
Quantitative Evaluation System of Wrist Motor Function for Stroke Patients Based on Force Feedback

Abstract
:1. Introduction
2. Materials and Methods
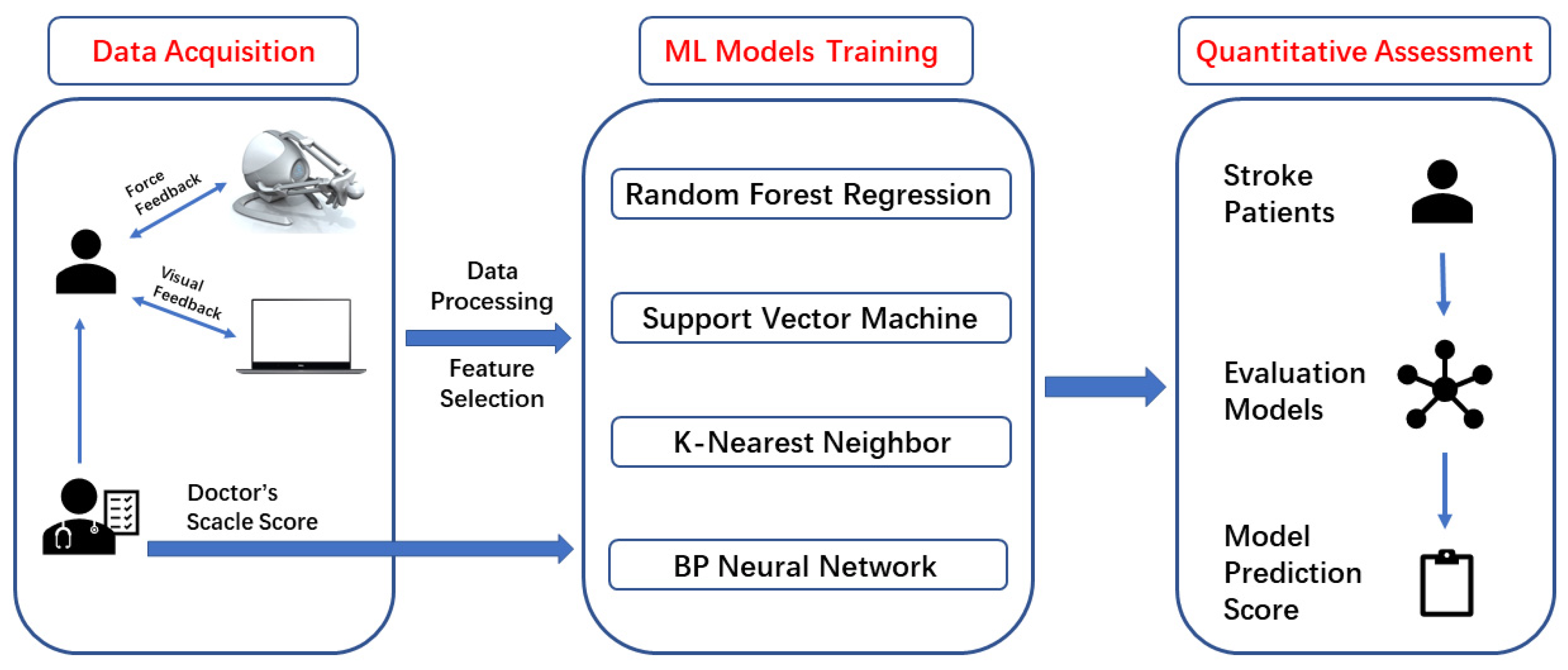
2.1. System Framework
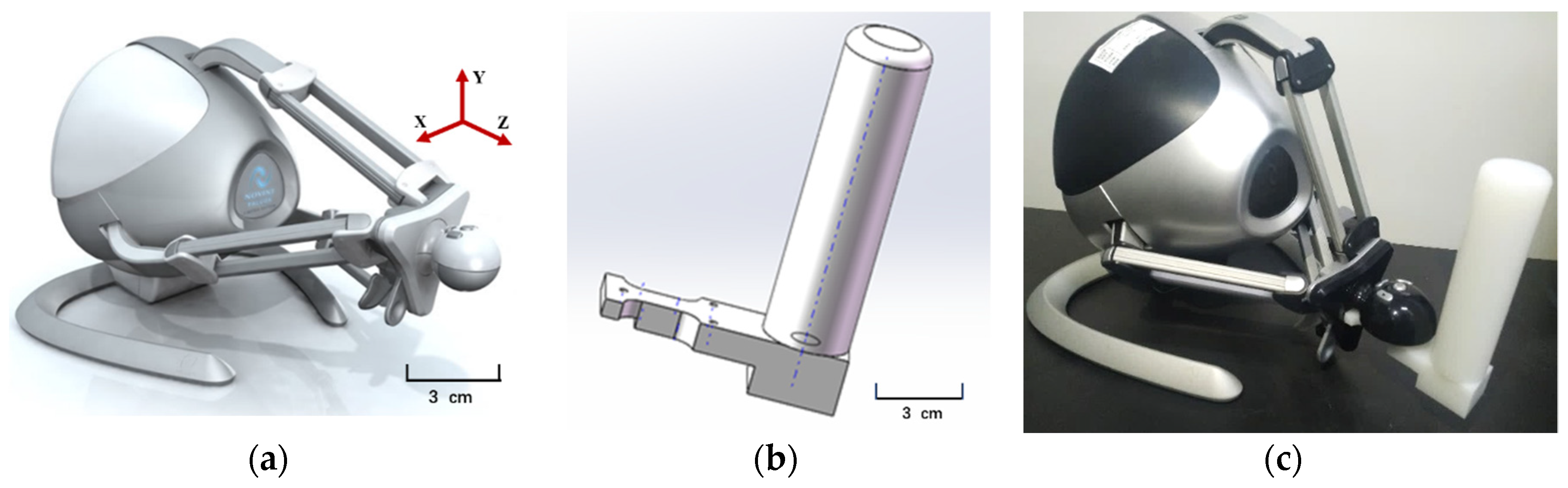
2.2. Experimental Device
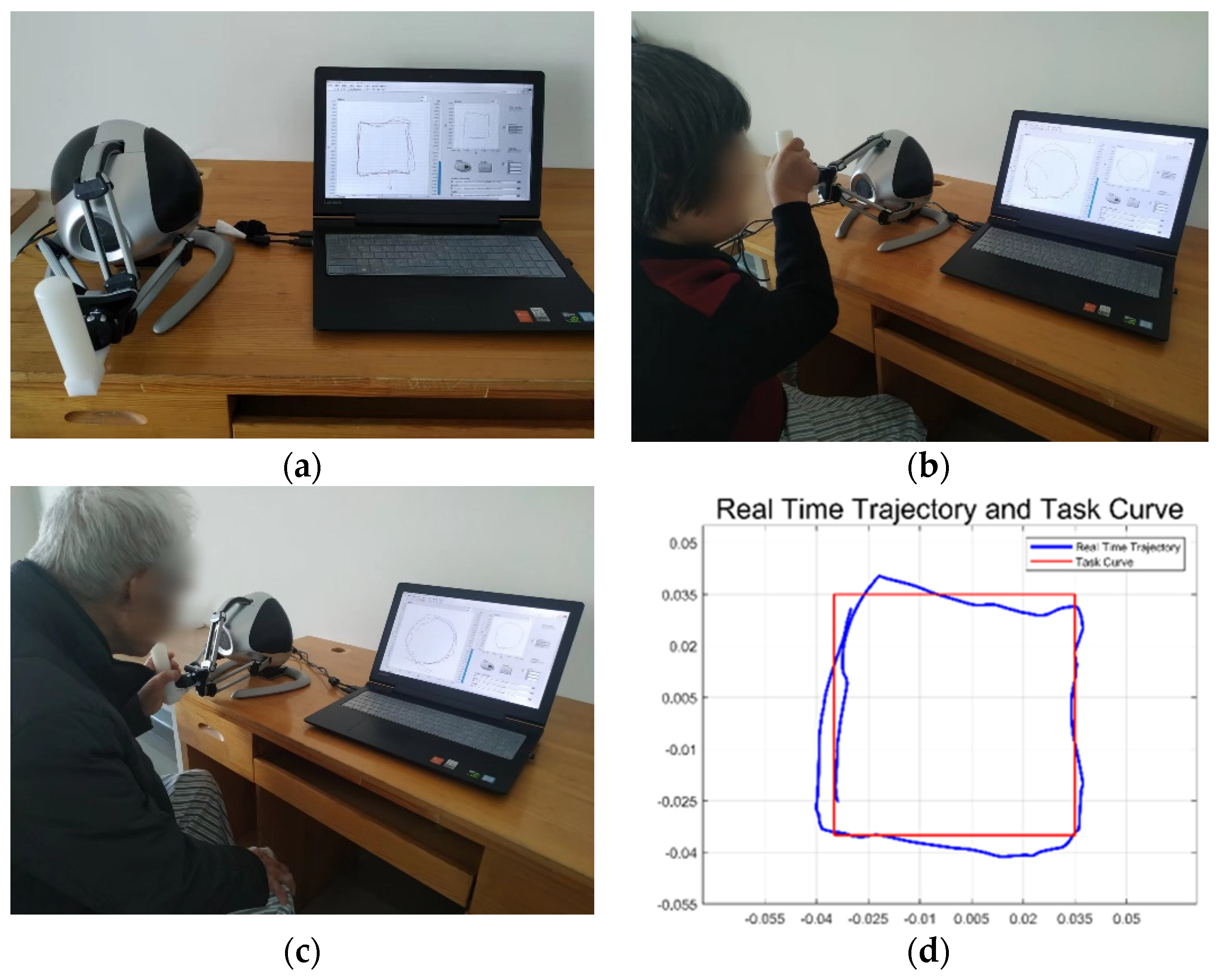
2.3. Experimental Protocol
2.4. Participants
2.5. Data Preprocess
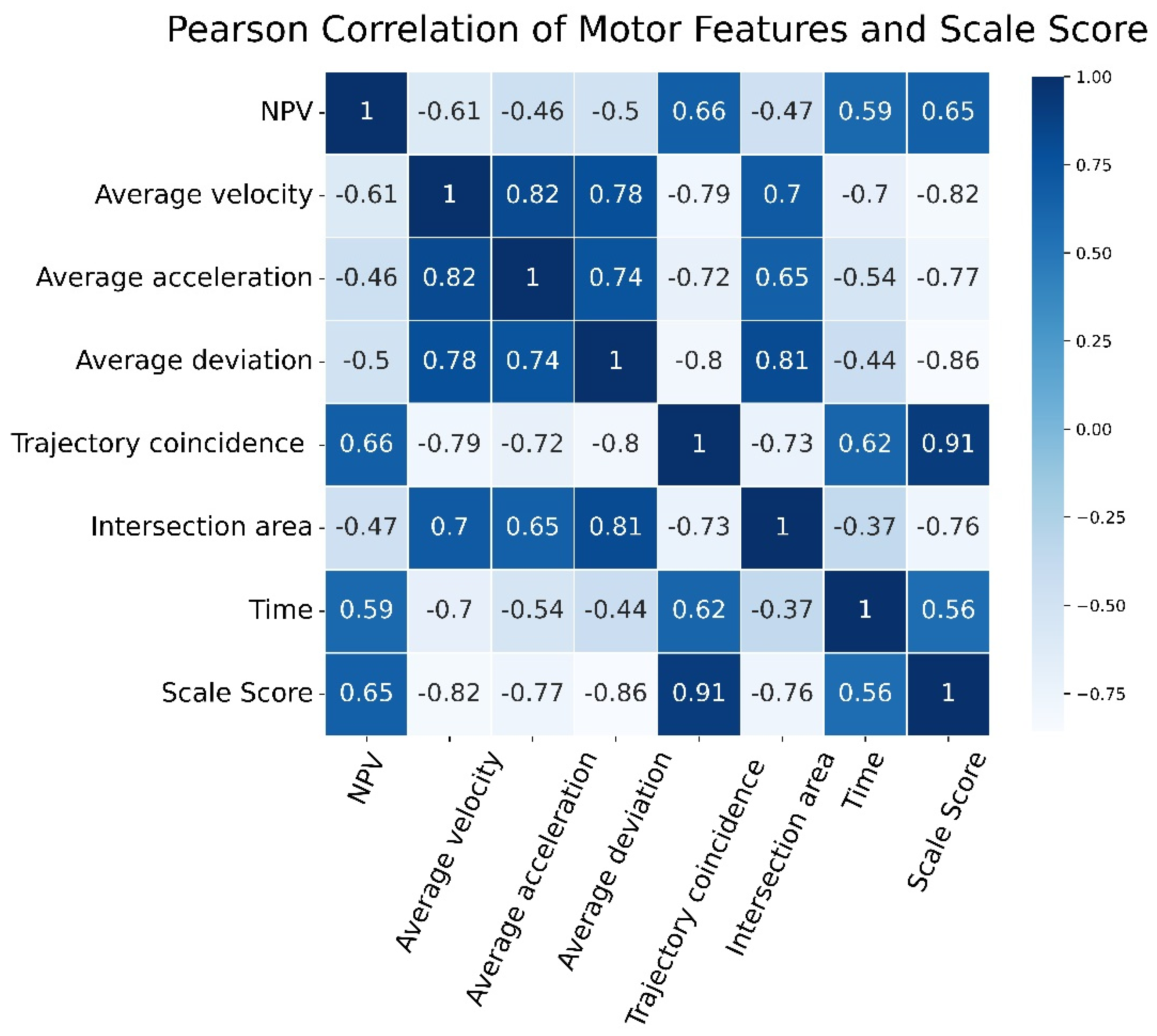
2.5.1. Feature Extraction
2.5.2. Normalization
2.6. Evaluation Models Establishment
2.6.1. RF Model
2.6.2. SVR Model
2.6.3. KNN Model
2.6.4. BPNN Model
2.7. Model Evaluation Index
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Sacco, R.L.; Kasner, S.E.; Broderick, J.P.; Caplan, L.R.; Connors, J.J.; Culebras, A.; Elkind, M.S.; George, M.G.; Hamdan, A.D.; Higashida, R.T. An updated definition of stroke for the 21st century: A statement for healthcare professionals from the American Heart Association/American Stroke Association. Stroke 2013, 44, 2064–2089. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Virani, S.S.; Alonso, A.; Benjamin, E.J.; Bittencourt, M.S. Heart Disease and Stroke Statistics-2020 Update: A Report From the American Heart Association. Circulation 2020, 141, e139–e596. [Google Scholar] [CrossRef] [PubMed]
- Winstein, C.J.; Stein, J.; Arena, R. Guidelines for Adult Stroke Rehabilitation and Recovery: A Guideline for Healthcare Professionals From the American Heart Association/American Stroke Association. Stroke 2016, 47, e98–e169. [Google Scholar] [CrossRef] [PubMed]
- Pollock, A.; Farmer, S.E.; Brady, M.C.; Langhorne, P.; Mead, G.E.; Mehrholz, J.; van Wijck, F. Interventions for improving upper limb function after stroke. Cochrane Database Syst. Rev. 2014, 11, CD010820. [Google Scholar] [CrossRef] [PubMed]
- Coupar, F.; Pollock, A.; Rowe, P.; Weir, C.; Langhorne, P. Predictors of upper limb recovery after stroke: A systematic review and meta-analysis. Clin. Rehabil. 2012, 26, 291–313. [Google Scholar] [CrossRef]
- Xu, Q.; Li, C.; Pan, Y.; Li, W.; Jia, T.; Li, Z.; Ma, D.; Pang, X.; Ji, L. Impact of smart force feedback rehabilitation robot training on upper limb motor function in the subacute stage of stroke. NeuroRehabilitation 2020, 47, 209–215. [Google Scholar] [CrossRef]
- Fong, J.; Ocampo, R.; Gross, D.P.; Tavakoli, M. Intelligent Robotics Incorporating Machine Learning Algorithms for Improving Functional Capacity Evaluation and Occupational Rehabilitation. J. Occup. Rehabil. 2020, 30, 362–370. [Google Scholar] [CrossRef]
- Andaluz, V.H.; Salazar, P.J.; Escudero, V.M.; Bustamante, D.C.; Silva, S.M.; Quevedo, W.; Sánchez, J.S.; Espinosa, E.G.; Rivas, D. Virtual reality integration with force feedback in upper limb rehabilitation. In Advances in Visual Computing; Springer: Cham, Switzerland, 2016; pp. 259–268. [Google Scholar]
- Das, S.; Kishishita, Y.; Tsuji, T.; Lowell, C.; Ogawa, K.; Kurita, Y. ForceHand Glove: A Wearable Force-Feedback Glove With Pneumatic Artificial Muscles (PAMs). IEEE Robot. Autom. Lett. 2018, 3, 2416–2423. [Google Scholar] [CrossRef]
- Frisoli, A.; Salsedo, F.; Bergamasco, M.; Rossi, B.; Carboncini, M.C. A force-feedback exoskeleton for upper-limb rehabilitation in virtual reality. Appl. Bionics Biomech. 2009, 6, 115–126. [Google Scholar] [CrossRef] [Green Version]
- Víctor, H.; Andaluz, P.J.S.; Marcelo Silva, S.; Miguel Escudero, V.; Carlos Bustamante, D. Rehabilitation of upper limb with force feedback. In Proceedings of the 2016 IEEE International Conference on Automatica (ICA-ACCA), Curico, Chile, 19–21 October 2016; Volume 22, pp. 22–104. [Google Scholar]
- Cappa, P.; Clerico, A.; Nov, O.; Porfiri, M. Can force feedback and science learning enhance the effectiveness of neuro-rehabilitation? An experimental study on using a low-cost 3D joystick and a virtual visit to a zoo. PLoS ONE 2013, 8, e83945. [Google Scholar] [CrossRef]
- Tamayo, M.; Salazar, P.J.; Bustamante, D.C.; Silva, S.M.; Escudero, V.M.; Andaluz, V.H. Virtual Rehabilitation of Carpal Tunnel Syndrome Through Force Feedback. Lect. Notes Comput. Sc. 2018, 10851, 153–164. [Google Scholar]
- David, J.; Gladstone, C.J.D.; Black, S.E. The Fugl-Meyer Assessment of Motor Recovery after Stroke A Critical Review of Its Measurement Properties. Neurorehabilit. Neural Repair 2002, 16, 232–240. [Google Scholar]
- Shah, S.K. Reliability of the Original Brunnstrom Recovery Scale Following Hemiplegia. Aust. Occup. Ther. Hurnal 1984, 31, 144–151. [Google Scholar] [CrossRef]
- Yang, G.; Deng, J.; Pang, G.; Zhang, H.; Li, J.; Deng, B.; Pang, Z.; Xu, J.; Jiang, M.; Liljeberg, P.; et al. An IoT-Enabled Stroke Rehabilitation System Based on Smart Wearable Armband and Machine Learning. IEEE J. Transl. Eng. Health Med. 2018, 6, 2100510. [Google Scholar] [CrossRef] [PubMed]
- Chae, S.H.; Kim, Y.; Lee, K.S.; Park, H.S. Development and Clinical Evaluation of a Web-Based Upper Limb Home Rehabilitation System Using a Smartwatch and Machine Learning Model for Chronic Stroke Survivors: Prospective Comparative Study. JMIR Mhealth Uhealth 2020, 8, e17216. [Google Scholar] [CrossRef] [PubMed]
- Zollo, L.; Gallotta, E.; Guglielmelli, E.; Sterzi, S. Robotic technologies and rehabilitation: New tools for upper-limb therapy and assessment in chronic stroke. Eur. J. Phys. Rehabil. Med. 2011, 47, 223–236. [Google Scholar]
- Otten, P.; Kim, J.; Son, S.H. A Framework to Automate Assessment of Upper-Limb Motor Function Impairment: A Feasibility Study. Sensors 2015, 15, 20097–20114. [Google Scholar] [CrossRef] [Green Version]
- Martin, S.; Hillier, N. Characterisation of the Novint Falcon Haptic Device for Application as a Robot Manipulator. In Australasian Conference on Robotics and Automation (ACRA); Citeseer: Sydney, Australia, 2009. [Google Scholar]
- Shah, A.V.; Teuscher, S.; McClain, E.W.; Abbott, J.J. How-to-build-an-inexpensive-5-dof-haptic device using two novint falcon. EuroHaptics 2010, 2010, 136–143. [Google Scholar]
- Gutiérrez, Á.; Sepúlveda-Muñoz, D.; Gil-Agudo, Á.; de los Reyes Guzmán, A. Serious Game Platform with Haptic Feedback and EMG Monitoring for Upper Limb Rehabilitation and Smoothness Quantification on Spinal Cord Injury Patients. Appl. Sci. 2020, 10, 963. [Google Scholar] [CrossRef] [Green Version]
- Barak Ventura, R.; Rizzo, A.; Nov, O.; Porfiri, M. A 3D printing approach toward targeted intervention in telerehabilitation. Sci. Rep. 2020, 10, 3694. [Google Scholar] [CrossRef] [Green Version]
- Scalona, E.; Hayes, D.; Palermo, E.; Del Prete, Z.; Rossi, S. Performance Evaluation of 3D Reaching Tasks Using a Low-cost Haptic Device and Virtual Reality. In Proceedings of the 2017 IEEE International Symposium on Haptic, Audio and Visual Environments and Games (HAVE), Abu Dhabi, United Arab Emirates, 22–23 October 2017; pp. 1–5. [Google Scholar]
- Elena, F.; Gambaro, L.Z.; Guglielmelli, E. Development and Experimental Validation of a Master Interface with Vibrotactile Feedback for Robotic Telesurgery. In Proceedings of the 5th IEEE RAS/EMBS International Conference on Biomedical Robotics and Biomechatronics, Sao Paulo, Brazil, 12–15 August 2014; pp. 726–731. [Google Scholar]
- Singh, D.; Singh, B. Investigating the impact of data normalization on classification performance. Appl. Soft Comput. 2020, 97, 105524. [Google Scholar] [CrossRef]
- Wang, C.; Peng, L.; Hou, Z.G.; Li, J.; Zhang, T.; Zhao, J. Quantitative Assessment of Upper-Limb Motor Function for Post-Stroke Rehabilitation Based on Motor Synergy Analysis and Multi-Modality Fusion. IEEE Trans. Neural. Syst. Rehabil. Eng. 2020, 28, 943–952. [Google Scholar] [CrossRef] [PubMed]
- Lee, S.-H.; Cui, J.; Liu, L.; Su, M.-C.; Zheng, L.; Yeh, S.-C. An Evidence-Based Intelligent Method for Upper-Limb Motor Assessment via a VR Training System on Stroke Rehabilitation. IEEE Access 2021, 9, 65871–65881. [Google Scholar] [CrossRef]
- Shan, G.; Zhang, J.; Ge, Y.; Chen, M. A Comparative Study on the Generalization Ability of back Propagation Neural Network and Support Vector Machine for Tracking Tumor Motion in Radiotherapy. In Proceedings of the 2nd International Conference on Biomedical Engineering and Bioinformatics-ICBEB 2018, Tianjin, China, 19–21 September 2018; pp. 85–88. [Google Scholar]
- Boukhennoufa, I.; Zhai, X.; Utti, V.; Jackson, J.; McDonald-Maier, K.D. Wearable sensors and machine learning in post-stroke rehabilitation assessment: A systematic review. Biomed. Signal Process. Control. 2022, 71, 103197. [Google Scholar] [CrossRef]
- Zhang, M.; Chen, J.; Ling, Z.; Zhang, B.; Yan, Y.; Xiong, D.; Guo, L. Quantitative Evaluation System of Upper Limb Motor Function of Stroke Patients Based on Desktop Rehabilitation Robot. Sensors 2022, 22, 1170. [Google Scholar] [CrossRef]
- Juang, C.-F.; Hsieh, C.-D. TS-fuzzy system-based support vector regression. Fuzzy Sets Syst. 2009, 160, 2486–2504. [Google Scholar] [CrossRef]
- Nguyen, H.; Choi, Y.; Bui, X.N.; Nguyen-Thoi, T. Predicting Blast-Induced Ground Vibration in Open-Pit Mines Using Vibration Sensors and Support Vector Regression-Based Optimization Algorithms. Sensors 2019, 20, 132. [Google Scholar] [CrossRef] [Green Version]
- Cleophas, T.J.; Cleophas, T.F. Artificial intelligence for diagnostic purposes: Principles, procedures and limitations. Clin. Chem. Lab. Med. 2010, 48, 159–165. [Google Scholar] [CrossRef]
- Li, H.; Zhao, G.; Zhou, Y.; Chen, X.; Ji, Z.; Wang, L. Relationship of EMG/SMG features and muscle strength level: An exploratory study on tibialis anterior muscles during plantar-flexion among hemiplegia patients. Biomed. Eng. Online 2014, 2014, 5. [Google Scholar] [CrossRef] [Green Version]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number | Age | Gender | Affected Side | Months after Stroke | Brunnstrom | Scale Score |
|---|---|---|---|---|---|---|
| S1 | 80 | Female | Left | 1 | II | 5 |
| S2 | 57 | Male | Right | 1 | III | 11 |
| S3 | 46 | Male | Right | 2 | V | 19 |
| S4 | 78 | Male | Left | 3 | IV | 17 |
| S5 | 73 | Female | Left | 1 | III | 13 |
| S6 | 54 | Female | Left | 4 | VI | 24 |
| S7 | 73 | Female | Left | 3 | V | 20 |
| S8 | 69 | Male | Right | 3 | VI | 22 |
| S9 | 79 | Female | Left | 1 | II | 7 |
| S10 | 73 | Female | Left | 2 | III | 14 |
| S11 | 78 | Male | Left | 1 | IV | 16 |
| S12 | 73 | Male | Left | 3 | V | 18 |
| S13 | 38 | Male | Right | 2 | V | 21 |
| S14 | 73 | Female | Left | 5 | IV | 16 |
| S15 | 63 | Male | Left | 1 | III | 14 |
| S16 | 62 | Female | Right | 3 | III | 13 |
| S17 | 56 | Male | Right | 2 | V | 19 |
| S18 | 64 | Male | Right | 1 | IV | 17 |
| S19 | 49 | Male | Left | 9 | VI | 22 |
| S20 | 69 | Male | Right | 1.5 | III | 11 |
| S21 | 76 | Male | Right | 6 | II | 9 |
| S22 | 75 | Male | Left | 1 | IV | 14 |
| S23 | 77 | Female | Left | 2 | IV | 15 |
| S24 | 74 | Male | Left | 2 | III | 10 |
| S25 | 58 | Male | Left | 6 | V | 18 |
| Feature Parameters | Definition |
|---|---|
| Number of peaks velocity points | Defined as the number of points on the velocity curve where the instantaneous velocity value is larger than the average velocity. |
| Average velocity | Defined as the average of the instantaneous velocity during the subject’s manipulation of the handle movement. |
| Average acceleration | Defined as the average of the acceleration during the subject’s manipulation of the handle movement. |
| Average trajectory deviation | Defined as the average deviation of the closest distance between the actual trajectory and the given curve. |
| Trajectory coincidence | Defined as the ratio of the overlap length between the actual trajectory and the given curve to the actual trajectory length. |
| Intersected area of trajectory | Defined as the area formed by the intersection area between the actual trajectory and the given curve. |
| Task execution time | Defined as the duration of each task. |
| Index | RF | SVR | KNN | BPNN |
|---|---|---|---|---|
| Accuracy | 90.98% | 88.50% | 89.34% | 94.26% |
| MAE | 1.073 | 1.4918 | 1.3524 | 1.1393 |
| MSE | 4.0164 | 5.9344 | 4.50 | 3.6967 |
| 0.9165 | 0.8820 | 0.9055 | 0.9284 |
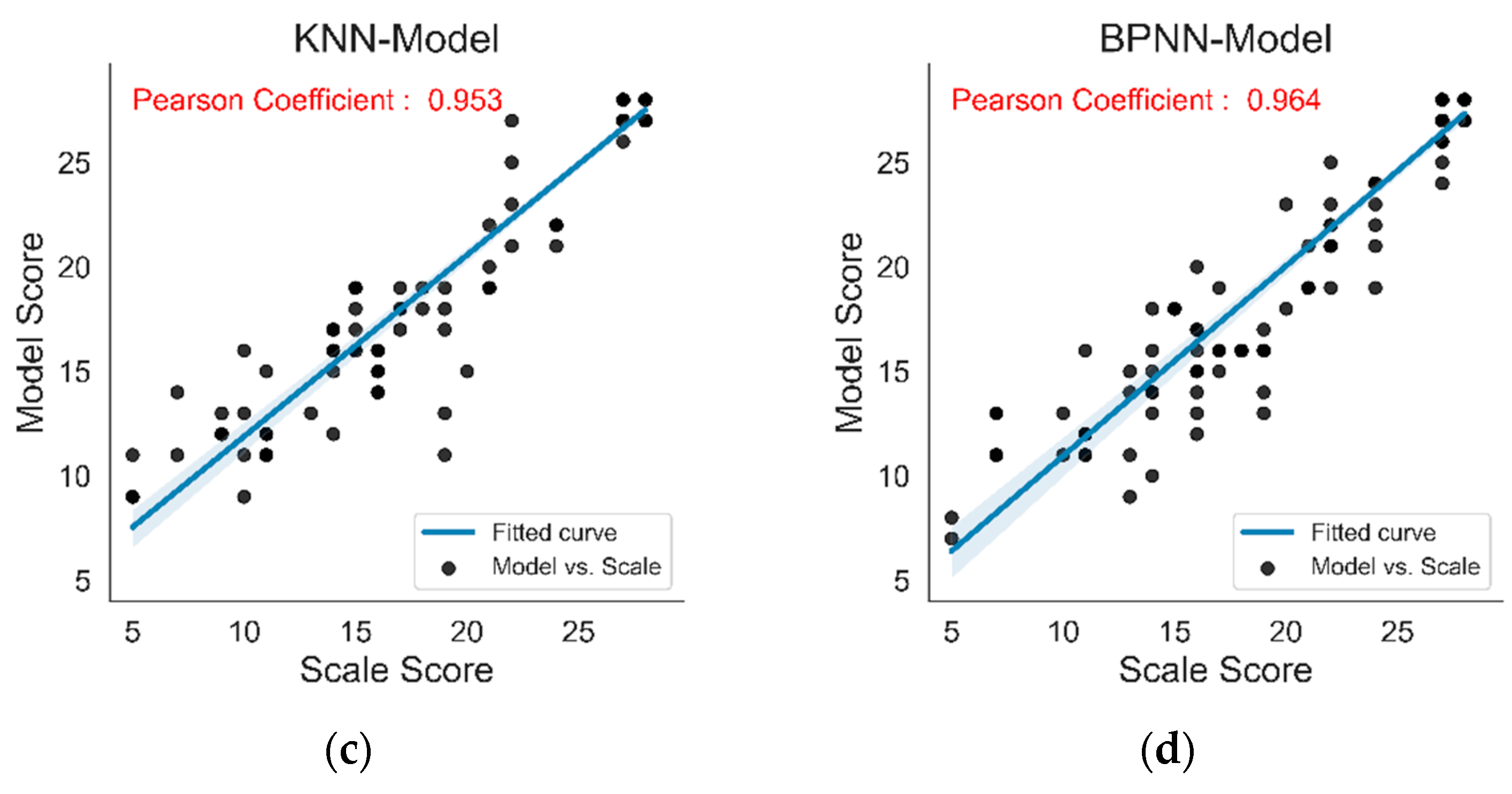
| Coefficient | RF | SVR | KNN | BPNN |
|---|---|---|---|---|
| Spearman | 0.929 | 0.919 | 0.933 | 0.940 |
| Pearson | 0.961 | 0.946 | 0.953 | 0.964 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ding, K.; Zhang, B.; Ling, Z.; Chen, J.; Guo, L.; Xiong, D.; Wang, J. Quantitative Evaluation System of Wrist Motor Function for Stroke Patients Based on Force Feedback. Sensors 2022, 22, 3368. https://doi.org/10.3390/s22093368
Ding K, Zhang B, Ling Z, Chen J, Guo L, Xiong D, Wang J. Quantitative Evaluation System of Wrist Motor Function for Stroke Patients Based on Force Feedback. Sensors. 2022; 22(9):3368. https://doi.org/10.3390/s22093368
Chicago/Turabian StyleDing, Kangjia, Bochao Zhang, Zongquan Ling, Jing Chen, Liquan Guo, Daxi Xiong, and Jiping Wang. 2022. "Quantitative Evaluation System of Wrist Motor Function for Stroke Patients Based on Force Feedback" Sensors 22, no. 9: 3368. https://doi.org/10.3390/s22093368
APA StyleDing, K., Zhang, B., Ling, Z., Chen, J., Guo, L., Xiong, D., & Wang, J. (2022). Quantitative Evaluation System of Wrist Motor Function for Stroke Patients Based on Force Feedback. Sensors, 22(9), 3368. https://doi.org/10.3390/s22093368