
Location and Time Aware Multitask Allocation in Mobile Crowd-Sensing Based on Genetic Algorithm


 , ,
, ,
Abstract
1. Introduction
- We presented a task allocation approach in the MCS system under a given set of allocated task budgets and workers’ available time, which is formulated as a workers welfare maximization problem.
- We proposed an algorithm called Worker Multi-task Allocation (WMTA-GA) that enables workers to select the sensing tasks that are convenient for them and will maximize their profit.
- Simulation shows that WMTA-GA obtains better performance, generates adequate workers welfare, and allocates more tasks to the workers than the existing approaches.
2. Related Work
2.1. Task Allocation
2.2. Incentive Mechanism
2.3. Summary
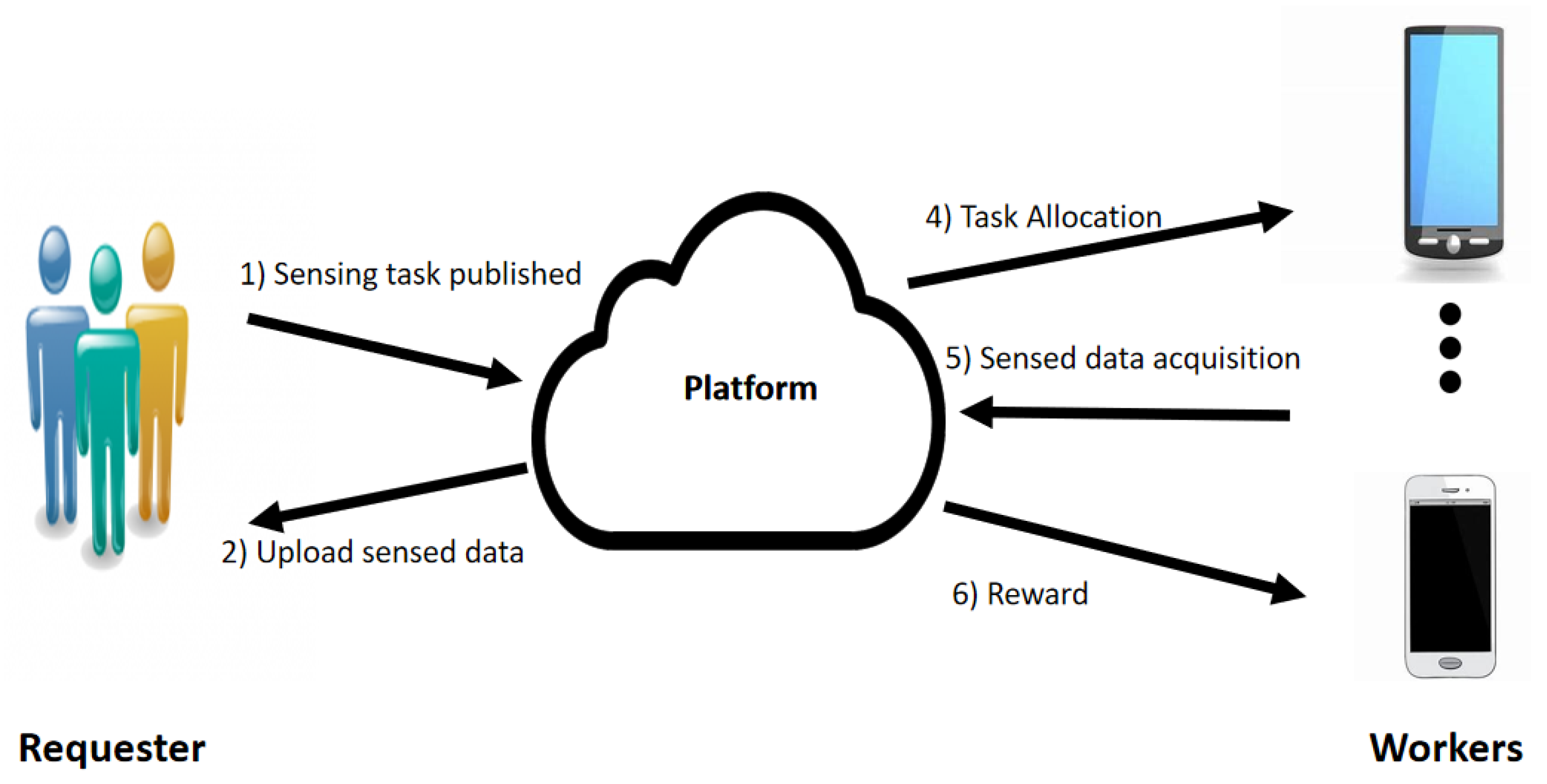
3. System Model and Problem Statement
3.1. System Model
3.2. Problem Statement
4. Pricing Mechanism
5. Multi-Task Allocation Algorithm
Genetic Algorithm for Multitask Allocation
| Algorithm 1 WMTA-GA. |
|
| Algorithm 2 Initial population. |
|
| Algorithm 3 Re-establishing Operator. |
|
- Chromosome Representation and Fitness EvaluationThe main aim of WMTA-GA is to find a solution that indicates task–worker allocation and task completion order. Since the number of chromosome solutions is uncertain, we use a matrix structure to represent them. Each chromosome consists of b genetic segments representing the registered workers. The genetic segments are identified using the index of their position in the chromosome. Each genetic segment is divided into genes that represent the tasks assigned to the worker. According to the constraints Equations (2)–(6), we classify the chromosomes into supported chromosomes meaning that the multitask allocation satisfies the constraints and unsupported chromosomes when the constraints are not satisfied.Since each chromosome represents all the workers and their assigned tasks, the whole population represents the set of workers and their assigned tasks.The fitness function was applied to the chromosomes in a population to evaluate the quality of the population. Since the objective function is to maximize the workers welfare, then it is used as an indicator of each chromosome’s fitness level (i.e., the amount of workers welfare generated by a chromosome is directly related to its fitness level). Therefore, the fitness function of a chromosome is calculated as:This implies that for a population in a given generation defined as G = {C1, C2, C3, …, Cl}, the task assignment strategy of chromosome is the row vector , where can be either “1” if the task is allocated to the worker, or otherwise is “0”.
- Selection OperatorThe selector operator aims to allow the chromosomes with the higher fitness level to proceed to the next generation while taking into consideration the population diversity; however, chromosomes with lower fitness values can contain acceptable genetic segment properties. To guarantee that top-quality chromosomes are accepted into the next generation, we firstly select elitist chromosomes to ensure that chromosomes with high fitness levels do not disappear. To obtain this type of chromosome, we arranged the parent population chromosomes in descending order of fitness, and randomly picked out a specified number of chromosomes (e.g., first to fifth) and passed it on to the next generation. Afterward, tournament selection [3] is applied to the remaining chromosomes. In each generation, a certain number of chromosomes are compared and the chromosome with the highest fitness level proceeds to the next generation. This continues until the required amount is obtained.
- Crossover and Mutation OperatorIn the crossover operation, a new generation of sophisticated chromosomes is generated by recombining the parent chromosomes through crossover operation. Initially, two-parent chromosomes from the elite set of chromosomes and a single chromosome from the remaining chromosomes are selected. Then the fitness value of the genetic segments of the chromosomes (elite and normal chromosomes that are to be combined by crossover operation) are compared using their fitness level, and the superior genetic segment is passed to the new chromosome. In the process of performing this operation, the entire population is evolved and the diversity of the population is improved.It is important to realize that the new chromosome generated from the crossover operation might not follow the constraint conditions and therefore become an unsupported chromosome. To avoid local optimum and enhance the population diversity, the mutation operation is applied to the chromosome.For the chromosome mutation to occur, we select two genes from two genetic segments in the same chromosome and swapped them to generate mutated chromosomes. However, during the mutation process, the status of some chromosomes may change and become unsupported.
- Re-establishing OperatorAfter the crossover and mutation operation, some supported chromosomes may convert to unsupported chromosomes and for that reason, we introduce a re-establishing operator. Initially, we confirm whether each genetic segment satisfies all the constraints. If a constraint is violated, then we select a subset of genes in the corresponding genetic segment that satisfies the constraints. Secondly, if a task is allocated more than once in a particular chromosome, we use the idea of the survival of the fittest to determine which of the tasks is to be retained. Finally, we consider the fact that some workers may have remaining time to perform some unallocated sensing tasks and determine which chromosome should be selected for this task such that the constraint remains satisfied.
6. Experimental Results
6.1. Experimental Settings
6.2. Performance Metric
- Workers Welfare: This metric is an indicator of how well an algorithm performs based on fulfilling the condition of maximizing all the workers’ profit. The higher this profit, the better the performance of the algorithm.
- Number of Allocated Tasks: This indicates how many tasks are allocated to the selected workers. When the number of allocated tasks is high, it shows that the large number of workers can complete the tasks and this improves the reliability of the platform.
- Average Performance w.r.t Varying Number of Tasks: The average worker’s welfare subject to the number of tasks in each algorithm is evaluated. This ratio assists in evaluating the performance of the algorithms.
- Average Performance w.r.t Varying Number of Workers: The performance of each algorithm is compared by evaluating each of their average workers welfare with respect to the number of workers. A high ratio indicates a high-performing algorithm.
6.3. Baseline Approaches
- Greedy Worker Payoff-based Task Allocation (GWP): In [17], the GWP approach was used to greedily select tasks with the highest reward in each iteration. We modified this algorithm to maximize the workers welfare, whereby each worker selects the tasks with the biggest reward and these workers are assigned to their selected tasks if the worker–task allocation satisfies the validity conditions. If the conditions are satisfied, then we exchange the location of the worker with the location of the current task, therefore changing the new initial location of the worker. This process continues until each worker’s working time is finished.
- Greedy Worker Reward-Distance Ratio-GA (GWR-GA): The second benchmark algorithm is the modified greedy payoff/distance-based task selection algorithm (G.P.D.A.) [17]. This approach has been modified to maximize the workers welfare by employing GA tasks with a high payoff/distance ratio to be assigned to workers, and GA is employed to obtain an optimal chromosome (i.e., worker–task allocation).
6.4. Result Analysis
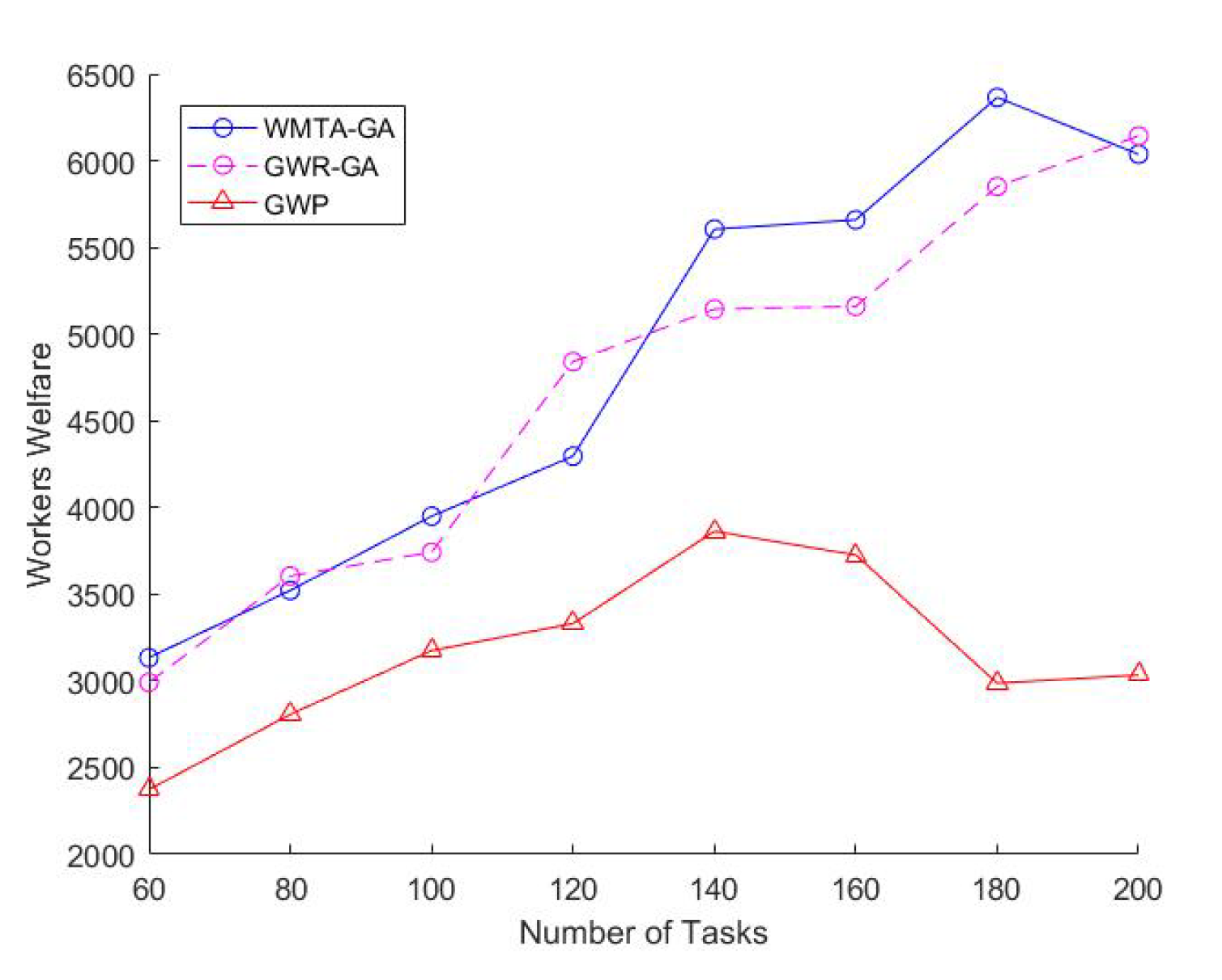
- Impact of Varying the Number of TasksIn Figure 2, we observe that the number of tasks is directly proportional to the workers welfare and that WMTA-GA outperforms GWR-GA and GWP. For instance, when the number of tasks was 100 and 140, the workers welfare for WMTA-GA was 3950 and 5605, respectively, which is much higher than the welfare obtained by GWR-GA (3742 and 5144) and GWP(3175 and 3863).As shown in Figure 3, the ratio of the assigned tasks in WMTA-GA, GWR-GA, and GWP declines significantly with the increase in the number of tasks. However, when the number of tasks is 60 and 200, we see that the WMTA-GA recorded the highest ratio of assigned tasks, which are 0.6 and 0.26, respectively. Table 2 illustrates the performances of the three approaches and indicates that WMTA-GA performs better in comparison to GWP and GWR-GA. This is confirmed by their average utility value where WMTA-GA is 73.24 which is 13% and 68% higher than GWR-GA and GWP, respectively.
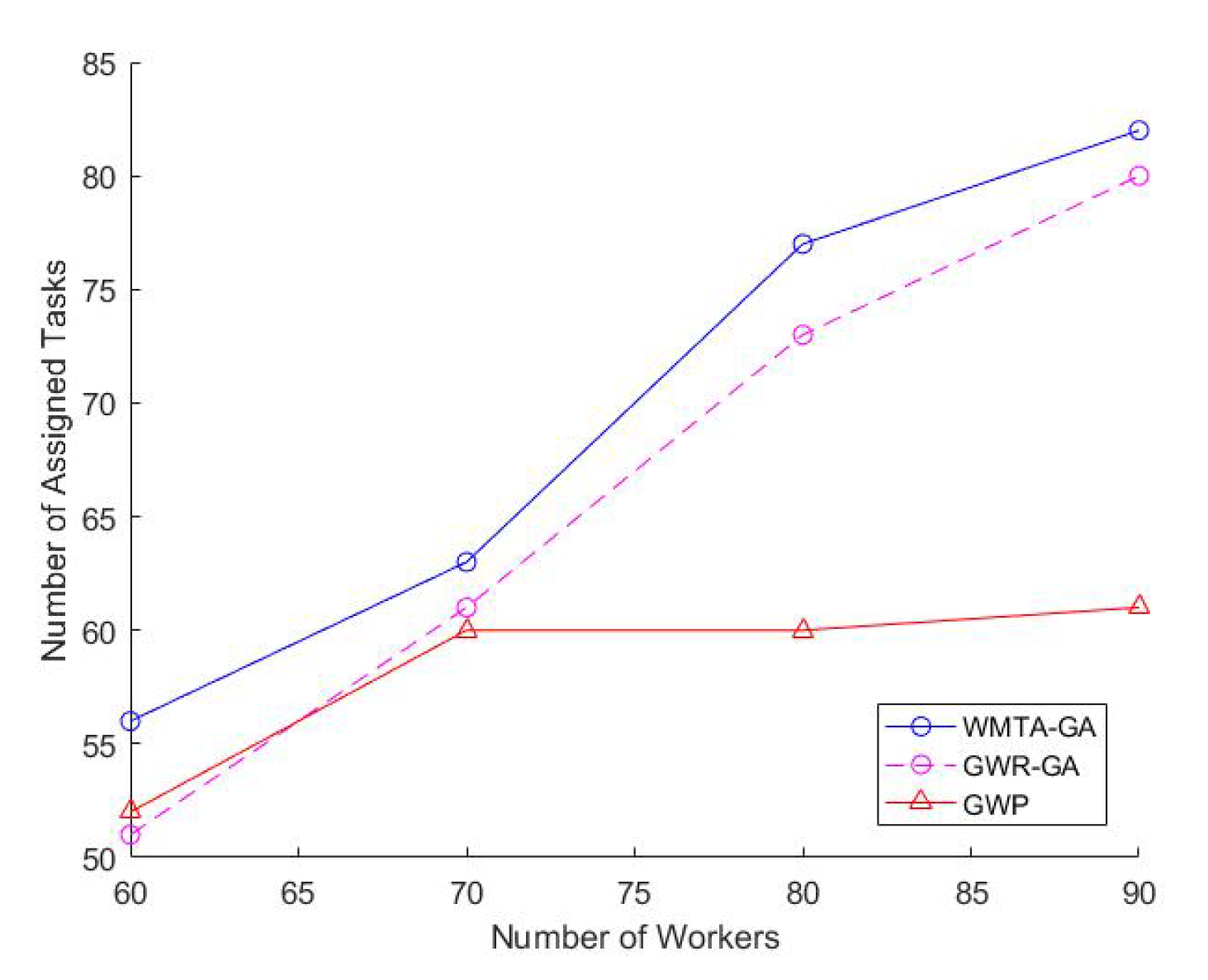
- Impact of Varying Number of WorkersWe investigate how varying the number of workers affects worker welfare, the number of task allocations, and the average performance of the workers. We set the range of workers from 60 to 90 and fixed the number of tasks to 200. In Figure 4, we observe that as the number of workers increases, the workers’ welfare increases as well. The workers’ welfare in WMTA-GA steadily increases compared to the other approaches. For example, when the number of workers ranges from 60 to 80, WMTA-GAs’ worker welfare is 3100 and 5300.In Figure 5, we see that WMTA-GA provides the highest number of assigned tasks as compared to the other algorithms. When the number of workers is 60 and 80, WMTA-GA achieves 56 and 77 number of the assigned tasks.The number of the assigned tasks increases as more tasks are successfully allocated, as observed in Figure 5. The WMTA-GA approach had the highest number of assigned tasks compared to other approaches for n = 60 to 90, with the highest recorded number of assigned tasks of 84 at . GWR-GA follows the same trend as WMTA-GA because it achieved a similar result to WMTA-GA. However, GWP had the lowest overall number of assigned tasks and peaked at 68 assigned tasks at .We observed from Table 3 that WMTA-GA has the best average performance as compared to GWR-GA and GWP, which is indicated by their average utility values. WMTA-GA’s average utility value is 17.26% more than GWP, and 1.98% more than GWR-GA. The second-best performing algorithm is GWR-GA, with an average utility value higher than GWP by 15 percent. Compared to WMTA-GA and GWR-GA, the GWP had a minor favourable result, with an average performance of −15% and −13.3% for WMTA-GA and GWR-GA, respectively.
6.5. Discussion
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Correction Statement
References
- He, Z.; Cao, J.; Liu, X. High quality participant recruitment in vehicle-based crowdsourcing using predictable mobility. In Proceedings of the 2015 IEEE Conference on Computer Communications (INFOCOM), Kowloon, Hong Kong, 26 April–1 May 2015; pp. 2542–2550. [Google Scholar] [CrossRef]
- Karaliopoulos, M.; Telelis, O.; Koutsopoulos, I. User recruitment for mobile crowdsensing over opportunistic networks. In Proceedings of the 2015 IEEE Conference on Computer Communications (INFOCOM), Kowloon, Hong Kong, 26 April–1 May 2015; pp. 2254–2262. [Google Scholar] [CrossRef]
- Li, X.; Zhang, X. Multi-Task Allocation Under Time Constraints in Mobile Crowdsensing. IEEE Trans. Mob. Comput. 2021, 20, 1494–1510. [Google Scholar] [CrossRef]
- Asim, M.; Mashwani, W.K.; El-Latif, A.A. Energy and Task Completion Time Minimization Algorithm for UAVs-Empowered MEC system. Sustain. Comput. Inform. Syst. 2022, 35, 100698. [Google Scholar] [CrossRef]
- Zhao, Y.; Guo, J.; Chen, X.; Hao, J.; Zhou, X.; Zheng, K. Coalition-based Task Assignment in Spatial Crowdsourcing. In Proceedings of the 2021 IEEE 37th International Conference on Data Engineering (ICDE), Chania, Greece, 19–22 April 2021; IEEE Computer Society: Los Alamitos, CA, USA, 2021; pp. 241–252. [Google Scholar] [CrossRef]
- Wang, J.; Wang, F.; Wang, Y.; Wang, L.; Qiu, Z.; Zhang, D.; Guo, B.; Lv, Q. HyTasker: Hybrid Task Allocation in Mobile Crowd Sensing. IEEE Trans. Mob. Comput. 2020, 19, 598–611. [Google Scholar] [CrossRef]
- Zhao, Y.; Zheng, K.; Li, Y.; Su, H.; Liu, J.; Zhou, X. Destination-Aware Task Assignment in Spatial Crowdsourcing: A Worker Decomposition Approach. IEEE Trans. Knowl. Data Eng. 2020, 32, 2336–2350. [Google Scholar] [CrossRef]
- Wei, X.; Wang, Y.; Tan, J.; Gao, S. Data Quality Aware Task Allocation with Budget Constraint in Mobile Crowdsensing. IEEE Access 2018, 6, 48010–48020. [Google Scholar] [CrossRef]
- Chen, Y.; Li, Z.; Yang, B.; Naia, K.; Li, K. A Stackelberg game approach to multiple resources allocation and pricing in mobile edge computing. Future Gener. Comput. Syst. 2020, 108, 273–287. [Google Scholar] [CrossRef]
- Dai, M.; Su, Z.; Wang, Y.; Xu, Q. Contract Theory Based Incentive Scheme for Mobile Crowd Sensing Networks. In Proceedings of the 2018 International Conference on Selected Topics in Mobile and Wireless Networking (MoWNeT), Tangier, Morocco, 20–22 June 2018; pp. 1–5. [Google Scholar]
- Singla, A.; Krause, A. Truthful Incentives in Crowdsourcing Tasks Using Regret Minimization Mechanisms; Association for Computing Machinery: New York, NY, USA, 2013. [Google Scholar] [CrossRef]
- Yucel, F.; Yuksel, M.; Bulut, E. Coverage-Aware Stable Task Assignment in Opportunistic Mobile Crowdsensing. IEEE Trans. Veh. Technol. 2021, 70, 3831–3845. [Google Scholar] [CrossRef]
- Yucel, F.; Bulut, E. Location-Dependent Task Assignment for Opportunistic Mobile Crowdsensing; IEEE Press: Piscataway, NJ, USA, 2020. [Google Scholar] [CrossRef]
- Xiong, J.; Chen, X.; Tian, Y.; Ma, R.; Chen, L.; Yao, Z. MAIM: A Novel Incentive Mechanism Based on Multi-Attribute User Selection in Mobile Crowdsensing. IEEE Access 2018, 6, 65384–65396. [Google Scholar] [CrossRef]
- Liu, W.; Yang, Y.; Wang, E.; Wu, J. Dynamic User Recruitment with Truthful Pricing for Mobile CrowdSensing. In Proceedings of the IEEE INFOCOM 2020—IEEE Conference on Computer Communications, Toronto, ON, Canada, 6–9 July 2020; pp. 1113–1122. [Google Scholar] [CrossRef]
- Huang, Y.; Chen, H.; Ma, G.; Lin, K.; Ni, Z.; Yan, N.; Wang, Z. OPAT: Optimized Allocation of Time-Dependent Tasks for Mobile Crowdsensing. IEEE Trans. Ind. Inform. 2022, 18, 2476–2485. [Google Scholar] [CrossRef]
- Wang, Z.; Tan, R.; Hu, J.; Zhao, J.; Wang, Q.; Xia, F.; Niu, X. Heterogeneous Incentive Mechanism for Time-sensitive and Location-dependent Crowdsensing Networks with Random Arrivals. Comput. Netw. 2017, 131, 96–109. [Google Scholar] [CrossRef]
- Akter, S.; Yoon, S. DaTask: A Decomposition-Based Deadline-Aware Task Assignment and Workers’ Path-Planning in Mobile Crowd-Sensing. IEEE Access 2020, 8, 49920–49932. [Google Scholar] [CrossRef]
- Cheung, M.H.; Hou, F.; Huang, J. Delay-Sensitive Mobile Crowdsensing: Algorithm Design and Economics. IEEE Trans. Mob. Comput. 2018, 17, 2761–2774. [Google Scholar] [CrossRef]
- Liu, W.; Yang, Y.; Wang, E.; Han, Z.; Wang, X. Prediction Based User Selection in Time-Sensitive Mobile Crowdsensing. In Proceedings of the 2017 14th Annual IEEE International Conference on Sensing, Communication, and Networking (SECON), San Diego, CA, USA, 12–14 June 2017; pp. 1–9. [Google Scholar] [CrossRef]
- Wang, H.; Zhao, D.; Ma, H.; Ding, L. MB-GVNS: Memetic Based Bidirectional General Variable Neighborhood Search for Time-Sensitive Task Allocation in Mobile Crowd Sensing. IEEE Trans. Veh. Technol. 2020, 69, 2219–2229. [Google Scholar] [CrossRef]
- Guo, B.; Liu, Y.; Wu, W.; Yu, Z.; Han, Q. ActiveCrowd: A Framework for Optimized Multitask Allocation in Mobile Crowdsensing Systems. IEEE Trans. Hum.-Mach. Syst. 2017, 47, 392–403. [Google Scholar] [CrossRef]
- Yang, S.; Qi, X.; Wu, F.; Gao, X.; Chen, G. Bandit User Selection Algorithm for Budgeted and Time-Limited Mobile Crowdsensing. In Proceedings of the GLOBECOM 2017–2017 IEEE Global Communications Conference, Singapore, 4–6 December 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Wang, Z.; Zhao, J.; Hu, J.; Zhu, T.; Wang, Q.; Ren, J.; Li, C. Towards Personalized Task-Oriented Worker Recruitment in Mobile Crowdsensing. IEEE Trans. Mob. Comput. 2021, 20, 2080–2093. [Google Scholar] [CrossRef]
- Yucel, F.; Bulut, E. Time-dependent Stable Task Assignment in Participatory Mobile Crowdsensing. In Proceedings of the 2020 IEEE 45th Conference on Local Computer Networks (LCN), Sydney, Australia, 16–19 November 2020; pp. 433–436. [Google Scholar] [CrossRef]
- Cheung, M.H.; Hou, F.; Huang, J.; Southwell, R. Distributed Time-Sensitive Task Selection in Mobile Crowdsensing. IEEE Trans. Mob. Comput. 2021, 20, 2172–2185. [Google Scholar] [CrossRef]
- Kortoçi, P.; Mehrabi, A.; Joe-Wong, C.; Di Francesco, M. Incentivizing Opportunistic Data Collection for Time-Sensitive IoT Applications. In Proceedings of the 2021 18th Annual IEEE International Conference on Sensing, Communication, and Networking (SECON), Rome, Italy, 6–9 July 2021; pp. 1–9. [Google Scholar] [CrossRef]
- Yang, J.; Fu, L.; Yang, B.; Xu, J. Participant Service Quality Aware Data Collecting Mechanism with High Coverage for Mobile Crowdsensing. IEEE Access 2020, 8, 10628–10639. [Google Scholar] [CrossRef]
- Majeed, D.M.; Zhang, L.; Shi, K. Optimal Data Collection for Mobile Crowdsensing over Integrated Cellular and Opportunistic Networks. IEEE Access 2020, 8, 157270–157283. [Google Scholar] [CrossRef]
- Akter, S.; Dao, T.N.; Yoon, S. Time-Constrained Task Allocation and Worker Routing in Mobile Crowd-Sensing Using a Decomposition Technique and Deep Q-Learning. IEEE Access 2021, 9, 95808–95822. [Google Scholar] [CrossRef]
- Xu, J.; Fu, J.R.; Yang, D.; Xu, L.J.; Wang, L.; Li, T. FIMI: A Constant Frugal Incentive Mechanism for Time Window Coverage in Mobile Crowdsensing. J. Comput. Sci. Technol. 2017, 32, 919–935. [Google Scholar] [CrossRef]
- Sun, X.; Yang, X.; Wang, C.; Wang, J. A Novel User Selection Strategy with Incentive Mechanism Based on Time Window in Mobile Crowdsensing. Discret. Dyn. Nat. Soc. 2020, 2020, 1–13. [Google Scholar] [CrossRef]
- Gao, H.; Liu, C.H.; Tang, J.; Yang, D.; Hui, P.; Wang, W. Online Quality-Aware Incentive Mechanism for Mobile Crowd Sensing with Extra Bonus. IEEE Trans. Mob. Comput. 2019, 18, 2589–2603. [Google Scholar] [CrossRef]
- Wang, Y.; Cai, Z.; Zhan, Z.H.; Gong, Y.J.; Tong, X. An Optimization and Auction-Based Incentive Mechanism to Maximize Social Welfare for Mobile Crowdsourcing. IEEE Trans. Comput. Soc. Syst. 2019, 6, 414–429. [Google Scholar] [CrossRef]
- Xu, C.; Si, Y.; Zhu, L.; Zhang, C.; Sharif, K.; Zhang, C. Pay as How You Behave: A Truthful Incentive Mechanism for Mobile Crowdsensing. IEEE Internet Things J. 2019, 6, 10053–10063. [Google Scholar] [CrossRef]
- Yang, S.; Jiang, W.; Duan, J.; Huang, Z.; Lu, J. Max-Min Fairness Multi-task Allocation in Mobile Crowdsensing. In Machine Learning for Cyber Security; Springer International Publishing: Berlin/Heidelberg, Germany, 2020; pp. 164–179. [Google Scholar]
- Liu, H.; Jiang, W.; Yang, S.; Lu, J.; Ning, D. Multi-term Multi-task Allocation for Mobile Crowdsensing with Weighted Max-Min Fairness. In Machine Learning for Cyber Security; Springer International Publishing: Berlin/Heidelberg, Germany, 2020; pp. 393–404. [Google Scholar]
- Wang, Z.; Zhu, J.; Li, D. Prediction Based Reverse Auction Incentive Mechanism for Mobile Crowdsensing System. In Combinatorial Optimization and Applications; Springer: Cham, Switzerland, 2019; pp. 541–552. [Google Scholar] [CrossRef]
- Wang, Z.; Hu, J.; Zhao, J.; Yang, D.; Chen, H.; Wang, Q. Pay On-Demand: Dynamic Incentive and Task Selection for Location-Dependent Mobile Crowdsensing Systems. In Proceedings of the 2018 IEEE 38th International Conference on Distributed Computing Systems (ICDCS), Vienna, Austria, 2–5 July 2018; pp. 611–621. [Google Scholar] [CrossRef]
- Holland, J. Erratum: Genetic Algorithms and the Optimal Allocation of Trials. SIAM J. Comput. 1974, 3, 326. [Google Scholar] [CrossRef]
- Asim, M.; Wang, Y.; Wang, K.; Huang, P.Q. A Review on Computational Intelligence Techniques in Cloud and Edge Computing. IEEE Trans. Emerg. Top. Comput. Intell. 2020, 4, 742–763. [Google Scholar] [CrossRef]
- Asim, M.; Mashwani, W.K.; Belhaouari, S.B.; Hassan, S. A Novel Genetic Trajectory Planning Algorithm with Variable Population Size for Multi-UAV-Assisted Mobile Edge Computing System. IEEE Access 2021, 9, 125569–125579. [Google Scholar] [CrossRef]
- Asim, M.; Mashwani, W.K.; Habib, S.; Belhaouari, S.B. An evolutionary trajectory planning algorithm for multi-UAV-assisted MEC system. Soft Comput. 2021. [Google Scholar] [CrossRef]
- Asim, M.; Abd El-Latif, A.A. Intelligent computational methods for multi-unmanned aerial vehicle-enabled autonomous mobile edge computing systems. ISA Trans. 2021. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| System Model Parameter | |
|---|---|
| Worker Parameter | |
| W | Set of all workers |
| n | Number of workers |
| worker i | |
| Sensing cost of worker | |
| Current position of worker | |
| Available working time of worker | |
| Power level of worker | |
| Velocity of worker | |
| Payment given to worker | |
| Willingness of worker | |
| Willingness factor of worker for task | |
| Response time of worker for task | |
| Residual power of worker | |
| Task popularity | |
| Specification of worker for task | |
| Specification of worker for | |
| Profile for worker i | |
| Task Parameter | |
| T | Set of all tasks |
| m | Number of task |
| Willing threshold of task | |
| Task j | |
| End time of task | |
| Start time of task | |
| Sensing duration of task | |
| Budget allocated to task | |
| Profile for task | |
| Set of interested tasks for worker | |
| Task Demand for task | |
| Other | |
| B | Total budget |
| Distance between worker location and the task position | |
| Workers’ Welfare Average Performance Based on the Number of Tasks | |||
|---|---|---|---|
| WMTA-GA | GWR-GA | GWP | |
| WMTA-GA | - | 2.91 | 73.24 |
| GWR-GA | −3 | - | 68 |
| GWP | 42 | −40.60 | - |
| Workers Welfare Average Performance Based on Number of Workers | |||
|---|---|---|---|
| WMTA-GA | GWR-GA | GWP | |
| WMTA-GA | - | 1.98 | 17.26 |
| GWR-GA | −2 | - | 15 |
| GWP | −15 | −13.03 | - |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ipaye, A.A.; Chen, Z.; Asim, M.; Chelloug, S.A.; Guo, L.; Ibrahim, A.M.A.; Abd El-Latif, A.A. Location and Time Aware Multitask Allocation in Mobile Crowd-Sensing Based on Genetic Algorithm. Sensors 2022, 22, 3013. https://doi.org/10.3390/s22083013
Ipaye AA, Chen Z, Asim M, Chelloug SA, Guo L, Ibrahim AMA, Abd El-Latif AA. Location and Time Aware Multitask Allocation in Mobile Crowd-Sensing Based on Genetic Algorithm. Sensors. 2022; 22(8):3013. https://doi.org/10.3390/s22083013
Chicago/Turabian StyleIpaye, Aridegbe A., Zhigang Chen, Muhammad Asim, Samia Allaoua Chelloug, Lin Guo, Ali M. A. Ibrahim, and Ahmed A. Abd El-Latif. 2022. "Location and Time Aware Multitask Allocation in Mobile Crowd-Sensing Based on Genetic Algorithm" Sensors 22, no. 8: 3013. https://doi.org/10.3390/s22083013
APA StyleIpaye, A. A., Chen, Z., Asim, M., Chelloug, S. A., Guo, L., Ibrahim, A. M. A., & Abd El-Latif, A. A. (2022). Location and Time Aware Multitask Allocation in Mobile Crowd-Sensing Based on Genetic Algorithm. Sensors, 22(8), 3013. https://doi.org/10.3390/s22083013