


Development of Path Generation and Algorithm for Autonomous Combine Harvester Using Dual GPS Antenna

Abstract
1. Introduction
2. Materials and Methods
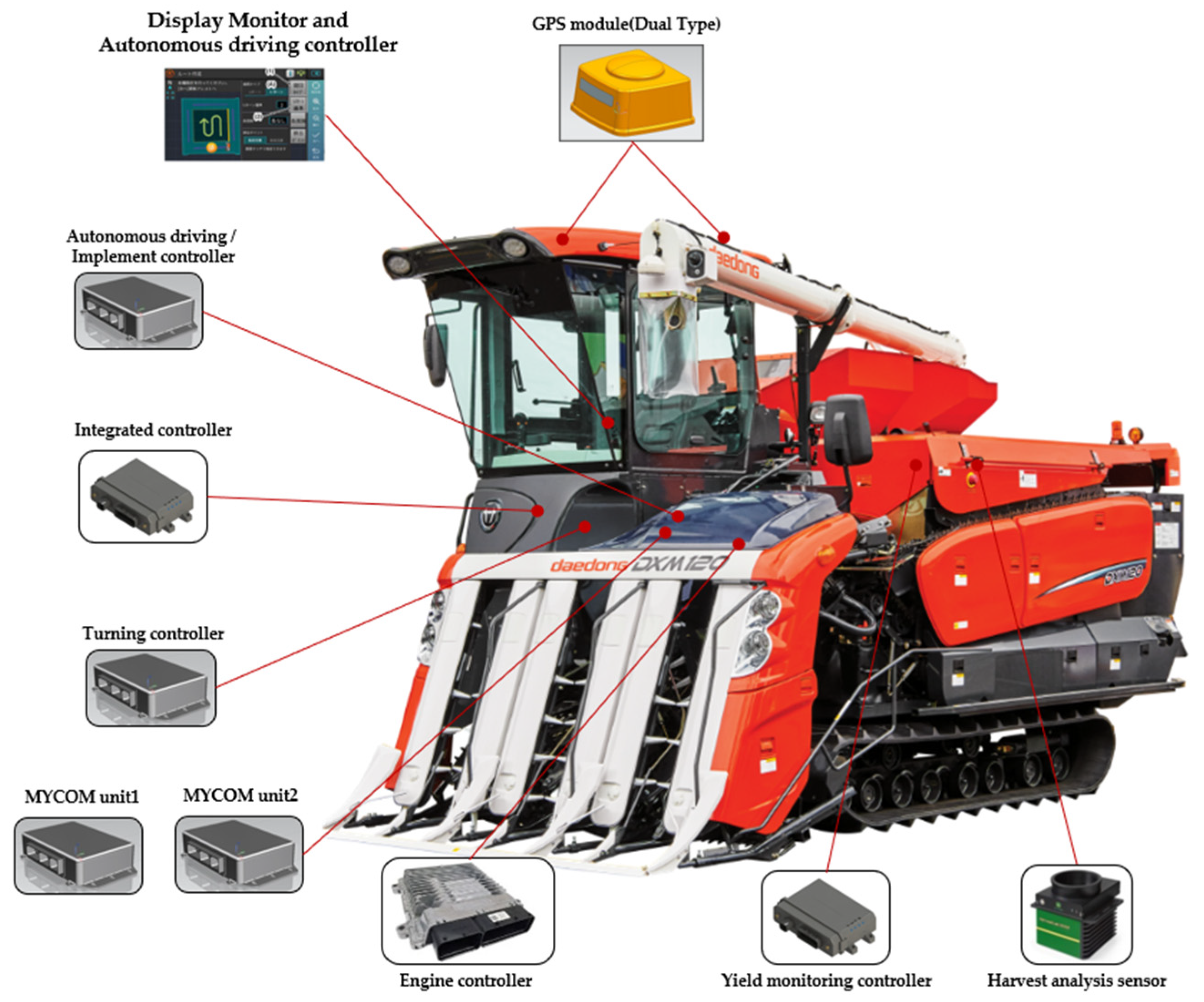
2.1. Combine Harvester Hardware System
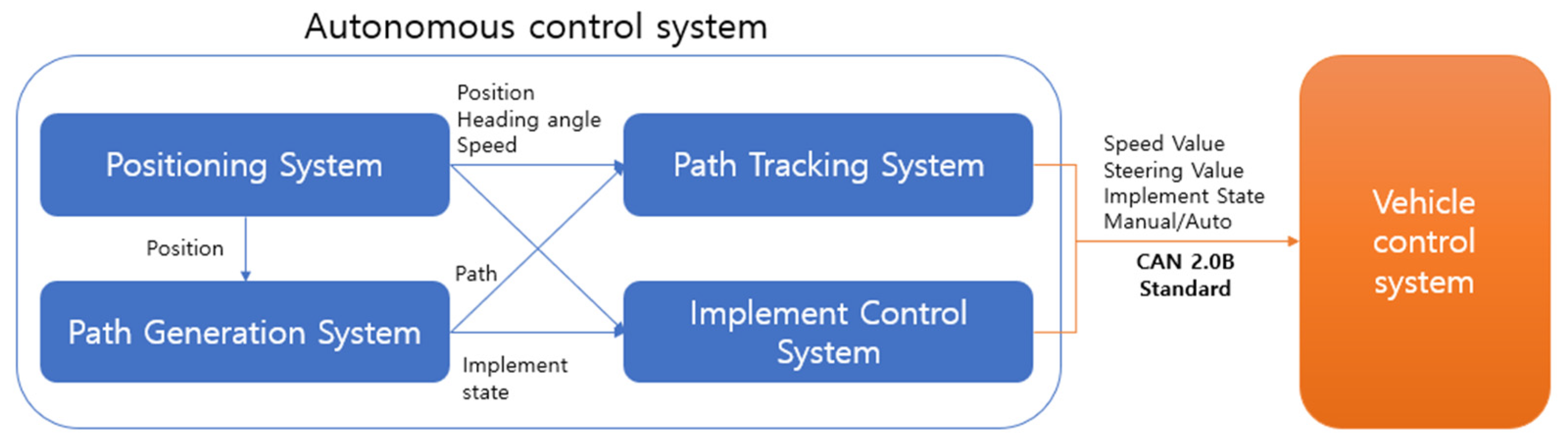
2.2. Combine Harvester Autonomous System
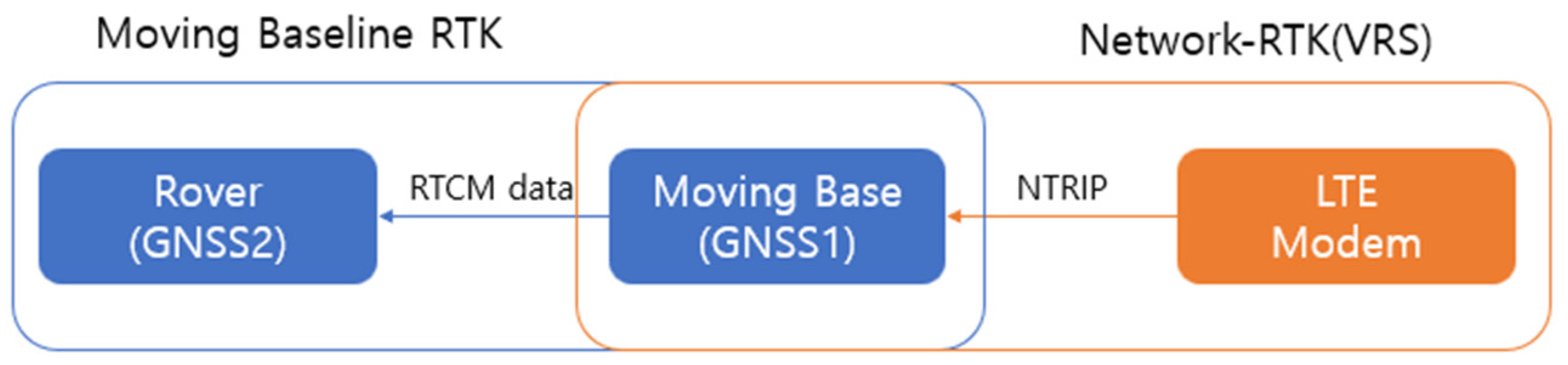
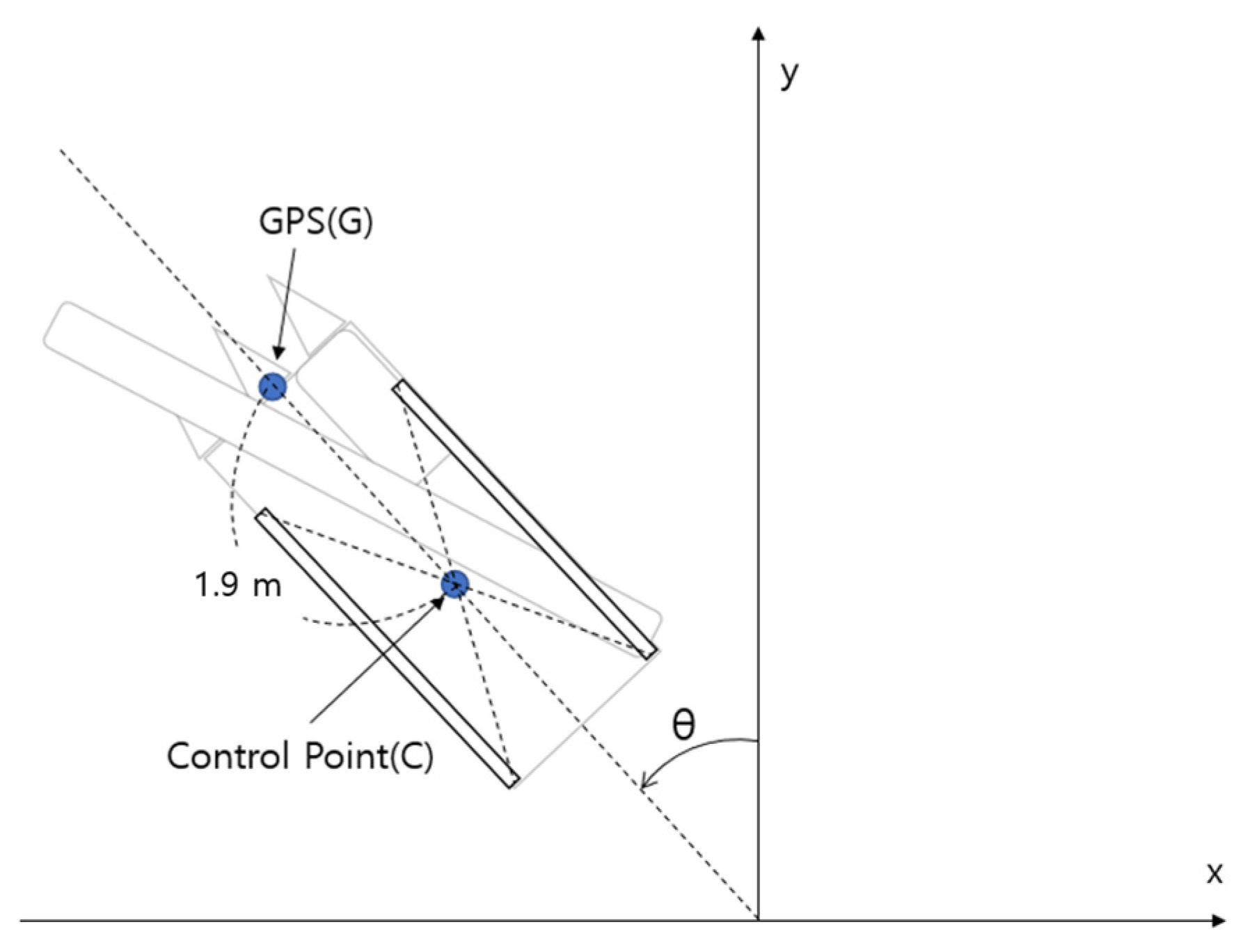
2.2.1. Positioning System
2.2.2. Path Generation System
2.2.3. Path Tracking System
2.2.4. Implement Control System
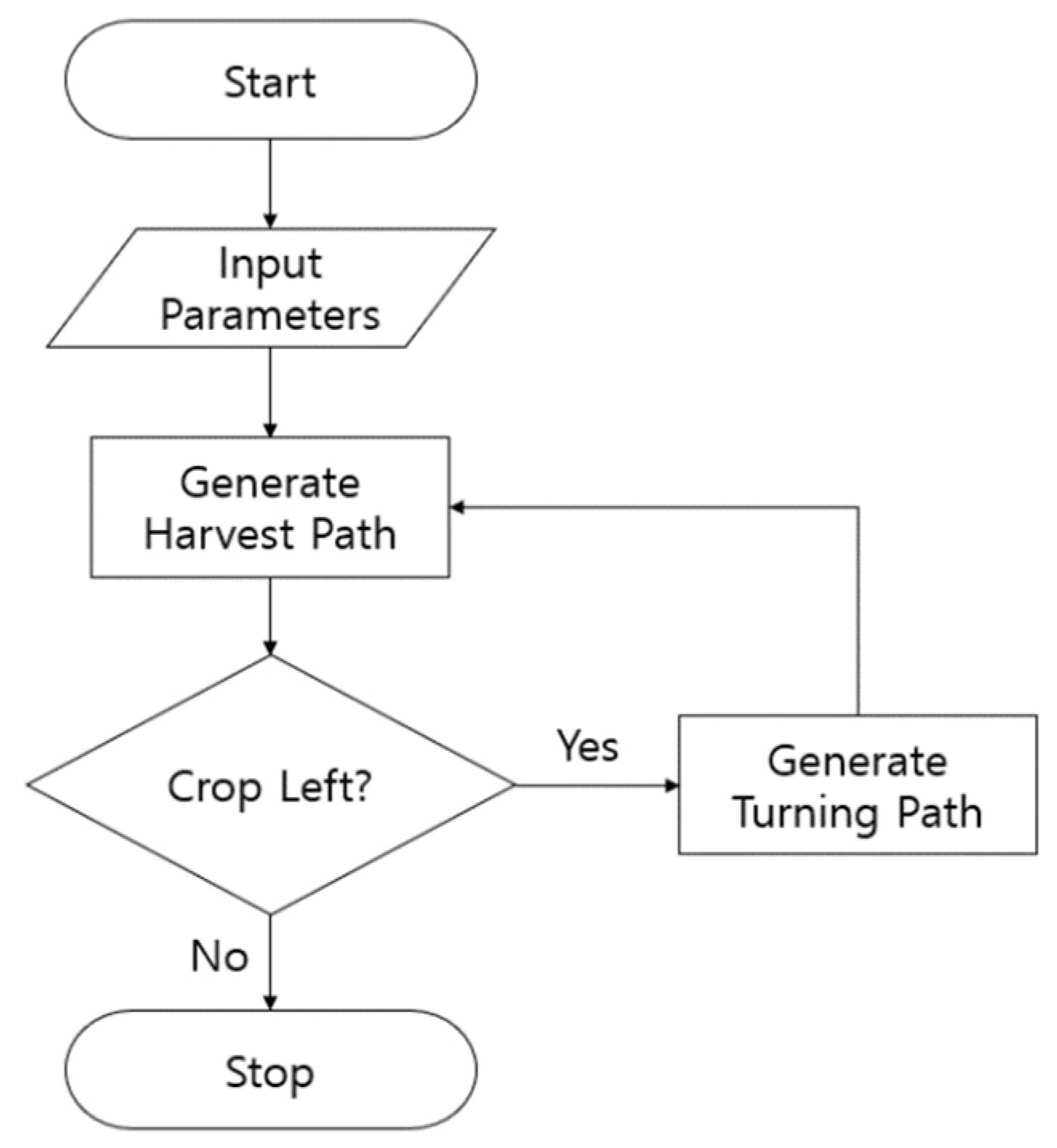
2.3. Combine Harvester Path Generation
2.3.1. Parameter Input
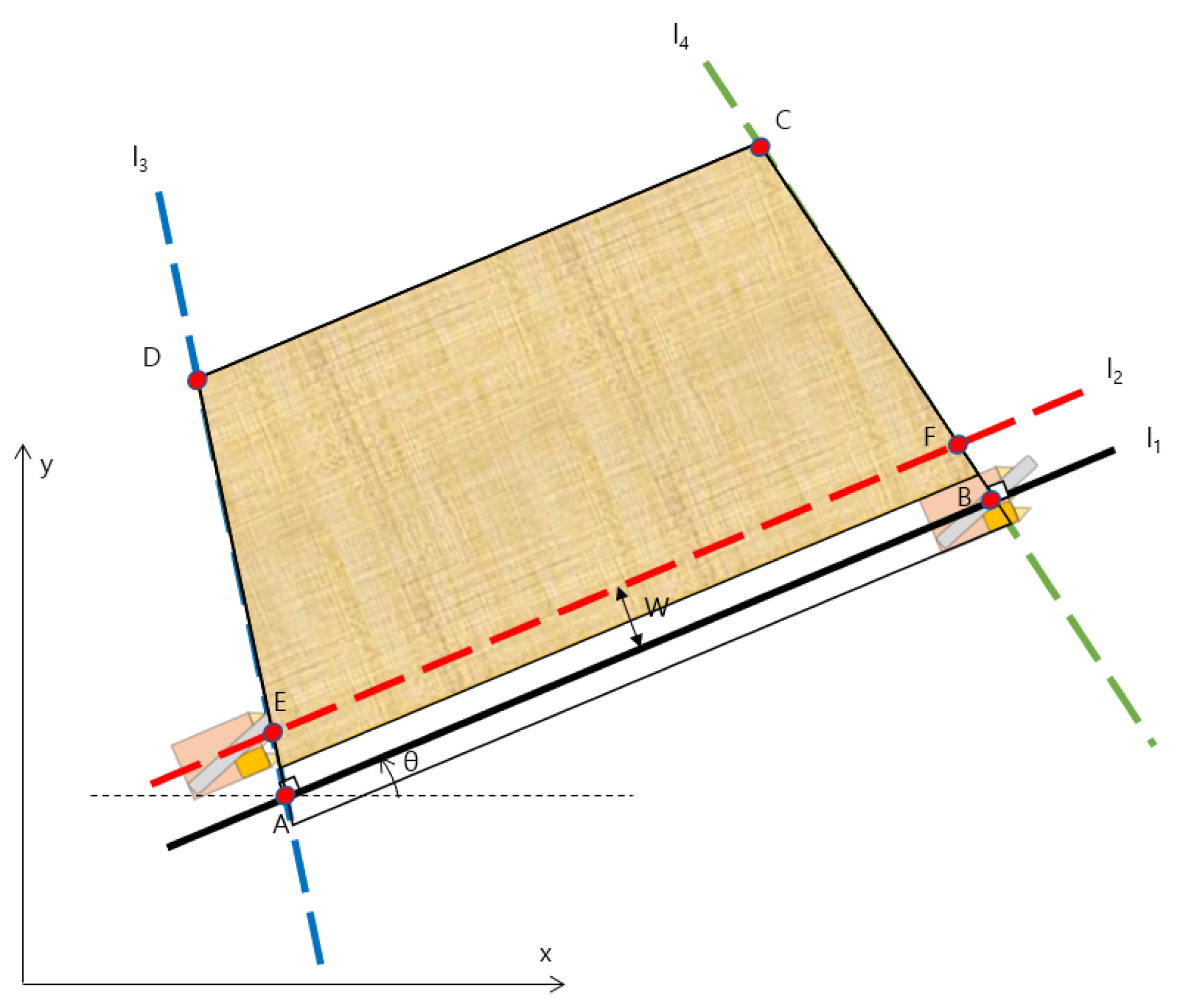
2.3.2. Harvesting Path Generation
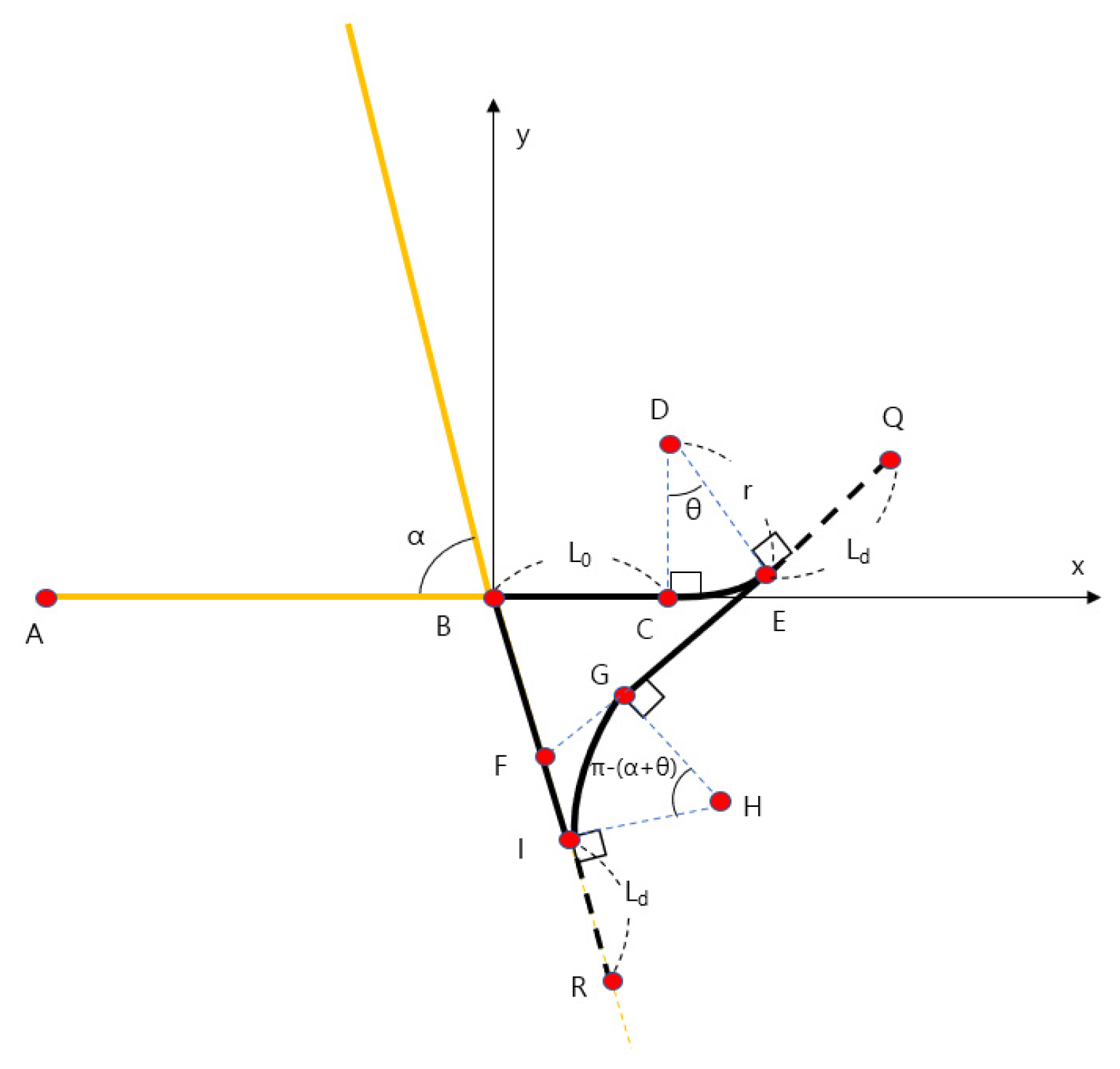
2.3.3. Turning Path Generation
2.4. Combine Harvester Control
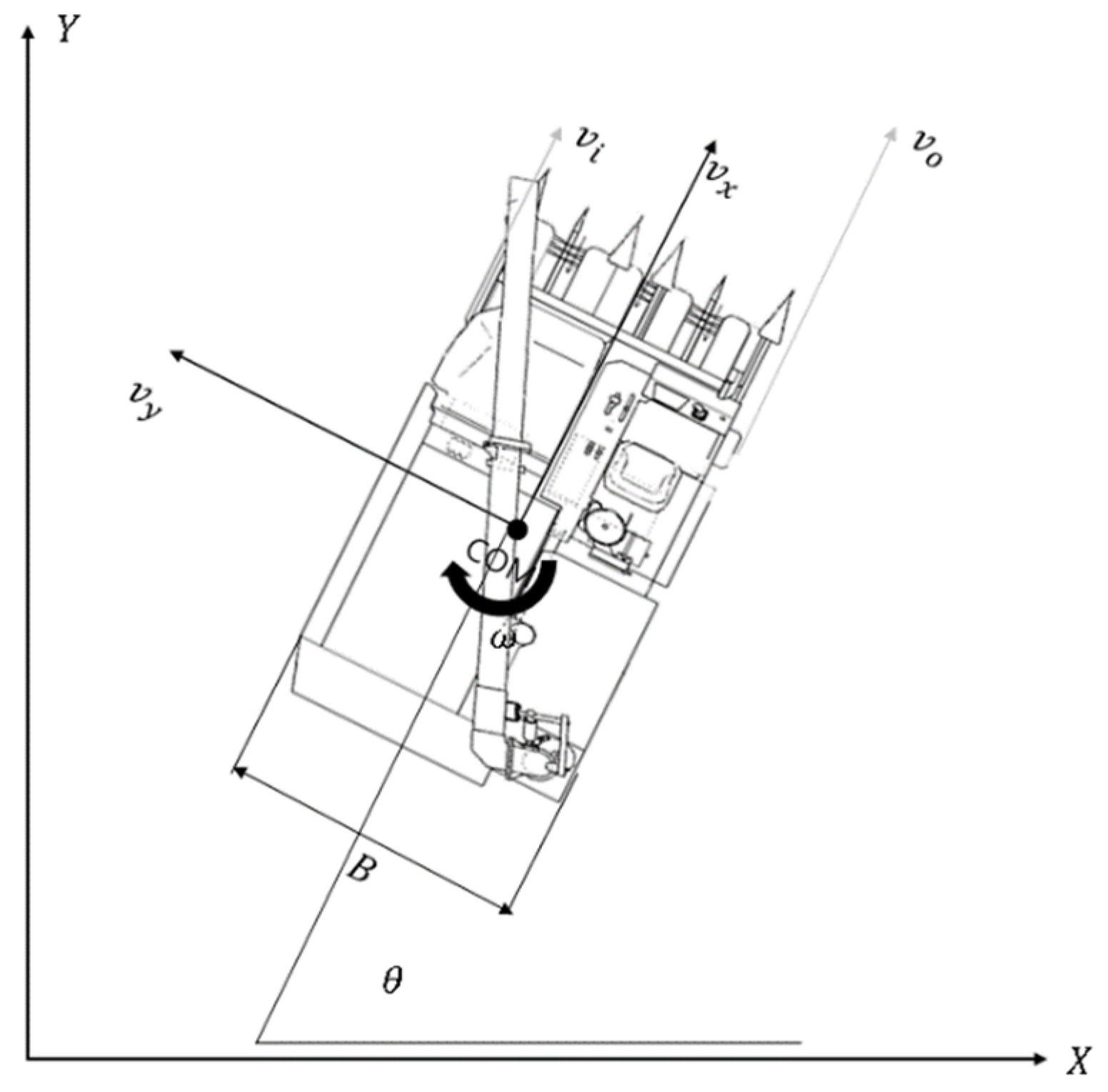
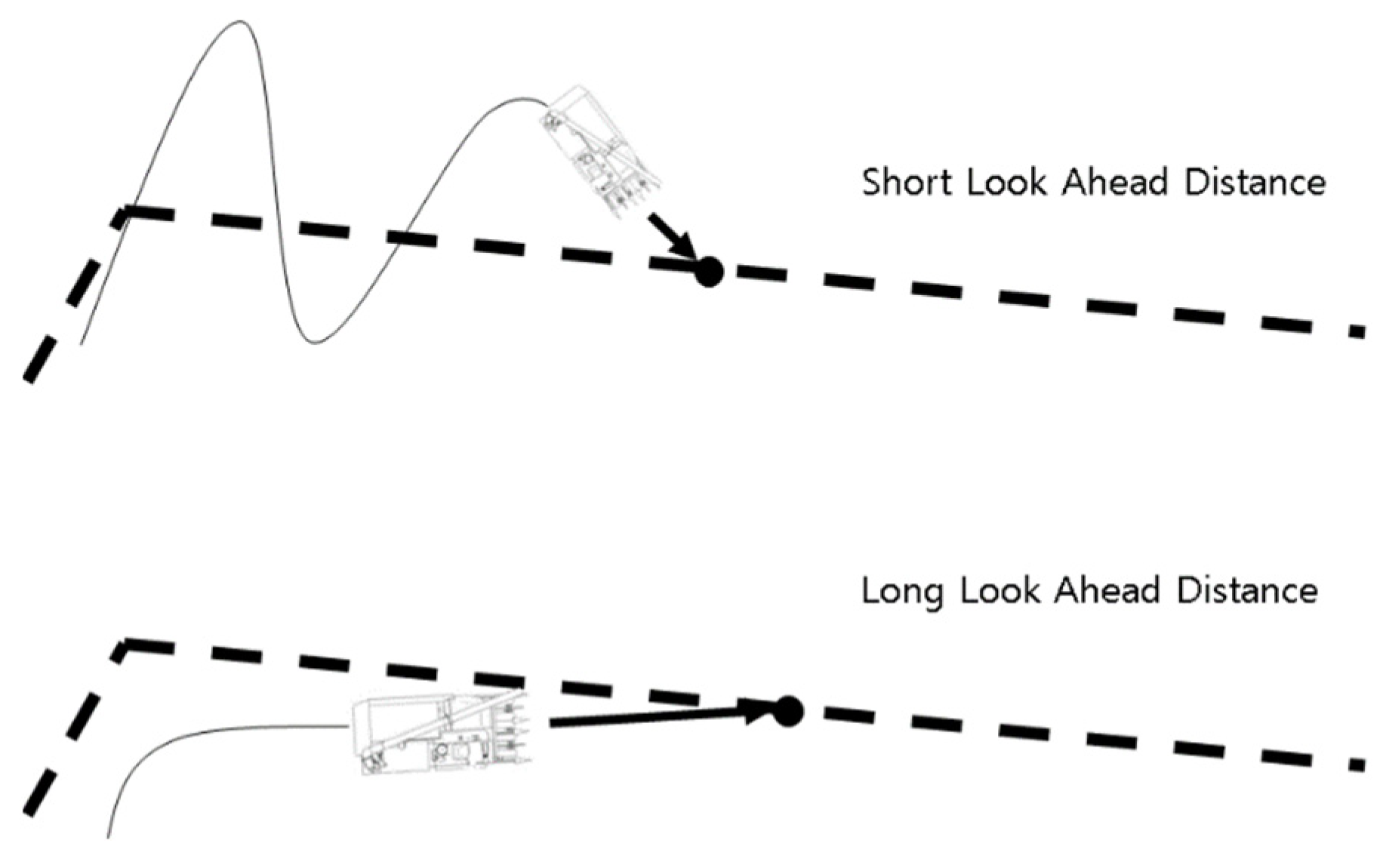
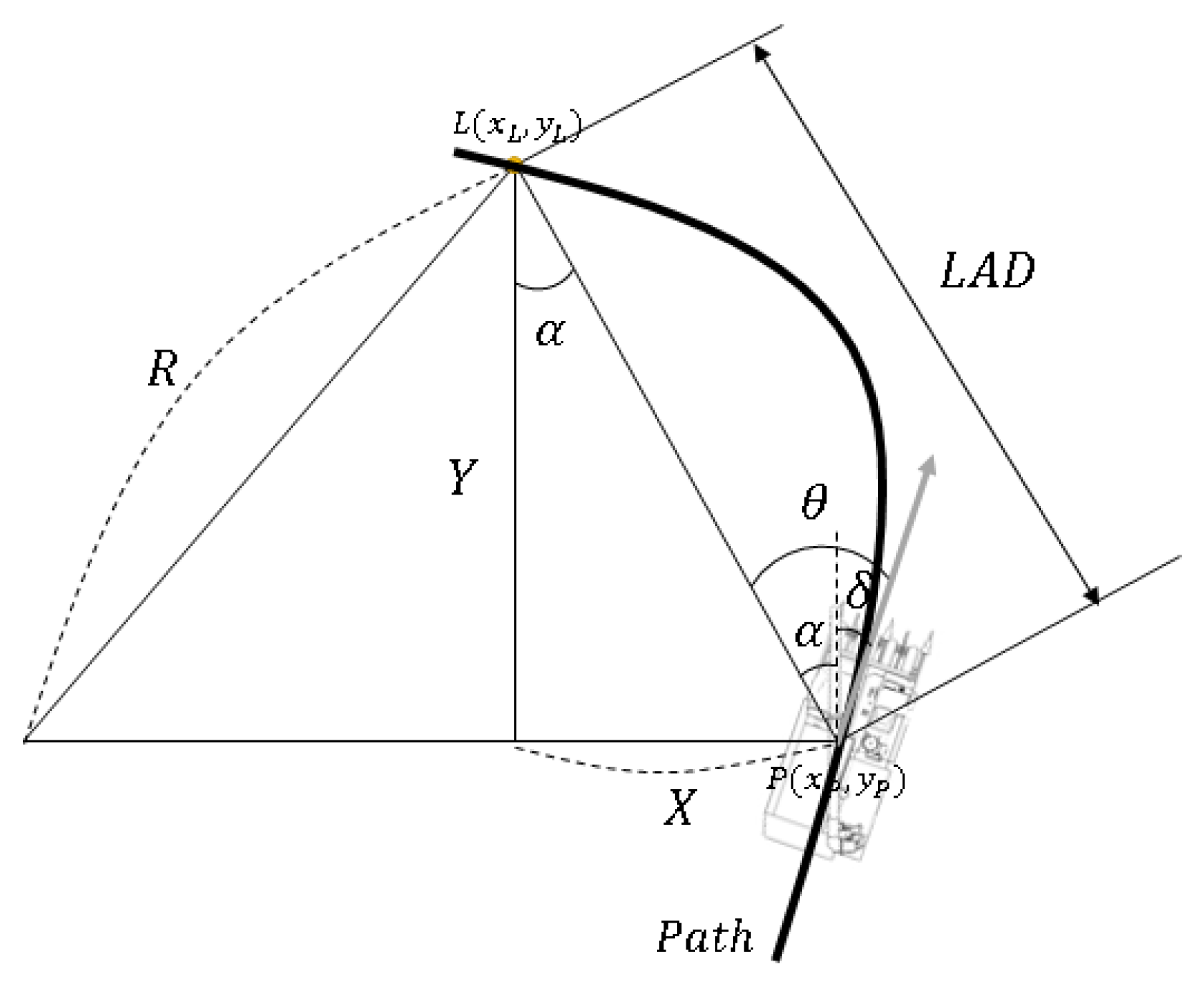
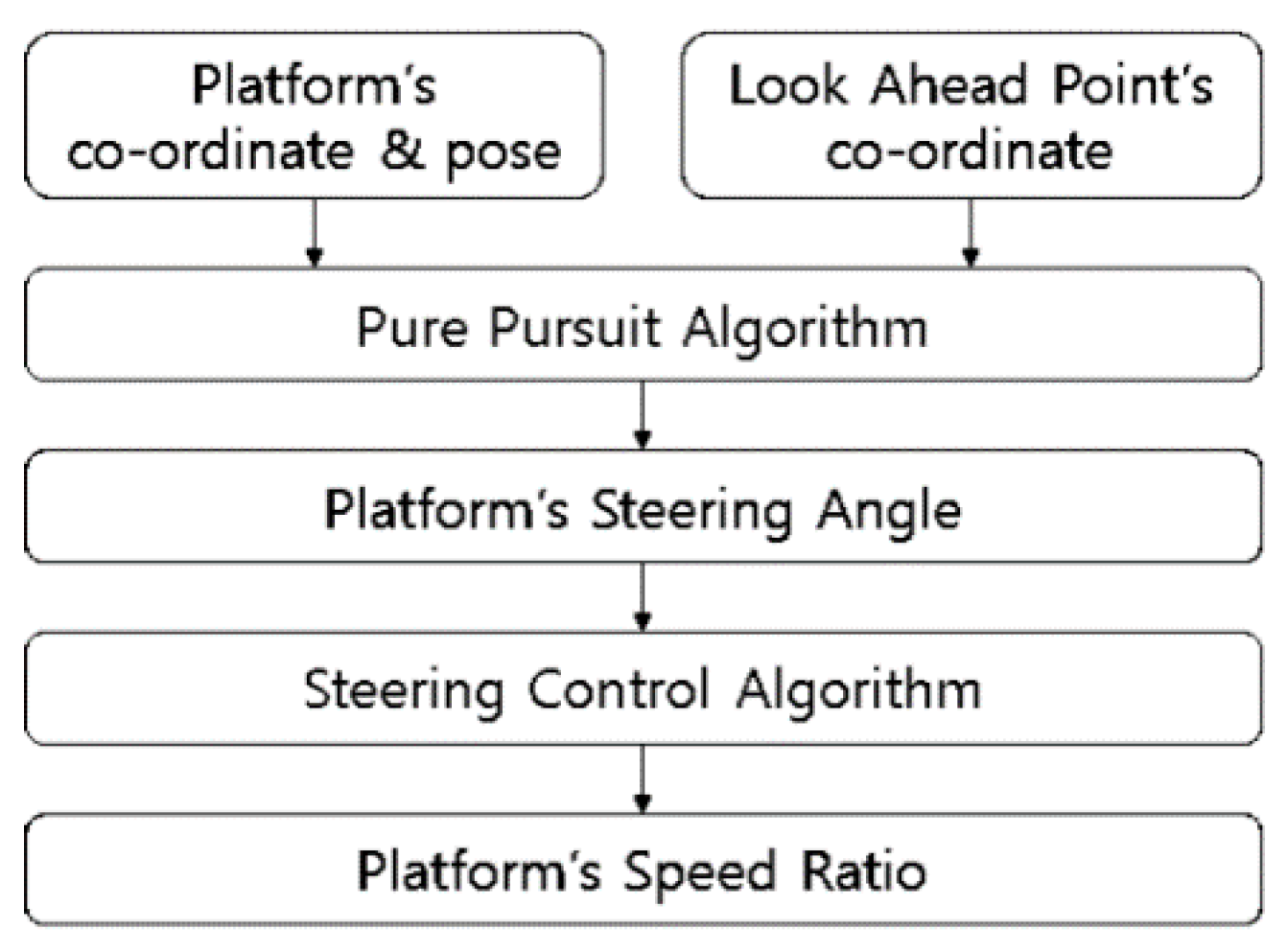
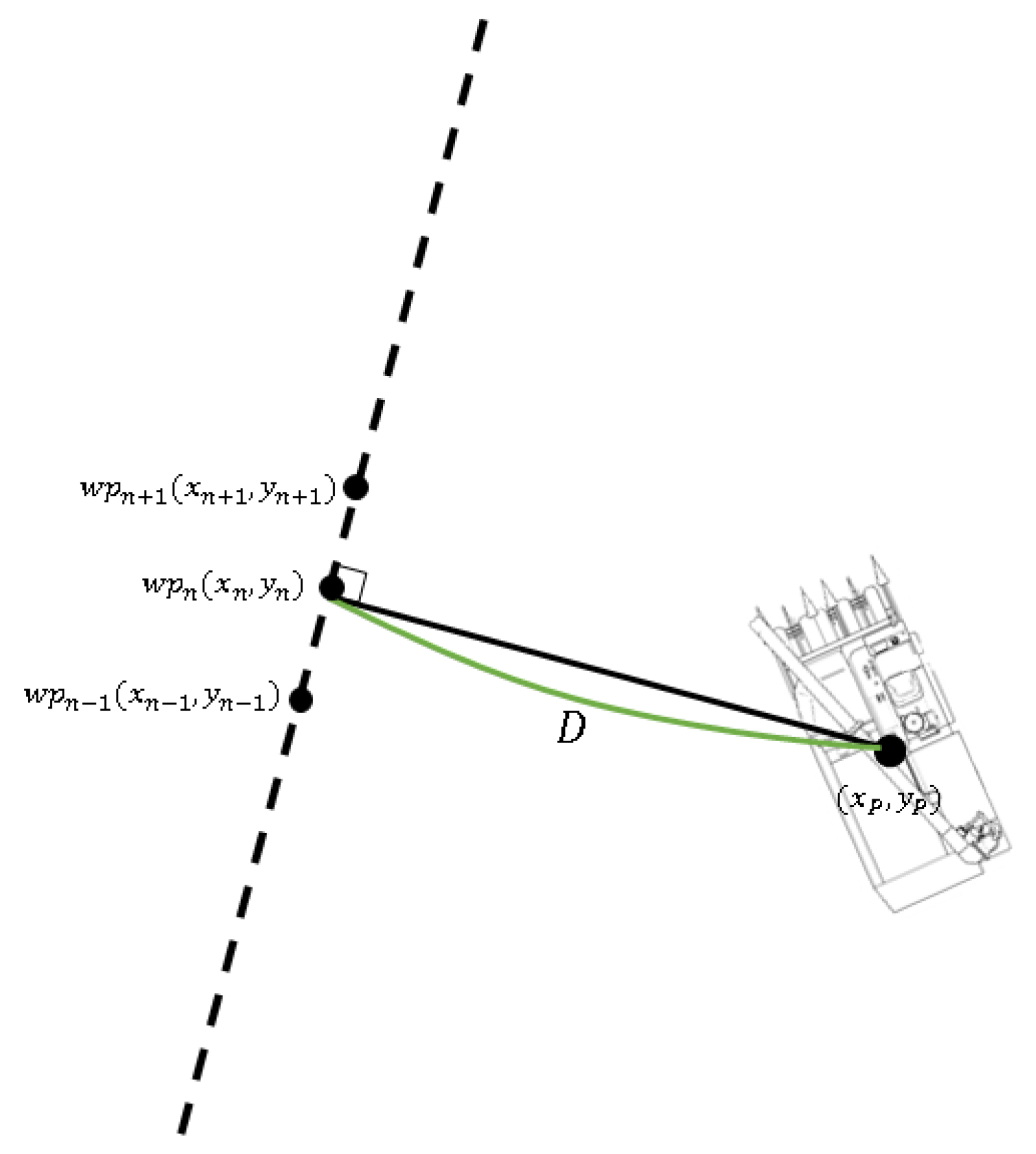
2.4.1. Lateral Control
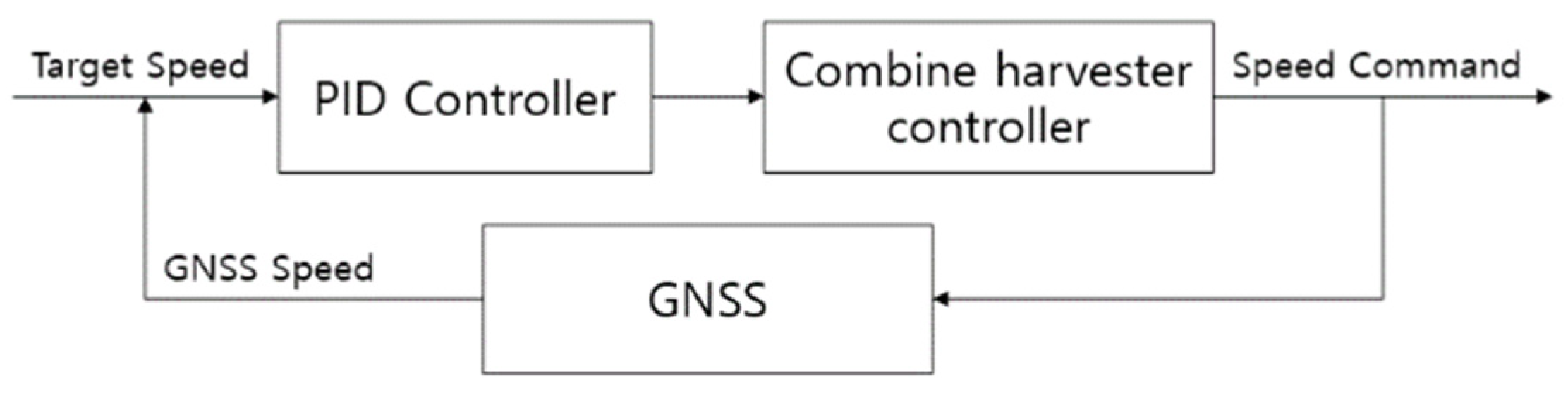
2.4.2. Longitudinal Control
3. Results
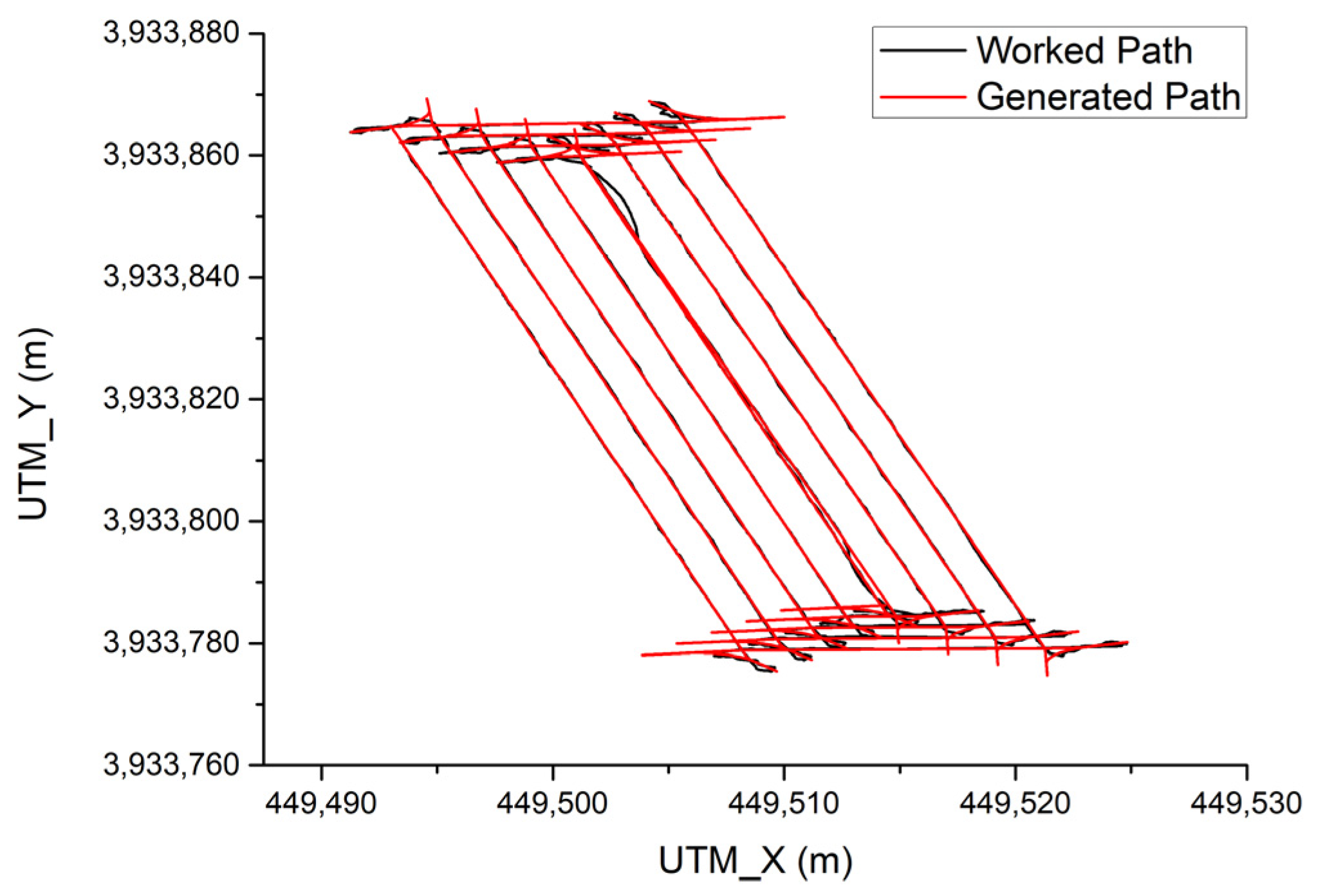
3.1. Path Tracking without Harvesting Rice
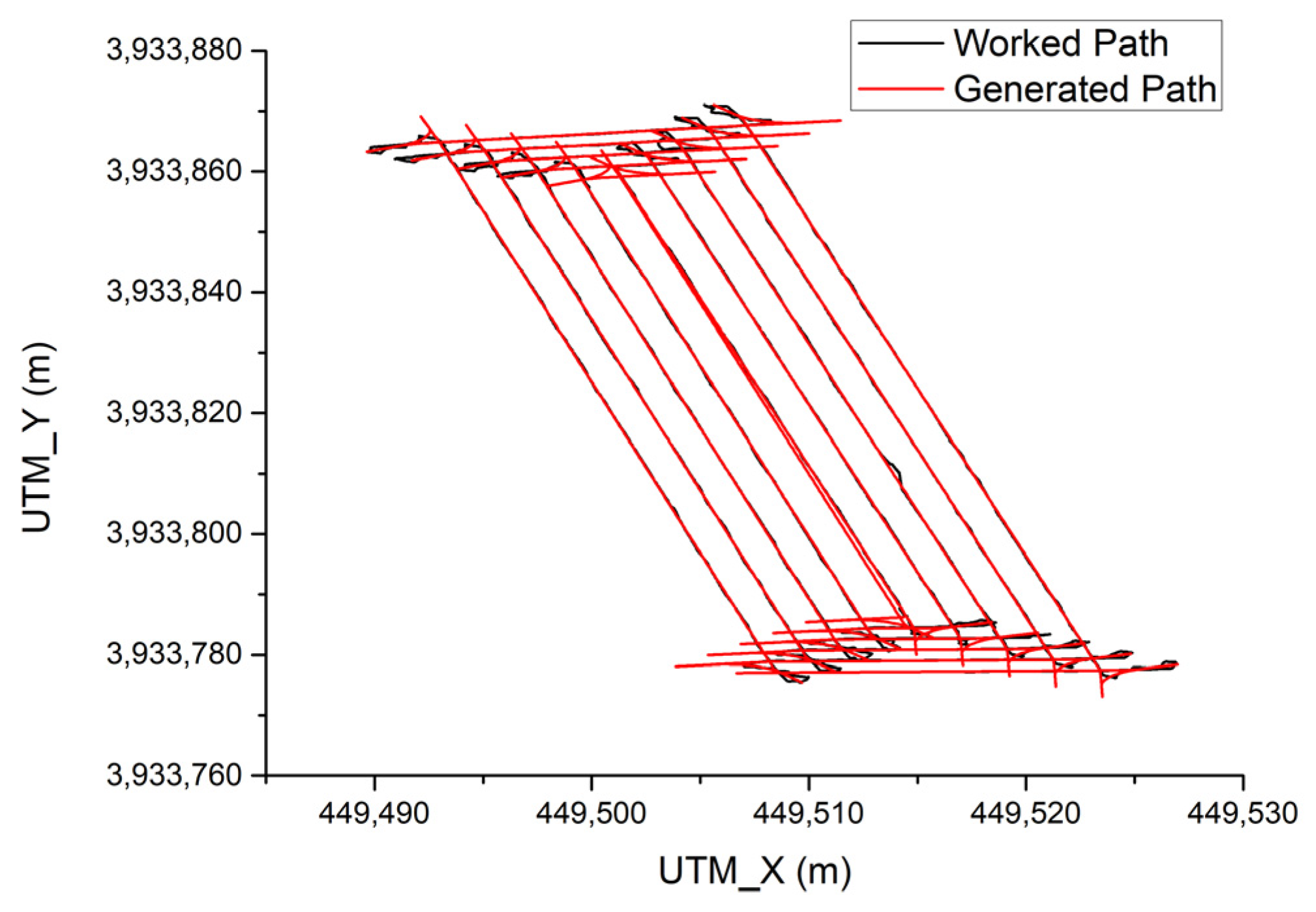
3.2. Path Tracking with Harvesting Rice
4. Discussion
4.1. Path Generation Algorithm
4.2. Path Tracking Algorithm
4.3. Autonomous Driving System
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Kang, M.S.; Jung, M.J. Food Security Risks and Prospects in Africa and the Middle East Following the Russia-Ukrainian War. KIEP World Econ. Focus 2022, 22–16, 1–20. [Google Scholar]
- Roshanianfard, A.; Noguchi, N.; Okamoto, H.; Ishii, K. A review of autonomous agricultural vehicles. J. Terramech. 2020, 91, 155–183. [Google Scholar] [CrossRef]
- Kim, Y.J.; Baek, S.M. Current status and Diagnosis of Major Technologies and Agricultural Equiment in Precision Agriculture. Korea Rural Econ. Inst. Basic Res. Rep. 2020, 1–118. [Google Scholar]
- Park, C.H.; Kim, J.M.; NahmGung, M.J. Automatic Guidance System for Combine Using Dgps and Gyro Sensor. In Proceedings of the Korean Society for Agricultural Machinery Conference; Korean Society for Agricultural Machinery: Seoul, Korea, 2000; pp. 333–343. [Google Scholar]
- Stoll, A.; Heinz, D.K. Guidance of a forage harvester with GPS. Precis. Agric. 2000, 2, 281–291. [Google Scholar] [CrossRef]
- Mark, F.; Doug, C.; Mohamed, A. RTK-based vehicle tracking and unmanned operation for agriculture. In Proceedings of the 12th International Technical Meeting of the Satellite Division of The Institute of Navigation, Nashville, TN, USA, 14–17 September 1999; pp. 2047–2054. [Google Scholar]
- Yoshisada, N.; Saito, H.; Tamaki, K.; Seki, M.; Kobayashi, K.; Taniwaki, K. An autonomous rice transplanter guided by global positioning system and inertial measurement unit. J. Field Robot. 2009, 26, 537–548. [Google Scholar]
- Ze, Z.; Noguchi, N.; Ishii, K.; Yang, L.; Zhang, C. Development of a robot combine harvester for wheat and paddy harvesting. IFAC Proc. 2013, 46, 45–48. [Google Scholar]
- Choi, J.M.; Yin, X.; Noguchi, N. Development of a laser scanner-based navigation system for a combine harvester. IFAC Proc. 2013, 46, 103–108. [Google Scholar] [CrossRef]
- Zhao, T.; Noguchi, N.; Yang, L.; Ishii, K.; Chen, J. Development of uncut crop edge detection system based on laser rangefinder for combine harvesters. Int. J. Agric. Biol. Eng. 2016, 9, 21–28. [Google Scholar]
- Rovira-Más, F.; Han, S.; Wei, J.; Reid, J.F. Autonomous guidance of a corn harvester using stereo vision. Agric. Eng. Int. CIGR J. 2007, 9, 1–13. [Google Scholar]
- Kim, W.S.; Lee, D.H.; Kim, T.; Kim, H.; Sim, T.; Kim, Y.J. Weakly supervised crop area segmentation for an autonomous combine harvester. Sensors 2021, 21, 4801. [Google Scholar] [CrossRef]
- Kim, H.J.; Kim, J.H. Autonomous Driving Agricultural Machine Technology Research. J. KSME 2018, 58, 42–46. [Google Scholar]
- Choi, H.H.; Lee, K.H.; Kim, J.H. Research of Coverage Path Planning Algorithm including Discharging Path for Autonomous Combine Harvester. Korean Soc. Agric. Mach. Conf. 2021, 26, 236. [Google Scholar]
- Jeon, C.W.; Kim, H.J.; Han, X.; Kim, J.H. Preliminary study on automated path generation and tracking simulation for an unmanned combine harvester. Korean Soc. Agric. Mach. Conf. 2017, 22, 20. [Google Scholar]
- Jeon, C.W.; Kim, H.J.; Kim, J.H.; Yi, S.Y. Application of a combine harvester driving simulator for autonomous path tracking and steering control. Korean Soc. Agric. Mach. Conf. 2017, 22, 69. [Google Scholar]
- Kurita, H.; Lida, M.; Cho, W.; Suguri, M. Rice autonomous harvesting: Operation framework. J. Field Robot. 2017, 34, 1084–1099. [Google Scholar] [CrossRef]
- Benson, E.R.; Reid, J.F.; Zhang, Q. Machine vision–based guidance system for an agricultural small–grain harvester. Trans. ASAE 2003, 46, 1255–1264. [Google Scholar] [CrossRef]
- Iida, M.; Yamada, Y. Rice harvest using driverless combine harvester equipped with GPS and Gyro. J. Jpn. Soc. Agric. Mach. 2006, 68, 138–143. [Google Scholar]
- Uchida, R.; Iida, M.; Zhu, H.; Kurita, H.; Suguri, M.; Masuda, R. Path following control for head-feeding combine robot. Trans. Soc. Instrum. Control Eng. 2013, 49, 119–124. [Google Scholar] [CrossRef]
- Saito, M.; Tamaki, K.; Nishiwaki, K.; Nagasaka, Y.; Motobayashi, K. Development of a Robot Combine Harvester for Beans using CAN Bus Network. IFAC Proc. Vol. 2013, 46, 148–153. [Google Scholar] [CrossRef]
- Chen, H.; Chen, J.; Guan, Z.; Li, Y.; Cheng, K.; Cui, Z. Stereovision-Based Ego-Motion Estimation for Combine Harvesters. Sensors 2022, 22, 6394. [Google Scholar] [CrossRef]
- Li, Y.; Iida, M.; Suyama, T.; Suguri, M.; Masuda, R. Implementation of deep-learning algorithm for obstacle detection and collision avoidance for robotic harvester. Comput. Electron. Agric. 2020, 174, 105499. [Google Scholar] [CrossRef]
- Jiang, W.; Yang, Z.; Wang, P.; Cao, Q. Navigation Path Points Extraction Method Based on Color Space and Depth Information for Combine Harvester. In Proceedings of the 2020 5th International Conference on Advanced Robotics and Mechatronics (ICARM), Shenzhen, China, 18–21 December 2020; pp. 622–627. [Google Scholar]
- Blanquart, J.E.; Sirignano, E.; Lenaerts, B.; Saeys, W. Online crop height and density estimation in grain fields using LiDAR. Biosyst. Eng. 2020, 198, 1–14. [Google Scholar] [CrossRef]
- Redenius, J.; Belau, S.; Irmer, D.; Ruckelshausen, A.; Middelberg, R.; Spiekermann, S.; Bußmann, C.; Sellschopp, T.; Hertzberg, J. ‘Virtual Harvesting’as a Key Element in the Development of a novel LiDAR based Combine Harvester Steering System. VDI Verl. GmbH 2019, 2361, 173–178. [Google Scholar]
- Kim, Y.S. Analysis on the Position Accuracy through the Improvement of the VRS-GPS Controller System. J. Korean Soc. Hazard Mitig. 2018, 18, 353–362. [Google Scholar] [CrossRef]
- Lee, E.Y.; Yoon, H.J.; Park, B.W.; Kim, E.H. Relative Precise Positioning based on Moving Baseline and the Effect of Uncommon Satellite Combination. In Proceedings of the 21st International Conference on Control, Automation and Systems 2021, Jeju, Republic of Korea, 12–15 October 2021; pp. 162–166. [Google Scholar]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Horizontal pos. accuracy | 0.01 m + 1 ppm CEP | |
| Nav. update rate | 5 Hz | |
| Heading accuracy | 0.4 deg | |
| Velocity accuracy | 0.05 m/s | |
| Accuracy of time pulse signal | RMS | 30 ns |
| 99% | 60 ns | |
| Index | Latitude | Longitude | Velocity | Work Path | Implement |
|---|---|---|---|---|---|
| 0 | 451,479.291 | 3,943,390.395 | 5 | 1 | 1 |
| 1 | 451,479.463 | 3,943,390.497 | 5 | 1 | 1 |
| 2 | 451,479.634 | 3,943,390.599 | 5 | 1 | 1 |
| 3 | 451,479.806 | 3,943,390.700 | 5 | 1 | 1 |
| Field Parameter | Combine Parameters | Path Parameters |
|---|---|---|
| Four Field Vertex Points | Implements Width | Interval between Waypoints |
| Harvest Operation Speed | Look Ahead Distance | |
| Turning Operation Speed | Over-run Distance | |
| Distance between Implement and Control Point | Turning Radius |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, K.; Choi, H.; Kim, J. Development of Path Generation and Algorithm for Autonomous Combine Harvester Using Dual GPS Antenna. Sensors 2023, 23, 4944. https://doi.org/10.3390/s23104944
Lee K, Choi H, Kim J. Development of Path Generation and Algorithm for Autonomous Combine Harvester Using Dual GPS Antenna. Sensors. 2023; 23(10):4944. https://doi.org/10.3390/s23104944
Chicago/Turabian StyleLee, Kyuho, Hyohyuk Choi, and Junghun Kim. 2023. "Development of Path Generation and Algorithm for Autonomous Combine Harvester Using Dual GPS Antenna" Sensors 23, no. 10: 4944. https://doi.org/10.3390/s23104944
APA StyleLee, K., Choi, H., & Kim, J. (2023). Development of Path Generation and Algorithm for Autonomous Combine Harvester Using Dual GPS Antenna. Sensors, 23(10), 4944. https://doi.org/10.3390/s23104944