


The Effects Analysis of Contact Stiffness of Double-Row Tapered Roller Bearing under Composite Loads


Abstract
:1. Introduction
2. Calculation Method for Contact Stiffness of Double-Row Tapered Roller Bearings
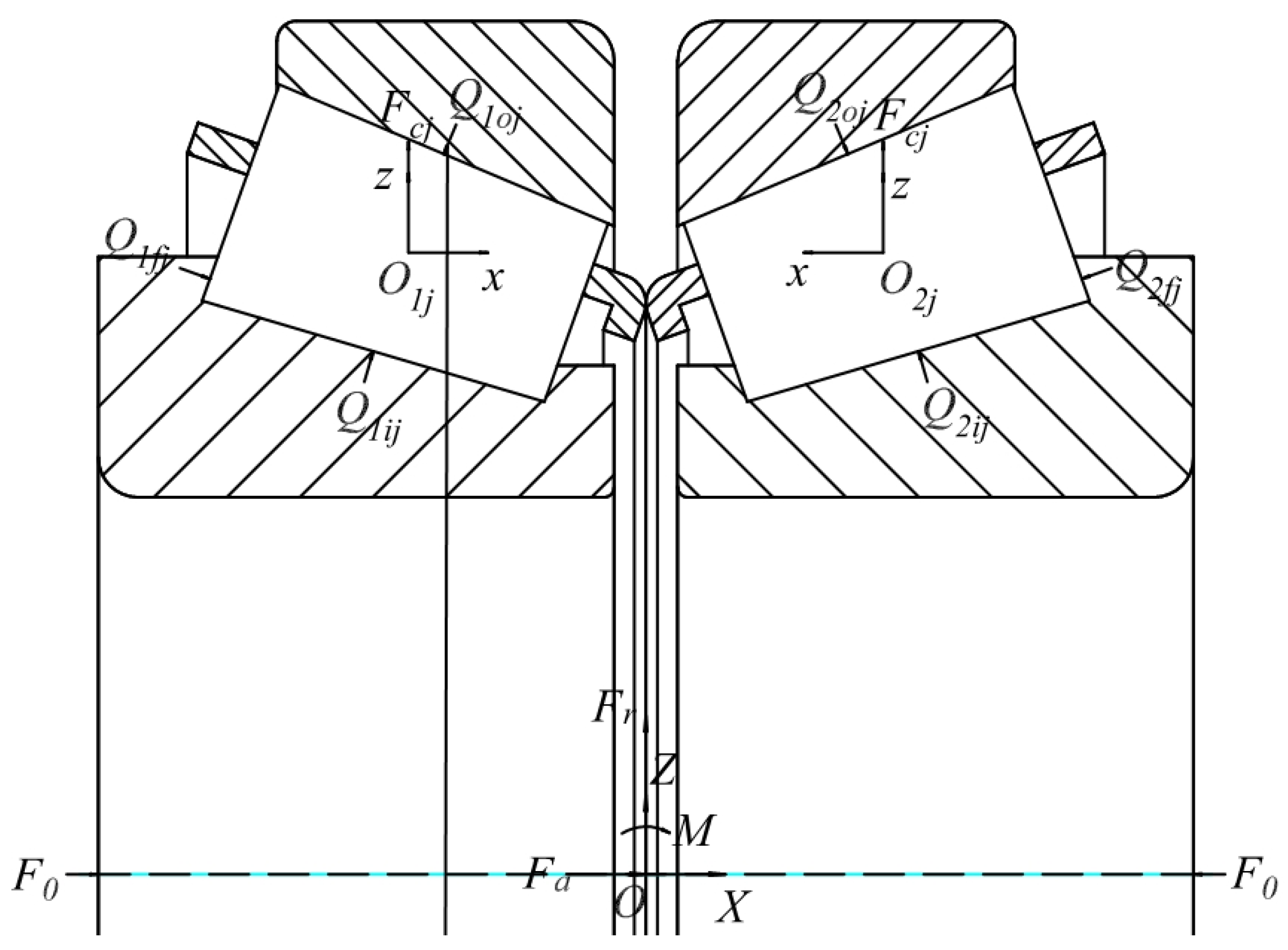
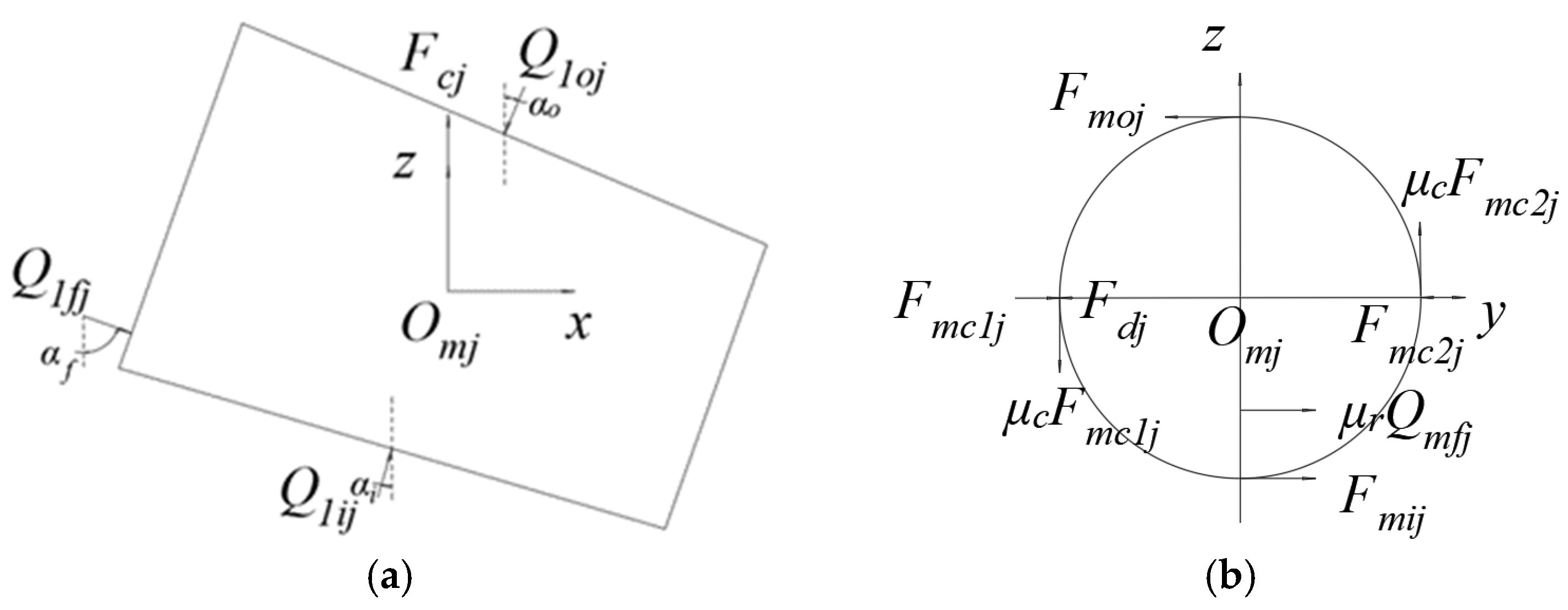
2.1. Force Analysis of Double-Row Tapered Roller Bearings
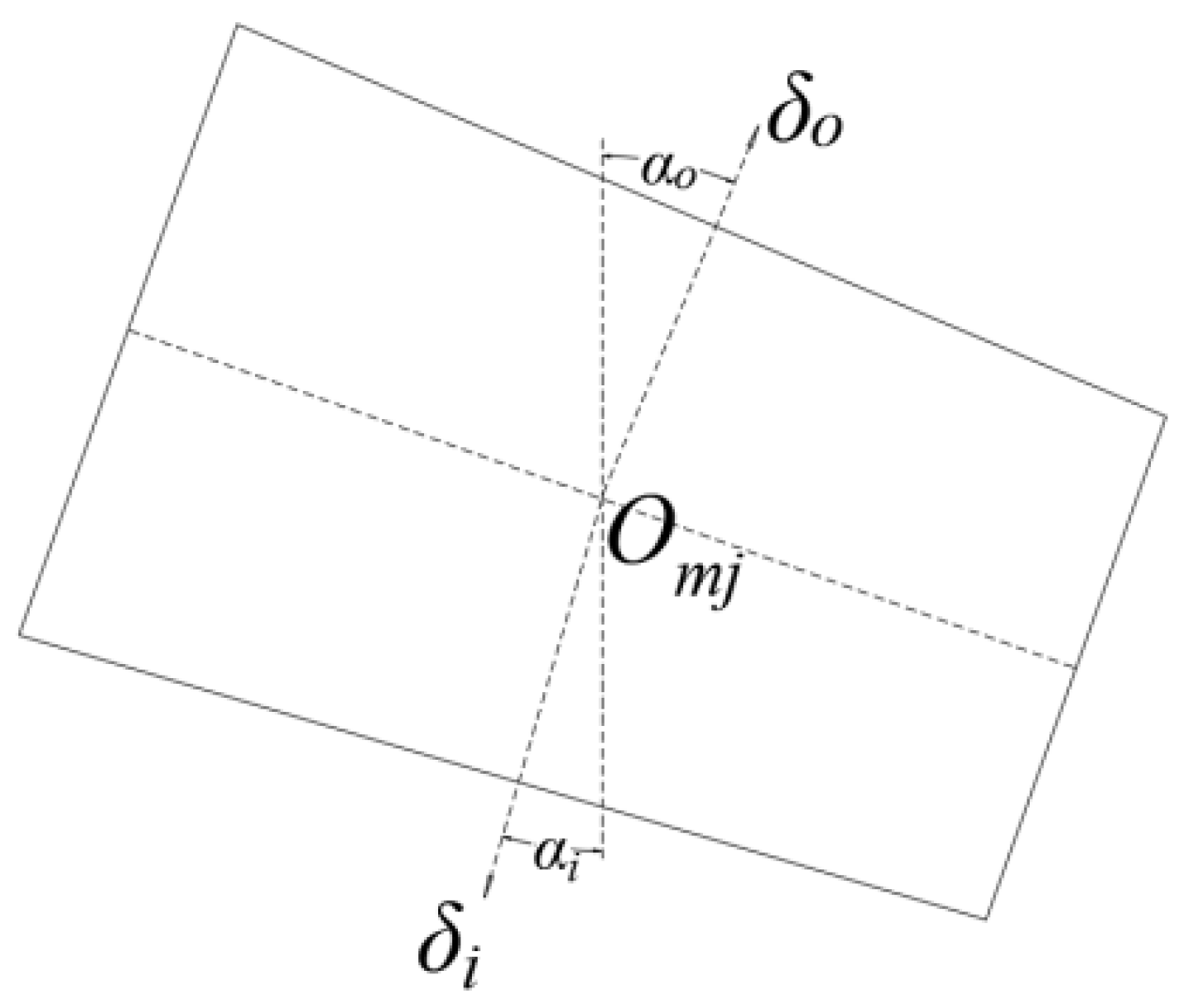
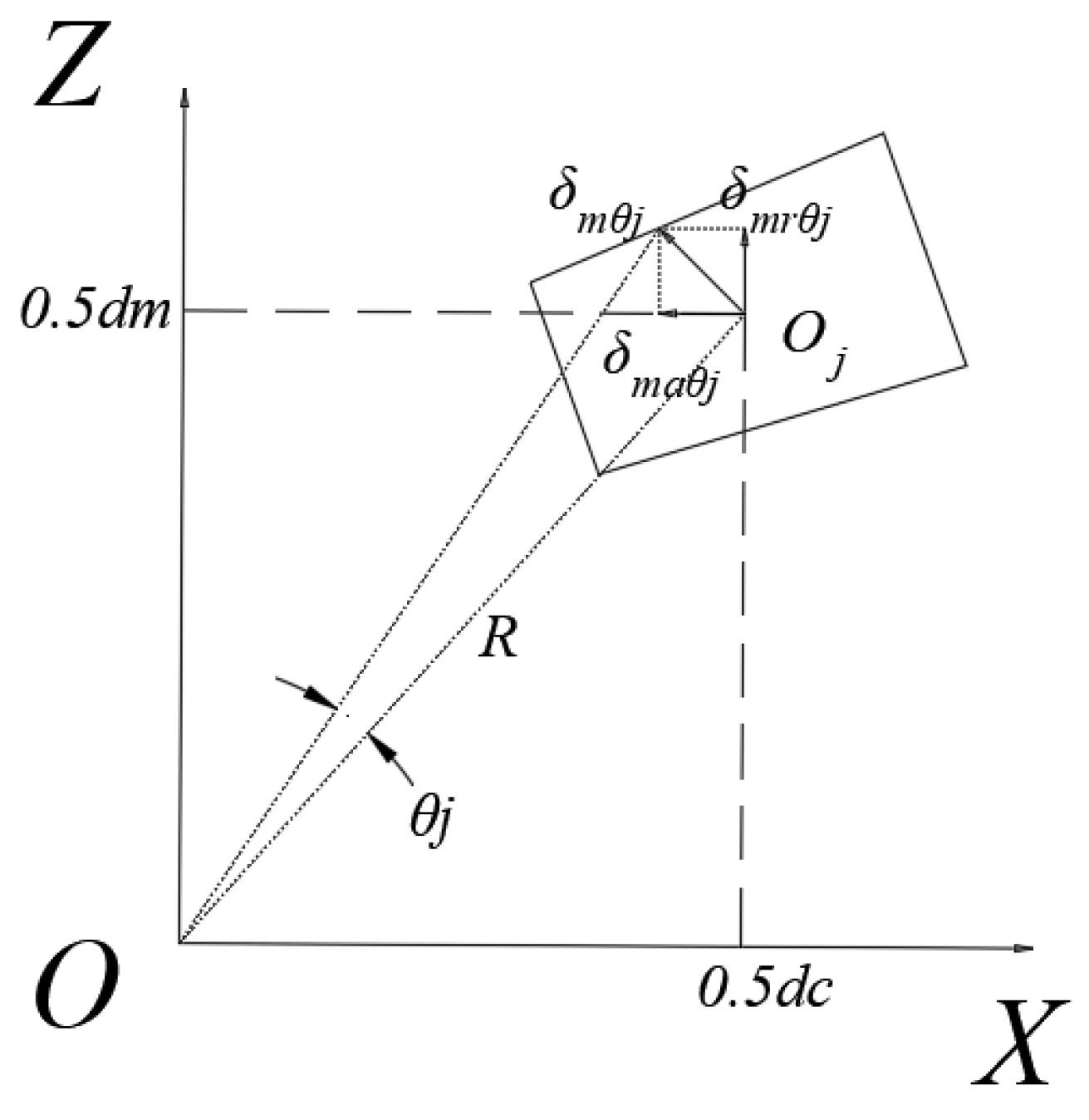
2.2. Relationship between Load and Deformation
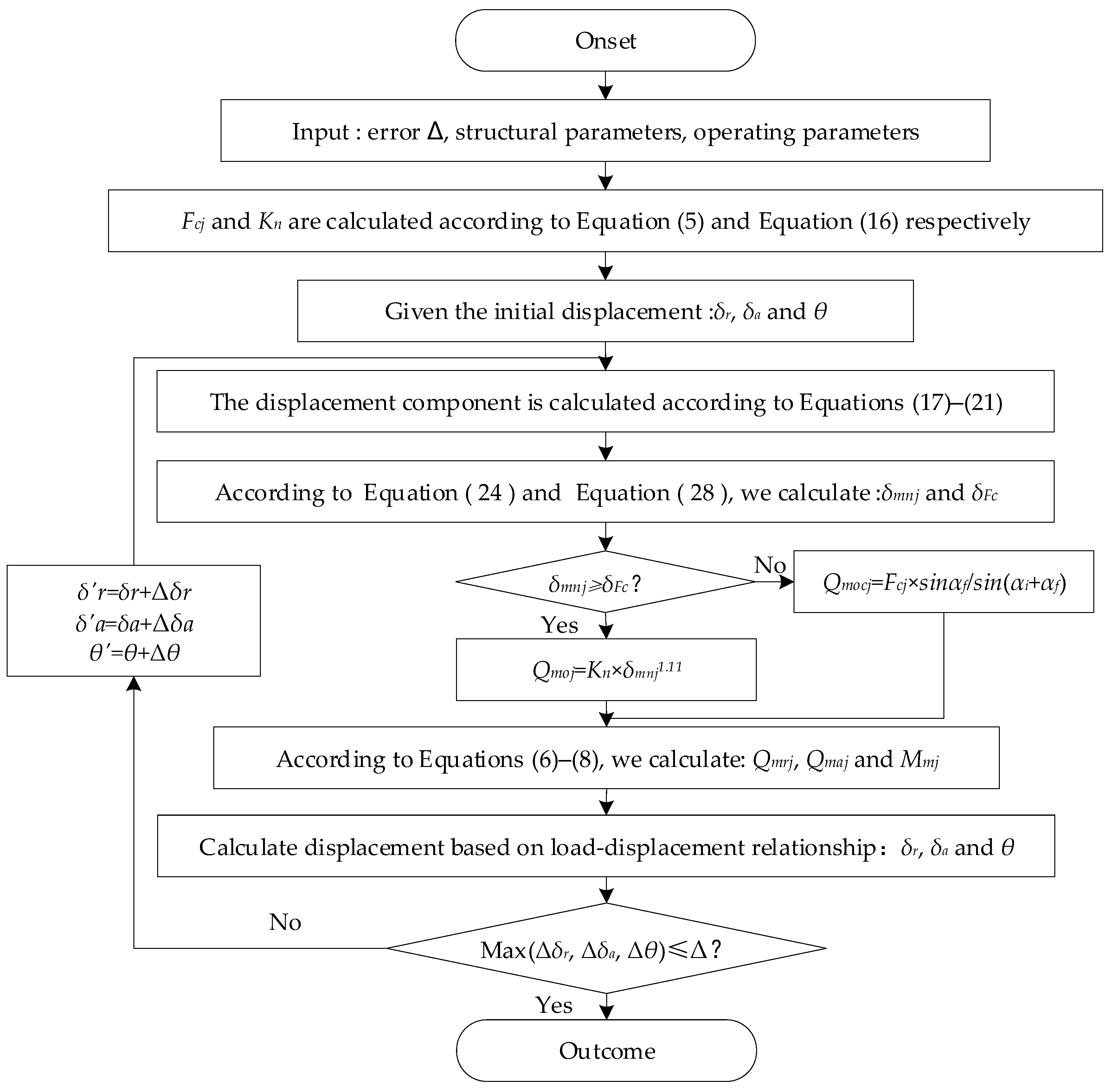
2.3. Contact Load Calculation Process
2.4. Calculation Method of Contact Stiffness
3. Distribution Characteristics and Influence Analysis of Contact Stiffness under Complex Loading Conditions
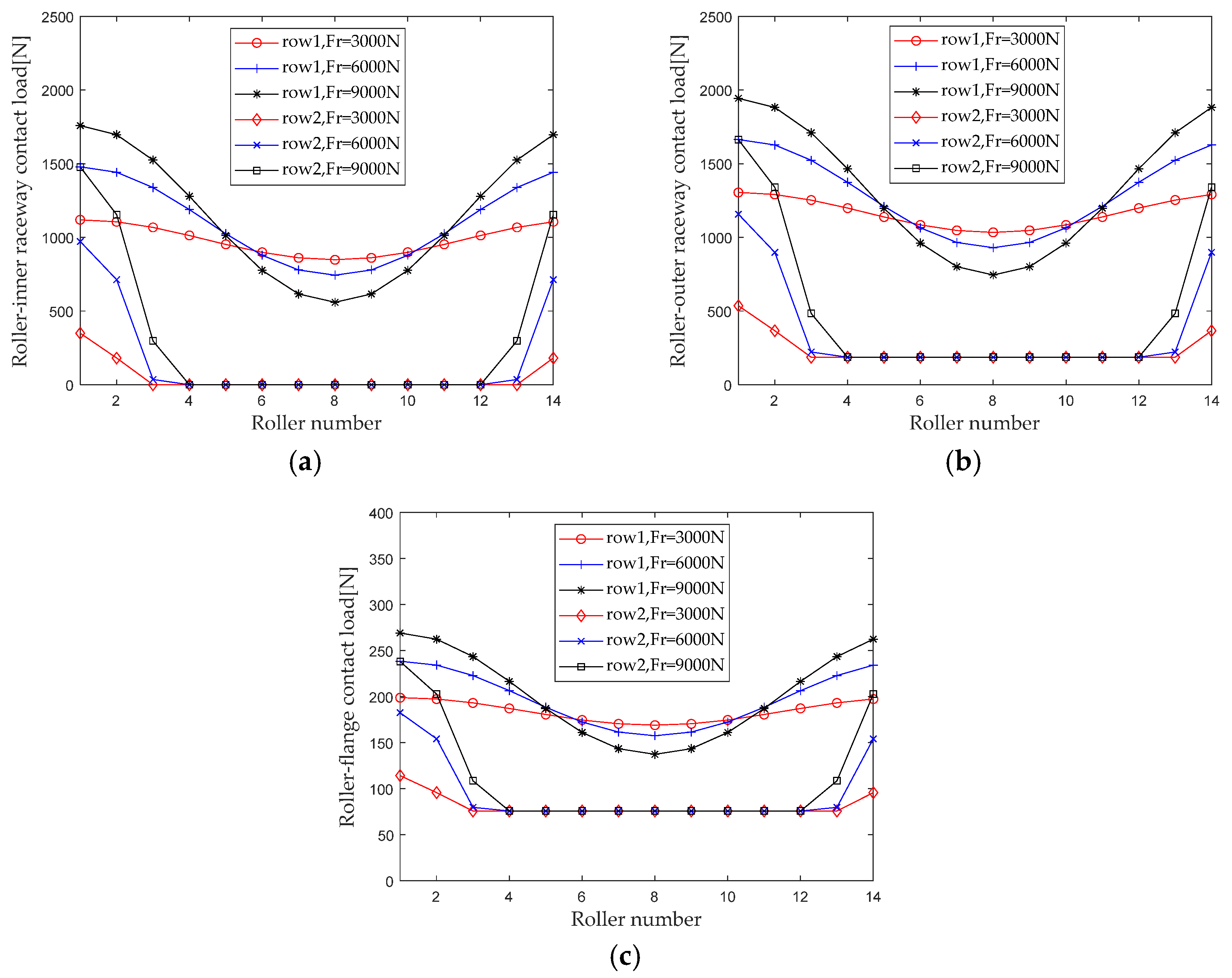
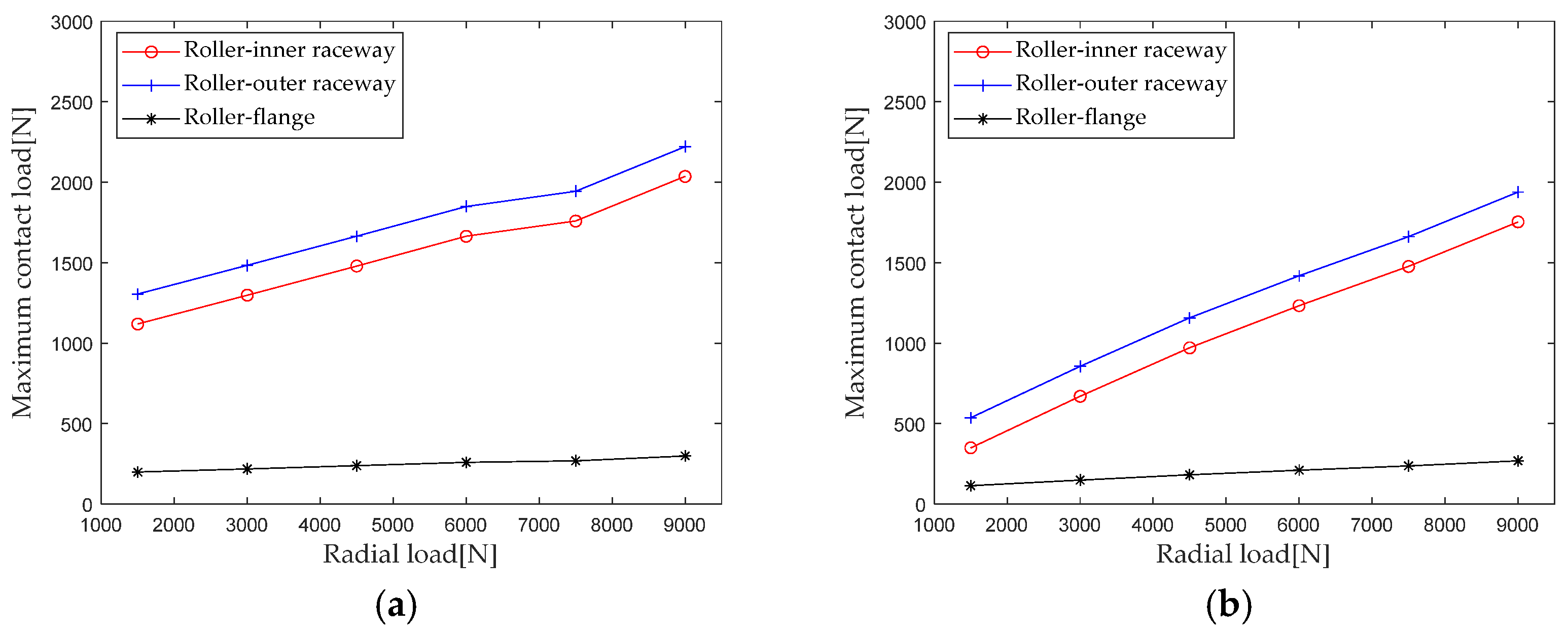
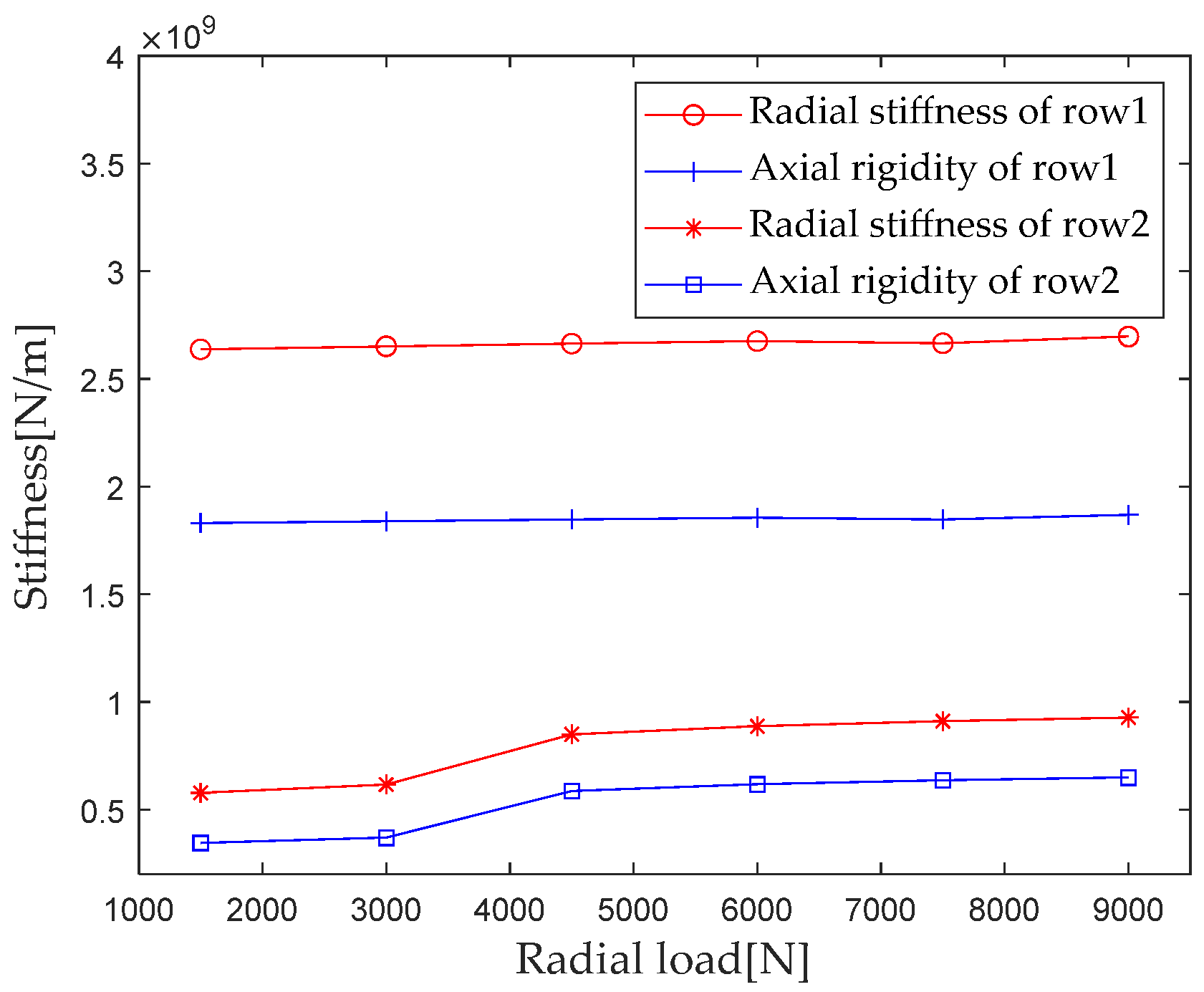
3.1. Effect of Radial Load on Stiffness Distribution
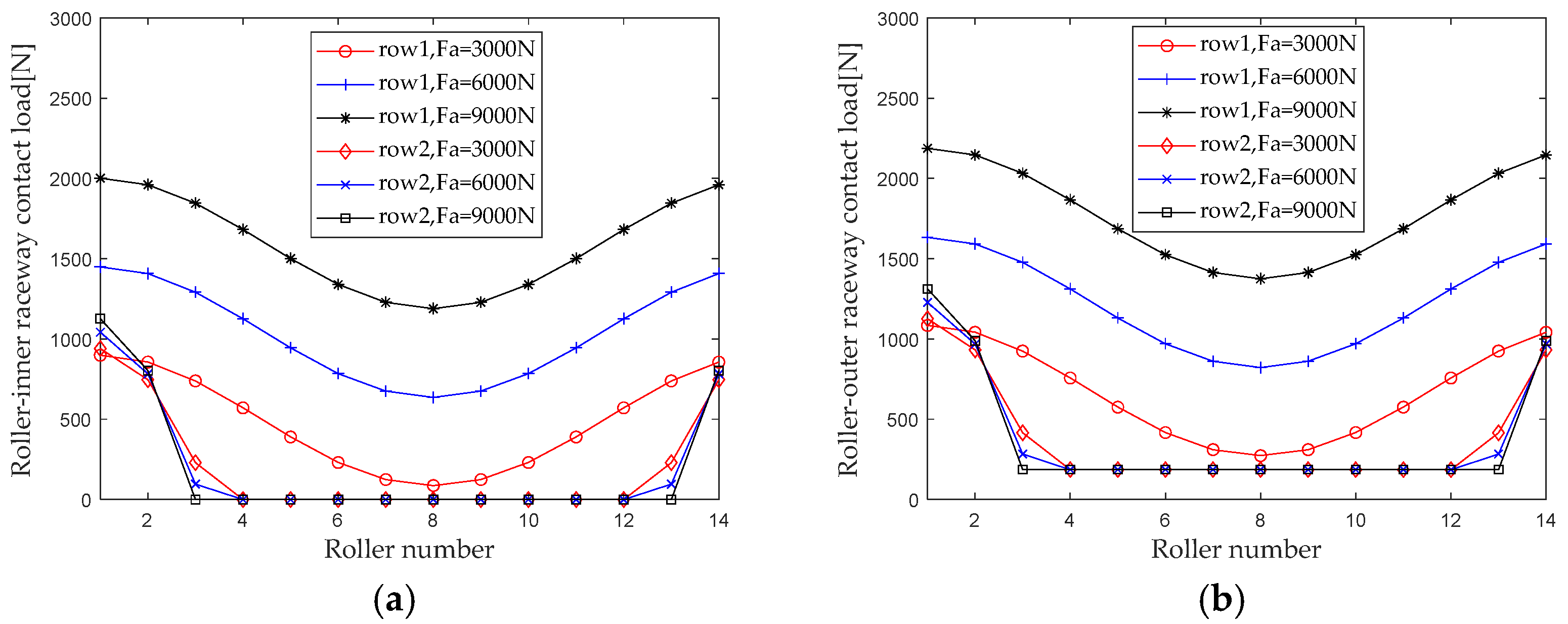
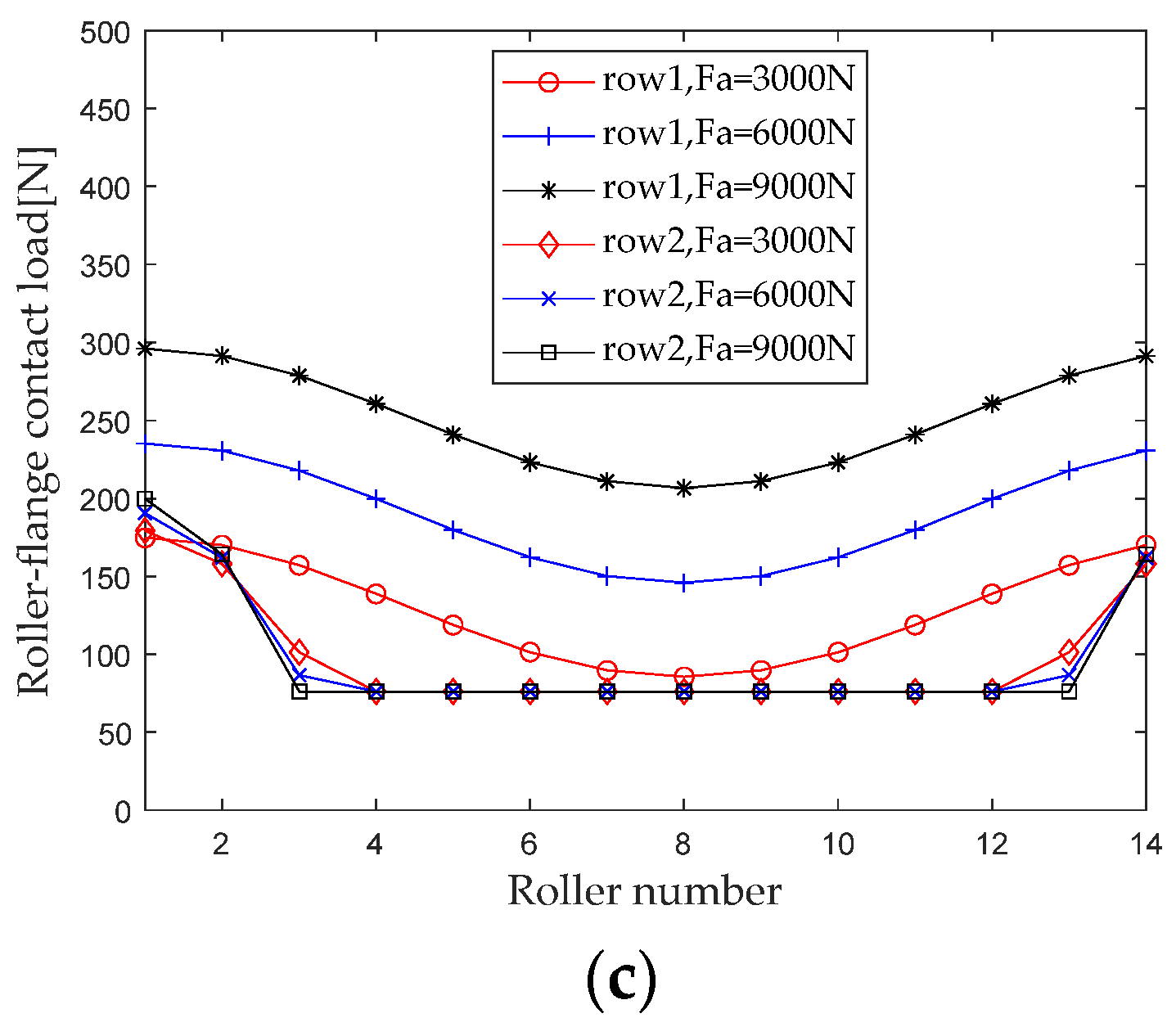
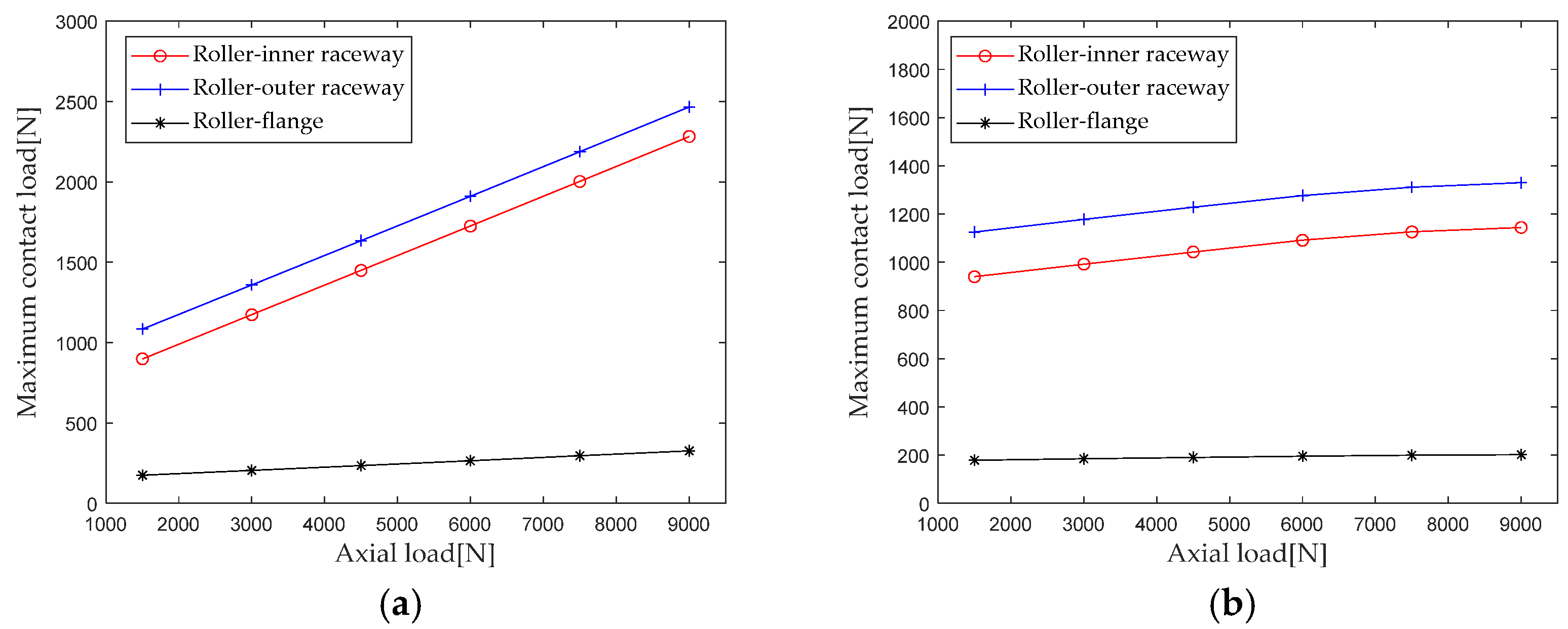
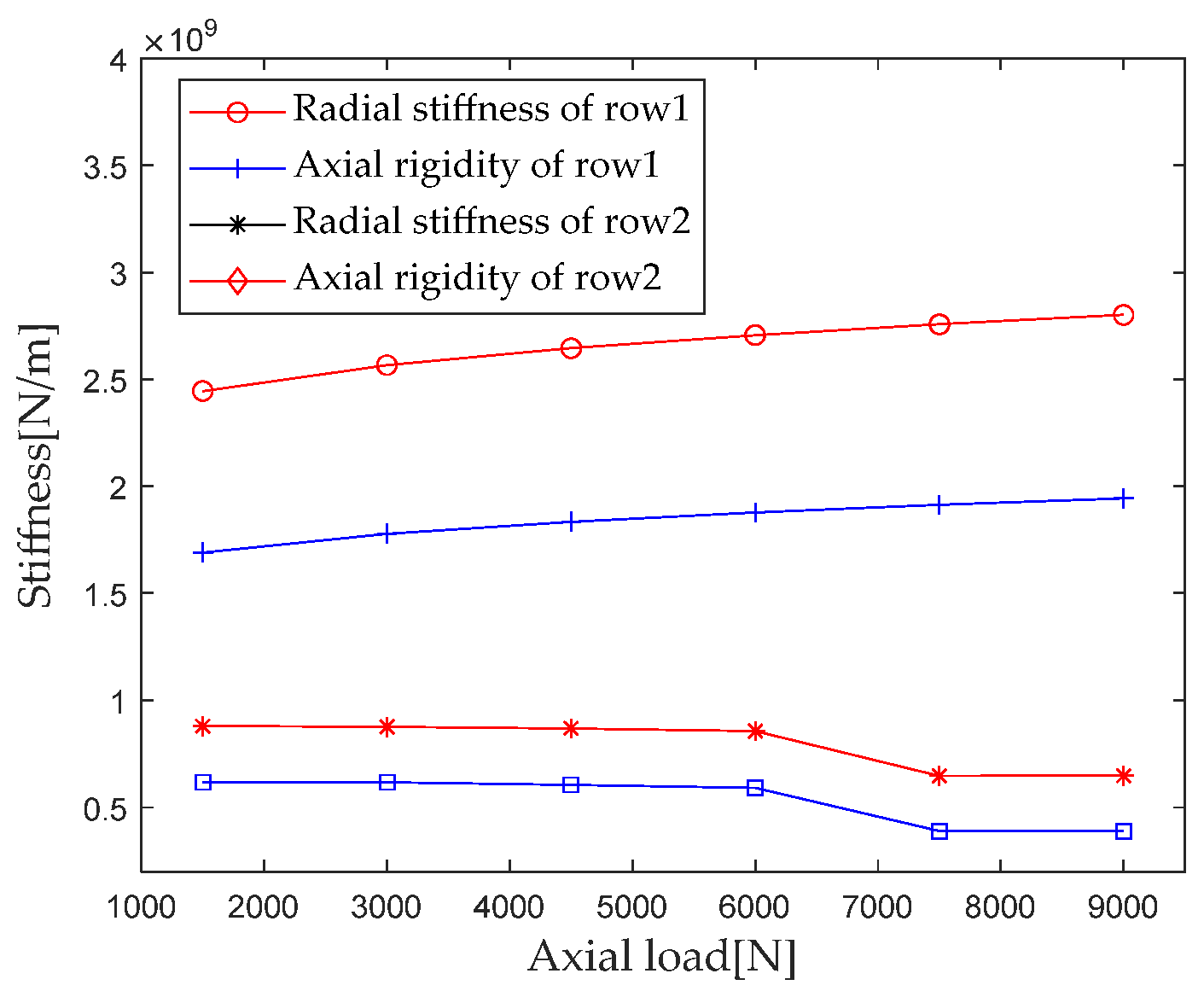
3.2. Effect of Axial Load on Stiffness Distribution
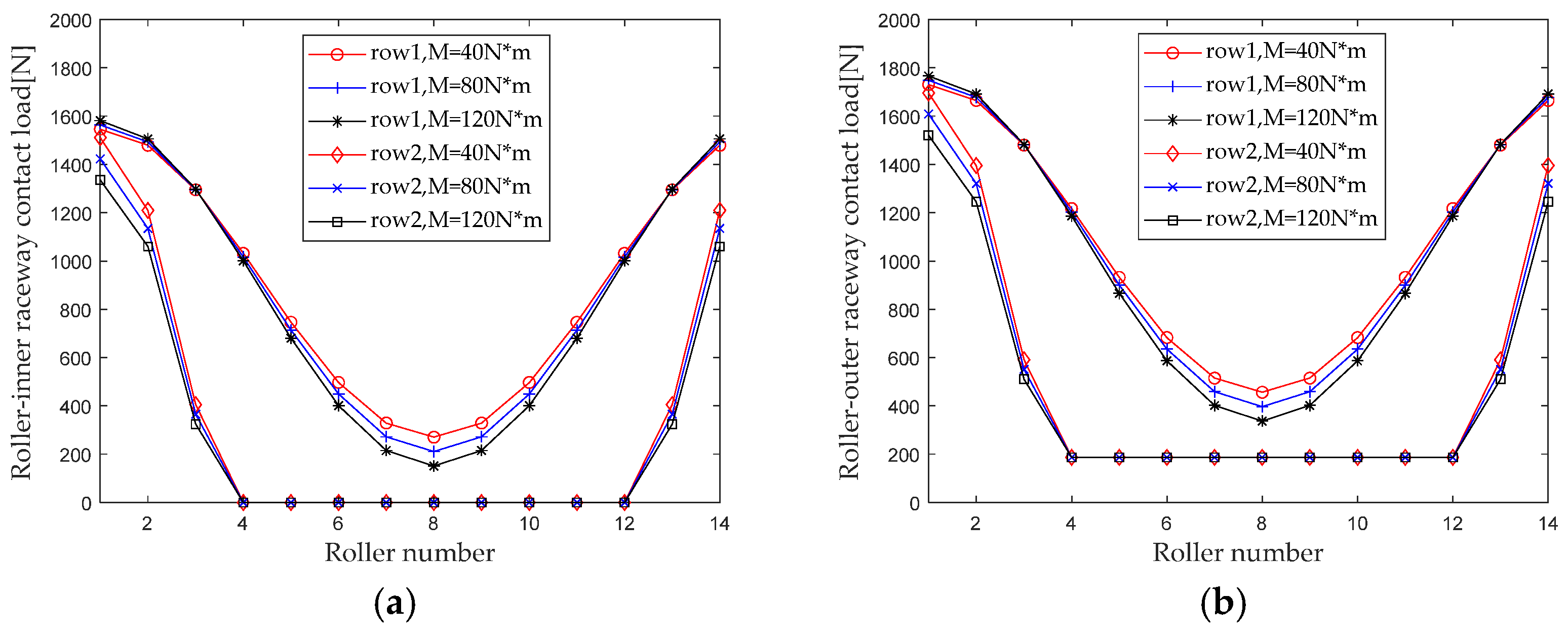
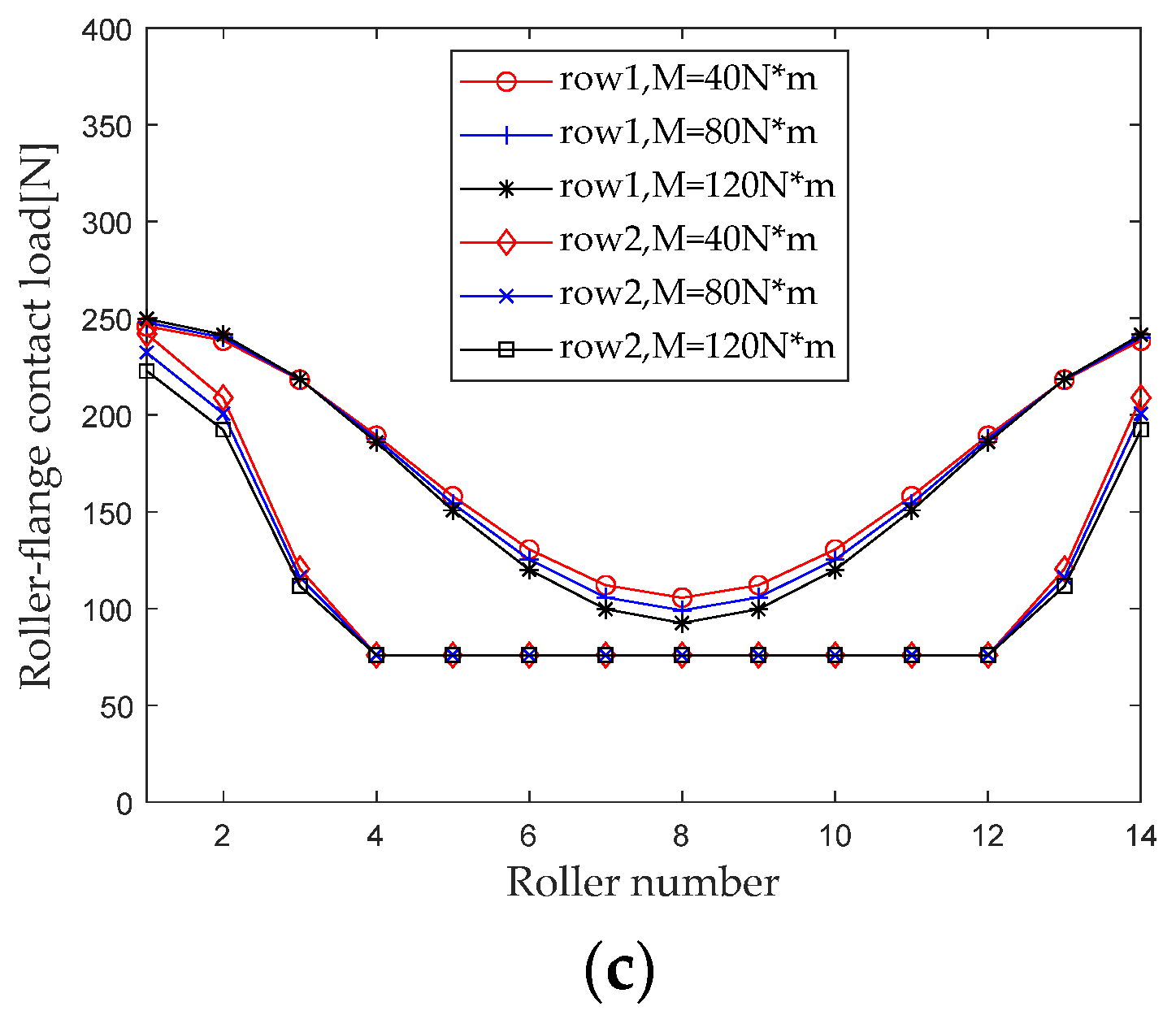
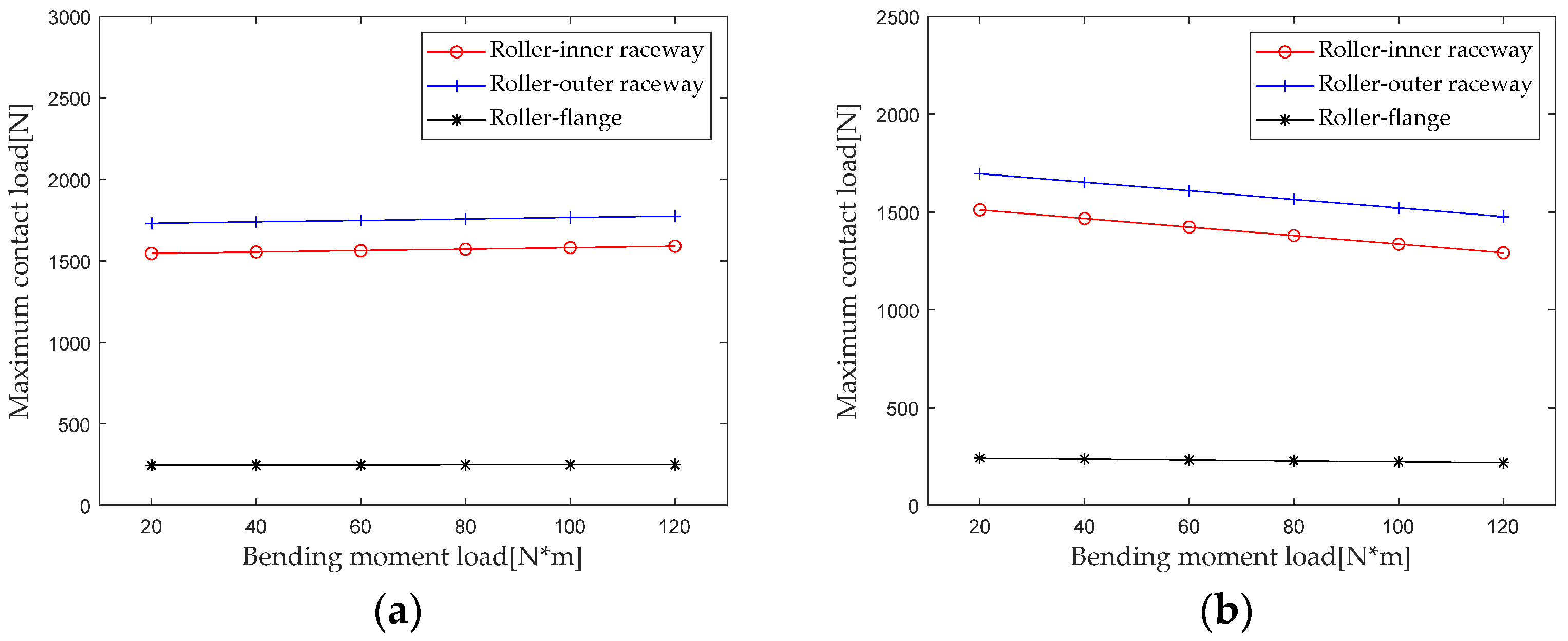
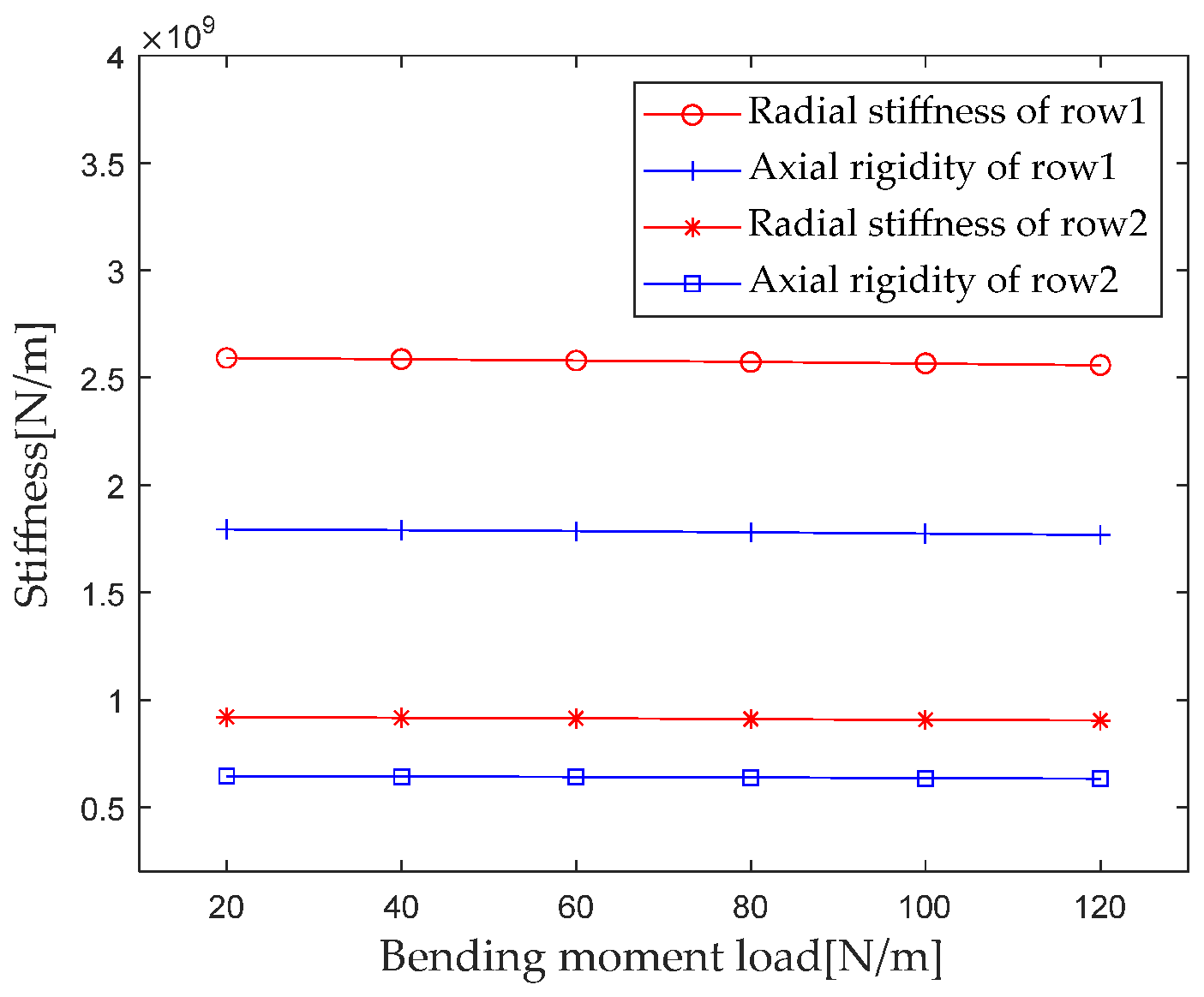
3.3. Effect of Bending Moment Load on Stiffness Distribution
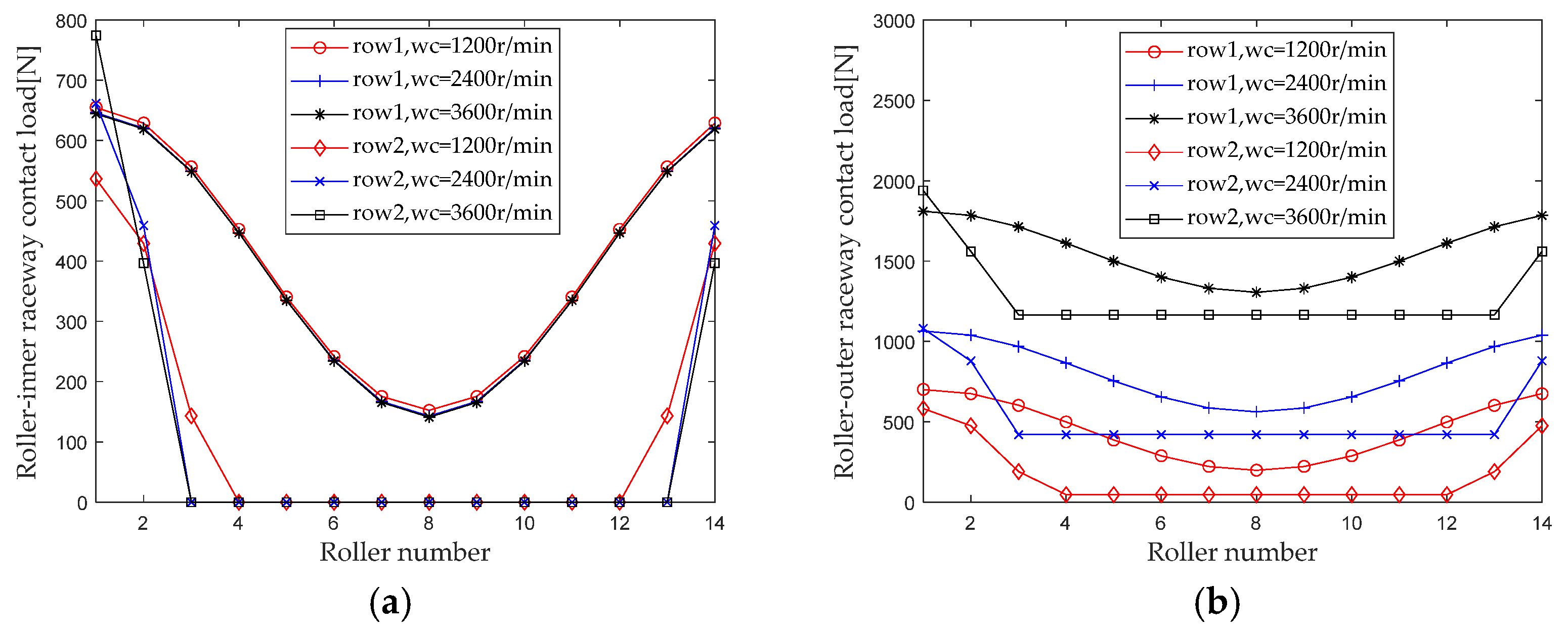
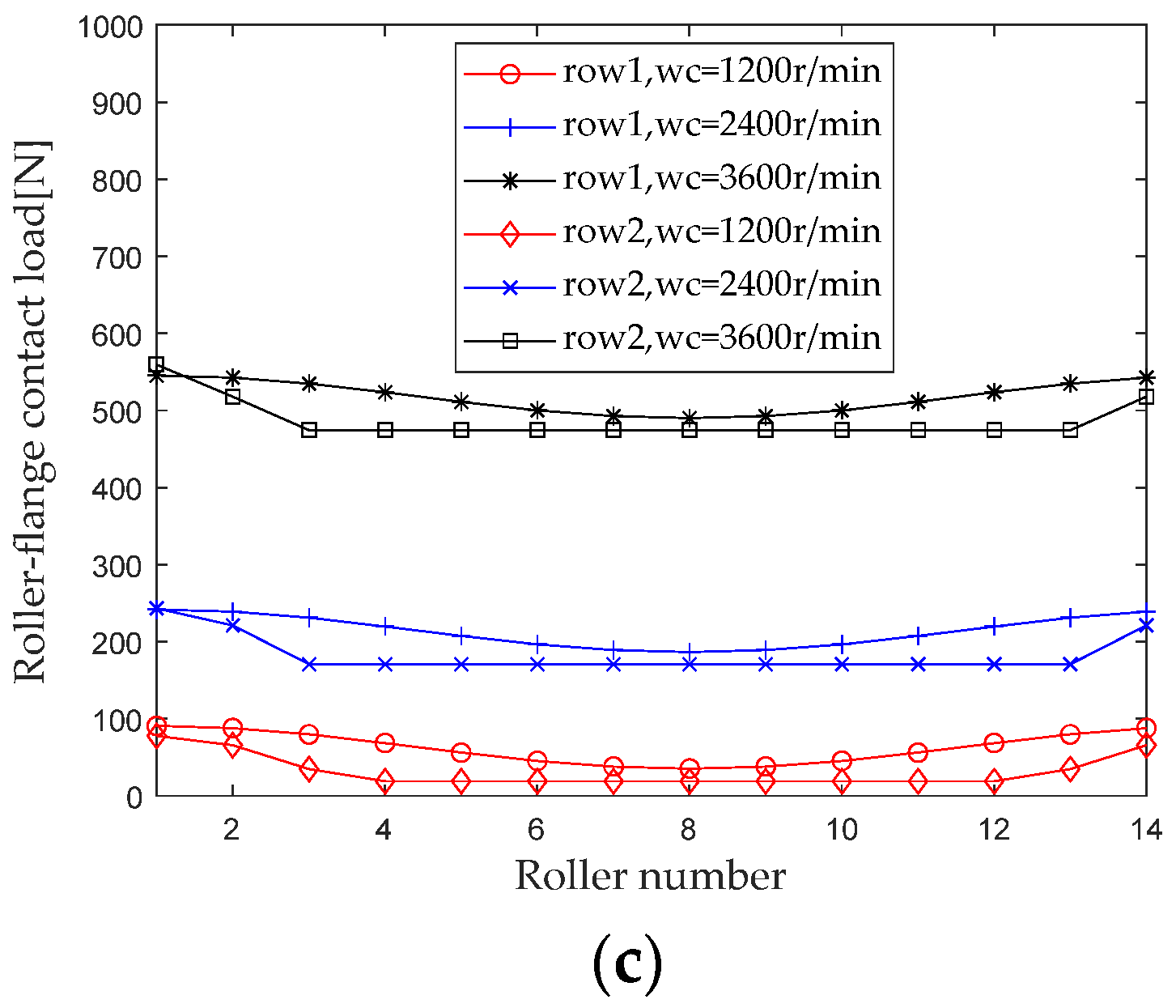
3.4. Effect of Rotational Speed on Stiffness Distribution
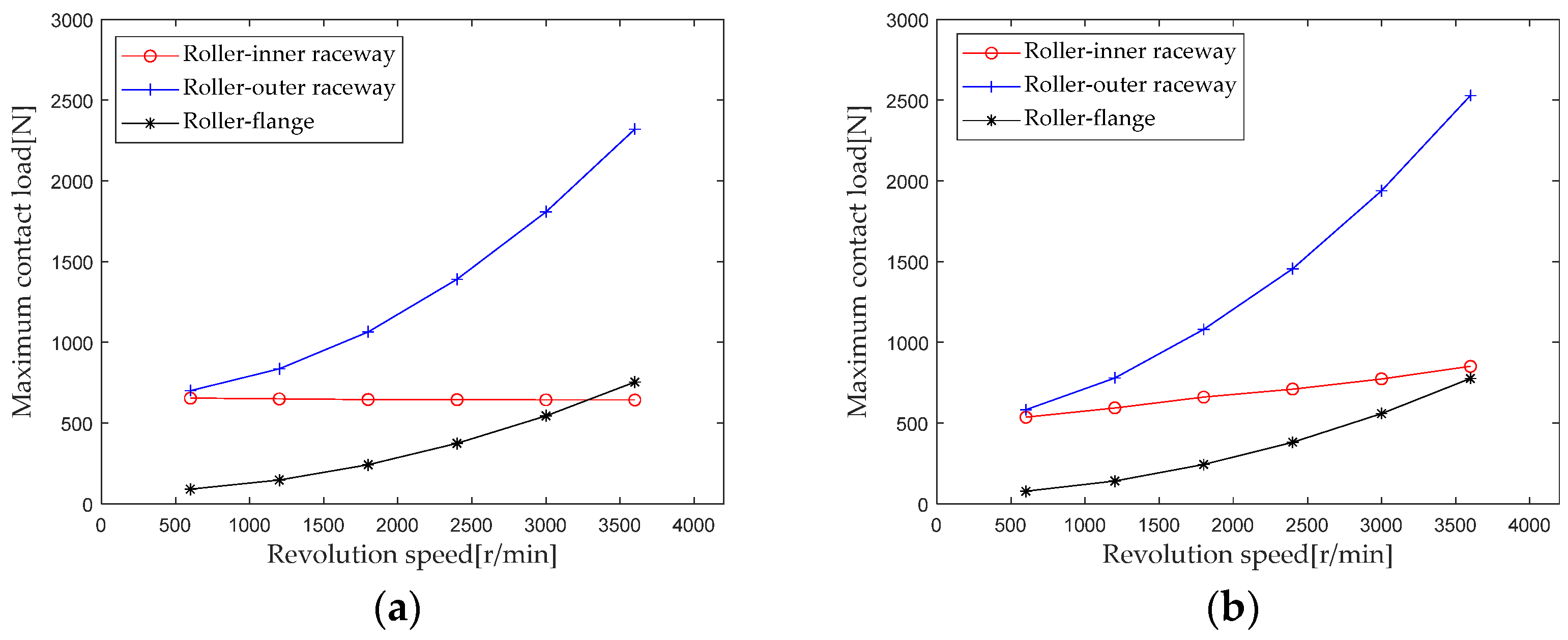
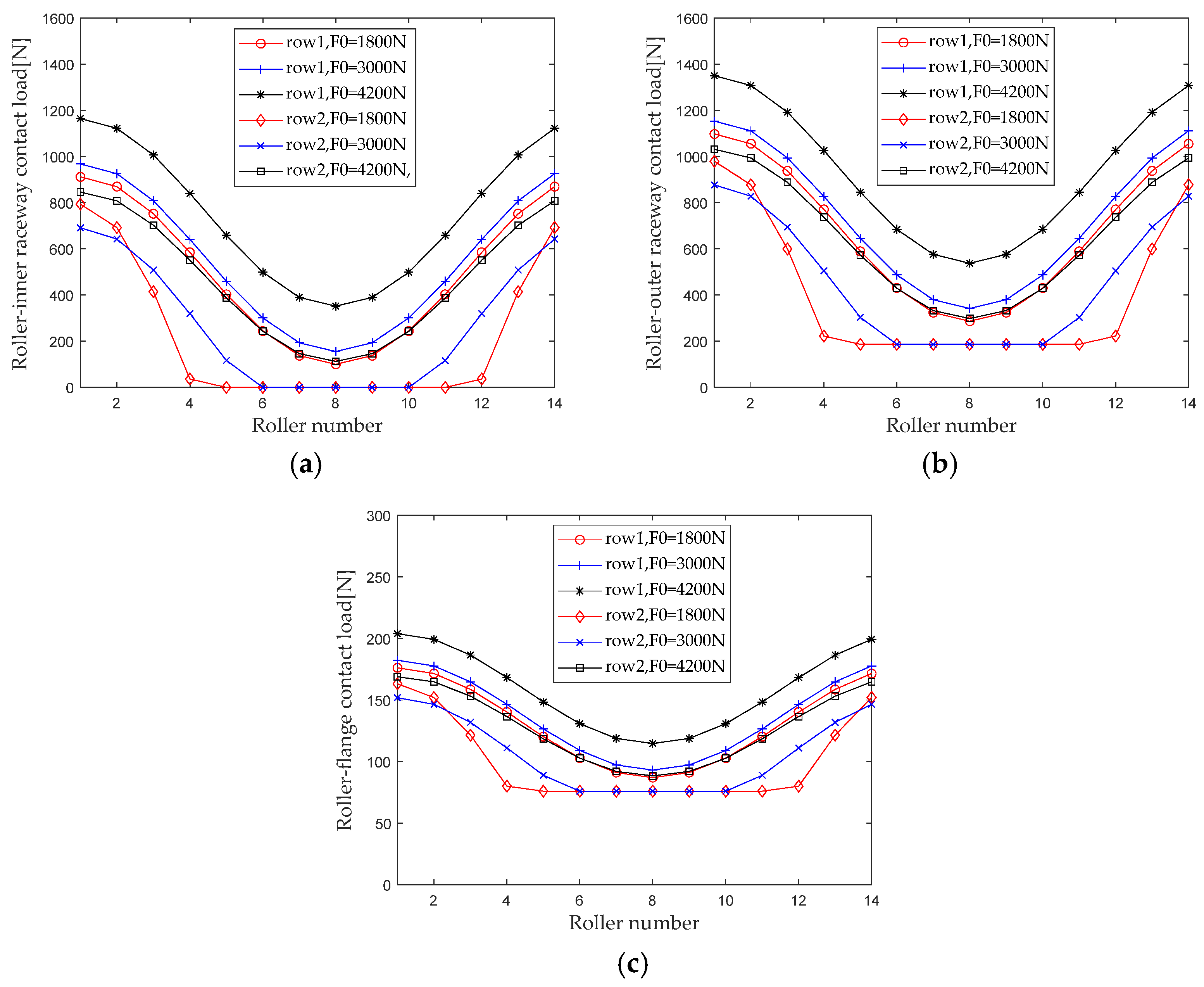
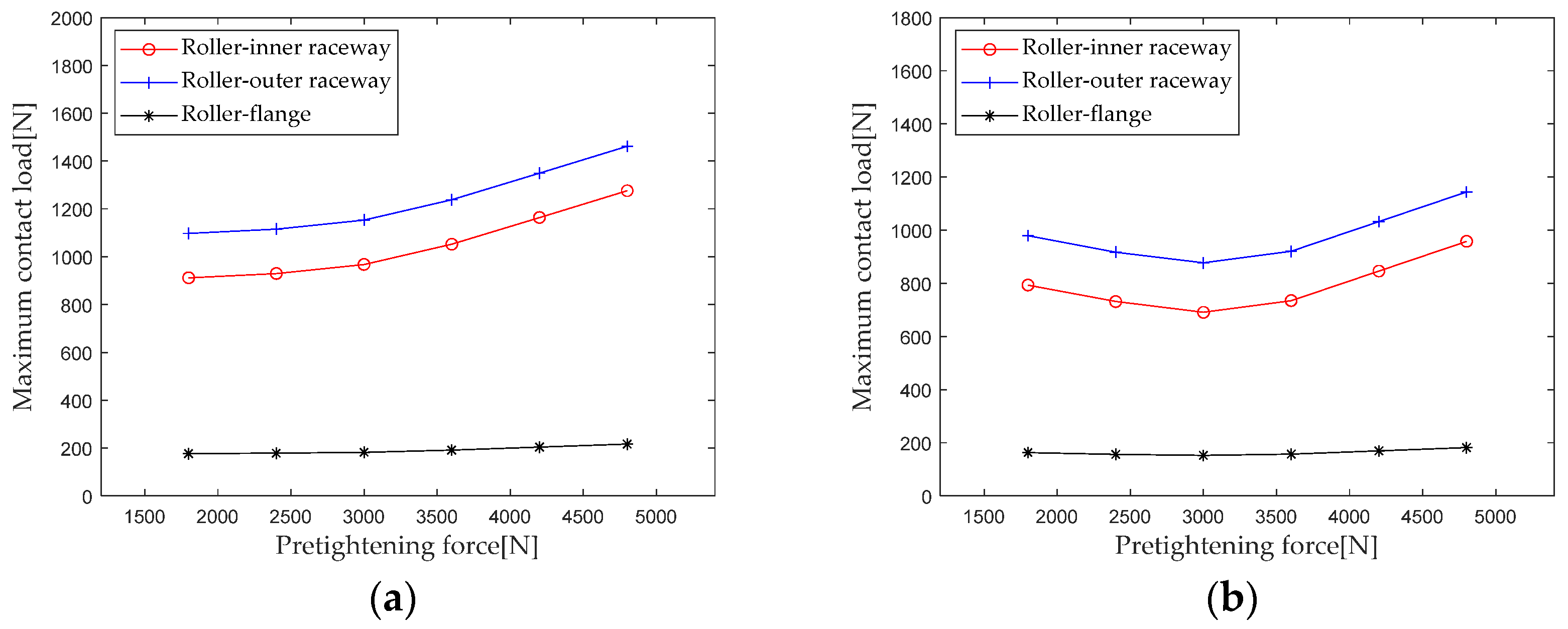
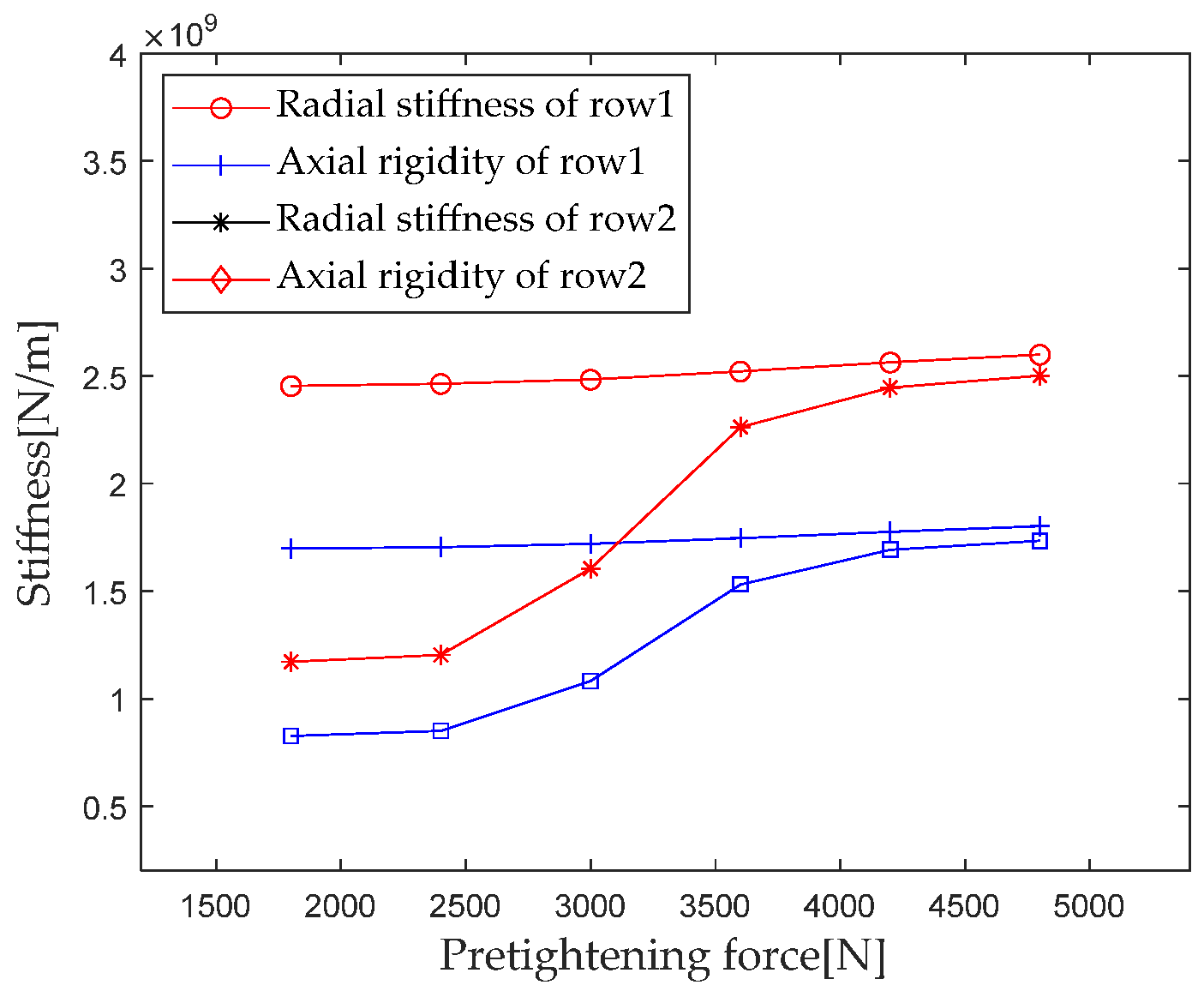
3.5. Effect of Preload on Stiffness Distribution
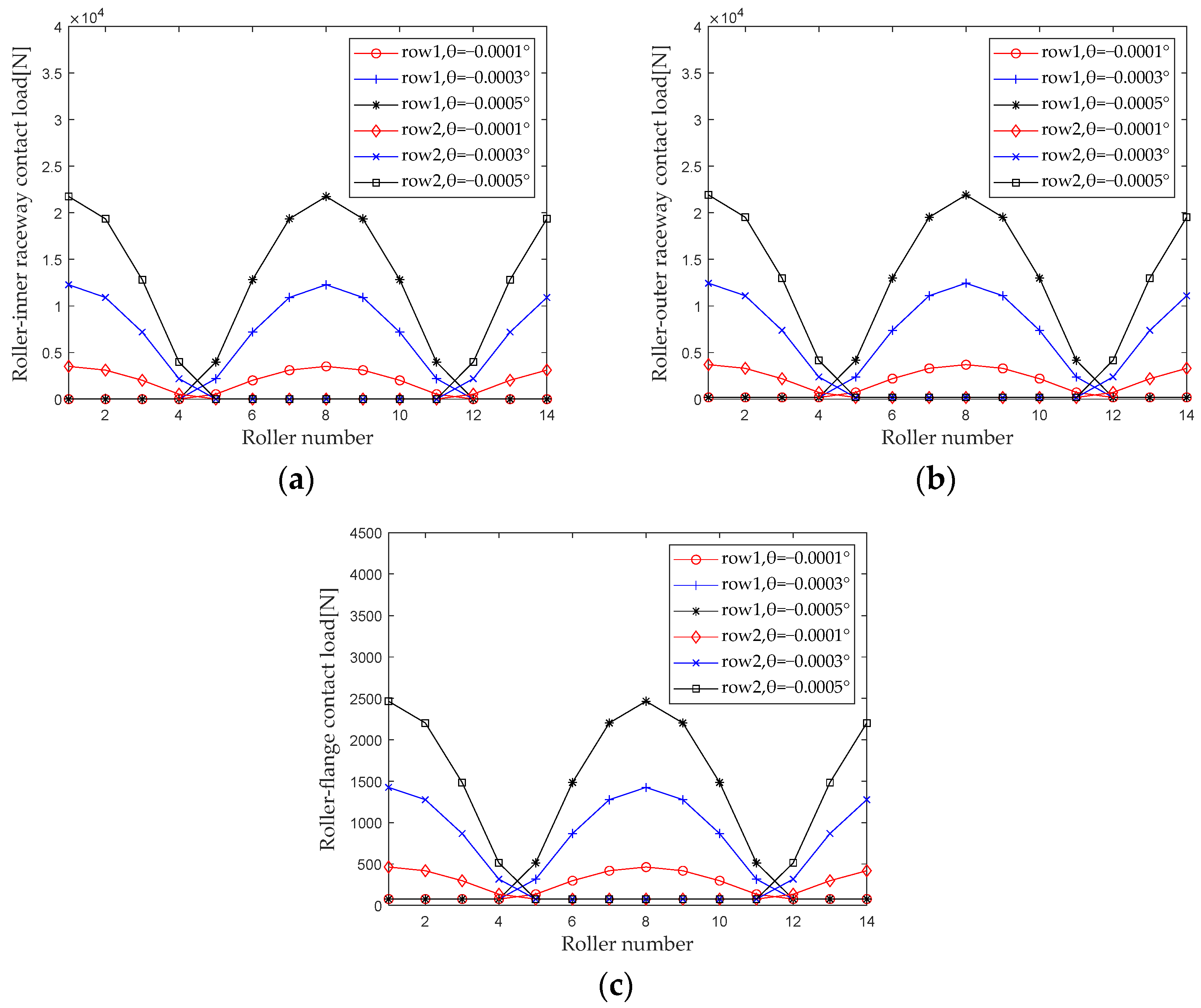
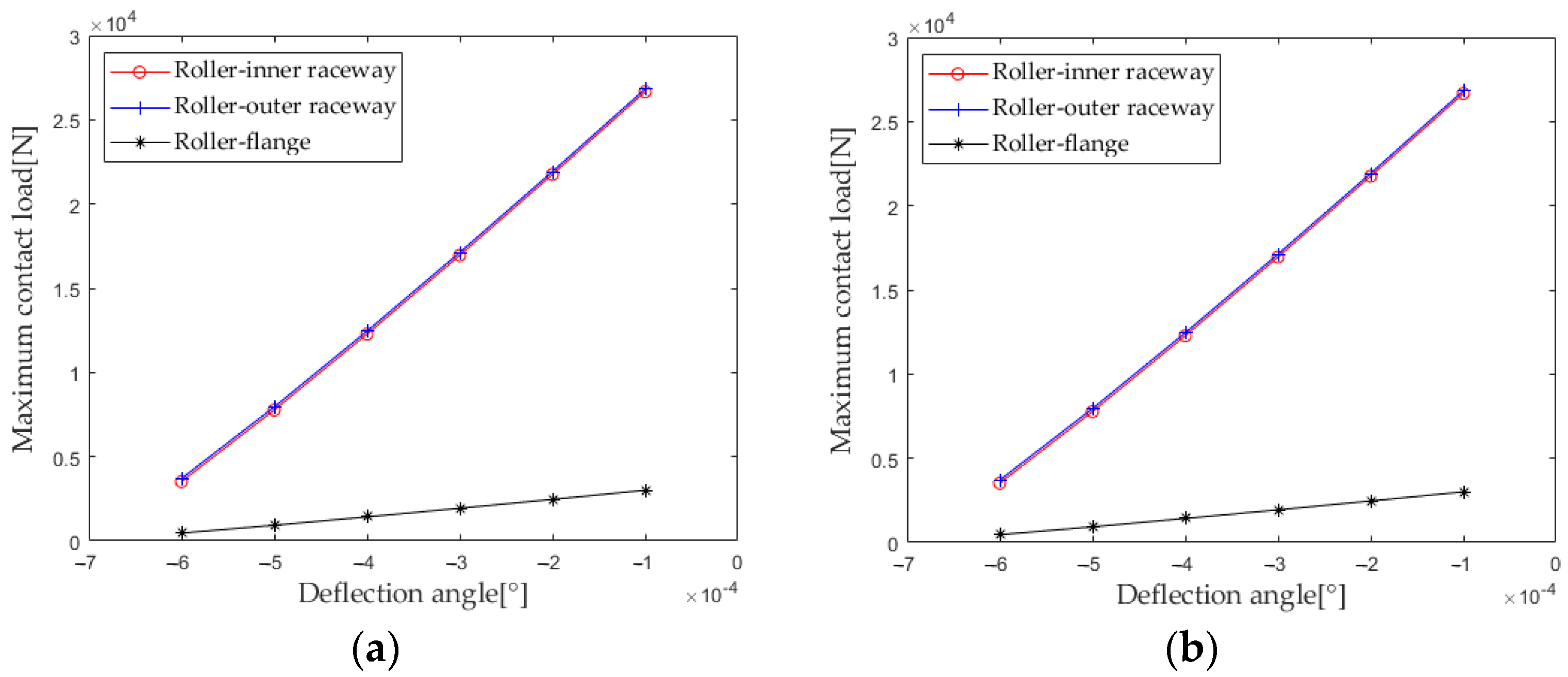
3.6. Effect of Deflection Angle on Stiffness Distribution
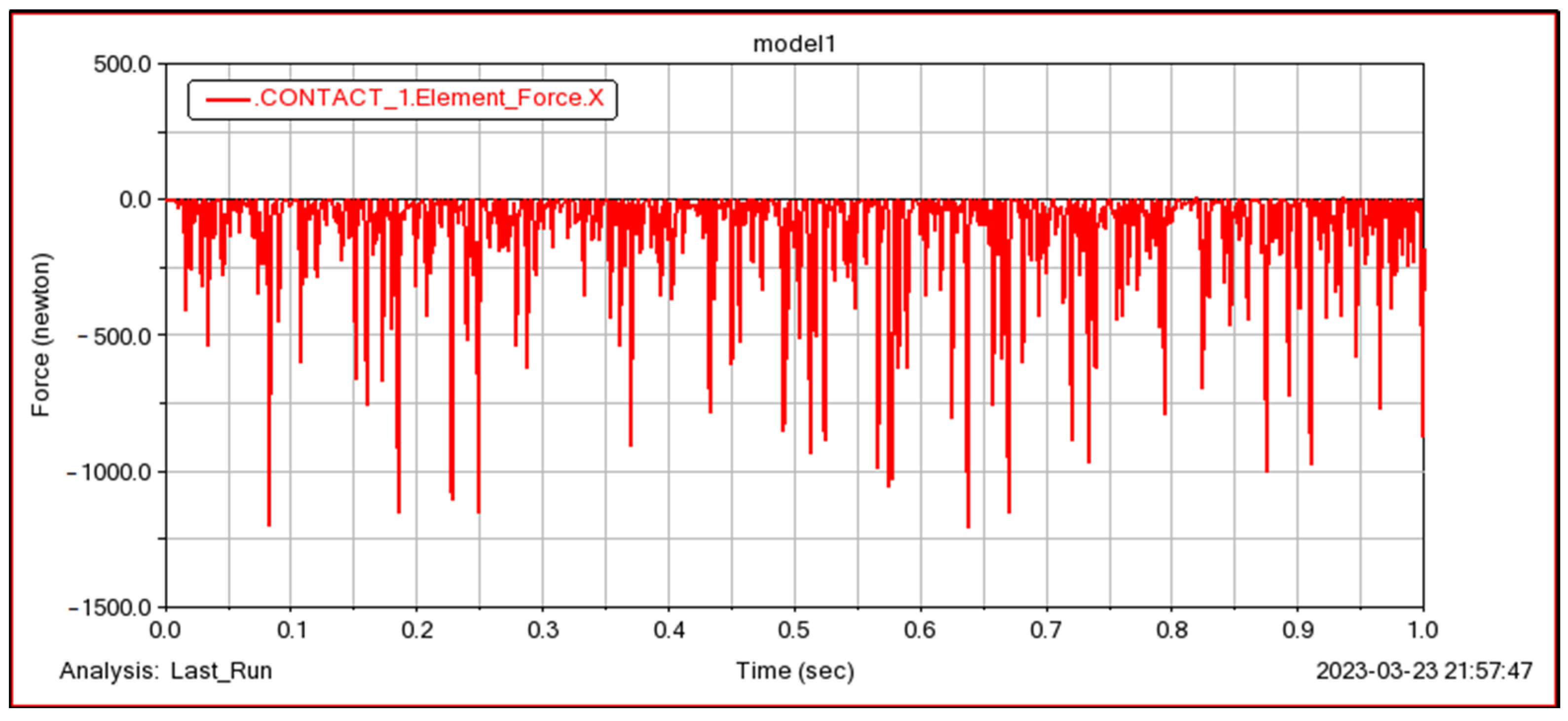
4. Simulation Verification and Comparison
5. Conclusions and Prospect
- (1)
- The contact load calculation results of roller-inner raceway, roller-outer raceway and roller-rib obtained using the model and method proposed in this paper are in good agreement with the Adams simulation results, and the maximum relative error is within 8%, which can provide some guidance for engineering application.
- (2)
- Under a radial load, as the radial load increases, when the contact between the roller and the raceway increases, the second row of bearings will have a “sudden increase phenomenon”. Under an axial load, as the radial load increases and the contact between the roller and raceway decreases, the second row of bearings will experience a “sudden decrease phenomenon”. The influence of bending moment load on stiffness is very small. When the rotational speed increases, the contact between the roller and the raceway will decrease, and the second row of bearings will have a “sudden decrease phenomenon”. As the axial preload increases, the second row of rollers gradually changes from partially loaded to fully loaded, and the stiffness increases rapidly. The axial preload has the greatest impact on the bearing stiffness. As the deflection angle increases, the stiffness steadily increases, and the axial stiffness of the first and second columns is completely equal.
- (3)
- There is an optimal preload that minimizes the maximum contact load of the roller when other load conditions remain unchanged for a double-row tapered roller bearing. This effect of preload on the maximum contact load can provide guidance for applying preload in engineering applications.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Darmo, S.; Bahiuddin, I.; Handoko, P.; Priatomo, H.R.; Kuncoro, M.; Priyambodo, S.; Haryanto; Rahman, N.F.; Kanosri, A.M.; Winarno, A. Failure analysis of double-row tapered roller bearing outer ring used in Coal Wagon Wheelset. Eng. Fail. Anal. 2022, 135, 106153. [Google Scholar] [CrossRef]
- Liu, J.; Chai, X. The development history of rolling bearings for railway freight cars in China. China Acad. J. Electron. Publ. House 2005, 43, 10–18. (In Chinese) [Google Scholar]
- Yan, K.; Wang, N.; Zhai, Q.; Zhu, Y.; Zhang, J.; Niu, Q. Theoretical and experimental investigation on the thermal characteristics of double-row tapered roller bearings of high speed locomotive. Int. J. Heat Mass Transf. 2015, 84, 1119–1130. [Google Scholar] [CrossRef]
- Zha, H.; Ren, Z.; Ning, X. Load Characteristics of Axle Box Bearing Raceway of High-speed EMU. J. Mech. Eng. 2020, 56, 4–142. (In Chinese) [Google Scholar]
- Feng, K.; Ji, J.C.; Ni, Q.; Beer, M. A review of vibration-based gear wear monitoring and prediction techniques. Mech. Syst. Signal Process. 2023, 182, 109605. [Google Scholar] [CrossRef]
- Petersen, D.; Howard, C.; Sawalhi, N.; Ahmadi, A.M.; Singh, S. Analysis of bearing stiffness variations, contact forces and vibrations in radially loaded double row rolling element bearings with raceway defects. Mech. Syst. Signal Process. 2015, 50–51, 139–160. [Google Scholar] [CrossRef]
- Xu, H.; Zhai, J.; Liang, J.; Chen, Y.; Han, Q. Time-varying stiffness characteristics of roller bearing influenced by thermal behavior due to surface frictions and different lubricant oil temperatures. Tribol. Int. 2020, 144, 106125. [Google Scholar]
- Guo, Y.; Parker, R.G. Stiffness matrix calculation of rolling element bearings using a finite element/contact mechanics model. Mech. Mach. Theory 2012, 51, 5–45. [Google Scholar] [CrossRef]
- Liu, X.; He, T.; Yan, Y.; Meng, L.; Dong, J.; Guo, Y.; Zhou, P. Effects of axial offset and deflection on load-bearing characteristics of the permanent magnet bearing. Eng. Fail. Anal. 2023, 146, 107123. [Google Scholar] [CrossRef]
- Xu, H.; Wang, P.; Yang, Y.; Ma, H.; Luo, Z.; Han, Q.; Wen, B. Effects of supporting stiffness of deep groove ball bearings with raceway misalignment on vibration behaviors of a gear-rotor system. Mech. Mach. Theory 2022, 177, 105041. [Google Scholar] [CrossRef]
- Du, Y.; Ming, Q.; Jiang, X. Stiffness calculation of high-speed precision angular contact ball bearing. Bearing 2001, 20, 5–8. (In Chinese) [Google Scholar]
- Wang, C.; Tian, J.; Zhang, F.; Ai, Y.-T.; Wang, Z. Dynamic modeling and simulation analysis of inter-shaft bearing fault of a dual-rotor system. Mech. Syst. Signal Process. 2023, 193, 110260. [Google Scholar] [CrossRef]
- Hernot, X.; Sartor, M.; Guillot, J. Calculation of the stiffness matrix of angular contact ball bearings by using the analytical approach. J. Mech. Des. 2000, 122, 83–90. [Google Scholar] [CrossRef]
- Sheng, X.; Li, B.; Wu, Z.; Li, H. Calcuation of ball bearing speed-vavring stiffness. Mech. Mach. Theory 2014, 81, 166–180. [Google Scholar] [CrossRef]
- Cao, H.; Li, Y.; He, Z.; Zhu, Y. Time Varying Bearing Stiffness and Vibration Response Analysis of High Speed Rolling Bearing-rotor Systems. J. Mech. Eng. 2014, 50, 15–81. (In Chinese) [Google Scholar] [CrossRef]
- Geng, K.; Lin, S. Effect of angular misalignment on the stiffness of the double-row self-aligning ball bearing. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2019, 234, 4–962. [Google Scholar] [CrossRef]
- Zhang, J.; Fang, B.; Zhu, Y.; Hong, J. A comparative study and stiffness analysis of angular contact ball bearings under different preload mechanisms. Mech. Mach. Theory 2017, 115, 1–17. [Google Scholar] [CrossRef]
- Xu, T.; Yang, L.; Wu, W.; Han, Y.; Xu, E.; Wang, K. The stiffness characteristics analysis of the duplex angular contact ball bearings based on a comprehensive multi-degree-of-freedom mathematical model. Appl. Math. Model. 2022, 106, 601–626. [Google Scholar] [CrossRef]
- Fang, B.; Zhang, J.; Yan, K.; Hong, J.; Wang, M.Y. A comprehensive study on the speed-varying stiffness of ball bearing under different load conditions. Mech. Mach. Theory 2019, 136, 1–13. [Google Scholar] [CrossRef]
- Tsuha, N.A.H.; Cavalca, K.L. Stiffness and damping of elastohydrodynamic line contact applied to cylindrical roller bearing dynamic model. J. Sound Vib. 2020, 481, 115444. [Google Scholar] [CrossRef]
- Xu, L.; Yang, Y. Dynamic modeling and contact analysis of a cycloid-pin gear mechanism with a turning arm cylindrical roller bearing. Mech. Mach. Theory 2016, 104, 327–349. [Google Scholar] [CrossRef]
- Xu, H.; He, D.; Ma, H.; Yu, K.; Zhao, X.; Yang, Y. A method for calculating radial time-varying stiffness of flexible cylindrical roller bearings with localized defects. Eng. Fail. Anal. 2021, 128, 105590. [Google Scholar] [CrossRef]
- Meng, J.; Deng, S.; Tang, L.; Du, H.; Liang, B. Nonlinerity rigidity analysis of high-speed cyclinderical roller bearing. Mach. Des. Manuf. 2005, 131–133. (In Chinese) [Google Scholar]
- Huang, H.; Zhang, P.; Wen, J. Research on stiffness of high-speed cylindrical roller bearings. China Mech. Eng. 2001, 12, 1245–1247. (In Chinese) [Google Scholar]
- Cheng, D.; Xu, S.-H.; Kim, S.; Zhang, S. Analysis of non-uniform load distribution and stiffness for a preloaded roller linear motion guide. Mech. Mach. Theory 2021, 164, 104407. [Google Scholar] [CrossRef]
- Lim, T.C.; Singh, R. Vibration transmission through rolling element bearings, Part I: Bearing stiffness Equationtion. J. Sound Vib. 1990, 139, 2–199. [Google Scholar] [CrossRef]
- Zantopulos, H. The radial and axial stiffness of tapered roller bearings under combined load. J. Tribol. 1996, 118, 257–263. [Google Scholar] [CrossRef]
- Tong, V.C.; Hong, S.W. The effect of angular misalignment on the stiffness characteristics of tapered roller bearings. Proc. Instituion Mech. Eng. Part C J. Mech. Eng. Sci. 2016, 231, 4–727. [Google Scholar] [CrossRef]
- Tong, V.C.; Hong, S.W. Effects of roller profile on the stiffness of tapered roller bearings. J. Autom. Control Eng. 2015, 3, 2–156. [Google Scholar] [CrossRef]
- Zhang, Z.; Huang, W.; Liao, Y.; Song, Z.; Shi, J.; Jiang, X.; Shen, C.; Zhu, Z. Bearing fault diagnosis via generalized logarithm sparse regularization. Mech. Syst. Signal Process. 2022, 167, 108576. [Google Scholar] [CrossRef]
- Huang, W.; Li, N.; Selesnick, I.; Shi, J.; Wang, J.; Mao, L.; Jiang, X.; Zhu, Z. Nonconvex Group Sparsity Signal Decomposition via Convex Optimization for Bearing Fault Diagnosis. IEEE Trans. Instrum. Meas. 2020, 69, 7–4872. [Google Scholar] [CrossRef]
- Luo, J.; Luo, T. Analysis Calculation and Application of Rolling Bearing; Mechanical Industry Press: Beijing, China, 2009. (In Chinese) [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Unit | Numerical Value |
|---|---|---|
| Small end diameter of roller Dw1 | mm | 30.27 |
| Large end diameter of roller Dw2 | mm | 36.74 |
| Large end spherical radius of roller Rs | mm | 109.05 |
| Effective roller length Le | mm | 57.02 |
| Bearing inner ring diameter d | mm | 120.65 |
| Bearing outer ring diameter D | mm | 273.05 |
| Diameter of inner raceways Di | mm | 167.35 |
| Diameter of outer raceways Do | mm | 230.51 |
| Roller-Outer raceway contact angle αo | deg | 22.54 |
| Roller-Inner raceway contact angle αi | deg | 16.24 |
| Contact angle of roller big end-flange αf | deg | 70.20 |
| The distance between two roller centers dc | mm | 75.96 |
| Number of rollers Z | ind | 14 |
| Roller quality ms | kg | 0.126 |
| Pitch diameter dm | mm | 198.93 |
| Parameter | Unit | Numerical Value |
|---|---|---|
| Density ρ | kg/m3 | 7810 |
| Young’s modulus E | Mpa | 2.1 × 105 |
| Coefficient of linear expansion αr | /°C | 12.03 × 106 |
| Poisson ratio μ | - | 0.3 |
| Work Condition | Maximum Contact Load of Outer Raceway(N) | Maximum Contact Load of Inner Raceway(N) | Maximum Contact Load of Flange(n) | Maximal Relation Error | ||||
|---|---|---|---|---|---|---|---|---|
| Model in This Paper | Adams Simulation | Model in This Paper | Adams Simulation | Model in This Paper | Adams Simulation | |||
| ωc = 1200 r/min | Fr = 1500 N, Fa = 5000 N, F0 = 100 N, M = 20 N*m | 1304.8 | 1207.8 | 1119.3 | 1039.9 | 198.9 | 185.0 | 7.4% |
| Fr = 5000 N, Fa = 1500 N, F0 = 100 N, M = 20 N*m | 1084.6 | 1002.2 | 898.9 | 836.0 | 174.7 | 162.8 | 7.6% | |
| Fr = 8000 N, Fa = 3000 N, F0 = 100 N, M = 20 N*m | 1731.3 | 1624.0 | 1546.1 | 1462.6 | 245.8 | 237.9 | 6.2% | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, F.; Lv, H.; Han, Q.; Li, M. The Effects Analysis of Contact Stiffness of Double-Row Tapered Roller Bearing under Composite Loads. Sensors 2023, 23, 4967. https://doi.org/10.3390/s23104967
Zhang F, Lv H, Han Q, Li M. The Effects Analysis of Contact Stiffness of Double-Row Tapered Roller Bearing under Composite Loads. Sensors. 2023; 23(10):4967. https://doi.org/10.3390/s23104967
Chicago/Turabian StyleZhang, Fanyu, Hangyuan Lv, Qingkai Han, and Mingqi Li. 2023. "The Effects Analysis of Contact Stiffness of Double-Row Tapered Roller Bearing under Composite Loads" Sensors 23, no. 10: 4967. https://doi.org/10.3390/s23104967
APA StyleZhang, F., Lv, H., Han, Q., & Li, M. (2023). The Effects Analysis of Contact Stiffness of Double-Row Tapered Roller Bearing under Composite Loads. Sensors, 23(10), 4967. https://doi.org/10.3390/s23104967