



A Wearable-Sensor System with AI Technology for Real-Time Biomechanical Feedback Training in Hammer Throw †



Abstract
1. Introduction
1.1. Current Wearable Progress in Human Motor Skill Analysis
1.2. Hammer-Throw Related Work
2. Wearable-Sensor System Design and Development
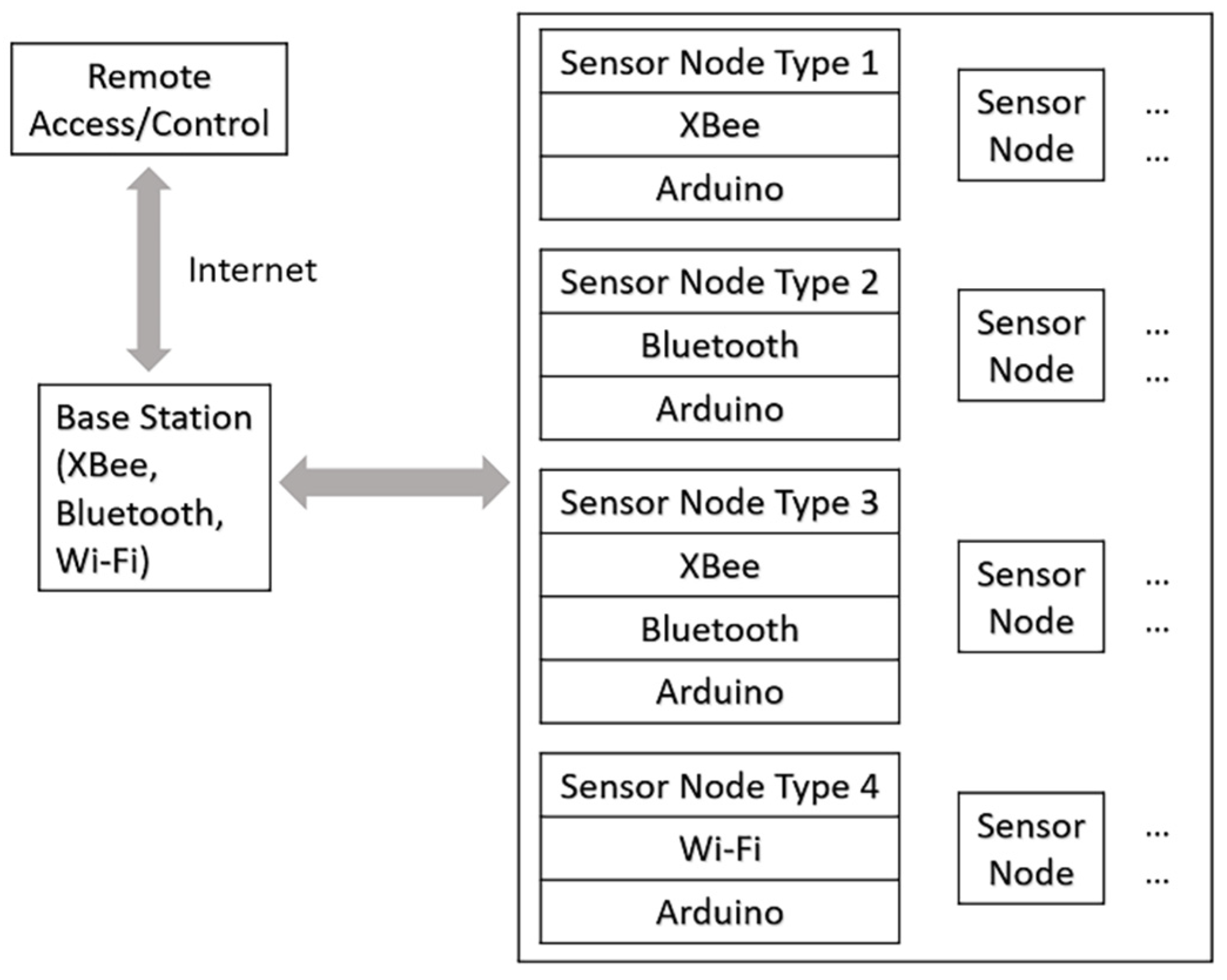
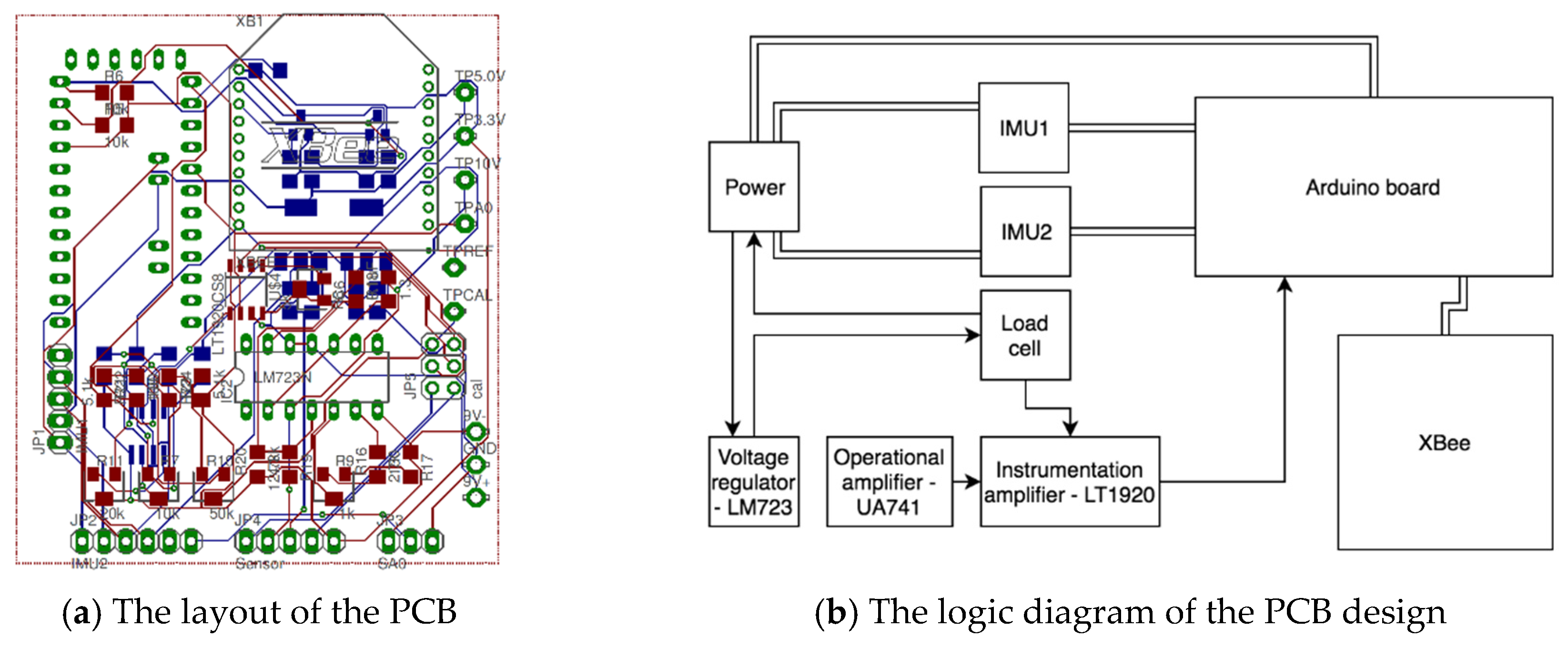
2.1. System Architecture and Hardware Development
2.2. Deep Learning Model
3. Results
3.1. Calibration for the Load Cell
3.2. Deep Learning
4. Discussion
4.1. Issues Related to Practicality of Wearable Technology
4.2. Potential of AI in the Development of Biomechanical Wearables
4.3. Limitations and Suggestions
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Fineman, R.A.; Stirling, L.A. Quantification and visualization of coordination during non-cyclic upper extremity motion. J. Biomech. 2017, 63, 82–91. [Google Scholar] [CrossRef] [PubMed]
- Proietti, T.; Guigon, E.; Roby-Brami, A.; Jarrassé, N. Modifying upper-limb inter-joint coordination in healthy subjects by training with a robotic exoskeleton. J. Neuroeng. Rehabil. 2017, 14, 55. [Google Scholar] [CrossRef] [PubMed]
- Mulloy, F.; Irwin, G.; Williams, G.K.R.; Mullineaux, D.R. Quantifying bi-variate coordination variability during longitudinal motor learning of a complex skill. J. Biomech. 2019, 95, 109295. [Google Scholar] [CrossRef] [PubMed]
- Shan, G.; Visentin, P.; Zhang, X.; Hao, W.; Yu, D. Bicycle kick in soccer: Is the virtuosity systematically entrainable? Sci. Bull. 2015, 60, 819–821. [Google Scholar] [CrossRef]
- Liu, S.; Zhang, J.; Zhang, Y.; Zhu, R. A wearable motion capture device able to detect dynamic motion of human limbs. Nat. Commun. 2020, 11, 5615. [Google Scholar] [CrossRef]
- Wang, Y. A Reconfigurable and Wearable Wireless Sensor System and Its Case Study in the Training of Hammer Throwers; ProQuest: Ann Arbor, MI, USA, 2020. [Google Scholar]
- Shan, G.; Westerhoff, P. Full-body kinematic characteristics of the maximal instep Soccer kick by male soccer players and parameters related to kick quality. Sport. Biomech. 2005, 4, 59–72. [Google Scholar] [CrossRef]
- Wang, Y.; Li, H.; Wan, B.; Zhang, X.; Shan, G. Obtaining vital distances using wearable inertial measurement unit for real-time, biomechanical feedback training in hammer-throw. Appl. Sci. 2018, 8, 2470. [Google Scholar] [CrossRef]
- Zhang, X.; Shan, G.; Wang, Y.; Wan, B.; Li, H. Wearables, biomechanical feedback, and human motor-skills’ learning & optimization. Appl. Sci. 2019, 9, 226. [Google Scholar] [CrossRef]
- Brice, S.M.; Ness, K.F.; Rosemond, D. An analysis of the relationship between the linear hammer speed and the thrower applied forces during the hammer throw for male and female throwers. Sport. Biomech. 2011, 10, 174–184. [Google Scholar] [CrossRef]
- Hornyak, T. Smarter, not harder. The young discipline of sports science is finding ways to stretch boundaries of human biology. Nature 2017, 549, S1–S3. [Google Scholar] [CrossRef]
- Hughes, G.T.G.; Camomilla, V.; Vanwanseele, B.; Harrison, A.J.; Fong, D.T.P.; Bradshaw, E.J. Novel technology in sports biomechanics: Some words of caution. Sport. Biomech. 2021, 1–9. [Google Scholar] [CrossRef] [PubMed]
- Cust, E.E.; Sweeting, A.J.; Ball, K.; Robertson, S. Machine and deep learning for sport-specific movement recognition: A systematic review of model development and performance. J. Sports Sci. 2019, 37, 568–600. [Google Scholar] [CrossRef] [PubMed]
- Blair, S.; Duthie, G.; Robertson, S.; Hopkins, W.; Ball, K. Concurrent validation of an inertial measurement system to quantify kicking biomechanics in four football codes. J. Biomech. 2018, 73, 24–32. [Google Scholar] [CrossRef] [PubMed]
- McDevitt, S.; Hernandez, H.; Hicks, J.; Lowell, R.; Bentahaikt, H.; Burch, R.; Ball, J.; Chander, H.; Freeman, C.; Taylor, C.; et al. Wearables for Biomechanical Performance Optimization and Risk Assessment in Industrial and Sports Applications. Bioengineering 2022, 9, 33. [Google Scholar] [CrossRef] [PubMed]
- Weizman, Y.; Tirosh, O.; Fuss, F.K.; Tan, A.M.; Rutz, E. Recent State of Wearable IMU Sensors Use in People Living with Spasticity: A Systematic Review. Sensors 2022, 22, 1791. [Google Scholar] [CrossRef]
- Chambers, R.; Gabbett, T.J.; Cole, M.H.; Beard, A. The Use of Wearable Microsensors to Quantify Sport-Specific Movements. Sport. Med. 2015, 45, 1065–1081. [Google Scholar] [CrossRef] [PubMed]
- van der Kruk, E.; Reijne, M.M. Accuracy of human motion capture systems for sport applications; state-of-the-art review. Eur. J. Sport Sci. 2018, 18, 806–819. [Google Scholar] [CrossRef]
- Yu, G.; Jang, Y.J.; Kim, J.; Kim, J.H.; Kim, H.Y.; Kim, K.; Panday, S.B. Potential of IMU sensors in performance analysis of professional alpine skiers. Sensors 2016, 16, 463. [Google Scholar] [CrossRef]
- Hribernik, M.; Umek, A.; Tomažič, S.; Kos, A. Review of Real-Time Biomechanical Feedback Systems in Sport and Rehabilitation. Sensors 2022, 22, 3006. [Google Scholar] [CrossRef]
- Al-Amri, M.; Nicholas, K.; Button, K.; Sparkes, V.; Sheeran, L.; Davies, J.L. Inertial measurement units for clinical movement analysis: Reliability and concurrent validity. Sensors 2018, 18, 719. [Google Scholar] [CrossRef]
- Lapinski, M.; Medeiros, C.B.; Scarborough, D.M.; Berkson, E.; Gill, T.J.; Kepple, T.; Paradiso, J.A. A wide-range, wireless wearable inertial motion sensing system for capturing fast athletic biomechanics in overhead pitching. Sensors 2019, 19, 3637. [Google Scholar] [CrossRef] [PubMed]
- Camomilla, V.; Bergamini, E.; Fantozzi, S.; Vannozzi, G. Trends supporting the in-field use of wearable inertial sensors for sport performance evaluation: A systematic review. Sensors 2018, 18, 873. [Google Scholar] [CrossRef] [PubMed]
- Preatoni, E.; Bergamini, E.; Fantozzi, S.; Giraud, L.I.; Orejel Bustos, A.S.; Vannozzi, G.; Camomilla, V. The Use of Wearable Sensors for Preventing, Assessing, and Informing Recovery from Sport-Related Musculoskeletal Injuries: A Systematic Scoping Review. Sensors 2022, 22, 3225. [Google Scholar] [CrossRef] [PubMed]
- Xiang, L.; Wang, A.; Gu, Y.; Zhao, L.; Shim, V. Recent Machine Learning Progress in Lower Limb Running Biomechanics With Wearable Technology: A Systematic Review. Front. Neurorobot. 2022, 16, 913052. [Google Scholar] [CrossRef] [PubMed]
- Ancillao, A.; Tedesco, S.; Barton, J.; O’flynn, B. Indirect measurement of ground reaction forces and moments by means of wearable inertial sensors: A systematic review. Sensors 2018, 18, 2564. [Google Scholar] [CrossRef]
- Jiang, X.; Napier, C.; Hannigan, B.; Eng, J.J.; Menon, C. Estimating vertical ground reaction force during walking using a single inertial sensor. Sensors 2020, 20, 4345. [Google Scholar] [CrossRef]
- Sy, L.; Raitor, M.; Del Rosario, M.; Khamis, H.; Kark, L.; Lovell, N.H.; Redmond, S.J. Estimating Lower Limb Kinematics Using a Reduced Wearable Sensor Count. IEEE Trans. Biomed. Eng. 2021, 68, 1293–1304. [Google Scholar] [CrossRef]
- Oubre, B.; Lane, S.; Holmes, S.; Boyer, K.; Lee, S.I. Estimating Ground Reaction Force and Center of Pressure Using Low-Cost Wearable Devices. IEEE Trans. Biomed. Eng. 2022, 69, 1461–1468. [Google Scholar] [CrossRef]
- Stetter, B.J.; Krafft, F.C.; Ringhof, S.; Stein, T.; Sell, S. A Machine Learning and Wearable Sensor Based Approach to Estimate External Knee Flexion and Adduction Moments During Various Locomotion Tasks. Front. Bioeng. Biotechnol. 2020, 8, 9. [Google Scholar] [CrossRef]
- Wang, Y.; Wan, B.; Li, H.; Shan, G. A wireless sensor system for a biofeedback training of hammer throwers. Springerplus 2016, 5, 1395. [Google Scholar] [CrossRef]
- Tiedemann, S.; Menrad, T.; Witte, K. Application of Inertial Sensors to Identify Performance-Relevant Parameters in Olympic Hammer Throw. Int. J. Environ. Res. Public Health 2022, 19, 5402. [Google Scholar] [CrossRef] [PubMed]
- Arduino: Arduino Pro Mini. Available online: https://www.arduino.cc/en/pmwiki.php?n=Main/ArduinoBoardProMini (accessed on 28 August 2021).
- Digi XBee 802.15.4. Available online: https://www.digi.com/products/embedded-systems/digi-xbee/rf-modules/2-4-ghz-rf-modules/xbee-802-15-4 (accessed on 28 August 2021).
- Pololu MinIMU-9 v5 Gyro, Accelerometer, and Compass (LSM6DS33 and LIS3MDL Carrier). Available online: https://www.pololu.com/product/2738 (accessed on 28 August 2021).
- Omega High Accuracy, Miniature Button Compression Load Cell. Available online: https://www.omega.com/en-us/force-strain-measurement/load-cells/p/LCGD (accessed on 28 August 2021).
- Avnet: Internet of Things: Low Power, Low Cost, Connected Devices Fuel Demand for Microco. Available online: https://www.avnet.com/wps/portal/us/resources/technical-articles/article/iot/internet-of-things-low-power-low-cost-connected-devices-fuel-demand-for-microco/ (accessed on 29 August 2021).
- Madgwick, S.O.H.; Wilson, S.; Turk, R.; Burridge, J.; Kapatos, C.; Vaidyanathan, R. An extended complementary filter for full-body MARG orientation estimation. IEEE ASME Trans. Mechatron. 2020, 25, 2054–2064. [Google Scholar] [CrossRef]
- Texas Instruments: LM723. Available online: https://www.ti.com/product/LM723 (accessed on 28 August 2021).
- Analog Devices: LT1920. Available online: https://www.analog.com/en/products/lt1920.html (accessed on 28 August 2021).
- Texas Instruments: UA741. Available online: https://www.ti.com/product/UA741 (accessed on 28 August 2021).
- Social Science Statistics: Linear Regression Calculator. Available online: https://www.socscistatistics.com/tests/regression/default.aspx (accessed on 28 August 2021).
- Keras: The Sequential Model. Available online: https://keras.io/guides/sequential_model/ (accessed on 10 November 2021).
- Kaggle: Rectified Linear Units (ReLU) in Deep Learning. Available online: https://www.kaggle.com/dansbecker/rectified-linear-units-relu-in-deep-learning (accessed on 29 October 2021).
- Lecun, Y.; Bengio, Y.; Hinton, G. Deep learning. Nature 2015, 521, 436–444. [Google Scholar] [CrossRef] [PubMed]
- Kingma, D.P.; Ba, J. Adam: A Method for Stochastic Optimization. Available online: https://arxiv.org/abs/1412.6980 (accessed on 19 January 2022).
- Keras: RMSprop. Available online: https://keras.io/api/optimizers/rmsprop/ (accessed on 10 November 2021).
- Wan, B.; Gao, Y.; Wang, Y.; Zhang, X.; Li, H.; Shan, G. Hammer throw: A pilot study for a novel digital-route for diagnosing and improving its throw quality. Appl. Sci. 2020, 10, 1922. [Google Scholar] [CrossRef]
- Kabuye, E.; Hellebrekers, T.; Bobo, J.; Keeys, N.; Majidi, C.; Cagan, J.; Leduc, P. Tracking of Scalpel Motions with an Inertial Measurement Unit System. IEEE Sens. J. 2022, 22, 4651–4660. [Google Scholar] [CrossRef]
- Cataldo, A.; Member, S.; Benedetto, E.D.; Member, S.; Schiavoni, R.; Monti, G.; Member, S.; Tedesco, A.; Masciullo, A.; Piuzzi, E.; et al. Portable Microwave Reflectometry System for Skin Sensing. IEEE Trans. Instrum. Meas. 2022, 71, 4003308. [Google Scholar] [CrossRef]
- Luczak, T.; Burch, V.R.F.; Smith, B.K.; Carruth, D.W.; Lamberth, J.; Chander, H.; Knight, A.; Ball, J.E.; Prabhu, R.K. Closing the Wearable Gap—Part V: Development of a Pressure-Sensitive Sock Utilizing Soft Sensors. Sensors 2019, 20, 208. [Google Scholar] [CrossRef]
- Wang, Y.; Shao, T.; Jiang, P.; Shan, G.; Wang, L.; Li, G. A Pilot Study on a Multimodal Wearable System by Applying a Two-Chain Biomechanical Model in the Alpine Ski Slalom. In Proceedings of the IEEE International Conference on Real-Time Computing and Robotics, Xining, China, 15–19 July 2021; pp. 1082–1086. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Traditional Optoelectronic Systems | Computer-Vision Based Markerless Systems | Wearable Systems |
|---|---|---|
| Movement constraints caused by at least ~40 markers for a full-body motion capture | No movement constraints to athletes | Movement constraints caused by at least 17 wearable sensors for a full-body motion capture |
| Accuracy of the markers’ trajectories can be within 1 mm | Accuracy of the virtual markers can be in millimeter level | Accuracy of the sensors’ trajectories can be in centimeter level |
| Usually lab-based capturing | Usually within 5 m * 5 m’ capturing space but can be expanded with AI modeling | No limitations for the capturing space |
| Easy but complicated calibration work | Difficult and complicated calibration work | Easy and convenient calibration work |
| Time-consuming course on data processing | Real-time monitoring but requiring high-quality hardware and high-level AI modeling | Real-time monitoring |
| Features | Previous Study | Current Study | |
|---|---|---|---|
| Hardware | Microcontroller | Arduino Mega | Arduino Pro Mini |
| Wireless communication | XBee RF modules | XBee RF modules | |
| Sensors | Load cell & optical infrared sensor | Load cell & IMUs | |
| PCB design & 3D printing | No | Yes | |
| Physical size | 15.3 cm × 10.6 cm × 7.5 cm | 8.6 cm × 7.8 cm × 5.3 cm | |
| Battery capacity | 9 V batteries—about 500 mAh | AA batteries—about 2000 to 3000 mAh | |
| Software | Algorithm | N/A | Madgwick’s filter for IMU data fusion |
| AI module | N/A | Deep neural network models built offline |
| Hip | Knee | Ankle | |||||
|---|---|---|---|---|---|---|---|
| Left | Right | Left | Right | Left | Right | ||
| Model I | MAE | ~11° | ~12° | ~13° | ~14° | ~9° | ~11° |
| MSE | ~241° | ~255° | ~491° | ~557° | ~310° | ~439° | |
| Model II | MAE | ~4° | ~4° | ~4° | ~4° | ~5° | ~5° |
| MSE | ~37° | ~26° | ~26° | ~39° | ~41° | ~57° | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Y.; Shan, G.; Li, H.; Wang, L. A Wearable-Sensor System with AI Technology for Real-Time Biomechanical Feedback Training in Hammer Throw. Sensors 2023, 23, 425. https://doi.org/10.3390/s23010425
Wang Y, Shan G, Li H, Wang L. A Wearable-Sensor System with AI Technology for Real-Time Biomechanical Feedback Training in Hammer Throw. Sensors. 2023; 23(1):425. https://doi.org/10.3390/s23010425
Chicago/Turabian StyleWang, Ye, Gongbing Shan, Hua Li, and Lin Wang. 2023. "A Wearable-Sensor System with AI Technology for Real-Time Biomechanical Feedback Training in Hammer Throw" Sensors 23, no. 1: 425. https://doi.org/10.3390/s23010425
APA StyleWang, Y., Shan, G., Li, H., & Wang, L. (2023). A Wearable-Sensor System with AI Technology for Real-Time Biomechanical Feedback Training in Hammer Throw. Sensors, 23(1), 425. https://doi.org/10.3390/s23010425