

Development of a Wearable Haptic Glove Presenting Haptic Sensation by Electrical Stimulation

Abstract
1. Introduction
2. Materials and Methods
2.1. Propriate Stimulation Areas and Stimulus Signals
2.1.1. Stimulation Areas
2.1.2. Subjects and Experimental Devices
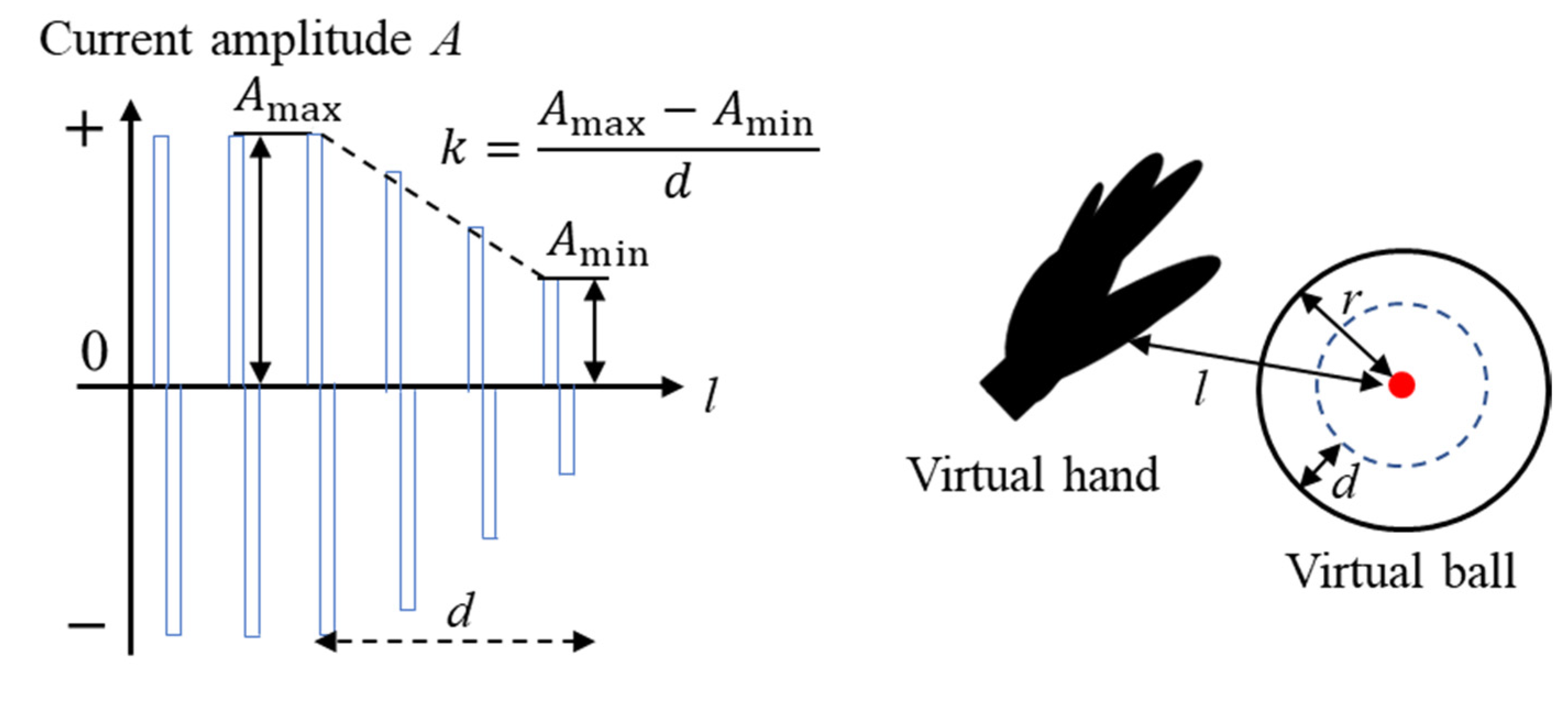
2.1.3. Stimulus Signals
2.1.4. Experimental Conditions
2.1.5. Propriate Stimulation Areas and Stimulus Signals
2.2. Eliminating Tingling Sensation
2.2.1. Voltage Divider Circuit Design Guideline
2.2.2. Verification Experiment
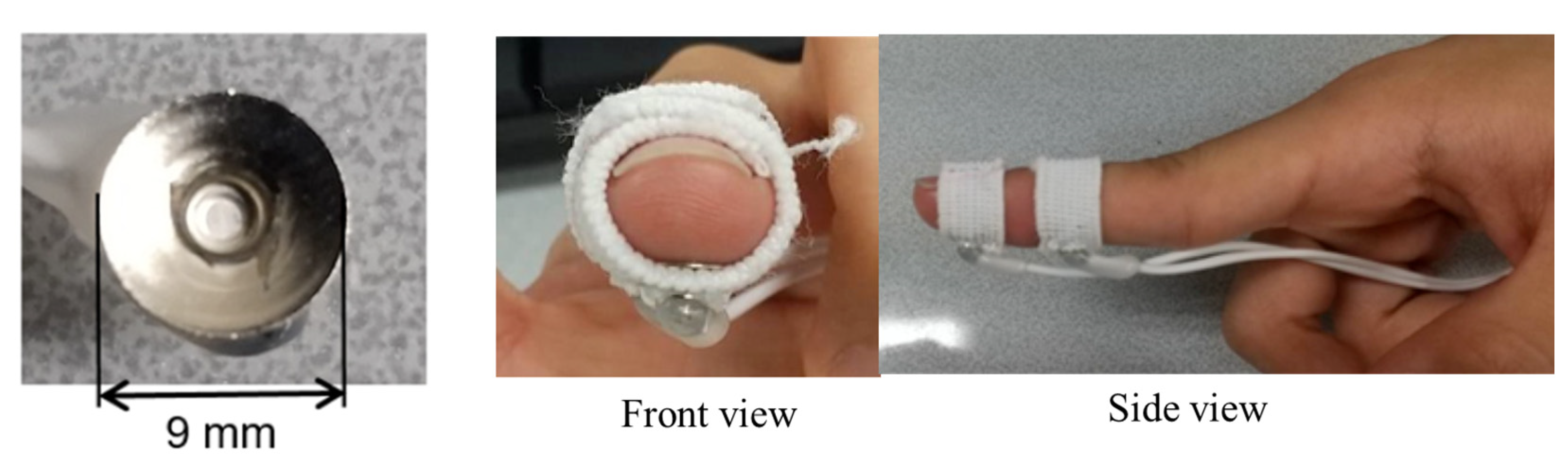
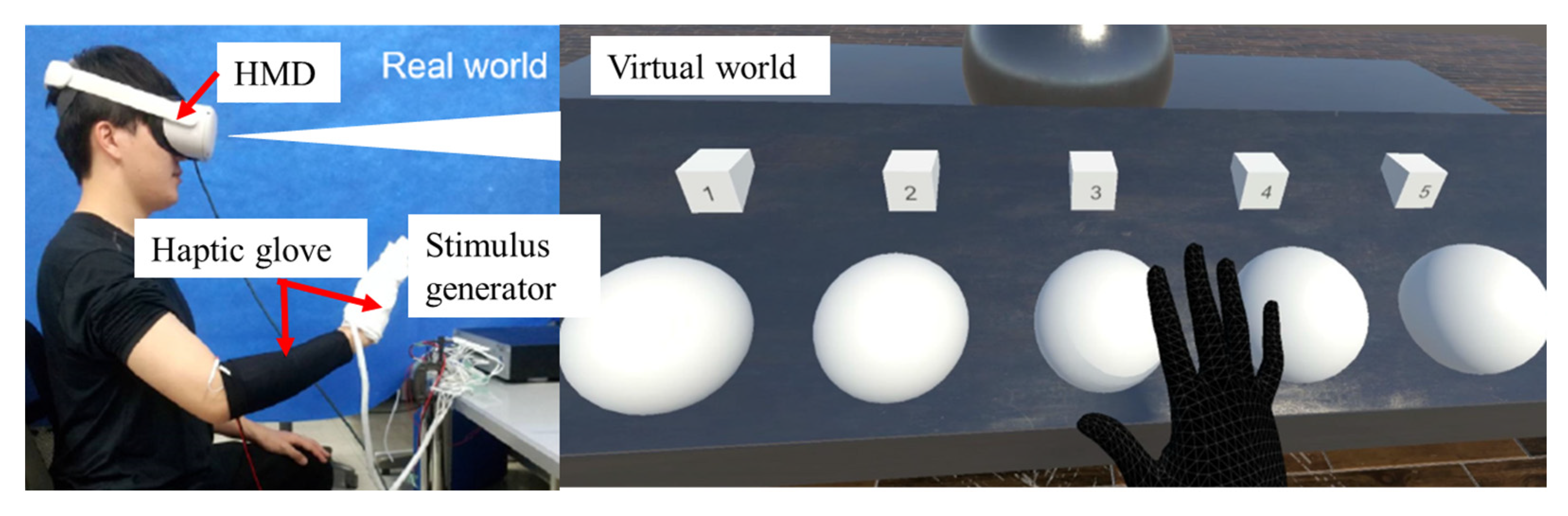
2.3. Wearable Haptic Glove System Prototype
3. Results
3.1. Stimulus Signals
3.2. Experimental Procedure
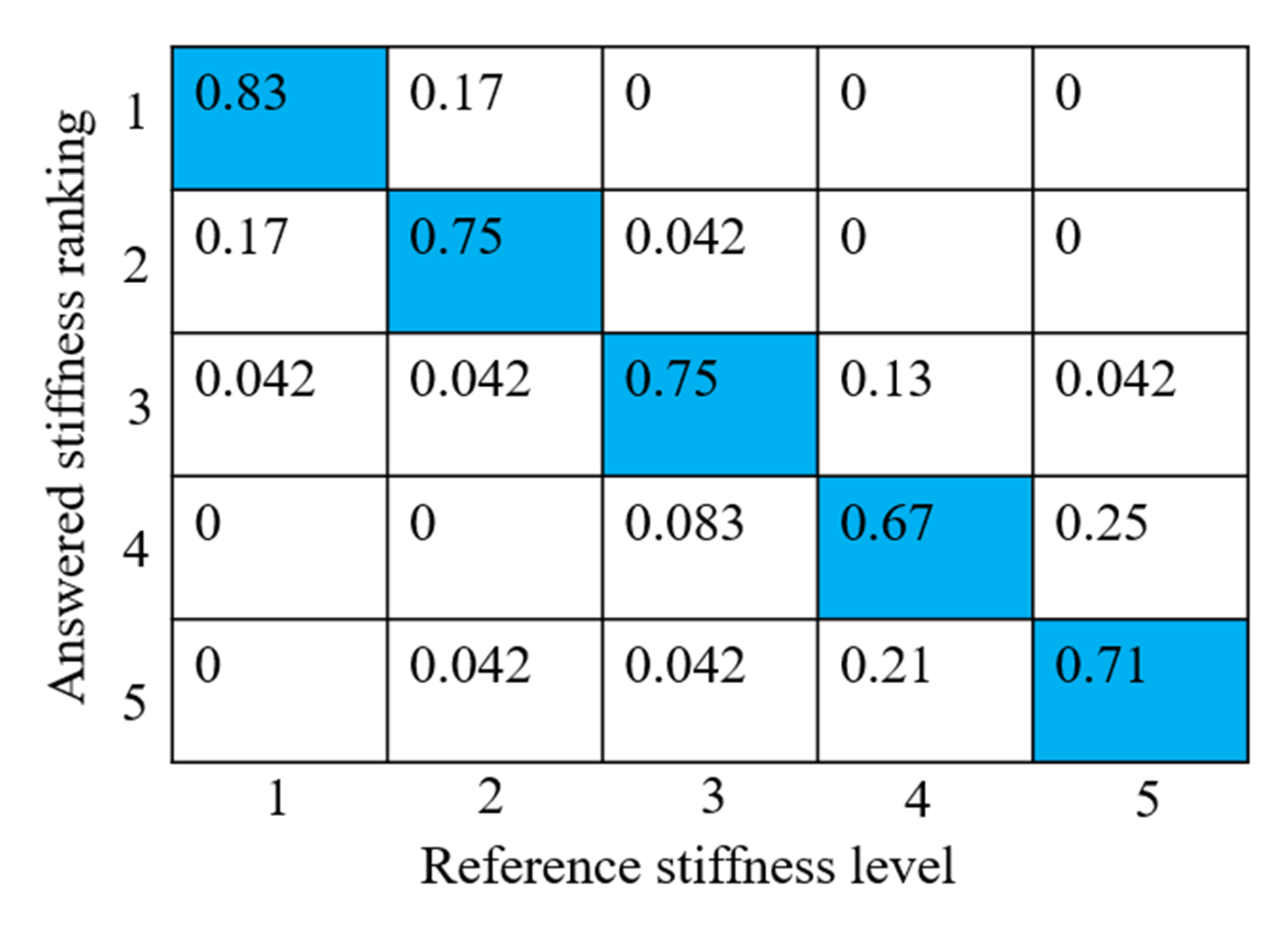
3.3. Experimental Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Subject No. | Current Amplitude when Muscle Contraction Appears (mA) | Current Amplitude when Muscle Contraction 1 N (mA) | Current Amplitude when Muscle Contraction 5 N (mA) |
|---|---|---|---|
| 1 | 7.0 | 9.0 | 13.0 |
| 2 | 7.0 | 9.0 | 12.5 |
| 3 | 7.0 | 9.0 | 12.0 |
| 4 | 8.0 | 10.0 | 14.5 |
| 5 | 9.5 | 11.0 | 14.5 |
| 6 | 11.0 | 13.0 | 14.5 |
| 7 | 10.0 | 12.0 | 16.0 |
| 8 | 9.0 | 11.5 | 15.5 |
References
- Vitense, H.S.; Jacko, J.A.; Emery, V.K. Multimodal feedback: An assessment of performance and mental workload. Ergonomics 2003, 46, 68–87. [Google Scholar] [CrossRef] [PubMed]
- Touch, X. Available online: https://www.3dsystems.com/haptics-devices/touch-x?smtNoRedir=1 (accessed on 9 November 2022).
- Omega.3. Available online: https://www.forcedimension.com/products (accessed on 9 November 2022).
- Liu, L.; Miyake, S.; Akahane, K.; Sato, M. Development of String-based Multi-finger Haptic Interface SPIDAR-MF. In Proceedings of the 23rd International Conference on Artificial Reality and Telexistence (ICAT), Tokyo, Japan, 11–13 December 2013. [Google Scholar]
- Hapt, X. Available online: https://haptx.com/robotics/ (accessed on 9 November 2022).
- CyberGrasp. Available online: http://www.cyberglovesystems.com/cybergrasp (accessed on 9 November 2022).
- Terrile, S.; Miguelañez, J.; Barrientos, A. A Soft Haptic Glove Actuated with Shape Memory Alloy and Flexible Stretch Sensors. Sensors 2021, 21, 5278. [Google Scholar] [CrossRef] [PubMed]
- Ji, X.; Liu, X.; Cacucciolo, V.; El Haitami, A.; Cantin, S.; Perriard, Y.; Shea, H. Untethered Feel-Through Haptics Using 18-µm Thick Dielectric Elastomer Actuators. Adv. Funct. Mater. 2021, 31, 2006639. [Google Scholar] [CrossRef]
- Sousa, A.S.P.; Moreira, J.; Silva, C.; Mesquita, I.; Macedo, R.; Silva, A.; Santos, R. Usability of Functional Electrical Stimulation in Upper Limb Rehabilitation in Post-Stroke Patients: A Narrative Review. Sensors 2022, 22, 1409. [Google Scholar] [CrossRef] [PubMed]
- Kajimoto, H.; Kawakami, N.; Tachi, S.; Inami, M. SmartTouch: Electric skin to touch the untouchable. IEEE Comput. Graph. Appl. 2004, 24, 36–43. [Google Scholar] [CrossRef] [PubMed]
- Kajimoto, H. Electrotactile display with real-time impedance feedback using pulse width modulation. IEEE Trans. Haptics 2012, 5, 184–188. [Google Scholar] [CrossRef] [PubMed]
- Yem, V.; Okazaki, R.; Kajimoto, H. FinGAR: Combination of Electrical and Mechanical Stimulation for High-fidelity Tactile Presentation. In Proceedings of the International Conference on Computer Graphics and Interactive Techniques, Anaheim, CA, USA, 24–28 July 2016. [Google Scholar]
- Lopes, P.; Baudisch, P.; Force, M.-P. Feedback: Bringing Force feedback to mobile devices. In Proceedings of the SIGCHI Conference on Human Factors in Computing Systems, Paris, France, 27 April–2 May 2013. [Google Scholar]
- Hasegawa, Y.; Kitamura, T.; Sakaino, S.; Tsuji, T. Bilateral control of elbow and shoulder joints using functional electrical stimulation between humans and robots. IEEE Access 2020, 8, 15792–15799. [Google Scholar] [CrossRef]
- Mizuhara, R.; Takahashi, A.; Elemphasize, K.H. Emphasizing Mechanical Tactile Sensation via Electrical Stimulation. In Proceedings of the SIGGRAPH, Online, 24 August 2020. [Google Scholar]
- Lopes, P.; Ion, A.; Baudisch, P. Impacto: Simulating Physical Impact by Combining Tactile Stimulation with Electrical Muscle Stimulation. In Proceedings of the Annual ACM Symposium on User Interface Software & Technology, Charlotte, NC, USA, 11–19 November 2015. [Google Scholar]
- Takahashi, A.; Tanabe, K.; Kajimoto, H. Haptic interface using tendon electrical stimulation with consideration of multimodal presentation. Virtual Real. Intell. Hardw. 2019, 1, 163–175. [Google Scholar] [CrossRef]
- Luna, V.; Krenn, M.; Ramirez, J.; Mayr, W. Dynamic impedance model of the skin-electrode interface for transcutaneous electrical stimulation. PLoS ONE 2015, 10, e0125609. [Google Scholar]
- Iwamura, Y. Touch; IGAKU-SHOIN: Tokyo, Japan, 2001; pp. 37–38. [Google Scholar]
- Kandel, E.R.; Schwartz, J.H.; Jessell, T.M.; Siegelbaum, S.A.; Hudspeth, A.J. Principles of Neural Science, 5th ed.; McgGraw Hill Education: New York, NY, USA, 2012; pp. 483–485. [Google Scholar]
- Kajimoto, H. Immobile Haptic Interface Using Tendon Electrical Stimulation. In Proceedings of the International Conference on Advances in Computer Entertainment Technology, Kathmandu, Nepal, 3–5 November 2012; pp. 513–516. [Google Scholar]
- Katoh, M.; Nishimura, N.; Yokoyama, M.; Hachisu, T.; Sato, M.; Fukushima, S.; Kajimoto, H. Optimal Selection of Electrodes for Muscle Electrical Stimulation Using Twitching Motion Measurement. In Proceedings of the 4th Augmented Human International Conference, Stuttgart, Germany, 7–8 March 2013; pp. 237–238. [Google Scholar]
- Kurita, Y.; Ishikawa, T.; Tsuji, T. Stiffness Display by Muscle Contraction Via Electric Muscle Stimulation. IEEE Robot. Autom. Lett. 2016, 2, 1014–1019. [Google Scholar]
- Takahashi, A.; Tanabe, K.; Kajimoto, H. Investigation on the Cutaneous/Proprioceptive Contribution to the Force Sensation Induced by Electrical Stimulation Above Tendon. In Proceedings of the 24th ACM Symposium on Virtual Reality Software and Technology, New York, NY, USA, 28 November–1 December 2018. [Google Scholar]











| Subject no. | Stimulating Area | ||||
|---|---|---|---|---|---|
| 1 | Hand palm (P) | − | − | 6.0 | 7.0 |
| Wrist extensor digitorum (W) | 11.0 | 9.0 | − | − | |
| Elbow biceps (E) | 11.0 | 10.0 | − | − | |
| 2 | Hand palm (P) | − | − | 6.0 | 9.0 |
| Wrist extensor digitorum (W) | 13.0 | 14.0 | − | − | |
| Elbow biceps (E) | 14.0 | 12.0 | − | − | |
| 3 | Hand palm (P) | − | − | 4.0 | 7.0 |
| Wrist extensor digitorum (W) | 8.0 | 6.5 | − | − | |
| Elbow biceps (E) | 11.0 | 9.0 | − | − | |
| 4 | Hand palm (P) | − | − | 6.0 | 8.0 |
| Wrist extensor digitorum (W) | 11.0 | 9.0 | − | − | |
| Elbow biceps (E) | 11.0 | 11.0 | − | − | |
| 5 | Hand palm (P) | − | − | 6.0 | 8.0 |
| Wrist extensor digitorum (W) | 11.0 | 9.0 | − | − | |
| Elbow biceps (E) | 12.0 | 11.0 | − | − | |
| 6 | Hand palm (P) | − | − | 5.0 | 8.0 |
| Wrist extensor digitorum (W) | 12.0 | 9.0 | − | − | |
| Elbow biceps (E) | 11.0 | 10.0 | − | − | |
| 7 | Hand palm (P) | − | − | 4.0 | 5.0 |
| Wrist extensor digitorum (W) | 9.0 | 7.0 | − | − | |
| Elbow biceps (E) | 12.0 | 10.0 | − | − | |
| 8 | Hand palm (P) | − | − | 8.0 | 4.0 |
| Wrist extensor digitorum (W) | 8.0 | 7.5 | − | − | |
| Elbow biceps (E) | 11.0 | 11.0 | − | − |
| Condition | Stimulating Area | Stimulus Signals |
|---|---|---|
| H | Hand palm only | Intermittent |
| W | Wrist extensor digitorum only | Changing amplitude |
| H + W | Palm, wrist extensor digitorum | Intermittent + change amplitude |
| H* + W | Continuous + change amplitude | |
| H + W + E | Palm, wrist extensor digitorum, elbow biceps | Intermittent + change amplitude |
| H* + W + E | Continuous + change amplitude |
| Stimulus Area | Stimulus Signals | Pulse Width (µs) | Frequency (Hz) | Current Amplitude (mA) | Duration (s) |
|---|---|---|---|---|---|
| DIP and PIP joints of five fingers | Intermittent bidirectional square wave (Figure 2b) | 200 | 50 | 2.4 | 0.4 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, D.; Hayakawa, W.; Nakajima, Y.; Tadano, K. Development of a Wearable Haptic Glove Presenting Haptic Sensation by Electrical Stimulation. Sensors 2023, 23, 431. https://doi.org/10.3390/s23010431
Zhou D, Hayakawa W, Nakajima Y, Tadano K. Development of a Wearable Haptic Glove Presenting Haptic Sensation by Electrical Stimulation. Sensors. 2023; 23(1):431. https://doi.org/10.3390/s23010431
Chicago/Turabian StyleZhou, Dongbo, Wataru Hayakawa, Yoshikazu Nakajima, and Kotaro Tadano. 2023. "Development of a Wearable Haptic Glove Presenting Haptic Sensation by Electrical Stimulation" Sensors 23, no. 1: 431. https://doi.org/10.3390/s23010431
APA StyleZhou, D., Hayakawa, W., Nakajima, Y., & Tadano, K. (2023). Development of a Wearable Haptic Glove Presenting Haptic Sensation by Electrical Stimulation. Sensors, 23(1), 431. https://doi.org/10.3390/s23010431