


Design of Active Vibration Isolation Controller with Disturbance Observer-Based Linear Quadratic Regulator for Optical Reference Cavities
Abstract
1. Introduction
2. Problem and System Description
2.1. Vibration Requirements for Optical Reference Cavities
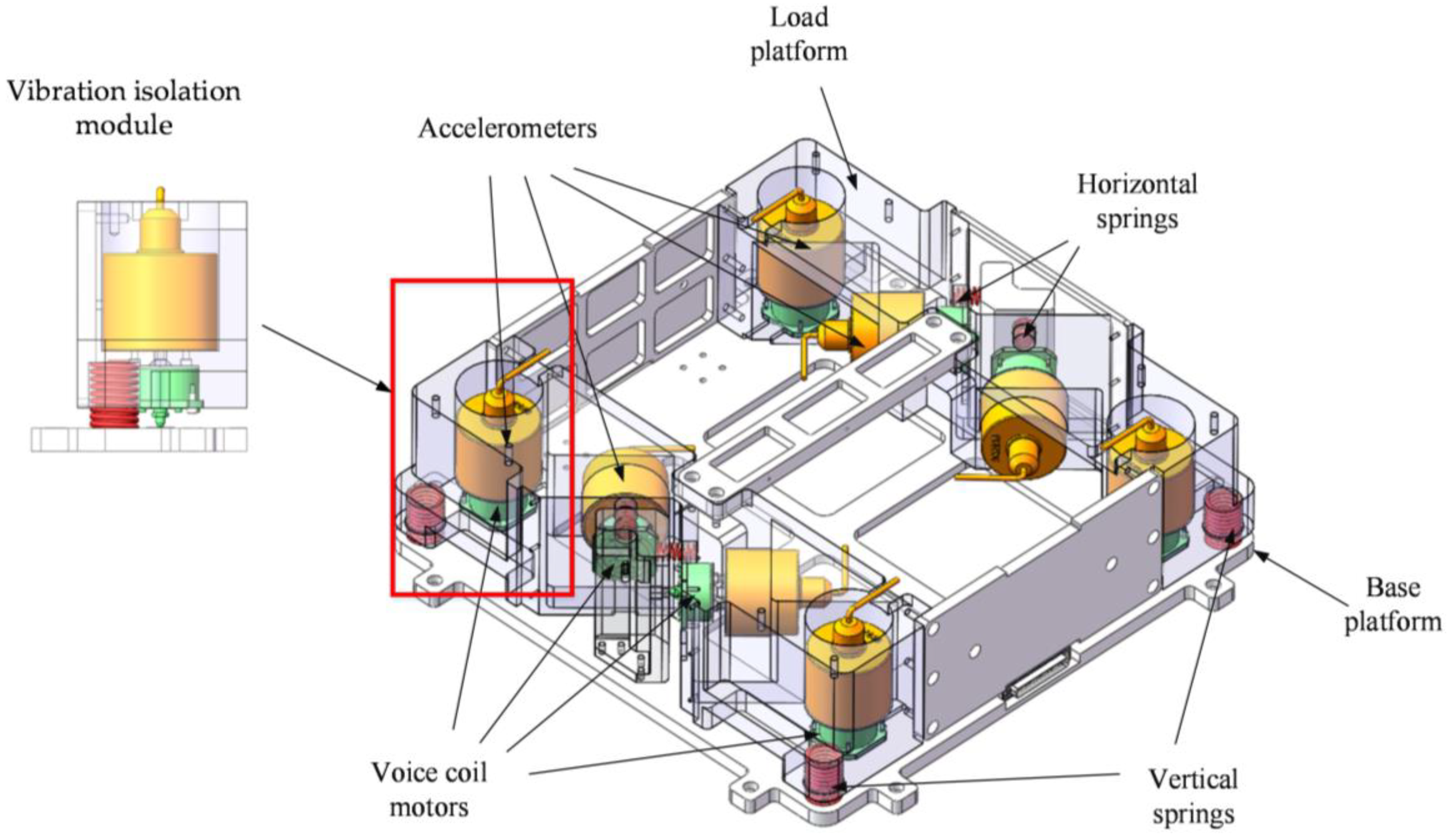
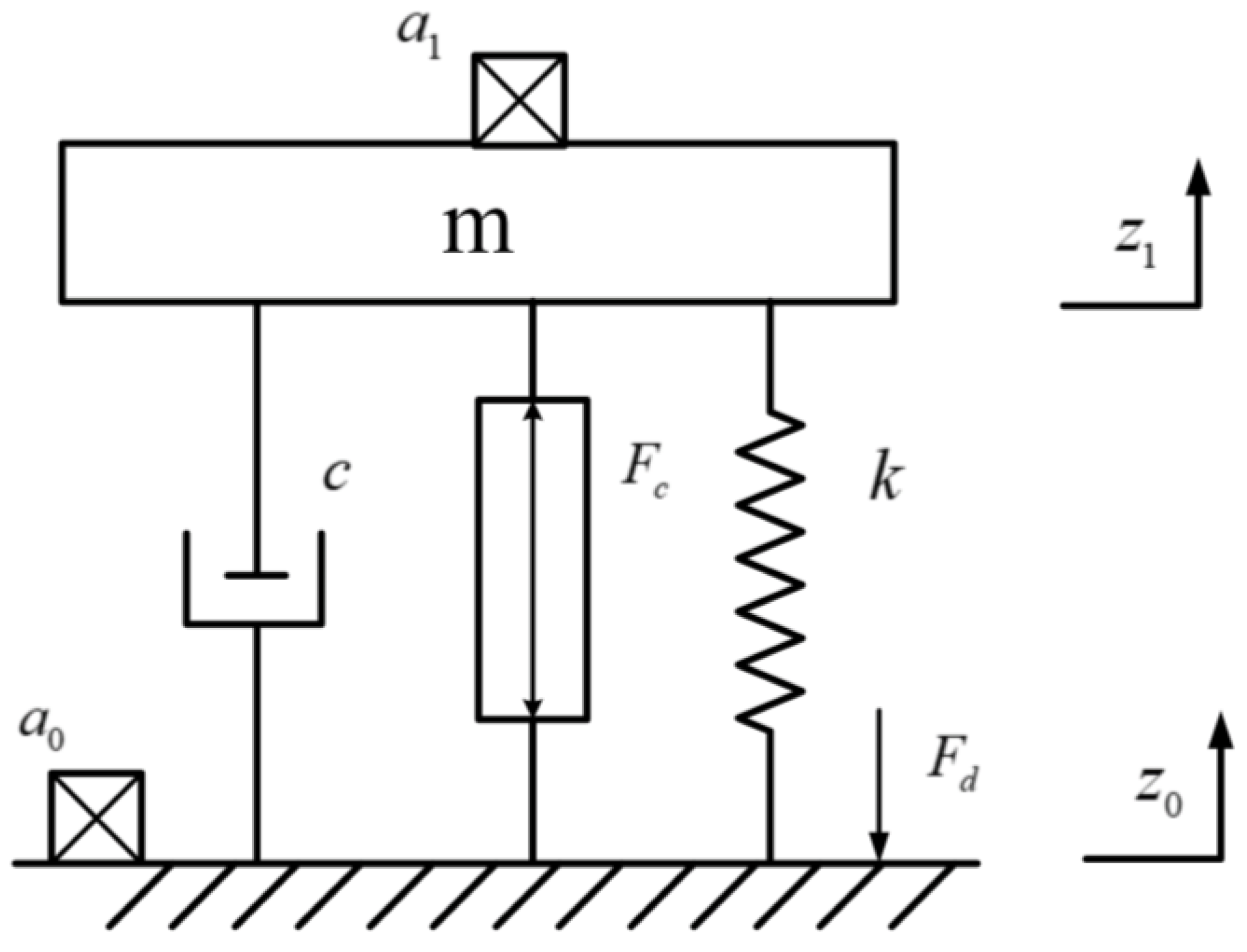
2.2. Description of Active Vibration Isolation System
3. Design of Controller
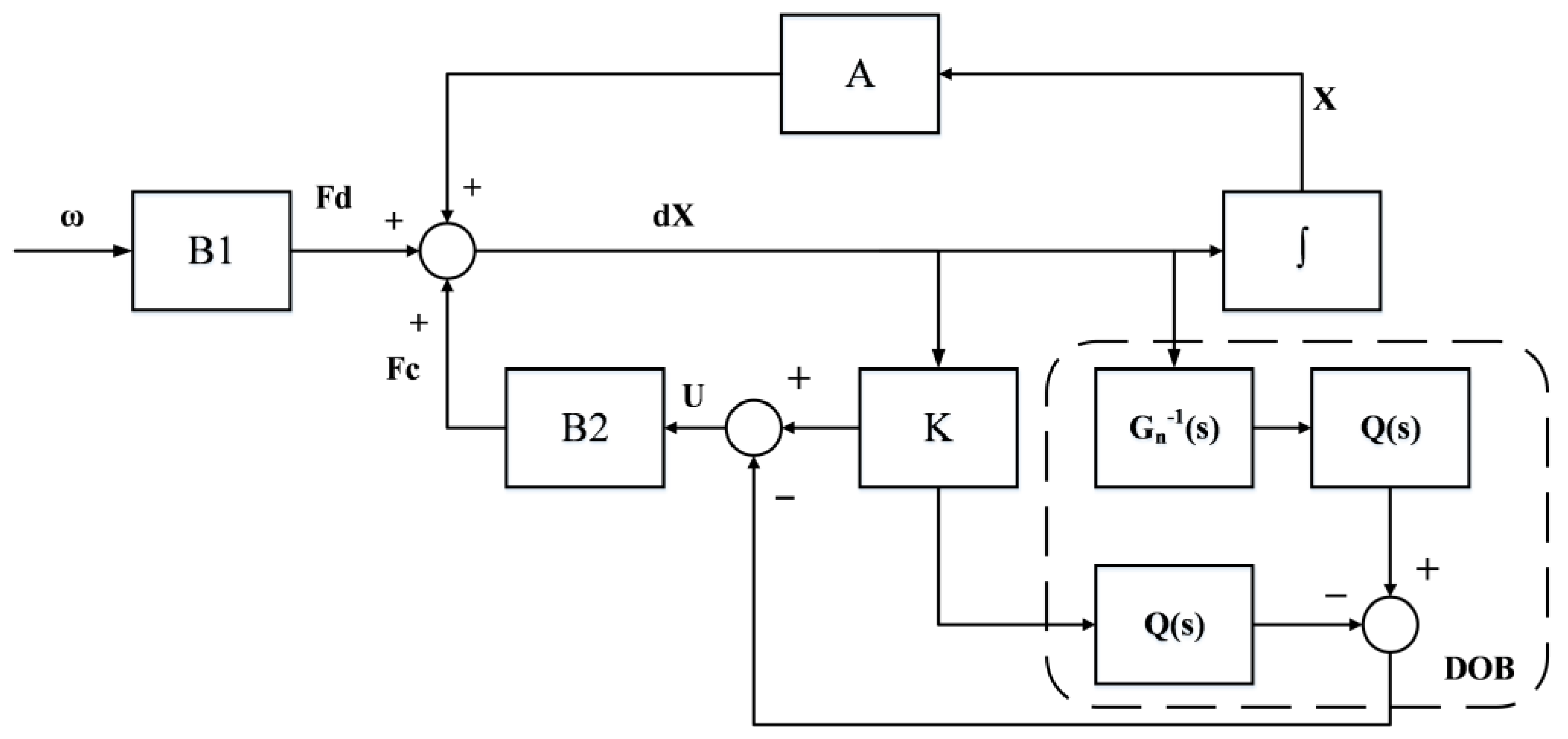
3.1. LQR State-Differential Controller
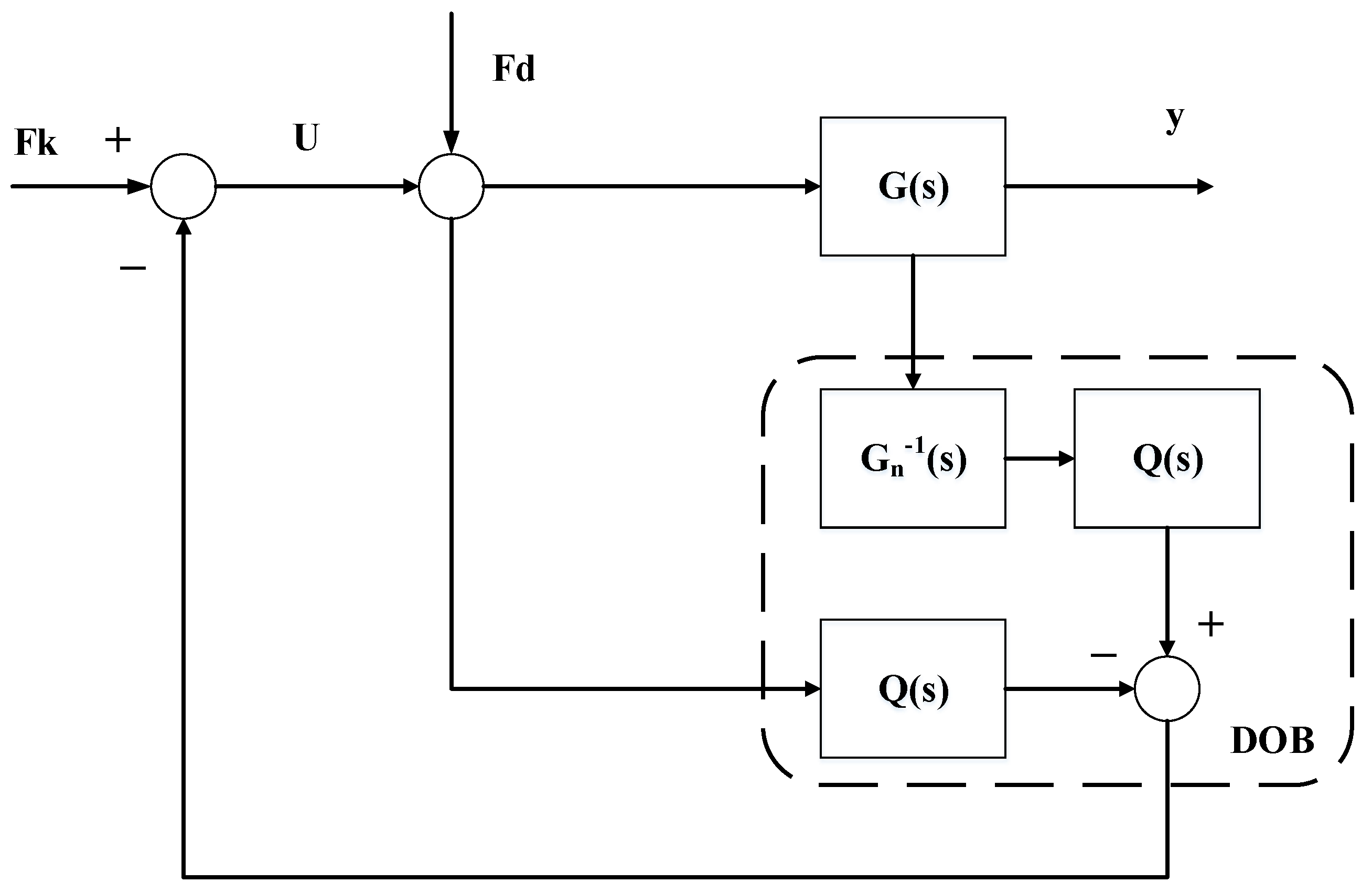
3.2. Disturbance Observer
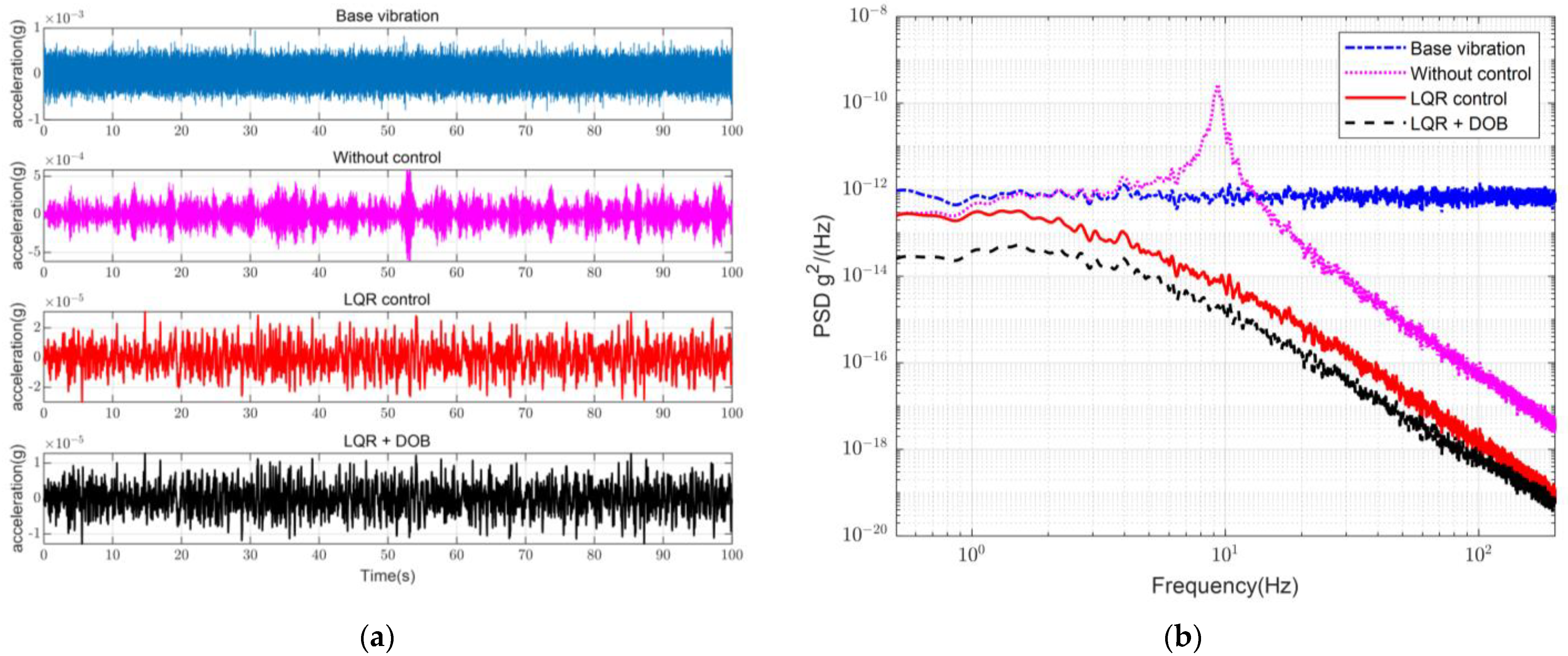
3.3. Simulation
4. Experimental Validation
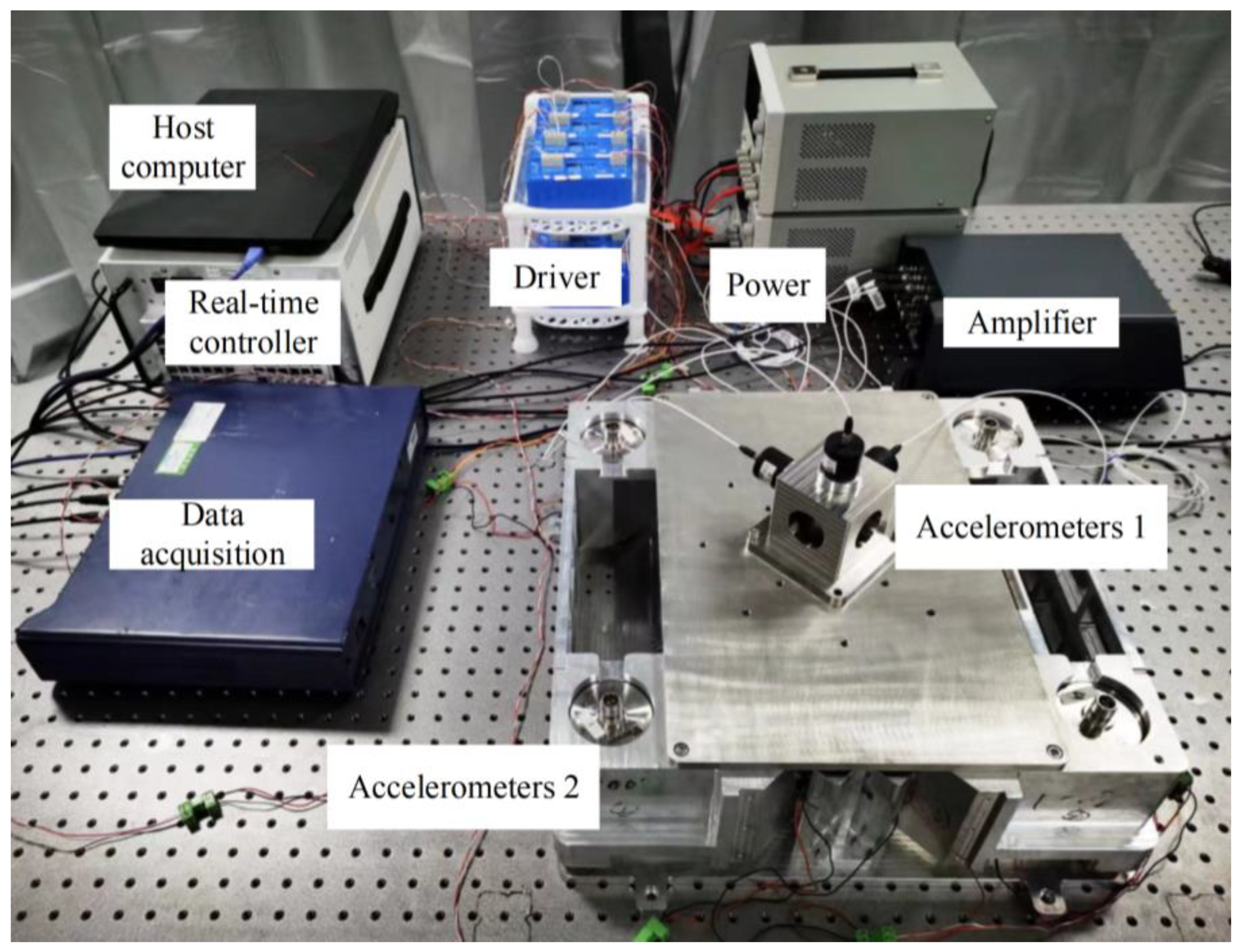
4.1. Experimental System
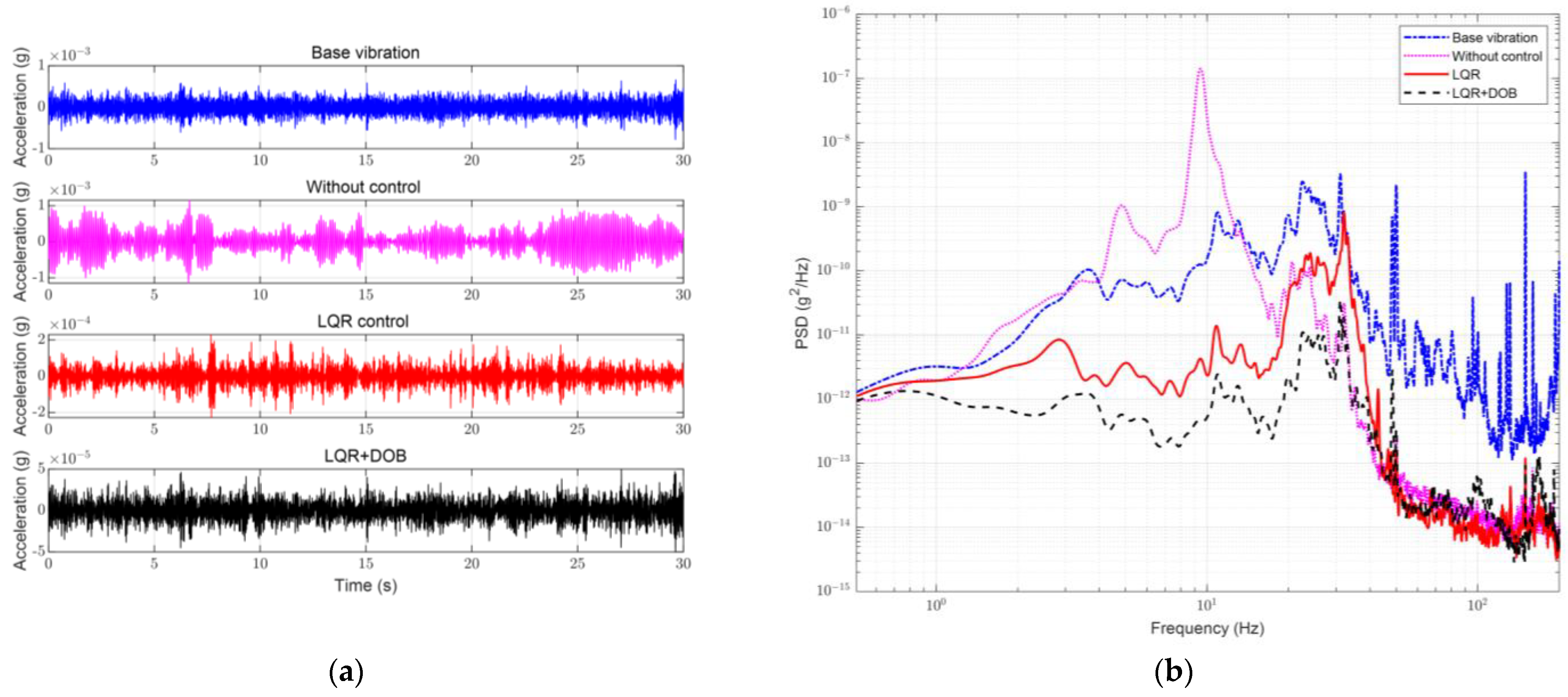
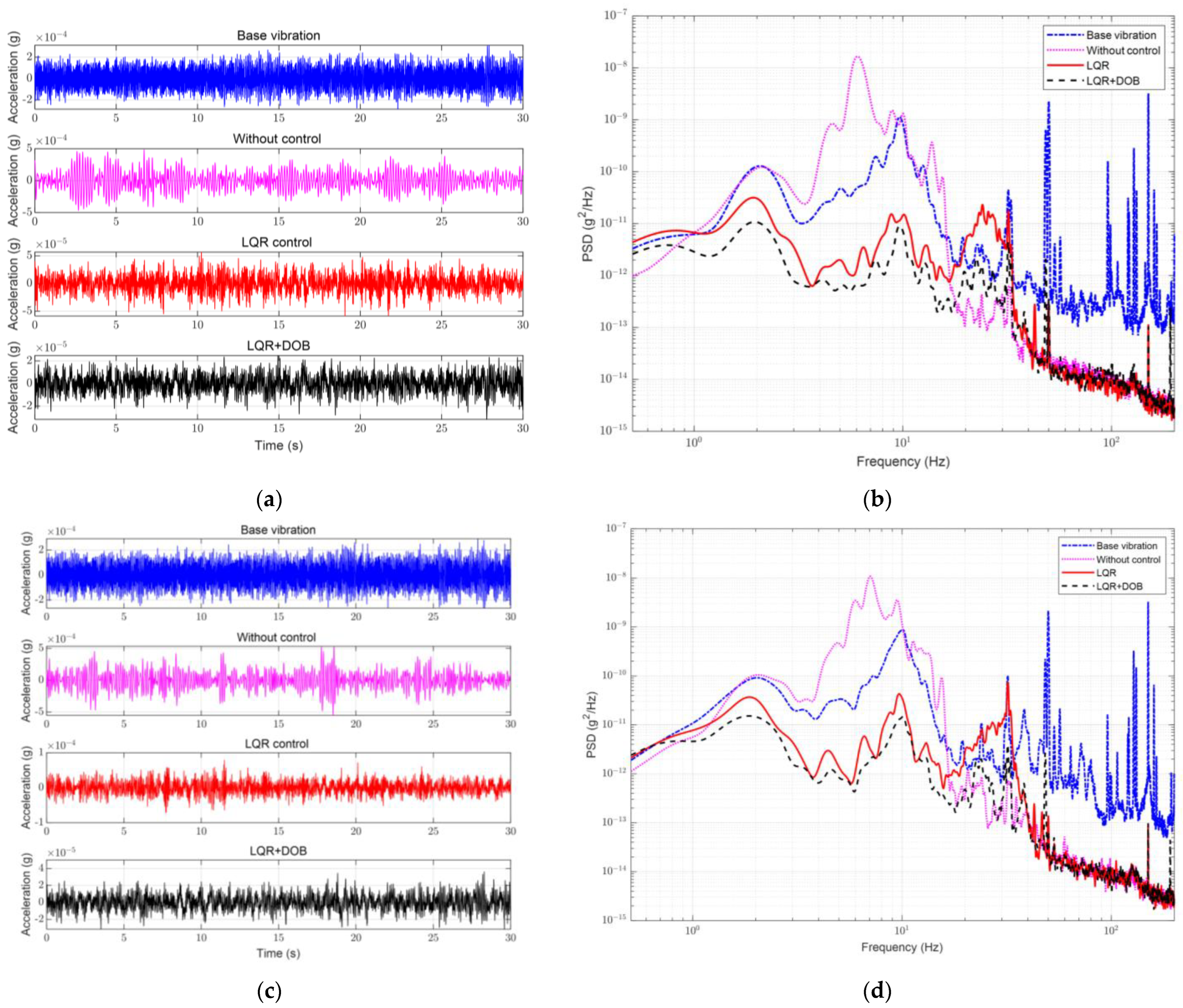
4.2. Analysis of Experimental Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Loh, W.; Stuart, J.; Reens, D.; Bruzewicz, C.D.; Braje, D.; Chiaverini, J.; Juodawlkis, P.W.; Sage, J.M.; McConnell, R. Operation of an optical atomic clock with a Brillouin laser subsystem. Nature 2020, 588, 244–249. [Google Scholar] [CrossRef] [PubMed]
- Nazarova, T.; Riehle, F.; Sterr, U. Vibration-insensitive reference cavity for an ultra-narrow-linewidth laser. Appl. Phys. B 2006, 83, 531–536. [Google Scholar] [CrossRef]
- Matichard, F.; Lantz, B.; Mittleman, R.; Mason, K.; Kissel, J.; Abbott, B.; Biscans, S.; McIver, J.; Abbott, R.; Abbott, S.; et al. Seismic isolation of Advanced LIGO: Review of strategy, instrumentation and performance. Class. Quantum Gravity 2015, 32, 185003. [Google Scholar] [CrossRef]
- Gong, W.; Li, A.; Huang, C.; Che, H.; Feng, C.; Qin, F. Effects and Prospects of the Vibration Isolation Methods for an Atomic Interference Gravimeter. Sensors 2022, 22, 583. [Google Scholar] [CrossRef] [PubMed]
- Kim, C.; Jung, J.; Youm, W.; Park, K. Design of mechanical components for vibration reduction in an atomic force microscope. Rev. Sci. Instrum. 2011, 82, 035102. [Google Scholar] [CrossRef]
- Ito, S.; Unger, S.; Schitter, G. Vibration isolator carrying atomic force microscope’s head. Mechatronics 2017, 44, 32–41. [Google Scholar] [CrossRef]
- Hyde, T.T.; Davis, L.P. Vibration reduction for commercial optical intersatellite communication links. In Proceedings of the SPIE Conference on Smart Structures and Integrated Systems, San Diego, CA, USA, 2–5 March 1998; pp. 94–105. [Google Scholar]
- Kuschnerov, M.; Piyawanno, K.; Alfiad, M.S.; Spinnler, B.; Napoli, A.; Lankl, B. Impact of Mechanical Vibrations on Laser Stability and Carrier Phase Estimation in Coherent Receivers. IEEE Photonics Technol. Lett. 2010, 22, 1114–1116. [Google Scholar] [CrossRef]
- Liu, L.; Wang, B. Development of stewart platforms for active vibration isolation and precision pointing. In Proceedings of the International Conference on Smart Materials and Nanotechnology in Engineering, Harbin, China, 1–4 July 2007. [Google Scholar]
- Zhou, W.; Li, D. Experimental research on a vibration isolation platform for momentum wheel assembly. J. Sound Vib. 2013, 332, 1157–1171. [Google Scholar] [CrossRef]
- Zhang, L.; Wang, W.; Shi, Y. Development of a Magnetorheological Damper of the Micro-vibration Using Fuzzy PID Algorithm. Arab. J. Sci. Eng. 2018, 44, 2763–2773. [Google Scholar] [CrossRef]
- Li, L.; Wang, L.; Yuan, L.; Zheng, R.; Wu, Y.; Sui, J.; Zhong, J. Micro-vibration suppression methods and key technologies for high-precision space optical instruments. Acta Astronaut. 2021, 180, 417–428. [Google Scholar] [CrossRef]
- He, K.; Li, Q.; Liu, L.; Yang, H. Active vibration isolation of ultra-stable optical reference cavity of space optical clock. Aerosp. Sci. Technol. 2021, 112, 106633. [Google Scholar] [CrossRef]
- Zhang, Y.; Guo, Z.; He, H.; Zhang, J.; Liu, M.; Zhou, Z. A novel vibration isolation system for reaction wheel on space telescopes. Acta Astronaut. 2014, 102, 1–13. [Google Scholar] [CrossRef]
- Kamesh, D.; Pandiyan, R.; Ghosal, A. Modeling, design and analysis of low frequency platform for attenuating micro-vibration in spacecraft. J. Sound Vib. 2010, 329, 3431–3450. [Google Scholar] [CrossRef]
- Kamesh, D.; Pandiyan, R.; Ghosal, A. Passive vibration isolation of reaction wheel disturbances using a low frequency flexible space platform. J. Sound Vib. 2012, 331, 1310–1330. [Google Scholar] [CrossRef]
- Unsal, M.; Niezrecki, C.; Crane, C.D. Multi-axis Semi-active Vibration Control using Magnetorheological Technology. J. Intell. Mater. Syst. Struct. 2008, 19, 1463–1470. [Google Scholar] [CrossRef]
- Xu, J.; Yang, X.; Li, W.; Zheng, J.; Wang, Y.; Fan, M. Research on semi-active vibration isolation system based on electromagnetic spring. Mech. Ind. 2020, 21, 101. [Google Scholar] [CrossRef]
- Xing, J.T.; Xiong, Y.P.; Price, W.G. Passive–active vibration isolation systems to produce zero or infinite dynamic modulus: Theoretical and conceptual design strategies. J. Sound Vib. 2005, 286, 615–636. [Google Scholar] [CrossRef]
- Liu, C.; Jing, X.; Daley, S.; Li, F. Recent advances in micro-vibration isolation. Mech. Syst. Signal Process. 2015, 56–57, 55–80. [Google Scholar] [CrossRef]
- Wang, M.; Li, X.; Chen, X. Active Hybrid Control Algorithm with Sky-Hook Damping and Lead-Lag Phase Compensation for Multi-DOFs Ultra-Low Frequency Active Vibration Isolation System. Shock. Vib. 2017, 2017, 1861809. [Google Scholar] [CrossRef]
- Wu, Q.; Liu, B.; Cui, N.; Zhao, S. Tracking Control of a Maglev Vibration Isolation System Based on a High-Precision Relative Position and Attitude Model. Sensors 2019, 19, 3375. [Google Scholar] [CrossRef]
- Beijen, M.A.; Heertjes, M.F.; Van Dijk, J.; Hakvoort, W.B.J. Self-tuning MIMO disturbance feedforward control for active hard-mounted vibration isolators. Control. Eng. Pract. 2018, 72, 90–103. [Google Scholar] [CrossRef]
- Hu, Y.; Chen, C.; Wu, H.; Song, C. Study on structural optimization design and cascade PID control of maglev actuator for active vibration isolation system. J. Vib. Control. 2017, 24, 1829–1847. [Google Scholar] [CrossRef]
- Jiang, D.; Li, J.; Li, X.; Deng, C.; Liu, P. Modeling identification and control of a 6-DOF active vibration isolation system driving by voice coil motors with a Halbach array magnet. J. Mech. Sci. Technol. 2020, 34, 617–630. [Google Scholar] [CrossRef]
- Guo, Q.; Liu, G.; Xiang, B.; Liu, H.; Wen, T. The disturbance rejection of magnetically suspended inertially stabilized platform. Trans. Inst. Meas. Control. 2016, 40, 565–577. [Google Scholar] [CrossRef]
- Thompson, W.E.; Hilkert, J.M.; McManamon, P.F.; Pautler, B. A reduced-order disturbance observer applied to inertially stabilized line-of-sight control. In Proceedings of the Acquisition, Tracking, Pointing, and Laser Systems Technologies XXV, Orlando, FL, USA, 25–26 April 2011. [Google Scholar]
- Webster, S.A.; Oxborrow, M.; Gill, P. Vibration insensitive optical cavity. Phys. Rev. A 2007, 75, 011801. [Google Scholar] [CrossRef]
- Cheinet, P.; Canuel, B.; Pereira Dos Santos, F.; Gauguet, A.; Yver-Leduc, F.; Landragin, A. Measurement of the Sensitivity Function in a Time-Domain Atomic Interferometer. IEEE Trans. Instrum. Meas. 2008, 57, 1141–1148. [Google Scholar] [CrossRef]
- Webster, S.; Gill, P. Force-insensitive optical cavity. Opt. Lett. 2011, 36, 3572–3574. [Google Scholar] [CrossRef] [PubMed]
- Qian, Y.; Xie, Y.; Jia, J.; Zhang, L. Development of Active Microvibration Isolation System for Precision Space Payload. Appl. Sci. 2022, 12, 4548. [Google Scholar] [CrossRef]
- Sever, M.; Şendur, H.S.; Yazıcı, H.; Arslan, M.S. Biodinamik sürücü modeli içeren bir taşıt süspansiyon sisteminin durum türevi geri beslemeli LQR ile aktif titreşim kontrolü. Gazi Üniversitesi Mühendislik-Mimar. Fakültesi Derg. 2019, 34, 1573–1584. [Google Scholar] [CrossRef]
- Boyd, S.; Ghaoui, L.E.; Feron, E.; Balakrishnan, V. Linear Matrix Inequalities in System & Control Theory (Studies in Applied Mathematics); SIAM: Philadelphia, PA, USA, 1994; Volume 15. [Google Scholar]
- Shim, H.; Jo, N.H. An almost necessary and sufficient condition for robust stability of closed-loop systems with disturbance observer. Automatica 2009, 45, 296–299. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Unit |
|---|---|---|
| Mass | 25 | Kg |
| Stiffness | 88,000 | N/m |
| Damping | 17.6 | Ns/m |
| Resonant frequency | 10.12 | Hz |
| Resonant frequency | 6.38 | Hz |
| Resonant frequency | 6.71 | Hz |
| Sensor sensitivity | 1000 | V/g |
| Gain of VCM | 1.2 | N/A |
| Gain of Driver | 0.2 | A/V |
| Direction | Base Vibration (g) | LQR Control (g) | LQR + DOB (g) |
|---|---|---|---|
| Z | 1.46 × 10−4 | 4.61 × 10−5 | 1.17 × 10−5 |
| X | 7.88 × 10−5 | 1.48 × 10−5 | 7.16 × 10−6 |
| Y | 7.75 × 10−5 | 1.70 × 10−5 | 8.76 × 10−6 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qian, Y.; Xie, Y.; Jia, J.; Zhang, L. Design of Active Vibration Isolation Controller with Disturbance Observer-Based Linear Quadratic Regulator for Optical Reference Cavities. Sensors 2023, 23, 302. https://doi.org/10.3390/s23010302
Qian Y, Xie Y, Jia J, Zhang L. Design of Active Vibration Isolation Controller with Disturbance Observer-Based Linear Quadratic Regulator for Optical Reference Cavities. Sensors. 2023; 23(1):302. https://doi.org/10.3390/s23010302
Chicago/Turabian StyleQian, Yuchen, Yong Xie, Jianjun Jia, and Liang Zhang. 2023. "Design of Active Vibration Isolation Controller with Disturbance Observer-Based Linear Quadratic Regulator for Optical Reference Cavities" Sensors 23, no. 1: 302. https://doi.org/10.3390/s23010302
APA StyleQian, Y., Xie, Y., Jia, J., & Zhang, L. (2023). Design of Active Vibration Isolation Controller with Disturbance Observer-Based Linear Quadratic Regulator for Optical Reference Cavities. Sensors, 23(1), 302. https://doi.org/10.3390/s23010302