1. Introduction
Information on water depth and seabed topography can contribute to improving the safety of maritime transport and to the development of other maritime industries, including the offshore sector. Hydrographic surveying is done systematically all over the world to prepare data for nautical charts, electronic navigation systems, and other databases used in the management of hydrospace and maritime infrastructure. The airborne laser bathymetry (ALB) technique can be a valuable addition to Multibeam Echosounders (MBES) or perhaps an alternative in shallow waters. It has proven to be a large-scale, accurate, rapid, safe, and versatile approach for surveying shallow waters and coastlines where sonar systems are ineffective or impossible to use [
1,
2,
3,
4]. Research has shown that ALB can identify similar seafloor features such as MBES systems [
5]. However, additional improvements must be done to separate the LiDAR seafloor intensity data from the depth component of the signal waveform. Receiving bathymetric lidar data with unassigned point classes or inaccurate point classification that may not meet industrial or research requirements is not unusual [
6]. Studies that have used ALB for depth determination and object detection primarily point to challenges in classifying the resulting point cloud into three basic groups: bottom, water surface, and bottom objects. These issues can be overcome using well-recognized machine learning classification methods.
The main goal of this study is to increase the accuracy of the classification of point clouds measured by an ALB scanner to improve seabed modeling and object detection.
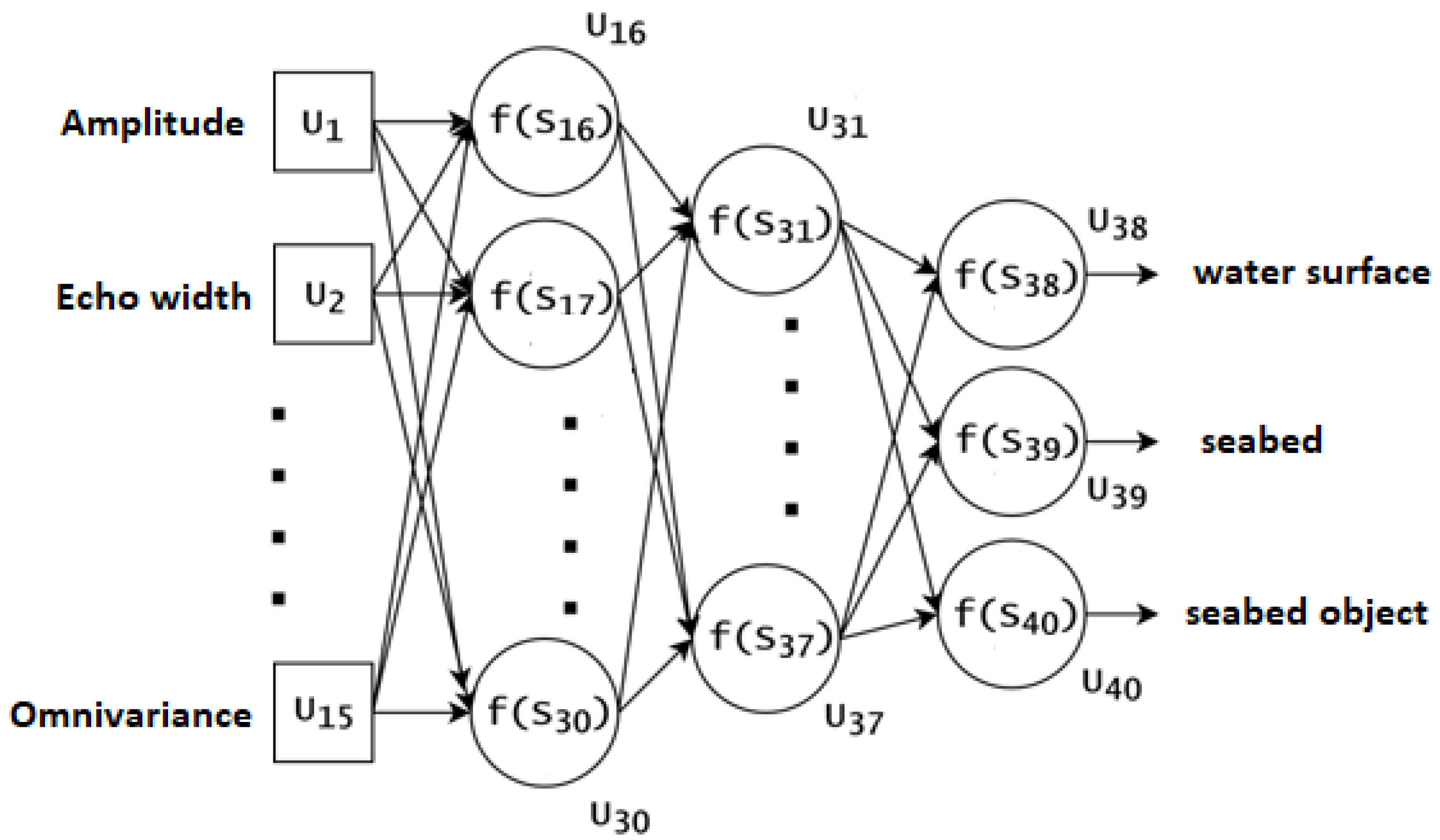
This paper can be considered a novel input to the ALB classification of point clouds with the use of imbalanced learning. To achieve the goal, the study evaluated Multi-Layer Perceptron (MLP) Artificial Neural Network (ANN) with the softmax activation function employing over 50 variants of the oversampling techniques for imbalanced learning. The results confirmed that data balancing had a quantitative impact on classification accuracy, allowing enhanced detection of seabed and bottom based on the ALB data. The classification results indicated that the best overall classification accuracy achieved varied from 95.8% to 97.0% depending on the oversampling algorithm used and was significantly better than the classification accuracy obtained for unbalanced data and data with downsampling (89.6% and 93.5%, respectively). Some of the algorithms allow for 10% increased detection of points on the objects compared to unbalanced data or data with simple downsampling. This study did not develop a new data balancing method or enhance the existing ones.
The classification accuracy of point clouds of all the classes is influenced by class distribution. According to the scanned area in the majority, the laser scanning data are unbalanced, and therefore require remodeling. The ALB data set of shallow waters comprises data on the seabed and a small percentage of data on underrepresented seabed objects. This application necessitates a high rate of accurate detection in the minority class (seabed objects) and a low rate of mistakes in the majority class (seabed or water surface). Different oversampling methods have been analyzed to address this concern [
7]. Archaeologists focusing on detecting former field systems from LiDAR data in their research recommend the use of the Synthetic Minority Oversampling Technique (SMOTE) for achieving better results [
8]. Balancing the training data for automatic mapping of high-voltage power lines based on the LiDAR data led to an almost 10% increase in accuracy in comparison to imbalanced data [
9]. Landslide prediction research based on a set of geomorphological factors revealed that the Support Vector Machine (SVM) model yielded the highest accuracy with the SMOTE data balancing method [
10]. The supporting synthetic samples were used in the classification of bottom materials (sand, stones, rocks) performed using ALB. The obtained results were promising but were specific for particular classes [
11]. A study on the application of SMOTE for balancing data distribution with land cover mapping using LiDAR data showed increased detection accuracy. The challenges associated with imbalanced classes and low density of LiDAR point clouds in urban areas were also satisfactorily resolved by applying several oversampling methods for the classification and extraction of roof superstructures [
12]. Due to its proven advantages in classification, the present study used SMOTE, a method for producing synthetic new data from existing ones, which provided new information and variations to synthetically generated data.
The paper is organized as follows:
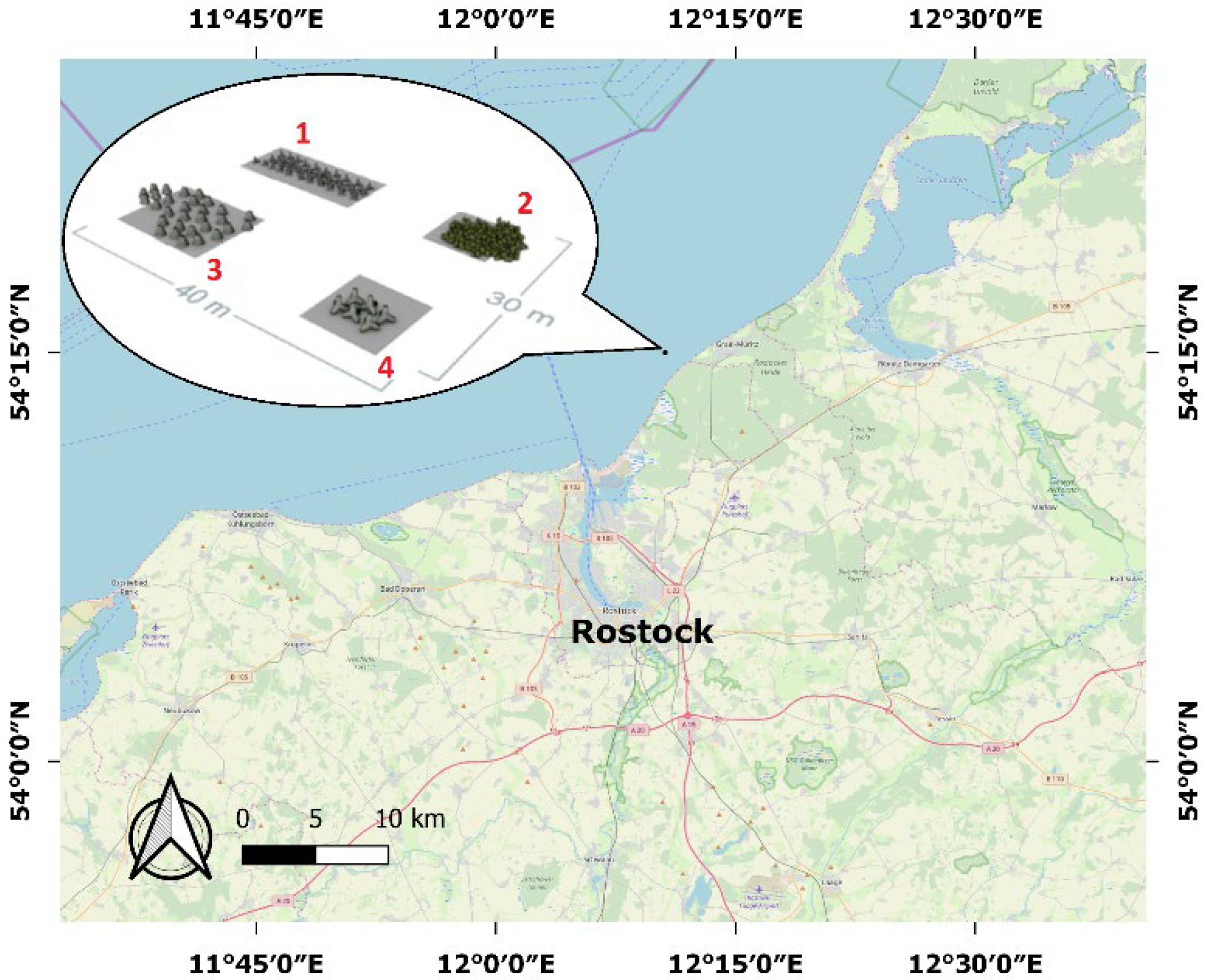
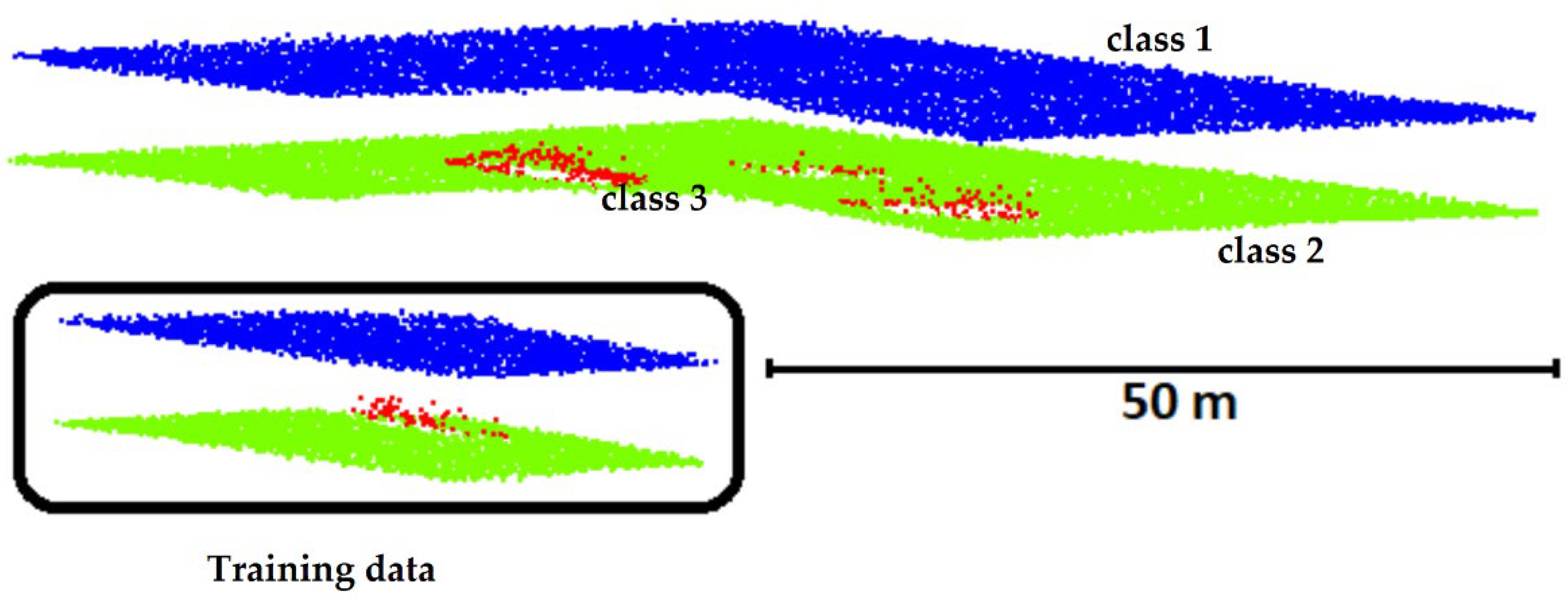
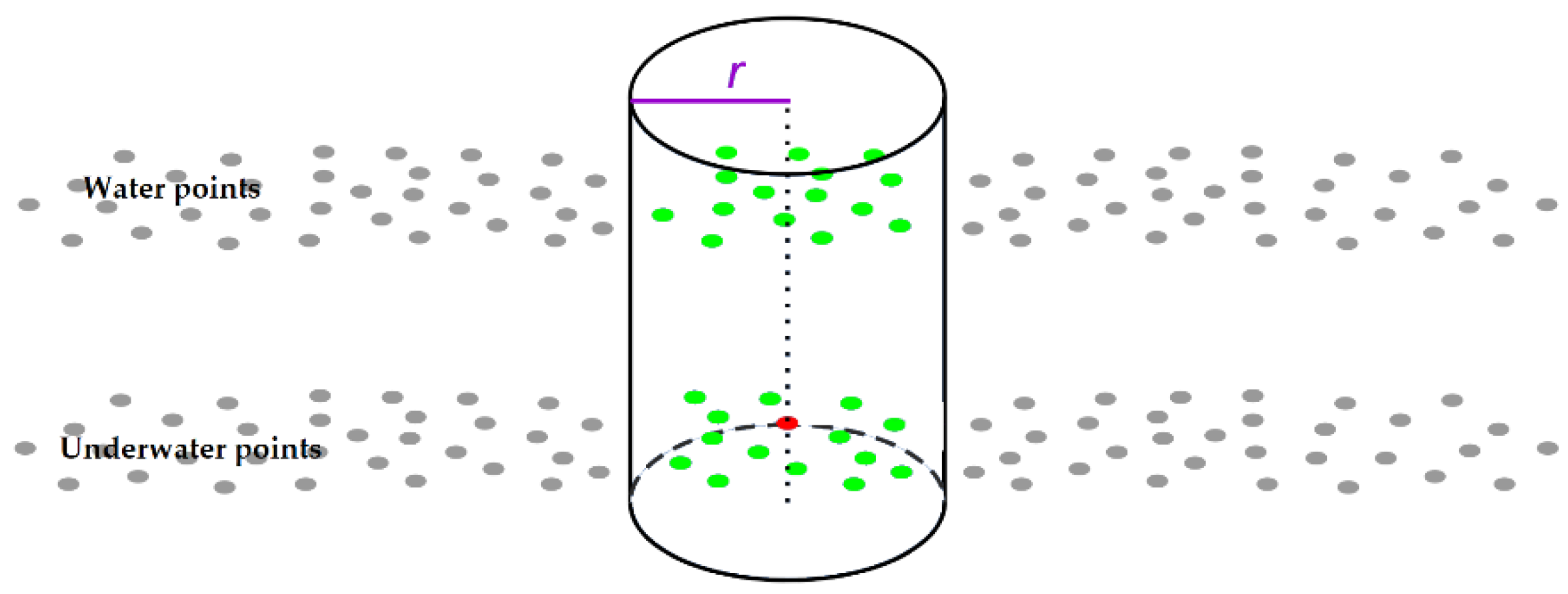
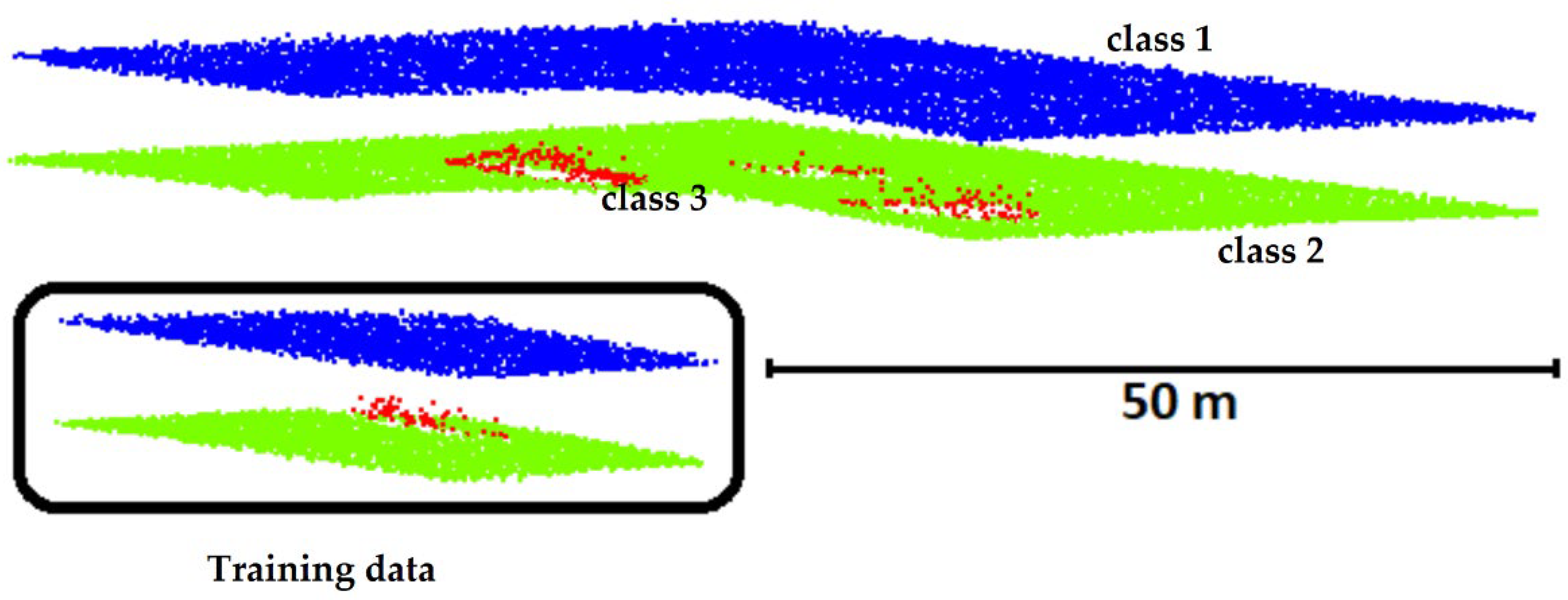
Section 2 describes the test area and ALB data with features and architecture of ANN.
Section 3 presents the results obtained with the proposed approach and a discussion. Finally,
Section 4 presents our conclusions.
3. Results and Discussion
The proposed approach was tested for each oversampling method by training the MLP neural network. A random starting point was used in error back-propagation. Consequently, the training procedure was repeated 11 times to obtain reliable results. After completion of each iteration, the data were tested with the dataset, which initially contained 10,612 water surface points, 13,318 seabed points, and 212 seabed object points. The results of the tests are presented in
Table 3. The first two columns in the table present the names of oversampling algorithms and the year they were introduced. The next four columns show the best, worst, mean and median values of overall classification accuracy. The last four columns present the number of vectors used for training the MLP neural network.
The overall classification accuracy (
Ac [%]) was calculated using the following formula:
where
corw is the number of input vectors successfully identified as “water surface” in class 1,
cors is the number of input vectors successfully identified as “seabed” in class 2,
coro is the number of input vectors successfully identified as “seabed object” in class 3, and
all{w,s,o} is the total number of vectors in classes 1–3.
The best overall classification accuracy of 97.0% was achieved for the LVQ SMOTE (Learning Vector Quantization based SMOTE) algorithm. The oversampling method generated synthetic samples using codebooks obtained by learning vector quantization [
16]. The second algorithm with about 96% overall classification accuracy was ROSE (Random OverSampling Examples). This algorithm works based on smoothed bootstrap resampling from data [
17]. The next algorithm with the best results was PDFOS (Probability Density Function Over-Sampling), and its overall classification accuracy was about 95.8%. This algorithm generated synthetic instances as additional training data based on the estimated probability density function [
18].
Table 3.
Results of classification with balanced learning.
Table 3.
Results of classification with balanced learning.
| | Name | Year | Best | Worst | Mean | Median | All Vectors | Class 1 | Class 2 | Class 3 |
|---|
| 1 | SMOTE [7] | 2002 | 93.4 | 91.5 | 92.7 | 92.9 | 10,188 | 3396 | 3396 | 3396 |
| 2 | SMOTE + Tomek [19] | 2004 | 93.0 | 91.9 | 92.6 | 92.6 | 10,135 | 3396 | 3396 | 3343 |
| 3 | SMOTE + ENN [19] | 2004 | 93.5 | 90.6 | 92.2 | 92.1 | 9990 | 3396 | 3396 | 3198 |
| 4 | Borderline-SMOTE1 [20] | 2005 | 93.3 | 91.5 | 92.2 | 92.1 | 9191 | 2729 | 3396 | 3066 |
| 5 | Borderline-SMOTE2 [20] | 2005 | 95.4 | 93.4 | 94.7 | 94.8 | 9191 | 2729 | 3396 | 3066 |
| 6 | SMOTE + LLE [21] | 2006 | 91.1 | 88.2 | 89.7 | 89.7 | 10,188 | 3396 | 3396 | 3396 |
| 7 | Distance-SMOTE [22] | 2007 | 93.5 | 91.9 | 92.5 | 92.5 | 10,188 | 3396 | 3396 | 3396 |
| 8 | Polynomial-SMOTE [23] | 2008 | 91.0 | 88.7 | 90.3 | 90.4 | 13,234 | 5458 | 3396 | 4380 |
| 9 | ADOMS [24] | 2008 | 94.2 | 91.4 | 93.3 | 93.5 | 10,188 | 3396 | 3396 | 3396 |
| 10 | Safe Level SMOTE [25] | 2009 | 66.7 | 66.7 | 66.7 | 66.7 | 6573 | 2729 | 3396 | 448 |
| 11 | MSMOTE [26] | 2009 | 94.1 | 92.0 | 92.9 | 92.9 | 10,188 | 3396 | 3396 | 3396 |
| 12 | SMOBD [27] | 2011 | 95.0 | 92.7 | 93.3 | 93.0 | 10,188 | 3396 | 3396 | 3396 |
| 13 | SVM balance [28] | 2012 | 94.2 | 91.9 | 92.7 | 92.5 | 10,172 | 3396 | 3396 | 3380 |
| 14 | TRIM SMOTE [29] | 2012 | 92.4 | 91.5 | 92.0 | 92.0 | 10,188 | 3396 | 3396 | 3396 |
| 15 | SMOTE RSB [30] | 2012 | 81.7 | 66.7 | 71.4 | 67.6 | 7716 | 3396 | 3396 | 924 |
| 16 | ProWSyn [31] | 2013 | 93.6 | 90.6 | 92.4 | 92.5 | 10,188 | 3396 | 3396 | 3396 |
| 17 | SL graph SMOTE [32] | 2013 | 92.1 | 91.1 | 91.6 | 91.6 | 9191 | 2729 | 3396 | 3066 |
| 18 | NRSBoundary SMOTE [33] | 2013 | 92.6 | 91.4 | 91.8 | 91.8 | 9191 | 2729 | 3396 | 3066 |
| 19 | LVQ SMOTE [16] | 2013 | 97.0 | 94.7 | 96.3 | 96.7 | 10,188 | 3396 | 3396 | 3396 |
| 20 | ROSE [17] | 2014 | 96.0 | 92.5 | 94.6 | 95.0 | 10,188 | 3396 | 3396 | 3396 |
| 21 | SMOTE OUT [34] | 2014 | 93.5 | 91.2 | 92.2 | 92.1 | 10,188 | 3396 | 3396 | 3396 |
| 22 | SMOTE Cosine [34] | 2014 | 93.2 | 89.6 | 91.2 | 90.9 | 10,188 | 3396 | 3396 | 3396 |
| 23 | Selected SMOTE [34] | 2014 | 94.9 | 92.7 | 93.6 | 93.6 | 10,188 | 3396 | 3396 | 3396 |
| 24 | LN SMOTE [35] | 2011 | 94.4 | 66.7 | 86.3 | 93.5 | 9282 | 3396 | 3396 | 2490 |
| 25 | MWMOTE [36] | 2014 | 91.5 | 90.4 | 91.0 | 91.0 | 10,188 | 3396 | 3396 | 3396 |
| 26 | PDFOS [18] | 2014 | 95.8 | 92.9 | 94.6 | 94.7 | 10,188 | 3396 | 3396 | 3396 |
| 27 | RWO sampling [37] | 2014 | 93.0 | 88.6 | 91.0 | 91.5 | 10,188 | 3396 | 3396 | 3396 |
| 28 | NEATER [38] | 2014 | 88.0 | 75.8 | 84.8 | 86.5 | 8728 | 3396 | 3396 | 1936 |
| 29 | DEAGO [39] | 2015 | 85.8 | 85.8 | 85.8 | 85.8 | 10,188 | 3396 | 3396 | 3396 |
| 30 | MCT [40] | 2015 | 95.4 | 93.5 | 94.5 | 94.5 | 10,188 | 3396 | 3396 | 3396 |
| 31 | SMOTE IPF [41] | 2015 | 94.1 | 92.5 | 93.2 | 93.4 | 10,188 | 3396 | 3396 | 3396 |
| 32 | OUPS [42] | 2016 | 93.1 | 91.4 | 92.0 | 92.0 | 9493 | 3396 | 3396 | 2701 |
| 33 | SMOTE D [43] | 2016 | 81.4 | 78.7 | 80.1 | 80.1 | 10,189 | 3398 | 3396 | 3395 |
| 34 | CE SMOTE [44] | 2010 | 94.8 | 66.7 | 86.2 | 90.1 | 8647 | 2729 | 3396 | 2522 |
| 35 | Edge Det SMOTE [45] | 2010 | 93.8 | 92.6 | 93.2 | 93.5 | 10,188 | 3396 | 3396 | 3396 |
| 36 | ASMOBD [46] | 2012 | 88.2 | 86.8 | 87.4 | 87.3 | 10,188 | 3396 | 3396 | 3396 |
| 37 | Assembled SMOTE [47] | 2013 | 93.0 | 90.9 | 91.6 | 91.5 | 9191 | 2729 | 3396 | 3066 |
| 38 | SDSMOTE [48] | 2014 | 94.4 | 92.0 | 93.4 | 93.5 | 10,188 | 3396 | 3396 | 3396 |
| 39 | G SMOTE [49] | 2014 | 94.4 | 92.5 | 93.2 | 93.2 | 10,188 | 3396 | 3396 | 3396 |
| 40 | NT SMOTE [50] | 2014 | 93.7 | 92.8 | 93.1 | 93.1 | 10,188 | 3396 | 3396 | 3396 |
| 41 | Lee [51] | 2015 | 93.8 | 92.9 | 93.3 | 93.3 | 10,188 | 3396 | 3396 | 3396 |
| 42 | MDO [52] | 2016 | 92.1 | 90.3 | 91.3 | 91.4 | 10,188 | 3396 | 3396 | 3396 |
| 43 | Random SMOTE [53] | 2011 | 94.4 | 92.5 | 93.3 | 93.2 | 10,188 | 3396 | 3396 | 3396 |
| 44 | VIS RST [54] | 2016 | 66.7 | 66.6 | 66.7 | 66.7 | 7119 | 3396 | 3396 | 327 |
| 45 | AND SMOTE [55] | 2016 | 92.0 | 90.4 | 91.1 | 91.0 | 10,188 | 3396 | 3396 | 3396 |
| 46 | NRAS [56] | 2017 | 90.2 | 88.5 | 89.1 | 89.0 | 10,188 | 3396 | 3396 | 3396 |
| 47 | NDO sampling [57] | 2011 | 95.1 | 93.6 | 94.5 | 94.6 | 10,189 | 3397 | 3396 | 3396 |
| 48 | Gaussian SMOTE [58] | 2017 | 92.2 | 90.3 | 91.1 | 91.0 | 10,188 | 3396 | 3396 | 3396 |
| 49 | Kmeans SMOTE [59] | 2018 | 92.1 | 90.8 | 91.5 | 91.6 | 10,188 | 3396 | 3396 | 3396 |
| 50 | Supervised SMOTE [60] | 2014 | 92.8 | 91.5 | 92.1 | 92.1 | 10,188 | 3396 | 3396 | 3396 |
| 51 | SN SMOTE [61] | 2012 | 95.2 | 92.3 | 93.7 | 93.7 | 10,188 | 3396 | 3396 | 3396 |
| 52 | CCR [62] | 2017 | 88.9 | 87.1 | 88.0 | 88.2 | 9191 | 2729 | 3396 | 3066 |
| 53 | ANS [63] | 2017 | 91.3 | 88.7 | 90.0 | 90.1 | 9191 | 2729 | 3396 | 3066 |
The correctly classified points constituting the seabed object were presented in the 10 confusion matrices formed for:
unbalanced data and data with downsampling (
Table 4) for comparison [
64],
four matrices for algorithms with the highest overall classification accuracy (
Table 5), and
four matrices for algorithms with the highest median overall classification accuracy in 11 repetitions (
Table 6).
The overall classification accuracy achieved for unbalanced data was 89.6% and for downsampling data was 93.5% [
64]. The downsampling method was used, in which each class was given the same number of vectors, similar to in class 3. The data set, divided into three equal classes, contained a total of 219 input vectors (3 × 79). Downsampling contributed to increasing the overall classification accuracy by 3.9%. The correct classification of points in class 3 also increased by 11.3%.
Table 5 and
Table 6 present the confusion matrix for the four algorithms with the best object detection results and four algorithms with the best median values. The correct classification of points in class 3 (seabed object) ranged between 89.7% and 93.4% for the best results of imbalanced learning and between 84.9% and 92.5% for median results. In all cases, an increase in the overall classification accuracy and point detection on the seabed objects was achieved. The water surface was classified with an accuracy of 100% in all algorithms. Two algorithms—Safe Level SMOTE and VIS RST—were found to be ineffective and as a result, none of the points on the objects were detected.
The accuracy of oversampling algorithms was assessed using three accuracy evaluation indices: precision, recall, and F1-score.
Precision refers to the proportion of correctly predicted points on the object to all points on the object, i.e.,
Recall: refers to the proportion of the correctly predicted points on the object to all points on the object, i.e.,
F1-score refers to the harmonic mean of precision and recall, i.e.,
where
TP, TN, FP, and
FN denote true positive, true negative, false positive, and false negative, respectively.
The indices were computed for the median of results. Recall was found to be high for all four algorithms: 0.92 for LVQ SMOTE, 0.86 for ROSE, 0.85 for borderline-SMOTE2, and 0.84 for PDFOS. The F1-score for class 3 was calculated to be 0.54, 0.66, 0.68, and 0.72, respectively. Among the oversampling algorithms, MDO had the best F1-score of 0.75, which was comparable with that of PDFOS. The overall accuracy of the median results of MDO was 91.4, and the confusion matrix of the median results is presented in
Table 7.
4. Conclusions
ALB technique follows existing water reservoir measurement patterns. Monitoring the seabed and detection of seabed objects in the coastal zone around ports with heavy vessel traffic help in decreasing the risk of maritime grounding and collision with underwater obstacles, thereby reducing the probability of environmental incidents that can occur due to cargo and fuel leakage or even unexploded ordnance explosion.
This study used a total of 53 oversampling algorithms with imbalanced MLP neural learning for the classification of the ALB data and detection of seabed objects. The results revealed that selected oversampling algorithms classified point clouds better than unbalanced data or data with simple downsampling. The algorithms that produced the best results can be divided into two groups: (1) the algorithms with good recall, which improves the detection of points on objects—LVQ SMOTE and ROSE; and (2) those that improve the general classification with the highest F1-score—MDO and PDFOS. Identifying the oversampling method that gives the best results for object classification and detection is challenging. This is because a good recall is often associated with false classification of points.
As the present study did not cover all the issues related to the subject, future work should focus on using SMOTE methods for improving the detection of underwater objects. Additionally, the possibility of applying SMOTE in deep-sea bottom imaging using MBES would be a topic of interest.





{kind=link}
{kind=link}
{kind=link}
{kind=link}