

Reducing Power Line Interference from sEMG Signals Based on Synchrosqueezed Wavelet Transform

Abstract
1. Introduction
2. Description of the PLI Filters
2.1. Continuous Wavelet Transform
2.2. Synchrosqueezed Wavelet Transform
2.3. Local CWT/SWT Related to the PLI
2.4. Value of
2.5. Adaptive Threshold
2.6. RLM Algorithm
2.7. Ridge Extraction Methods for PLI Filtering
3. Method Description
3.1. Simulation of the sEMG and PLI Signals
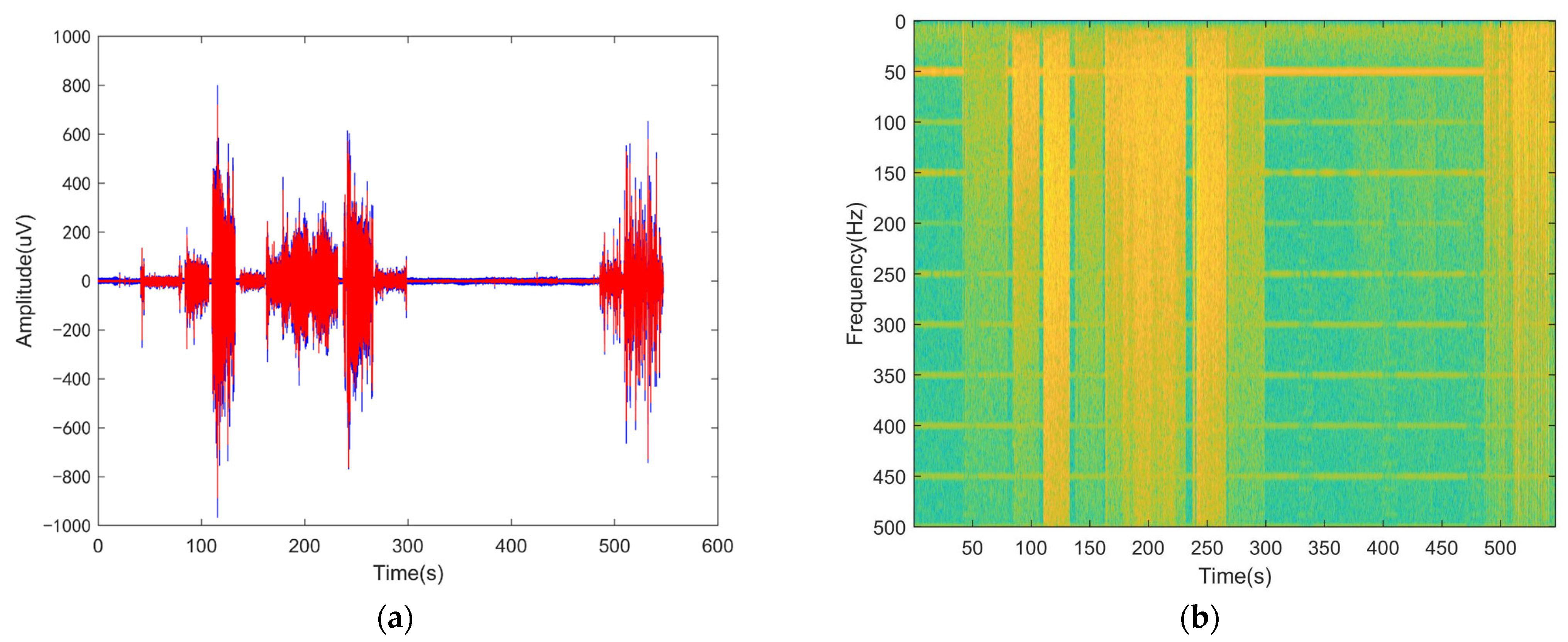
3.2. Obtaining of Real sEMG Signals
3.3. Performance Evaluation Criteria
3.4. Optimization of the Parameters
3.5. Statistic Analysis
4. Results
4.1. Parameters of the LSWT
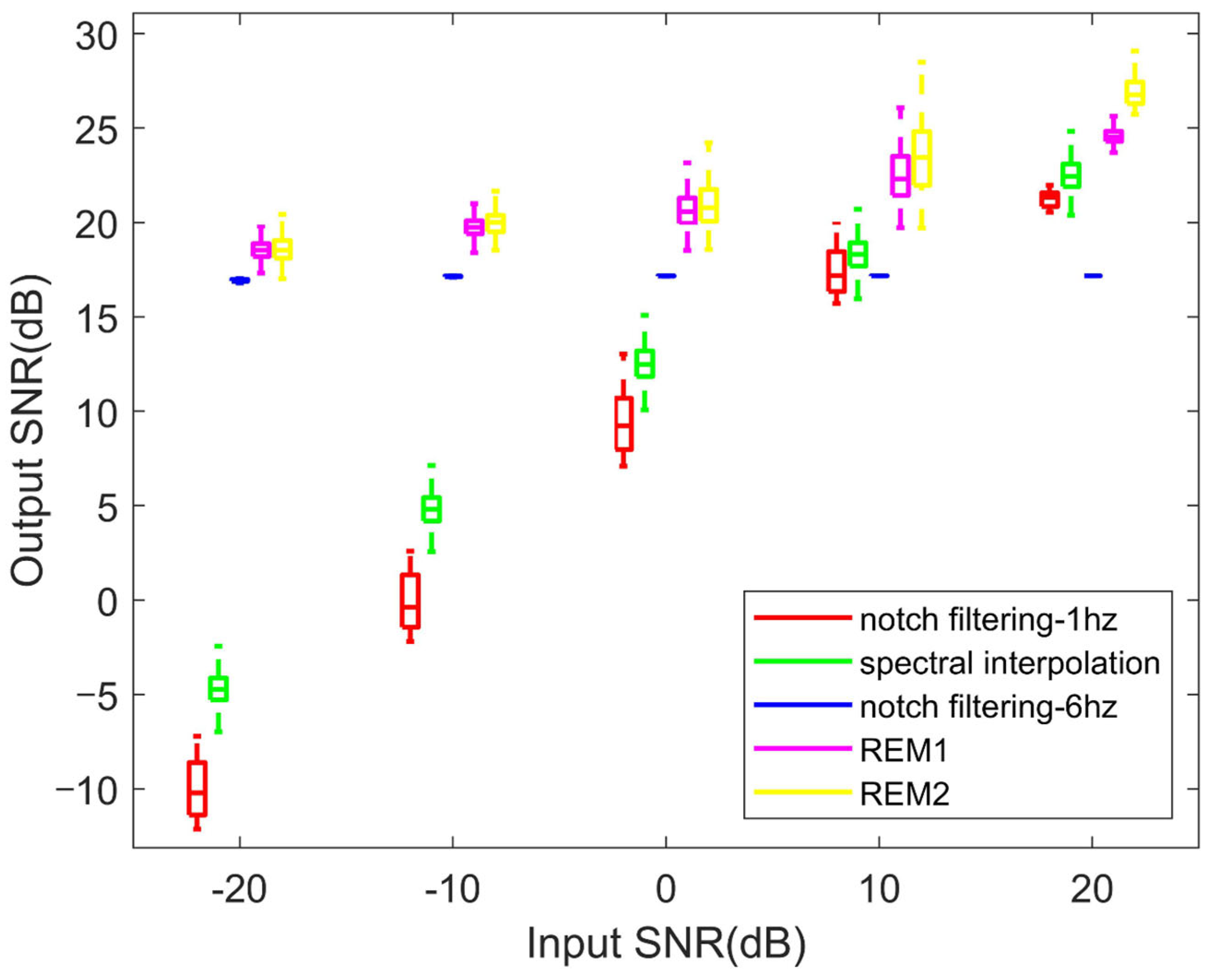
4.2. Performance of the PLI Filters in Simulated Signals
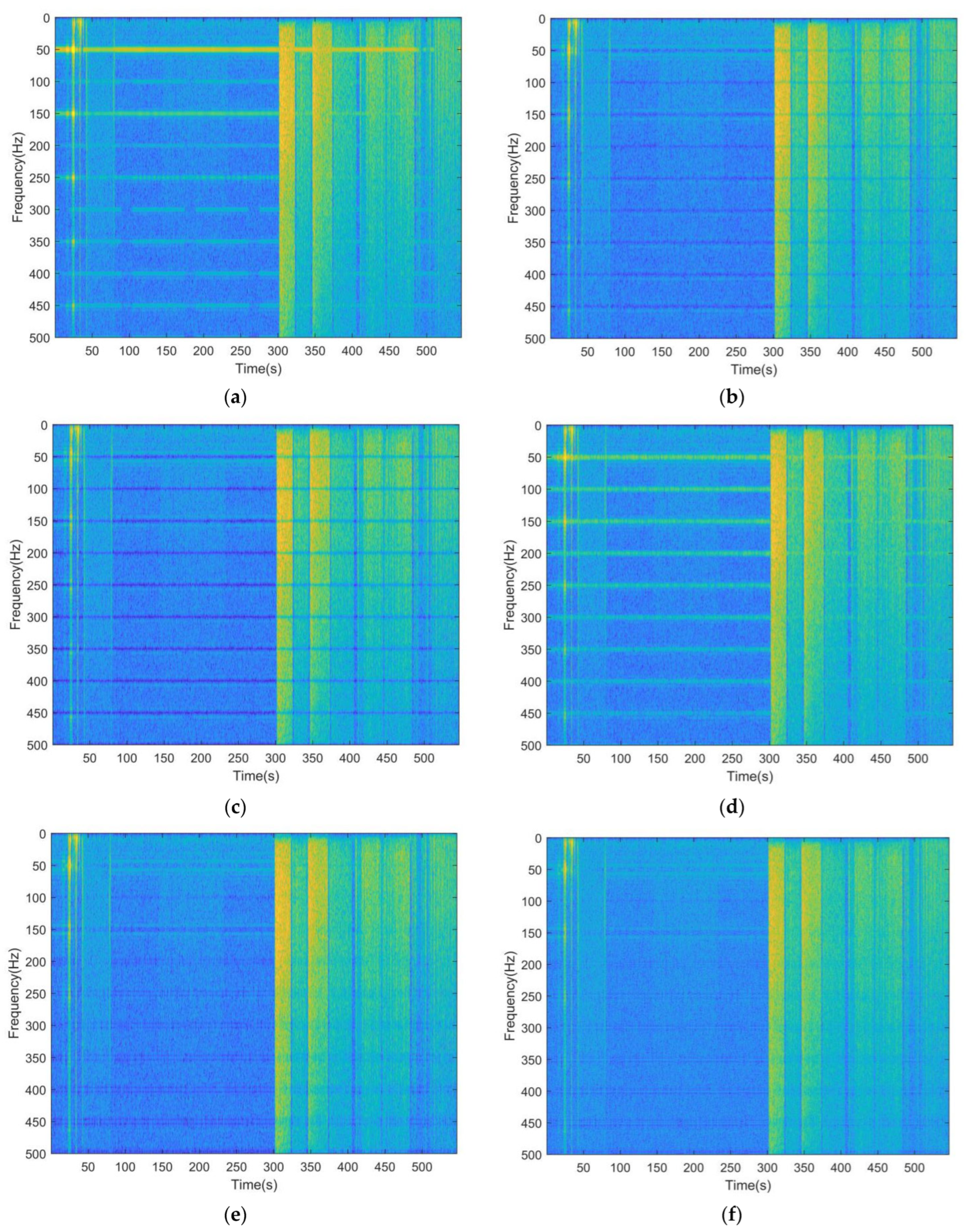
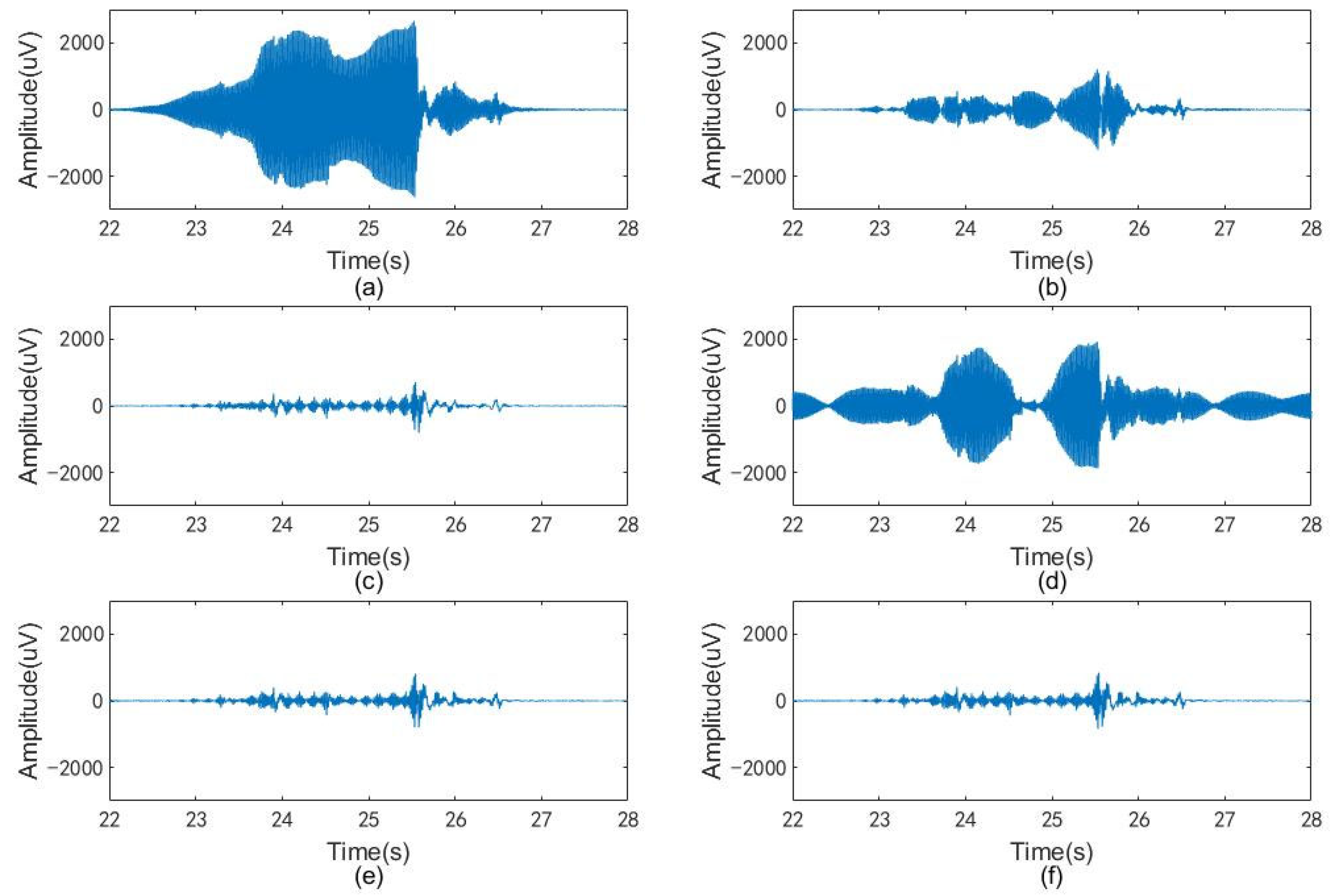
4.3. Performance of the PLI Filters in Real Signals
5. Discussion and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Duan, F.; Dai, L.L.; Chang, W.N.; Chen, Z.Q.; Zhu, C.; Li, W. sEMG-Based Identification of Hand Motion Commands Using Wavelet Neural Network Combined with Discrete Wavelet Transform. IEEE Trans. Ind. Electron. 2016, 63, 1923–1934. [Google Scholar] [CrossRef]
- Qi, J.; Jiang, G.; Li, G.; Sun, Y.; Tao, B. Intelligent Human-Computer Interaction Based on Surface EMG Gesture Recognition. IEEE Access 2019, 7, 61378–61387. [Google Scholar] [CrossRef]
- Liu, H.; Dong, W.; Li, Y.; Li, F.; Lee, C. An epidermal sEMG tattoo-like patch as a new human–machine interface for patients with loss of voice. Microsyst. Nanoeng. 2020, 6, 13. [Google Scholar] [CrossRef] [PubMed]
- Chen, J.C.; Sun, Y.N.; Sun, S.M. Improving Human Activity Recognition Performance by Data Fusion and Feature Engineering. Sensors 2021, 21, 692. [Google Scholar] [CrossRef] [PubMed]
- Luo, X.Y.; Wu, X.Y.; Chen, L.; Zhao, Y.; Zhang, L.; Li, G.L.; Hou, W.S. Synergistic Myoelectrical Activities of Forearm Muscles Improving Robust Recognition of Multi-Fingered Gestures. Sensors 2019, 19, 610. [Google Scholar] [CrossRef]
- Naik, G.R.; Selvan, S.E.; Arjunan, S.P.; Acharyya, A.; Kumar, D.K.; Ramanujam, A.; Nguyen, H.T. An ICA-EBM-Based sEMG Classifier for Recognizing Lower Limb Movements in Individuals with and Without Knee Pathology. IEEE Trans. Neural Syst. Rehabil. Eng. 2018, 26, 675–686. [Google Scholar] [CrossRef]
- Tang, L.; Chen, X.; Cao, S.; Wu, D.; Zhao, G.; Zhang, X. Assessment of Upper Limb Motor Dysfunction for Children with Cerebral Palsy Based on Muscle Synergy Analysis. Front. Hum. Neurosci. 2017, 11, 130. [Google Scholar] [CrossRef] [PubMed]
- Qiang, Z.; Iyer, A.; Kang, K.; Sharma, N. Evaluation of Non-invasive Neuromuscular Measurements and Ankle Joint Effort Prediction Methods for Use in Neurorehabilitation. IEEE Trans. Biomed. Eng. 2020, 68, 1044–1055. [Google Scholar] [CrossRef]
- Nardo, F.D.; Strazza, A.; Mengarelli, A.; Cardarelli, S.; Tigrini, A.; Verdini, F.; Nascimbeni, A.; Agostini, V.; Knaflitz, M.; Fioretti, S. EMG-Based Characterization of Walking Asymmetry in Children with Mild Hemiplegic Cerebral Palsy. Biosensors 2019, 9, 82. [Google Scholar] [CrossRef]
- Cheng, J.; Chen, X.; Shen, M. A Framework for Daily Activity Monitoring and Fall Detection Based on Surface Electromyography and Accelerometer Signals. IEEE J. Biomed. Health Inform. 2013, 17, 38–45. [Google Scholar] [CrossRef]
- Xi, X.; Tang, M.; Miran, S.M.; Luo, Z. Evaluation of Feature Extraction and Recognition for Activity Monitoring and Fall Detection Based on Wearable sEMG Sensors. Sensors 2017, 17, 1229. [Google Scholar] [CrossRef] [PubMed]
- Yu, Y.; Li, H.; Yang, X.; Kong, L.; Luo, X.; Wong, A. An automatic and non-invasive physical fatigue assessment method for construction workers. Autom. Constr. 2019, 103, 1–12. [Google Scholar] [CrossRef]
- Cheung, V.C.K.; Cheung, B.M.F.; Zhang, J.H.; Chan, Z.Y.S.; Ha, S.C.W.; Chen, C.Y.; Cheung, R.T.H. Plasticity of muscle synergies through fractionation and merging during development and training of human runners. Nat. Commun. 2020, 11, 4356. [Google Scholar] [CrossRef] [PubMed]
- Sperlich, B.; Baumgart, C.; Boccia, G.; Vigotsky, A.D.; Halperin, I.; Lehman, G.J.; Trajano, G.S.; Vieira, T.M. Politecnico di Torino Repository Istituzionale Interpreting Signal Amplitudes in Surface Electromyography Studies in Sport and Rehabilitation Sciences, 2018.
- Zhang, B.; Zhou, X.; Luo, D. Muscle Coordination during Archery Shooting: A Comparison of Archers with Different Skill Levels. Eur. J. Sport Sci. 2021, 23, 54–61. [Google Scholar]
- Toledo-Perez, D.C.; Martinez-Prado, M.A.; Gomez-Loenzo, R.A.; Paredes-Garcia, W.J.; Rodriguez-Resendiz, J. A Study of Movement Classification of the Lower Limb Based on up to 4-EMG Channels. Electronics 2019, 8, 259. [Google Scholar] [CrossRef]
- Toledo-Perez, D.C.; Rodriguez-Resendiz, J.; Gomez-Loenzo, R.A.; Jauregui-Correa, J.C. Support Vector Machine-Based EMG Signal Classification Techniques: A Review. Appl. Sci. 2019, 9, 4402. [Google Scholar] [CrossRef]
- Toledo-Perez, D.C.; Rodriguez-Resendiz, J.; Gomez-Loenzo, R.A. A Study of Computing Zero Crossing Methods and an Improved Proposal for EMG Signals. IEEE Access 2020, 8, 8783–8790. [Google Scholar] [CrossRef]
- Aviles, M.; Sanchez-Reyes, L.M.; Fuentes-Aguilar, R.Q.; Toledo-Perez, D.C.; Rodriguez-Resendiz, J. A Novel Methodology for Classifying EMG Movements Based on SVM and Genetic Algorithms. Micromachines 2022, 13, 2108. [Google Scholar] [CrossRef]
- Zhang, Q.; Luo, Z. Wavelet De-Noising of Electromyography. In Proceedings of the IEEE International Conference on Mechatronics & Automation, Luoyang, China, 25–28 June 2006. [Google Scholar]
- Limem, M.; Hamdi, M.A. Uterine electromyography signals denoising using discrete wavelet transform. In Proceedings of the 2015 International Conference on Advances in Biomedical Engineering (ICABME), Beirut, Lebanon, 16–18 September 2015. [Google Scholar]
- Luo, Z.Z.; Shen, H.X. Hermite interpolation-based wavelet transform modulus maxima reconstruction algorithm’s application to EMG de-noising. Dianzi Yu Xinxi Xuebao/J. Electron. Inf. Technol. 2009, 31, 857–860. [Google Scholar]
- Xi, X.; Zhu, H.; Luo, Z. De-noising method of the sEMG based On EEMD and second generation wavelet transform. Chin. J. Sens. Actuators 2012, 25, 1488–1493. [Google Scholar]
- Zhang, X.; Zhou, P. Filtering of surface EMG using ensemble empirical mode decomposition. Med. Eng. Phys. 2013, 35, 537–542. [Google Scholar] [CrossRef]
- Mishra, V.K.; Bajaj, V.; Kumar, A.; Sharma, D.; Singh, G.K. An Efficient Method for Analysis of EMG Signals using Improved Empirical Mode Decomposition. AEU-Int. J. Electron. Commun. 2016, 72, 200–209. [Google Scholar] [CrossRef]
- Ladrova, M.; Martinek, R.; Nedoma, J.; Fajkus, M. Methods of Power Line Interference Elimination in EMG Signal. J. Biomim. Biomater. Biomed. Eng. 2019, 40, 64–70. [Google Scholar] [CrossRef]
- Mewett, D.T.; Nazeran, H.; Reynolds, K.J. Removing power line noise from recorded EMG. In Proceedings of the 2001 Conference Proceedings of the 23rd annual international conference of the IEEE Engineering in Medicine and Biology Society, Istanbul, Turkey, 25–28 October 2001. [Google Scholar]
- Piskorowski, J. Powerline interference rejection from sEMG signal using notch filter with transient suppression. In Proceedings of the 2012 IEEE International Instrumentation and Measurement Technology Conference Proceedings, Graz, Austria, 13–16 May 2012. [Google Scholar]
- Gokcesu, K.; Ergeneci, M.; Ertan, E.; Gokcesu, H. An Adaptive Algorithm for Online Interference Cancellation in EMG Sensors. Sens. J. IEEE 2019, 19, 214–223. [Google Scholar] [CrossRef]
- Mewett, D.T.; Reynolds, K.J.; Nazeran, H. Reducing power line interference in digitised electromyogram recordings by spectrum interpolation. Med. Biol. Eng. Comput. J. Int. Fed. Med. Biol. Eng. 2004, 42, 524–531. [Google Scholar] [CrossRef] [PubMed]
- Akbary, P.; Rabbani, H. Removing Power Line Interference and ECG signal from EMG signal using Matching Pursuit. In Proceedings of the IEEE 10th International Conference on Signal Processing Proceedings, Beijing, China, 24–28 October 2010. [Google Scholar]
- Pang, B.; Tang, G.; Tian, T. Enhanced Singular Spectrum Decomposition and Its Application to Rolling Bearing Fault Diagnosis. IEEE Access 2019, 7, 87769–87782. [Google Scholar] [CrossRef]
- Li, Y.; Han, Z.; Wang, Z. Research on a Signal Separation Method Based on Vold-Kalman Filter of Improved Adaptive Instantaneous Frequency Estimation. IEEE Access 2020, 8, 112170–112189. [Google Scholar] [CrossRef]
- Chen, X.; Chen, H.; Fang, Y.; Hu, Y. High-Order Synchroextracting Time-Frequency Analysis and Its Application in Seismic Hydrocarbon Reservoir Identification. IEEE Geosci. Remote Sens. Lett. 2020, 18, 1–5. [Google Scholar] [CrossRef]
- Mousavi, S.M.; Langston, C.A. Automatic noise-removal/signal-removal based on general cross-validation thresholding in synchrosqueezed domain and its application on earthquake data. Geophysics 2017, 82, 1–58. [Google Scholar] [CrossRef]
- Estevez, P.G.; Marchi, P.; Galarza, C.; Elizondo, M. Non-Stationary Power System Forced Oscillation Analysis Using Synchrosqueezing Transform. IEEE Trans. Power Syst. 2021, 36, 1583–1593. [Google Scholar] [CrossRef]
- Chui, C.K.; Jiang, Q.; Li, L.; Lu, J. Signal separation based on adaptive continuous wavelet transform and analysis. Appl. Comput. Harmon. Anal. 2021, 53, 151–179. [Google Scholar] [CrossRef]
- Sharma, T.; Sharma, K.K. Power line interference removal from ECG signals using wavelet transform based component-retrieval. In Proceedings of the International Conference on Advances in Computing, Jaipur, India, 21–24 September 2016. [Google Scholar]
- Meignen, S.; Oberlin, T.; Mclaughlin, S. A New Algorithm for Multicomponent Signals Analysis Based on SynchroSqueezing: With an Application to Signal Sampling and Denoising. IEEE Trans. Signal Process. 2012, 60, 5787–5798. [Google Scholar] [CrossRef]
- Zivanovic, M.; Niegowski, M.; Lecumberri, P.; Gómez, M. A low-rank matrix factorization approach for joint harmonic and baseline noise suppression in biopotential signals. Comput. Methods Programs Biomed. 2017, 141, 59–71. [Google Scholar] [CrossRef]
- Wang, J.; Du, G.F.; Zhu, Z.K.; Shen, C.Q.; He, Q.B. Fault diagnosis of rotating machines based on the EMD manifold. Mech. Syst. Signal Process. 2020, 135, 106443. [Google Scholar] [CrossRef]
- Meng, E.H.; Huang, S.Z.; Huang, Q.; Fang, W.; Wu, L.Z.; Wang, L. A robust method for non-stationary streamflow prediction based on improved EMD-SVM model. J. Hydrol. 2019, 568, 462–478. [Google Scholar] [CrossRef]
- Ji, N.; Ma, L.; Dong, H.; Zhang, X.J. EEG Signals Feature Extraction Based on DWT and EMD Combined with Approximate Entropy. Brain Sci. 2019, 9, 201. [Google Scholar] [CrossRef] [PubMed]
- Karpinski, R.; Krakowski, P.; Jonak, J.; Machrowska, A.; Maciejewski, M.; Nogalski, A. Diagnostics of Articular Cartilage Damage Based on Generated Acoustic Signals Using ANN-Part II: Patellofemoral Joint. Sensors 2022, 22, 3765. [Google Scholar] [CrossRef] [PubMed]
- Karpinski, R.; Krakowski, P.; Jonak, J.; Machrowska, A.; Maciejewski, M.; Nogalski, A. Diagnostics of Articular Cartilage Damage Based on Generated Acoustic Signals Using ANN-Part I: Femoral-Tibial Joint. Sensors 2022, 22, 2176. [Google Scholar] [CrossRef]
- Xiao, F.Y.; Yang, D.C.; Guo, X.H.; Wang, Y. VMD-based denoising methods for surface electromyography signals. J. Neural Eng. 2019, 16, 056017. [Google Scholar] [CrossRef]
- Thakur, G.; Brevdo, E.; Fukar, N.S.; Wu, H.T. The Synchrosqueezing algorithm for time-varying spectral analysis: Robustness properties and new paleoclimate applications. Signal Process. 2013, 93, 1079–1094. [Google Scholar] [CrossRef]
- Karlsson, S.; Yu, J. Estimation of surface electromyogram spectral alteration using reduced-order autoregressive model. Med. Biol. Eng. Comput. 2000, 38, 520–527. [Google Scholar] [CrossRef] [PubMed]
- Hermens, H.J.; Freriks, B.; Merletti, R.; Stegeman, D.; Hgg, G. Standards for surface electromyography: The European Project Surface EMG for Non-invasive Assessment of Muscles (SENIAM). Enschede Roessingh Res. Dev. 1999, 10, 8–12. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | The Value Range of the Parameter |
|---|---|
| [4, 5, 6, 7, 8] | |
| [0.2, 0.3, 0.4, 0.5] | |
| [0.1, 0.2, 0.33, 0.5, 0.75, 1] |
| Input SNR of the Simulated Signal | −20 dB | −10 dB | 0 dB | 10 dB | 20 dB |
|---|---|---|---|---|---|
| Notch filtering with 1 Hz bandwidth [26,27,28] | −9.98 ± 1.54 | −0.13 ± 1.48 | 9.43 ± 1.61 | 17.42 ± 1.20 | 21.24 ± 0.39 |
| Spectral interpolation [27,30] | −4.71 ± 0.93 | 4.85 ± 0.95 | 12.53 ± 0.98 | 18.37 ± 0.95 | 22.50 ± 0.95 |
| Notch filtering with 6 Hz bandwidth [26,27,28] | 16.93 ± 0.56 | 17.14 ± 0.02 | 17.16 ± 0.05 | 17.17 ± 0.02 | 17.17 ± 0.00 |
| REM1 | 18.53 ± 0.49 | 19.74 ± 0.52 | 20.62 ± 0.95 | 22.51 ± 1.40 | 24.57 ± 0.73 |
| REM2 | 18.57 ± 0.64 | 19.98 ± 0.67 | 20.98 ± 1.30 | 23.47 ± 1.79 | 26.92 ± 0.77 |
| Input SNR of the Simulated Signal | −20 dB | −10 dB | 0 dB | 10 dB | 20 dB |
|---|---|---|---|---|---|
| Without filtering | 0.19 ± 0.02 | 0.53 ± 0.01 | 0.89 ± 0.00 | 0.97 ± 0.00 | 0.97 ± 0.00 |
| Notch filtering with 1 Hz bandwidth [26,27,28] | 0.29 ± 0.05 | 0.69 ± 0.06 | 0.93 ± 0.02 | 0.98 ± 0.00 | 0.99 ± 0.00 |
| Spectral interpolation [27,30] | 0.50 ± 0.04 | 0.87 ± 0.02 | 0.97 ± 0.01 | 0.99 ± 0.00 | 0.99 ± 0.00 |
| Notch filtering with 6 Hz bandwidth [26,27,28] | 0.95 ± 0.00 | 0.97 ± 0.00 | 0.98 ± 0.00 | 0.98 ± 0.00 | 0.98 ± 0.00 |
| REM1 | 0.99 ± 0.00 | 0.99 ± 0.00 | 0.99 ± 0.00 | 1.00 ± 0.00 | 1.00 ± 0.00 |
| REM2 | 0.99 ± 0.00 | 0.99 ± 0.00 | 0.99 ± 0.00 | 1.00 ± 0.00 | 1.00 ± 0.00 |
| Input SNR of the Simulated Signal | −20 dB | −10 dB | 0 dB | 10 dB | 20 dB |
|---|---|---|---|---|---|
| Without filtering | 3646 ± 1 | 1153 ± 0 | 365 ± 0 | 11 ± 0 | 54 ± 0 |
| Notch filtering with 1 Hz bandwidth [26,27,28] | 2131 ± 369 | 685 ± 113 | 229 ± 41 | 90 ± 12 | 58 ± 3 |
| Spectral interpolation [27,30] | 1152 ± 123 | 383 ± 41 | 158 ± 18 | 81 ± 9 | 50 ± 5 |
| Notch filtering with 6 Hz bandwidth [26,27,28] | 95 ± 1 | 93 ± 0 | 92 ± 0 | 92 ± 0 | 92 ± 0 |
| REM1 | 85 ± 5 | 72 ± 4 | 60 ± 7 | 47 ± 8 | 34 ± 2 |
| REM2 | 83 ± 6 | 70 ± 5 | 57 ± 9 | 41 ± 8 | 24 ± 3 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, J.; Sun, Y.; Sun, S.; Yao, Z. Reducing Power Line Interference from sEMG Signals Based on Synchrosqueezed Wavelet Transform. Sensors 2023, 23, 5182. https://doi.org/10.3390/s23115182
Chen J, Sun Y, Sun S, Yao Z. Reducing Power Line Interference from sEMG Signals Based on Synchrosqueezed Wavelet Transform. Sensors. 2023; 23(11):5182. https://doi.org/10.3390/s23115182
Chicago/Turabian StyleChen, Jingcheng, Yining Sun, Shaoming Sun, and Zhiming Yao. 2023. "Reducing Power Line Interference from sEMG Signals Based on Synchrosqueezed Wavelet Transform" Sensors 23, no. 11: 5182. https://doi.org/10.3390/s23115182
APA StyleChen, J., Sun, Y., Sun, S., & Yao, Z. (2023). Reducing Power Line Interference from sEMG Signals Based on Synchrosqueezed Wavelet Transform. Sensors, 23(11), 5182. https://doi.org/10.3390/s23115182