


Remote Sensing of Seawater Temperature and Salinity Profiles by the Brillouin Lidar Based on a Fizeau Interferometer and Multichannel Photomultiplier Tube


Abstract
1. Introduction
2. System and Theory
2.1. Brillouin Lidar System
2.2. Theory of Measurement
3. System Parameters Optimization and Analysis
4. Brillouin Lidar System Performance
4.1. Detection Depth Analysis of the Lidar System
4.1.1. Experiment of Brillouin Energy Measurement
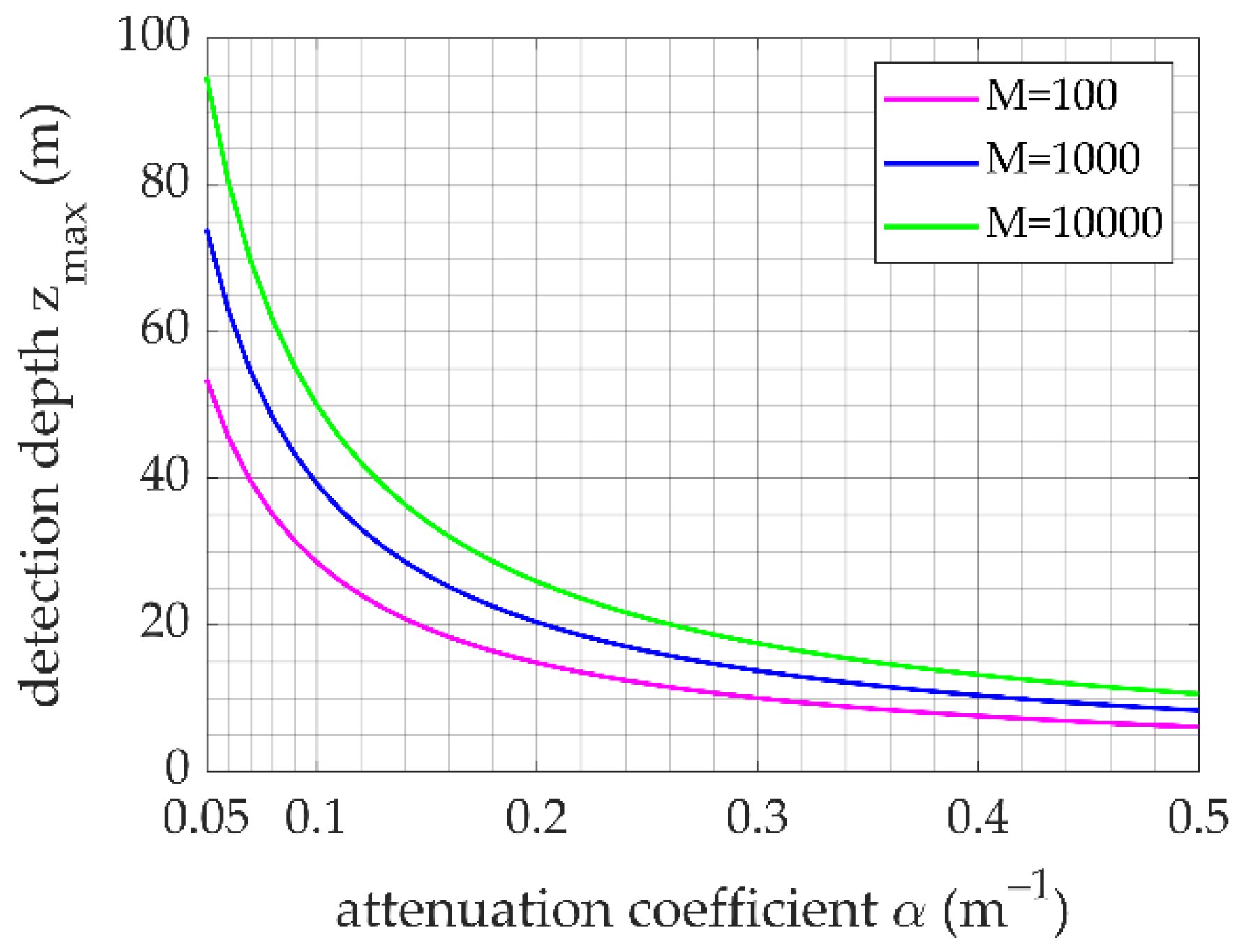
4.1.2. Analogy of Maximum Detection Depth
4.2. Detection Accuracy Analysis of Lidar System
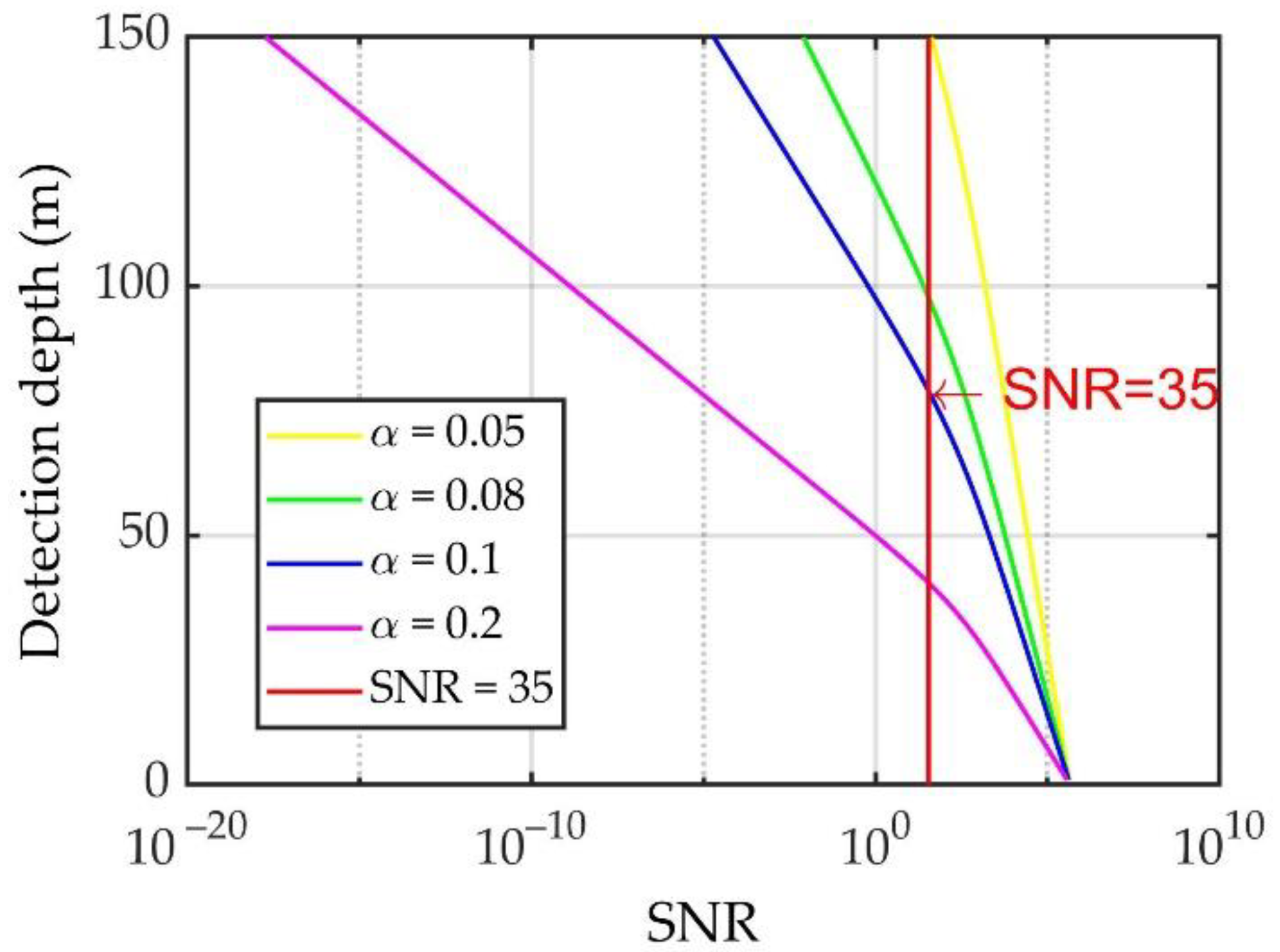
4.2.1. SNR and Measurement Depth Analysis
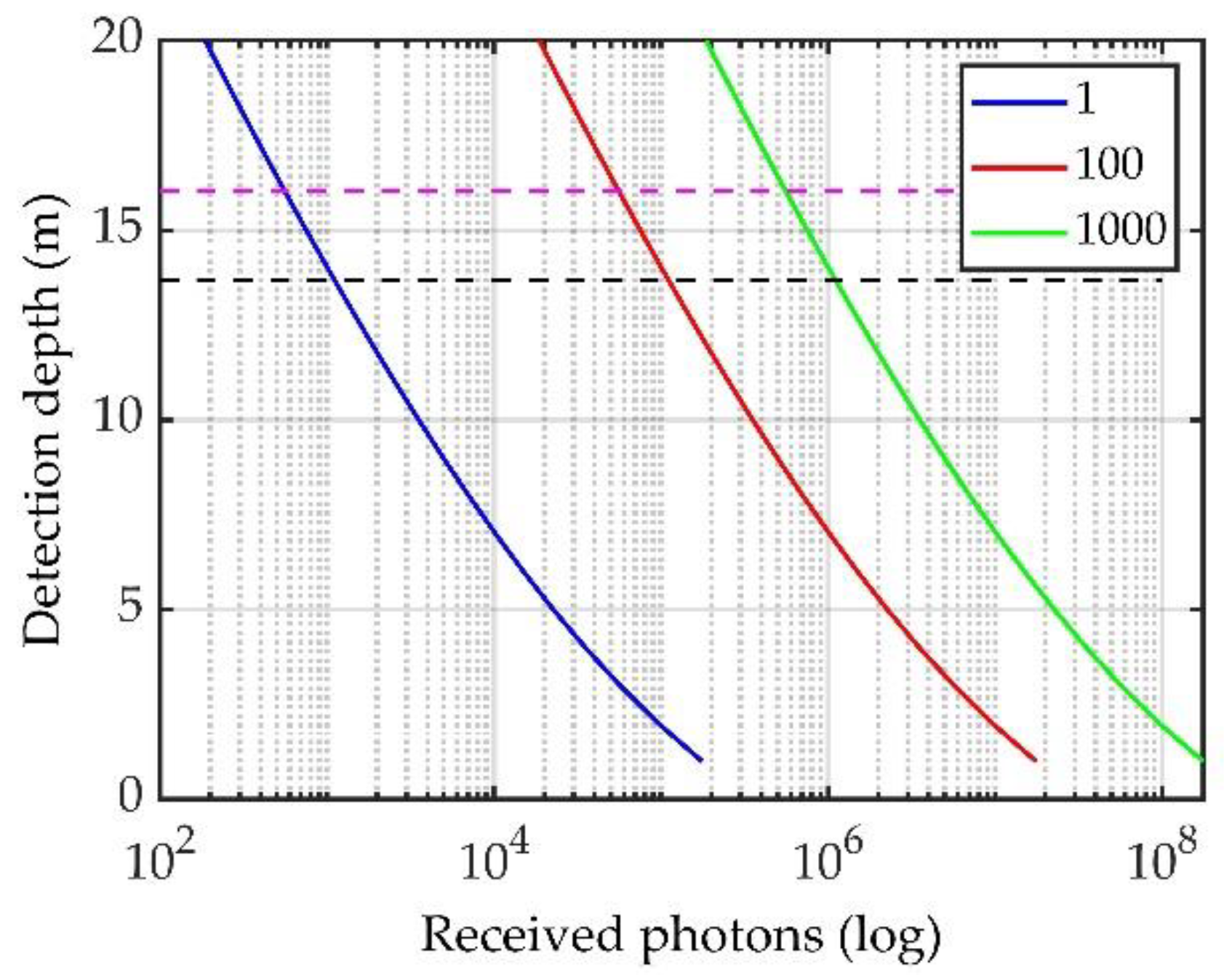
4.2.2. Echo Photon Number and Detection Depth Analysis
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Costanza, R. The ecological, economic, and social importance of the oceans. Ecol. Econ. 1999, 31, 199–213. [Google Scholar] [CrossRef]
- Allison, E.H.; Bassett, H.R. Climate change in the oceans: Human impacts and responses. Science 2015, 350, 778–782. [Google Scholar] [CrossRef] [PubMed]
- Barnes, D.K.; Tarling, G.A. Polar oceans in a changing climate. Curr. Biol. 2017, 27, R454–R460. [Google Scholar] [CrossRef] [PubMed]
- Ingleby, B.; Huddleston, M. Quality control of ocean temperature and salinity profiles—Historical and real-time data. J. Mar. Syst. 2007, 65, 158–175. [Google Scholar] [CrossRef]
- Cullum, J.; Stevens, D.P.; Joshi, M.M. Importance of ocean salinity for climate and habitability. Proc. Natl. Acad. Sci. USA 2016, 113, 4278–4283. [Google Scholar] [CrossRef]
- Wang, L.; Wang, Y.J.; Song, S.; Li, F. Overview of fibre optic sensing technology in the field of physical ocean observation. Front. Phys. 2021, 9, 745487. [Google Scholar] [CrossRef]
- Schorstein, K.; Popescu, A.; Göbel, M.; Walther, T. Remote water temperature measurements based on Brillouin scattering with a frequency doubled pulsed Yb: Doped fiber amplifier. Sensors 2008, 8, 5820–5831. [Google Scholar] [CrossRef]
- Dittrich, S.; Barcikowski, S.; Gökce, B. Plasma and nanoparticle shielding during pulsed laser ablation in liquids cause ablation efficiency decrease. Opto-Electron. Adv. 2021, 4, 200072. [Google Scholar] [CrossRef]
- Lin, X.; Feng, Q.; Zhu, Y.; Ji, S.; Xiao, B.; Xu, H.; Li, W.; Cai, Z. Diode-pumped wavelength-switchable visible Pr 3+: YLF laser and vortex laser around 670 nm. Opto-Electron. Adv. 2021, 4, 210006-1. [Google Scholar] [CrossRef]
- Zhang, C.; Zhou, W.; Geng, D.; Bai, C.; Li, W.; Chen, S.; Luo, T.; Qin, L.; Xie, Y. Laser direct writing and characterizations of flexible piezoresistive sensors with microstructures. Opto-Electron. Adv. 2021, 4, 200061-1. [Google Scholar] [CrossRef]
- Goldstein, R.M.; Zebker, H.A.; Barnett, T.P. Remote sensing of ocean currents. Science 1989, 246, 1282–1285. [Google Scholar] [CrossRef] [PubMed]
- Chen, P.; Pan, D. Ocean optical profiling in South China Sea using airborne LiDAR. Remote Sens. 2019, 11, 1826. [Google Scholar] [CrossRef]
- Liu, J.; Shi, J.; He, X.; Chen, X.; Liu, D. Comparison of three technique of Brillouin lidar for remote sensing of the ocean. Opt. Commun. 2015, 352, 161–165. [Google Scholar] [CrossRef]
- Rupp, D.; Zipf, A.; Kress, M.; Lux, K.; Walther, T.; Trees, C. A Brillouin lidar for remote sensing of the temperature profile in the ocean—Towards a simultaneous measurement of temperature and salinity. In Proceedings of the IEEE OCEANS 2017-Anchorage, Anchorage, AK, USA, 18–21 September 2017. [Google Scholar]
- Leonard, D.A.; Sweeney, H.E. Remote sensing of ocean physical properties: A comparison of Raman and Brillouin techniques. SPIE. 1988, 925, 407–414. [Google Scholar]
- Yang, Q.; Liu, H.; He, S.; Tian, Q.; Xu, B.; Wu, P. Circular cladding waveguides in Pr:YAG fabricated by femtosecond laser inscription: Raman, luminescence properties and guiding performance. Opto-Electron. Adv. 2021, 4, 200005. [Google Scholar] [CrossRef]
- Hirschberg, J.G.; Byrne, J.D.; Wouters, A.W.; Boynton, G.C. Speed of sound and temperature in the ocean by Brillouin scattering. Appl. Opt. 1984, 23, 2624–2628. [Google Scholar] [CrossRef]
- Liu, D.; Xu, J.; Li, R.; Dai, R.; Gong, W. Measurements of sound speed in the water by Brillouin scattering using pulsed Nd: YAG laser. Opt. Commun. 2002, 203, 335–340. [Google Scholar] [CrossRef]
- FRY, E.; Katz, J.; Liu, D.; Walther, T. Temperature dependence of the Brillouin linewidth in water. J. Mod. Opt. 2002, 49, 411–418. [Google Scholar] [CrossRef]
- Emery, Y.; Fry, E. Laboratory development of LIDAR for measurement of sound velocity in the ocean using Brillouin scattering. In Proceedings of the Ocean Optics XIII, Halifax, NS, Canada, 22–25 October 1996. [Google Scholar]
- Xu, J.; Ren, X.; Gong, W.; Dai, R.; Liu, D. Measurement of the bulk viscosity of liquid by Brillouin scattering. Appl. Opt. 2003, 42, 6704–6709. [Google Scholar] [CrossRef]
- Polian, A. Brillouin scattering at high pressure: An overview. J. Raman Spectrosc. 2003, 34, 633–637. [Google Scholar] [CrossRef]
- Dai, R.; Gong, W.P.; Xu, J.; Ren, X.; Liu, D. The edge technique as used in Brillouin lidar for remote sensing of the ocean. Appl. Phys. B. 2004, 79, 245–248. [Google Scholar] [CrossRef]
- Gong, W.; Shi, J.; Li, G.; Liu, D.; Katz, J.W.; Fry, E.S. Calibration of edge technique considering variation of Brillouin line width at different temperatures of water. Appl. Phys. B 2006, 83, 319–322. [Google Scholar] [CrossRef]
- Rudolf, A.; Walther, T. High-transmission excited-state Faraday anomalous dispersion optical filter edge filter based on a Halbach cylinder magnetic-field configuration. Opt. Lett. 2012, 37, 4477–4479. [Google Scholar] [CrossRef] [PubMed]
- Rudolf, A.; Walther, T. Laboratory demonstration of a Brillouin lidar to remotely measure temperature profiles of the ocean. Opt. Eng. 2014, 53, 051407. [Google Scholar] [CrossRef]
- Shi, J.; Ouyang, M.; Gong, W.; Li, S.; Liu, D. A Brillouin lidar system using F–P etalon and ICCD for remote sensing of the ocean. Appl. Phys. B 2008, 90, 569–571. [Google Scholar] [CrossRef]
- Liang, K.; Ma, Y.; Huang, J.; Li, H.; Yu, Y. Precise measurement of Brillouin scattering spectrum in the ocean using F–P etalon and ICCD. Appl. Phys. B 2011, 105, 421–425. [Google Scholar] [CrossRef]
- Huang, J.; Ma, Y.; Zhou, B.; Li, H.; Yu, Y.; Liang, K. Processing method of spectral measurement using FP etalon and ICCD. Opt. Express. 2012, 20, 18568–18578. [Google Scholar] [CrossRef]
- Liang, K.; Zhang, R.; Sun, Q.; Xu, Y.; Wu, H.; Zhang, P.; Zhou, B. Brillouin shift and linewidth measurement based on double-edge detection technology in seawater. Appl. Phys. B. 2020, 126, 1–9. [Google Scholar] [CrossRef]
- Wang, Y.; Zhang, J.; Zheng, Y.; Xu, Y.; Xu, J.; Jiao, J.; Su, Y.; Lü, H.; Liang, K. Brillouin scattering spectrum for liquid detection and applications in oceanography. Opto-Electron. Adv. 2023, 6, 220016. [Google Scholar] [CrossRef]
- Xu, J.; Witschas, B.; Liang, K.; Wang, Y.; Ubachs, W. Characterization of a novel temperature Lidar receiver by means of laboratory Rayleigh-Brillouin scattering measurements. EPJ Web Conf. 2020, 237, 07004. [Google Scholar] [CrossRef]
- Xu, J.; Witschas, B.; Kabelka, P.G.; Liang, K. High-spectral-resolution lidar for measuring tropospheric temperature profiles by means of Rayleigh–Brillouin scattering. Opt. Lett. 2021, 46, 3320–3323. [Google Scholar] [CrossRef] [PubMed]
- Liang, K.; Ma, Y.; Yu, Y.; Huang, J.; Li, H. Research on simultaneous measurement of ocean temperature and salinity using Brillouin shift and linewidth. Opt. Eng. 2012, 51, 066002. [Google Scholar] [CrossRef]
- Hall, T.A. Fizeau interferometer profiles at finite acceptance angles. J. Phys. E: Sci. Instr. 1969, 2, 837. [Google Scholar] [CrossRef]
- Novák, O.; Falconer, I.S.; Sanginés, R.; Lattemann, M.; Tarrant, R.N.; McKenzie, D.R.; Bilek, M.M.M. Fizeau interferometer system for fast high resolution studies of spectral line shapes. Rev. Sci. Instrum. 2011, 82, 023105. [Google Scholar] [CrossRef]
- Multi Anode Photomultiplier Module H12310-42. Available online: https://www.hamamatsu.com.cn/content/dam/hamamatsu-photonics/sites/documents/99_SALES_LIBRARY/etd/H12310_H12311_TPMO1060E.pdf (accessed on 10 November 2022).
- O’Connor, C.L.; Schlupf, J.P. Brillouin scattering in water: The Landau—Placzek ratio. J. Chem. Phys. 1967, 47, 31–38. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| Laser energy E | 20 mJ | Pulse width | 10 ns |
| Laser wavelength λ | 532 nm | Brillouin backscattering coefficient | |
| Telescope radius r | 0.05 m | Height H | 100 m |
| Attenuation coefficient | 0.08 | Atmospheric attenuation efficiency | 0.81 |
| Detection efficiency | 0.13 | Optical efficiency | 0.4 |
| Refractive index n | 1.33 | Repetitive frequency | 100 Hz |
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| Laser energy E0 | 0.2 mJ | Pulse width | 10 ns |
| Laser wavelength | 532.293 nm | Repetitive frequency | 100 Hz |
| Telescope diameter d0 | 0.025 m | Scattering angle θ | 179° |
| Attenuation coefficient | 0.099 | Height H0 | 2.45 m |
| Averaging number M0 | 100 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Y.; Xu, Y.; Chen, P.; Liang, K. Remote Sensing of Seawater Temperature and Salinity Profiles by the Brillouin Lidar Based on a Fizeau Interferometer and Multichannel Photomultiplier Tube. Sensors 2023, 23, 446. https://doi.org/10.3390/s23010446
Wang Y, Xu Y, Chen P, Liang K. Remote Sensing of Seawater Temperature and Salinity Profiles by the Brillouin Lidar Based on a Fizeau Interferometer and Multichannel Photomultiplier Tube. Sensors. 2023; 23(1):446. https://doi.org/10.3390/s23010446
Chicago/Turabian StyleWang, Yuanqing, Yangrui Xu, Ping Chen, and Kun Liang. 2023. "Remote Sensing of Seawater Temperature and Salinity Profiles by the Brillouin Lidar Based on a Fizeau Interferometer and Multichannel Photomultiplier Tube" Sensors 23, no. 1: 446. https://doi.org/10.3390/s23010446
APA StyleWang, Y., Xu, Y., Chen, P., & Liang, K. (2023). Remote Sensing of Seawater Temperature and Salinity Profiles by the Brillouin Lidar Based on a Fizeau Interferometer and Multichannel Photomultiplier Tube. Sensors, 23(1), 446. https://doi.org/10.3390/s23010446