
Controlled Symmetry with Woods-Saxon Stochastic Resonance Enabled Weak Fault Detection



Abstract
1. Introduction
2. The Proposed CSwWSSR
2.1. Introduction of CSwWSSR
2.2. Optimization of CSwWSSR Parameters
3. Simulation
3.1. Output Analysis of Simulation Signal
3.2. Capability of Detecting Different Simulation Signals
4. Experimental Demonstration of Bearing
5. Conclusions
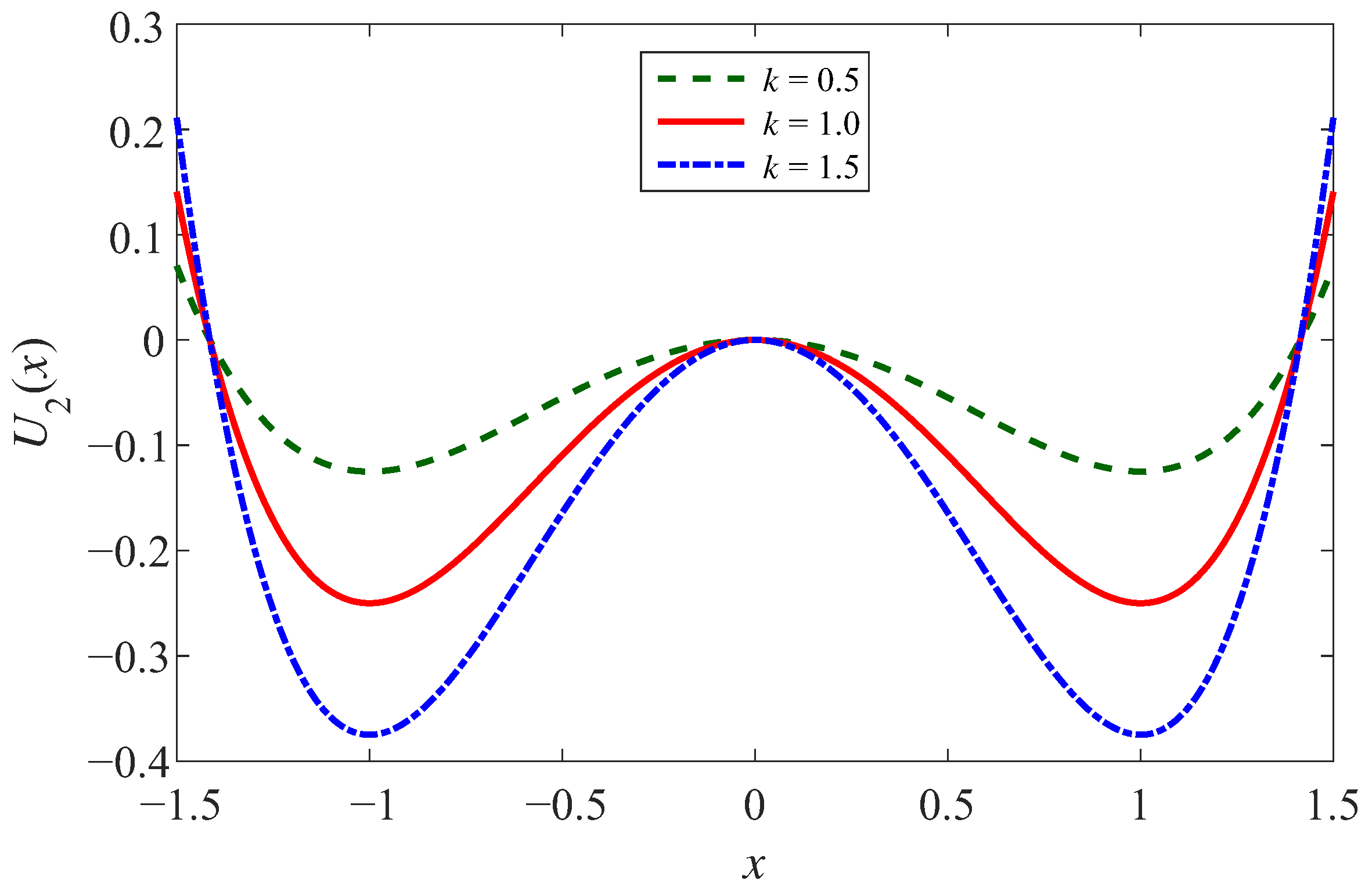
- We analyze the potential functions of WSSR, CSSR, and CSwWSSR to investigate the effects of parameters on the potential structure and dynamical properties. The intermediate potential well of the CSwWSSR is discovered to be controlled by the parameters (H, W, a), which have the same impact on the potential structure as the WSSR, and the potential wells on both sides depend on the parameter k. The CSwWSSR parameters are transparent to the control of the potential structure, which means that each parameter controls a different aspect of the potential structure.
- The output SNR curves of WSSR, CSSR, and CSwWSSR were examined for various noise intensities and various fault characteristic frequencies, demonstrating how well CSwWSSR combines the benefits of WSSR and CSSR both in terms of anti-noise and enhancement of high frequency signals. It has both the features of stable particle motion in WSSR and the controlled adjustment of potential wells on both sides in CSSR.
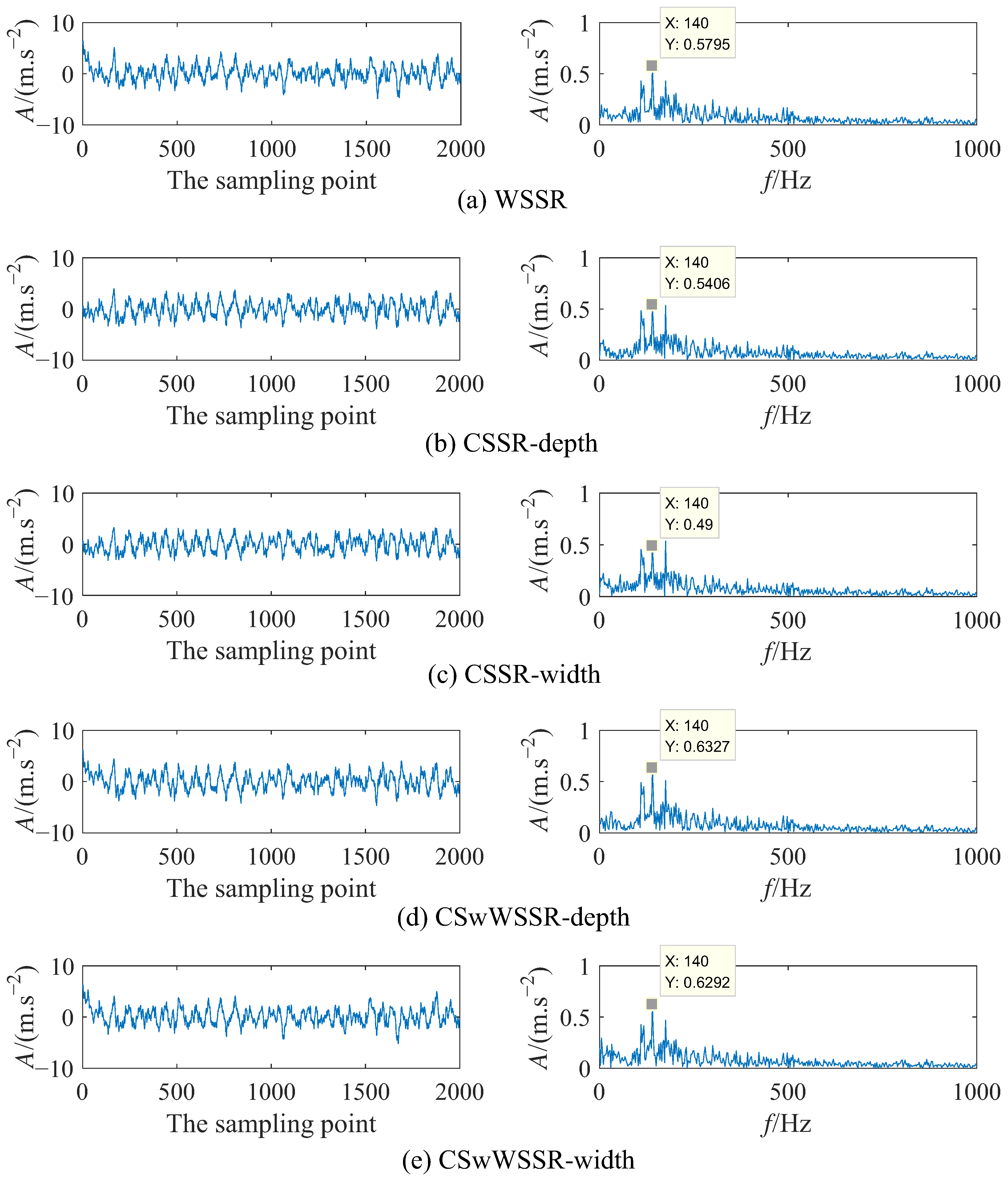
- We compare the output signal time domain and frequency domain diagrams of the WSSR, CSSR, and CSwWSSR after PSO optimized parameters in the simulation signal and bearing experiment. In terms of output SNR and amplitude of fault characteristic frequency, it is apparent that CSwWSSR outperforms CSSR and WSSR, which indicates that CSwWSSR has robust engineering applicability in the future.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Gupta, P.; Pradhan, M.K. Fault detection analysis in rolling element bearing: A review. Mater. Today Proc. 2017, 4, 2085–2094. [Google Scholar] [CrossRef]
- Wei, Y.; Li, Y.; Xu, M.; Huang, W. A review of early fault diagnosis approaches and their applications in rotating machinery. Entropy 2019, 21, 409. [Google Scholar] [CrossRef] [PubMed]
- Duan, F.; Pan, Y.; Chapeau-Blondeau, F.; Abbott, D. Noise benefits in combined nonlinear bayesian estimators. IEEE Trans. Signal Process. 2019, 67, 4611–4623. [Google Scholar] [CrossRef]
- Liu, J.; Hu, B.; Yang, F.; Zang, C.; Ding, X. Stochastic Resonance in a delay-controlled dissipative bistable potential for weak signal enhancement. Commun. Nonlinear Sci. Numer. Simul. 2020, 85, 105245. [Google Scholar] [CrossRef]
- Qiao, Z.; Pan, Z. SVD principle analysis and fault diagnosis for bearings based on the correlation coefficient. Meas. Sci. Technol. 2015, 26, 085014. [Google Scholar] [CrossRef]
- Xu, M.; Zheng, C.; Sun, K.; Xu, L.; Qiao, Z.; Lai, Z. Stochastic resonance with parameter estimation for enhancing unknown compound fault detection of bearings. Sensors 2023, 23, 3860. [Google Scholar] [CrossRef] [PubMed]
- Benzi, R.; Sutera, A.; Vulpiani, A. The mechanism of stochastic resonance. J. Phys. Math. Gen. 1981, 14, L453–L457. [Google Scholar] [CrossRef]
- Lu, S.; He, Q.; Wang, J. A review of stochastic resonance in rotating machine fault detection. Sensors 2019, 116, 230–260. [Google Scholar] [CrossRef]
- Hu, N.; Chen, M.; Wen, X. The application of stochastic resonance theory for early detecting rub-impact fault of rotor system. Mech. Syst. Signal Process. 2003, 17, 883–895. [Google Scholar] [CrossRef]
- Gammaitoni, L.; Hänggi, P.; Jung, P.; Marchesoni, F. Stochastic resonance: A remarkable idea that changed our perception of noise. Eur. Phys. J. B 2009, 69, 1–3. [Google Scholar] [CrossRef]
- Caccamo, M.T.; Magazù, S. A physical–mathematical approach to climate change effects through stochastic resonance. Climate 2019, 7, 21. [Google Scholar] [CrossRef]
- Wang, W.; Xiang, S.; Xie, S.; Xiang, B. An adaptive single-well stochastic resonance algorithm applied to trace analysis of Clenbuterol in human urine. Molecules 2012, 17, 1929–1938. [Google Scholar] [CrossRef] [PubMed]
- Markina, A.; Muratov, A.; Petrovskyy, V.; Avetisov, V. Detection of single molecules using stochastic resonance of bistable oligomers. Nanomaterials 2020, 10, 2519. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Y.; Wang, Z.; Tazeddinova, D.; Ebrahimi, F.; Habibi, M.; Safarpour, H. Enhancing active vibration control performances in a smart rotary sandwich thick nanostructure conveying viscous fluid flow by a PD controller. Waves Random Complex Media 2021, 33, 1–24. [Google Scholar] [CrossRef]
- Zare, R.; Najaafi, N.; Habibi, M.; Ebrahimi, F.; Safarpour, H. Influence of imperfection on the smart control frequency characteristics of a cylindrical sensor-actuator GPLRC cylindrical shell using a proportional-derivative smart controller. Smart Struct. Syst. 2020, 26, 469–480. [Google Scholar] [CrossRef]
- Ko, L.-W.; Chikara, R.K.; Chen, P.-Y.; Jheng, Y.-C.; Wang, C.-C.; Yang, Y.-C.; Li, L.P.-H.; Liao, K.-K.; Chou, L.-W.; Kao, C.-L. Noisy galvanic vestibular stimulation (stochastic resonance) changes electroencephalography activities and postural control in patients with bilateral vestibular hypofunction. Brain Sci. 2020, 10, 740. [Google Scholar] [CrossRef] [PubMed]
- Li, Q.; Li, Z. A novel sequential spectrum sensing method in cognitive radio using suprathreshold stochastic resonance. IEEE Trans. Veh. Technol. 2013, 63, 1717–1725. [Google Scholar] [CrossRef]
- Qiao, Z.; Lei, Y.; Li, N. Applications of stochastic resonance to machinery fault detection: A review and tutorial. Mech. Syst. Signal Process. 2019, 122, 502–536. [Google Scholar] [CrossRef]
- Dong, H.; He, K.; Shen, X.; Ma, S.; Wang, H.; Qiao, C. Adaptive intrawell matched stochastic resonance with a potential constraint aided line enhancer for passive sonars. Sensors 2020, 20, 3269. [Google Scholar] [CrossRef]
- Liu, J.; Hu, B.; Wang, Y. Optimum adaptive array stochastic resonance in noisy grayscale image restoration. Phys. Lett. A 2019, 383, 1457–1465. [Google Scholar] [CrossRef]
- Ikemoto, S.; DallaLibera, F.; Hosoda, K. Noise-modulated neural networks as an application of stochastic resonance. Neurocomputing 2018, 277, 29–37. [Google Scholar] [CrossRef]
- Nishiguchi, K.; Fujiwara, A. Detecting signals buried in noise via nanowire transistors using stochastic resonance. Appl. Phys. Lett. 2012, 101, 193108. [Google Scholar] [CrossRef]
- Li, J.; Chen, X.; Du, Z.; Fang, Z.; He, Z. A new noise-controlled second-order enhanced stochastic resonance method with its application in wind turbine drivetrain fault diagnosis. Renew. Energy 2013, 60, 7–19. [Google Scholar] [CrossRef]
- Liu, J.; Guo, J.; Ding, X.; Qiao, Z.; Zang, C. Colored correlated noises induced regime shifts in a time-delayed lake eutrophication ecosystem. Front. Sustain. Dev. 2022, 2, 24–37. [Google Scholar] [CrossRef]
- Liu, J.; Li, Z.; Guan, L.; Pan, L. A novel parameter-tuned stochastic resonator for binary PAM signal processing at low SNR. IEEE Commun. Lett. 2014, 18, 427–430. [Google Scholar] [CrossRef]
- He, D.; Chen, X.; Pei, L.; Jiang, L.; Yu, W. Improvement of noise uncertainty and signal-to-noise ratio wall in spectrum sensing based on optimal stochastic resonance. Sensors 2019, 19, 841. [Google Scholar] [CrossRef]
- Shi, P.; Yuan, D.; Han, D.; Zhang, Y.; Fu, R. Stochastic resonance in a time-delayed feedback tristable system and its application in fault diagnosis. J. Sound Vib. 2018, 424, 1–14. [Google Scholar] [CrossRef]
- Lu, S.; He, Q.; Zhang, H.; Kong, F. Enhanced rotating machine fault diagnosis based on time-delayed feedback stochastic resonance. J. Vib. Acoust. 2015, 137, 051008. [Google Scholar] [CrossRef]
- Mei, D.C.; Du, L.C.; Wang, C.J. The effects of time delay on stochastic resonance in a bistable system with correlated noises. J. Stat. Phys. 2009, 137, 625–638. [Google Scholar] [CrossRef]
- He, M.; Xu, W.; Sun, Z. Dynamical complexity and stochastic resonance in a bistable system with time delay. Nonlinear Dyn. 2015, 79, 1787–1795. [Google Scholar] [CrossRef]
- Liao, Z.; Wang, Z.; Yamahara, H.; Tabata, H. Echo state network activation function based on bistable stochastic resonance. Chaos Solitons Fractals 2021, 153, 111503. [Google Scholar] [CrossRef]
- Lai, Z.H.; Wang, S.B.; Zhang, G.Q.; Zhang, C.L.; Zhang, J.W. Rolling bearing fault diagnosis based on adaptive multiparameter-adjusting bistable stochastic resonance. Shock Vib. 2020, 2020, 1–15. [Google Scholar] [CrossRef]
- Liao, Z.; Wang, Z.; Yamahara, H.; Tabata, H. Low-power-consumption physical reservoir computing model based on overdamped bistable stochastic resonance system. Neurocomputing 2022, 468, 137–147. [Google Scholar] [CrossRef]
- Zhang, X.; Wang, J.; Liu, Z.; Wang, J. Weak feature enhancement in machinery fault diagnosis using empirical wavelet transform and an improved adaptive bistable stochastic resonance. ISA Trans. 2019, 84, 283–295. [Google Scholar] [CrossRef] [PubMed]
- Qiao, Z.; Lei, Y.; Lin, J.; Jia, F. An adaptive unsaturated bistable stochastic resonance method and its application in mechanical fault diagnosis. Mech. Syst. Signal Process. 2017, 84, 731–746. [Google Scholar] [CrossRef]
- Lu, J.; Huang, M.; Yang, J.-J. A novel spectrum sensing method based on tri-stable stochastic resonance and quantum particle swarm optimization. Wirel. Pers. Commun. 2017, 95, 2635–2647. [Google Scholar] [CrossRef]
- Lu, S.; He, Q.; Kong, F. Stochastic resonance with Woods-Saxon potential for rolling element bearing fault diagnosis. Mech. Syst. Signal Process. 2014, 45, 488–503. [Google Scholar] [CrossRef]
- Zhang, G.; Li, H. Hybrid tri-stable stochastic resonance system used for fault signal detection. J. Vib. Shock 2019, 38, 9–17. [Google Scholar]
- Khan, M.B.; Santos-García, G.; Noor, M.A.; Soliman, M.S. Some new concepts related to fuzzy fractional calculus for up and down convex fuzzy-number valued functions and inequalities. Chaos Solitons Fractals 2022, 164, 112692. [Google Scholar] [CrossRef]
- Khan, M.B.; Santos-García, G.; Noor, M.A.; Soliman, M.S. New Hermite–Hadamard inequalities for convex fuzzy-number-valued mappings via fuzzy riemann integrals. Mathematics 2022, 10, 3251. [Google Scholar] [CrossRef]
- Khan, M.B.; Othman, H.A.; Santos-García, G.; Saeed, T.; Soliman, M.S. On fuzzy fractional integral operators having exponential kernels and related certain inequalities for exponential trigonometric convex fuzzy-number valued mappings. Chaos Solitons Fractals 2023, 169, 113274. [Google Scholar] [CrossRef]
- Macías-Díaz, J.E.; Khan, M.B.; Noor, M.A.; Abd Allah, A.M.; Alghamdi, S.M. Hermite-Hadamard inequalities for generalized convex functions in interval-valued calculus. AIMS Math. 2022, 7, 4266–4292. [Google Scholar] [CrossRef]
- Khan, M.B.; Treanta, S.; Soliman, M.S. Generalized preinvex interval-valued functions and related Hermite–Hadamard type inequalities. Symmetry 2022, 14, 1901. [Google Scholar] [CrossRef]
- Khan, M.B.; Noor, M.A.; Noor, K.I.; Chu, Y.-M. Higher-order strongly preinvex fuzzy mappings and fuzzy mixed variational-like inequalities. Int. J. Comput. Intell. Syst. 2021, 14, 1856. [Google Scholar] [CrossRef]
- Khan, M.B.; Noor, M.A.; Noor, K.I.; Chu, Y.-M. New Hermite–Hadamard-type inequalities for -convex fuzzy-interval-valued functions. Adv. Differ. Equ. 2021, 149, 1–20. [Google Scholar] [CrossRef]
- Wang, D.; Tan, D.; Liu, L. Particle swarm optimization algorithm: An overview. Soft Comput. 2018, 22, 387–408. [Google Scholar] [CrossRef]
- Xia, X.; Gui, L.; Yu, F.; Wu, H.; Wei, B.; Zhang, Y.; Zhan, Z. Triple archives particle swarm optimization. IEEE Trans. Cybern. 2019, 50, 4862–4875. [Google Scholar] [CrossRef]
- Shami, T.M.; El-Saleh, A.A.; Alswaitti, M.; Al-Tashi, Q.; Summakieh, M.A.; Mirjalili, S. Particle swarm optimization: A comprehensive survey. IEEE Access. 2022, 10, 10031–10061. [Google Scholar] [CrossRef]
- Tian, D.; Shi, Z. MPSO: Modified particle swarm optimization and its applications. Swarm Evol. Comput. 2018, 41, 49–68. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | H | W | a | k | SNR/dB |
|---|---|---|---|---|---|
| WSSR | 8.5624 | 6.2607 | 3.5634 | - | −10.16 |
| CSSR-depth | - | - | - | 0.0417 | −10.85 |
| CSSR-width | - | - | - | 1.6886 | −11.63 |
| CSwWSSR-depth | 5.5987 | 5.1328 | 0.6898 | 0.0015 | −9.863 |
| CSwWSSR-width | 1.6607 | 2.3355 | 0.1399 | 3.3592 | −9.777 |
| Inner Diameter/mm | Outer Diameter/mm | D/mm | n | d/mm | Contact Angle/(°) |
|---|---|---|---|---|---|
| 25.001 | 51.999 | 39.040 | 9.000 | 7.940 | 0 |
| Model | H | W | a | k | SNR/dB |
|---|---|---|---|---|---|
| WSSR | 8.2734 | 3.8796 | 0.7568 | - | −11.21 |
| CSSR-depth | - | - | - | 0.2897 | −9.813 |
| CSSR-width | - | - | - | 1.1389 | −9.911 |
| CSwWSSR-depth | 3.4026 | 3.4026 | 0.0367 | 0.1631 | −9.702 |
| CSwWSSR-width | 3.2067 | 2.2868 | 0.0164 | 1.7698 | −8.996 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, J.; Guo, J.; Hu, B.; Zhai, Q.; Tang, C.; Zhang, W. Controlled Symmetry with Woods-Saxon Stochastic Resonance Enabled Weak Fault Detection. Sensors 2023, 23, 5062. https://doi.org/10.3390/s23115062
Liu J, Guo J, Hu B, Zhai Q, Tang C, Zhang W. Controlled Symmetry with Woods-Saxon Stochastic Resonance Enabled Weak Fault Detection. Sensors. 2023; 23(11):5062. https://doi.org/10.3390/s23115062
Chicago/Turabian StyleLiu, Jian, Jiaqi Guo, Bing Hu, Qiqing Zhai, Can Tang, and Wanjia Zhang. 2023. "Controlled Symmetry with Woods-Saxon Stochastic Resonance Enabled Weak Fault Detection" Sensors 23, no. 11: 5062. https://doi.org/10.3390/s23115062
APA StyleLiu, J., Guo, J., Hu, B., Zhai, Q., Tang, C., & Zhang, W. (2023). Controlled Symmetry with Woods-Saxon Stochastic Resonance Enabled Weak Fault Detection. Sensors, 23(11), 5062. https://doi.org/10.3390/s23115062