
Mapping Tree Canopy in Urban Environments Using Point Clouds from Airborne Laser Scanning and Street Level Imagery

 ,
, 
 and
and 
Abstract
1. Introduction
2. Methodology
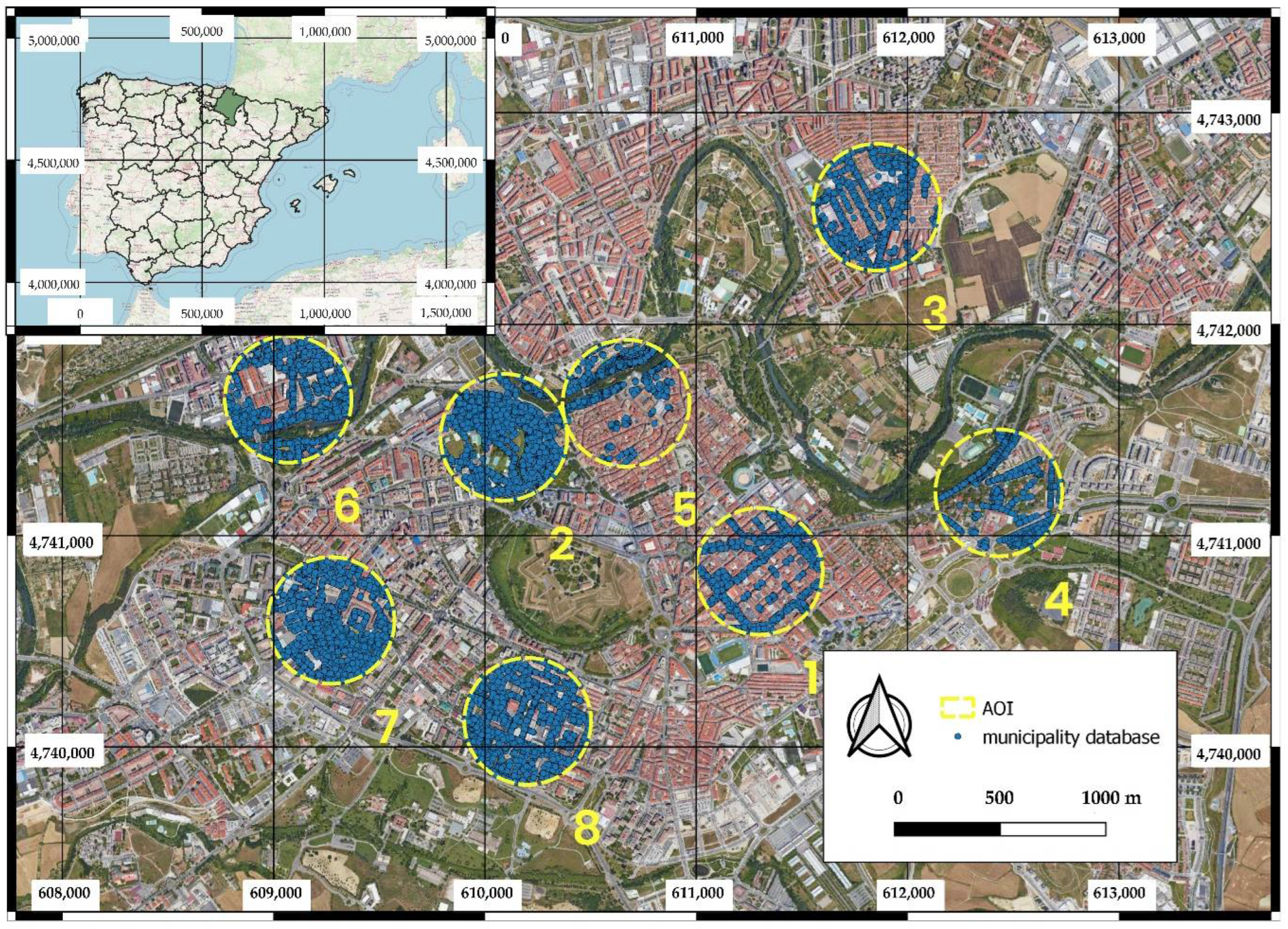
2.1. Study Area and Validation of Results
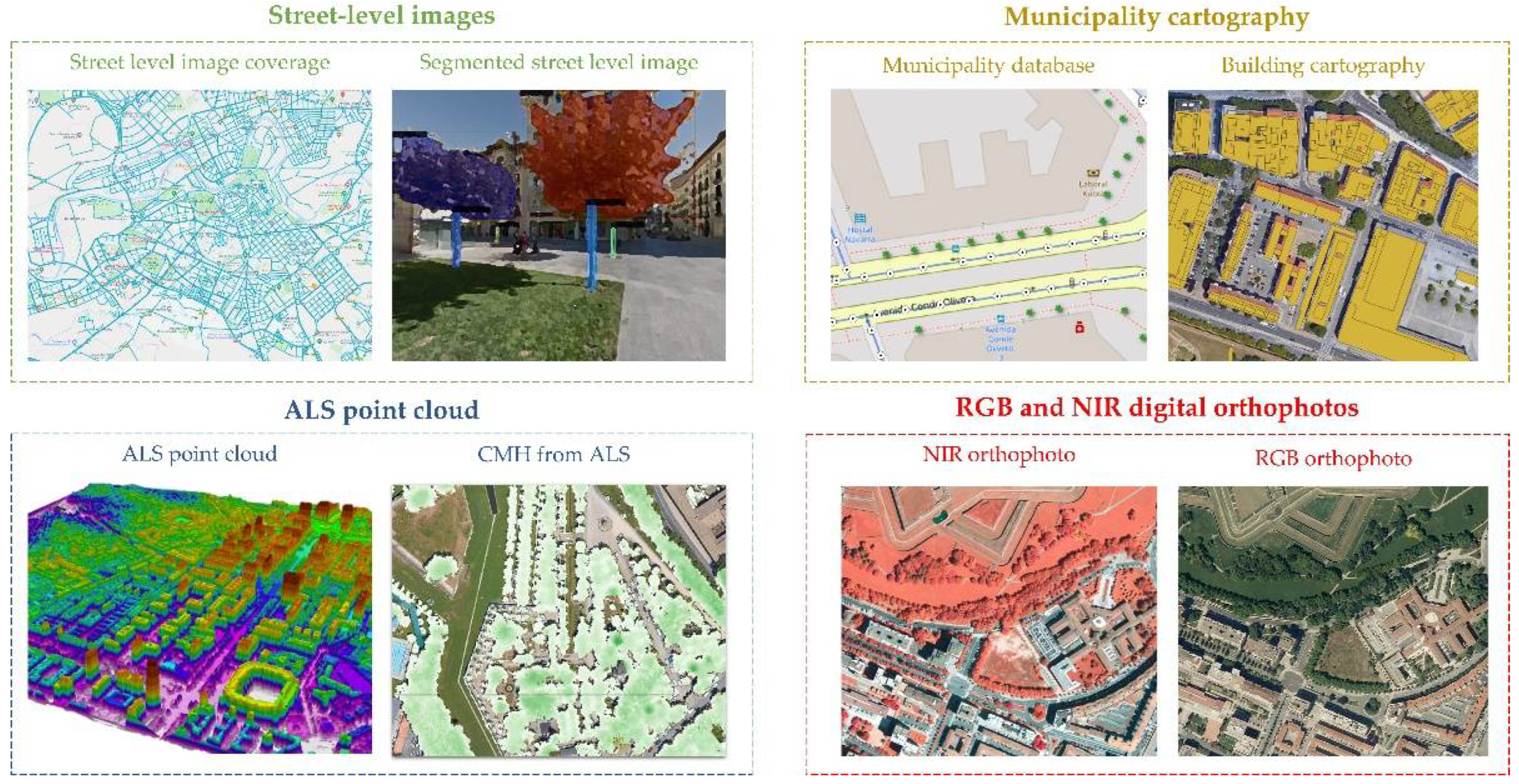
2.2. Remote Data Sources
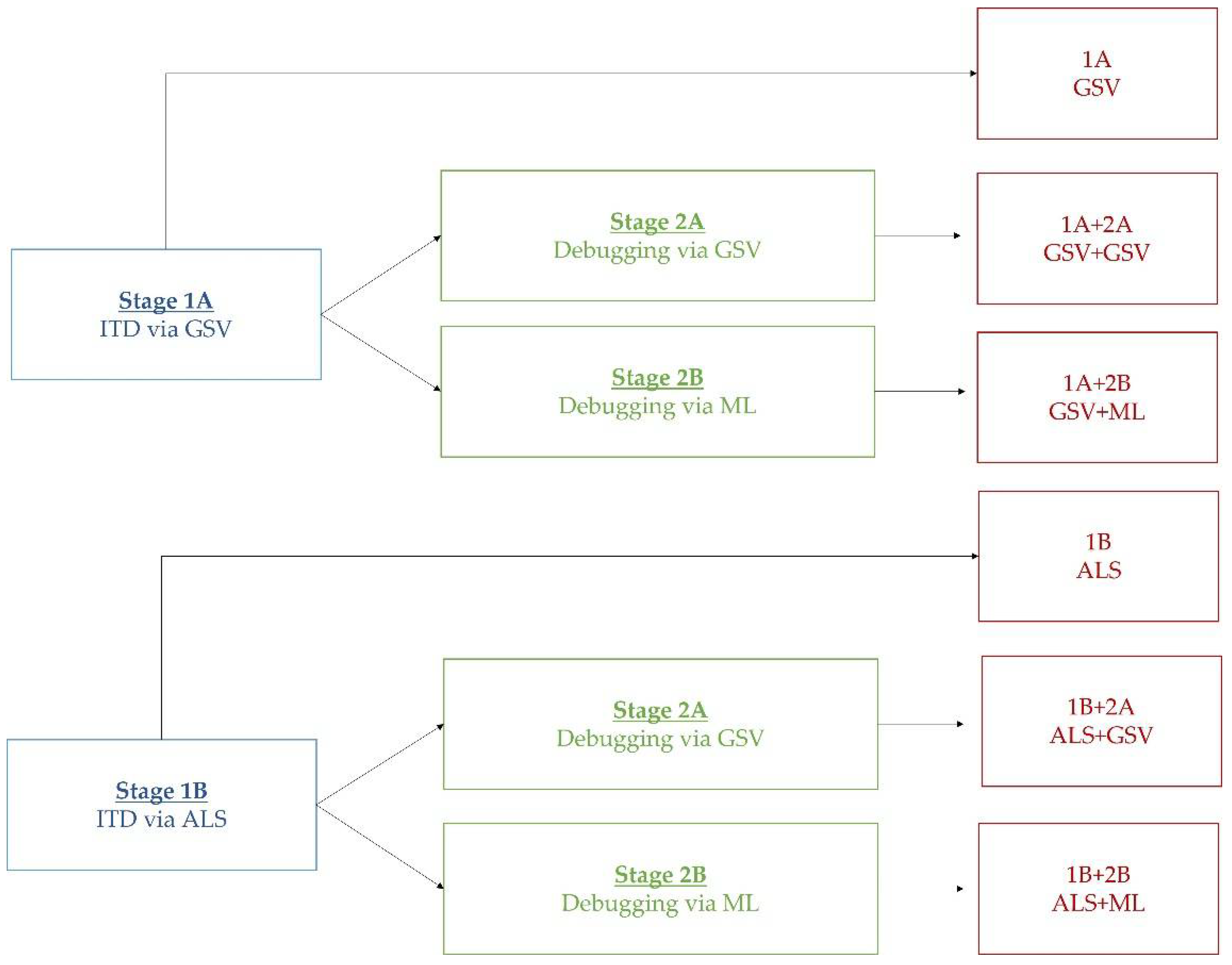
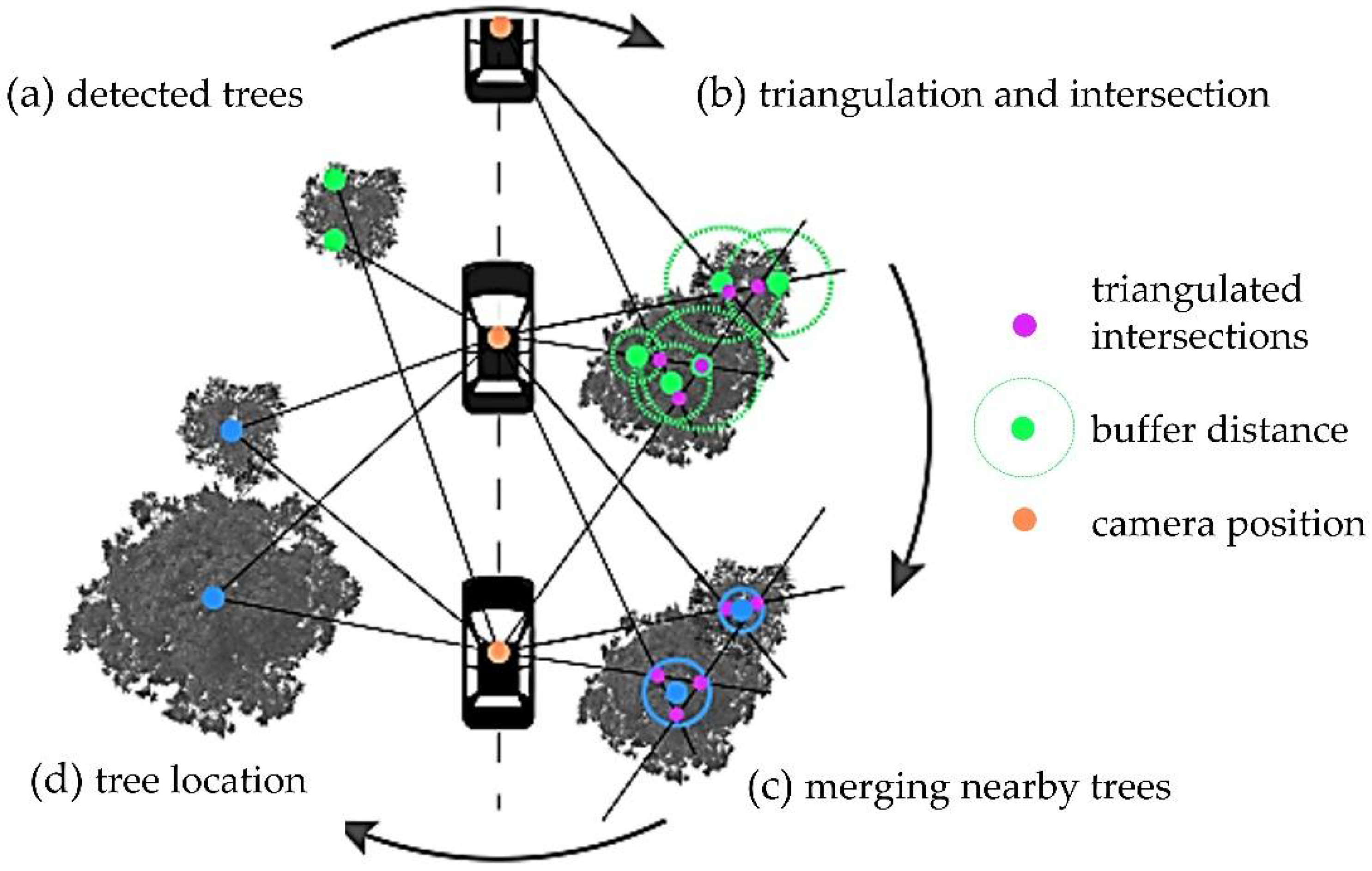
2.3. Geolocation of Urban Trees
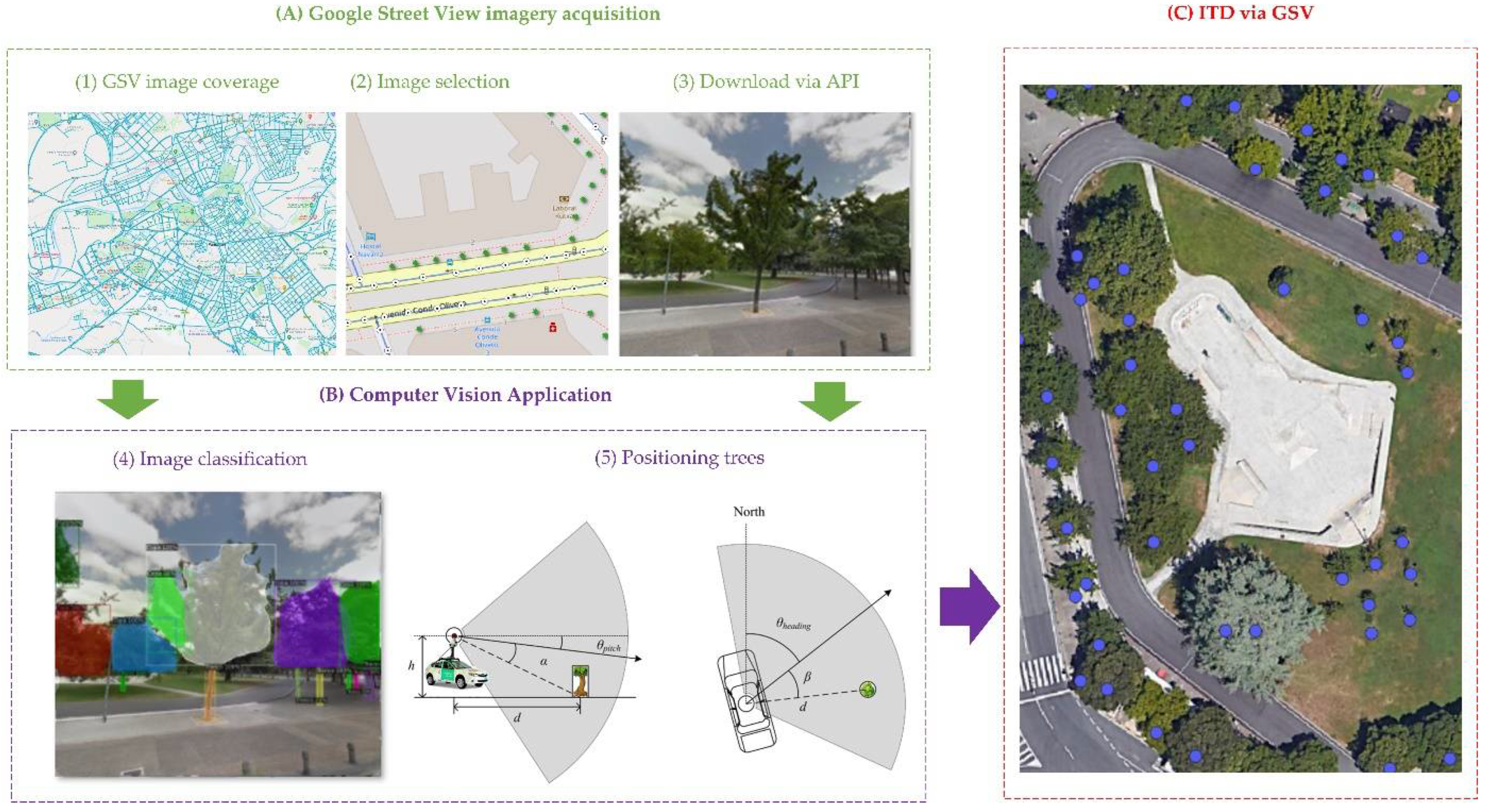
2.3.1. ITD through Computer Vision, Using GSV Images (Stage 1A)
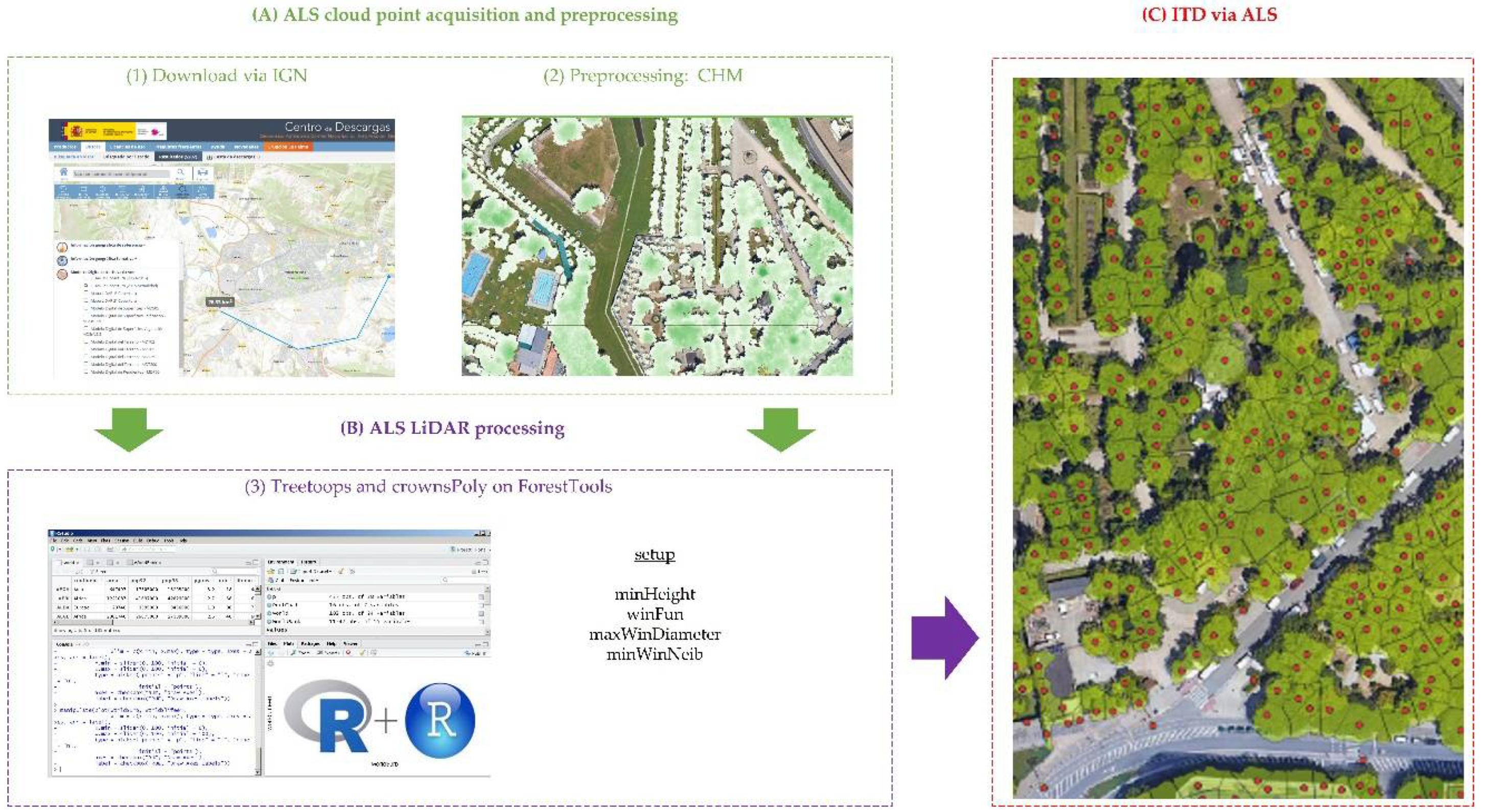
2.3.2. ITD Using ALS Data (Stage 1B)
2.3.3. False Positive Debugging through CV Using GSV Imagery (Stage 2A)
2.3.4. False Positive Debugging through ML Using RGB and NIR Orthophotos (Stage 2B)
2.3.5. Merging Nearby Trees
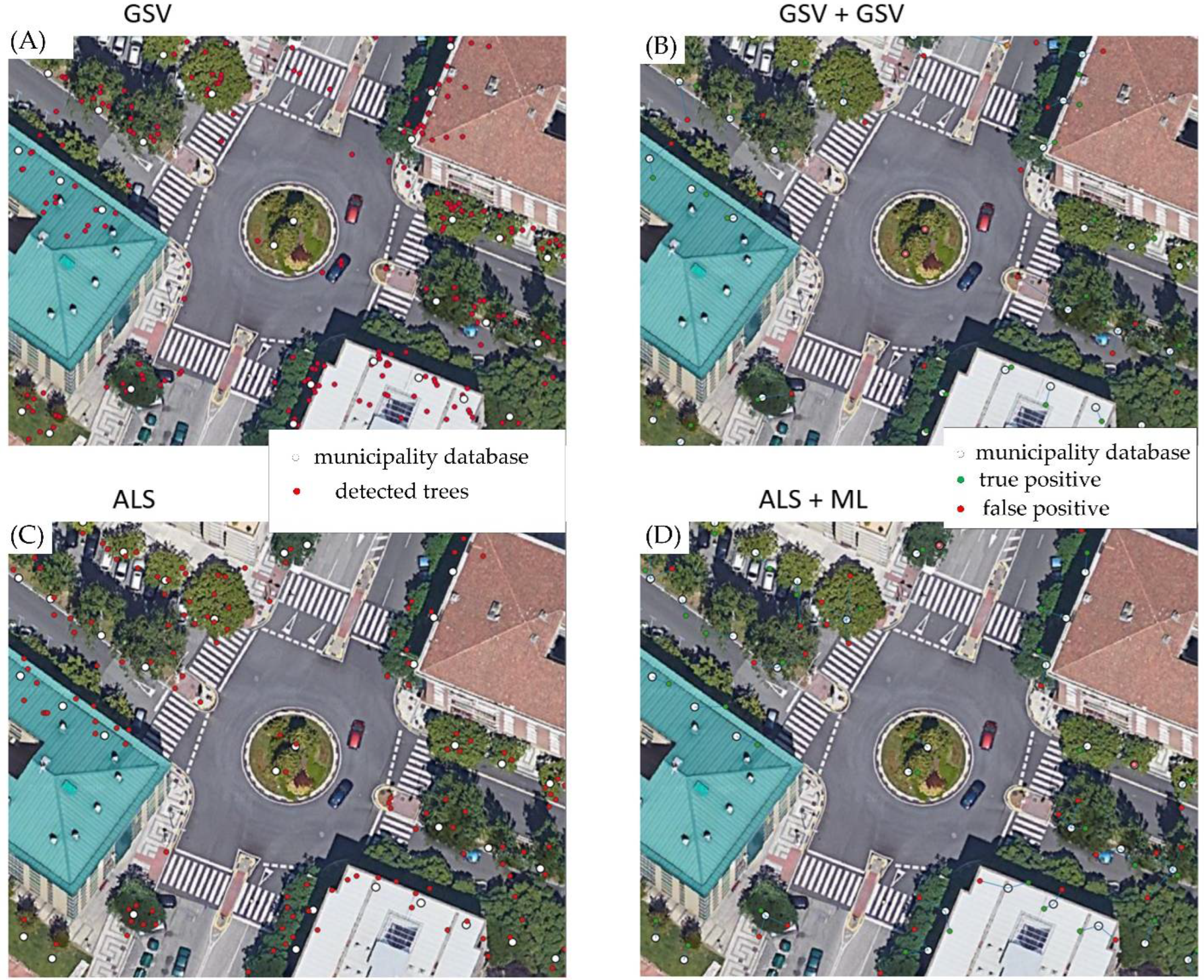
2.3.6. Accuracy Evaluation
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Maes, M.J.A.; Jones, K.E.; Toledano, M.B.; Milligan, B. Mapping Synergies and Trade-Offs between Urban Ecosystems and the Sustainable Development Goals. Environ. Sci. Policy 2019, 93, 181–188. [Google Scholar] [CrossRef]
- Hamstead, Z.A.; Iwaniec, D.M.; McPhearson, T.; Berbés-Blázquez, M.; Cook, E.M.; Muñoz-Erickson, T.A. Resilient Urban Futures; Springer International Publishing: Cham, Switzerland, 2021; ISBN 978-3-030-63130-7. [Google Scholar]
- Iwaniec, D.M.; Grimm, N.B.; McPhearson, T.; Berbés-Blázquez, M.; Cook, E.M.; Muñoz-Erickson, T.A. A Framework for Resilient Urban Futures. In Resilient Urban Futures; Springer International Publishing: Cham, Switzerland, 2021. [Google Scholar]
- Branson, S.; Wegner, J.D.; Hall, D.; Lang, N.; Schindler, K.; Perona, P. From Google Maps to a Fine-Grained Catalog of Street Trees. ISPRS J. Photogramm. Remote Sens. 2018, 135, 13–30. [Google Scholar] [CrossRef]
- Cai, B.Y.; Li, X.; Seiferling, I.; Ratti, C. Treepedia 2.0: Applying Deep Learning for Large-Scale Quantification of Urban Tree Cover. In Proceedings of the 2018 IEEE International Congress on Big Data, Big Data Congress 2018, San Francisco, CA, USA, 2–7 July 2018. [Google Scholar]
- Chen, Q.; Baldocchi, D.; Gong, P.; Kelly, M. Isolating Individual Trees in a Savanna Woodland Using Small Footprint Lidar Data. Photogramm. Eng. Remote Sens. 2006, 72, 923–932. [Google Scholar] [CrossRef]
- McHale, M.R.; Burke, I.C.; Lefsky, M.A.; Peper, P.J.; McPherson, E.G. Urban Forest Biomass Estimates: Is It Important to Use Allometric Relationships Developed Specifically for Urban Trees? Urban Ecosyst. 2009, 12, 95–113. [Google Scholar] [CrossRef]
- Pearlmutter, D.; Calfapietra, C.; Samson, R.; O’Brien, L.; Krajter Ostoić, S.; Sanesi, G.; Alonso del Amo, R. The Urban Forest: Cultivating Green Infrastructure for People and the Environment; Springer International Publishing: Cham, Switzerland, 2017; Volume 7, ISBN 978-3-319-50279-3. [Google Scholar]
- Lumnitz, S.; Devisscher, T.; Mayaud, J.R.; Radic, V.; Coops, N.C.; Griess, V.C. Mapping Trees along Urban Street Networks with Deep Learning and Street-Level Imagery. ISPRS J. Photogramm. Remote Sens. 2021, 175, 144–157. [Google Scholar] [CrossRef]
- Keller, J.K.K.; Konijnendijk, C.C.; Van Den Bosch, C. Keller and Konijnendijk: A Comparative Analysis of Municipal Urban Tree Inventories Short Communication: A Comparative Analysis of Municipal Urban Tree Inventories of Selected Major Cities in North America and Europe. Arboric. Urban For. 2012, 38, 24–30. [Google Scholar] [CrossRef]
- Nielsen, A.B.; Östberg, J.; Delshammar, T. Review of Urban Tree Inventory Methods Used to Collect Data at Single-Tree Level. Arboric. Urban For. 2014, 40, 96–111. [Google Scholar] [CrossRef]
- Stubbings, P.; Peskett, J.; Rowe, F.; Arribas-Bel, D. A Hierarchical Urban Forest Index Using Street-Level Imagery and Deep Learning. Remote Sens. 2019, 11, 1395. [Google Scholar] [CrossRef]
- Ma, L.; Liu, Y.; Zhang, X.; Ye, Y.; Yin, G.; Johnson, B.A. Deep Learning in Remote Sensing Applications: A Meta-Analysis and Review. ISPRS J. Photogramm. Remote Sens. 2019, 152, 166–177. [Google Scholar] [CrossRef]
- Berland, A.; Lange, D.A. Google Street View Shows Promise for Virtual Street Tree Surveys. Urban For. Urban Green. 2017, 21, 11–15. [Google Scholar] [CrossRef]
- Brandtberg, T.; Walter, F. Automated Delineation of Individual Tree Crowns in High Spatial Resolution Aerial Images by Multiple-Scale Analysis. Mach. Vis. Appl. 1998, 11, 64–73. [Google Scholar] [CrossRef]
- Wang, L.; Gong, P.; Biging, G.S. Individual Tree-Crown Delineation and Treetop Detection in High-Spatial-Resolution Aerial Imagery. Photogramm. Eng. Remote Sens. 2004, 70, 351–357. [Google Scholar] [CrossRef]
- Ke, Y.; Quackenbush, L.J. A Review of Methods for Automatic Individual Tree-Crown Detection and Delineation from Passive Remote Sensing. Int. J. Remote Sens. 2011, 32, 4725–4747. [Google Scholar] [CrossRef]
- Ferraz, A.; Saatchi, S.; Mallet, C.; Meyer, V. Lidar Detection of Individual Tree Size in Tropical Forests. Remote Sens. Environ. 2016, 183, 318–333. [Google Scholar] [CrossRef]
- Gomes, M.F.; Maillard, P.; Deng, H. Individual Tree Crown Detection in Sub-Meter Satellite Imagery Using Marked Point Processes and a Geometrical-Optical Model. Remote Sens. Environ. 2018, 211, 184–195. [Google Scholar] [CrossRef]
- Kansanen, K.; Vauhkonen, J.; Lähivaara, T.; Seppänen, A.; Maltamo, M.; Mehtätalo, L. Estimating Forest Stand Density and Structure Using Bayesian Individual Tree Detection, Stochastic Geometry, and Distribution Matching. ISPRS J. Photogramm. Remote Sens. 2019, 152, 66–78. [Google Scholar] [CrossRef]
- Hansen, E.; Gobakken, T.; Bollandsås, O.; Zahabu, E.; Næsset, E. Modeling Aboveground Biomass in Dense Tropical Submontane Rainforest Using Airborne Laser Scanner Data. Remote Sens. 2015, 7, 788–807. [Google Scholar] [CrossRef]
- Yu, X.; Hyyppä, J.; Karjalainen, M.; Nurminen, K.; Karila, K.; Vastaranta, M.; Kankare, V.; Kaartinen, H.; Holopainen, M.; Honkavaara, E.; et al. Comparison of Laser and Stereo Optical, SAR and InSAR Point Clouds from Air- and Space-Borne Sources in the Retrieval of Forest Inventory Attributes. Remote Sens. 2015, 7, 15933–15954. [Google Scholar] [CrossRef]
- Zhang, Z.; Papaik, M.J.; Wang, X.; Hao, Z.; Ye, J.; Lin, F.; Yuan, Z. The Effect of Tree Size, Neighborhood Competition and Environment on Tree Growth in an Old-Growth Temperate Forest. J. Plant. Ecol. 2016, 10, 970–980. [Google Scholar] [CrossRef]
- Wulder, M.; Niemann, K.O.; Goodenough, D.G. Local Maximum Filtering for the Extraction of Tree Locations and Basal Area from High Spatial Resolution Imagery. Remote Sens. Environ. 2000, 73, 103–114. [Google Scholar] [CrossRef]
- Zaforemska, A.; Xiao, W.; Gaulton, R. Individual Tree Detection from Uav LiDAR Data in a Mixed Species Woodland. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, XLII-2/W13, 657–663. [Google Scholar] [CrossRef]
- Valbuena-Rabadán, M.-Á.; Santamaría-Peña, J.; Sanz-Adán, F. Estimation of Diameter and Height of Individual Trees for Pinus Sylvestris, L. Based on the Individualising of Crowns Using Airborne LiDAR and the National Forestry Inventory Data. For. Syst. 2016, 25, e046. [Google Scholar] [CrossRef]
- Wallace, L.; Lucieer, A.; Watson, C.S. Evaluating Tree Detection and Segmentation Routines on Very High Resolution UAV LiDAR Data. IEEE Trans. Geosci. Remote Sens. 2014, 52, 7619–7628. [Google Scholar] [CrossRef]
- Mohan, M.; Silva, C.; Klauberg, C.; Jat, P.; Catts, G.; Cardil, A.; Hudak, A.; Dia, M. Individual Tree Detection from Unmanned Aerial Vehicle (UAV) Derived Canopy Height Model in an Open Canopy Mixed Conifer Forest. Forests 2017, 8, 340. [Google Scholar] [CrossRef]
- Solberg, S.; Naesset, E.; Bollandsas, O.M. Single Tree Segmentation Using Airborne Laser Scanner Data in a Structurally Heterogeneous Spruce Forest. Photogramm. Eng. Remote Sens. 2006, 72, 1369–1378. [Google Scholar] [CrossRef]
- Dalponte, M.; Coomes, D.A. Tree-centric Mapping of Forest Carbon Density from Airborne Laser Scanning and Hyperspectral Data. Methods Ecol. Evol. 2016, 7, 1236–1245. [Google Scholar] [CrossRef] [PubMed]
- Gupta, S.; Weinacker, H.; Koch, B. Comparative Analysis of Clustering-Based Approaches for 3-D Single Tree Detection Using Airborne Fullwave Lidar Data. Remote Sens. 2010, 2, 968–989. [Google Scholar] [CrossRef]
- Ferraz, A.; Bretar, F.; Jacquemoud, S.; Gonçalves, G.; Pereira, L.; Tomé, M.; Soares, P. 3-D Mapping of a Multi-Layered Mediterranean Forest Using ALS Data. Remote Sens. Environ. 2012, 121, 210–223. [Google Scholar] [CrossRef]
- Lindberg, E.; Eysn, L.; Hollaus, M.; Holmgren, J.; Pfeifer, N. Delineation of Tree Crowns and Tree Species Classification from Full-Waveform Airborne Laser Scanning Data Using 3-D Ellipsoidal Clustering. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 3174–3181. [Google Scholar] [CrossRef]
- Xiao, W.; Xu, S.; Elberink, S.O.; Vosselman, G. Individual Tree Crown Modeling and Change Detection from Airborne Lidar Data. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 3467–3477. [Google Scholar] [CrossRef]
- Cinnamon, J.; Jahiu, L. Panoramic Street-Level Imagery in Data-Driven Urban Research: A Comprehensive Global Review of Applications, Techniques, and Practical Considerations. ISPRS Int. J. Geo-Inf. 2021, 10, 471. [Google Scholar] [CrossRef]
- Shapiro, A. Street-Level: Google Street View’s Abstraction by Datafication. New Media Soc. 2018, 20, 1201–1219. [Google Scholar] [CrossRef]
- Rousselet, J.; Imbert, C.-E.; Dekri, A.; Garcia, J.; Goussard, F.; Vincent, B.; Denux, O.; Robinet, C.; Dorkeld, F.; Roques, A. Assessing Species Distribution Using Google Street View: A Pilot Study with the Pine Processionary Moth. PLoS ONE 2013, 8, e74918. [Google Scholar]
- Wegner, J.D.; Branson, S.; Hall, D.; Schindler, K.; Perona, P. Cataloging Public Objects Using Aerial and Street-Level Images-Urban Trees. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 6014–6023. [Google Scholar]
- Myneni, R.B.; Hall, F.G.; Sellers, P.J.; Marshak, A.L. Interpretation of Spectral Vegetation Indexes. IEEE Trans. Geosci. Remote Sens. 1995, 33, 481–486. [Google Scholar] [CrossRef]
- Forsyth, D.; Ponce, J. Computer Vision: A Modern Approach; Prentice Hall: Hoboken, NJ, USA, 2011; ISBN 013608592X. [Google Scholar]
- Gonzalez, R.C.; Woods, R.E. Digital Image Processing, 2nd ed.; Addison-Wesley Pub: Boston, MA, USA, 2002; Volume 455. [Google Scholar]
- Voulodimos, A.; Doulamis, N.; Doulamis, A.; Protopapadakis, E. Deep Learning for Computer Vision: A Brief Review. Comput. Intell. Neurosci. 2018, 2018, 7068349. [Google Scholar] [CrossRef]
- Lin, T.-Y.; Maire, M.; Belongie, S.; Bourdev, L.; Girshick, R.; Hays, J.; Perona, P.; Ramanan, D.; Zitnick, C.L.; Dollár, P. Microsoft COCO: Common Objects in Context. arXiv 2015, arXiv:1405.0312. [Google Scholar]
- He, K.; Gkioxari, G.; Dollár, P.; Girshick, R. Mask R-Cnn. arXiv 2017, arXiv:1703.06870. [Google Scholar]
- Naik, N.; Kominers, S.D.; Raskar, R.; Glaeser, E.L.; Hidalgo, C. Do People Shape Cities, or Do Cities Shape People? The Co-Evolution of Physical, Social, and Economic Change in Five Major U.S. Cities. SSRN Electron. J. 2015. [Google Scholar] [CrossRef]
- Kang, J.; Körner, M.; Wang, Y.; Taubenböck, H.; Zhu, X.X. Building Instance Classification Using Street View Images. ISPRS J. Photogramm. Remote Sens. 2018, 145, 44–59. [Google Scholar] [CrossRef]
- Middel, A.; Lukasczyk, J.; Zakrzewski, S.; Arnold, M.; Maciejewski, R. Urban Form and Composition of Street Canyons: A Human-Centric Big Data and Deep Learning Approach. Landsc. Urban Plan. 2019, 183, 122–132. [Google Scholar] [CrossRef]
- Seiferling, I.; Naik, N.; Ratti, C.; Proulx, R. Green Streets—Quantifying and Mapping Urban Trees with Street-Level Imagery and Computer Vision. Landsc. Urban Plan. 2017, 165, 93–101. [Google Scholar] [CrossRef]
- Li, X.; Zhang, C.; Li, W.; Ricard, R.; Meng, Q.; Zhang, W. Assessing Street-Level Urban Greenery Using Google Street View and a Modified Green View Index. Urban For. Urban Green. 2015, 14, 675–685. [Google Scholar] [CrossRef]
- Duarte, F.; Ratti, C. What Big Data Tell Us about Trees and the Sky in the Cities. In Humanizing Digital Reality; Springer: Berlin/Heidelberg, Germany, 2018; pp. 59–62. [Google Scholar]
- Li, X.; Ratti, C. Using Google Street View for Street-Level Urban Form Analysis, a Case Study in Cambridge, Massachusetts. In Modeling and Simulation in Science, Engineering and Technology; Springer: Berlin/Heidelberg, Germany, 2019. [Google Scholar]
- Li, X.; Ratti, C.; Seiferling, I. Mapping Urban Landscapes along Streets Using Google Street View; Lecture Notes in Geoinformation and Cartography; Springer: Berlin/Heidelberg, Germany, 2017. [Google Scholar]
- Li, X.; Ratti, C.; Seiferling, I. Quantifying the Shade Provision of Street Trees in Urban Landscape: A Case Study in Boston, USA, Using Google Street View. Landsc. Urban Plan. 2018, 169, 81–91. [Google Scholar] [CrossRef]
- Graser, A. Learning Qgis; Packt Publishing Ltd.: Birmingham, UK, 2016; ISBN 1785888153. [Google Scholar]
- Picos, J.; Bastos, G.; Míguez, D.; Alonso, L.; Armesto, J. Individual Tree Detection in a Eucalyptus Plantation Using Unmanned Aerial Vehicle (UAV)-LiDAR. Remote Sens. 2020, 12, 885. [Google Scholar] [CrossRef]
- Zhang, C.; Zhou, Y.; Qiu, F. Individual Tree Segmentation from LiDAR Point Clouds for Urban Forest Inventory. Remote Sens. 2015, 7, 7892–7913. [Google Scholar] [CrossRef]
- Timilsina, S.; Aryal, J.; Kirkpatrick, J.B. Mapping Urban Tree Cover Changes Using Object-Based Convolution Neural Network (OB-CNN). Remote Sens. 2020, 12, 3017. [Google Scholar] [CrossRef]
- Hanssen, F.; Barton, D.N.; Venter, Z.S.; Nowell, M.S.; Cimburova, Z. Utilizing LiDAR Data to Map Tree Canopy for Urban Ecosystem Extent and Condition Accounts in Oslo. Ecol. Indic. 2021, 130, 108007. [Google Scholar] [CrossRef]
- Tanhuanpää, T.; Vastaranta, M.; Kankare, V.; Holopainen, M.; Hyyppä, J.; Hyyppä, H.; Alho, P.; Raisio, J. Mapping of Urban Roadside Trees—A Case Study in the Tree Register Update Process in Helsinki City. Urban For. Urban Green. 2014, 13, 562–570. [Google Scholar] [CrossRef]
- Holopainen, M.; Vastaranta, M.; Kankare, V.; Hyyppä, H.; Vaaja, M.; Hyyppä, J.; Liang, X.; Litkey, P.; Yu, X.; Kaartinen, H.; et al. The Use of ALS, TLS and VLS Measurements in Mapping and Monitoring Urban Trees. In Proceedings of the 2011 Joint Urban Remote Sensing Event, Munich, Germany, 10–13 April 2011; pp. 29–32. [Google Scholar]
- Google. Google Street View Image API; Google: Mountain View, CA, USA, 2012. [Google Scholar]
- Wu, Y.; Kirillov, A.; Massa, F.; Lo, W.-Y.; Girshick, R.; Wu, U.; Kirillov, A.; Massa, F.; Wan-YenLo; Girshick, R. Detectron2. Available online: https://github.com/facebookresearch/detectron2 (accessed on 18 January 2022).
- Mohan, M.; Mendonça, B.A.F.; de Silva, C.A.; Klauberg, C.; de Saboya Ribeiro, A.S.; Araújo, E.J.G.; de Monte, M.A.; Cardil, A. Optimizing Individual Tree Detection Accuracy and Measuring Forest Uniformity in Coconut (Cocos nucifera L.) Plantations Using Airborne Laser Scanning. Ecol. Model. 2019, 409, 108736. [Google Scholar] [CrossRef]
- Mohan, M.; Leite, R.V.; Broadbent, E.N.; Jaafar, W.S.W.M.; Srinivasan, S.; Bajaj, S.; Corte, A.P.D.; Amaral, C.H.; do Gopan, G.; Saad, S.N.M.; et al. Individual Tree Detection Using UAV-Lidar and UAV-SfM Data: A Tutorial for Beginners. Open Geosci. 2021, 13, 1028–1039. [Google Scholar] [CrossRef]
- Hornik, K. The Comprehensive R Archive Network. Wiley Interdiscip. Rev. Comput. Stat. 2012, 4, 394–398. [Google Scholar] [CrossRef]
- Plowright, A. R Package ‘ForestTools’ CRAN. Available online: https://github.com/andrew-plowright/ForestTools (accessed on 18 January 2022).
- Roussel, J.-R.; Auty, D.; Coops, N.C.; Tompalski, P.; Goodbody, T.R.H.; Meador, A.S.; Bourdon, J.-F.; de Boissieu, F.; Achim, A. LidR: An R Package for Analysis of Airborne Laser Scanning (ALS) Data. Remote Sens. Environ. 2020, 251, 112061. [Google Scholar] [CrossRef]
- Silva, C.A.; Crookston, N.L.; Hudak, A.T.; Vierling, L.A.; Klauberg, C.; Cardil, A. RLiDAR: LiDAR Data Processing and Visualization, R Package Version 0.1.5. 2017. Available online: https://cran.r-project.org/web/packages/rLiDAR/rLiDAR.pdf (accessed on 10 March 2022).
- Silva, C.A.; Klauberg, C.; Mohan, M.M.; Bright, B.C. LiDAR Analysis in R and RLiDAR for Forestry Applications. NR 404/504 Lidar Remote Sens. Environ. Monit. Universyty of Idaho. 2018, pp. 1–90. Available online: https://www.researchgate.net/profile/Carlos-Silva-109/publication/324437694_LiDAR_Analysis_in_R_and_rLiDAR_for_Forestry_Applications/links/5acd932faca2723a333fc1b2/LiDAR-Analysis-in-R-and-rLiDAR-for-Forestry-Applications.pdf?origin=publication_detail (accessed on 10 March 2022).
- McGaughey, R.J. FUSION/LDV: Software for LiDAR Data Analysis and Visualization; Version 3.01; US Department of Agriculture, Forest Service, Pacific Northwest Research Station; University of Washington: Seattle, WA, USA, 2012. [Google Scholar]
- Popescu, S.C.; Wynne, R.H.; Nelson, R.F. Estimating Plot-Level Tree Heights with Lidar: Local Filtering with a Canopy-Height Based Variable Window Size. Comput. Electron. Agric. 2003, 37, 71–95. [Google Scholar] [CrossRef]
- Genuer, R.; Poggi, J.-M.; Tuleau-Malot, C. Vsurf: An R Package for Variable Selection Using Random Forests. R J. 2015, 7, 19–33. [Google Scholar] [CrossRef]
- Rodríguez-Puerta, F.; Ponce, R.A.; Pérez-Rodríguez, F.; Águeda, B.; Martín-García, S.; Martínez-Rodrigo, R.; Lizarralde, I. Comparison of Machine Learning Algorithms for Wildland-Urban Interface Fuelbreak Planning Integrating Als and Uav-Borne Lidar Data and Multispectral Images. Drones 2020, 4, 21. [Google Scholar] [CrossRef]
- Kuhn, M. Building Predictive Models in R Using the Caret Package. J. Stat. Softw 2008, 28, 1–26. [Google Scholar] [CrossRef]
- Goutte, C.; Gaussier, E. A Probabilistic Interpretation of Precision, Recall and F-Score, with Implication for Evaluation; Losada, D.E., Fernández-Luna, J.M., Eds.; Springer: Berlin/Heidelberg, Germany, 2005; pp. 345–359. [Google Scholar]
- Sokolova, M.; Japkowicz, N.; Szpakowicz, S. Beyond Accuracy, F-Score and ROC: A Family of Discriminant Measures for Performance Evaluation; Sattar, A., Kang, B., Eds.; Springer: Berlin/Heidelberg, Germany, 2006; pp. 1015–1021. [Google Scholar]
- Matasci, G.; Coops, N.C.; Williams, D.A.R.; Page, N. Mapping Tree Canopies in Urban Environments Using Airborne Laser Scanning (ALS): A Vancouver Case Study. For. Ecosyst. 2018, 5, 31. [Google Scholar] [CrossRef]
- Wu, J.; Yao, W.; Polewski, P. Mapping Individual Tree Species and Vitality along Urban Road Corridors with LiDAR and Imaging Sensors: Point Density versus View Perspective. Remote Sens. 2018, 10, 1403. [Google Scholar] [CrossRef]
- Hanssen, F.; Barton, D.N.; Nowell, M.; Cimburova, Z. Mapping Urban Tree Canopy Cover Using Airborne Laser Scanning. Applications to Urban Ecosystem Accounting for Oslo; Norsk Institutt for Naturforskning (NINA): Trondheim, Norway, 2019. [Google Scholar]
- Juel, A.; Groom, G.B.; Svenning, J.C.; Ejrnæs, R. Spatial Application of Random Forest Models for Fine-Scale Coastal Vegetation Classification Using Object Based Analysis of Aerial Orthophoto and DEM Data. Int. J. Appl. Earth Obs. Geoinf. 2015, 42, 106–114. [Google Scholar] [CrossRef]
- Yin, L.; Wang, Z. Measuring Visual Enclosure for Street Walkability: Using Machine Learning Algorithms and Google Street View Imagery. Appl. Geogr. 2016, 76, 147–153. [Google Scholar] [CrossRef]
- Wang, W.; Xiao, L.; Zhang, J.; Yang, Y.; Tian, P.; Wang, H.; He, X. Potential of Internet Street-View Images for Measuring Tree Sizes in Roadside Forests. Urban For. Urban Green. 2018, 35, 211–220. [Google Scholar] [CrossRef]
- Keralis, J.M.; Javanmardi, M.; Khanna, S.; Dwivedi, P.; Huang, D.; Tasdizen, T.; Nguyen, Q.C. Health and the Built Environment in United States Cities: Measuring Associations Using Google Street View-Derived Indicators of the Built Environment. BMC Public Health 2020, 20, 215. [Google Scholar] [CrossRef] [PubMed]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Zone | Method | n | TP | FP | FN | p (%) | r (%) | F1 (%) |
|---|---|---|---|---|---|---|---|---|
| 1 | GSV | 700 | 635 | 911 | 51 | 41.07 | 92.57 | 56.90 |
| ALS | 608 | 655 | 64 | 48.14 | 90.48 | 62.84 | ||
| GSV + GSV | 581 | 271 | 95 | 68.19 | 85.95 | 76.05 | ||
| GSV + ML | 581 | 304 | 95 | 65.65 | 85.95 | 74.44 | ||
| ALS + GSV | 542 | 146 | 141 | 78.78 | 79.36 | 79.07 | ||
| ALS + ML | 509 | 51 | 186 | 90.89 | 73.24 | 81.12 | ||
| 2 | GSV | 215 | 112 | 351 | 73 | 24.19 | 60.54 | 34.57 |
| ALS | 164 | 205 | 36 | 44.44 | 82.00 | 57.64 | ||
| GSV + GSV | 91 | 104 | 104 | 46.67 | 46.67 | 46.67 | ||
| GSV + ML | 98 | 120 | 92 | 44.95 | 51.58 | 48.04 | ||
| ALS + GSV | 102 | 66 | 103 | 60.71 | 49.76 | 54.69 | ||
| ALS + ML | 141 | 68 | 66 | 67.46 | 68.12 | 67.79 | ||
| 3 | GSV | 652 | 461 | 420 | 177 | 52.33 | 72.26 | 60.70 |
| ALS | 490 | 367 | 132 | 57.18 | 78.78 | 66.26 | ||
| GSV + GSV | 409 | 137 | 227 | 74.91 | 64.31 | 69.20 | ||
| GSV + ML | 421 | 142 | 221 | 74.78 | 65.58 | 69.88 | ||
| ALS + GSV | 421 | 87 | 219 | 82.87 | 65.78 | 73.34 | ||
| ALS + ML | 393 | 55 | 251 | 87.72 | 61.02 | 71.98 | ||
| 6 | GSV | 366 | 306 | 345 | 44 | 47.00 | 87.43 | 61.14 |
| ALS | 341 | 314 | 20 | 52.06 | 94.46 | 67.13 | ||
| GSV + GSV | 282 | 97 | 75 | 74.41 | 78.99 | 76.63 | ||
| GSV + ML | 278 | 102 | 77 | 73.16 | 78.31 | 75.65 | ||
| ALS + GSV | 308 | 82 | 52 | 78.97 | 85.56 | 82.13 | ||
| ALS + ML | 298 | 76 | 61 | 79.68 | 83.01 | 81.31 | ||
| 8 | GSV | 839 | 759 | 1228 | 54 | 38.20 | 93.36 | 54.21 |
| ALS | 772 | 718 | 50 | 51.81 | 93.92 | 66.78 | ||
| GSV + GSV | 707 | 358 | 105 | 66.38 | 87.07 | 75.33 | ||
| GSV + ML | 711 | 389 | 98 | 64.64 | 87.89 | 74.49 | ||
| ALS + GSV | 707 | 270 | 113 | 72.36 | 86.22 | 78.69 | ||
| ALS + ML | 612 | 207 | 217 | 74.73 | 73.82 | 74.27 | ||
| mean zones | GSV | 2.772 | 2.273 | 3.255 | 399 | 41.12 | 85.07 | 55.44 |
| ALS | 2.375 | 1.541 | 252 | 50.99 | 86.42 | 64.13 | ||
| GSV + GSV | 2.070 | 967 | 606 | 68.16 | 77.35 | 72.47 | ||
| GSV + ML | 2.089 | 1.057 | 583 | 66.40 | 78.18 | 71.81 | ||
| ALS + GSV | 2.080 | 651 | 628 | 76.16 | 76.81 | 76.48 | ||
| ALS + ML | 1.953 | 457 | 781 | 81.04 | 71.43 | 75.93 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rodríguez-Puerta, F.; Barrera, C.; García, B.; Pérez-Rodríguez, F.; García-Pedrero, A.M. Mapping Tree Canopy in Urban Environments Using Point Clouds from Airborne Laser Scanning and Street Level Imagery. Sensors 2022, 22, 3269. https://doi.org/10.3390/s22093269
Rodríguez-Puerta F, Barrera C, García B, Pérez-Rodríguez F, García-Pedrero AM. Mapping Tree Canopy in Urban Environments Using Point Clouds from Airborne Laser Scanning and Street Level Imagery. Sensors. 2022; 22(9):3269. https://doi.org/10.3390/s22093269
Chicago/Turabian StyleRodríguez-Puerta, Francisco, Carlos Barrera, Borja García, Fernando Pérez-Rodríguez, and Angel M. García-Pedrero. 2022. "Mapping Tree Canopy in Urban Environments Using Point Clouds from Airborne Laser Scanning and Street Level Imagery" Sensors 22, no. 9: 3269. https://doi.org/10.3390/s22093269
APA StyleRodríguez-Puerta, F., Barrera, C., García, B., Pérez-Rodríguez, F., & García-Pedrero, A. M. (2022). Mapping Tree Canopy in Urban Environments Using Point Clouds from Airborne Laser Scanning and Street Level Imagery. Sensors, 22(9), 3269. https://doi.org/10.3390/s22093269