
Pankun: A New Generation of Broadband Ocean Bottom Seismograph


Abstract
1. Introduction
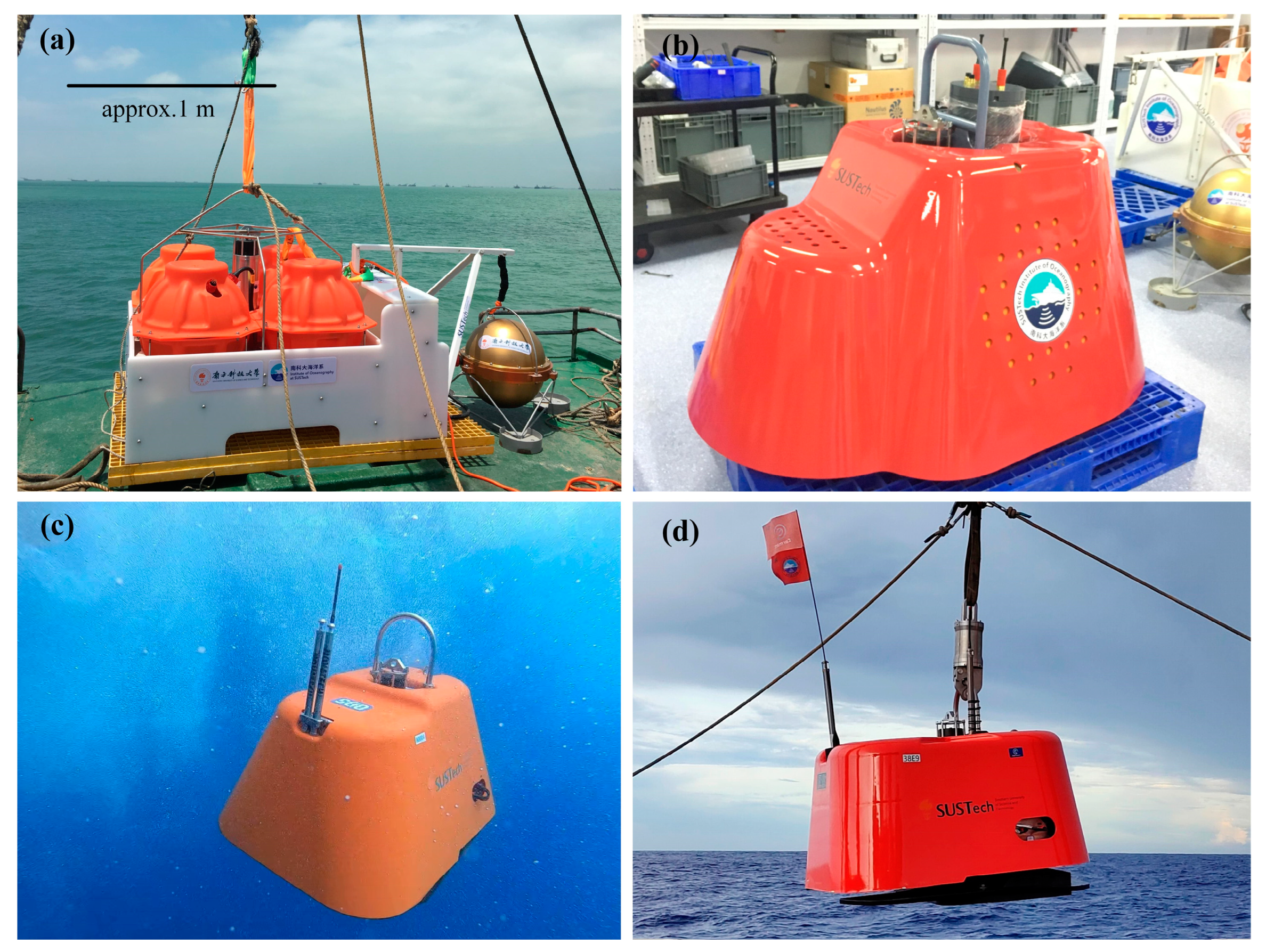
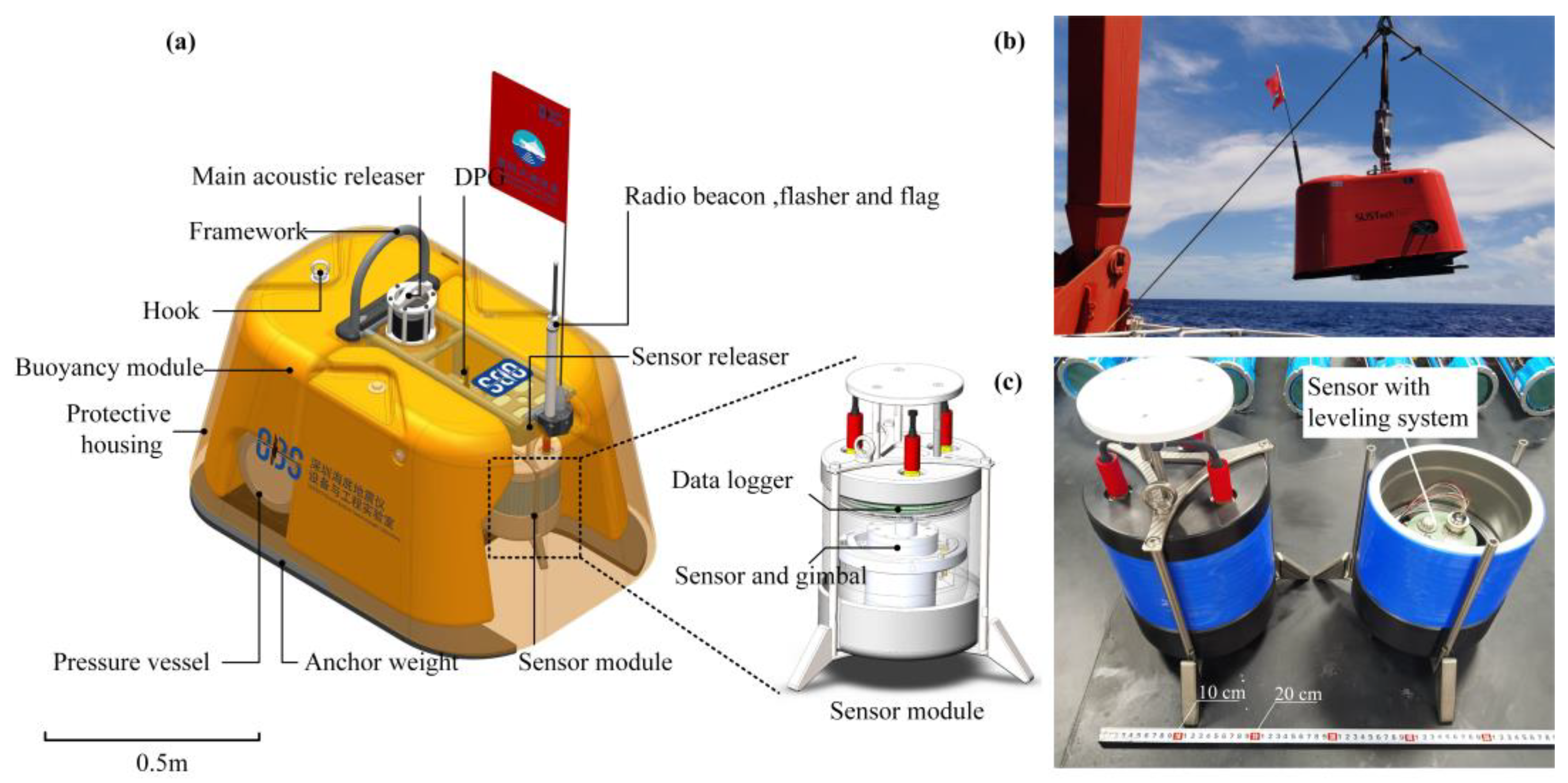
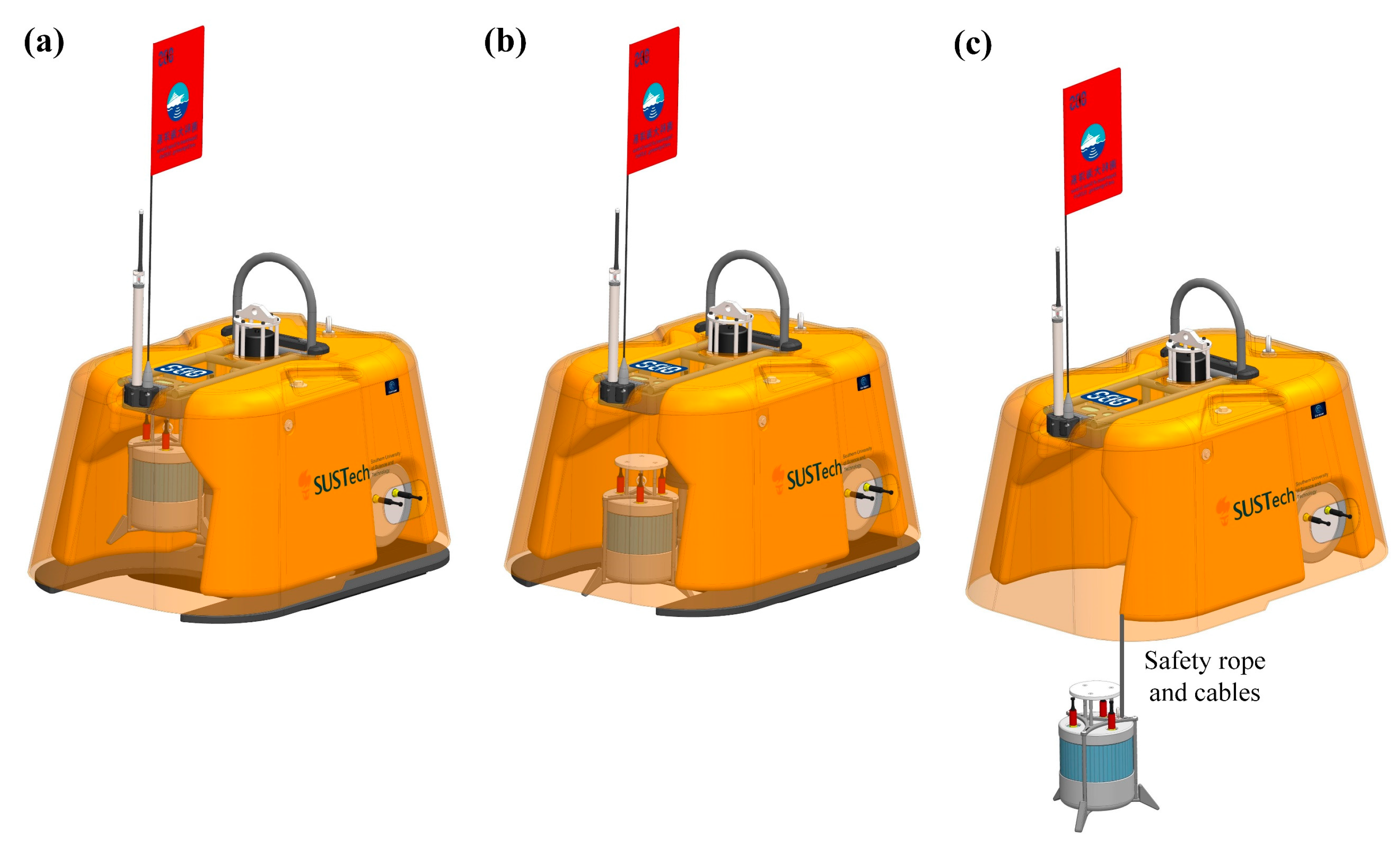
2. Pankun OBS’s Structure and Main Features
2.1. Overall Structure of Pankun OBS
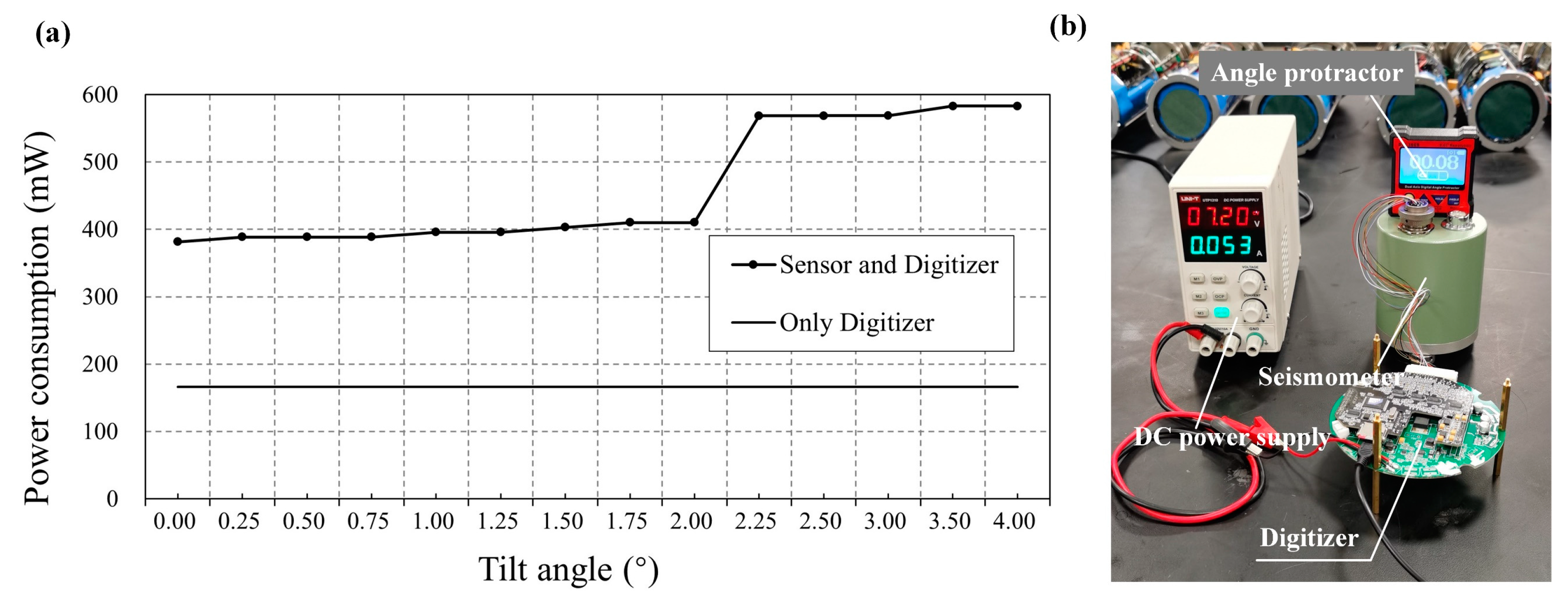
2.2. Main Features of Pankun OBS
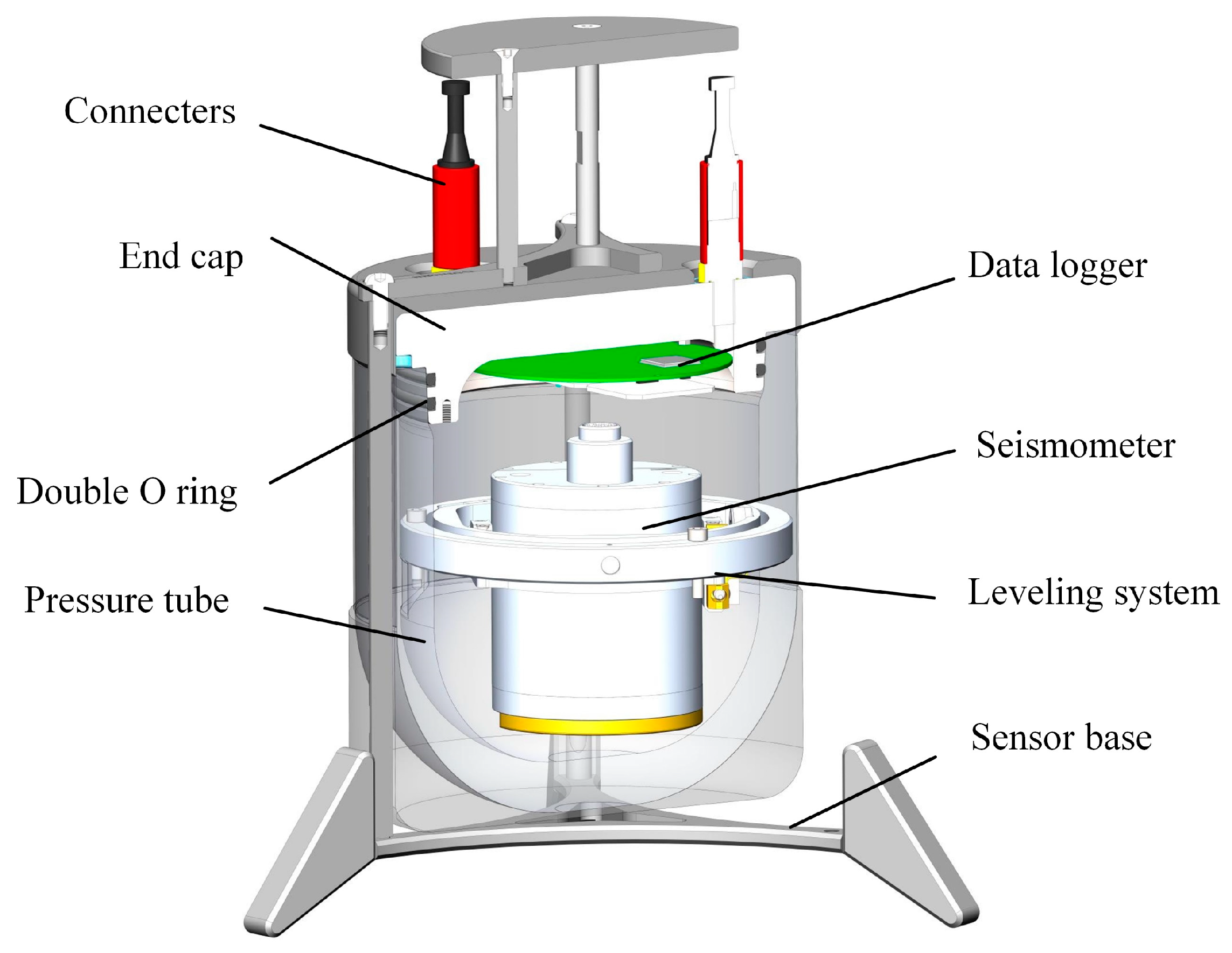
3. Pankun’s Key Components
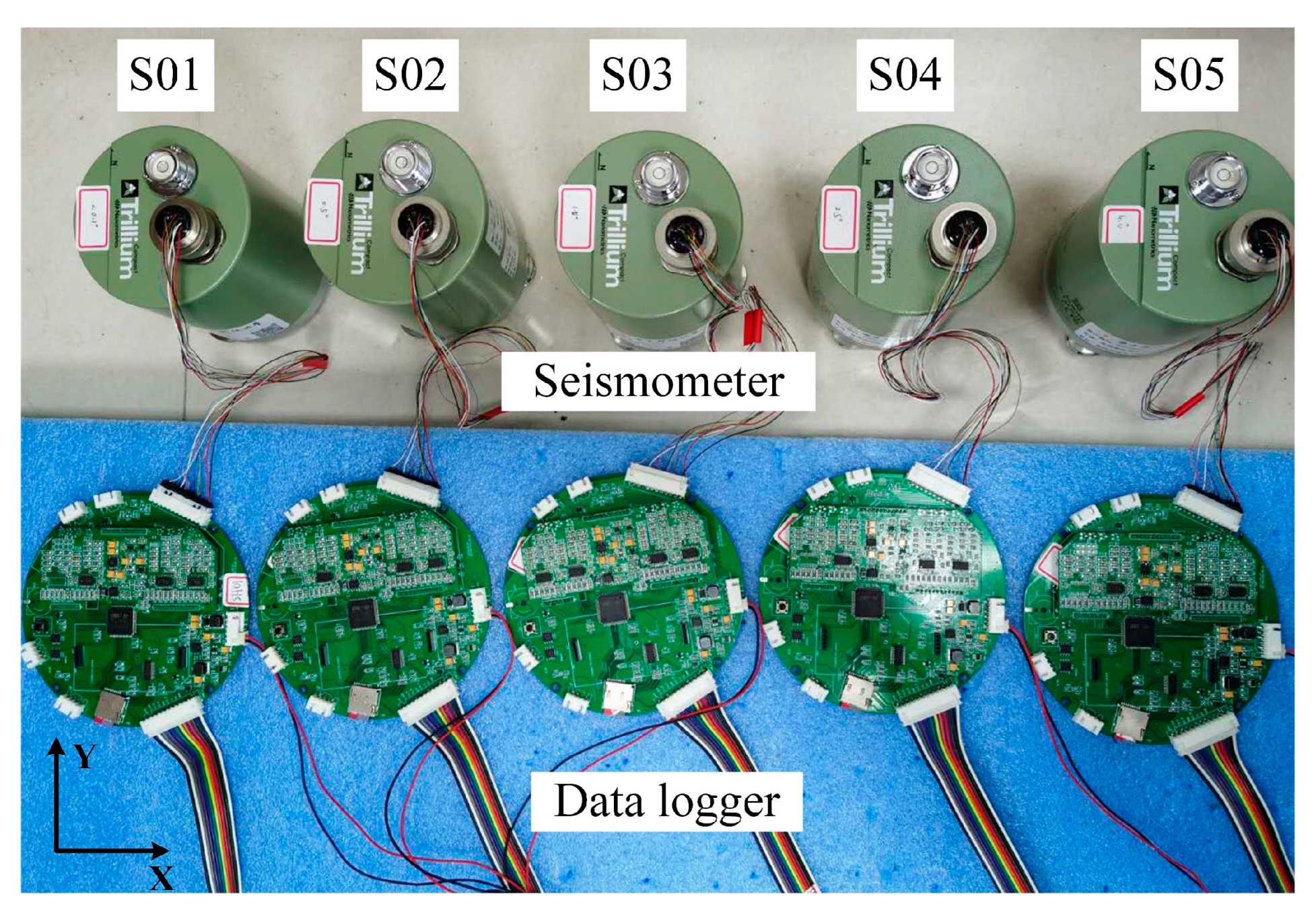
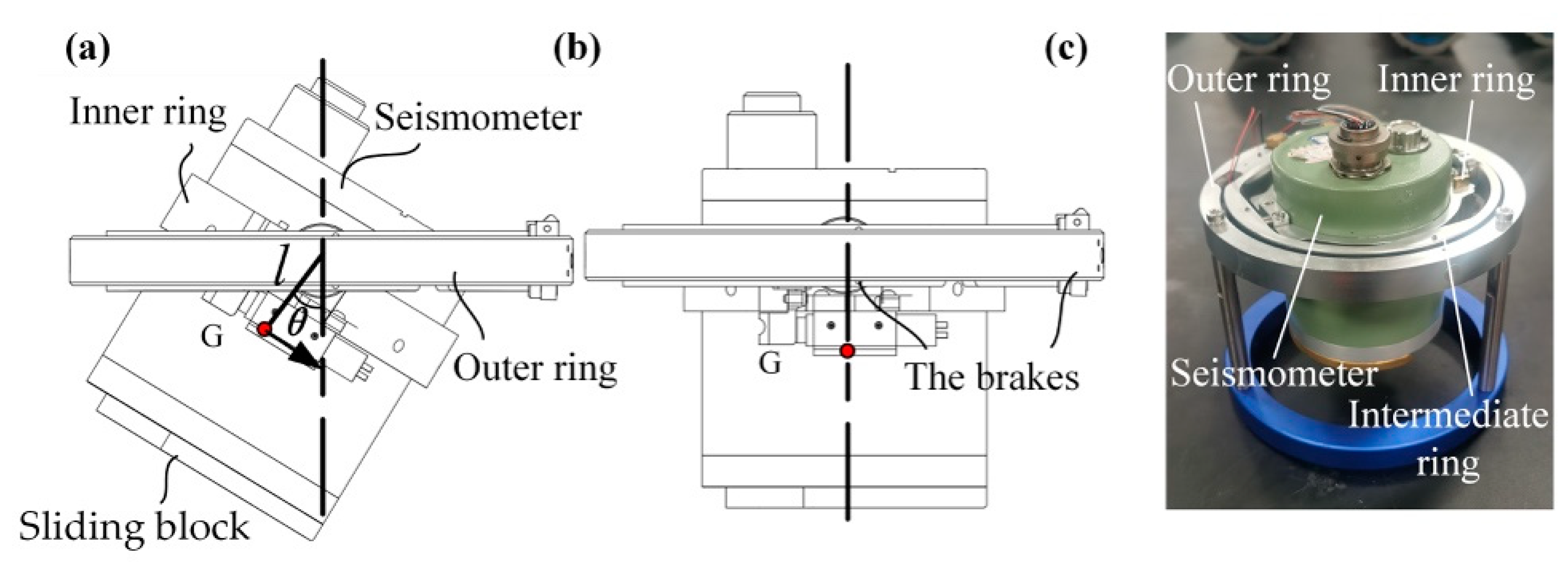
3.1. Sensor Module and the Leveling System
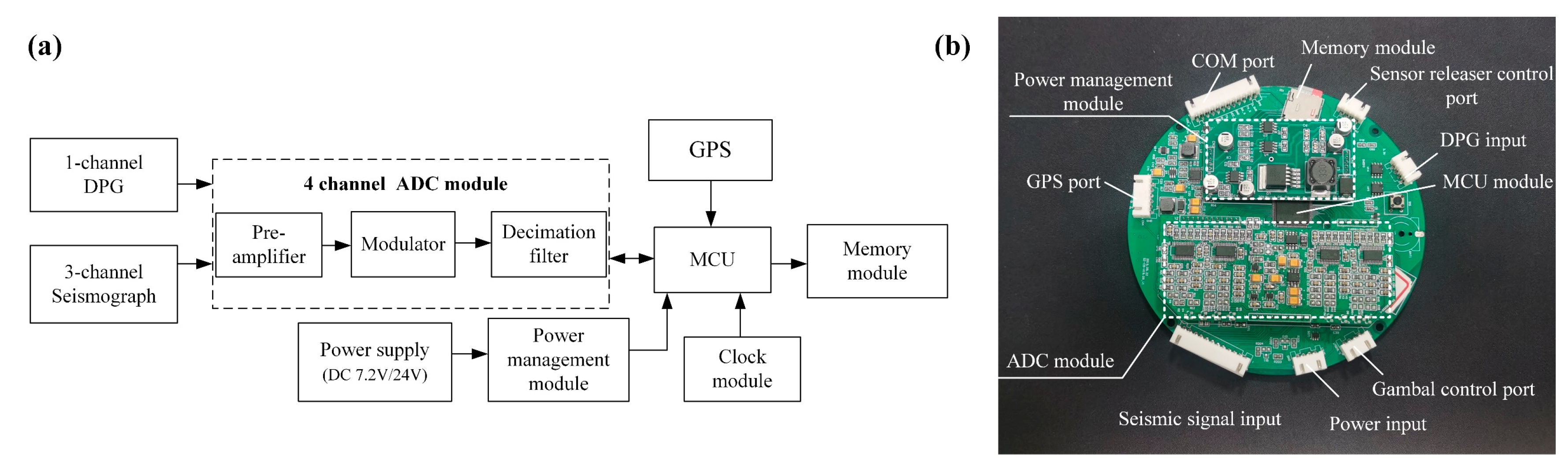
3.2. Data Logger
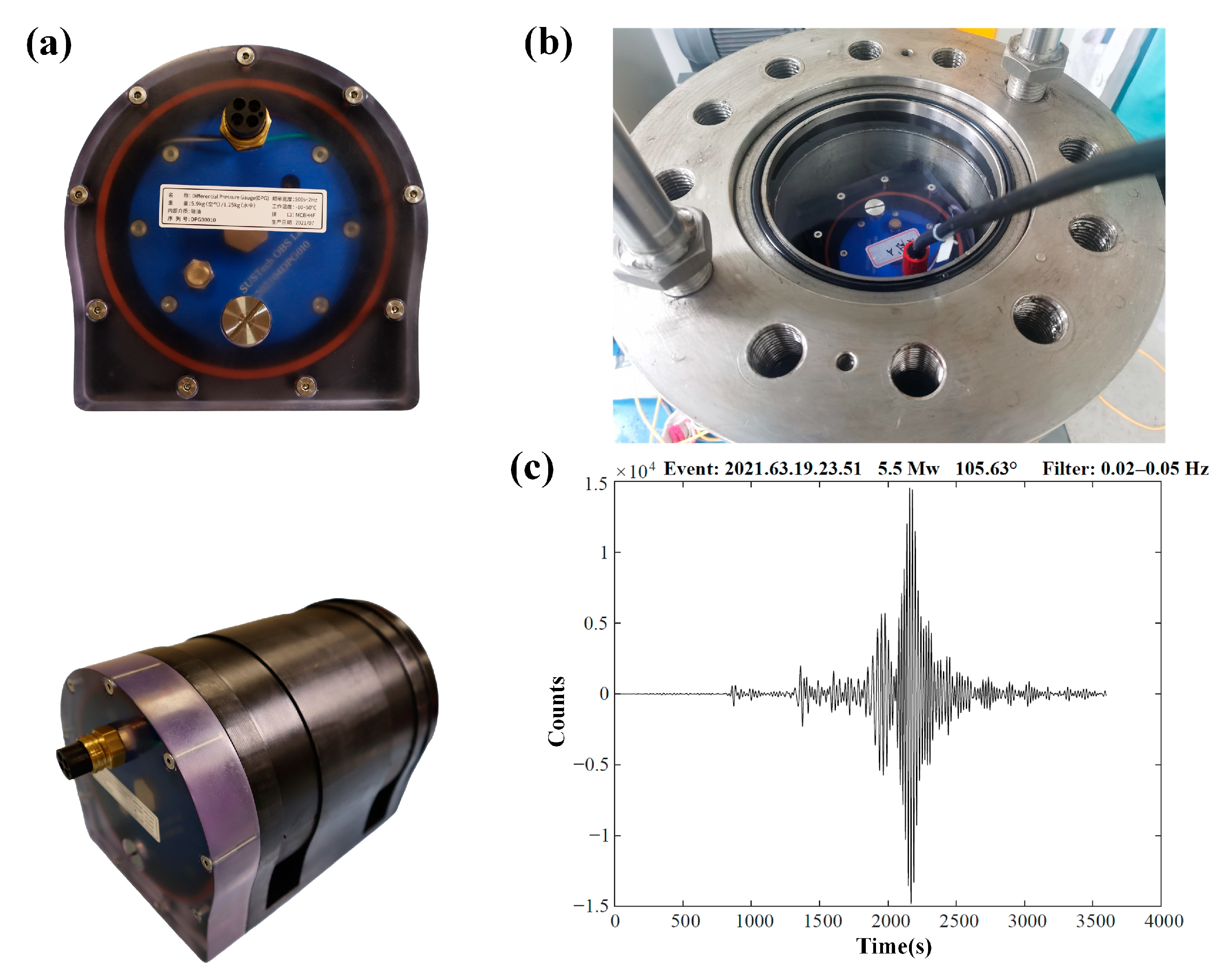
3.3. Differential Pressure Gauge (DPG)
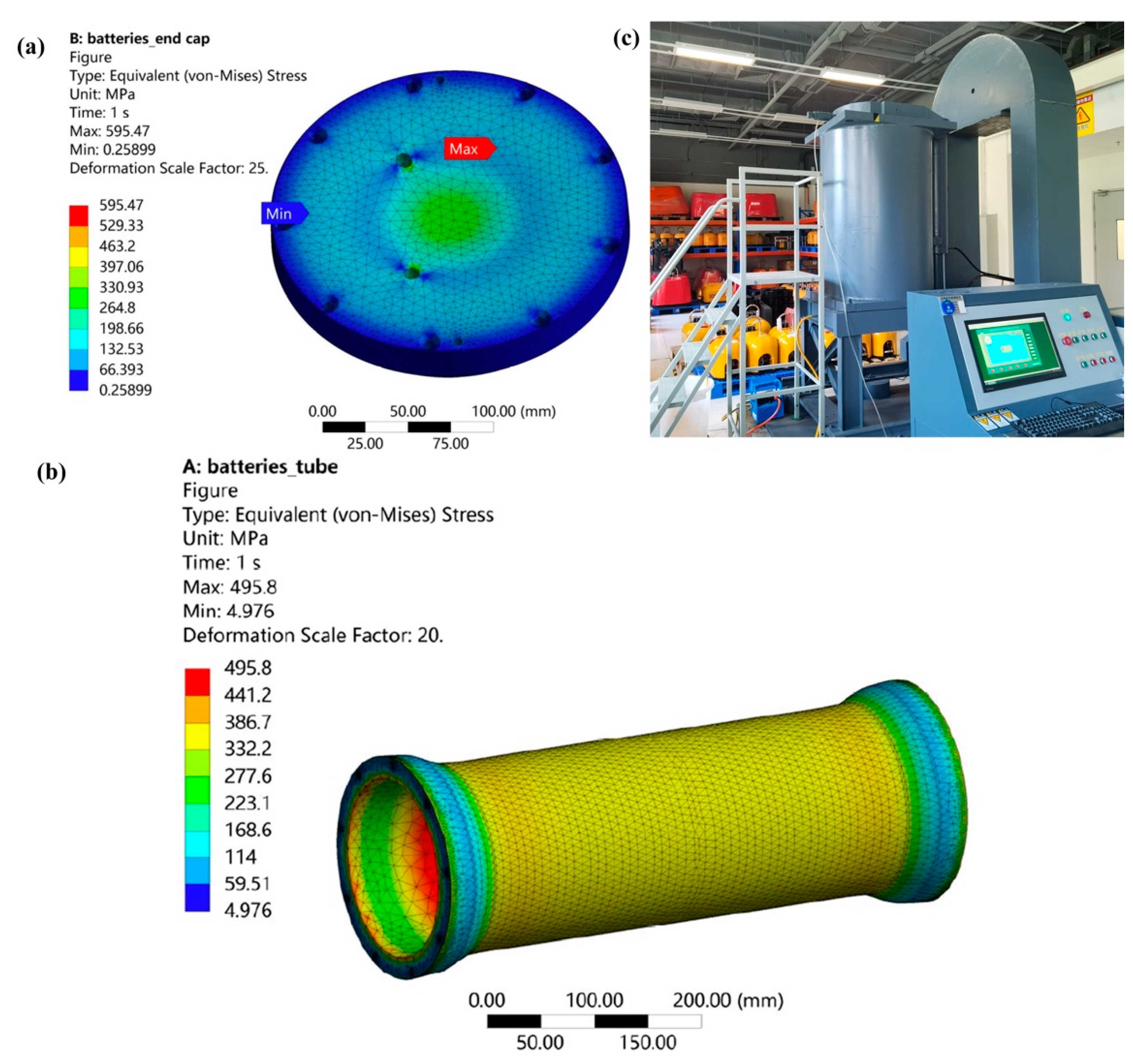
3.4. The Pressure Vessels
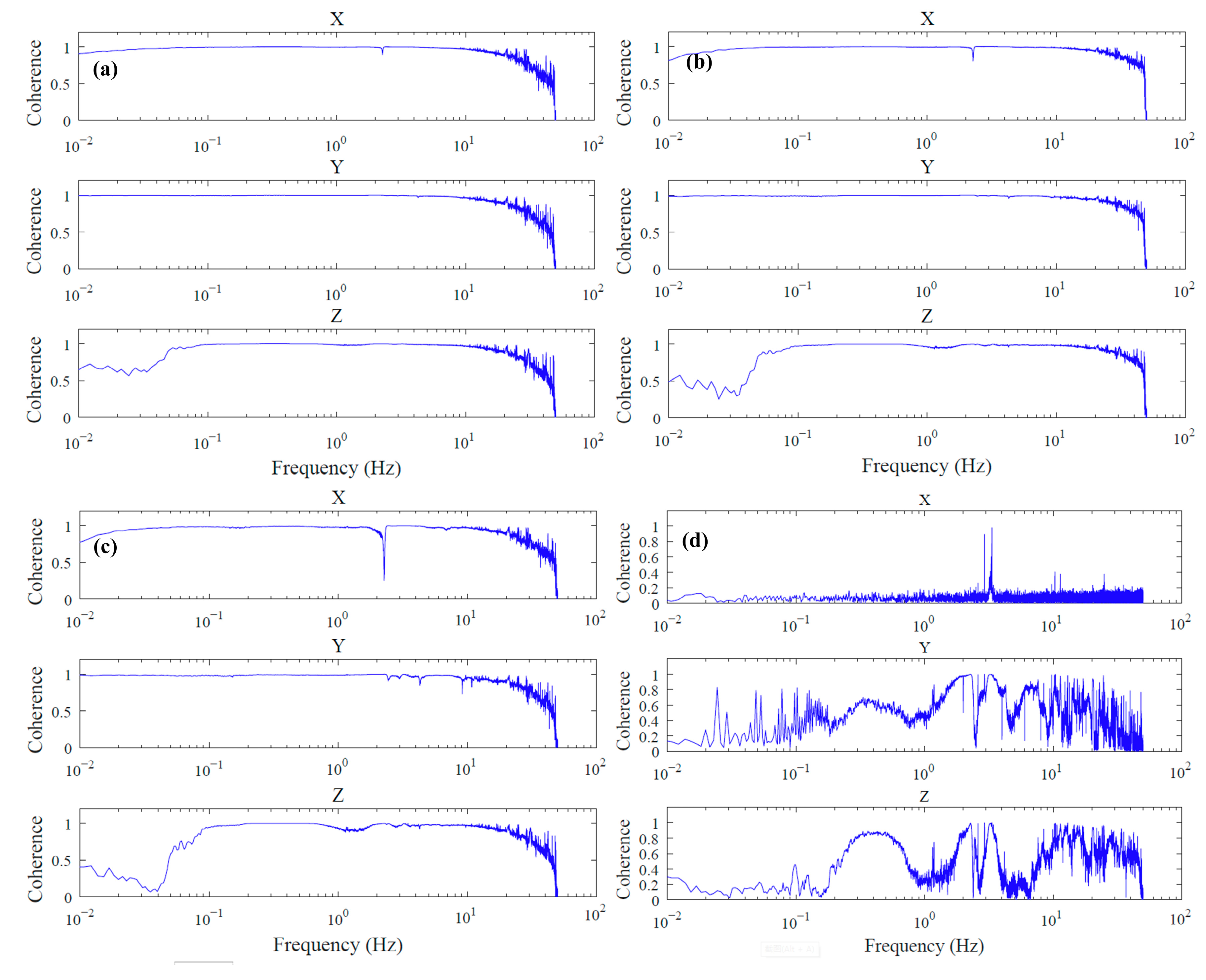
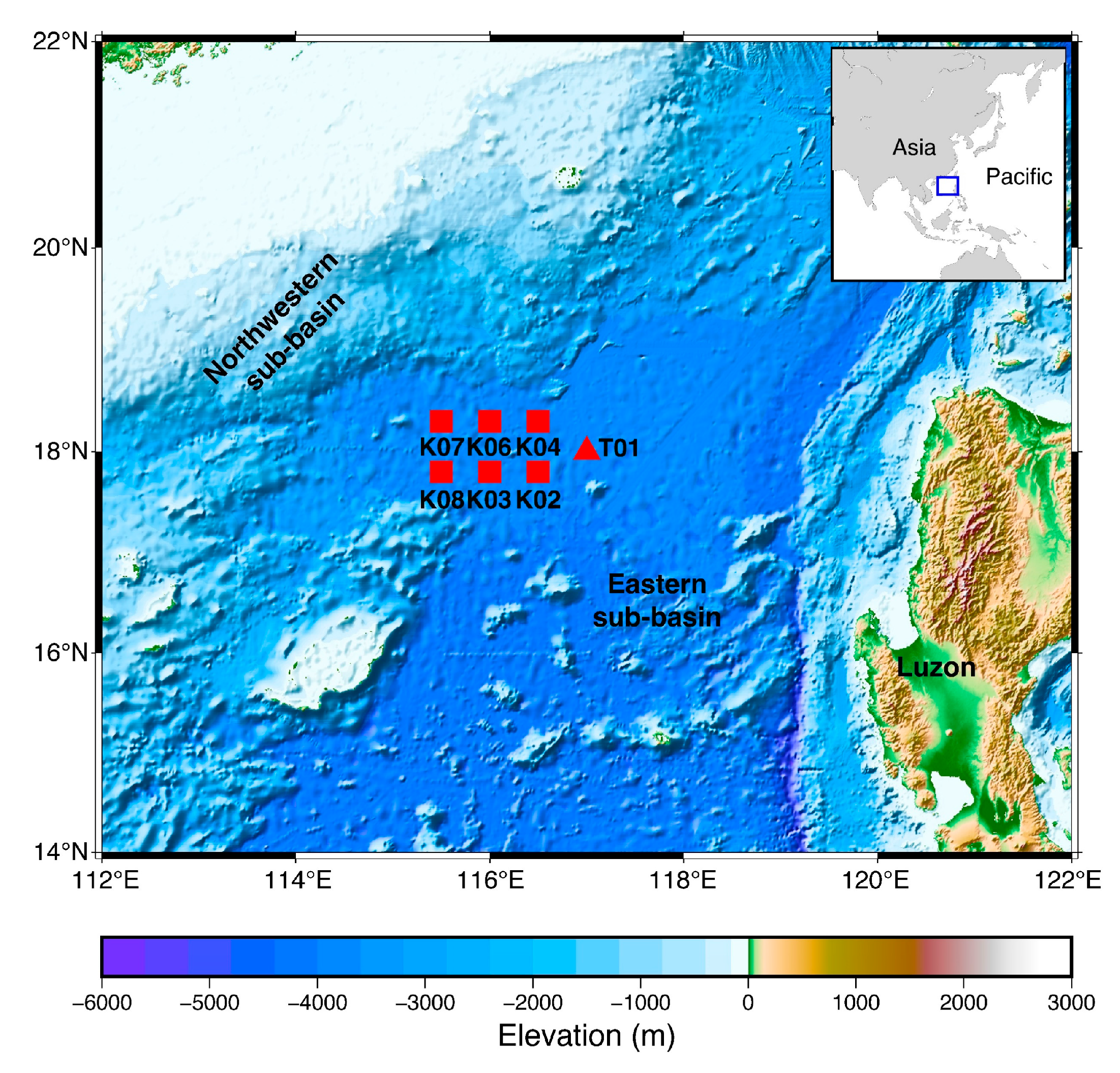
4. Testing Pankun and Its Data Quality Assessment
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Collins, J.A.; Vernon, F.L.; Orcutt, J.A.; Stephen, R.A.; Peal, K.R.; Wooding, F.B.; Hildebrand, J.A. Broadband seismology in the oceans: Lessons from the ocean seismic network pilot experiment. Geophys. Res. Lett. 2001, 28, 49–52. [Google Scholar] [CrossRef]
- Suyehiro, K.; Montagner, J.; Stephen, R.A.; Araki, E.; Kanazawa, T.; Orcutt, J.; Shinohara, M. Ocean seismic observatories. Oceanography 2006, 19, 144–149. [Google Scholar] [CrossRef]
- Liu, C.; Hua, Q.; Pei, Y.; Yang, T.; Xia, S.; Xue, M.; Le, B.M.; Huo, D.; Liu, F.; Hung, T.D. Passive-source Ocean Bottom Seismograph (OBS) array experiment in South China Sea and data quality analyses. Chin. Sci. Bull. 2014, 59, 4524–4535. [Google Scholar] [CrossRef]
- Le, B.M.; Yang, T.; John Chen, Y.; Yao, H. Correction of OBS clock errors using Scholte waves retrieved from cross-correlating hydrophone recordings. Geophys. J. Int. 2018, 212, 891–899. [Google Scholar] [CrossRef]
- Hung, T.D.; Yang, T.; Le, B.M.; Yu, Y. Effects of Failure of the Ocean-Bottom Seismograph Leveling System on Receiver Function Analysis. Seismol. Res. Lett. 2019, 90, 1191–1199. [Google Scholar] [CrossRef]
- Shiobara, H.; Kanazawa, T.; Isse, T. New Step for Broadband Seismic Observation on the Seafloor: BBOBS-NX. IEEE J. Ocean. Eng. 2013, 38, 396–405. [Google Scholar] [CrossRef]
- Fukao, Y.; Obayashi, M.; Nakakuki, T. The Deep Slab Project Group Stagnant slab: A review. Annu. Rev. Earth Planet. Sci. 2009, 37, 19–46. [Google Scholar] [CrossRef]
- Liu, D.; Yang, T.; Manh, L.B.; Wu, Y.C.; Wang, Y.Z.; Huang, X.F.; Du, H.R.; Wang, J.; Chen, Y.S. Seismometer-detached broadband ocean bottom seismograph (OBS): Development, test, and data quality analysis. Chin. J. Geophys. 2022, 65, 2560–2572. [Google Scholar]
- WHOI Broadband OBS (BBOBS). Available online: https://web.whoi.edu/obslab/instrumentation/broadbandobs/ (accessed on 5 May 2023).
- Wang, Y.; Yang, T.; Wu, Y.C.; Liu, D.; Huang, X.F.; Wang, J.; Zhong, W.X.; Shou, H.T.; Zhou, Y.; Chen, Y.S. A new broadband ocean bottom seismograph and characteristics of the seismic ambient noise on the South China Sea seafloor based on its recordings. Geophys. J. Int. 2022, 1, 684–695. [Google Scholar] [CrossRef]
- Hao, T.Y.; You, Q.Y. Progress of homemade OBS and its application on ocean bottom structure survey. Chin. J. Geophys. 2011, 54, 3352–3361. [Google Scholar]
- Sthler, S.C.; Sigloch, K.; Hosseini, K.; Crawford, W.C.; Barruol, G.; Schmidt-Aursch, M.C.; Tsekhmistrenko, M.; Scholz, J.R.; Mazzullo, A.; Deen, M. Performance Report of the RHUM-RUM Ocean Bottom Seismometer Network around La Réunion, western Indian Ocean. Adv. Geosci. 2016, 41, 43–63. [Google Scholar] [CrossRef]
- Webb, S.C. Broadband seismology and noise under the ocean. Rev. Geophys. 1998, 36, 105–142. [Google Scholar] [CrossRef]
- Bell, S.B.; Forsyth, D.W.; Ruan, Y. Removing noise from the vertical component records of ocean-bottom seismometers: Results from year one of the Cascadia Initiative. Bull. Seismol. Soc. Am. 2015, 105, 300–313. [Google Scholar] [CrossRef]
- An, C.; Cai, C.; Zhou, L.; Yang, T. Characteristics of low-frequency horizontal noise of ocean-bottom seismic data. Seismol. Res. Lett. 2022, 93, 257–267. [Google Scholar] [CrossRef]
- Hilmo, R.; Wilcock, W. Physical sources of high-frequency seismic noise on Cascadia Initiative ocean bottom seismometers. Geochem. Geophys. Geosyst. 2020, 21, e2020GC009085. [Google Scholar] [CrossRef]
- Wu, Y.C.; Yang, T.; Liu, D.; Dai, Y.; An, C. Current-induced noise in ocean bottom seismic data: Insights from a laboratory water flume experiment. In Earth and Space Science; AGU: Washington, DC, USA, 2023; submitted. [Google Scholar]
- Ringler, A.T.; Hutt, C.R. Self-Noise Models of Seismic Instruments. Seismol. Res. Lett. 2010, 81, 972–983. [Google Scholar] [CrossRef]
- Stoica, P.; Moses, R.L. Spectral Analysis of Signals; Pearson Prentice Hall: Upper Saddle River, NJ, USA, 2005; pp. 25–26. [Google Scholar]
- Graizer, V. The response to complex ground motions of seismom-eters with Galperin sensor configuration. Bull. Seismol. Soc. Am. 2009, 99, 1366–1377. [Google Scholar] [CrossRef]
- Trillium Compact User Guide. Available online: https://www-iuem.univ-brest.fr/pops/attachments/1489/trilliumcompact_userguide.pdf/ (accessed on 15 May 2023).
- High-Resolution Analog-to-Digital Converter. Available online: https://www.ti.com/lit/ds/symlink/ads1281.pdf (accessed on 9 April 2023).
- Doran, A.K.; Rapa, M.; Laske, G.; Babcock, J.; McPeak, S. Calibration of differential pressure gauges through in situ testing. Earth Space Sci. 2019, 6, 2663–2670. [Google Scholar] [CrossRef]
- Cox, C.; Deaton, T.; Webb, S. A deep-sea differential pressure gauge. J. Atmos. Ocean. Tech. 1984, 1, 237–246. [Google Scholar] [CrossRef]
- Schmidt-Aursch, M.C.; Crawford, W.C. Ocean-Bottom Seismometer. In Encyclopedia of Earthquake Engineering; Beer, M., Kougioumtzoglou, I.A., Patelli, E., Au, S.K., Eds.; Springer: Berlin/Heidelberg, Germany, 2015; pp. 1736–1748. [Google Scholar]
- Albuquerque Seismological Laboratory/USGS. Global Seismograph Network (GSN-IRIS/USGS); International Federation of Digital Seismograph Networks: Schiltach, Germany, 2014. [CrossRef]
- Albuquerque Seismological Laboratory (ASL)/USGS. New China Digital Seismograph Network; International Federation of Digital Seismograph Networks: Schiltach, Germany, 1992. [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Main Materials | Weight in Air/kg | Buoyancy /kg | Weight in Water/kg |
|---|---|---|---|---|
| Framework | Titanium alloy | 9.1 | 2.7 | 6.4 |
| Main acoustic releaser | Duplex stainless steel | 26.0 | 8.0 | 18.0 |
| Sensor releaser | Electrical pure iron | 6.8 | 1.8 | 5.0 |
| Sensor module | Titanium alloy (TC4) | 17.6 | 7.0 | 10.6 |
| DPG | Engineering plastics | 5.5 | 4.3 | 1.2 |
| Pressure vessel | Titanium alloy (TC4) | 44.3 | 19.5 | 24.8 |
| Radio beacon and flasher | Titanium alloy | 1.4 | 0.4 | 1.0 |
| Flag etc. | Engineering plastics | 0.2 | 0.2 | 0.0 |
| Protective housing | Acrylonitrile Butadiene Styrene plastic | 14.9 | 14.6 | 0.4 |
| Cables | - | 1.0 | 0.2 | 0.8 |
| Screws | 316 stainless steel | 2.9 | 0.8 | 2.1 |
| Buoyancy module | Syntactic foam | 124.4 | 219.8 | −95.4 |
| Anchor | Carbon steel | 73.0 | 9.3 | 63.7 |
| Rising | NA | NA | NA | −25.2 |
| Sinking | NA | NA | NA | 38.5 |
| OBS | NA | 327.1 | NA | NA |
| Name | Unit | Pressure Vessel (Sensor Module) | Pressure Vessel (Batteries) |
|---|---|---|---|
| Length of pressure tube | mm | 198 | 557 |
| Diameter of pressure tube | mm | 210 | 210 |
| Weight in air | kg | 14.3 | 30.4 |
| Weight in water | kg | 7.4 | 10.5 |
| Maximum depth before failure | m | 11,665 | 11,407 |
| Safety factor | NA | 1.8 | 1.8 |
| Safe working depth | m | 6480 | 6337 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, D.; Yang, T.; Wang, Y.; Wu, Y.; Huang, X. Pankun: A New Generation of Broadband Ocean Bottom Seismograph. Sensors 2023, 23, 4995. https://doi.org/10.3390/s23114995
Liu D, Yang T, Wang Y, Wu Y, Huang X. Pankun: A New Generation of Broadband Ocean Bottom Seismograph. Sensors. 2023; 23(11):4995. https://doi.org/10.3390/s23114995
Chicago/Turabian StyleLiu, Dan, Ting Yang, Yizhi Wang, Yuechu Wu, and Xinfeng Huang. 2023. "Pankun: A New Generation of Broadband Ocean Bottom Seismograph" Sensors 23, no. 11: 4995. https://doi.org/10.3390/s23114995
APA StyleLiu, D., Yang, T., Wang, Y., Wu, Y., & Huang, X. (2023). Pankun: A New Generation of Broadband Ocean Bottom Seismograph. Sensors, 23(11), 4995. https://doi.org/10.3390/s23114995