

Hardware-Efficient Scheme for Trailer Robot Parking by Truck Robot in an Indoor Environment with Rendezvous
 , , ,
, , ,
Abstract
1. Introduction
- A new behavioral control mechanism was developed with a rendezvous approach to perform parking by using a trailer robot with mimic methods.
- The proposed hardware scheme is for the parking of a trailer robot under the leadership of an FPGA-based truck robot.
- Slot identification by the leader (truck) robot which communicates it to the follower (trailer).
2. Hardware-Scheme-Based Algorithm for Trailer Robot Parking
2.1. Methodology of Trailer Robot Parking
2.1.1. Behavioral Control between Truck and Trailer Robots with Rendezvous
2.1.2. Hitch and Side-Slip Angle of Trailer Robot Evaluated by Truck Robot
| Algorithm 1: Pseudocode for rendezvous behavioral control between truck and trailer |
| 1. Initialize, dmin_ ϑ {0,15,30,45,60,75,90,135}, 2. Case (state) 3. Bhv1: ((SLB, ILBL, ILBR) && (SFF, IFFL, IFFR) @ dmin_ϑ0 0)? Bhv4: Bhv2 4. Bhv2: if ((SLB, ILBR) > dmin_ϑ0 0& ((SFF, IFFL) < dmin_ϑ0 0& IFFR > dmin_ϑ0 0) & (SLL = dmin_ (−ϑ90 0))) {TL wait, TF rotate @ left_ϑ15 0} Else {TL wait, TF rotate @ right_ϑ15 0} 5. Bhv3: (SLL = dmin_(−ϑ75 0, −ϑ60 0, −ϑ45 0)) ? {TL wait, TF @ left_ϑ30 0, ϑ45 0, ϑ60 0}: {TL wait, TF @ right_ ϑ30 0, ϑ45 0, ϑ60 0} 6. Bhv4: If ((SLB && SFF) @ dmin_ϑ0 0) && ((SFF) @ frequency)) {TL& TF forward @ dmin} Else {TL forward@ TF frequency} 7. end case |
2.1.3. Velocity Movement Control between Truck and Trailer Robots
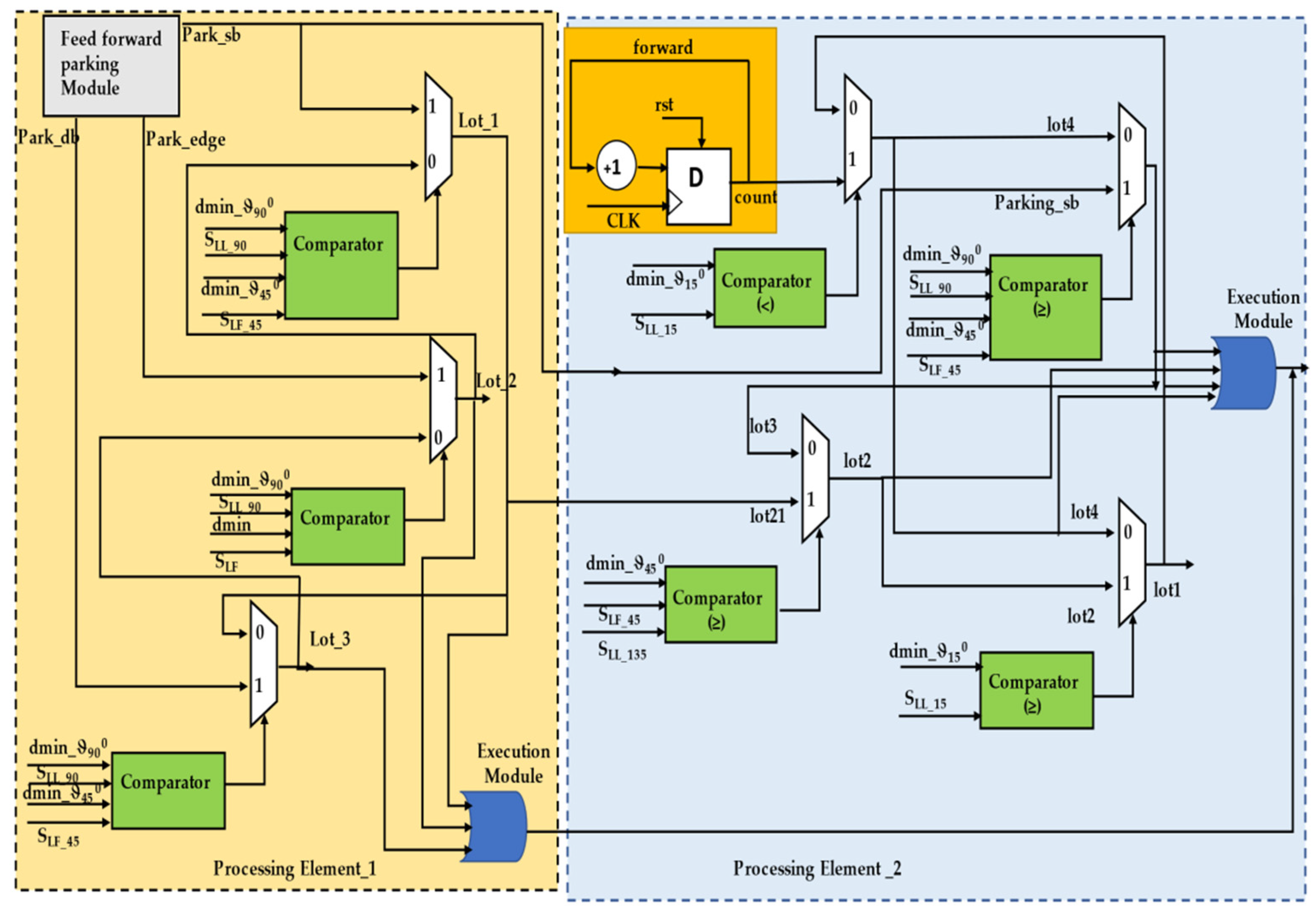
2.1.4. Parking Slot Identification with Sensory Information
| Algorithm 2: Pseudocode for parking slot identification by truck robot |
| 1. Initialize, dmin_ ϑ {0,15,30,45,60,75}, 2. Case (state) 3. lot1: (SLL_15 ≥ dmin_ϑ15 0)? Lot2: lot4 4. lot2: ((SLL_135 ≥ dmin_ϑ45 0) && (SLF_(45) ≥ dmin_ϑ45 0)) ? lot21: lot3 5. Case (lot21) 6. Lot_1: ((SLL_90 ≥ dmin_ϑ90 0) && (SLF_45 ≥ dmin_ϑ45 0))? Park_sb: Lot_2 7. Lot_2: ((SLL_90 ≥ dmin_ϑ90 0) && (SLF<dmin))? Park_edge: Lot_3 8. Lot_3: ((SLL_90 ≥ dmin_ϑ90 0) && (SLF_45 = dmin_ϑ45 0))? Park_db: Lot_1 9. end case 10. lot3: ((SLL_90 ≥ dmin_ϑ90 0) && (SLF_ (45) ≥ dmin_ϑ45 0))? Park_sb: lot4 11. lot4: (SLL_15< dmin_ϑ15 0)? Forward: lot1 12. end case |
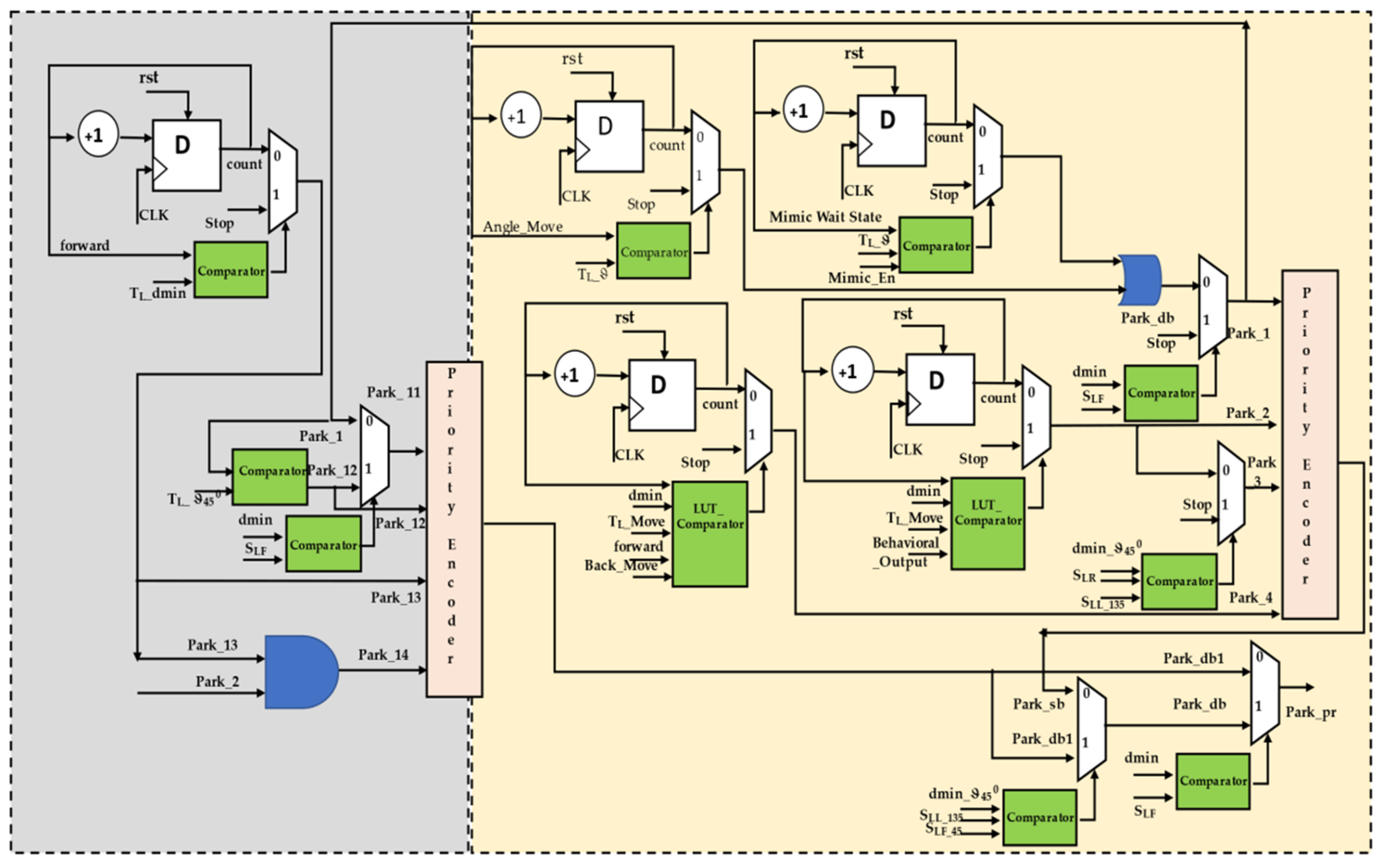
2.1.5. Parking of Truck–Trailer Robot with the Mimic Method
| Algorithm 3: Pseudocode for parking by truck–trailer robot |
|
2.2. Hardware Schemes for Trailer Parking by Truck Robot
3. Results
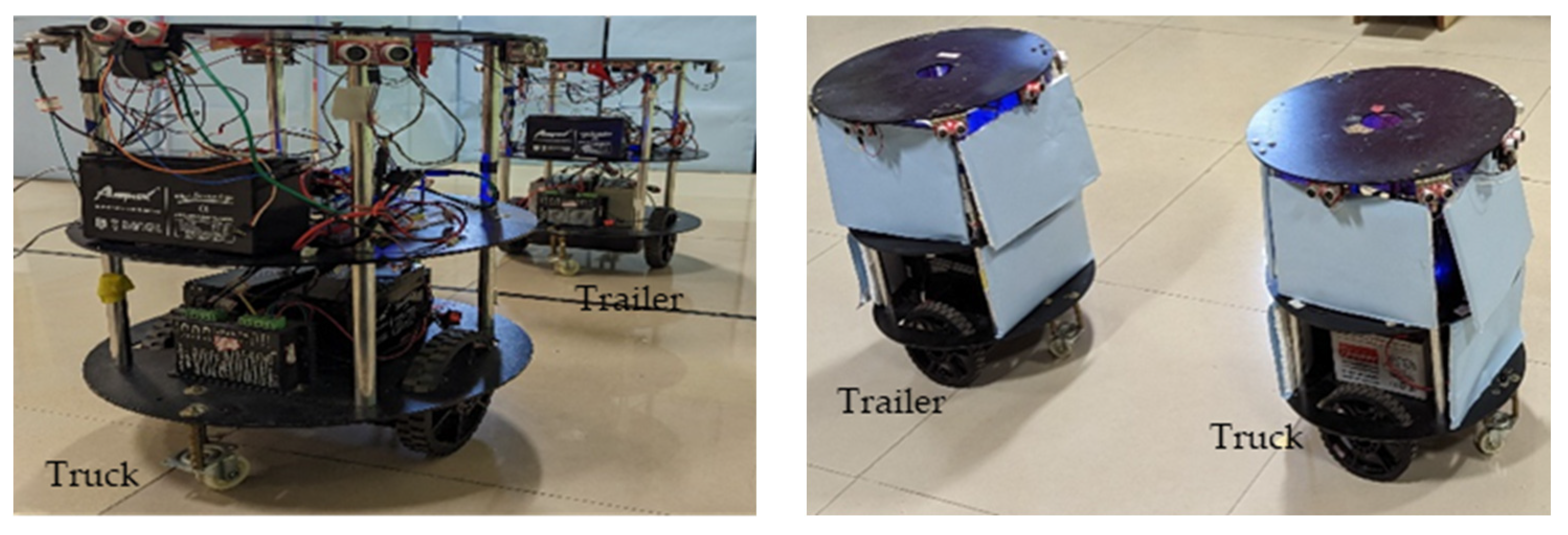
3.1. Experimental Setup
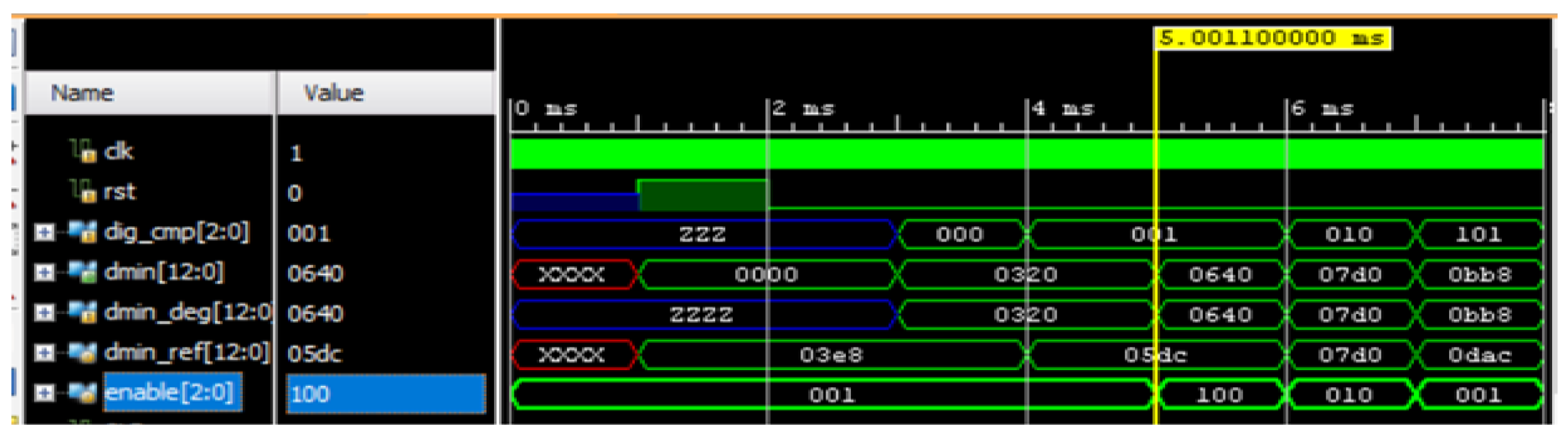
Simulation Results of Behavioral Control between Truck and Trailer Robots with Rendezvous
3.2. Experimental Results
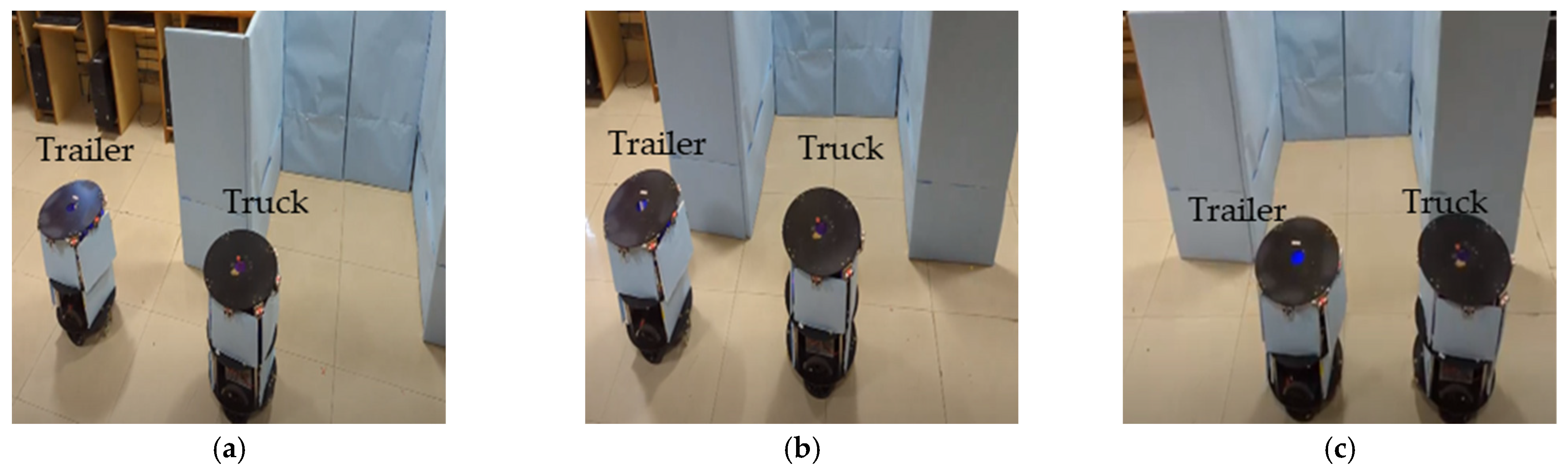
3.2.1. Parking Slot Identification by Truck Robot with Behavioral Control Mechanism
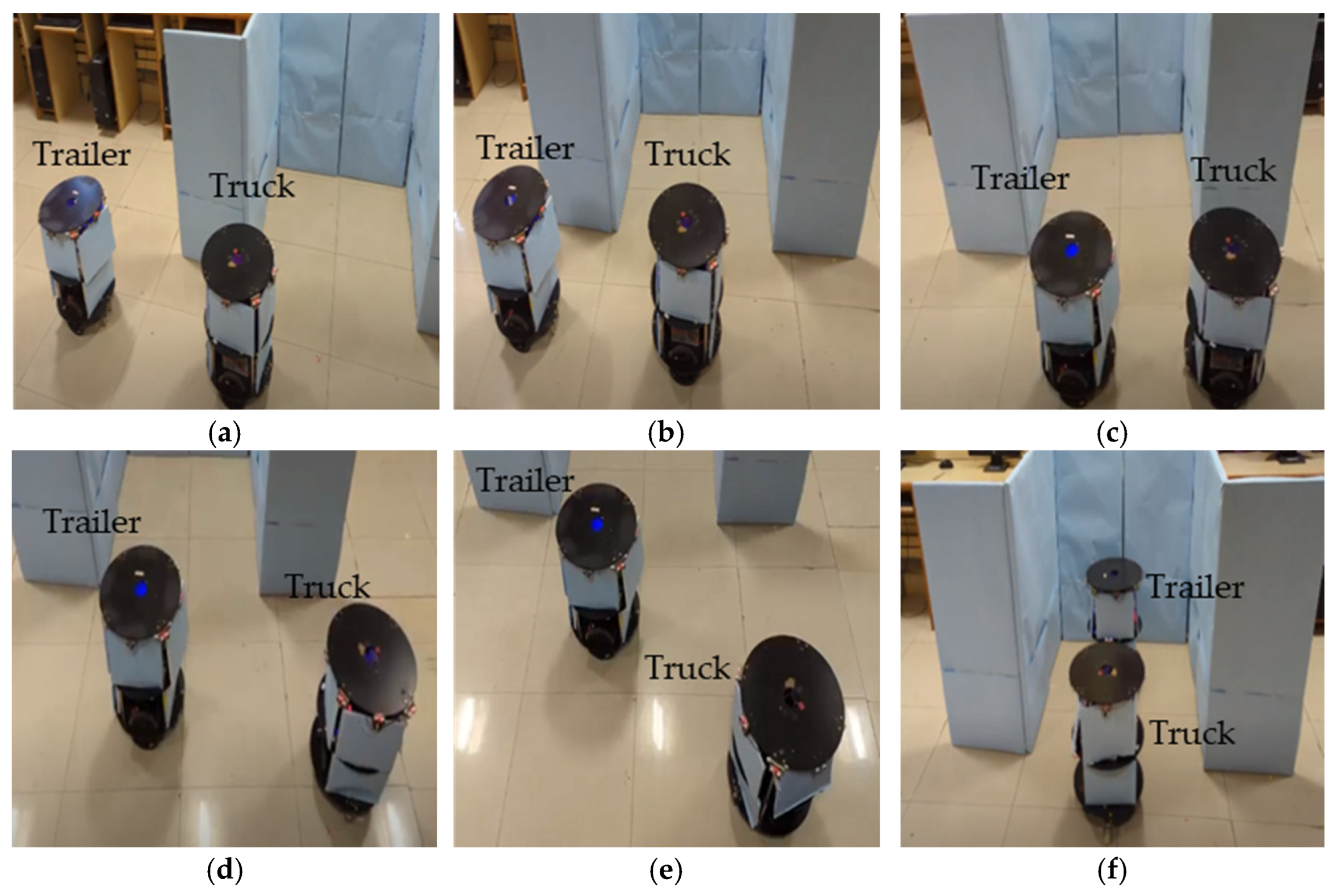
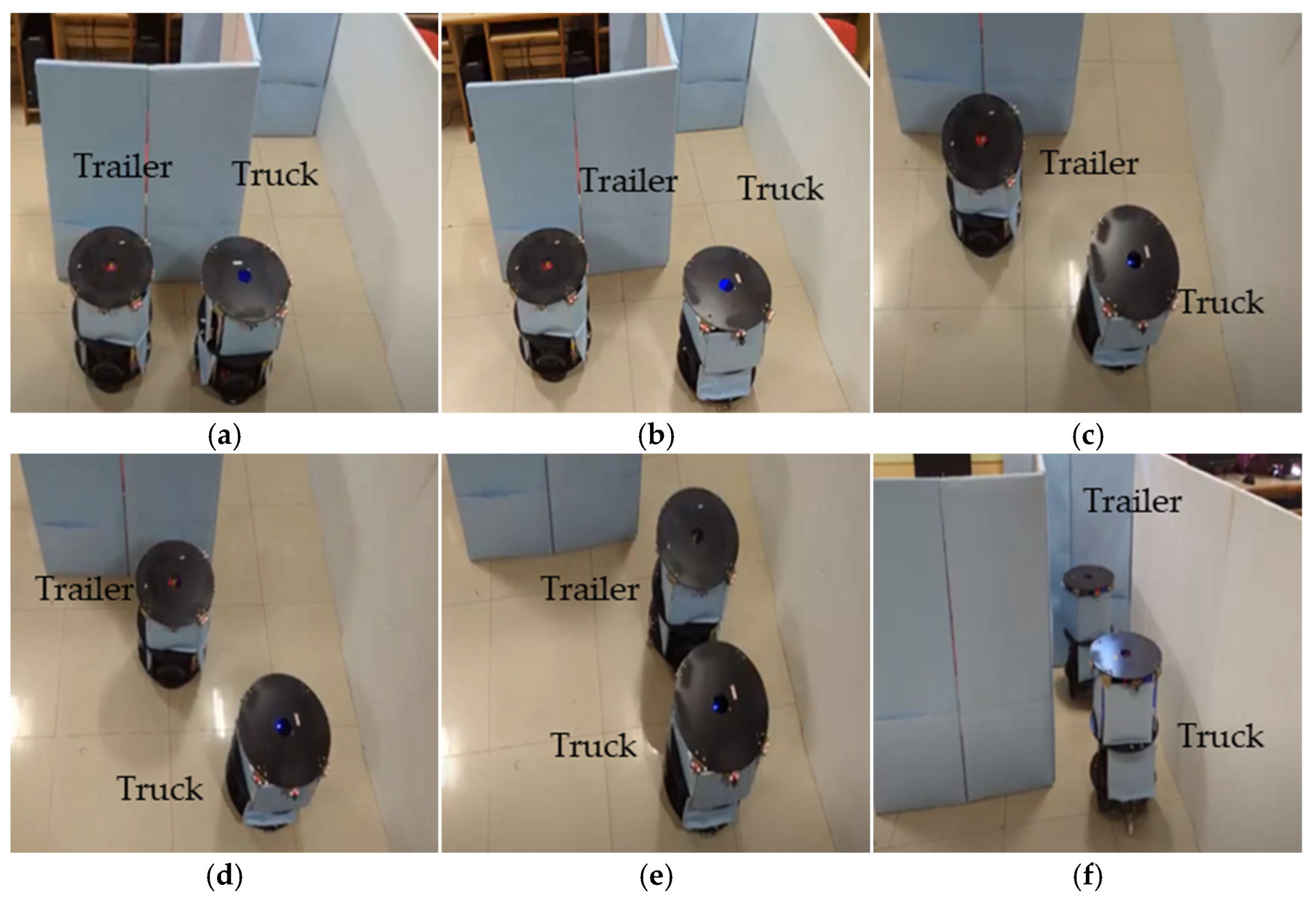
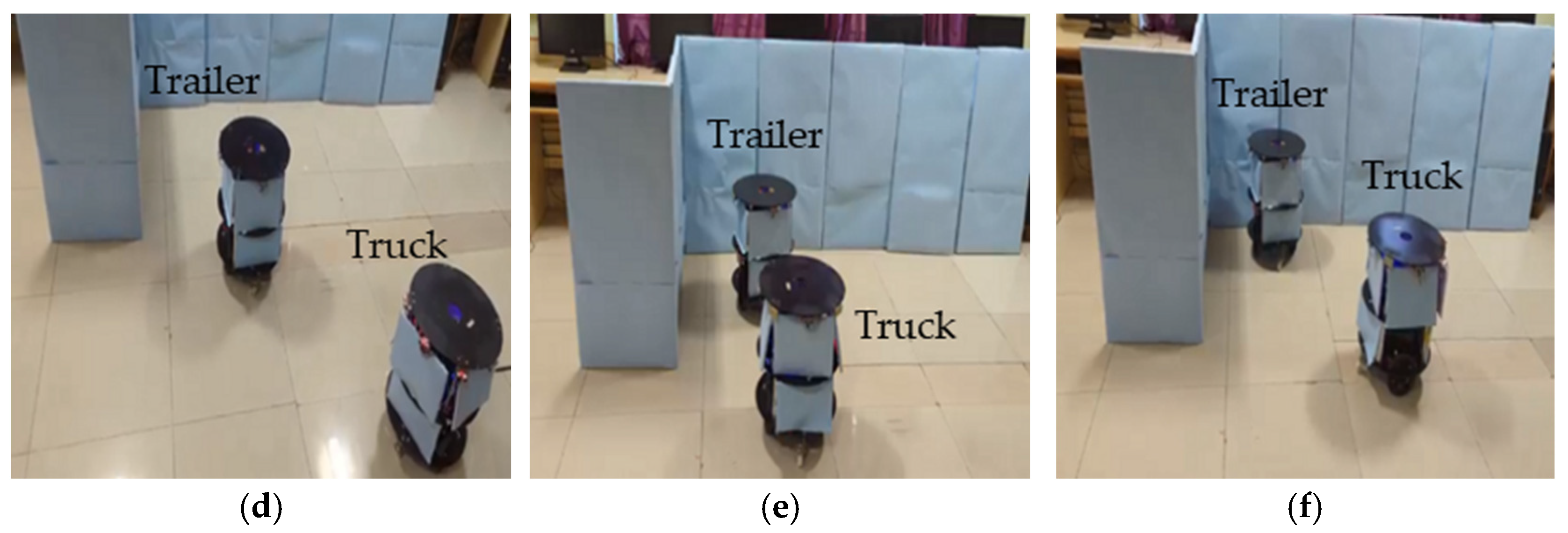
3.2.2. Trailer Robot Parking with Mimic Method
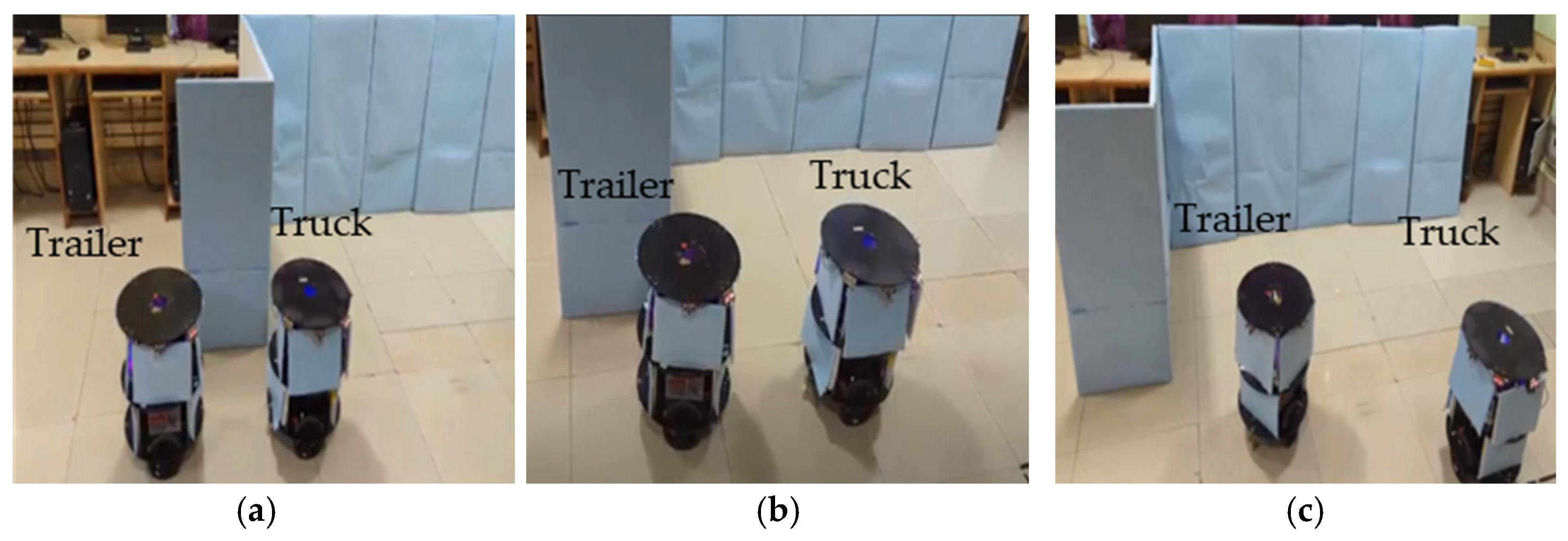
3.2.3. Trailer Robot Parking in Single-Boundary Conditions
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| Abbreviation | Expansion |
| dmin_ϑ | Minimum distance of the sensor. |
| SLB_ ϑ | Back sensor of leader (Truck) robot at an angle of ϑ. |
| ILBL_ ϑ | Left corner IR sensor in Back side of Leader (Truck) robot at an angle of ϑ. |
| ILBR_ ϑ | Right corner IR sensor in Back side of Leader (Truck) robot at an angle of ϑ. |
| SFF_ ϑ | Front sensor of Follower (Trailer) robot at an angle of ϑ. |
| IFFL_ ϑ | Left corner IR sensor in Front side of Follower (Trailer) robot at an angle of ϑ. |
| IFFR_ ϑ | Right corner IR sensor in Front side of Follower (Trailer) robot at an angle of ϑ. |
| TL_ ϑ | Truck Robot (Leader) at an angle of ϑ. |
| TF _ ϑ | Trailer Robot (Follower) at an angle of ϑ. |
| SLF_ ϑ | Front sensor of leader (Truck) robot at an angle of ϑ. |
| SLL_ ϑ | Left sensor of leader (Truck) robot at an angle of ϑ. |
| SLR_ ϑ | Right sensor of leader (Truck) robot at an angle of ϑ. |
References
- Freight Transportation Forecast. 2017. Available online: http://www.atabusinesssolutions.com/ (accessed on 12 September 2022).
- Lai, A.H.S.; Fung, G.S.K.; Yung, N.H.C. Vehicle type classification from visual-based dimension estimation. In Proceedings of the 2001 IEEE Intelligent Transportation Systems, Oakland, CA, USA, 25–29 August 2001; pp. 201–206. [Google Scholar]
- Liu, S.; Wan, Z.; Yu, B.; Wang, Y. Robotic Computing on FPGAs. In Synthesis Lectures on Computer Architecture; Morgan & Claypool: San Rafael, CA, USA, 2009. [Google Scholar]
- Vital, F.; Ioannou, P.; Gupta, A. Survey on Intelligent Truck Parking: Issues and Approaches. IEEE Intell. Transp. Syst. Mag. 2021, 13, 31–44. [Google Scholar] [CrossRef]
- He, P.; Wu, A.; Huang, X.; Scott, J.; Rangarajan, A.; Ranka, S. Truck and Trailer Classification with Deep Learning Based Geometric Features. IEEE Trans. Intell. Transp. Syst. 2020, 22, 7782–7791. [Google Scholar] [CrossRef]
- Manav, A.C.; Lazoglu, I. A Novel Cascade Path Planning Algorithm for Autonomous Truck-Trailer Parking. IEEE Trans. Intell. Transp. Syst. 2022, 23, 6821–6835. [Google Scholar] [CrossRef]
- Lin, T.; Rivano, H.; Le Mouël, F. A Survey of Smart Parking Solutions. IEEE Trans. Intell. Transp. Syst. 2017, 18, 3229–3253. [Google Scholar] [CrossRef]
- Huang, Y.; Zhao, J.; He, X.; Zhang, S.; Feng, T. Vision-based Semantic Mapping and Localization for Autonomous Indoor Parking. In Proceedings of the 2018 IEEE Intelligent Vehicles Symposium (IV), Changshu, China, 26–30 June 2018; pp. 636–641. [Google Scholar]
- Josef, V. Trailer parking assistant. In Proceedings of the 16th International Conference on Mechatronics—Mechatronika 2014, Brno, Czech Republic, 3–5 December 2014; pp. 677–682. [Google Scholar]
- Kong, R. Accurate parking planning of Tractor-Trailer-Trailer mobile robot. In Proceedings of the 2012 IEEE International Conference on Mechatronics and Automation, Chengdu, China, 5–8 August 2012; pp. 1220–1226. [Google Scholar]
- Cook, D.J.; Morris, T.; Morellas, V.; Papanikolopoulos, N. An automated system for persistent real-time truck parking detection and information dissemination. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; pp. 3989–3994. [Google Scholar]
- Available online: https://www.databridgemarketresearch.com/reports/global-indoor-robots-market (accessed on 22 October 2022).
- Kim, W.; Jung, I. Smart Parking Lot Based on Edge Cluster Computing for Full Self-Driving Vehicles. IEEE Access 2022, 10, 115271–115281. [Google Scholar] [CrossRef]
- Banzhaf, H.; Nienhüser, D.; Knoop, S.; Zöllner, J.M. The future of parking: A survey on automated valet parking with an outlook on high density parking. In Proceedings of the 2017 IEEE Intelligent Vehicles Symposium (IV), Los Angeles, CA, USA, 11–14 June 2017; pp. 1827–1834. [Google Scholar]
- Fulman, N.; Benenson, I. Establishing Heterogeneous Parking Prices for Uniform Parking Availability for Autonomous and Human-Driven Vehicles. IEEE Intell. Transp. Syst. Mag. 2019, 11, 15–28. [Google Scholar] [CrossRef]
- Hayajneh, M.; Al Mahasneh, A. Guidance, Navigation and Control System for Multi-Robot Network in Monitoring and Inspection Operations. Drones 2022, 6, 332. [Google Scholar] [CrossRef]
- Ozsoyeller, D.; Tokekar, P. Multi-Robot Symmetric Rendezvous Search on the Line. IEEE Robot. Autom. Lett. 2022, 7, 334–341. [Google Scholar] [CrossRef]
- Mathew, N.; Smith, S.L.; Waslander, S.L. Multirobot Rendezvous Planning for Recharging in Persistent Tasks. IEEE Trans. Robot. 2015, 31, 128–142. [Google Scholar] [CrossRef]
- Chinnaiah, M.C.; Savitri, T.S.; Kumar, P.R. A novel approach in navigation of FPGA robots in robust indoor environment. In Proceedings of the 2015 International Conference on Advanced Robotics and Intelligent Systems (ARIS), Taipei, Taiwan, 29–31 May 2015; pp. 1–6. [Google Scholar]
- Yu, J.; Xu, Z.; Zeng, S.; Yu, C.; Qiu, J.; Shen, Z.; Xu, Y.; Dai, G.; Wang, Y.; Yang, H. INCAME: Interruptible CNN Accelerator for Multirobot Exploration. IEEE Trans. Comput.-Aided Des. Integr. Circuits Syst. 2022, 41, 964–978. [Google Scholar] [CrossRef]
- Huang, C.C.; Lin, C.L.; Kao, J.J.; Chang, J.J.; Sheu, G.J. Vehicle Parking Guidance for Wireless Charge Using GMR Sensors. IEEE Trans. Veh. Technol. 2018, 67, 6882–6894. [Google Scholar] [CrossRef]
- Naji, B.; Abdelmoula, C.; Masmoudi, M. A Real Time Algorithm for Versatile Mode Parking System and Its Implementation on FPGA Board. Appl. Sci. 2022, 12, 655. [Google Scholar] [CrossRef]
- Wan, Z.; Lele, A.; Yu, B.; Liu, S.; Wang, Y.; Reddi, V.J.; Hao, C.; Raychowdhury, A. Robotic Computing on FPGAs: Current Progress, Research Challenges, and Opportunities. In Proceedings of the 2022 IEEE 4th International Conference on Artificial Intelligence Circuits and Systems (AICAS), Incheon, Republic of Korea, 13–15 June 2022; pp. 291–295. [Google Scholar]
- Wan, Z.; Yu, B.; Li, T.Y.; Tang, J.; Zhu, Y.; Wang, Y.; Raychowdhury, A.; Liu, S. A Survey of FPGA-Based Robotic Computing. IEEE Circuits Syst. Mag. 2022, 21, 48–74. [Google Scholar] [CrossRef]
- Vyas, P.; Vachhani, L.; Sridharan, K.; Pudi, V. CORDIC-Based Azimuth Calculation and Obstacle Tracing via Optimal Sensor Placement on a Mobile Robot. IEEE/ASME Trans. Mechatron. 2016, 21, 2317–2329. [Google Scholar] [CrossRef]
- Divya Vani, G.; Rao, K.S.; Chinnaiah, M.C. Self-automated parking with FPGA-based robot. In Micro and Nanoelectronics Devices, Circuits and Systems; Springer: Singapore, 2022; pp. 459–470. [Google Scholar]
- Liu, S.; Gaudiot, J.L. Autonomous vehicles lite self-driving technologies should start small, go slow. IEEE Spectr. 2020, 57, 36–49. [Google Scholar] [CrossRef]
- Shene, T.N.; Sridharan, K.; Sudha, N. Real-Time SURF-Based Video Stabilization System for an FPGA-Driven Mobile Robot. IEEE Trans. Ind. Electron. 2016, 63, 5012–5021. [Google Scholar] [CrossRef]
- Tran, P.; Pham, T.H.; Lam, S.K.; Wu, M.; Jasani, B.A. Stream-Based ORB Feature Extractor with Dynamic Power Optimization. In Proceedings of the 2018 International Conference on Field-Programmable Technology (FPT), Naha, Japan, 10–14 December 2018; pp. 94–101. [Google Scholar]
- Li, B.; Yang, L.; Xiao, J.; Valde, R.; Wrenn, M.; Leflar, J. Collaborative Mapping and Autonomous Parking for Multi-Story Parking Garage. IEEE Trans. Intell. Transp. Syst. 2018, 19, 1629–1639. [Google Scholar] [CrossRef]
- Zhang, J.; Chen, H.; Song, S.; Hu, F. Reinforcement Learning-Based Motion Planning for Automatic Parking System. IEEE Access 2020, 8, 154485–154501. [Google Scholar] [CrossRef]
- Han, J.; Kim, J.; Shim, D.H. Precise Localization and Mapping in Indoor Parking Structures via Parameterized SLAM. IEEE Trans. Intell. Transp. Syst. 2019, 20, 4415–4426. [Google Scholar] [CrossRef]
- Li, B.; Acarman, T.; Zhang, Y.; Ouyang, Y.; Yaman, C.; Kong, Q.; Zhong, X.; Peng, X. Optimization-Based Trajectory Planning for Autonomous Parking with Irregularly Placed Obstacles: A Lightweight Iterative Framework. IEEE Trans. Intell. Transp. Syst. 2022, 23, 11970–11981. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
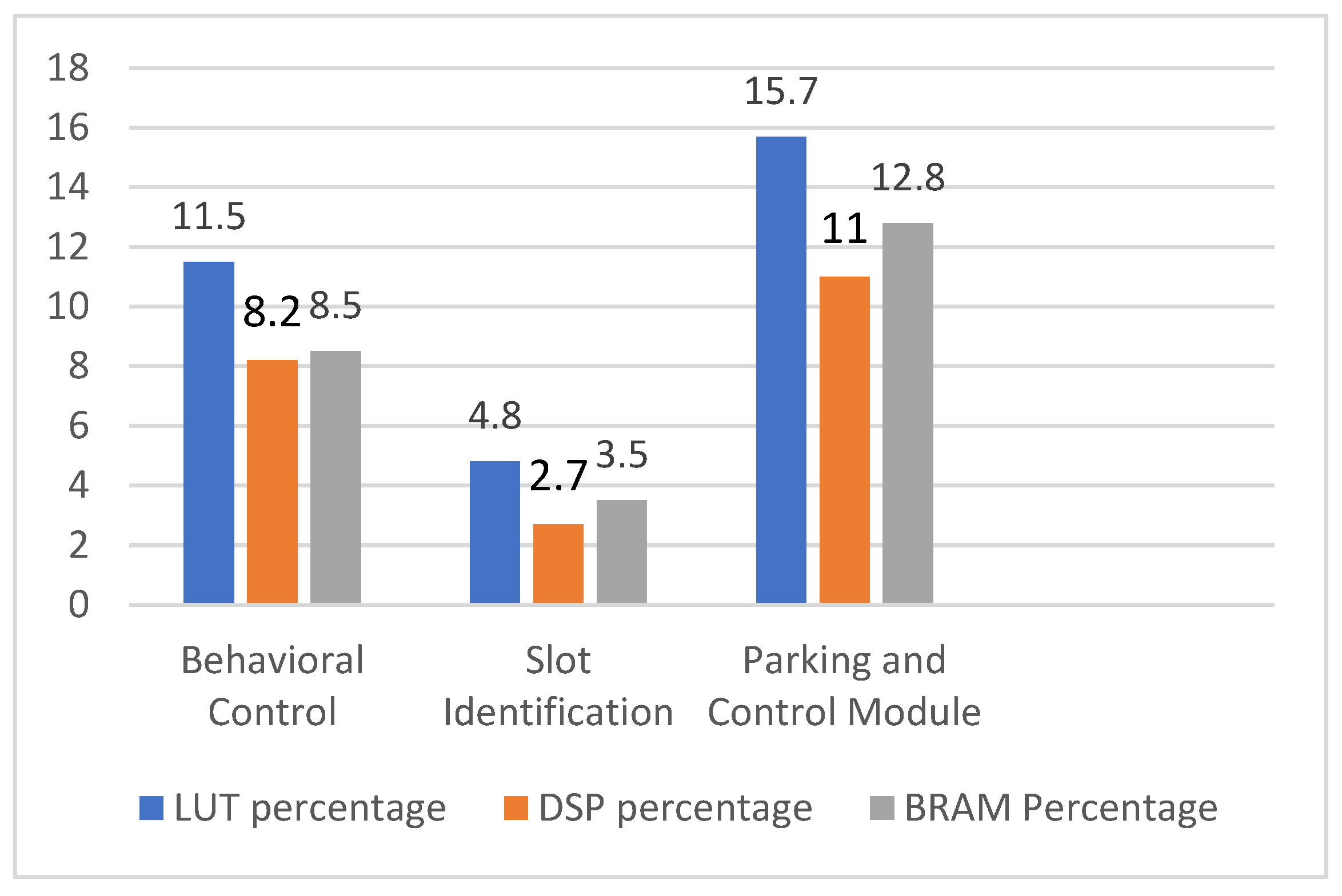
| Modules | LUT | FF | DSP | BRAM |
|---|---|---|---|---|
| Behavioral control and device interfacings | 6128 | 12,256 | 18 | 12 |
| Slot identification | 2554 | 5108 | 6 | 5 |
| Parking and control module | 8342 | 16,684 | 24 | 18 |
| Authors | Sensing Technologies | Methodology | Computation Device | Advantages | Remarks |
|---|---|---|---|---|---|
| Bing Li et al. [30] | LIDAR-based odometer and camera | Parking in garage using multi-story approach | CPU | Local SLAM has been executed in a shopping mall. | Limited to individual parking |
| Jiren Zhang et al. [31] | Integrated ultrasonic and LIDAR technologies | S-shape-based parallel parking executed | CPU | Real-time implementation in indoor environment. | Limited to individual parking |
| Jungwook Han et al. [32] | LIDAR | Perpendicular parking | NI Compact RIO (FPGA) | Indoor map building for parking. | Limited to individual parking |
| Deniz Ozsoyeller et al. [17] | Not available | Online-based mobile robot rendezvous | CPU | Multi-robot rendezvous with simulation results. | Limited to simulation |
| Bai Li et al. [33] | Not available | Optimal control-based parking approach | CPU | Framework and map developed based on lightweight methods. | Limited to individual parking |
| B. Naji et al. [22] | IR sensors | Both angular and parallel parking methods mentioned | FPGA | Versatile parking using an FPGA-based robot. | Limited to individual parking with simulation results |
| Proposed truck–trailer robot parking | Ultrasonic sensor and IR sensor | Mimic-based trailer robot parking in lines with perpendicular approach using rendezvous | FPGA | Hardware-efficient schemes for truck–trailer robot parking with rendezvous. | In future, partial reconfiguration approach integration will decrease device utilization |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
G, D.V.; Karumuri, S.R.; C, C.M.; Lam, S.-K.; Narambhatlu, J.; Dubey, S. Hardware-Efficient Scheme for Trailer Robot Parking by Truck Robot in an Indoor Environment with Rendezvous. Sensors 2023, 23, 5097. https://doi.org/10.3390/s23115097
G DV, Karumuri SR, C CM, Lam S-K, Narambhatlu J, Dubey S. Hardware-Efficient Scheme for Trailer Robot Parking by Truck Robot in an Indoor Environment with Rendezvous. Sensors. 2023; 23(11):5097. https://doi.org/10.3390/s23115097
Chicago/Turabian StyleG, Divya Vani, Srinivasa Rao Karumuri, Chinnaiah M C, Siew-Kei Lam, Janardhan Narambhatlu, and Sanjay Dubey. 2023. "Hardware-Efficient Scheme for Trailer Robot Parking by Truck Robot in an Indoor Environment with Rendezvous" Sensors 23, no. 11: 5097. https://doi.org/10.3390/s23115097
APA StyleG, D. V., Karumuri, S. R., C, C. M., Lam, S.-K., Narambhatlu, J., & Dubey, S. (2023). Hardware-Efficient Scheme for Trailer Robot Parking by Truck Robot in an Indoor Environment with Rendezvous. Sensors, 23(11), 5097. https://doi.org/10.3390/s23115097