
The Validity of Hawkin Dynamics Wireless Dual Force Plates for Measuring Countermovement Jump and Drop Jump Variables †


 , and
, and 
Abstract
1. Introduction
2. Materials and Methods
2.1. Participants
2.2. Design
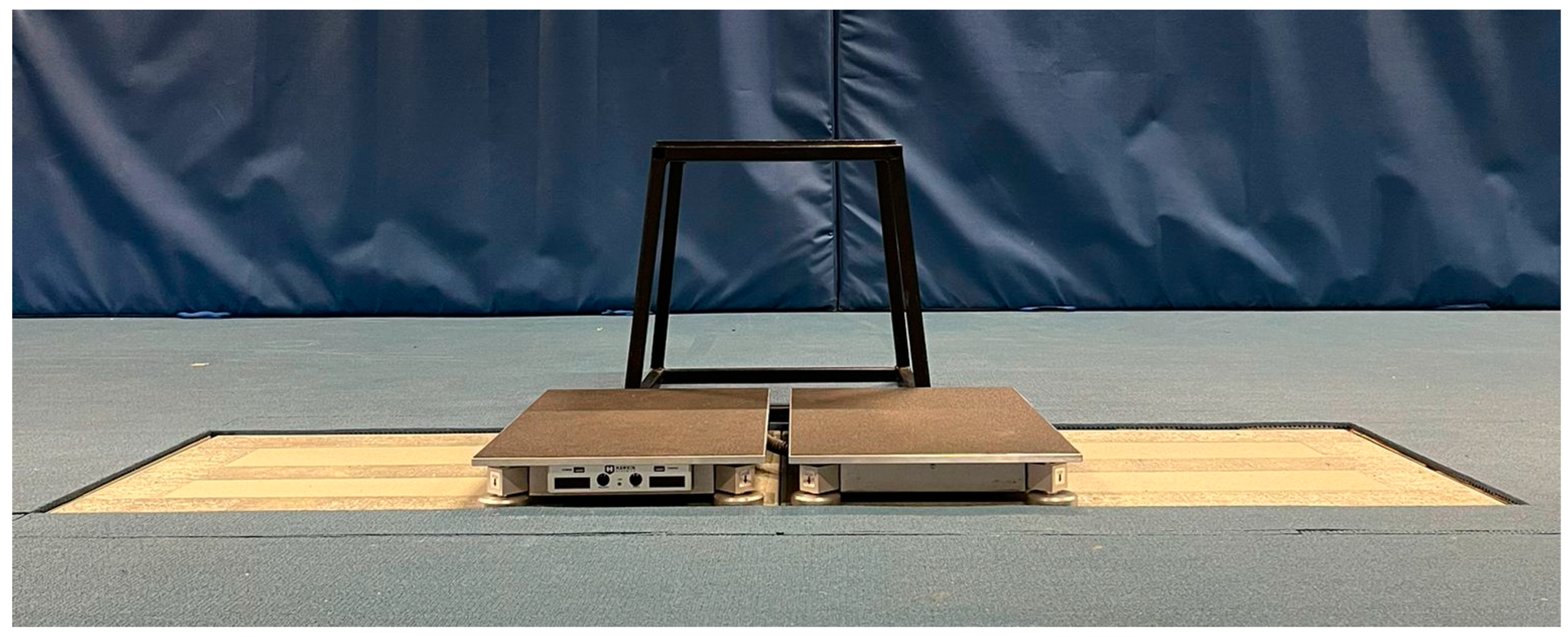
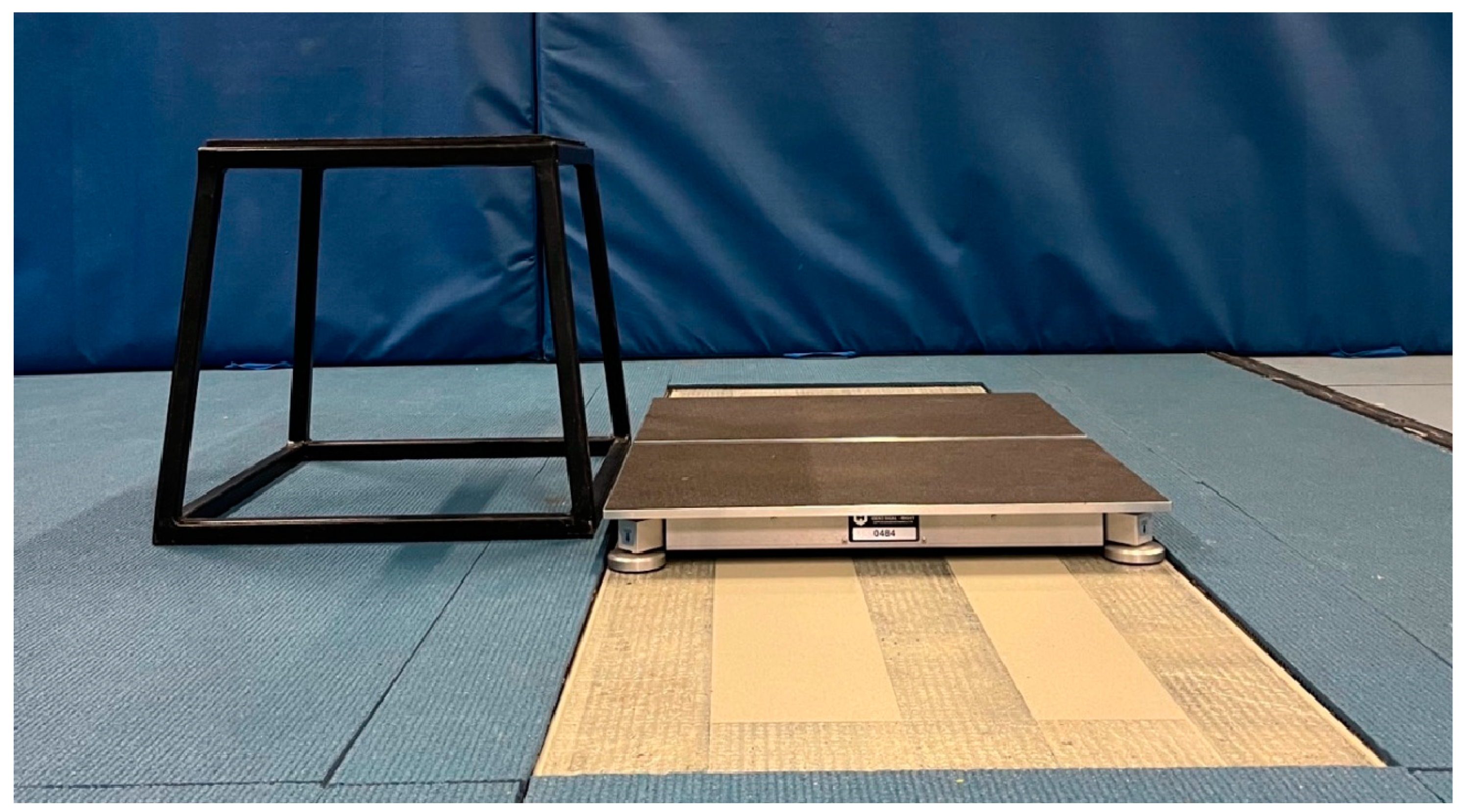
2.3. Force Plate Setup
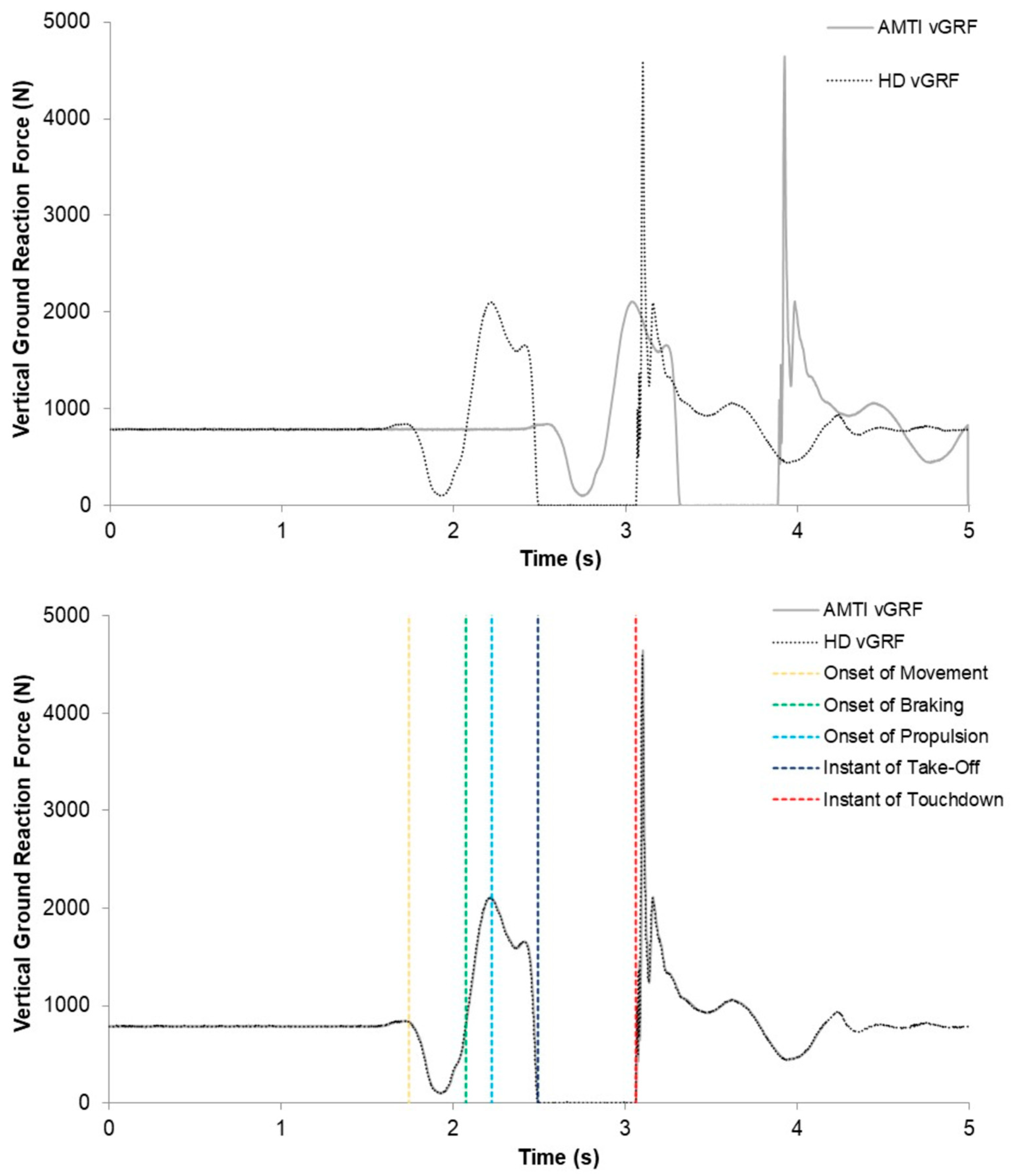
2.4. Countermovement Jump
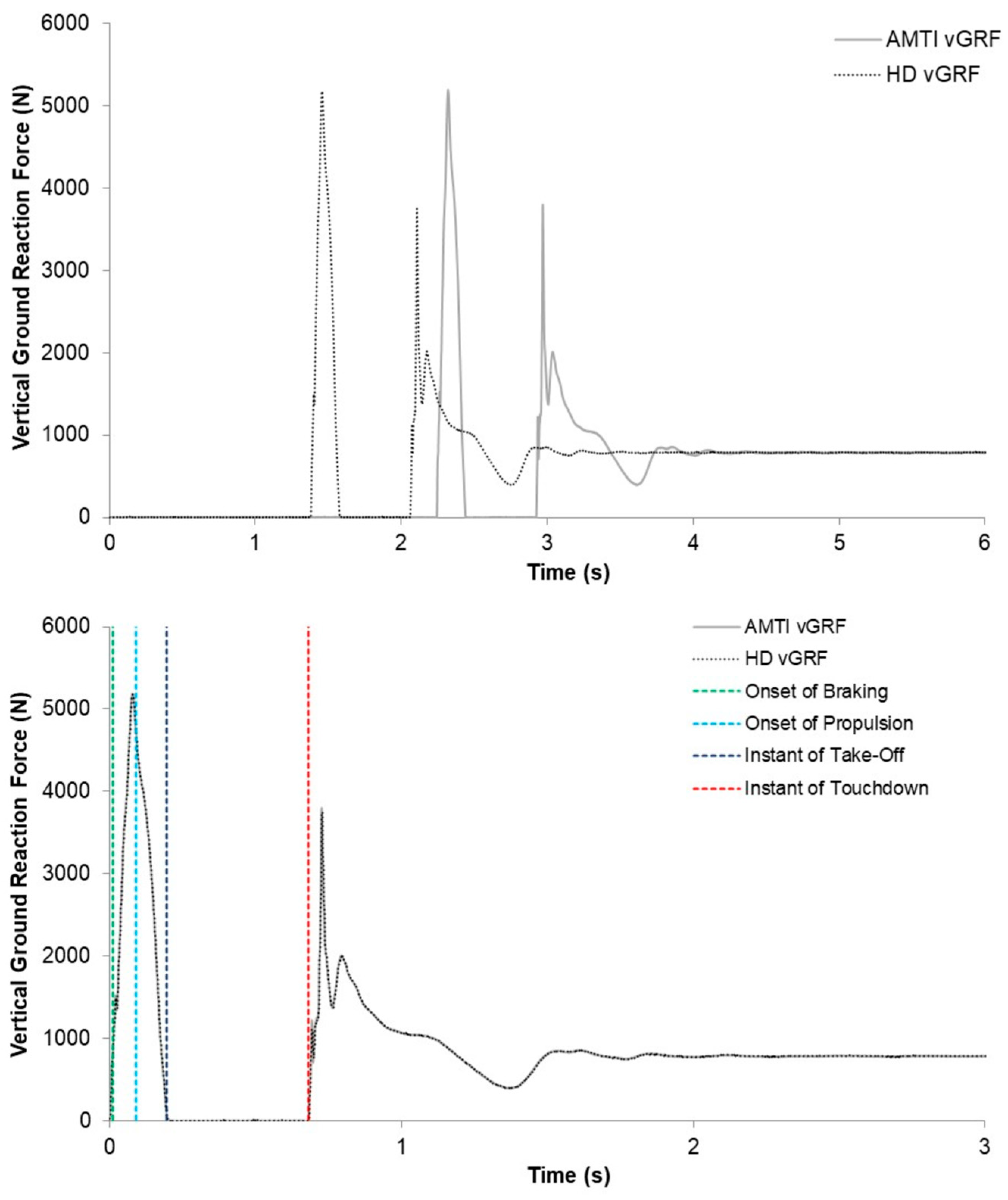
2.5. Drop Jump
2.6. Statistical Analysis
3. Results
4. Discussion
4.1. Agreement Considerations
4.2. Drop Jump Considerations
4.3. Practical Considerations
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Guthrie, B.; Jagim, A.R.; Jones, M.T. Ready or not, here I come: A scoping review of methods used to assess player readiness via indicators of neuromuscular function in football code athletes. Strength Cond. J. 2023, 45, 93–110. [Google Scholar] [CrossRef]
- McMahon, J.J.; Suchomel, T.J.; Lake, J.P.; Comfort, P. Relationship between reactive strength index variants in rugby league players. J. Strength Cond. Res. 2021, 35, 280–285. [Google Scholar] [CrossRef]
- Merrigan, J.J.; Stone, J.D.; Thompson, A.G.; Hornsby, W.G.; Hagen, J.A. Monitoring neuromuscular performance in military personnel. Int. J. Environ. Res. Public Health 2020, 17, 9147. [Google Scholar] [CrossRef]
- Weldon, A.; Duncan, M.J.; Turner, A.; Sampaio, J.; Noon, M.; Wong, D.; Lai, V.W. Contemporary practices of strength and conditioning coaches in professional soccer. Biol. Sport 2021, 38, 377–390. [Google Scholar] [CrossRef] [PubMed]
- McMahon, J.J.; Suchomel, T.J.; Lake, J.P.; Comfort, P. Understanding the key phases of the countermovement jump force-time curve. Strength Cond. J. 2018, 40, 96–106. [Google Scholar] [CrossRef]
- Merrigan, J.J.; Stone, J.D.; Galster, S.M.; Hagen, J.A. Analyzing Force-Time Curves: Comparison of Commercially Available Automated Software and Custom MATLAB Analyses. J. Strength Cond. Res. 2022, 36, 2387–2402. [Google Scholar] [CrossRef]
- Lake, J.; Augustus, S.; Austin, K.; Comfort, P.; McMahon, J.; Mundy, P.; Haff, G.G. The reliability and validity of the bar-mounted PUSH BandTM 2.0 during bench press with moderate and heavy loads. J. Sport. Sci. 2019, 37, 2685–2690. [Google Scholar] [CrossRef]
- McGuigan, M. Principles of test selection and administration. In Essentials of Strength Training and Conditioning, 4th ed.; Haff, G.G., Triplett, N.T., Eds.; Human Kinetics: Champaign, IL, USA, 2016; pp. 249–258. [Google Scholar]
- Bland, J.M.; Altman, D. Statistical methods for assessing agreement between two methods of clinical measurement. Lancet 1986, 327, 307–310. [Google Scholar] [CrossRef]
- Ludbrook, J. A primer for biomedical scientists on how to execute model II linear regression analysis. Clin. Exp. Pharmacol. Physiol. 2012, 39, 329–335. [Google Scholar] [CrossRef] [PubMed]
- Ludbrook, J. Linear regression analysis for comparing two measurers or methods of measurement: But which regression? Clin. Exp. Pharmacol. Physiol. 2010, 37, 692–699. [Google Scholar] [CrossRef] [PubMed]
- Ludbrook, J. Confidence in Altman-Bland plots: A critical review of the method of differences. Clin. Exp. Pharmacol. Physiol. 2010, 37, 143–149. [Google Scholar] [CrossRef] [PubMed]
- Ludbrook, J. Statistical techniques for comparing measurers and methods of measurement: A critical review. Clin. Exp. Pharmacol. Physiol. 2002, 29, 527–536. [Google Scholar] [CrossRef]
- Mundy, P.M.; Clarke, N.D. Reliability, validity and measurement error. In Performance Assessment in Strength and Conditioning; Routledge: Milton Park, UK, 2018; pp. 23–33. [Google Scholar]
- Ranganathan, P.; Pramesh, C.S.; Aggarwal, R. Common pitfalls in statistical analysis: Measures of agreement. Perspect. Clin. Res. 2017, 8, 187–191. [Google Scholar] [CrossRef]
- Mullineaux, D.R.; Barnes, C.A.; Batterham, A.M. Assessment of bias in comparing measurements: A reliability example. Meas. Phys. Educ. Exerc. Sci. 1999, 3, 195–205. [Google Scholar] [CrossRef]
- Ludbrook, J. Multiple comparison procedures updated. Clin. Exp. Pharmacol. Physiol. 1998, 25, 1032–1037. [Google Scholar] [CrossRef]
- Ludbrook, J. Comparing methods of measurement. Clin. Exp. Pharmacol. Physiol. 1997, 24, 198–203. [Google Scholar] [CrossRef]
- Crowder, G.E. The Validation of a Portable Dual-Force Plate System for Assessing Countermovement Jump Performance. In American Society of Biomechanics. Atlanta, GA, USA, 2020. Available online: https://www.researchgate.net/publication/343555197 (accessed on 12 April 2023).
- Lake, J.; Mundy, P.; Comfort, P.; McMahon, J.J.; Suchomel, T.J.; Carden, P. Concurrent validity of a portable force plate using vertical jump force–time characteristics. J. Appl. Biomech. 2018, 34, 410–413. [Google Scholar] [CrossRef] [PubMed]
- Peterson Silveira, R.; Stergiou, P.; Carpes, F.P.; Castro, F.A.; Katz, L.; Stefanyshyn, D.J. Validity of a portable force platform for assessing biomechanical parameters in three different tasks. Sport. Biomech. 2017, 16, 177–186. [Google Scholar] [CrossRef]
- Jidovtseff, B.; Quievre, J.; Nigel, H.; Cronin, J. Influence of jumping strategy on kinetic and kinematic variables. J. Sport. Med. Phys. Fit. 2014, 54, 129–138. [Google Scholar]
- Moir, G.L. Three Different Methods of Calculating Vertical Jump Height from Force Platform Data in Men and Women. Meas. Phys. Educ. Exerc. Sci. 2008, 12, 207–218. [Google Scholar] [CrossRef]
- Owen, N.J.; Watkins, J.; Kilduff, L.P.; Bevan, H.R.; Bennett, M.A. Development of a criterion method to determine peak mechanical power output in a countermovement jump. J. Strength Cond. Res. 2014, 28, 1552–1558. [Google Scholar] [CrossRef] [PubMed]
- Street, G.; McMillan, S.; Board, W.; Rasmussen, M.; Heneghan, J.M. Sources of error in determining countermovement jump height with the impulse method. J. Appl. Biomech. 2001, 17, 43–54. [Google Scholar] [CrossRef]
- Xu, J.; Turner, A.; Comfort, P.; Harry, J.R.; McMahon, J.J.; Chavda, S.; Bishop, C. A systematic review of the different calculation methods for measuring jump height during the countermovement and drop jump tests. Sport. Med. 2023, 53, 1055–1072. [Google Scholar] [CrossRef]
- McMahon, J.J.; Jones, P.A.; Comfort, P. Comparison of Countermovement Jump-Derived Reactive Strength Index Modified and Underpinning Force-Time Variables Between Super League and Championship Rugby League Players. J. Strength Cond. Res. 2019, 36, 226–231. [Google Scholar] [CrossRef]
- McMahon, J.J.; Lake, J.P.; Stratford, C.; Comfort, P. A proposed method for evaluating drop jump performance with one force platform. Biomechanics 2021, 1, 178–189. [Google Scholar] [CrossRef]
- Baca, N. A comparison of methods for analyzing drop jump performance. Med. Sci. Sport. Exerc. 1999, 31, 437–442. [Google Scholar] [CrossRef] [PubMed]
- Lake, J.P.; McMahon, J.J. Within-Subject Consistency of Unimodal and Bimodal Force Application during the Countermovement Jump. Sports 2018, 6, 143. [Google Scholar] [CrossRef]
- Cowling, E.J.; Steele, J.R.; McNair, P.J. Effect of verbal instructions on muscle activity and risk of injury to the anterior cruciate ligament during landing. Br. J. Sport. Med. 2003, 37, 126–130. [Google Scholar] [CrossRef]
- Hawkin Dynamics, Inc. Hawkin Dynamics Information Packet. 2021. Available online: https://www.hawkindynamics.com/hubfs/HawkinDynamics_InfoPacket2021_NewCloudv1.pdf (accessed on 10 January 2023).
- Geraldo, G.D.; Bredt, S.D.; Menzel, H.J.; Cançado, G.H.; Carvalho, L.A.; Lima, F.V.; Soares, J.D.; Andrade, A.G. Drop height is influenced by box height but not by individual stature during drop jumps. J. Phys. Educ. 2019, 30. [Google Scholar] [CrossRef]
- Costley, L.; Wallace, E.; Johnston, M.; Kennedy, R. Reliability of bounce drop jump parameters within elite male rugby players. J. Sport. Med. Phys. Fit. 2017, 58, 1390–1397. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variables | Calculation | CMJ? | DJ? |
|---|---|---|---|
| RSI (AU) | Jump Height divided by Ground Contact Time. | X | |
| mRSI (AU) | Jump Height divided by Time to Takeoff. | X | |
| Jump Height (m) | The change in centre of mass position between the instant of take-off and peak positive vertical displacement of the centre of mass during the flight phase, calculated as takeoff velocity squared divided by 19.62. | X | X |
| Flight Time (s) | The time taken to complete the flight phase. | X | X |
| Ground Contact Time (s) | The total time taken from instant of touchdown the instant of take-off. | X | |
| Time to Takeoff (s) | The total time taken from the onset of movement to the instant of take-off. | X | |
| Mean Propulsive Power (W) | The mean mechanical power applied to the centre of mass during the propulsive phase. | X | X |
| Peak Propulsive Power (W) | The peak instantaneous mechanical power applied to the centre of mass during the propulsive phase. | X | X |
| Peak Propulsive Velocity (m/s) | The peak instantaneous vertical velocity of the centre of mass during the propulsive phase. | X | X |
| Net Propulsive Impulse (N.s) | The net vertical impulse applied to the centre of mass during the propulsive phase. | X | X |
| Mean Propulsive Force (N) | The mean vertical ground reaction force applied to the centre of mass during the propulsive phase. | X | X |
| Peak Propulsive Force (N) | The peak instantaneous vertical ground reaction force applied to the centre of mass during the propulsive phase. | X | X |
| Stiffness (N/m) | Peak braking force divided by braking depth. | X | |
| Braking Depth (m) | The peak negative vertical displacement of the centre of mass during the braking phase. | X | |
| Countermovement Depth (m) | The peak negative vertical displacement of the centre of mass during the braking phase. | X | |
| Mean Braking Power (W) | The mean mechanical power applied to the centre of mass during the braking phase. | X | X |
| Peak Braking Power (W) | The peak negative instantaneous mechanical power applied to the centre of mass during the braking phase. | X | X |
| Net Braking Impulse (N.s) | The net vertical impulse applied to the centre of mass during the braking phase. | X | X |
| Mean Braking Force (N) | The mean vertical ground reaction force applied to the centre of mass during the braking phase. | X | X |
| Peak Braking Force (N) | The peak instantaneous vertical ground reaction force applied to the centre of mass during the braking phase. | X | X |
| Variables | AMTI | HD | Intercept | Slope | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| (Mean ± SD) | (Mean ± SD) | 95% CI | 95% CI | |||||||||
| mRSI (AU) | 0.43 | ± | 0.10 | 0.43 | ± | 0.10 | 0.00 | 1.01 | ||||
| −0.01 | to | 0.00 | 0.99 | to | 1.04 | |||||||
| Jump Height (m) | 0.31 | ± | 0.07 | 0.31 | ± | 0.06 | −0.01 | 1.03 | ||||
| −0.02 | to | 0.01 | 0.98 | to | 1.08 | |||||||
| Flight Time (s) | 0.51 | ± | 0.05 | 0.51 | ± | 0.05 | 0.00 | 1.00 | ||||
| −0.01 | to | 0.01 | 0.99 | to | 1.01 | |||||||
| Time to Takeoff (s) | 0.76 | ± | 0.09 | 0.77 | ± | 0.09 | −0.01 | 1.01 | ||||
| −0.06 | to | 0.00 | 0.96 | to | 1.04 | |||||||
| Mean Propulsive Power (W) | 2316.23 | ± | 481.89 | 2302.91 | ± | 480.00 | 4.24 | 1.00 | ||||
| −33.80 | to | 42.29 | 0.99 | to | 1.02 | |||||||
| Peak Propulsive Power (W) | 4124.56 | ± | 907.17 | 4107.07 | ± | 913.99 | 48.12 | 0.99 | ||||
| −17.08 | to | 113.32 | 0.98 | to | 1.01 | |||||||
| Peak Propulsive Velocity (m/s) | 2.59 | ± | 0.25 | 2.58 | ± | 0.24 | −0.07 | 1.03 | ||||
| −0.19 | to | 0.04 | 0.99 | to | 1.08 | |||||||
| Net Propulsive Impulse (N.s) | 210.34 | ± | 41.74 | 209.25 | ± | 42.08 | 2.79 | 0.99 | ||||
| −1.04 | to | 6.62 | 0.97 | to | 1.01 | |||||||
| Mean Propulsive Force (N) | 1667.56 | ± | 291.81 | 1664.07 | ± | 290.81 | −2.26 | 1.00 | ||||
| −12.43 | to | 7.91 | 1.00 | to | 1.01 | |||||||
| Peak Propulsive Force (N) | 2042.72 | ± | 343.63 | 2040.87 | ± | 343.97 | 3.92 | 1.00 | ||||
| −5.25 | to | 13.09 | 1.00 | to | 1.00 | |||||||
| Countermovement Depth (m) | −0.30 | ± | 0.06 | −0.30 | ± | 0.06 | 0.01 | 1.01 | ||||
| −0.01 | to | 0.02 | 0.97 | to | 1.06 | |||||||
| Mean Braking Power (W) | −1092.83 | ± | 274.27 | −1097.65 | ± | 273.88 | 6.37 | 1.00 | ||||
| −2.11 | to | 14.85 | 0.99 | to | 1.01 | |||||||
| Peak Braking Power (W) | −1518.54 | ± | 426.54 | −1524.72 | ± | 426.16 | 7.53 | 1.00 | ||||
| −0.77 | to | 15.83 | 1.00 | to | 1.01 | |||||||
| Net Braking Impulse (N.s) | 106.79 | ± | 25.06 | 107.32 | ± | 24.97 | −0.91 | 1.00 | ||||
| −2.07 | to | 0.26 | 0.99 | to | 1.02 | |||||||
| Mean Braking Force (N) | 1495.80 | ± | 250.73 | 1498.44 | ± | 250.90 | −1.58 | 1.00 | ||||
| −10.66 | to | 7.49 | 0.99 | to | 1.01 | |||||||
| Peak Braking Force (N) | 1951.83 | ± | 319.75 | 1952.70 | ± | 320.31 | 2.53 | 1.00 | ||||
| −11.80 | to | 16.86 | 0.99 | to | 1.01 | |||||||
| Body Weight (N) | 833.21 | ± | 141.92 | 833.69 | ± | 141.68 | −1.88 | 1.00 | ||||
| −7.80 | to | 4.03 | 1.00 | to | 1.01 | |||||||
| Variables | AMTI | HD | Intercept | Slope | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| (Mean ± SD) | (Mean ± SD) | 95% CI | 95% CI | |||||||||
| RSI (AU) | 0.91 | ± | 0.30 | 0.89 | ± | 0.30 | 0.01 | 1.01 | ||||
| −0.03 | to | 0.05 | 0.96 | to | 1.06 | |||||||
| Jump Height (m) | 0.27 | ± | 0.05 | 0.26 | ± | 0.05 | 0.01 | 0.98 | ||||
| −0.01 | to | 0.03 | 0.93 | to | 1.04 | |||||||
| Flight Time (s) | 0.47 | ± | 0.05 | 0.47 | ± | 0.05 | −0.01 | 1.03 | ||||
| −0.02 | to | 0.00 | 1.00 | to | 1.05 | |||||||
| Ground Contact Time (s) | 0.32 | ± | 0.11 | 0.32 | ± | 0.11 | 0.00 | 1.00 | ||||
| 0.00 | to | 0.00 | 1.00 | to | 1.01 | |||||||
| Mean Propulsive Power (W) | 2726.90 | ± | 585.09 | 2678.15 | ± | 575.27 | 3.03 | 1.02 | ||||
| −91.00 | to | 97.06 | 0.98 | to | 1.05 | |||||||
| Peak Propulsive Power (W) | 4525.16 | ± | 984.45 | 4448.20 | ± | 961.74 | −28.08 | 1.02 | ||||
| −315.54 | to | 259.37 | 0.95 | to | 1.10 | |||||||
| Peak Propulsive Velocity (m/s) | 2.42 | ± | 0.21 | 2.39 | ± | 0.22 | 0.12 | 0.96 | ||||
| −0.17 | to | 0.42 | 0.85 | to | 1.07 | |||||||
| Net Propulsive Impulse (N.s) | 195.39 | ± | 32.36 | 192.60 | ± | 31.68 | −1.38 | 1.02 | ||||
| −10.31 | to | 7.55 | 0.98 | to | 1.06 | |||||||
| Mean Propulsive Force (N) | 2042.37 | ± | 425.30 | 2030.98 | ± | 422.18 | −3.61 | 1.01 | ||||
| −22.47 | to | 15.25 | 1.00 | to | 1.02 | |||||||
| Peak Propulsive Force (N) | 3056.82 | ± | 839.12 | 3047.28 | ± | 837.84 | 4.92 | 1.00 | ||||
| −5.46 | to | 15.29 | 1.00 | to | 1.01 | |||||||
| Stiffness (N/m) | 19.46 | ± | 10.54 | 19.00 | ± | 10.30 | 0.02 | 1.02 | ||||
| −0.48 | to | 0.51 | 0.99 | to | 1.06 | |||||||
| Braking Depth (m) | −0.23 | ± | 0.07 | −0.23 | ± | 0.07 | 0.00 | 1.00 | ||||
| −0.01 | to | 0.01 | 0.96 | to | 1.04 | |||||||
| Mean Braking Power (W) | 3550.86 | ± | 925.72 | 3555.47 | ± | 890.29 | −146.10 | 1.04 | ||||
| −304.22 | to | 12.02 | 0.99 | to | 1.09 | |||||||
| Peak Braking Power (W) | 8258.04 | ± | 2570.69 | 8119.93 | ± | 2228.50 | −1108.73 | 1.15 | ||||
| −1853.27 | to | −364.18 | 1.06 | to | 1.25 | |||||||
| Net Braking Impulse (N.s) | 224.53 | ± | 39.35 | 225.68 | ± | 38.33 | −7.13 | 1.03 | ||||
| −19.17 | to | 4.90 | 0.98 | to | 1.07 | |||||||
| Mean Braking Force (N) | 2611.15 | ± | 647.27 | 2602.91 | ± | 638.87 | −25.97 | 1.01 | ||||
| −54.40 | to | 2.46 | 1.00 | to | 1.03 | |||||||
| Peak Braking Force (N) | 4134.00 | ± | 1163.00 | 4076.00 | ± | 1106.00 | −151.43 | 1.05 | ||||
| −319.35 | to | 16.50 | 1.00 | to | 1.10 | |||||||
| Body Weight (N) | 833.00 | ± | 142.00 | 833.00 | ± | 141.00 | −2.78 | 1.00 | ||||
| −9.60 | to | 4.03 | 1.00 | to | 1.01 | |||||||
| Variables | AMTI | HD | ||||
|---|---|---|---|---|---|---|
| (Mean ± SD) | (Mean ± SD) | |||||
| Touch-down Velocity (m/s) | −2.36 | ± | 0.26 | −2.35 | ± | 0.25 |
| Fall Height (m) | 0.35 | ± | 0.04 | 0.35 | ± | 0.04 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Badby, A.J.; Mundy, P.D.; Comfort, P.; Lake, J.P.; McMahon, J.J. The Validity of Hawkin Dynamics Wireless Dual Force Plates for Measuring Countermovement Jump and Drop Jump Variables. Sensors 2023, 23, 4820. https://doi.org/10.3390/s23104820
Badby AJ, Mundy PD, Comfort P, Lake JP, McMahon JJ. The Validity of Hawkin Dynamics Wireless Dual Force Plates for Measuring Countermovement Jump and Drop Jump Variables. Sensors. 2023; 23(10):4820. https://doi.org/10.3390/s23104820
Chicago/Turabian StyleBadby, Andrew J., Peter D. Mundy, Paul Comfort, Jason P. Lake, and John J. McMahon. 2023. "The Validity of Hawkin Dynamics Wireless Dual Force Plates for Measuring Countermovement Jump and Drop Jump Variables" Sensors 23, no. 10: 4820. https://doi.org/10.3390/s23104820
APA StyleBadby, A. J., Mundy, P. D., Comfort, P., Lake, J. P., & McMahon, J. J. (2023). The Validity of Hawkin Dynamics Wireless Dual Force Plates for Measuring Countermovement Jump and Drop Jump Variables. Sensors, 23(10), 4820. https://doi.org/10.3390/s23104820