Optimal Pressure Sensor Deployment for Leak Identification in Water Distribution Networks

Abstract
1. Introduction
2. Mathematical Model and Numerical Solution
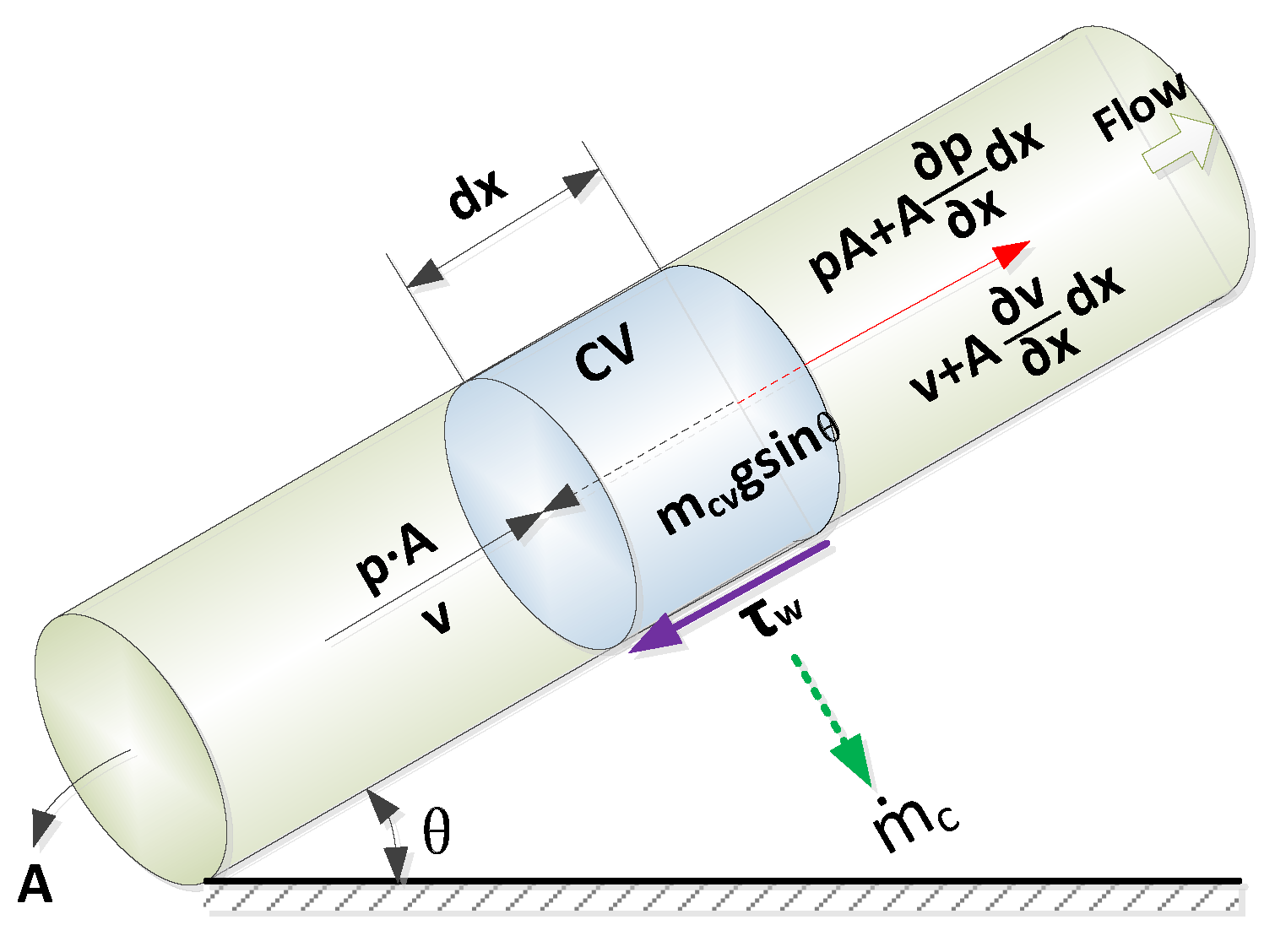
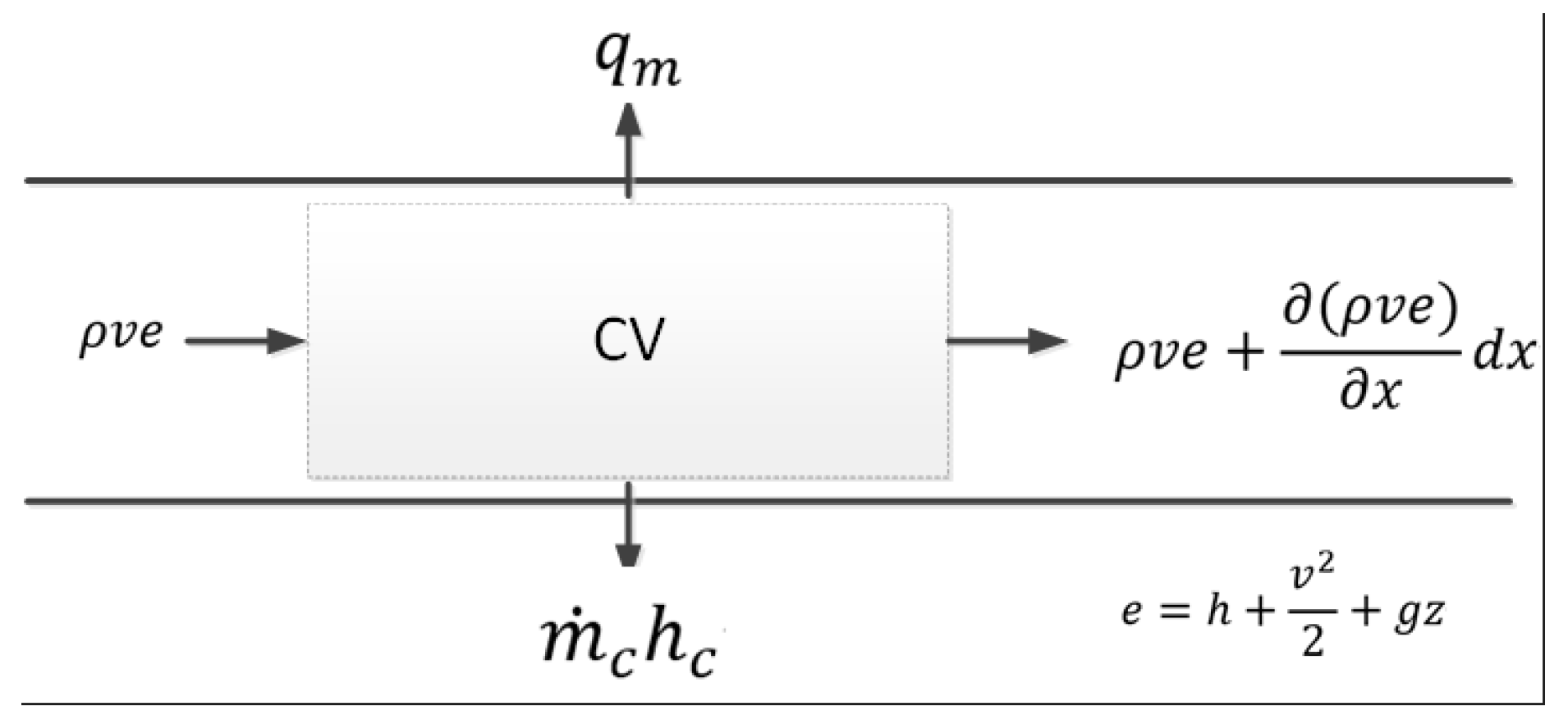
2.1. Straight Pipe with Leakage
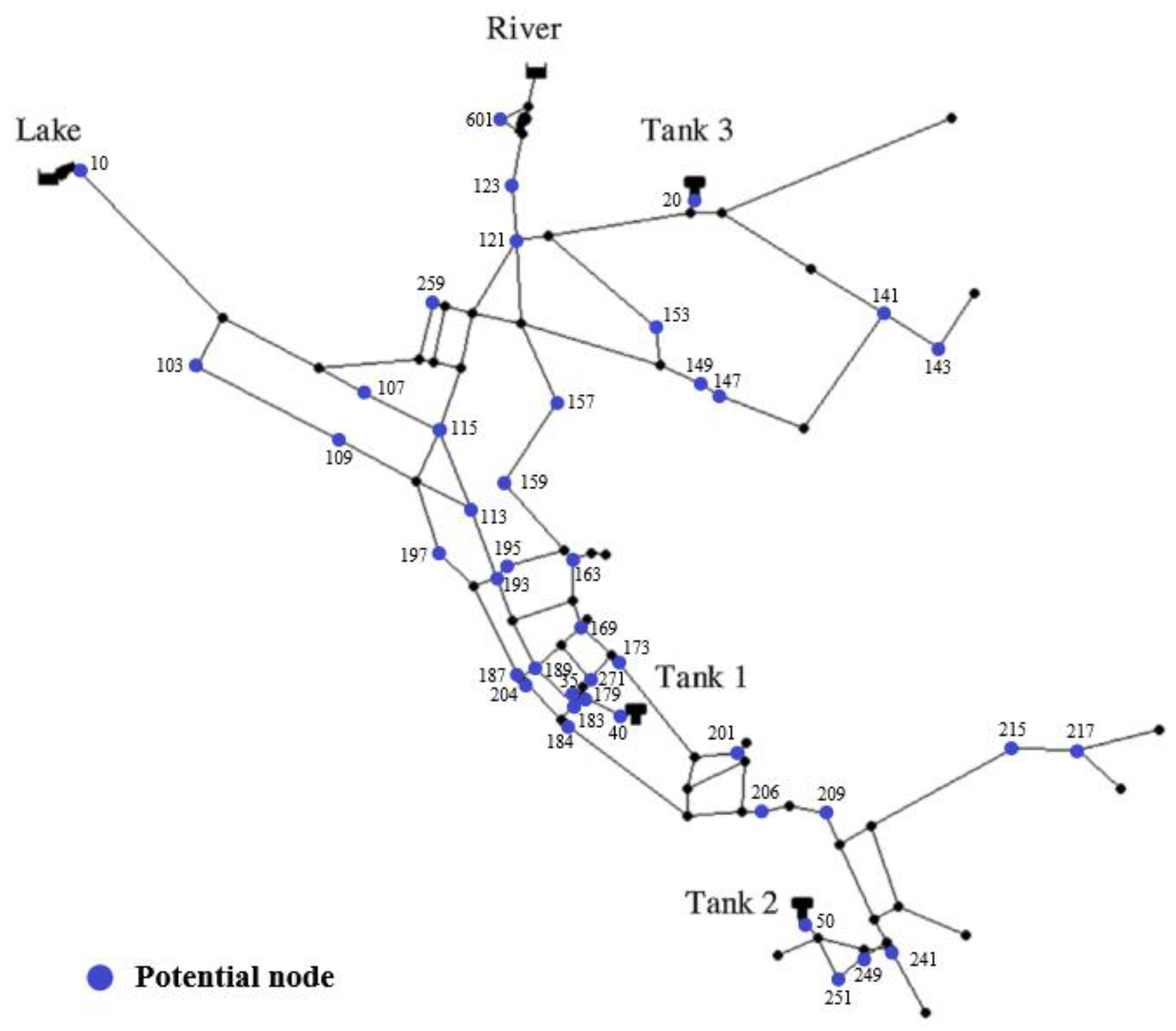
2.2. Pipe Network
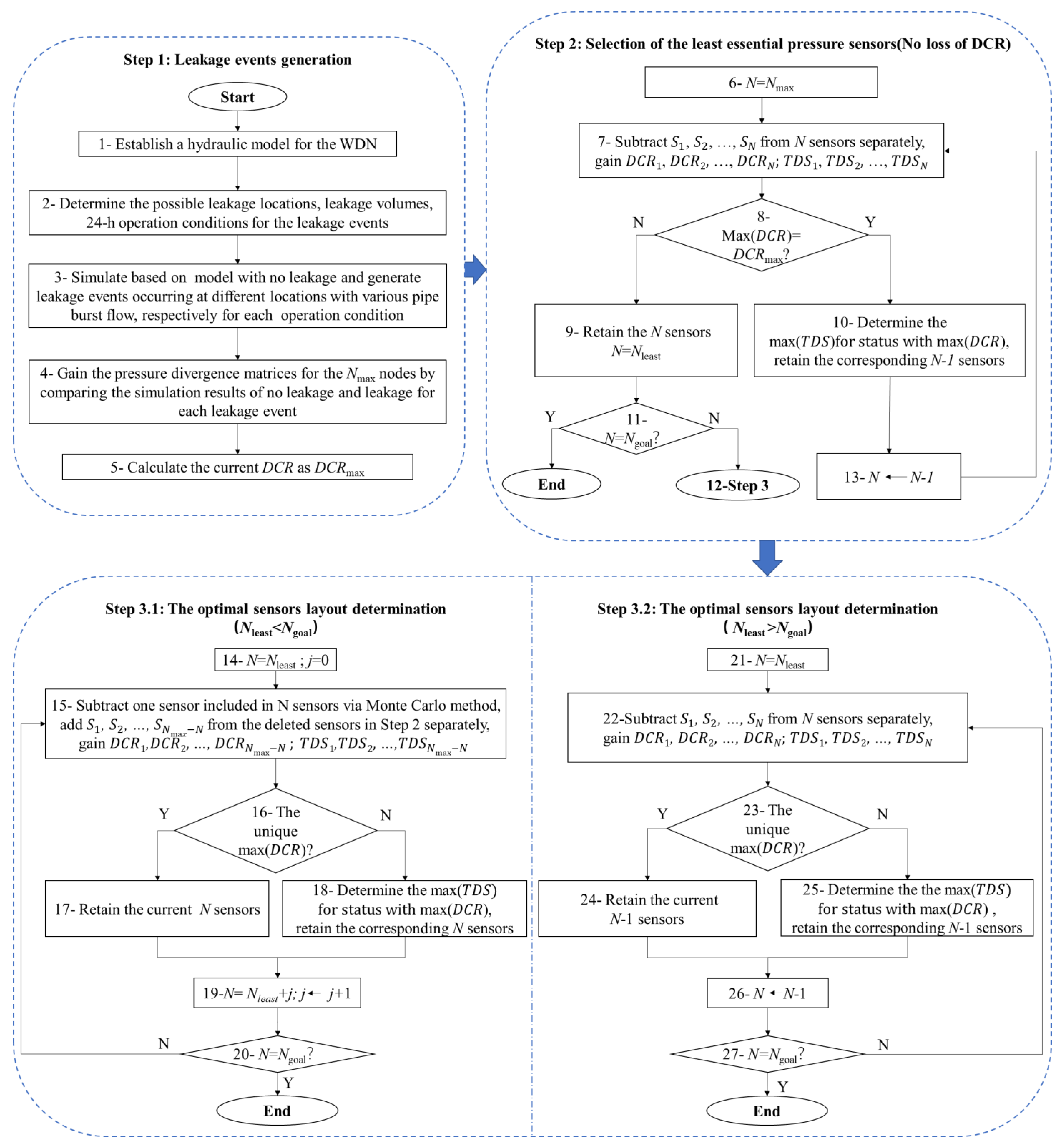
3. Sensor Deployment Method
4. Case Study
4.1. Leakage Event Generation
4.2. The Least Essential Pressure Sensor Selection
4.3. The Optimal Sensor Layout Determination
4.4. Impact of Leakage Model Parameter on Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Moasheri, R.; Jalili-Ghazizadeh, M. Locating of Probabilistic Leakage Areas in Water Distribution Networks by a Calibration Method Using the Imperialist Competitive Algorithm. Water Resour. Manag. 2020, 34, 35–49. [Google Scholar] [CrossRef]
- National Bureau of Statistics of the People’s Republic of China. China Statistical Yearbook; China Statistics Press: Beijing, China, 2021. (In Chinese) [Google Scholar]
- Laspidou, C.S. ICT and stakeholder participation for improved urban water management in the cities of the future. Water Util. J. 2014, 8, 79–85. [Google Scholar]
- Kowalska, B.; Suchorab, P.; Kowalski, D. Division of district metered areas (DMAs) in a part of water supply network using WaterGEMS (Bentley) software: A case study. Appl. Water Sci. 2022, 12, 166. [Google Scholar] [CrossRef]
- El-Zahab, S.; Zayed, T. Leak detection in water distribution networks: An introductory overview. Smart Water 2019, 4, 23–28. [Google Scholar] [CrossRef]
- Abdulshaheed, A.; Mustapha, F.; Ghavamian, A. A pressure-based method for monitoring leaks in a pipe distribution system: A Review. Renew. Sustain. Energy Rev. 2017, 69, 902–911. [Google Scholar] [CrossRef]
- Bykerk, L.; Valls Miro, J. Detection of water leaks in suburban distribution mains with lift and shift vibro-acoustic sensors. Vibration 2022, 5, 370–382. [Google Scholar] [CrossRef]
- Fletcher, R.; Chandrasekaran, M. Smartball-A new approach in pipeline leak detection. In Proceedings of the 2008 ASME International Pipeline Conference, IPC 2008, Calgary, AB, Canada, 29 September–3 October 2008; pp. 117–133. [Google Scholar]
- Lijian, Y.; Ying, G.; Songwei, G. Multi-leak detection in pipeline based on optical fiber detection. Optik 2020, 220, 74–83. [Google Scholar]
- Thusyanthan, I.; Blower, T.; Cleverly, W. Innovative uses of thermal imaging in civil engineering. Proc. Inst. Civ. Eng. 2017, 170, 81–87. [Google Scholar] [CrossRef]
- Farooq, O.; Singh, P.; Hedabou, M.; Boulila, W.; Benjdira, B. Machine Learning Analytic-Based Two-Staged Data Management Framework for Internet of Things. Sensors 2023, 23, 2427. [Google Scholar] [CrossRef]
- Keramat, A.; Xun, W.; Louati, M.; Meniconi, S.; Brunone, B.; Ghidaoui, M.S. Objective functions for transient-based pipeline leakage detection in a noisy environment: Least square and matched-filter. J. Water Resour. Plan. Manag. 2019, 145, 04019042. [Google Scholar] [CrossRef]
- Hu, Z.; Tan, D.; Chen, B.; Shen, D. Review of model-based and data-driven approaches for leak detection and location in water distribution systems. Water Supply 2021, 21, 3282–3306. [Google Scholar] [CrossRef]
- Creaco, E.; Pezzinga, G. Embedding linear programming in multi objective genetic algorithms for reducing the size of the search space with application to leakage minimization in water distribution networks. Environ. Model. Softw. 2015, 69, 308–318. [Google Scholar] [CrossRef]
- Zhang, Q.; Wu, Z.Y.; Zhao, M.; Qi, J.; Huang, Y.; Zhao, H. Leakage zone identification in large-scale water distribution systems using multiclass support vector machines. J. Water Resour. Plan. Manag. 2016, 142, 04016042. [Google Scholar] [CrossRef]
- Hu, X.; Han, Y.; Yu, B.; Geng, Z.; Fan, J. Novel leakage detection and water loss management of urban water supply network using multiscale neural networks. J. Clean. Prod. 2021, 278, 1518–1526. [Google Scholar] [CrossRef]
- Zhang, C.; Alexander, B.J.; Stephens, M.L.; Lambert, M.F.; Gong, J. A convolutional neural network for pipe crack and leak detection in smart water network. Struct. Health Monit. 2023, 22, 232–244. [Google Scholar] [CrossRef]
- Daniel, I.; Pesantez, J.; Letzgus, S.; Khaksar Fasaee, M.A.; Alghamdi, F.; Berglund, E.; Mahinthakumar, G.; Cominola, A. A sequential pressure-based algorithm for data-driven leakage identification and model-based localization in water distribution networks. J. Water Resour. Plan. Manag. 2022, 148, 04022025. [Google Scholar] [CrossRef]
- Casillas, A.; Modera, M.; Pritoni, M. Using non-invasive MEMS pressure sensors for measuring building envelope air leakage. Energy Build. 2021, 233, 64–75. [Google Scholar] [CrossRef]
- Kang, D.; Lansey, K. Novel Approach to Detecting Pipe Bursts in Water Distribution Networks. J. Water Resour. Plan. Manag. 2014, 140, 121–127. [Google Scholar] [CrossRef]
- Nejjari, F.; Sarrate, R.; Blesa, J. Optimal Pressure Sensor Placement in Water Distribution Networks Minimizing Leak Location Uncertainty. Procedia Eng. 2015, 119, 953–962. [Google Scholar] [CrossRef]
- Li, C.; Du, K.; Tu, J.P.; Dong, W. Optimal Placement of Pressure Sensors in Water Distribution System Based on Clustering Analysis of Pressure Sensitive Matrix. Procedia Eng. 2017, 186, 405–411. [Google Scholar]
- Cuguero-Escofet, M.A.; Puig, V.; Quevedo, J. Optimal Pressure Sensor Placement and Assessment for Leak Location Using a Relaxed Isolation Index: Application to the Barcelona Water Network. Control Eng. Pract. 2017, 63, 1–12. [Google Scholar] [CrossRef]
- Ferreira, B.; Carrico, N.; Covas, D. Optimal Number of Pressure Sensors for Real-Time Monitoring of Distribution Networks by Using the Hypervolume Indicator. Water 2021, 13, 2235. [Google Scholar] [CrossRef]
- Li, J.; Wang, C.; Qian, Z.; Lu, C. Optimal sensor placement for leak localization in water distribution networks based on a novel semi-supervised strategy. J. Process Control 2019, 82, 13–21. [Google Scholar] [CrossRef]
- Zhao, M.; Zhang, C.; Liu, H.; Fu, G.; Wang, Y. Optimal sensor placement for pipe burst detection in water distribution systems using cost-benefit analysis. J. Hydroinform. 2020, 22, 606–618. [Google Scholar] [CrossRef]
- Taravatrooy, N.; Nikoo, M.R.; Hobbi, S.; Sadegh, M.; Izady, A. A novel hybrid entropy-clustering approach for optimal placement of pressure sensors for leakage detection in water distribution systems under uncertainty. Urban Water J. 2020, 17, 185–198. [Google Scholar] [CrossRef]
- Sela, L.; Salomons, E.; Housh, M. Plugin prototyping for the EPANET software. Environ. Model. Softw. 2019, 119, 49–56. [Google Scholar] [CrossRef]
- Muller, L.; Gericke, J.; Pietersen, J. Methodological approach for the compilation of a water distribution network model using QGIS and EPANET. J. South Afr. Inst. Civ. Eng. 2020, 62, 32–43. [Google Scholar] [CrossRef]
- Muranho, J.; Ferreira, A.; Sousa, J.; Gomes, A.; Marques, A.S. Pressure-dependent Demand and Leakage Modelling with an EPANET Extension-WaterNetGen. Procedia Eng. 2014, 89, 632–639. [Google Scholar] [CrossRef]
- Hai, W.; Haiying, W.; Tong, Z.; Deng, W. A novel model for steam transportation considering drainage loss in pipeline networks. Appl. Energy 2017, 188, 178–189. [Google Scholar]
- Hai, W.; Wang, H.; Zhou, H.; Zhu, T. Modeling and optimization for hydraulic performance design in multi-source district heating with fluctuating renewables. Energy Convers. Manag. 2018, 156, 113–129. [Google Scholar]
- Hai, W.; Hua, M. Improved thermal transient modeling with new 3-order numerical solution for a district heating network with consideration of the pipe wall’s thermal inertia. Energy 2018, 160, 171–183. [Google Scholar]
- USEPA. “EPANET.” 2020. Available online: https://www.epa.gov/water-research/epanet (accessed on 13 May 2023).
- Schwetschenau, S.E.; Vanbriesen, J.M.; Cohon, J.L. Integrated Multiobjective Optimization and Simulation Model Applied to Drinking Water Treatment Placement in the Context of Existing Infrastructure. J. Water Resour. Plan. Manag. 2019, 145, 04019048. [Google Scholar] [CrossRef]
- Diao, K.; Sweetapple, C.; Farmani, R.; Fu, G.; Ward, S.; Butler, D. Global resilience analysis of water distribution systems. Water Res. 2016, 106, 383–393. [Google Scholar] [CrossRef] [PubMed]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Hour | α | Hour | A | Hour | α | Hour | α |
|---|---|---|---|---|---|---|---|
| 1 | 0.0865 | 7 | 0.9312 | 13 | 0.3230 | 19 | 1.0000 |
| 2 | 0.0661 | 8 | 0.8195 | 14 | 0.2314 | 20 | 0.8984 |
| 3 | 0.0350 | 9 | 0.7670 | 15 | 0.2200 | 21 | 0.8242 |
| 4 | 0.0338 | 10 | 0.7626 | 16 | 0.2715 | 22 | 0.3031 |
| 5 | 0.1631 | 11 | 0.8355 | 17 | 0.7152 | 23 | 0.1333 |
| 6 | 0.7099 | 12 | 0.7764 | 18 | 0.8978 | 24 | 0.1044 |
| Number of Sensors | Optimal DCR (%) | Optimal TDS | Removed Location | Number of Sensors | Optimal DCR (%) | Optimal TDS | Removed Location |
|---|---|---|---|---|---|---|---|
| 41 | 91.35 | 1,163,630 | 50 | 28 | 91.35 | 976,387 | 206 |
| 40 | 91.35 | 1,163,630 | 40 | 27 | 91.35 | 943,294 | 123 |
| 39 | 91.35 | 1,163,630 | 20 | 26 | 91.35 | 910,197 | 193 |
| 38 | 91.35 | 1,163,311 | 121 | 25 | 91.35 | 877,095 | 163 |
| 37 | 91.35 | 1,158,150 | 153 | 24 | 91.35 | 843,807 | 173 |
| 36 | 91.35 | 1,150,979 | 147 | 23 | 91.35 | 810,495 | 157 |
| 35 | 91.35 | 1,137,732 | 143 | 22 | 91.35 | 776,897 | 209 |
| 34 | 91.35 | 1,121,772 | 35 | 21 | 91.35 | 743,264 | 201 |
| 33 | 91.35 | 1,105,780 | 179 | 20 | 91.35 | 709,547 | 241 |
| 32 | 91.35 | 1,087,334 | 249 | 19 | 91.35 | 675,538 | 215 |
| 31 | 91.35 | 1,064,518 | 183 | 18 | 91.35 | 640,128 | 103 |
| 30 | 91.35 | 1,039,493 | 204 | 17 | 91.35 | 600,396 | 115 |
| 29 | 91.35 | 1,009,458 | 197 | 16 | 91.34 | 556,527 | 169 |
| Item | Current Pressure Sensor Deployment | Indexes | ||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| DCR | TDS | |||||||||||||||||||
| First | I | 10 | 107 | 109 | 113 | 141 | 149 | 159 | 169 | 184 | 187 | 189 | 195 | 217 | 251 | 259 | 271 | 601 | 91.35% | 600,396 |
| II | 10 | 107 | 109 | 113 | 141 | 149 | 159 | 169 | 184 | 187 | 189 | 195 | 251 | 259 | 271 | 601 | 88.41% | 564,986 | ||
| III | 10 | 107 | 109 | 113 | 141 | 149 | 159 | 169 | 184 | 187 | 189 | 195 | 215 | 251 | 259 | 271 | 601 | 91.35% | 598,995 | |
| Second | I | 10 | 107 | 109 | 113 | 141 | 149 | 159 | 169 | 184 | 187 | 189 | 195 | 215 | 251 | 259 | 271 | 601 | 91.35% | 598,995 |
| II | 10 | 107 | 109 | 113 | 141 | 149 | 159 | 169 | 184 | 187 | 195 | 215 | 251 | 259 | 271 | 601 | 91.34% | 550,310 | ||
| III | 10 | 107 | 109 | 113 | 141 | 149 | 159 | 169 | 184 | 187 | 197 | 195 | 215 | 251 | 259 | 271 | 601 | 91.35% | 580,345 | |
| 10 | 107 | 109 | 113 | 141 | 149 | 159 | 169 | 184 | 187 | 204 | 195 | 215 | 251 | 259 | 271 | 601 | 91.35% | 575,335 | ||
| 10 | 107 | 109 | 113 | 141 | 149 | 159 | 169 | 184 | 187 | 183 | 195 | 215 | 251 | 259 | 271 | 601 | 91.35% | 573,126 | ||
| Third | I | 10 | 107 | 109 | 113 | 141 | 149 | 159 | 169 | 184 | 187 | 197 | 195 | 215 | 251 | 259 | 271 | 601 | 91.35% | 580,345 |
| II | 10 | 107 | 109 | 113 | 141 | 149 | 159 | 169 | 184 | 187 | 197 | 195 | 215 | 251 | 259 | 601 | 90.64% | 527,327 | ||
| III | 10 | 107 | 109 | 113 | 141 | 149 | 159 | 169 | 184 | 187 | 197 | 195 | 215 | 251 | 259 | 183 | 601 | 90.83% | 550,143 | |
| 10 | 107 | 109 | 113 | 141 | 149 | 159 | 169 | 184 | 187 | 197 | 195 | 215 | 251 | 259 | 201 | 601 | 90.83% | 560,960 | ||
| Fourth | I | 10 | 107 | 109 | 113 | 141 | 149 | 159 | 169 | 184 | 187 | 197 | 195 | 215 | 251 | 259 | 201 | 601 | 90.83% | 560,960 |
| II | 107 | 109 | 113 | 141 | 149 | 159 | 169 | 184 | 187 | 197 | 195 | 215 | 251 | 259 | 201 | 601 | 90.81% | 524,856 | ||
| III | 103 | 107 | 109 | 113 | 141 | 149 | 159 | 169 | 184 | 187 | 197 | 195 | 215 | 251 | 259 | 201 | 601 | 90.83% | 560,266 | |
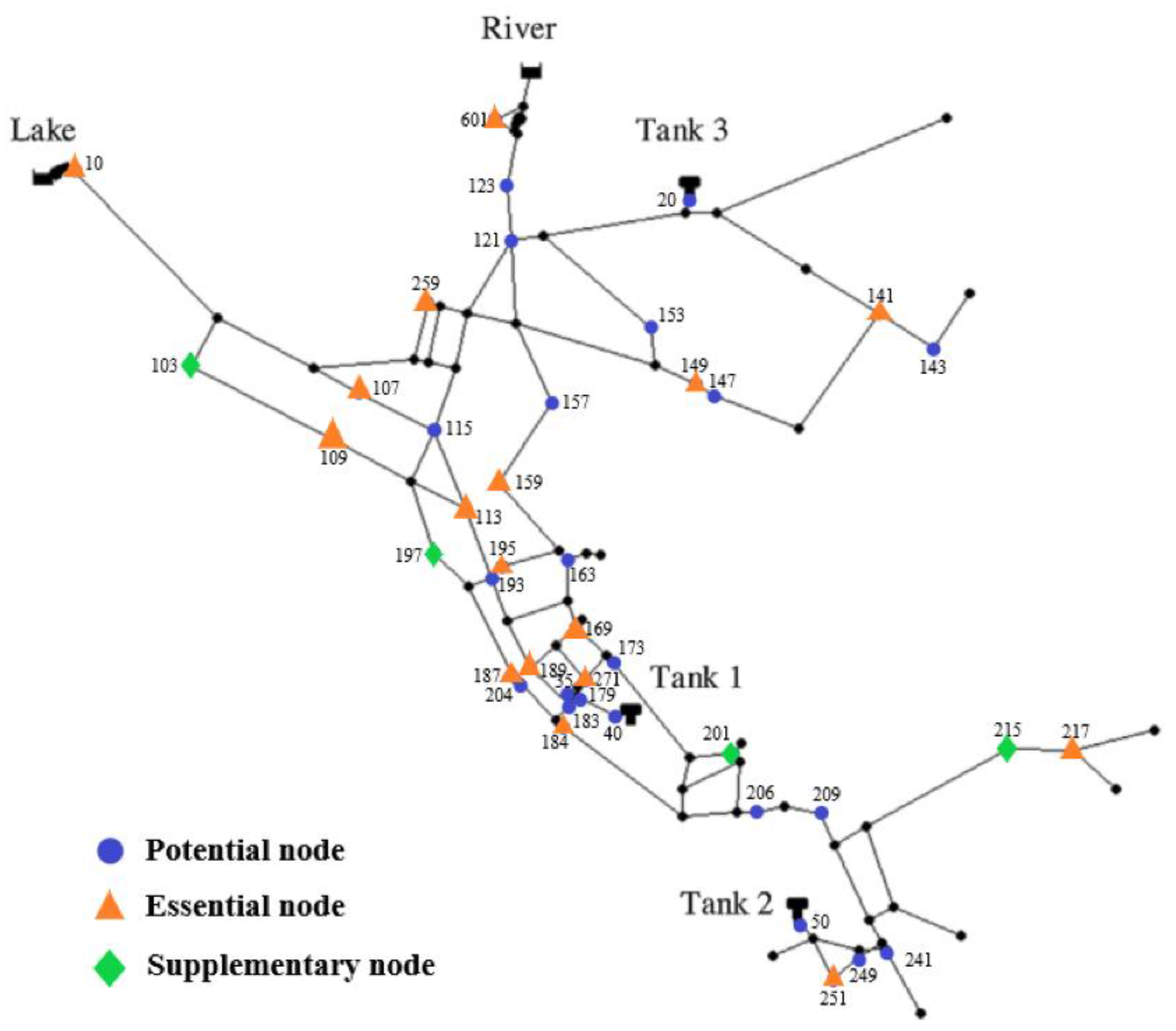
 represents the hypothetical failed sensors and
represents the hypothetical failed sensors and  represents the replacement supplementary sensors.
represents the replacement supplementary sensors.| Node | Total Samples | Leakage Location | Burst Flow | ||||
|---|---|---|---|---|---|---|---|
| Loc_0.25 | Loc_0.5 | Loc_0.75 | Flow_1% | Flow_3% | Flow_6% | ||
| 217 | ○ | ○ | ○ | ○ | ○ | ○ | ○ |
| 215 | △ | - | - | - | - | - | △ |
| 241 | - | - | - | △ | △ | △ | △ |
| 189 | ○ | △ | ○ | ○ | △ | ○ | ○ |
| 271 | ○ | ○ | ○ | ○ | ○ | ○ | ○ |
| 209 | - | ○ | ○ | - | - | - | ○ |
| 115 | - | △ | ○ | - | ○ | - | △ |
| 10 | ○ | - | - | ○ | ○ | ○ | - |
| 206 | - | - | - | △ | △ | △ | - |
| 159 | ○ | ○ | ○ | ○ | ○ | ○ | ○ |
| 193 | - | - | - | - | - | - | - |
| 201 | △ | △ | △ | ○ | ○ | △ | △ |
| 109 | ○ | ○ | ○ | △ | △ | ○ | ○ |
| 169 | ○ | ○ | △ | ○ | △ | ○ | ○ |
| 173 | - | - | - | - | - | - | - |
| 107 | ○ | ○ | ○ | ○ | ○ | ○ | ○ |
| 103 | △ | ○ | △ | △ | ○ | △ | △ |
| 195 | ○ | ○ | ○ | ○ | ○ | ○ | ○ |
| 123 | - | - | - | - | - | - | - |
| 259 | ○ | ○ | ○ | ○ | ○ | ○ | ○ |
| 163 | - | - | - | - | ○ | ○ | - |
| 601 | ○ | ○ | ○ | ○ | ○ | ○ | ○ |
| 113 | ○ | ○ | ○ | ○ | ○ | ○ | ○ |
| 157 | - | - | - | - | - | - | - |
| 197 | △ | △ | △ | △ | △ | △ | △ |
| 187 | ○ | △ | ○ | - | - | ○ | - |
| 184 | ○ | ○ | ○ | ○ | ○ | ○ | ○ |
| 204 | - | - | - | - | - | - | - |
| 183 | - | - | - | - | - | - | - |
| 249 | - | - | - | - | - | - | - |
| 251 | ○ | ○ | ○ | ○ | - | - | ○ |
| 35 | - | - | - | - | - | - | - |
| 179 | - | - | - | - | - | - | - |
| 141 | ○ | ○ | ○ | ○ | - | - | - |
| 149 | ○ | ○ | ○ | ○ | ○ | ○ | ○ |
| 147 | - | - | - | - | - | - | - |
| 153 | - | - | - | - | - | - | - |
| 143 | - | - | - | - | - | - | - |
| 121 | - | - | - | - | - | - | - |
| 20 | - | - | - | - | - | - | - |
| 40 | - | - | - | - | - | - | - |
| 50 | - | - | - | - | - | - | - |
| DCR | 91.35% | 91.31% | 91.31% | 91.32% | 91.23% | 91.24% | 91.11% |
| TDS | 733,483 | 736,700 | 736,700 | 730,479 | 769,253 | 765,304 | 753,873 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, G.; Wang, H. Optimal Pressure Sensor Deployment for Leak Identification in Water Distribution Networks. Sensors 2023, 23, 5691. https://doi.org/10.3390/s23125691
Yang G, Wang H. Optimal Pressure Sensor Deployment for Leak Identification in Water Distribution Networks. Sensors. 2023; 23(12):5691. https://doi.org/10.3390/s23125691
Chicago/Turabian StyleYang, Guang, and Hai Wang. 2023. "Optimal Pressure Sensor Deployment for Leak Identification in Water Distribution Networks" Sensors 23, no. 12: 5691. https://doi.org/10.3390/s23125691
APA StyleYang, G., & Wang, H. (2023). Optimal Pressure Sensor Deployment for Leak Identification in Water Distribution Networks. Sensors, 23(12), 5691. https://doi.org/10.3390/s23125691