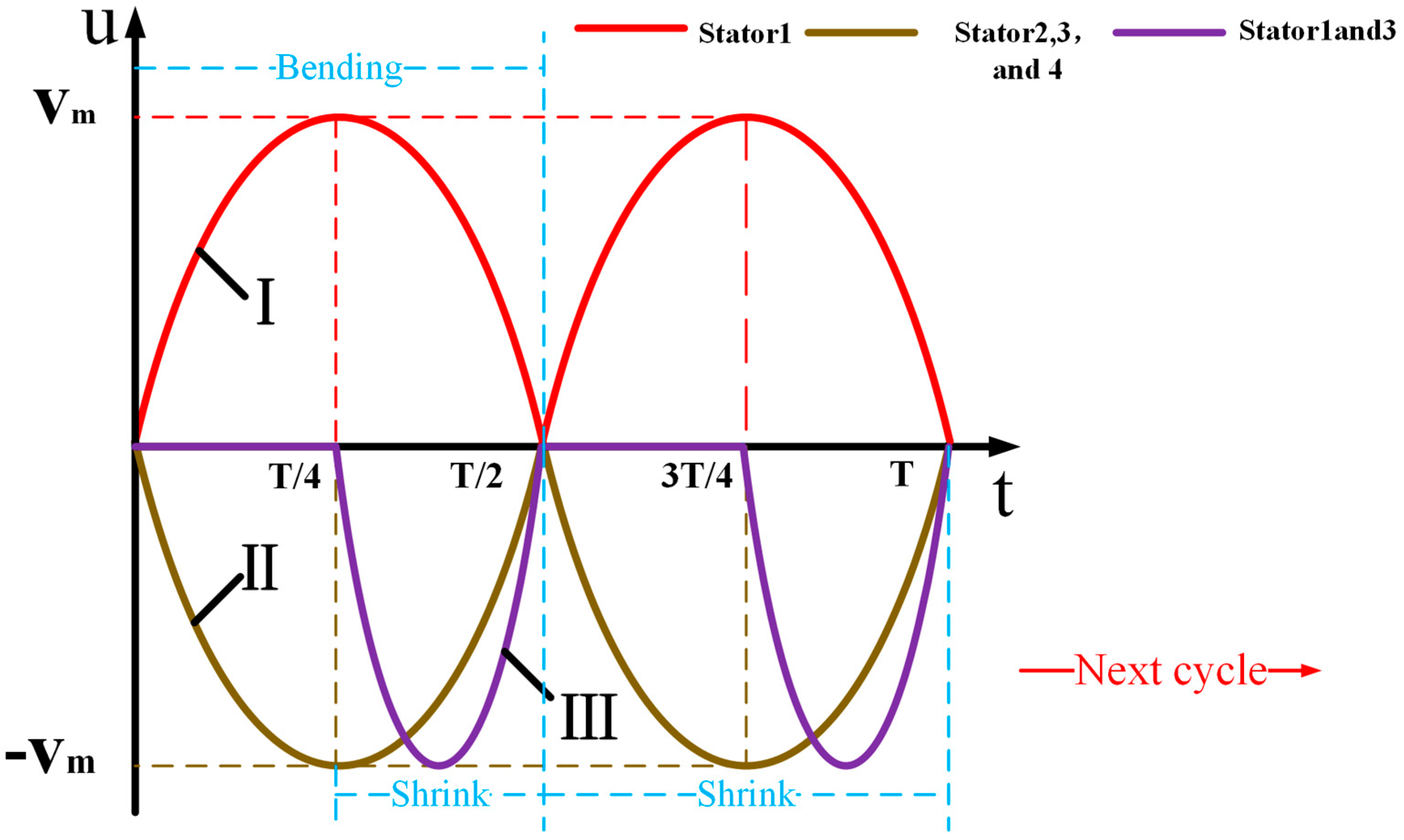
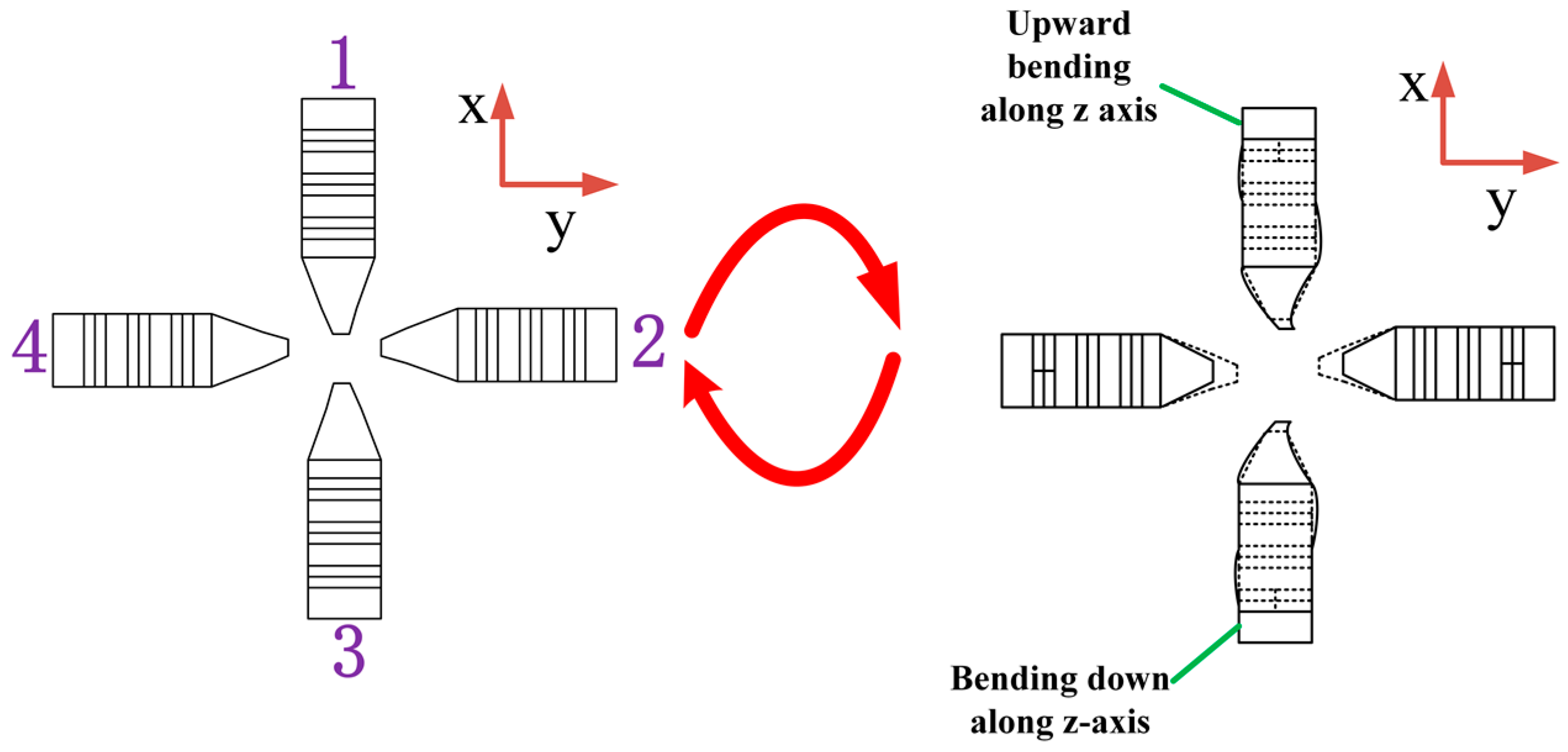
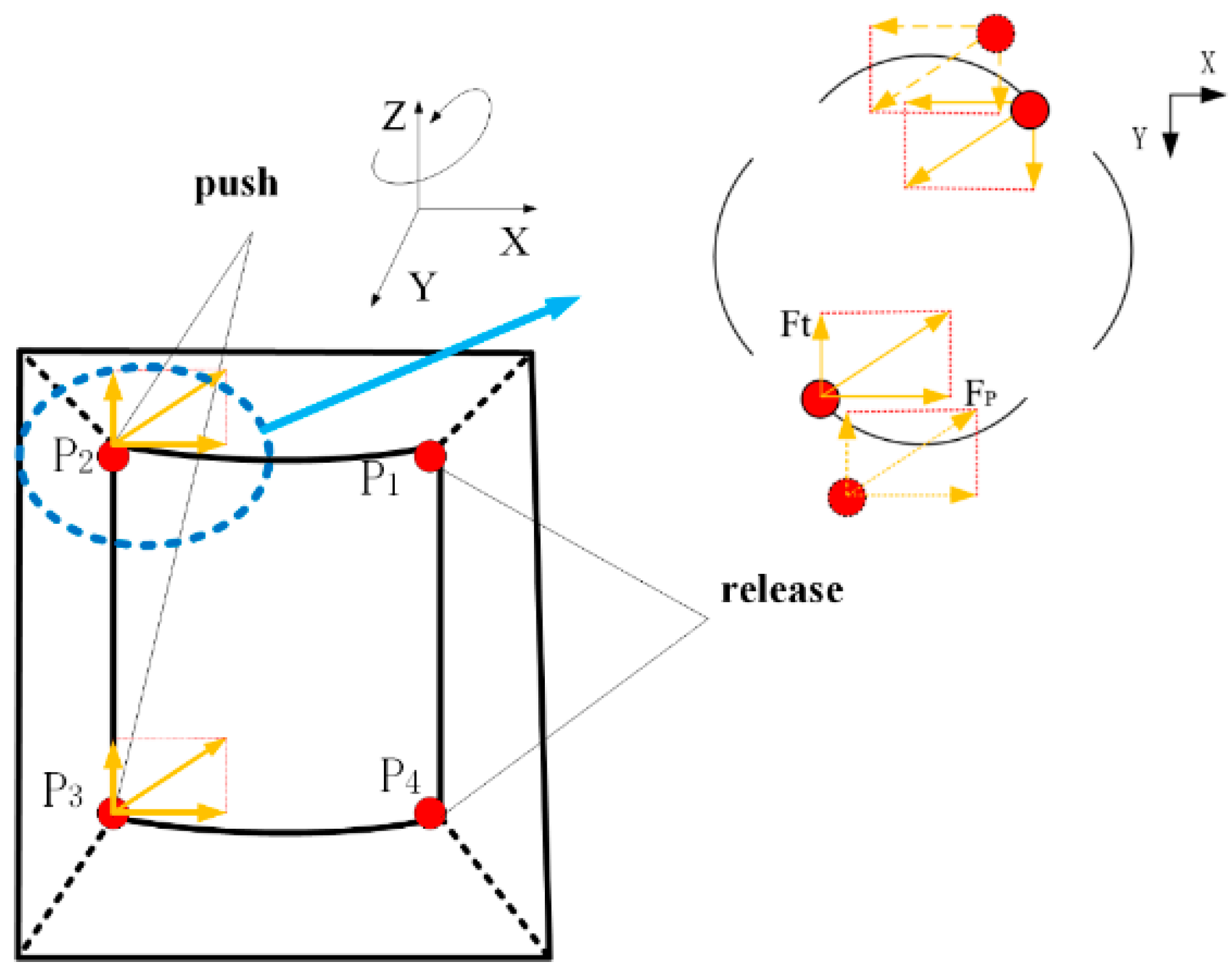
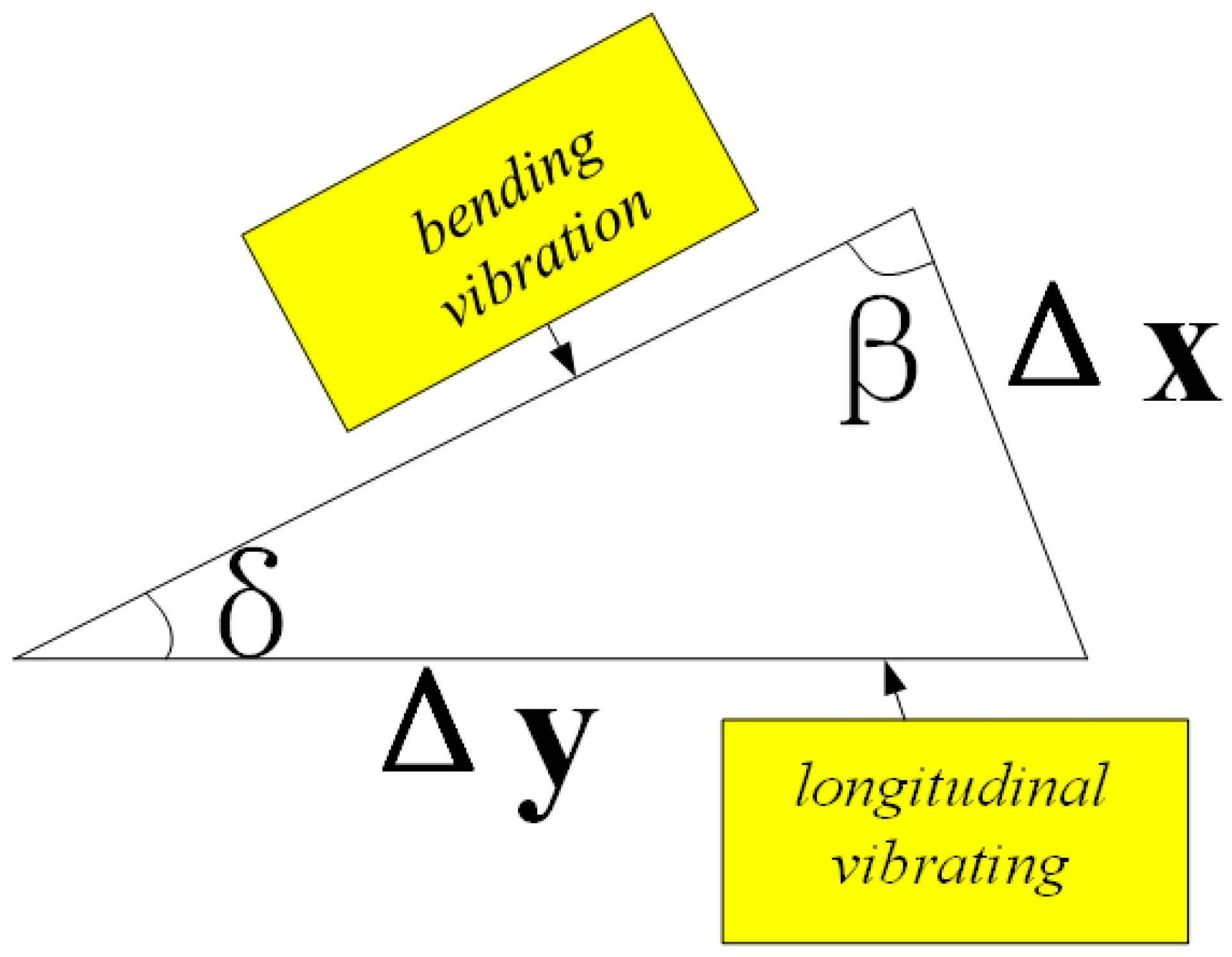
2.2. Working Principle
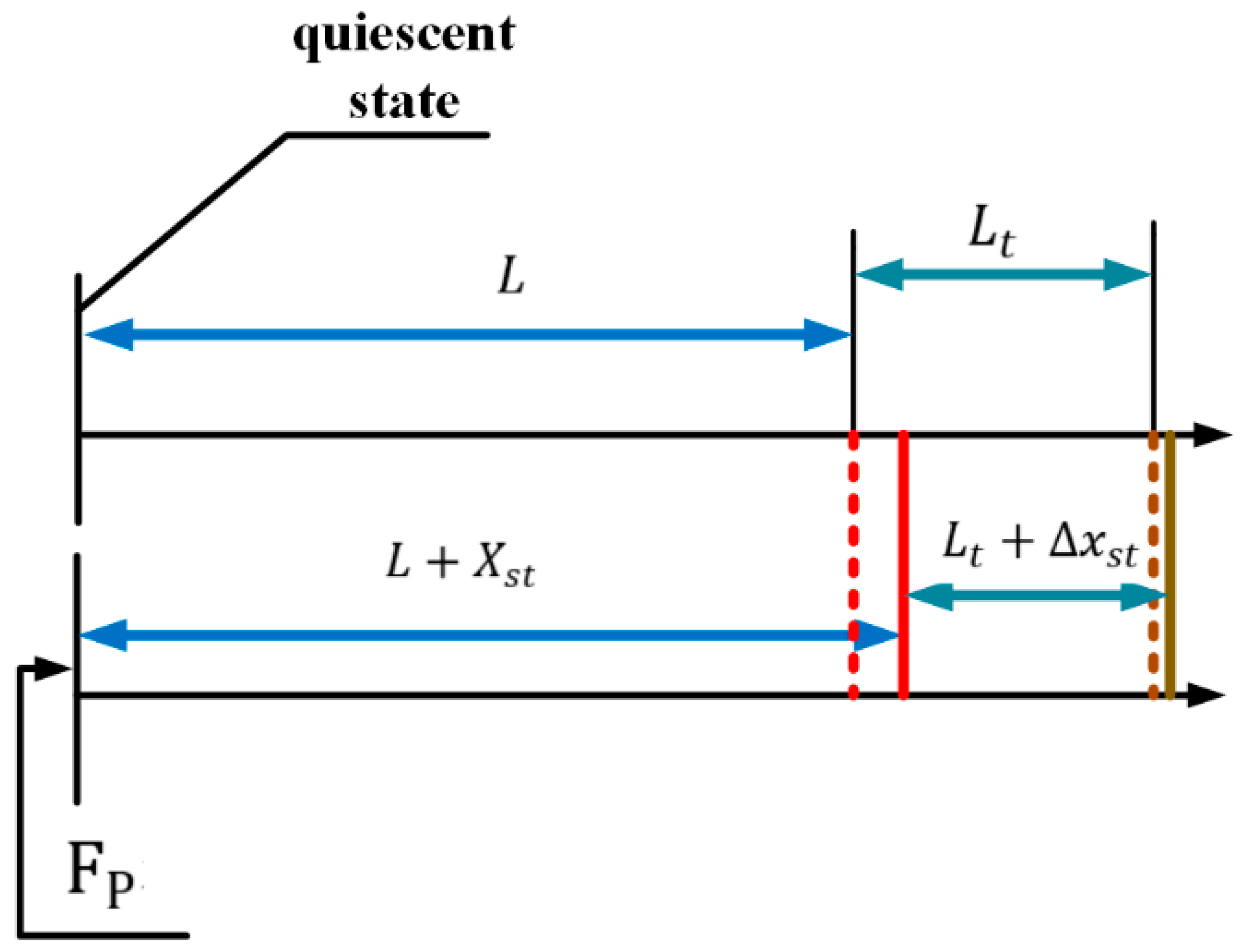
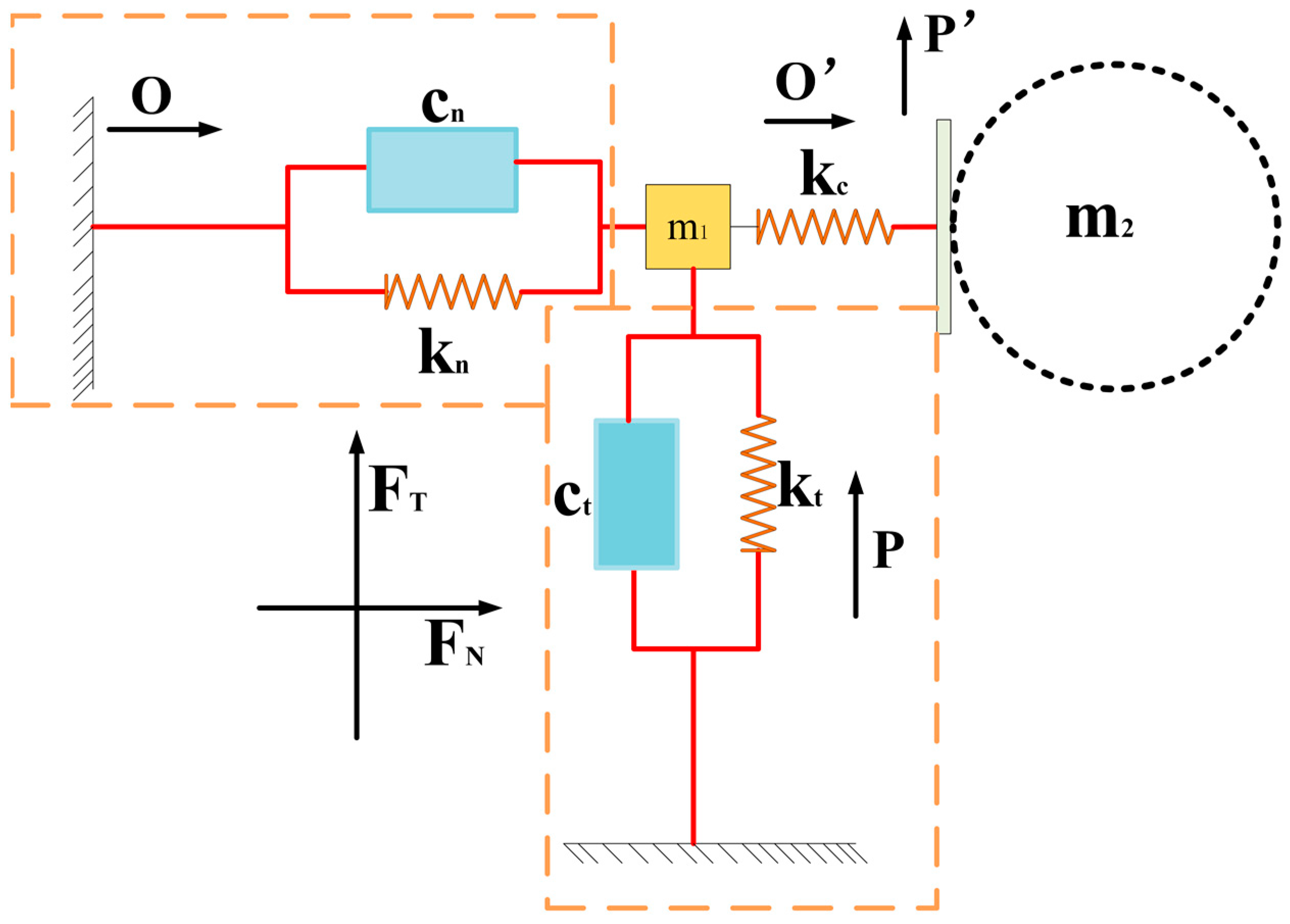
3. Stator-Rotor Dynamics Modeling
4. Driver Model of Electromagnetic-Piezoelectric Hybrid Drive Motor
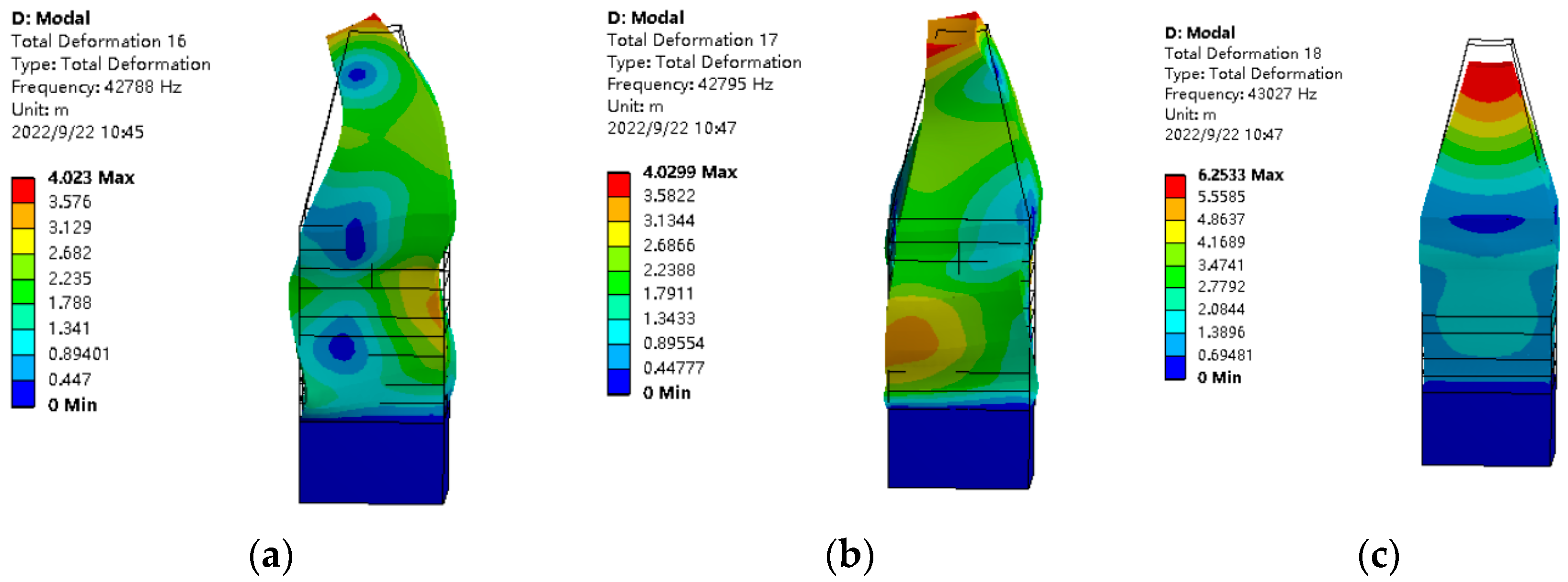
4.1. Modal Analysis
4.2. Harmonic Response
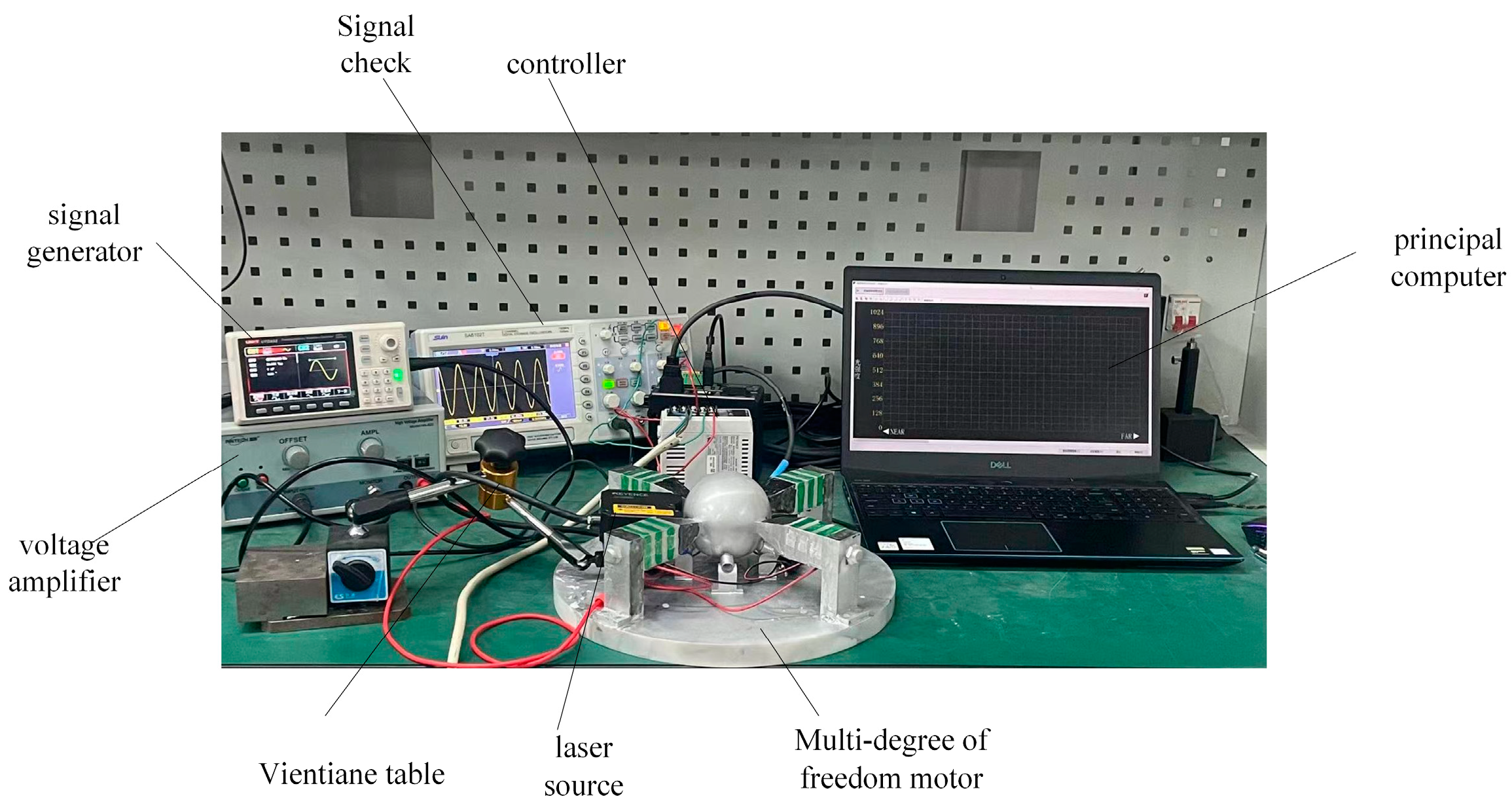
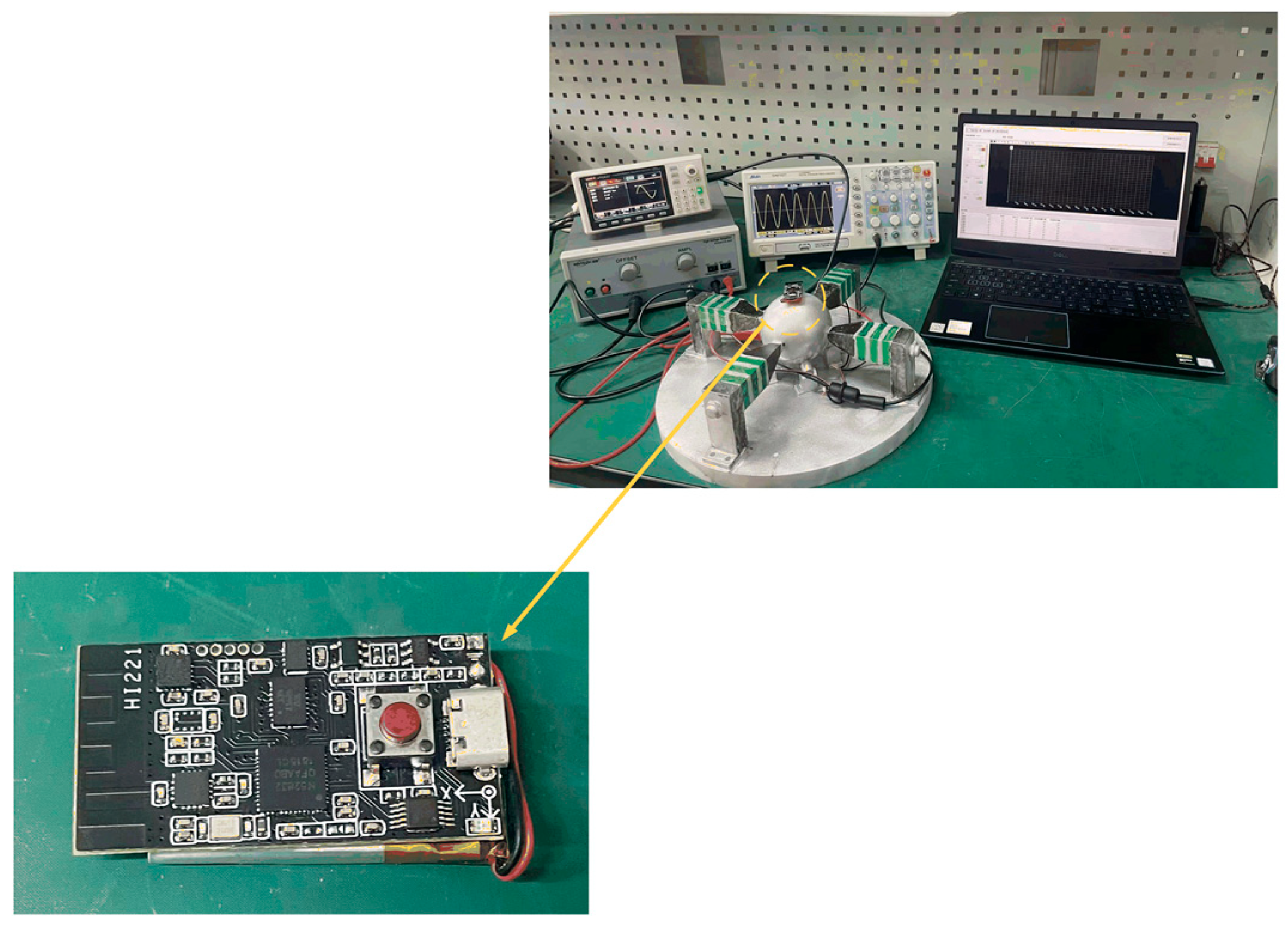
4.3. Experimental Test
4.3.1. Output Displacement under Different Driving Voltages
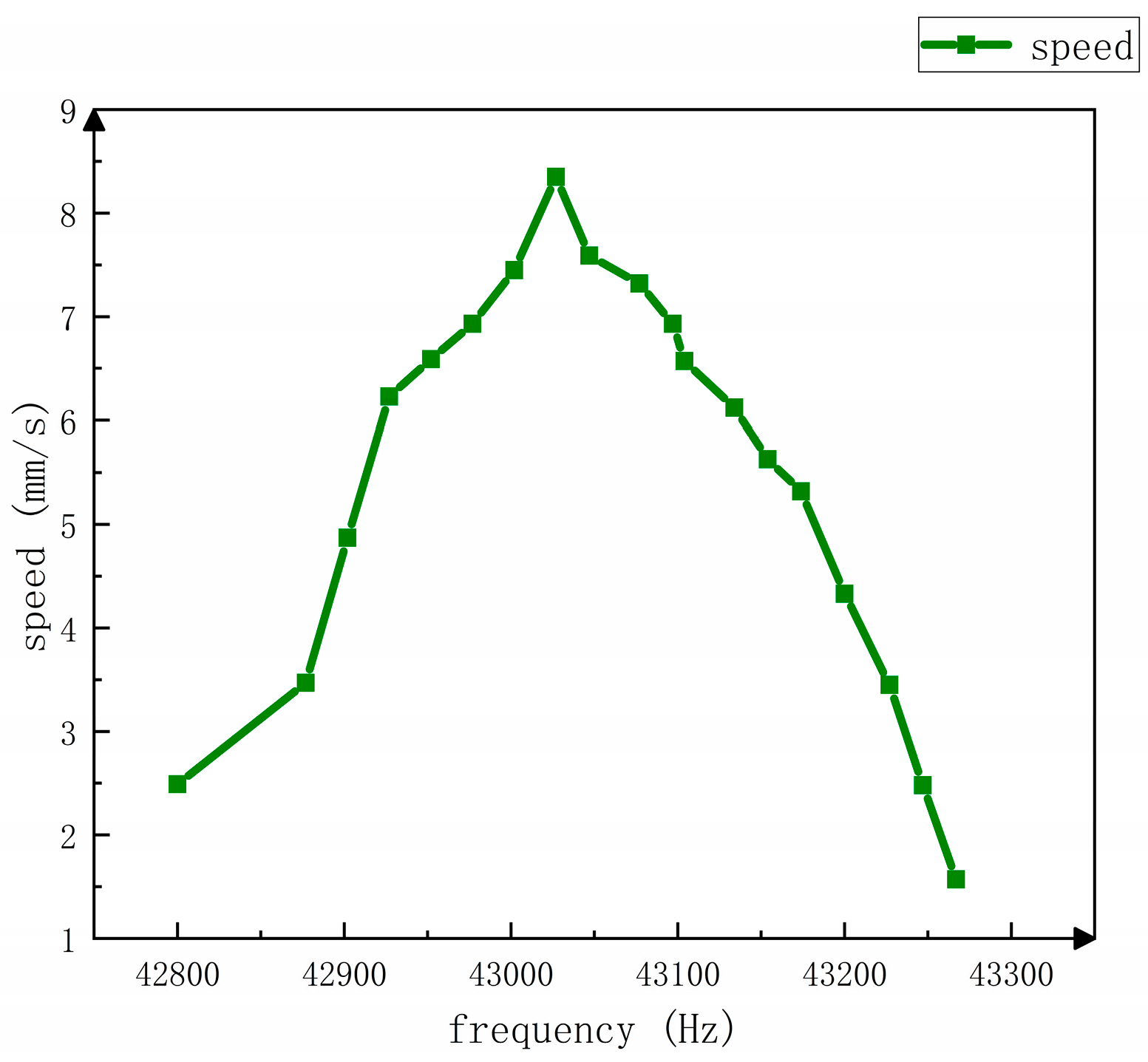
4.3.2. Test the Relationship between Rotor Speed and Voltage Frequency
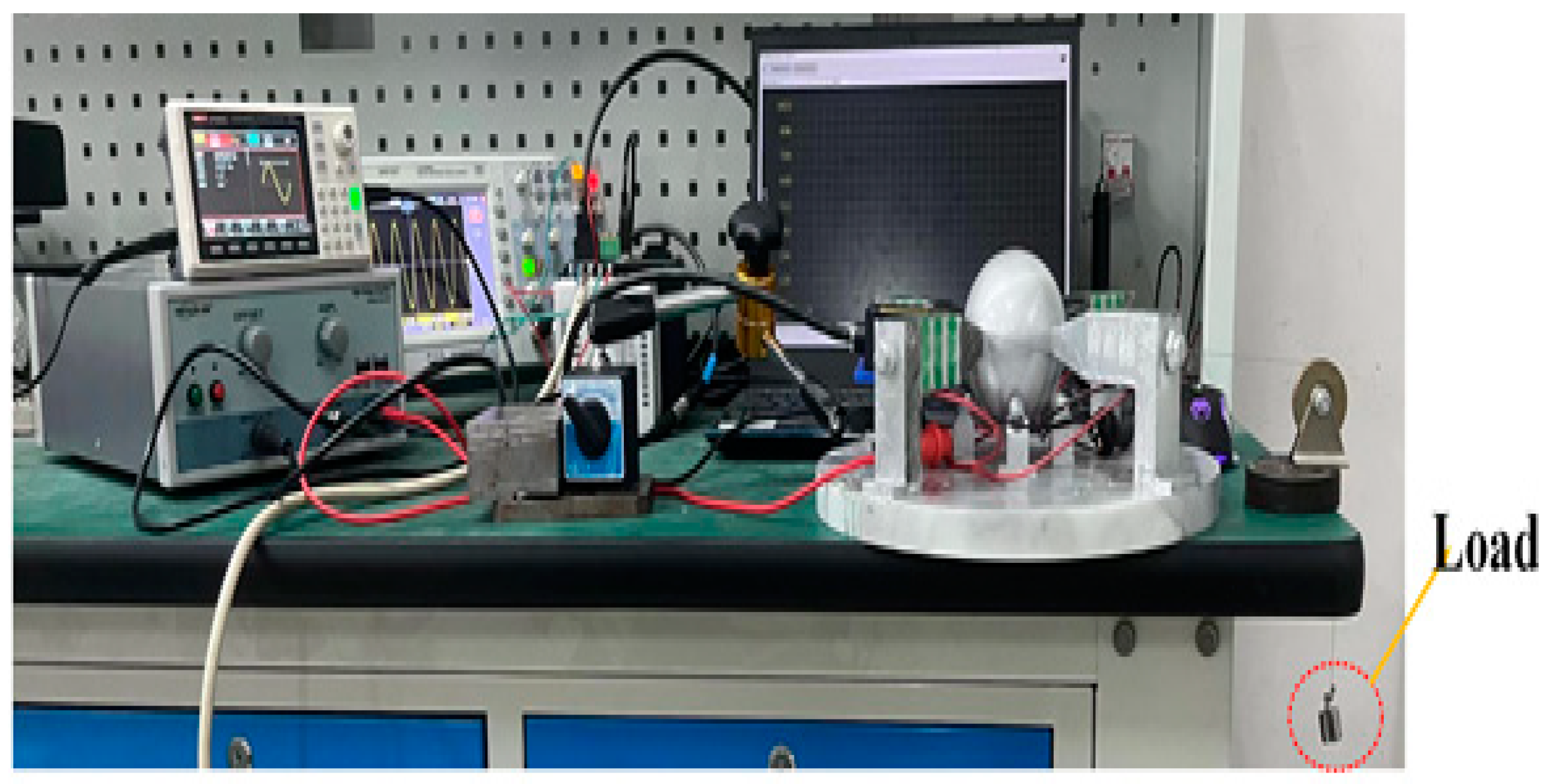
4.3.3. Motor Load Capacity Test
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Xu, D.M.; Liu, Y.X.; Shi, S.J.; Liu, J.K.; Chen, W.S.; Wang, L. Development of a non-resonant piezoelectric motor with nanometer resolution driving ability. IEEE-ASME Trans. Mechatron. 2018, 23, 444–451. [Google Scholar] [CrossRef]
- Zhang, Q.; Chen, W.S.; Liu, Y.X.; Liu, J.K.; Jiang, Q. A frog-shaped linear piezoelectric actuator using first-order longitudinal vibration mode. IEEE Trans. Ind. Electron. 2017, 64, 2188–2195. [Google Scholar] [CrossRef]
- Yu, P.; Wang, L.; Zhang, S.; Jin, J. Transfer matrix modeling and experimental verification of forked piezoelectric actuators. Int. J. Mech. Sci. 2022, 232, 107604. [Google Scholar] [CrossRef]
- Wan, X.; Chen, P.; Xu, Z.; Mo, X.; Jin, H.; Yang, W.; Wang, S.; Duan, J.; Hu, B.; Luo, Z.; et al. Hybrid-Piezoelectret Based Highly Efficient Ultrasonic Energy Harvester for Implantable Electronics. Adv. Funct. Mater. 2022, 32, 2200589. [Google Scholar] [CrossRef]
- Che, Z.; O’Donovan, S.; Xiao, X.; Wan, X.; Chen, G.; Zhao, X.; Zhou, Y.; Yin, J.; Chen, J. Implantable Triboelectric Nanogenerators for Self-Powered Cardiovascular Healthcare. Small 2023, 9, e2207600. [Google Scholar] [CrossRef]
- Zeng, Y.; Jiang, L.; Sun, Y.; Yang, Y.; Quan, Y.; Wei, S.; Lu, G.; Li, R.; Rong, J.; Chen, Y.; et al. 3D-Printing Piezoelectric Composite with Honeycomb Structure for Ultrasonic Devices. Micromachines 2020, 11, 713. [Google Scholar] [CrossRef]
- Zeng, Y.; Jiang, L.; He, Q.; Wodnicki, R.; Yang, Y.; Chen, Y.; Zhou, Q. Recent progress in 3D printing piezoelectric materials for biomedical applications. J. Phys. D Appl. Phys. 2022, 55, 013002. [Google Scholar] [CrossRef]
- Wang, L.; Liu, Y.X.; Li, K.; Chen, S.; Tian, X. Development of a resonant type piezoelectric stepping motor using longitudinal and bending hybrid bolt-clamped transducer. Sens. Actuators A Phys. 2019, 285, 182–189. [Google Scholar] [CrossRef]
- Liu, Y.; Yan, J.; Wang, L.; Chen, W. A two-DOF ultrasonic motor using a longitudinal–bending hybrid sandwich transducer. IEEE Trans. Ind. Electron. 2019, 66, 3041–3050. [Google Scholar] [CrossRef]
- Wu, J.; Mizuno, Y.; Nakamura, K. Piezoelectric motor utilizing an alumina PZT transducer 2020. IEEE Trans. Ind. Electron. 2020, 67, 6762–6772. [Google Scholar] [CrossRef]
- Teimouri, R.; Amini, S. Analytical modeling of ultrasonic surface burnishing process: Evaluation of through depth localized strain. Int. J. Mech. Sci. 2019, 151, 118–132. [Google Scholar] [CrossRef]
- Elhami, S.; Razfar, M.R.; Farahnakian, M. Analytical, numerical and experimental study of cutting force during thermally enhanced ultrasonic assisted milling of hardened. Int. J. Mech. Sci. 2015, 103, 158–171. [Google Scholar] [CrossRef]
- Cao, Y.; Zhu, Y.; Li, H.N.; Wang, C.; Su, H.; Yin, Z.; Ding, W. Development and performance of a novel ultrasonic vibration plate sonotrode for grinding. J. Manuf. Process. 2020, 57, 174–186. [Google Scholar] [CrossRef]
- Liu, Y.; Yan, J.; Xu, D.; Chen, W.; Yang, X.; Tian, X. An I-shape linear piezoelectric actuator using resonant type longitudinal vibration transducers. Mechatronics 2016, 40, 87–95. [Google Scholar] [CrossRef]
- Liu, Z.; Yao, Z.; Jian, Y.; Li, X. A novel plate type linear piezoelectric actuator using dual-frequency drive. Smart Mater. Struct. 2017, 26, 095016. [Google Scholar] [CrossRef]
- Wu, J.; Wang, L.; Du, F.; Zhang, G.; Niu, J.; Rong, X.; Song, R.; Dong, H.; Zhao, J.; Li, Y. A two-DOF linear ultrasonic motor utilizing the actuating approach of longitudinal-traveling-wave/bending-standing-wave hybrid excitation. Int. J. Mech. Sci. 2023, 248, 108223. [Google Scholar] [CrossRef]
- Xu, Z.; Sun, W.X.; Li, X.; Huang, H.; Dong, J. A stick-piezoelectric actuator with high assembly interchangeability. Int. J. Mech. Sci. 2022, 233, 107–662. [Google Scholar] [CrossRef]
- Yin, Z.; Dai, C.; Cao, Z.; Li, W.; Chen, Z.; Li, C. Modal analysis and moving performance of a single-mode linear ultrasonic motor. Ultrasonics 2020, 108, 106–216. [Google Scholar] [CrossRef]
- Liu, Z.; Wang, H.; Yang, P.; Dong, Z.; Zhang, L. Dynamic modeling and analysis of bundled linear ultrasonic motors with non-ideal driving. Ultrasonics 2022, 124, 106–717. [Google Scholar] [CrossRef]
- Lotfi, M.; Amini, S.; Sajjady, S.A. Development of a friction model based on oblique cutting theory. Int. J. Mech. Sci. 2019, 160, 241–254. [Google Scholar] [CrossRef]
- Hunstig, M.; Hemsel, T. Sextro, Modelling the friction contact in an inertia motor. J. Intell. Mater. Syst. Struct. 2013, 24, 1380–1391. [Google Scholar]
- Zeng, P.; Sun, S.J.; Li, L.A.; Xu, F.; Cheng, G.M. Design and testing of a novel piezoelectric micro-motor actuated by asymmetrical inertial impact driving principle. Rev. Sci. Instrum. 2014, 85, 035002. [Google Scholar] [CrossRef]
- Gu, G.Y.; Zhu, L.M.; Su, C.Y.; Ding, H. Fatikow, Modeling and control of piezo-actuated nano positioning stages: A survey. IEEE Trans. Autom. Sci. Eng. 2016, 13, 313–332. [Google Scholar] [CrossRef]
- He, S.Y.; Chiarot, P.R.; Park, S. A single vibration mode tubular piezoelectric ultrasonic motor. IEEE Trans. Ultrason. Ferroelectr. Freq. Control. 2011, 58, 1049–1061. [Google Scholar] [PubMed]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Materials | Density | Young’s Modulus | Poisson’s Ratio |
|---|---|---|---|
| PZT-5 | 7500 | 7.8 × 1010 | 0.35 |
| Al | 2700 | 7.8 × 1010 | 0.33 |
| Structural steel | 7800 | 2.02 × 1011 | 0.30 |
| Parameter | ||||||
|---|---|---|---|---|---|---|
| Numerical value (mm) | 6 | 41 | 5 | 8 | 16.9 | 30 |
| Parameter | ||||||
| Numerical value (mm) | 30 | 5 | 32 | 20 | 6 | 35 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Z.; Wang, K.; Wang, H.; Chen, X.; Guo, X.; Sun, H. Development and Analysis of Multi-Degree-of-Freedom Piezoelectric Actuator Based on Elephant Trunk Structure. Sensors 2023, 23, 6264. https://doi.org/10.3390/s23146264
Li Z, Wang K, Wang H, Chen X, Guo X, Sun H. Development and Analysis of Multi-Degree-of-Freedom Piezoelectric Actuator Based on Elephant Trunk Structure. Sensors. 2023; 23(14):6264. https://doi.org/10.3390/s23146264
Chicago/Turabian StyleLi, Zheng, Kaiwen Wang, Haibo Wang, Xuetong Chen, Xiaoqiang Guo, and Hexu Sun. 2023. "Development and Analysis of Multi-Degree-of-Freedom Piezoelectric Actuator Based on Elephant Trunk Structure" Sensors 23, no. 14: 6264. https://doi.org/10.3390/s23146264
APA StyleLi, Z., Wang, K., Wang, H., Chen, X., Guo, X., & Sun, H. (2023). Development and Analysis of Multi-Degree-of-Freedom Piezoelectric Actuator Based on Elephant Trunk Structure. Sensors, 23(14), 6264. https://doi.org/10.3390/s23146264