
DDPG-Based Throughput Optimization with AoI Constraint in Ambient Backscatter-Assisted Overlay CRN


Abstract
:1. Introduction
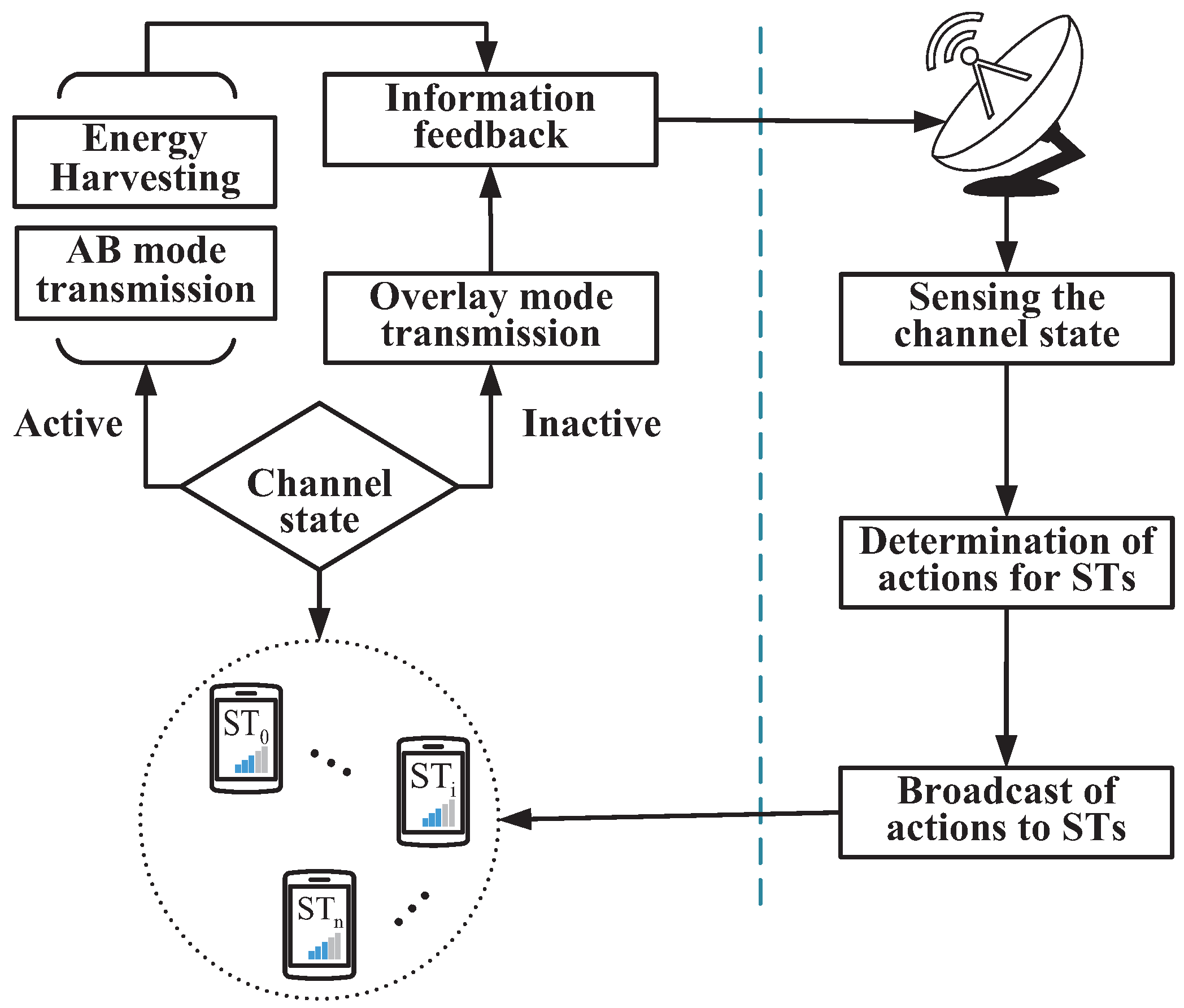
- In order to achieve the long-term throughput optimization of the secondary network with the AoI constraint, we utilize deep deterministic policy gradient (DDPG), a DRL based on the policy gradient, to find the optimal policy for jointly managing time and energy of STs. Considering the impacts of time and energy allocation on the reward when the AoI constraint can not be satisfied, we develop the corresponding reward functions with respect to the channel states.
- We analyze the minimum throughput requirement and the maximum allowable AoI for the throughput and AoI performances in the ABO-CRN, ABCs, and CRNs.
- We introduce throughput-optimal (T-O) and AoI-optimal (A-O) baseline schemes as comparisons for the throughput optimization with the AoI constraint. The simulation results show that the throughput of the ABO-CRN is close to the optimal throughput of the T-O baseline scheme, and the AoI of the ABO-CRN is close to the optimal AoI of the A-O baseline scheme.
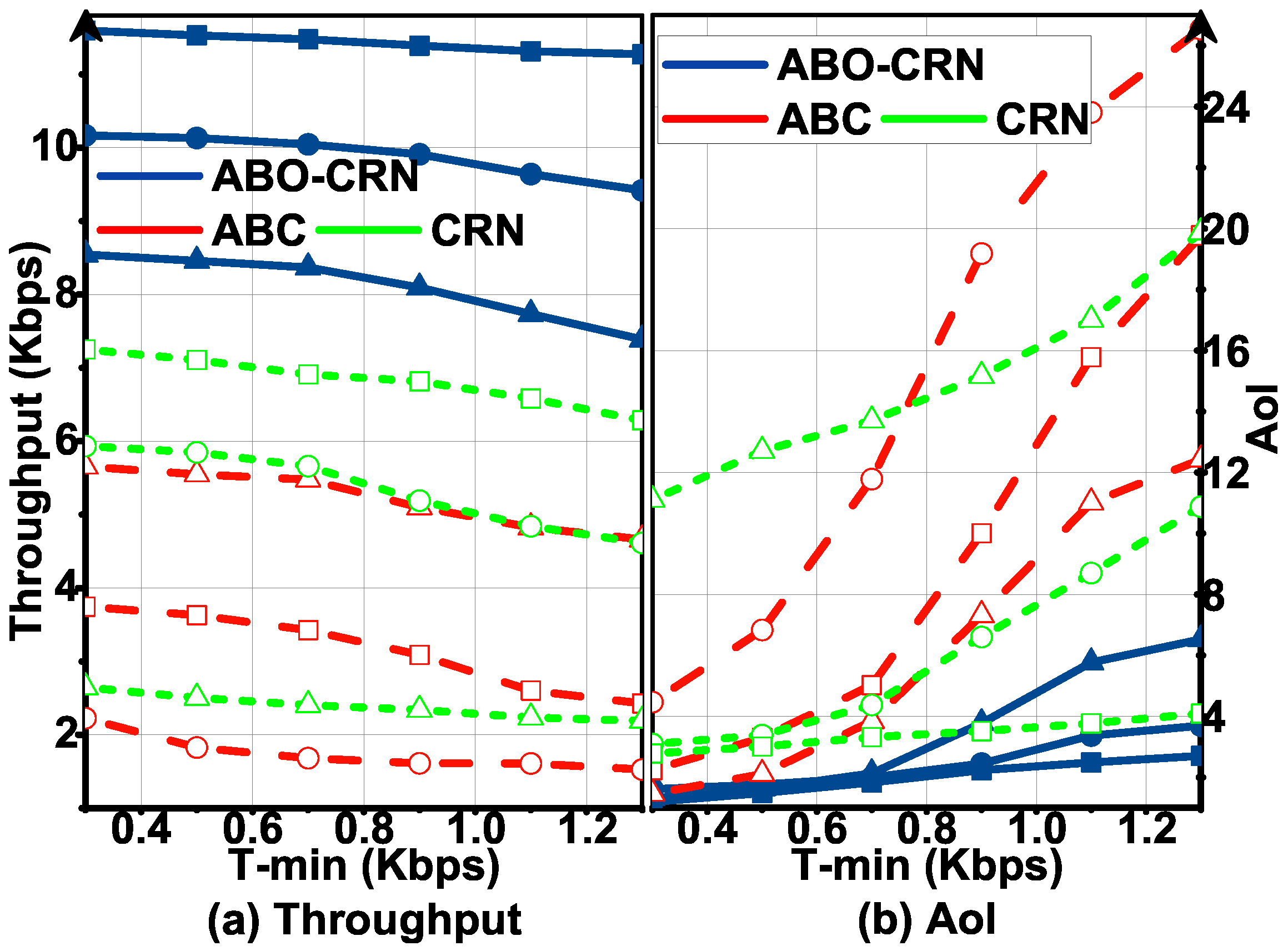
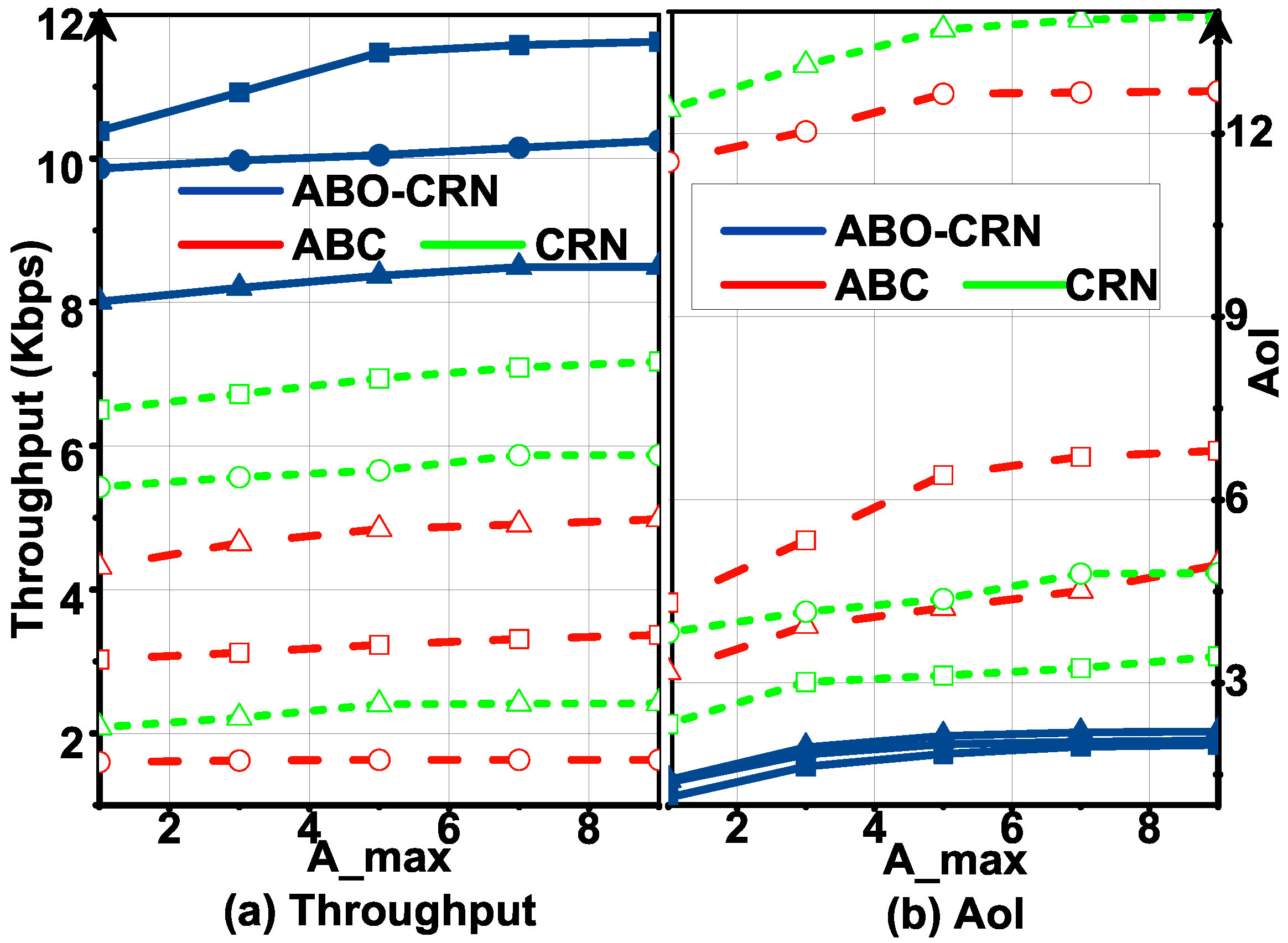
- We evaluate the impacts of the minimum throughput requirement and maximum allowable AoI on the throughput and AoI performances of the secondary networks in the ABO-CRN, ABCs, and CRNs, and demonstrate that the ABO-CRN improves the throughput and AoI performances of the ABCs and CRNs.
2. System Model
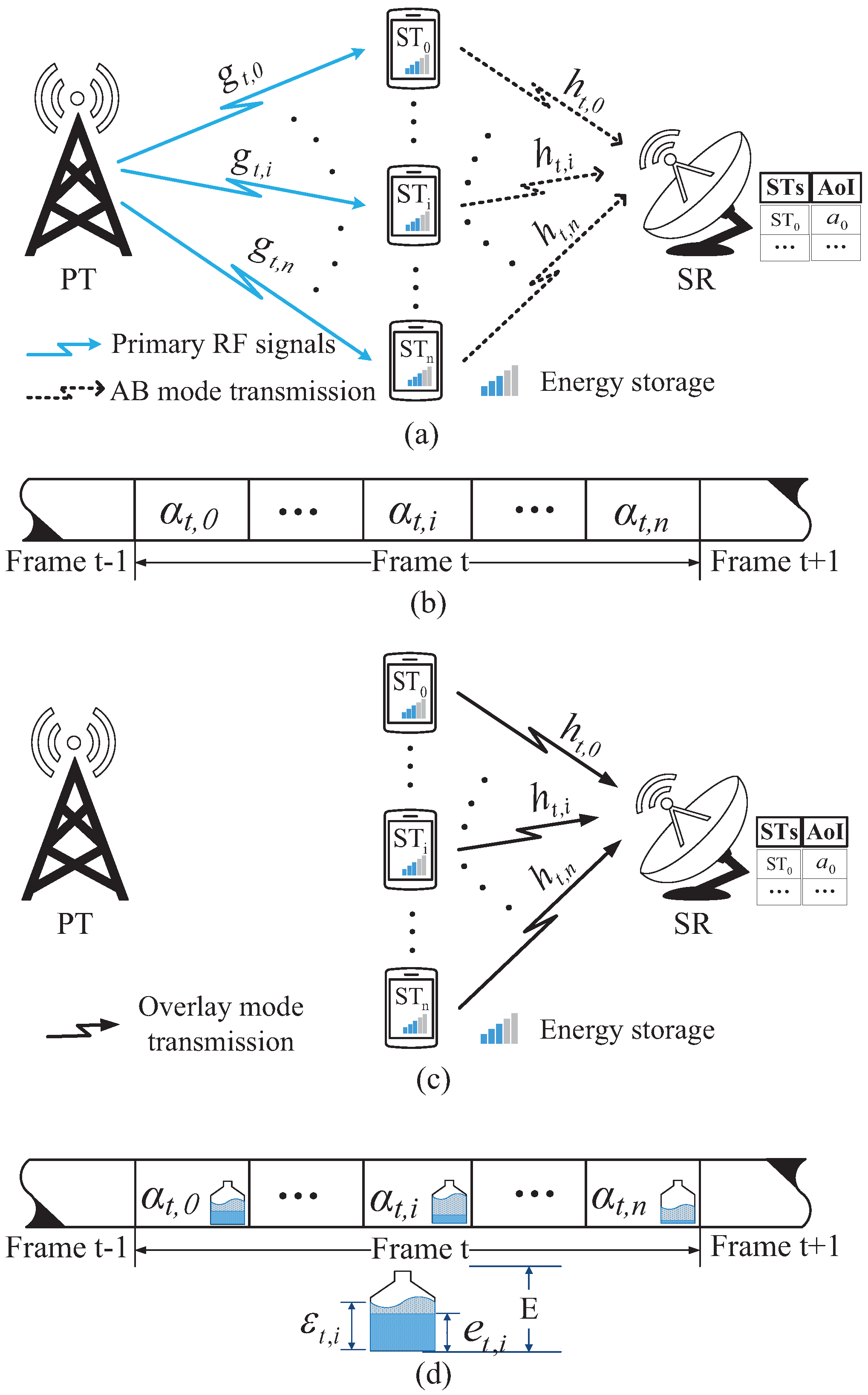
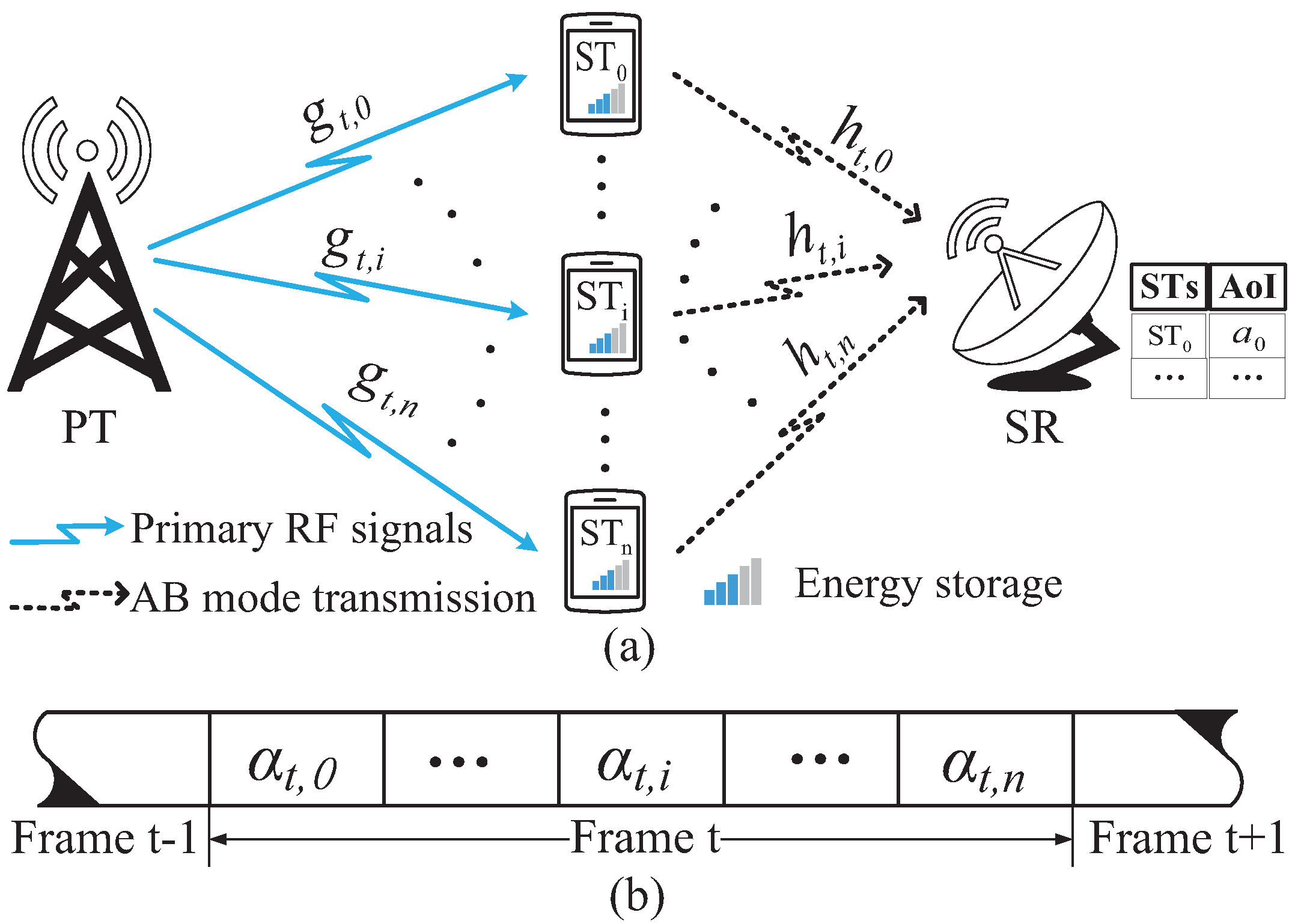
2.1. Structures and Channel Models
2.2. Network Models
2.2.1. Network Model of ABO-CRN
2.2.2. Network Model of ABCs
2.2.3. Network Model of CRNs
3. Formulation and Analysis of the Problem
3.1. Throughput Definition
3.1.1. Throughput Definition of ABO-CRN
3.1.2. Throughput Definition of ABCs
3.1.3. Throughput Definition of CRNs
3.2. Definition of AoI
3.3. Problem Formulation
3.4. Analysis of and
4. Policies of Time and Energy Management
4.1. Definitions of Spaces and Rewards
4.1.1. State Space
4.1.2. Action Space
4.1.3. Rewards
4.2. Time and Energy Management by DDPG
| Algorithm 1: Finding the optimal policy for the time and energy management by DDPG. |
 |
5. Simulation
6. Conclusions
- Throughput of the ABO-CRN is close to the optimal throughput of T-O baseline scheme, and the AoI of the ABO-CRN is close to the optimal AoI of A-O baseline scheme. DDPG finds the optimal policy of time and energy management to optimize the throughput, and satisfies the AoI constraint at the same time.
- Throughput of the ABO-CRN is higher than that of A-O baseline scheme, and AoI of the ABO-CRN is lower than that of T-O baseline scheme. The observation validates the benefit of considering both throughput and AoI performances over only one metric.
- The ABO-CRN improves the throughput and AoI performances of the ABCs and CRNs. Even in extreme cases, such as the long time active channel state, the ABO-CRN obtains better throughput and AoI performances than the ABCs and CRNs.
- The lower bound of the maximum allowable AoI that makes STs satisfy the AoI constraint decreases with the total number of STs, and increases with the number of STs whose average throughput is smaller than the minimum throughput requirement.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| RF | Radio frequency |
| CR | Cognitive radio |
| CRN | CR network |
| AB | Ambient backscatter |
| ABC | AB communication |
| AB-CRN | AB-assisted CRN |
| ABO-CRN | AB-assisted overlay CRN |
| ABU-CRN | AB-assisted underlay CRN |
| DRL | Deep reinforcement learning |
| DDPG | Deep deterministic policy gradient |
| AoI | Age of information |
| PU | Primary user |
| PT | Primary transmitter |
| PR | Primary receiver |
| SU | Secondary user |
| ST | Secondary transmitter |
| SR | Secondary receiver |
References
- Liu, X.; Zheng, K.; Chi, K.; Zhu, Y. Cooperative spectrum sensing optimization in energy-harvesting cognitive radio networks. IEEE Trans. Wirel. Commun. 2020, 19, 7663–7676. [Google Scholar] [CrossRef]
- Zheng, K.; Liu, X.; Zhu, Y.; Chi, K.; Liu, K. Total throughput maximization of cooperative cognitive radio networks with energy harvesting. IEEE Trans. Wirel. Commun. 2019, 19, 533–546. [Google Scholar] [CrossRef]
- Siegel, J.E.; Kumar, S.; Sarma, S.E. The future Internet of Things: Secure, efficient, and model-based. IEEE Internet Things J. 2018, 5, 2386–2398. [Google Scholar] [CrossRef] [Green Version]
- Zhang, S.; Kong, S.; Chi, K.; Huang, L. Energy management for secure transmission in wireless powered communication networks. IEEE Internet Things J. 2021, 9, 1171–1181. [Google Scholar] [CrossRef]
- Niyato, D.; Kim, D.I.; Han, Z.; Maso, M. Wireless powered communication networks: Architectures, protocol designs, and standardization. IEEE Wirel. Commun. 2016, 23, 8–9. [Google Scholar] [CrossRef]
- Chi, K.; Zhu, Y.; Li, Y.; Huang, L.; Xia, M. Minimization of transmission completion time in wireless powered communication networks. IEEE Internet Things J. 2017, 4, 1671–1683. [Google Scholar] [CrossRef]
- Yang, L.; Zhou, Y.J.; Zhang, C.; Zhang, X.; Yang, X.; Tan, C. Compact multiband wireless energy harvesting based battery-free body area networks sensor for mobile healthcare. IEEE J. Electromagn. Microw. Med. Biol. 2018, 2, 109–115. [Google Scholar] [CrossRef]
- Chi, K.; Chen, Z.; Zheng, K.; Zhu, Y.H.; Liu, J. Energy provision minimization in wireless powered communication networks with network throughput demand: TDMA or NOMA. IEEE Trans. Commun. 2019, 67, 6401–6414. [Google Scholar] [CrossRef]
- Hoang, T.M.; El Shafie, A.; da Costa, D.B.; Duong, T.; Tuan, H.; Marshall, A. Security and energy harvesting for MIMO-OFDM networks. IEEE Trans. Commun. 2019, 68, 2593–2606. [Google Scholar] [CrossRef] [Green Version]
- Azarhava, H.; Musevi Niya, J. Energy efficient resource allocation in wireless energy harvesting sensor networks. IEEE Wirel. Commun. Lett. 2020, 9, 1000–1003. [Google Scholar] [CrossRef]
- Ghosh, D.; Hanawal, M.K.; Zlatanov, N. Learning to optimize energy efficiency in energy harvesting wireless sensor networks. IEEE Wirel. Commun. Lett. 2021, 10, 1153–1157. [Google Scholar] [CrossRef]
- Gu, Z.; Shen, T.; Wang, Y.; Lau, F.C.M. Efficient rendezvous for heterogeneous interference in cognitive radio networks. IEEE Trans. Wirel. Commun. 2020, 19, 91–105. [Google Scholar] [CrossRef]
- Sangdeh, P.K.; Pirayesh, H.; Quadri, A.; Zeng, H. A practical spectrum sharing scheme for cognitive radio networks: Design and experiments. IEEE/ACM Trans. Netw. 2020, 28, 1818–1831. [Google Scholar] [CrossRef]
- Zheng, K.; Liu, X.; Liu, X.; Zhu, Y. Hybrid overlay-underlay cognitive radio networks with energy harvesting. IEEE Trans. Commun. 2019, 67, 4669–4682. [Google Scholar] [CrossRef]
- Papadopoulos, A.; Chatzidiamantis, N.D.; Georgiadis, L. Network coding techniques for primary-secondary user cooperation in cognitive radio networks. IEEE Trans. Wirel. Commun. 2020, 19, 4195–4208. [Google Scholar] [CrossRef]
- Rathee, G.; Jaglan, N.; Garg, S.; Choi, B.J.; Choo, K.K.R. A secure spectrum handoff mechanism in cognitive radio networks. IEEE Trans. Cogn. Commun. Netw. 2020, 6, 959–969. [Google Scholar] [CrossRef]
- Hoang, D.T.; Niyato, D.; Kim, D.I.; Van Huynh, N.; Gong, S. Ambient Backscatter Communication Networks, 1st ed.; Cambridge University Press: Cambridge, UK, 2020; pp. 18–93. [Google Scholar]
- Liu, V.; Parks, A.; Talla, V.; Gollakota, S.; Wetherall, D.; Smith, J.R. Ambient backscatter: Wireless communication out of thin air. ACM SIGCOMM Comput. Commun. Rev. 2013, 43, 39–50. [Google Scholar] [CrossRef]
- Ye, Y.; Shi, L.; Chu, X.; Lu, G. On the outage performance of ambient backscatter communications. IEEE Internet Things J. 2020, 7, 7265–7278. [Google Scholar] [CrossRef]
- Liu, W.; Shen, S.; Tsang, D.H.; Murch, R. Enhancing ambient backscatter communication utilizing coherent and non-coherent space-time codes. IEEE Trans. Wirel. Commun. 2022, 20, 6884–6897. [Google Scholar] [CrossRef]
- Madavani, F.K.; Soleimanpour-Moghadam, M.; Talebi, S.; Chatzinotas, S.; Ottersten, B. Joint resource allocation for full-duplex ambient backscatter communication: A difference convex algorithm. IEEE Trans. Wirel. Commun. 2022, in press. [Google Scholar] [CrossRef]
- Hoang, D.T.; Niyato, D.; Wang, P.; Kim, D.I.; Han, Z. Ambient backscatter: A new approach to improve network performance for RF-powered cognitive radio networks. IEEE Trans. Commun. 2017, 65, 3659–3674. [Google Scholar] [CrossRef]
- Zhuang, Y.; Li, X.; Ji, H.; Zhang, H.; Leung, V.C.M. Optimal resource allocation for RF-powered underlay cognitive radio networks with ambient backscatter communication. IEEE Trans. Veh. Technol. 2020, 69, 15216–15228. [Google Scholar] [CrossRef]
- Zhu, K.; Xu, L.; Niyato, D. Distributed resource allocation in RF-powered cognitive ambient backscatter networks. IEEE Trans. Green Commun. Netw. 2021, 5, 1657–1668. [Google Scholar] [CrossRef]
- Kaul, S.; Yates, R.; Gruteser, M. Real-time status: How often should one update. In Proceedings of the IEEE INFOCOM, Orlando, FL, USA, 25–30 March 2012. [Google Scholar]
- Leng, S.; Yener, A. Age of information minimization for an energy harvesting cognitive radio. IEEE Trans. Cogn. Commun. Netw. 2019, 5, 427–439. [Google Scholar] [CrossRef]
- Gu, Y.; Chen, H.; Zhai, C.; Li, Y.; Vucetic, B. Minimizing age of information in cognitive radio-based IoT systems: Underlay or overlay? IEEE Internet Things J. 2019, 6, 10273–10288. [Google Scholar] [CrossRef] [Green Version]
- Wang, Q.; Chen, H.; Gu, Y.; Li, Y.; Vucetic, B. Minimizing the age of information of cognitive radio-based IoT systems under a collision constraint. IEEE Trans. Wirel. Commun. 2020, 19, 8054–8067. [Google Scholar] [CrossRef]
- Abbas, Q.; Zeb, S.; Hassan, S.A. Wireless-Powered Backscatter Communications for Internet of Things, 1st ed.; Springer International Publishing: Cham, Switzerland, 2021; pp. 67–80. [Google Scholar]
- Sutton, G.J.; Zeng, J.; Liu, R.P.; Ni, W.; Nguyen, D.N.; Jayawickrama, B.A.; Huang, X.; Abolhasan, M.; Zhang, Z.; Dutkiewicz, E.; et al. Enabling technologies for ultra-reliable and low latency communications: From PHY and MAC layer perspectives. IEEE Commun. Surv. Tuts. 2019, 21, 2488–2524. [Google Scholar] [CrossRef]
- Rajaraman, N.; Vaze, R.; Reddy, G. Not just age but age and quality of information. IEEE J. Sel. Area Commun. 2021, 39, 1325–1338. [Google Scholar] [CrossRef]
- Liu, Q.; Zeng, H.; Chen, M. Minimizing age-of-information with throughput requirements in multi-path network communication. In Proceedings of the Twentieth ACM International Symposium on Mobile Ad Hoc Networking and Computing, New York, NY, USA, 2 July 2019. [Google Scholar]
- Kadota, I.; Sinha, A.; Modiano, E. Scheduling algorithms for optimizing age of information in wireless networks with throughput constraints. IEEE/ACM Trans. Netw. 2019, 27, 1359–1372. [Google Scholar] [CrossRef]
- Bhat, R.V.; Vaze, R.; Motani, M. Throughput maximization with an average age of information constraint in fading channels. IEEE Trans. Commun. 2021, 20, 481–494. [Google Scholar] [CrossRef]
- Luong, N.; Hoang, D.; Gong, S.; Niyato, D.; Wang, P.; Liang, Y.; Kim, D.I. Applications of deep reinforcement learning in communications and networking: A survey. IEEE Commun. Surv. Tuts. 2019, 21, 3133–3174. [Google Scholar] [CrossRef] [Green Version]
- Zhu, B.; Chi, K.; Liu, J.; Yu, K.; Mumtaz, S. Efficient offloading for minimizing task computation delay of NOMA-based multi-access edge computing. IEEE Trans. Commun. 2022, in press. [Google Scholar] [CrossRef]
- Wei, Y.; Yu, F.; Song, M.; Han, Z. User scheduling and resource allocation in hetNets with hybrid energy supply: An actor-critic reinforcement learning approach. IEEE Trans. Wirel. Commun. 2018, 17, 680–692. [Google Scholar] [CrossRef]
- Lillicrap, T.P.; Hunt, J.J.; Pritzel, A.; Heess, N.; Erez, T.; Tassa, Y.; Silver, D.; Wierstra, D. Continuous control with deep reinforcement learning. In Proceedings of the ICLR, San Juan, Puerto Rico, 2–4 May 2016. [Google Scholar]
- Yan, Z.; Chen, S.; Zhang, X.; Liu, H. Outage performance analysis of wireless energy harvesting relay-assisted random underlay cognitive networks. IEEE Internet Things J. 2018, 5, 2691–2699. [Google Scholar] [CrossRef]
- Huynh, N.V.; Hoang, D.T.; Nguyen, D.N.; Dutkiewicz, E.; Niyato, D.; Wang, P. Reinforcement learning approach for RF-powered cognitive radio network with ambient backscatter. In Proceedings of the IEEE Global Communications Conference (GLOBECOM), Abu Dhabi, United Arab Emirates, 9–13 December 2018. [Google Scholar]
- Taricco, G. On the convergence of multipath fading channel gains to the rayleigh distribution. IEEE Wirel. Commun. Lett. 2015, 4, 549–552. [Google Scholar] [CrossRef] [Green Version]
- Ioffe, S.; Szegedy, C. Batch normalization: Accelerating deep network training by reducing internal covariate shift. In Proceedings of the PMLR, Lille, France, 7–9 July 2015. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Scenario | Metric | Limitations |
|---|---|---|
| CRNs | Throughput [14,15], AoI [26,27,28] | Short-term optimization [14,15,27], single ST [14,15,26,27,28], single metric optimization, single resource management [14,15,26,27]. |
| ABCs | Outage probability [19], backscatter efficiency [20], throughput [21], AoI [29] | Short-term optimization, single resource management [19,20,21], single metric optimization [19,20,21,29] |
| AB-CRNs | Throughput [22,23], coverage probability [24] | Short-term optimization [22,23], single ST [22,23,26], single metric optimization [22,23,24], single resource management [22,23]. |
| Parameter | Description |
|---|---|
| n | The number of STs is n + 1 |
| The channel state in frame t | |
| The probability of the active channel state | |
| E | The capacity of rechargeable capacitor |
| The allocated energy for overlay mode transmission of ST | |
| The available energy of ST in frame t | |
| The duration of data transmission by ST in frame t | |
| The total throughput of secondary network in frame t | |
| The throughput of ST in frame t | |
| The throughput of STs by AB mode transmission | |
| The throughput of STs by overlay mode transmission | |
| The minimum throughput requirement for each ST | |
| W | The bandwidth |
| The transmit power of the PT | |
| The channel gain from the PT to ST in frame t | |
| The channel gain from ST to gateway in frame t | |
| The backscatter reflection coefficient | |
| The variance of AWGN | |
| The AoI of ST in frame t | |
| The maximum allowable AoI |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jia, X.; Zheng, K.; Chi, K.; Liu, X. DDPG-Based Throughput Optimization with AoI Constraint in Ambient Backscatter-Assisted Overlay CRN. Sensors 2022, 22, 3262. https://doi.org/10.3390/s22093262
Jia X, Zheng K, Chi K, Liu X. DDPG-Based Throughput Optimization with AoI Constraint in Ambient Backscatter-Assisted Overlay CRN. Sensors. 2022; 22(9):3262. https://doi.org/10.3390/s22093262
Chicago/Turabian StyleJia, Xueli, Kechen Zheng, Kaikai Chi, and Xiaoying Liu. 2022. "DDPG-Based Throughput Optimization with AoI Constraint in Ambient Backscatter-Assisted Overlay CRN" Sensors 22, no. 9: 3262. https://doi.org/10.3390/s22093262
APA StyleJia, X., Zheng, K., Chi, K., & Liu, X. (2022). DDPG-Based Throughput Optimization with AoI Constraint in Ambient Backscatter-Assisted Overlay CRN. Sensors, 22(9), 3262. https://doi.org/10.3390/s22093262