
Digital Twin for a Collaborative Painting Robot

 ,
,  and
and 
Abstract
1. Introduction
- Development and experimental performance evaluation of a collaborative painting robot using a digital twin framework.
- The digital twin of the automatic painting robot simulates the entire process and estimates the paint result before the real execution. This results in decreased set costs, waste, and time, with improved results.
2. Materials and Methods
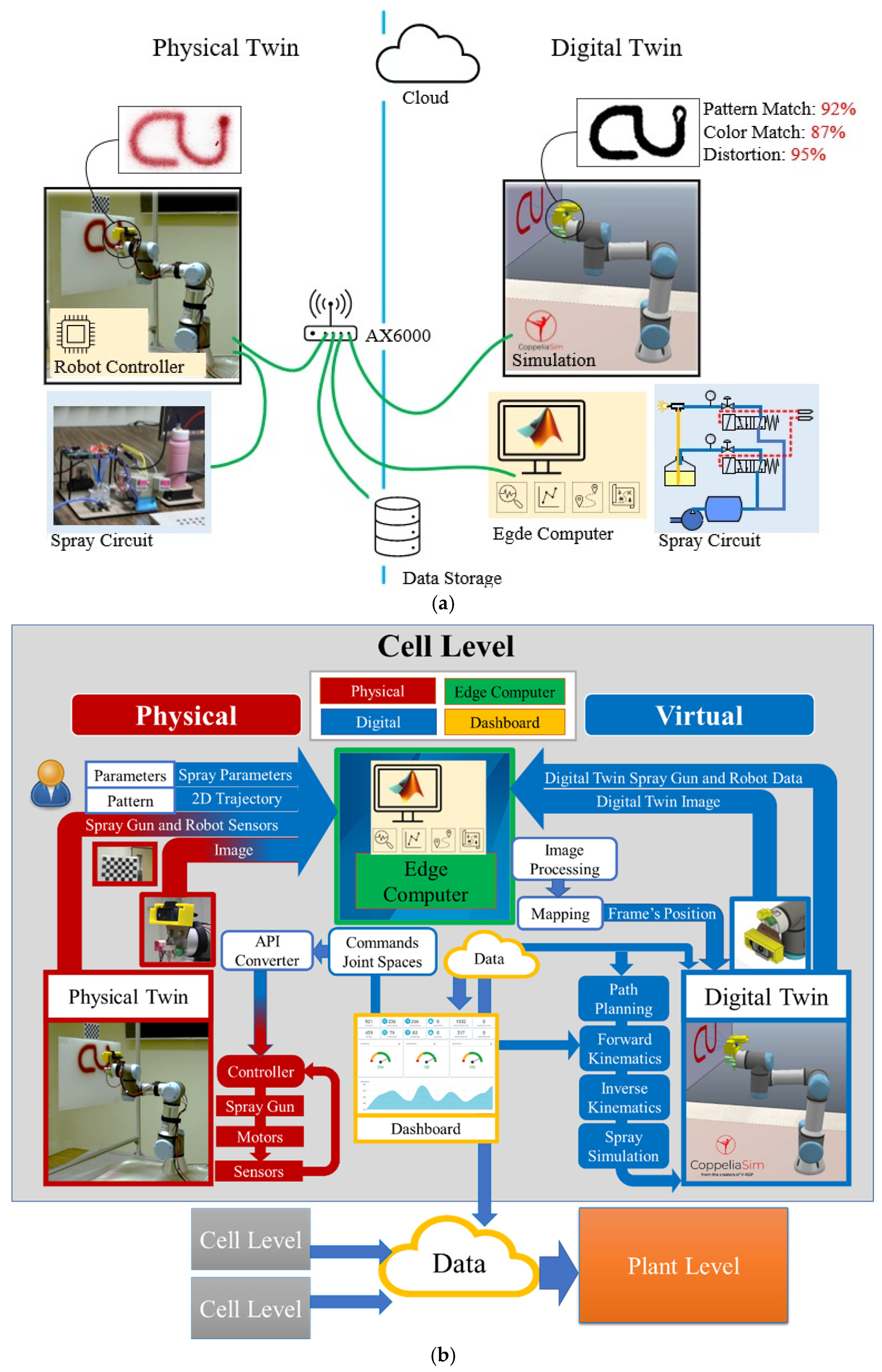
2.1. Digital Twin Architecture for Collaborative Painting Robot
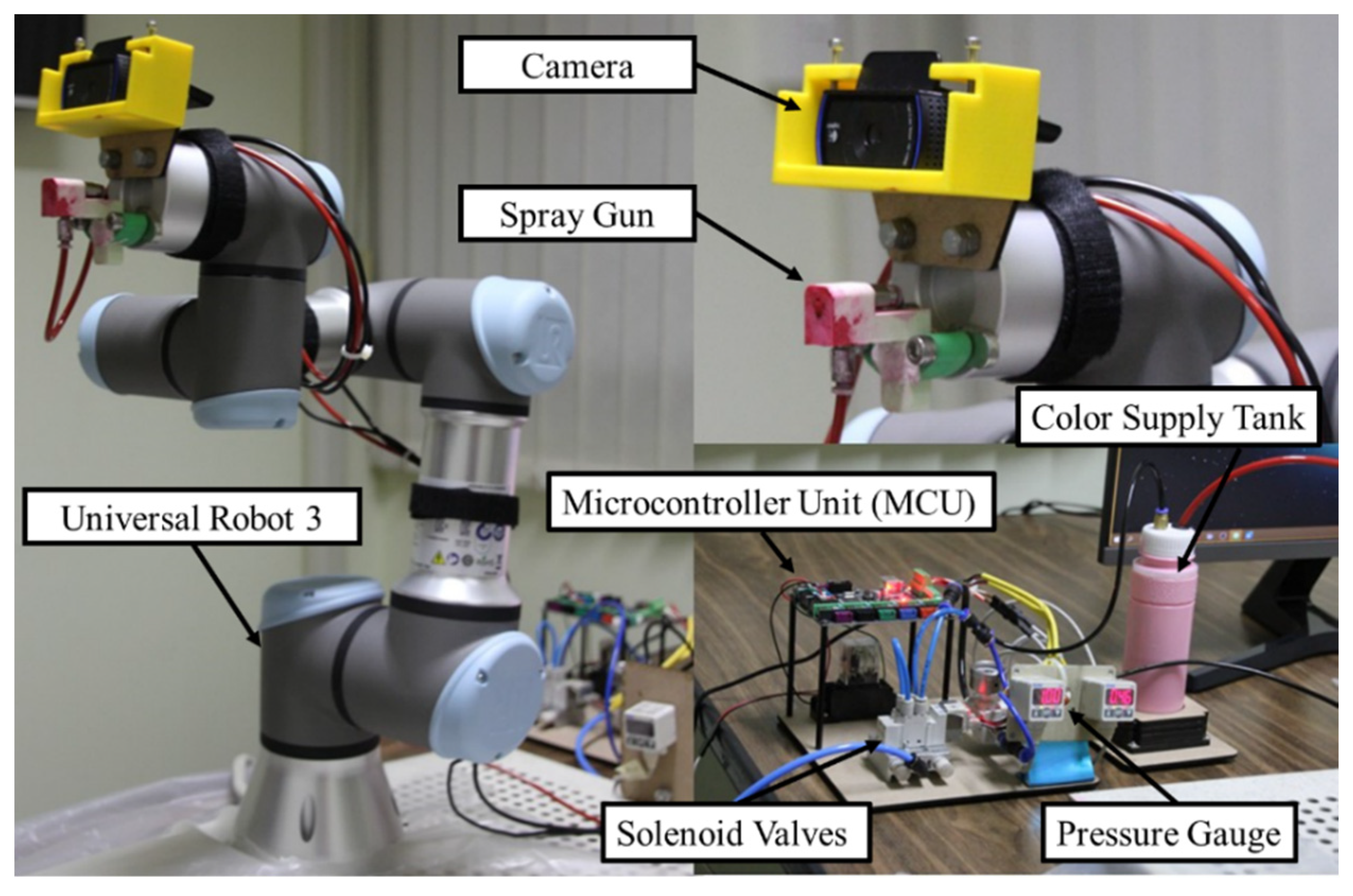
2.2. Collaborative Painting Robot System Hardware and Components
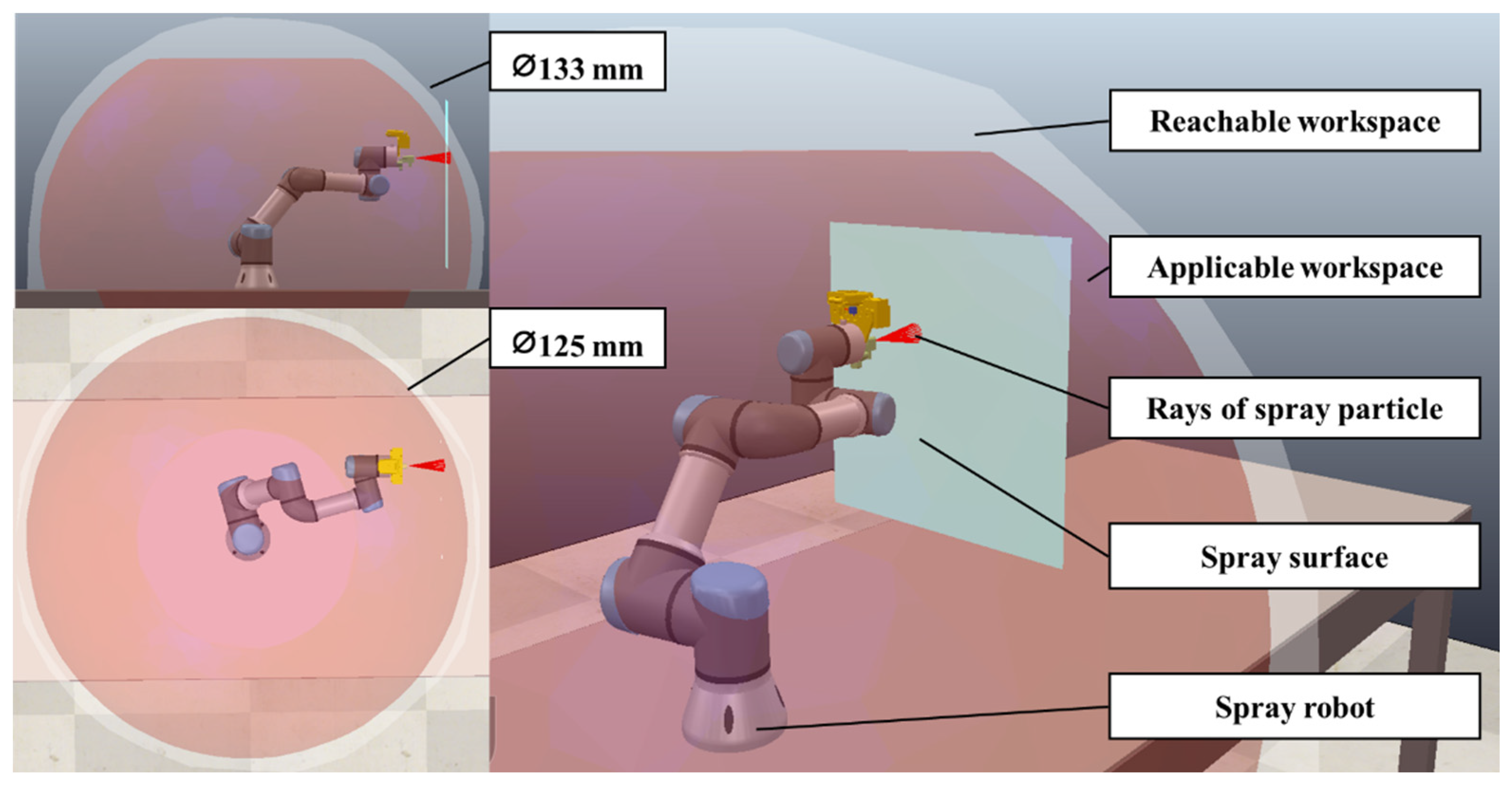
2.2.1. Collaborative Painting Robot
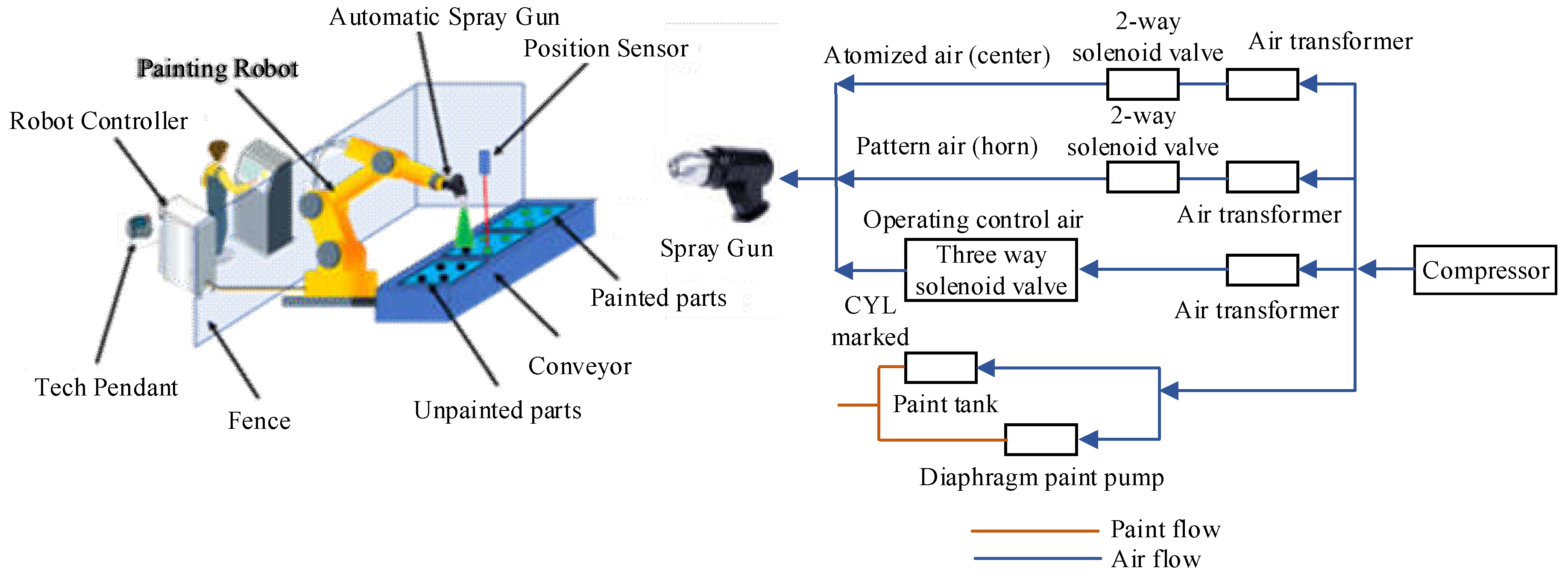
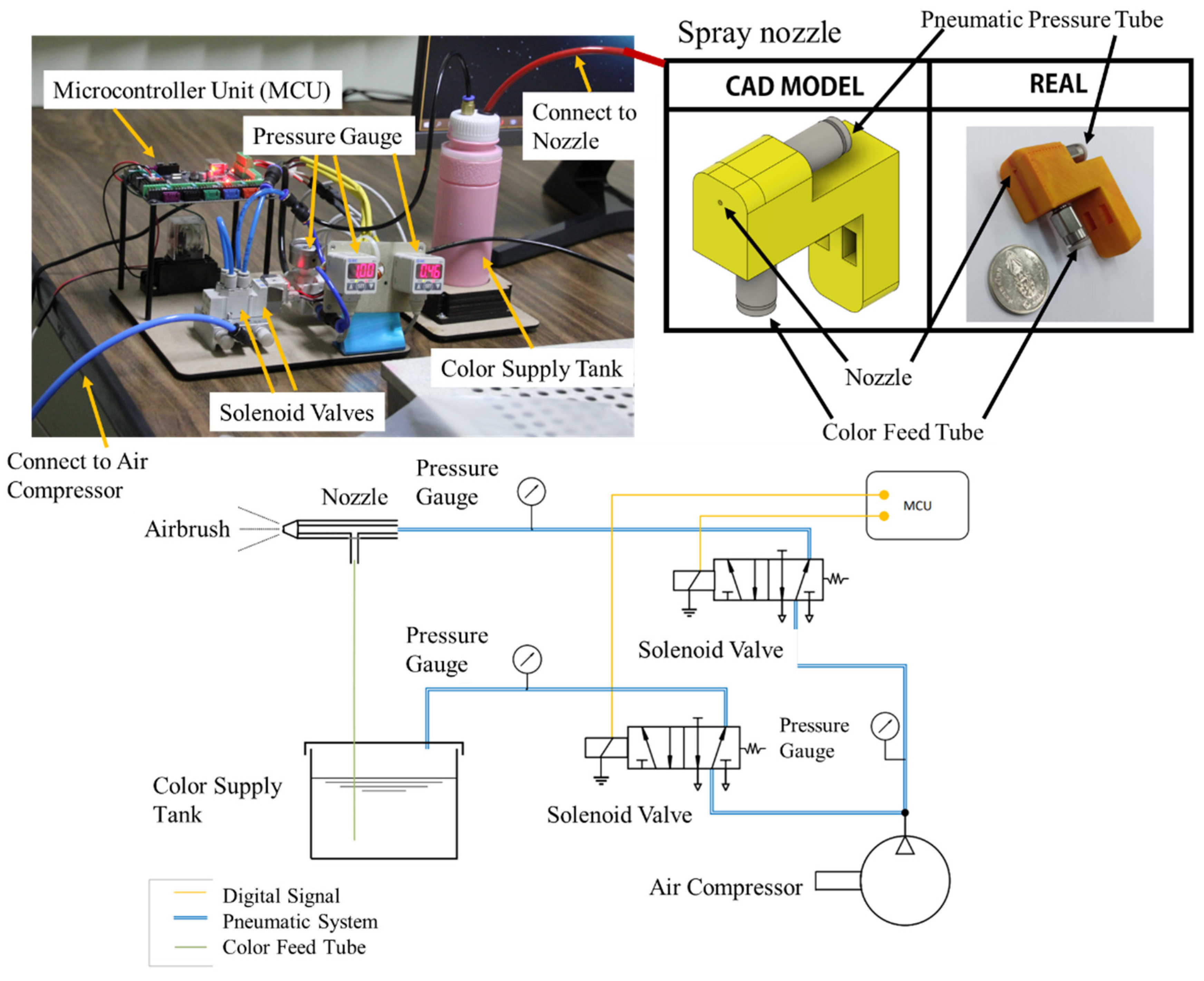
2.2.2. Spray Gun
2.2.3. Sensor Camera
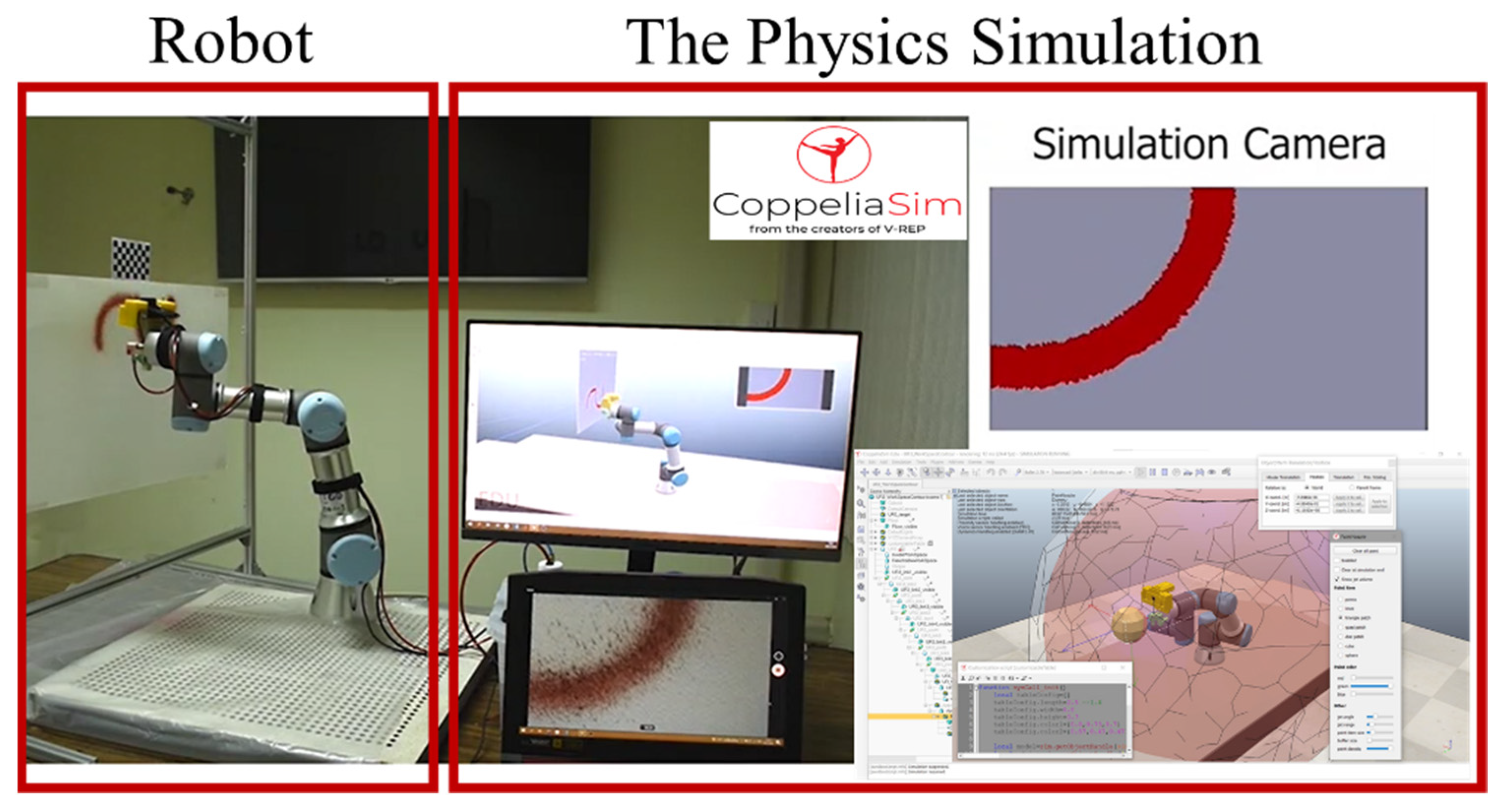
2.2.4. Virtual System
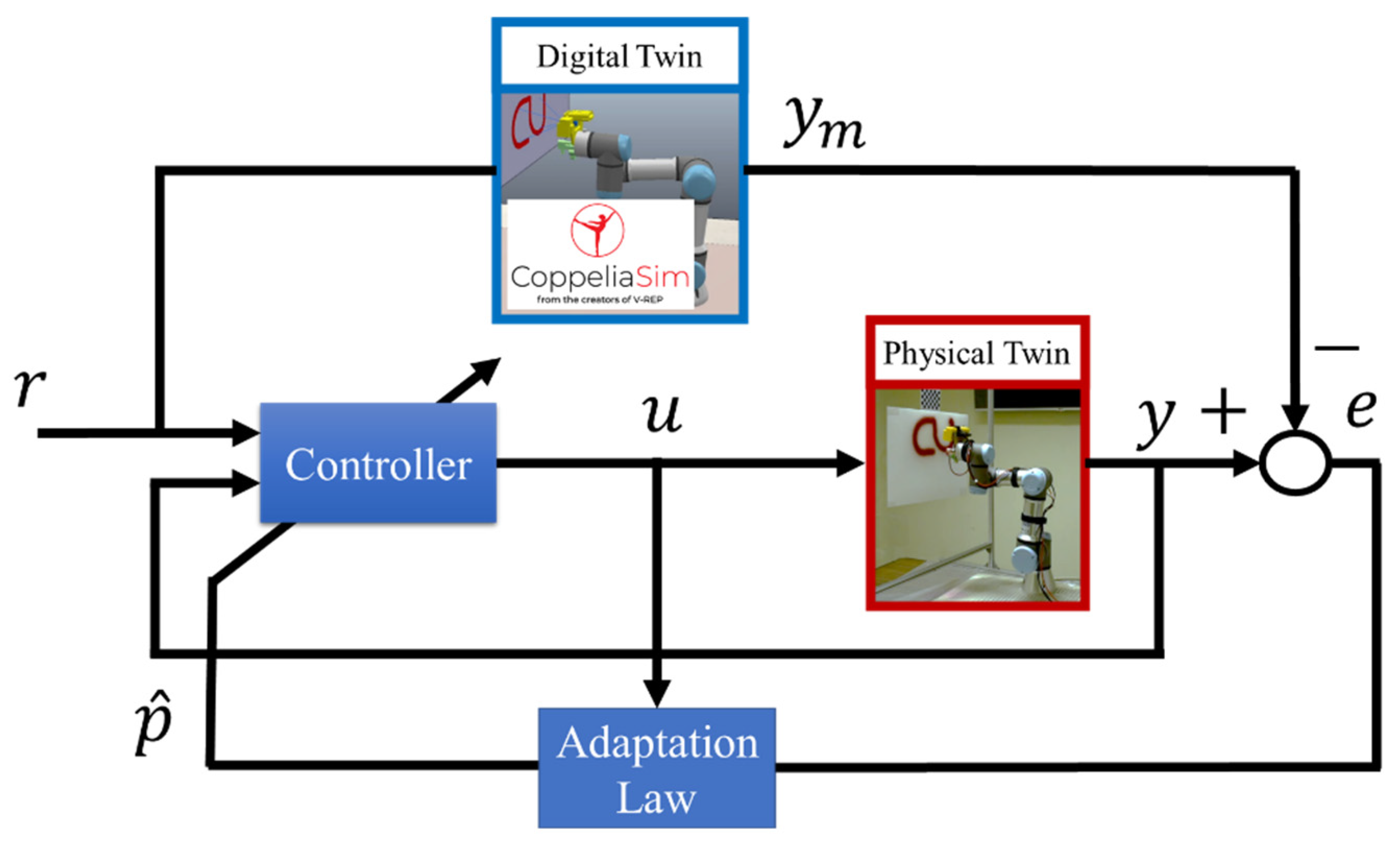
2.2.5. Control Modules
3. Experiments and Results
3.1. Painting Case Study and Experiments
3.2. Results
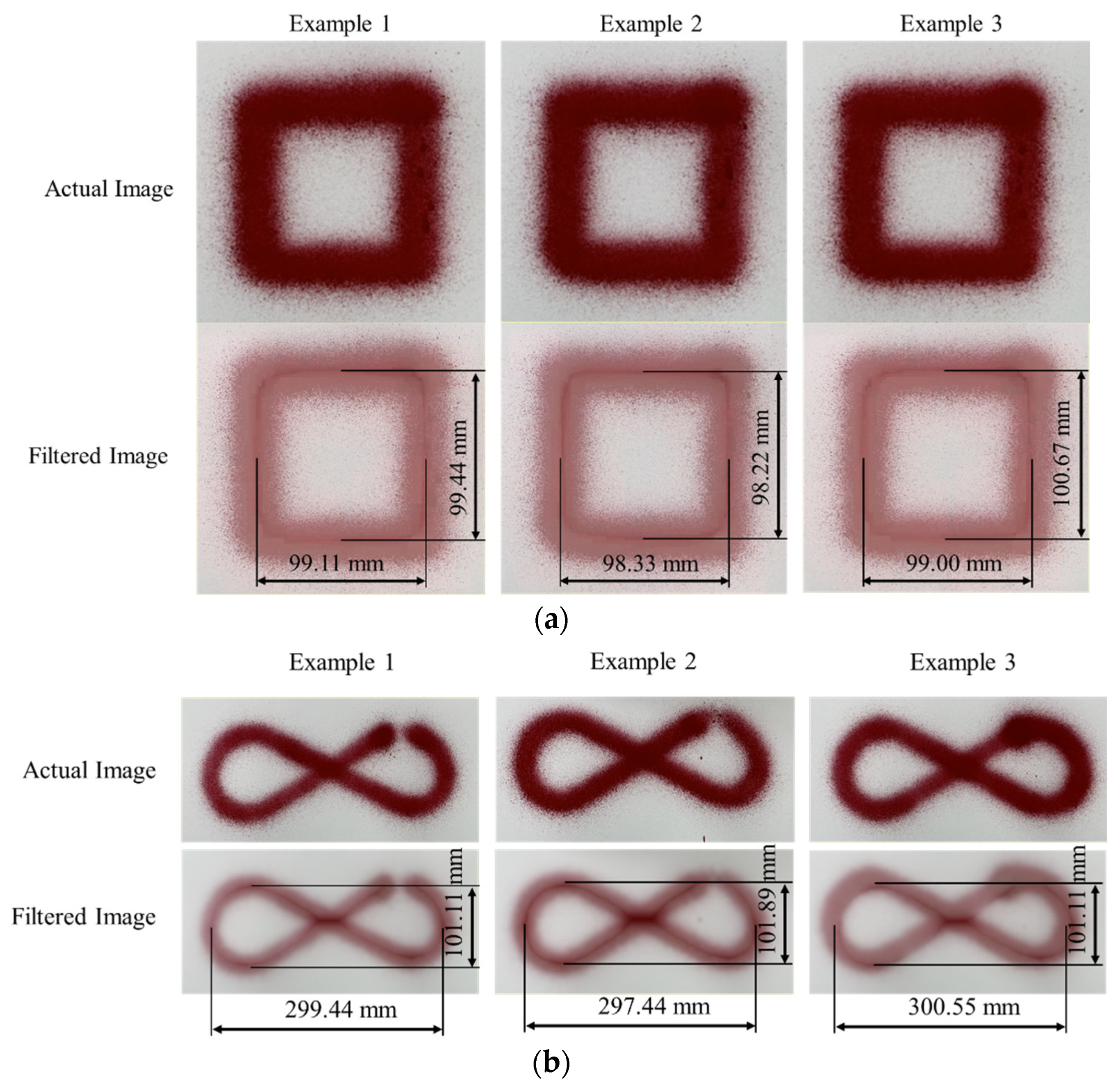
3.3. First and Second Pattern Results
3.4. Third Pattern Results
4. Discussion and Future Recommendations
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Matulis, M.; Harvey, C. A robot arm digital twin utilising reinforcement learning. Comput. Graph. 2021, 95, 106–114. [Google Scholar] [CrossRef]
- Pérez, L.; Rodríguez-Jiménez, S.; Rodríguez, N.; Usamentiaga, R.; García, D.F. Digital Twin and Virtual Reality Based Methodology for Multi-Robot Manufacturing Cell Commissioning. Appl. Sci. 2020, 10, 3633. [Google Scholar] [CrossRef]
- Kousi, N.; Gkournelos, C.; Aivaliotis, S.; Giannoulis, S.; Michalos, G.; Makris, S. Digital twin for adaptation of robots’ behavior in flexible robotic assembly lines. Procedia Manuf. 2019, 28, 121–126. [Google Scholar] [CrossRef]
- Liu, M.; Fang, S.; Dong, H.; Xu, C. Review of digital twin about concepts, technologies, and industrial applications. J. Manuf. Syst. 2021, 58, 346–361. [Google Scholar] [CrossRef]
- Kritzinger, W.; Karner, M.; Traar, G.; Henjes, J.; Sihn, W. Digital Twin in manufacturing: A categorical literature review and classification. IFAC-PapersOnLine 2018, 51, 1016–1022. [Google Scholar] [CrossRef]
- Boschert, S.; Rosen, R. Digital twin—The simulation aspect. In Mechatronic Futures; Hehenberger, P., Bradley, D., Eds.; Springer: Cham, Switzerland, 2016; pp. 59–74. [Google Scholar]
- Hernández, L.A.; Hernandez, S. Application of digital 3D models on urban planning and highway design. Trans. Built Environ. 1997, 30, 391–402. [Google Scholar]
- Barricelli, B.R.; Casiraghi, E.; Fogli, D. A Survey on Digital Twin: Definitions, Characteristics, Applications, and Design Implications. IEEE Access 2019, 7, 167653–167671. [Google Scholar] [CrossRef]
- Kiritsis, D.; Bufardi, A.; Xirouchakis, P. Research issues on product lifecycle management and information tracking using smart embedded systems. Adv. Eng. Inf. 2003, 17, 189–202. [Google Scholar] [CrossRef]
- Terzi, S.; Bouras, A.; Dutta, D.; Garetti, M.; Kiritsis, D. Product lifecycle management from its history to its new role. Int. J. Prod. Lifecycle Manag. 2010, 4, 360–389. [Google Scholar] [CrossRef]
- Garetti, M.; Rosa, P.; Terzi, S. Life Cycle Simulation for the design of Product–Service Systems. Comput. Ind. 2012, 63, 361–369. [Google Scholar] [CrossRef]
- Vaccari, M.; Bacci di Capaci, R.; Brunazzi, E.; Tognotti, L.; Pierno, P.; Vagheggi, R.; Pannocchia, G. Optimally managing chemical plant operations: An example oriented by Industry 4.0 paradigms. Ind. Eng. Chem. Res. 2021, 60, 7853–7867. [Google Scholar] [CrossRef]
- Badii, C.; Bellini, P.; Cenni, D.; Mitolo, N.; Nesi, P.; Pantaleo, G.; Soderi, M. Industry 4.0 synoptics controlled by IoT applications in Node-RED. In Proceedings of the 2020 International Conferences on Internet of Things (iThings) and IEEE Green Computing and Communications (GreenCom) and IEEE Cyber, Physical and Social Computing (CPSCom) and IEEE Smart Data (SmartData) and IEEE Congress on Cybermatics (Cybermatics), Rhodes, Greece, 2–6 November 2020; pp. 54–61. [Google Scholar]
- Hsu, T.C.; Tsai, Y.H.; Chang, D.M. The Vision-Based Data Reader in IoT System for Smart Factory. Appl. Sci. 2022, 12, 6586. [Google Scholar] [CrossRef]
- Zhang, B.; Wu, J.; Wang, L.; Yu, Z. Accurate dynamic modeling and control parameters design of an industrial hybrid spray-painting robot. Robot. Comput.-Integr. Manuf. 2020, 63, 101923. [Google Scholar] [CrossRef]
- Wu, J.; Gao, Y.; Zhang, B.; Wang, L. Workspace and dynamic performance evaluation of the parallel manipulators in a spray-painting equipment. Robot. Com.-Int. Manuf. 2017, 44, 199–207. [Google Scholar] [CrossRef]
- Chen, W.; Zhao, D. Path Planning for Spray Painting Robot of Workpiece Surfaces. Math. Probl. Eng. 2013, 2013, 659457. [Google Scholar] [CrossRef]
- Pandey, S.V.; Ganapuram, S.; Raval, P.; Gajjar, A.; Singh, A.K.; Thaker, J. A Review on Electrical and Mechanical Technologies Used in Spray Painting Robots. In Advances in Interdisciplinary Engineering; Springer: Singapore, 2021; pp. 539–546. [Google Scholar]
- From, P.J.; Gunnar, J.; Gravdahl, J.T. Optimal Paint Gun Orientation in Spray Paint Applications—Experimental Results. IEEE Trans. Autom. Sci. Eng. 2011, 8, 438–442. [Google Scholar] [CrossRef]
- Atkar, P.N.; Choset, H.; Rizzi, A.A. Toward optimal coverage of 2-dimensional surfaces embedded in r3: Choice of start curve. In Proceedings of the 2003 IEEE/RSJ International Conference on Intelligent Robots and Systems, Las Vegas, NV, USA, 27–31 October 2003; pp. 3581–3587. [Google Scholar]
- Chen, W.; Li, X.; Ge, H.; Wang, L.; Zhang, Y. Trajectory Planning for Spray Painting Robot Based on Point Cloud Slicing Technique. Electronics 2020, 9, 908. [Google Scholar] [CrossRef]
- Sheng, W.; Chen, H.; Xi, N.; Chen, Y. Tool path planning for compound surfaces in spray forming processes. IEEE Trans. Autom. Sci. Eng. 2005, 2, 240–249. [Google Scholar] [CrossRef]
- Conner, D.C.; Greenfield, A.; Atkar, P.N.; Rizzi, A.A.; Choset, H. Paint deposition modeling for trajectory planning on automotive surfaces. IEEE Trans. Autom. Sci. Eng. 2005, 2, 381–391. [Google Scholar] [CrossRef]
- Atkar, P.N.; Greenfield, A.; Conner, D.C.; Choset, H.; Rizzi, A.A. Uniform coverage of automotive surface patches. Int. J. Robot. Res. 2005, 24, 883–898. [Google Scholar] [CrossRef]
- Dumlu, A.; Erenturk, K. Trajectory tracking control for a 3-DOF parallel manipulator using fractional-order PIλDμ control. IEEE Trans. Ind. Electron. 2014, 61, 3417–3426. [Google Scholar] [CrossRef]
- Sun, T.; Liang, D.; Song, Y. Singular-perturbation-based nonlinear hybrid control ofredundant parallel robot. IEEE Trans. Ind. Electron. 2017, 65, 3326–3336. [Google Scholar] [CrossRef]
- Makarov, M.; Grossard, M.; Rodríguez-Ayerbe, P.; Dumur, D. Modeling and preview H∞ control design for motion control of elastic-joint robots with uncertainties. IEEE Trans. Ind. Electron. 2016, 63, 6429–6438. [Google Scholar] [CrossRef]
- Xiao, B.; Yin, S.; Kaynak, O. Tracking control of robotic manipulators with uncertain kinematics and dynamics. IEEE Trans. Ind. Electron. 2016, 63, 6439–6449. [Google Scholar] [CrossRef]
- Li, S.; Harnefors, L.; Iwasaki, M. Modeling, analysis, and advanced control in motion control systems—Part III. IEEE Trans. Ind. Electron. 2017, 64, 3268–3272. [Google Scholar]
- Yang, C.; Jiang, Y.; He, W.; Na, J.; Li, Z.; Xu, B. Adaptive parameter estimation and control design for robot manipulators with finite-time convergence. IEEE Trans. Ind. Electron. 2018, 65, 8112–8123. [Google Scholar] [CrossRef]
- Wu, K.; Krewet, C.; Kuhlenkötter, B. Dynamic performance of industrial robot in corner path with CNC controller. Robot. Comput.-Int. Manuf. 2018, 54, 156–161. [Google Scholar] [CrossRef]
- Bahloul, A.; Tliba, S.; Chitour, Y. Dynamic parameters identification of an industrial robot with and without payload. IFAC-PapersOnLine 2018, 51, 443–448. [Google Scholar] [CrossRef]
- Kivelä, T.; Mattila, J.; Puura, J. A generic method to optimize a redundant serial robotic manipulator’s structure. Autom. Constr. 2017, 81, 172–179. [Google Scholar] [CrossRef]
- Chen, X.; Zhang, Q.; Sun, Y. Non-kinematic calibration of industrial robots using a rigid–flexible coupling error model and a full pose measurement method. Robot. Comput.-Int. Manuf. 2019, 57, 46–58. [Google Scholar] [CrossRef]
- Kapsalas, C.N.; Sakellariou, J.S.; Koustoumpardis, P.N.; Aspragathos, N.A. An ARX-based method for the vibration control of flexible beams manipulated by industrial robots. Robot. Comput.-Int. Manuf. 2018, 52, 76–91. [Google Scholar] [CrossRef]
- Bogaerts, B.; Sels, S.; Vanlanduit, S.; Penne, R. Connecting the CoppeliaSim robotics simulator to virtual reality. SoftwareX 2020, 11, 100426. [Google Scholar] [CrossRef]
- Rooban, S.; Suraj, S.D.; Vali, S.B.; Dhanush, N. CoppeliaSim: Adaptable modular robot and its different locomotions simulation framework. Mater. Today Proc. 2021. [Google Scholar] [CrossRef]
- Chakraborty, S.; Aithal, P.S. A Custom Robotic ARM in CoppeliaSim. Int. J. Appl. Eng. Manag. Lett. 2021, 5, 38–50. [Google Scholar] [CrossRef]
- Chakraborty, S.; Aithal, P.S. An Inverse Kinematics Demonstration of a Custom Robot using C# and CoppeliaSim. Int. J. Case Stud. Bus. IT Educ. 2021, 5, 78–87. [Google Scholar]
- The MathWorks Inc. Matlab. Available online: https://www.mathworks.com (accessed on 23 April 2022).
- Lv, Q.; Zhang, R.; Sun, X.; Lu, Y.; Bao, J. A digital twin-driven human-robot collaborative assembly approach in the wake of COVID-19. J. Manuf. Syst. 2021, 60, 837–851. [Google Scholar] [CrossRef]
- Kousi, N.; Gkournelos, C.; Aivaliotis, S.; Lotsaris, K.; Bavelos, A.C.; Baris, P.; Michalos, G.; Makris, S. Digital Twin for Designing and Reconfiguring Human–Robot Collaborative Assembly Lines. Appl. Sci. 2021, 11, 4620. [Google Scholar] [CrossRef]
- Schreiber, L.T.; Gosselin, C. Determination of the Inverse Kinematics Branches of Solution Based on Joint Coordinates for Universal Robots-Like Serial Robot Architecture. J. Mech. Robot. 2022, 14, 3. [Google Scholar] [CrossRef]
- Oh, S.J. Emergence of a new sector via a business ecosystem: A case study of Universal Robots and the collaborative robotics sector. Technol. Anal. Strateg. Manag. 2021, 1–14. [Google Scholar] [CrossRef]
- Universal Robots, UR. Available online: https://www.universal-robots.com (accessed on 26 April 2022).
- Logitech. Logitech C922. Available online: https://www.logitech.com (accessed on 26 April 2022).
- MVTec Software GmbH. 2021 Solution Guide II-B Matching Halcon 20.11 Steady. Available online: https://www.mvtec.com (accessed on 26 April 2022).












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| RMSE (Pixels) | Square Shape | Infinity Symbol | ||
|---|---|---|---|---|
| Vertical | Horizontal | Vertical | Horizontal | |
| Mean of RMSE (mm) | 1.01 | 1.15 | 1.50 | 1.49 |
| Standard Deviation of RMSE (mm) | 0.63 | 0.35 | 0.67 | 0.84 |
| Maximum RMSE (mm) | 1.78 | 1.67 | 2.22 | 2.56 |
| Square Shape | Infinity Symbol | |||||
|---|---|---|---|---|---|---|
| Red Channel | Green Channel | Blue Channel | Red Channel | Green Channel | Blue Channel | |
| Average Color Intensity | 85.78 | 5.82 | 2.26 | 85.35 | 5.67 | 1.32 |
| Standard Deviation of Average Color Intensity | 3.83 | 3.58 | 3.22 | 3.23 | 3.19 | 1.25 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chancharoen, R.; Chaiprabha, K.; Wuttisittikulkij, L.; Asdornwised, W.; Saadi, M.; Phanomchoeng, G. Digital Twin for a Collaborative Painting Robot. Sensors 2023, 23, 17. https://doi.org/10.3390/s23010017
Chancharoen R, Chaiprabha K, Wuttisittikulkij L, Asdornwised W, Saadi M, Phanomchoeng G. Digital Twin for a Collaborative Painting Robot. Sensors. 2023; 23(1):17. https://doi.org/10.3390/s23010017
Chicago/Turabian StyleChancharoen, Ratchatin, Kantawatchr Chaiprabha, Lunchakorn Wuttisittikulkij, Widhyakorn Asdornwised, Muhammad Saadi, and Gridsada Phanomchoeng. 2023. "Digital Twin for a Collaborative Painting Robot" Sensors 23, no. 1: 17. https://doi.org/10.3390/s23010017
APA StyleChancharoen, R., Chaiprabha, K., Wuttisittikulkij, L., Asdornwised, W., Saadi, M., & Phanomchoeng, G. (2023). Digital Twin for a Collaborative Painting Robot. Sensors, 23(1), 17. https://doi.org/10.3390/s23010017