
Traffic-Data Recovery Using Geometric-Algebra-Based Generative Adversarial Network

 ,
, 
Abstract
:1. Introduction
2. Related Work
- We present a geometric algebra based generative adversarial network (GAGAN) to handle the problem of traffic data recovery. To represent and process multidimensional signals more efficiently, original traffic data are embedded in the framework of geometric algebra to form multivector-valued spatial-temporal matrices.
- The generator of the proposed GAGAN contains a geometric algebra convolutional module, an attention module and a deconvolutional module. The geometric algebra convolutional module is capable of learning the correlations of multidimensional inputs more efficiently. The loss function of the generator considers both the global and local traffic data mean squared errors.
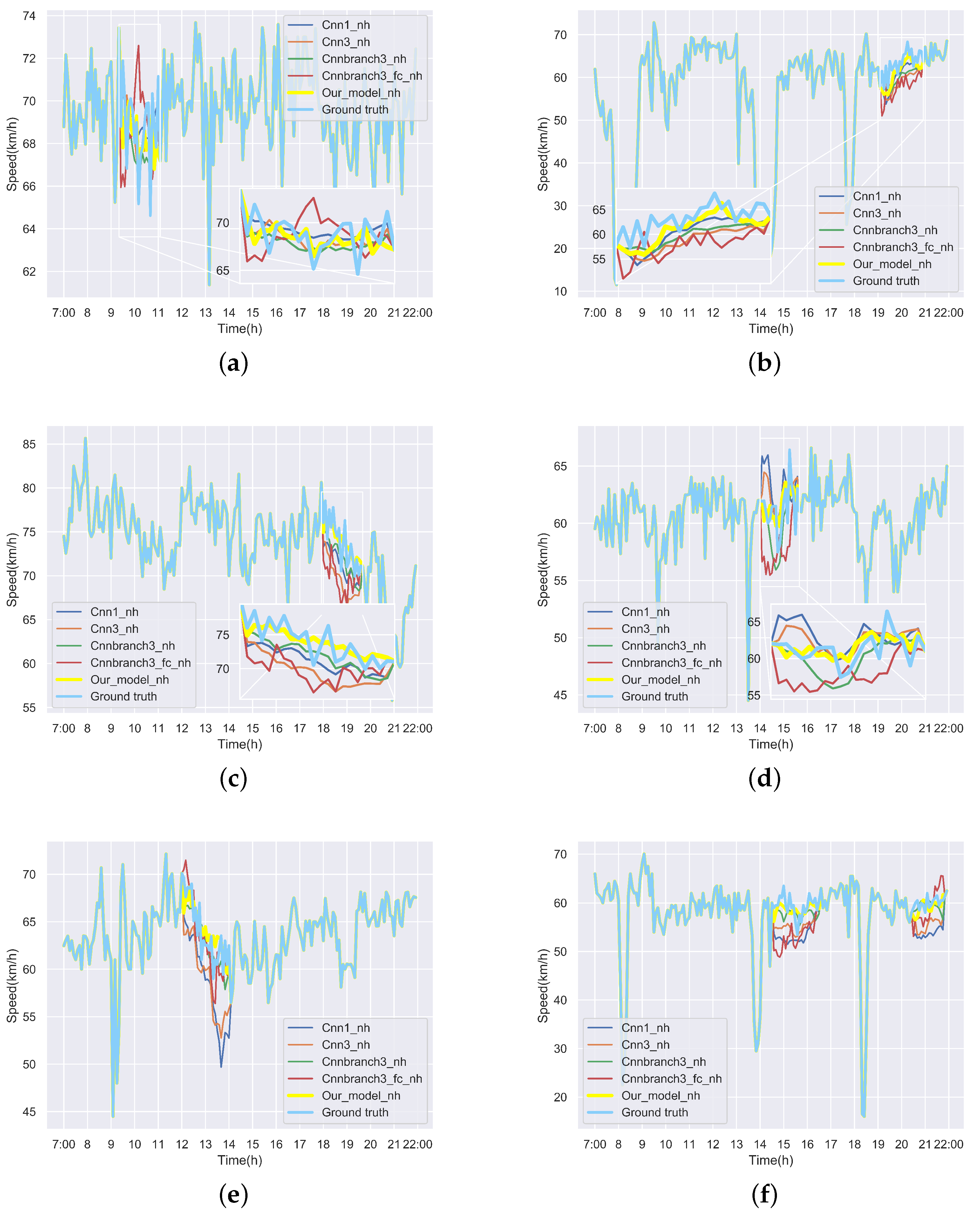
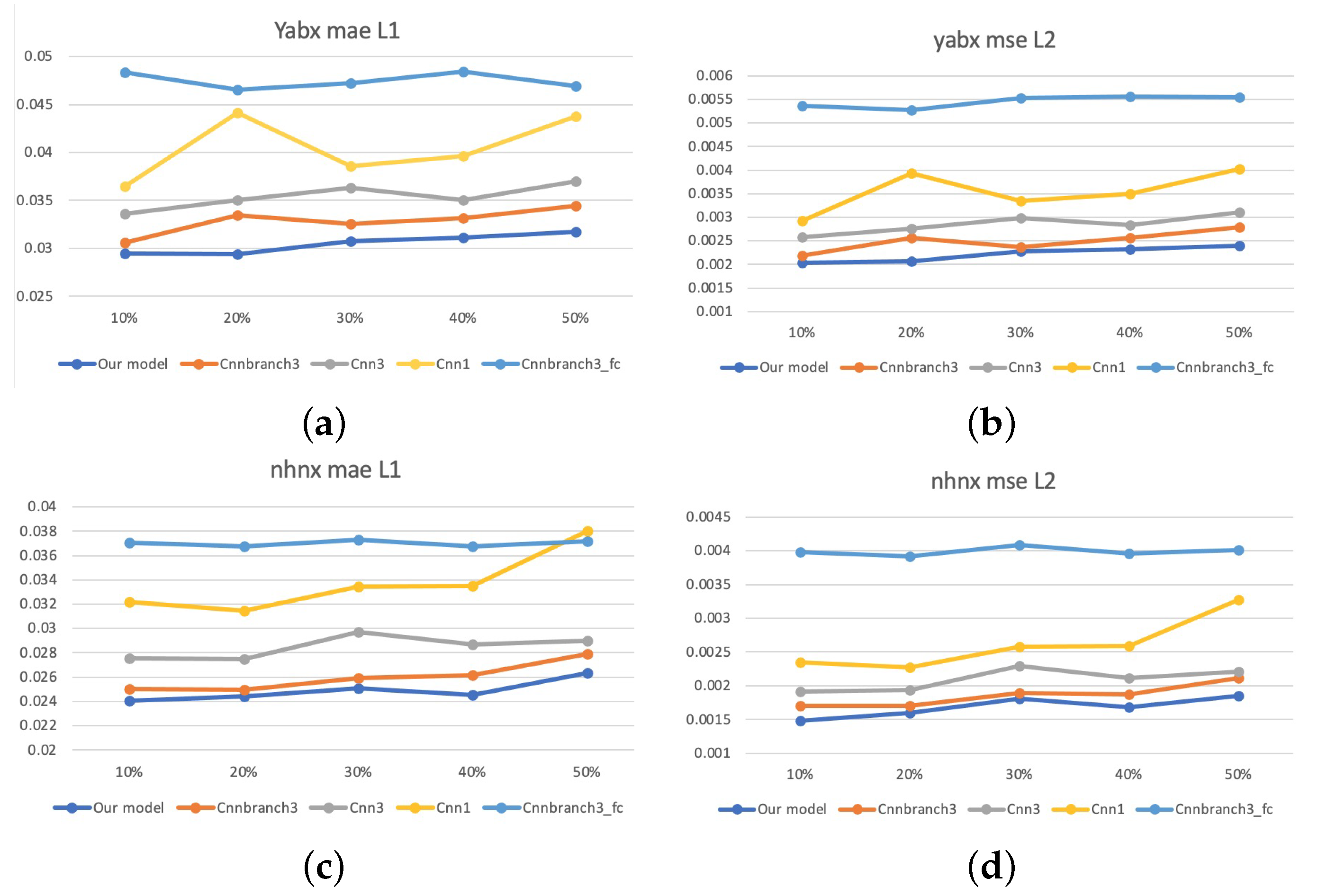
- We conduct various experiments based on traffic data from two urban expressways of Shanghai, China. Experimental results prove that our method can effectively repair missing traffic data in a robust way. Compared with the state-of-the-art work, our approach shows the best performance.
3. Geometric Algebra of Euclidean 3D Space
4. Proposed Methodology
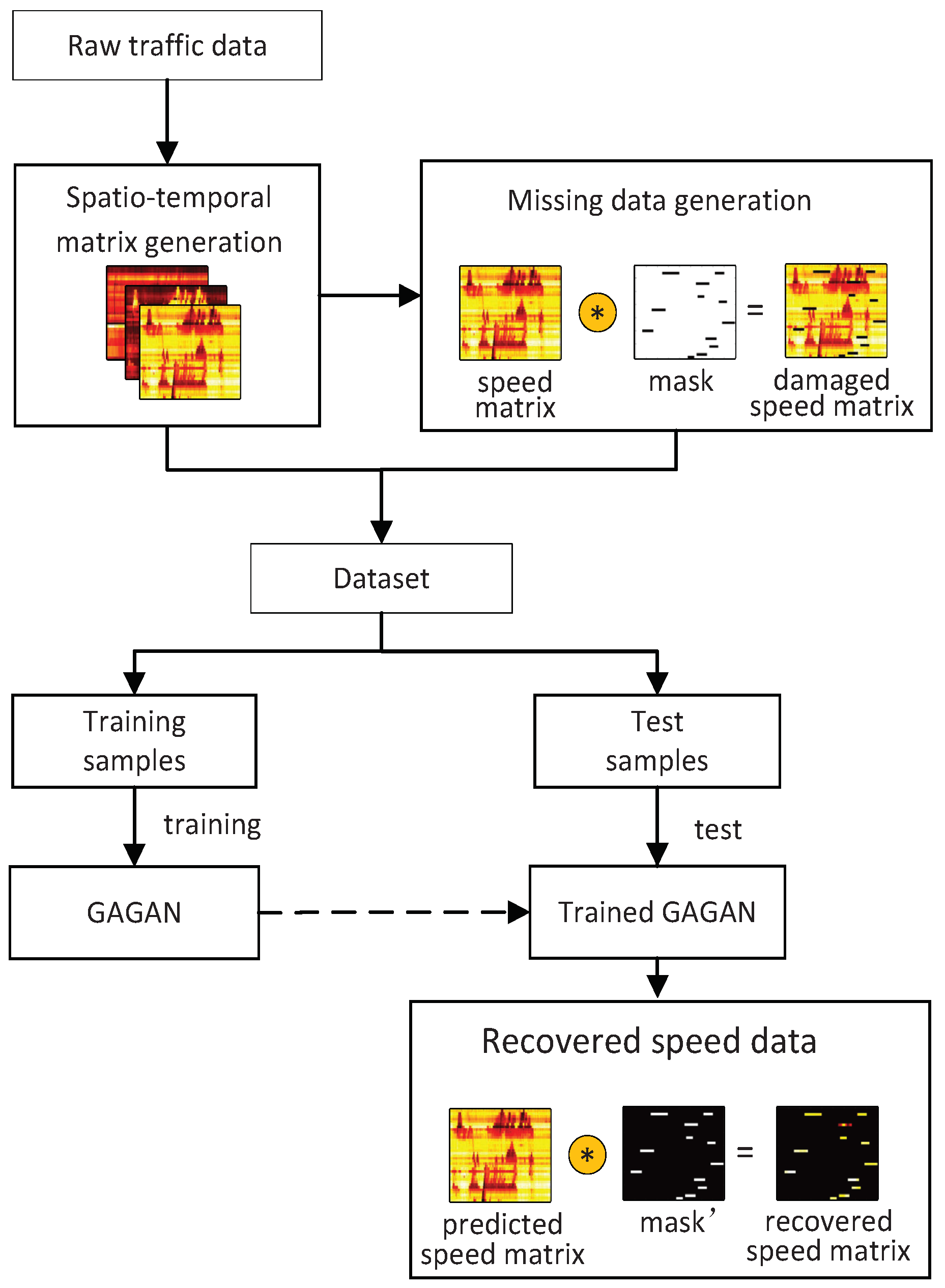
4.1. Overview
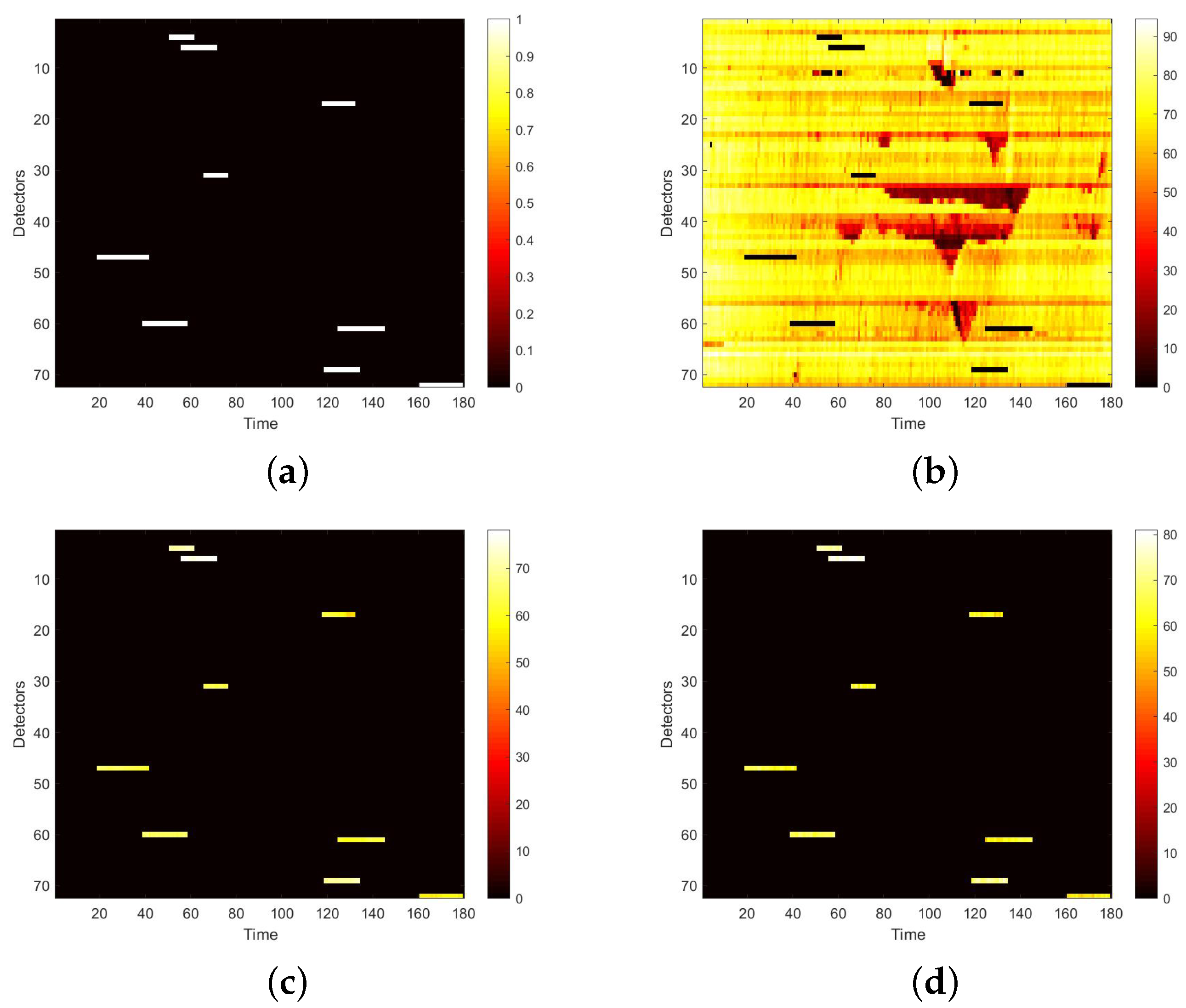
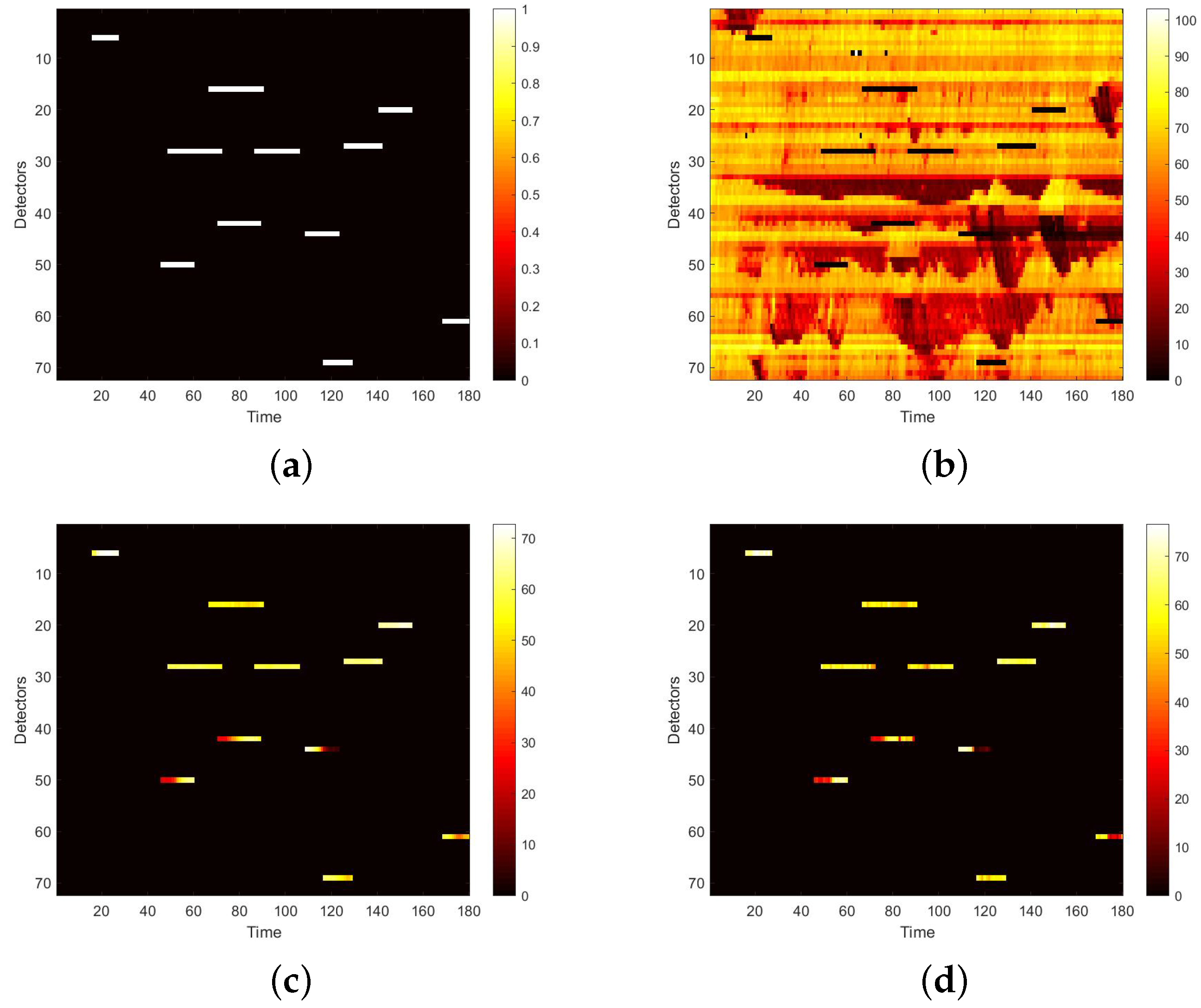
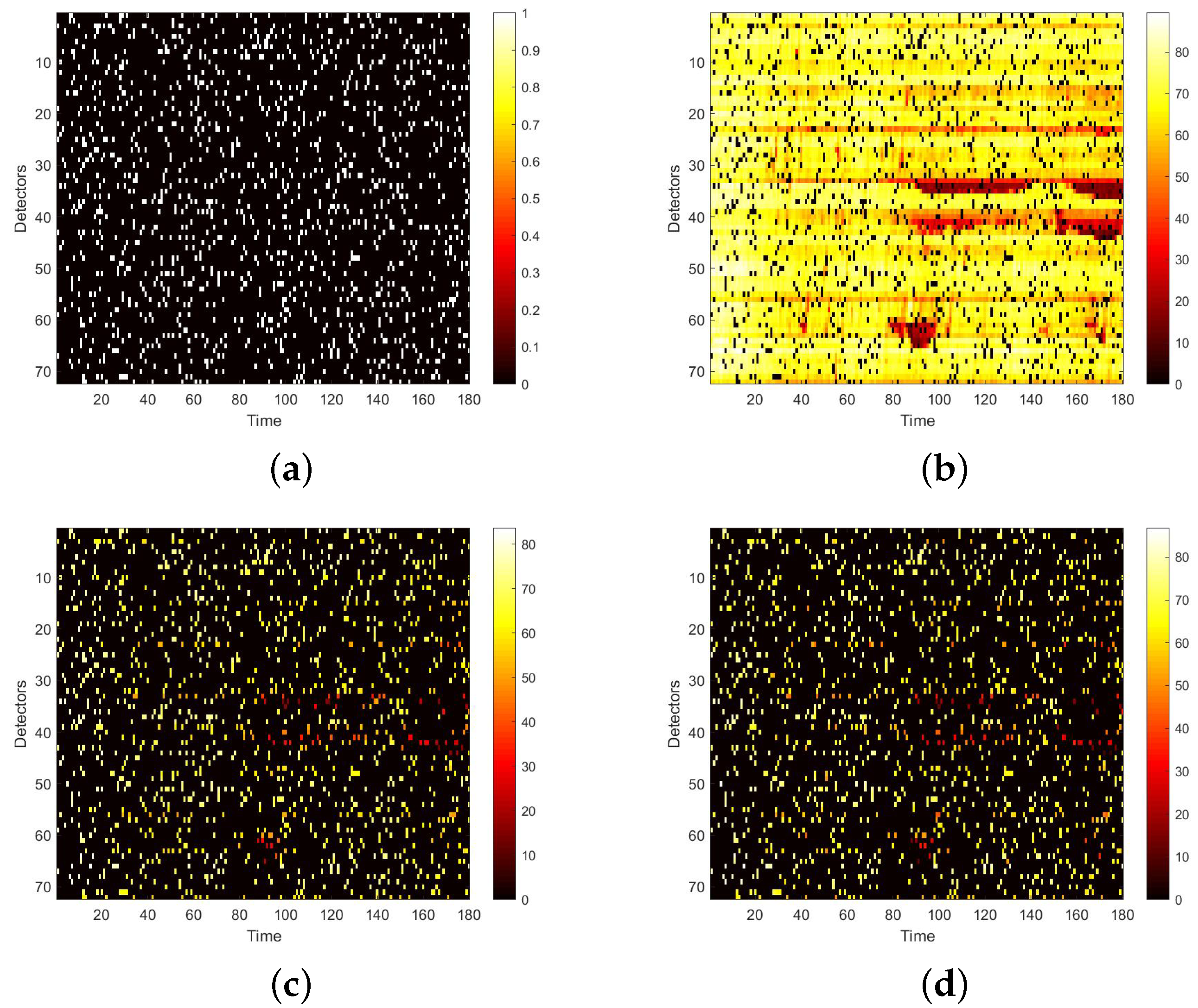
4.2. Damaged Data Set Generation
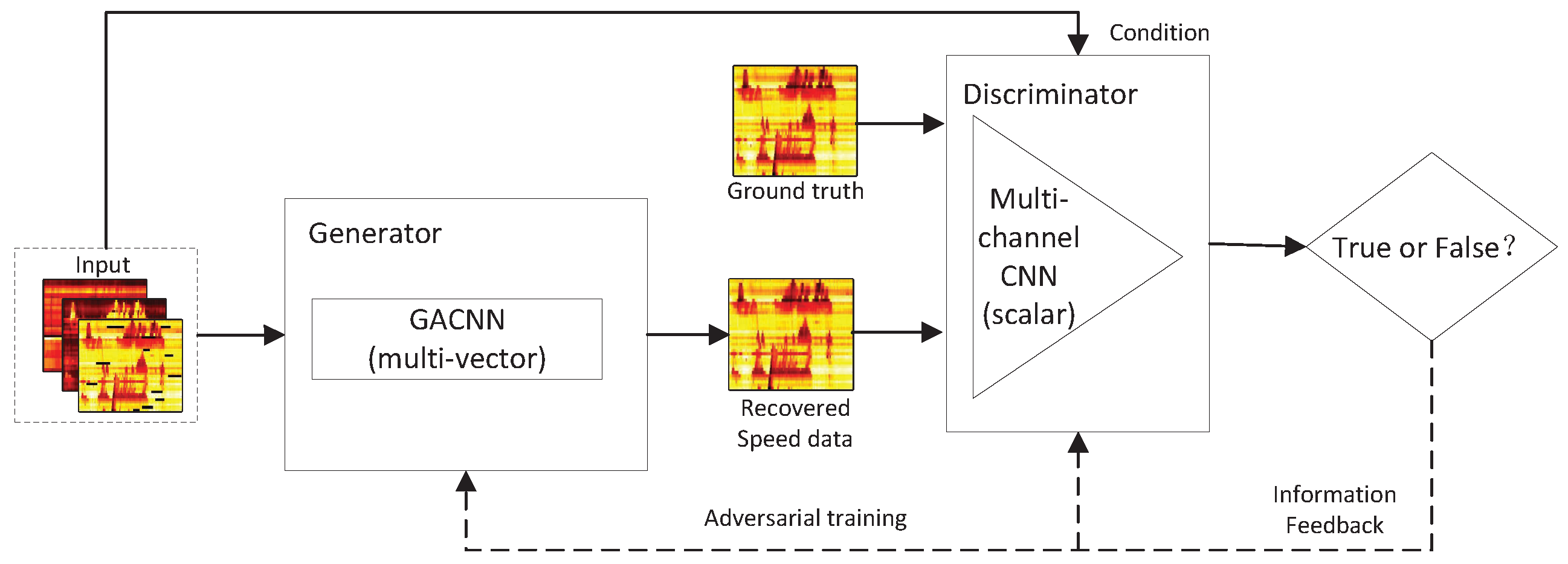
4.3. The GAGAN Model for Traffic Speed Recovery
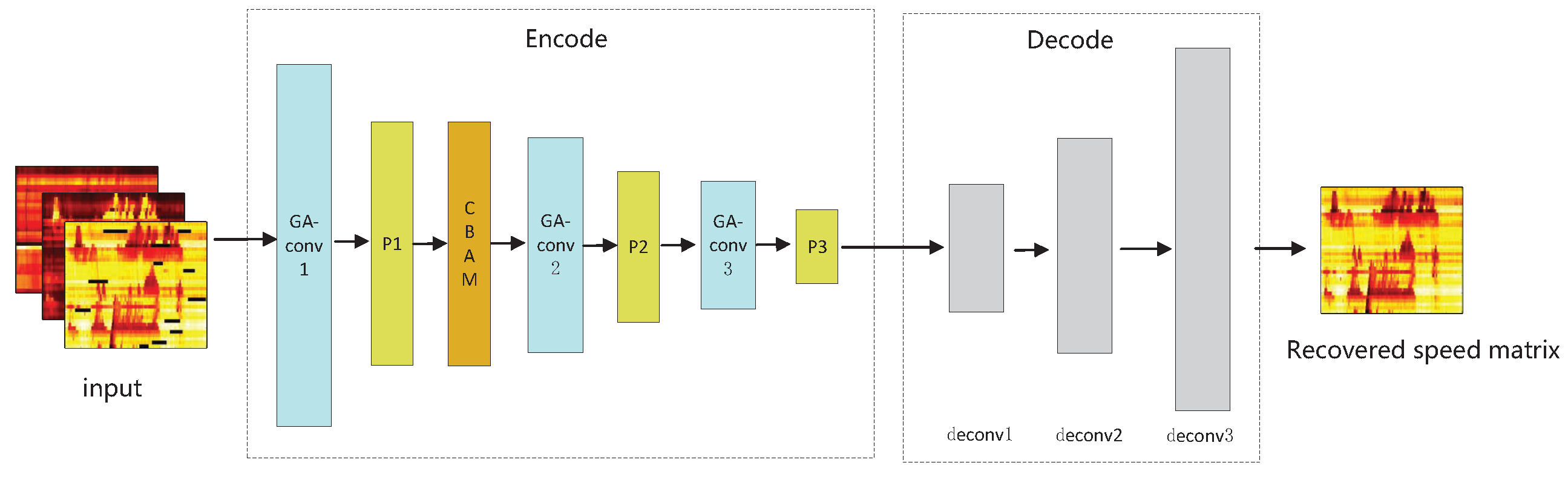
4.3.1. The Generator of GAGAN
4.3.2. The Discriminator Structure
4.3.3. Model Optimization
5. Experiment
5.1. Datasets and Settings
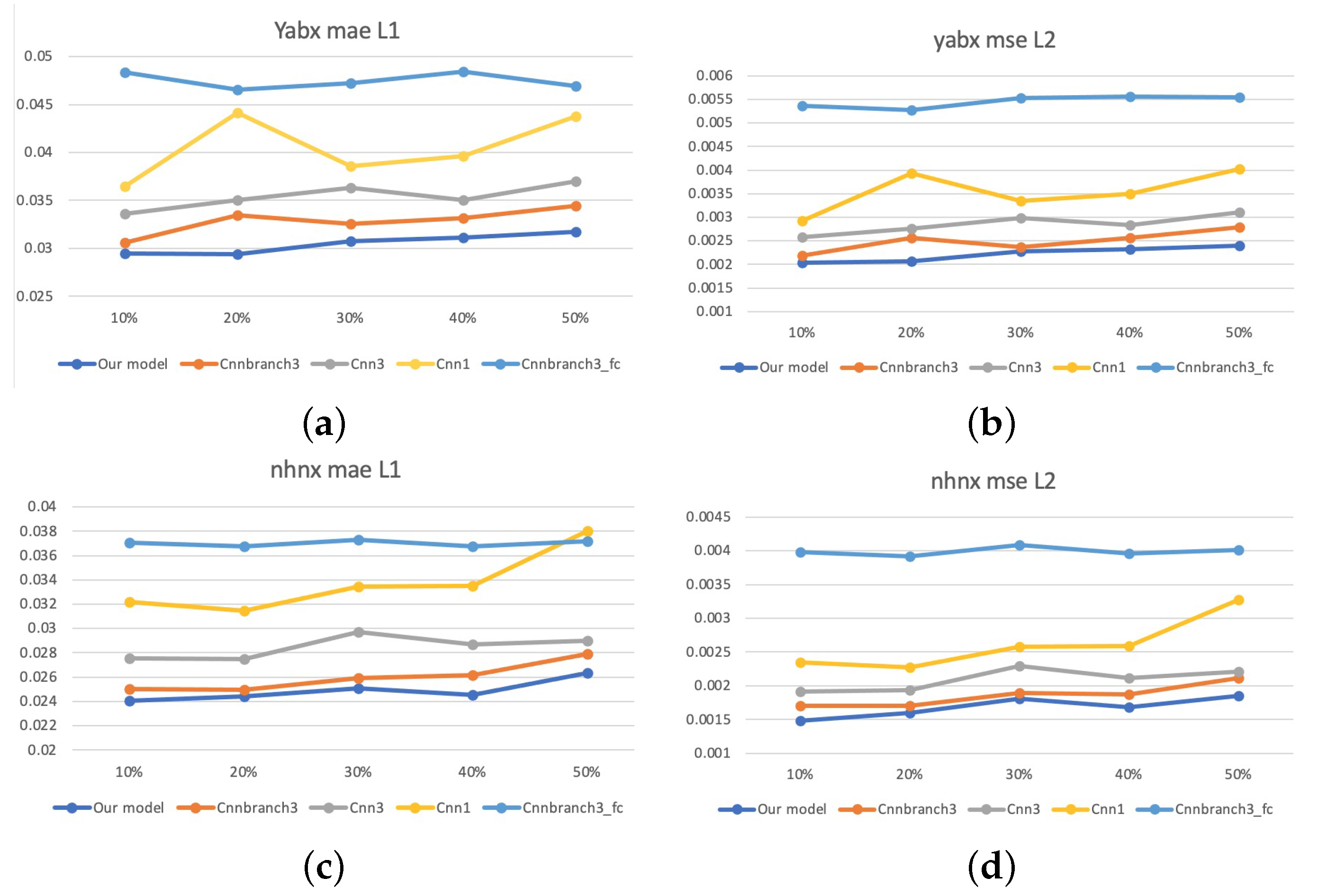
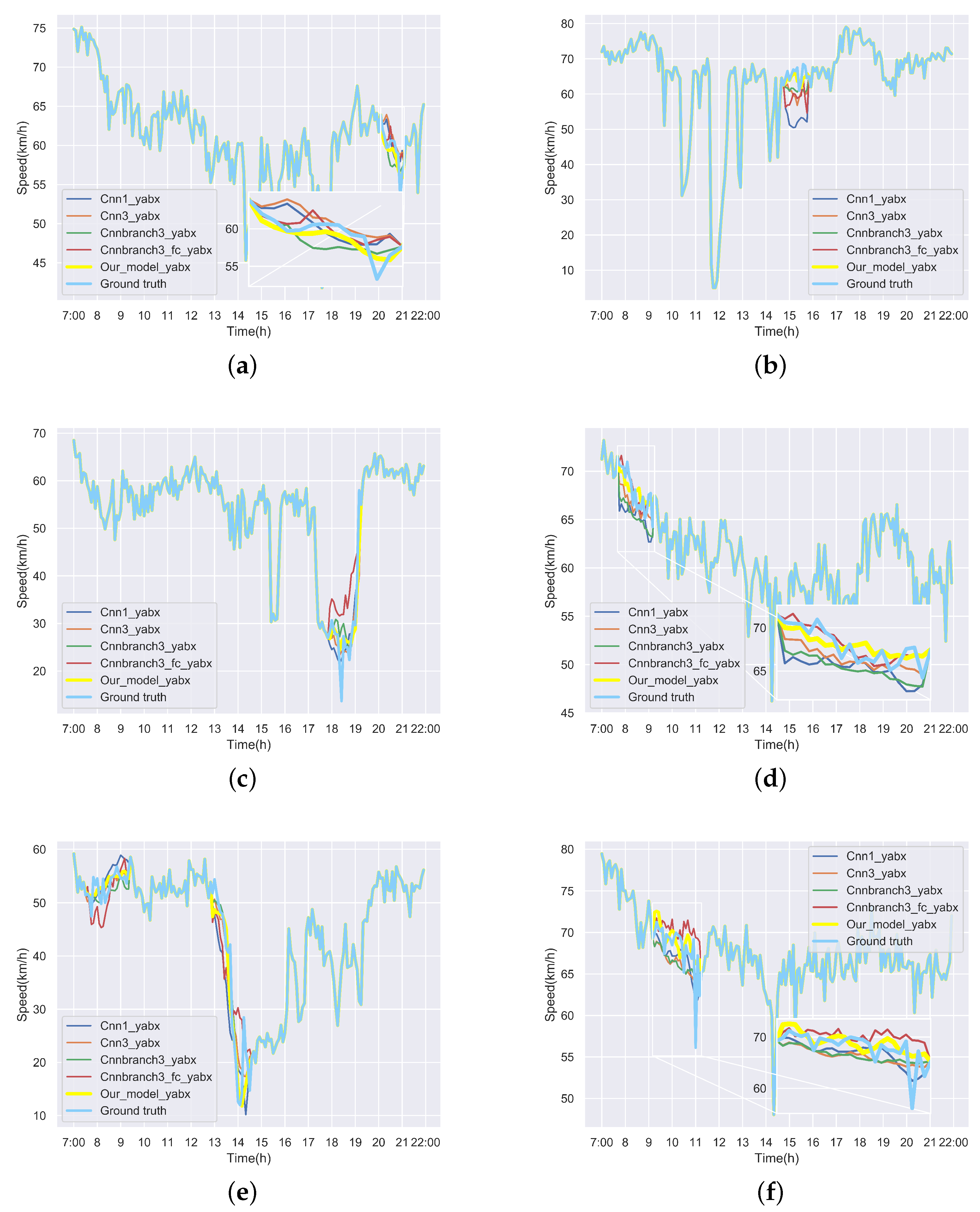
5.2. Results and Analysis
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Du, J.; Chen, H.; Zhang, W. A Deep Learning Method for Data Recovery in Sensor Networks Using Effective Spatio-Temporal Correlation Data. Sens. Rev. 2019, 39, 208–217. [Google Scholar] [CrossRef]
- Prasad, D.; Kapadni, K.; Gadpal, A.; Visave, M.; Sultanpure, K. HOG, LBP and SVM Based Traffic Density Estimation at Intersection. In Proceedings of the 2019 IEEE Pune Section International Conference (PuneCon), Pune, India, 18–20 December 2020. [Google Scholar]
- Yang, Z.; Liu, Y. Missing Traffic Flow Data Prediction Using Least Squares Support Vector Machines in Urban Arterial Streets. In Proceedings of the 2009 IEEE Symposium on Computational Intelligence and Data Mining, Nashville, TN, USA, 30 March–2 April 2009; pp. 76–83. [Google Scholar]
- Tak, S.; Woo, S.; Yeo, H. Data-Driven Imputation Method for Traffic Data in Sectional Units of Road Links. IEEE Trans. Intell. Transp. Syst. 2016, 17, 1762–1771. [Google Scholar] [CrossRef]
- Castro-Neto, M.; Jeong, Y.S.; Jeong, M.K.; Han, L.D. Online-Svr for Short-Term Traffic Flow Prediction under Typical and Atypical Traffic Conditions. Expert Syst. Appl. 2009, 36, 6164–6173. [Google Scholar] [CrossRef]
- Zhang, H.S.; Zhang, Y.; Li, Z.H.; Hu, D.C. Spatial-Temporal Traffic Data Analysis Based on Global Data Management Using Mas. IEEE Trans. Intell. Transp. Syst. 2004, 5, 267–275. [Google Scholar] [CrossRef]
- Qu, L.; Li, L.; Zhang, Y.; Hu, J. Ppca-Based Missing Data Imputation for Traffic Flow Volume: A Systematical Approach. IEEE Trans. Intell. Transp. Syst. 2009, 10, 512–522. [Google Scholar]
- Zhao, Q.; Zhou, G.; Zhang, L.; Cichocki, A.; Amari, S.I. Bayesian Robust Tensor Factorization for Incomplete Multiway Data. IEEE Trans. Neural Netw. Learn. Syst. 2014, 27, 736–748. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Li, Q.; Yi, Z.; Hu, J.; Jia, L.; Li, L. A Bpca Based Missing Value Imputing Method for Traffic Flow Volume Data. In Proceedings of the 2008 IEEE Intelligent Vehicles Symposium, Eindhoven, Netherlands, 4–6 June 2008. [Google Scholar]
- Chen, X.; He, Z.; Sun, L. A Bayesian Tensor Decomposition Approach for Spatiotemporal Traffic Data Imputation. Transp. Res. Part C Emerg. Technol. 2019, 98, 73–84. [Google Scholar] [CrossRef]
- Zhou, H.; Zhang, D.; Xie, K.; Chen, Y. Robust Spatio-Temporal Tensor Recovery for Internet Traffic Data. In Proceedings of the 2016 IEEE Trustcom/BigDataSE/I SPA, Tianjin, China, 23–26 August 2016. [Google Scholar]
- Liang, X. Applied Deep Learning in Intelligent Transportation Systems and Embedding Exploration; New Jersey Institute of Technology: Newark, NJ, USA, 2019. [Google Scholar]
- Ma, X.; Dai, Z.; He, Z.; Ma, J.; Wang, Y.; Wang, Y. Learning Traffic as Images: A Deep Convolutional Neural Network for Large-Scale Transportation Network Speed Prediction. Sensors 2017, 17, 818. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Dong, C.; Loy, C.C.; He, K.; Tang, X. Image Super-Resolution Using Deep Convolutional Networks. IEEE Trans. Pattern Anal. Mach. Intell. 2015, 38, 295–307. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Mudavathu, K.D.B.; Rao, M.V.P.C.S.; Ramana, K.V. Auxiliary Conditional Generative Adversarial Networks for Image Data Set Augmentation. In Proceedings of the 2018 3rd International Conference on Inventive Computation Technologies (ICICT), Coimbatore, India, 15–16 November 2018. [Google Scholar]
- Hussein, S.A.; Tirer, T.; Giryes, R. Image-Adaptive Gan Based Reconstruction. In Proceedings of the AAAI Conference on Artificial Intelligence, New York, NY, USA, 7–12 February 2020. [Google Scholar]
- Oprea, S.; Martinez-Gonzalez, P.; Garcia-Garcia, A.; Castro-Vargas, J.A.; Orts-Escolano, S.; Garcia-Rodriguez, J.; Argyros, A. A Review on Deep Learning Techniques for Video Prediction. IEEE Trans. Pattern Anal. Mach. Intell. 2020, 1. [Google Scholar] [CrossRef] [PubMed]
- Kwon, H.; Ko, K.; Kim, S. Optimized Adversarial Example with Classification Score Pattern Vulnerability Removed. IEEE Access 2021, 1. [Google Scholar] [CrossRef]
- He, M.; Luo, X.; Wang, Z.; Yang, F.; Qian, H.; Hua, C. Global Traffic State Recovery Via Local Observations with Generative Adversarial Networks. In Proceedings of the ICASSP 2020–2020 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Barcelona, Spain, 4–8 May 2020. [Google Scholar]
- Arora, S.; Ge, R.; Liang, Y.; Ma, T.; Zhang, Y. Generalization and Equilibrium in Generative Adversarial Nets (Gans). In Proceedings of the International Conference on Machine Learning, Sydney, Australia, 6–11 August 2017. [Google Scholar]
- Zhao, H.; Li, T.; Xiao, Y.; Wang, Y. Improving Multi-Agent Generative Adversarial Nets with Variational Latent Representation. Entropy 2020, 22, 1055. [Google Scholar] [CrossRef] [PubMed]
- Yeh, R.A.; Chen, C.; Lim, T.Y.; Schwing, A.G.; Hasegawa-Johnson, M.; Do, M.N. Semantic Image Inpainting with Deep Generative Models. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017. [Google Scholar]
- Yoon, J.; Jordon, J.; Schaar, M. Gain: Missing Data Imputation Using Generative Adversarial Nets. In Proceedings of the International Conference on Machine Learning, Stockholm, Sweden, 14–15 July 2018. [Google Scholar]
- Arif, M.; Wang, G.; Chen, S. Deep Learning with Non-Parametric Regression Model for Traffic Flow Prediction. In Proceedings of the 2018 IEEE 16th International Conference on Dependable, Autonomic and Secure Computing, 16th International Conference on Pervasive Intelligence and Computing, 4th International Conference on Big Data Intelligence and Computing and Cyber Science and Technology Congress (DASC/PiCom/DataCom/CyberSciTech), Athens, Greece, 12–15 August 2018. [Google Scholar]
- Tran, D.; Bourdev, L.; Fergus, R.; Torresani, L.; Paluri, M. Learning Spatiotemporal Features with 3d Convolutional Networks. In Proceedings of the IEEE International Conference on Computer Vision, Santiago, Chile, 7–13 December 2015. [Google Scholar]
- Xie, K.; Wang, L.; Wang, X.; Xie, G.; Wen, J.; Zhang, G.; Cao, J.; Zhang, D. Accurate Recovery of Internet Traffic Data: A Sequential Tensor Completion Approach. IEEE/ACM Trans. Netw. 2018, 26, 793–806. [Google Scholar] [CrossRef]
- Chen, Y.; Lv, Y.; Wang, F. Traffic Flow Imputation Using Parallel Data and Generative Adversarial Networks. IEEE Trans. Intell. Transp. Syst. 2019, 21, 1624–1630. [Google Scholar] [CrossRef]
- Yang, B.; Kang, Y.; Yuan, Y.; Li, H.; Wang, F. St-Fvgan: Filling Series Traffic Missing Values with Generative Adversarial Network. Transp. Lett. 2021, 1–9. [Google Scholar] [CrossRef]
- Ablamowicz, R.; Parra, J.; Lounesto, P. Clifford Algebras with Numeric and Symbolic Computations; Springer Science & Business Media: Berlin/Heidelberg, Germany, 1996. [Google Scholar]
- Hestenes, D.; Li, H.; Rockwood, A. New Algebraic Tools for Classical Geometry. In Geometric Computing with Clifford Algebras; Springer: Berlin/Heidelberg, Germany, 2001. [Google Scholar]
- Doran, C.J.L. Geometric Algebra and Its Application to Mathematical Physics. Ph.D. Thesis, University of Cambridge, Cambridge, UK, 1994. [Google Scholar]
- Goodfellow, I.; Pouget-Abadie, J.; Mirza, M.; Xu, B.; Warde-Farley, D.; Ozair, S.; Courville, A.; Bengio, Y. Generative Adversarial Nets. Adv. Neural Inf. Process. Syst. 2014, 27. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 1 | ||||||||
|---|---|---|---|---|---|---|---|---|
| 1 | 1 | |||||||
| 1 | ||||||||
| 1 | ||||||||
| 1 | ||||||||
| Layers | Name | Description |
|---|---|---|
| 1 | GA-conv Layer1 | 32 kernels of size 3 × 3 × 1 |
| 2 | Pooling1 | kernels of size 2 × 2 |
| 3 | CBAM | attention module |
| 4 | GA-conv Layer2 | 64 kernels of size 3 × 3 × 32 |
| 5 | Pooling2 | kernels of size 2 × 2 |
| 6 | GA-conv Layer3 | 64 kernels of size 3 × 3 × 64 |
| 7 | Pooling3 | kernels of size 2 × 2 |
| 8 | deconv Layer1 | 64 kernels of size 3 × 3 × 64 |
| 9 | deconv Layer2 | 64 kernels of size 3 × 3 × 32 |
| 10 | deconv Layer3 | 32 kernels of size 3 × 3 × 1 |
| Layers | Name | Description |
|---|---|---|
| 1 | convolution1 | 32 kernels of size 5 × 5 × 31 |
| 2 | pooling1 | kernels of size 2 × 2 |
| 3 | convolution2 | 64 kernels of size 3 × 3 × 32 |
| 4 | pooling2 | kernels of size 2 × 2 |
| 5 | FC1 | 128 neuron nodes |
| 6 | FC2 | 1 neuron nodes |
| Models | L1 | L2 |
|---|---|---|
| Our model | 0.03264 | 0.00259 |
| Cnnbranch3 | 0.03495 | 0.00271 |
| Cnn3 | 0.03960 | 0.00357 |
| Cnn1 | 0.05014 | 0.00573 |
| Cnnbranch3fc | 0.05198 | 0.00636 |
| Models | L1 | L2 |
|---|---|---|
| Our model | 0.02616 | 0.00180 |
| Cnnbranch3 | 0.02995 | 0.00254 |
| Cnn3 | 0.03741 | 0.00312 |
| Cnn1 | 0.04830 | 0.00490 |
| Cnnbranch3fc | 0.04034 | 0.00399 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zang, D.; Ding, Y.; Qu, X.; Miao, C.; Chen, X.; Zhang, J.; Tang, K. Traffic-Data Recovery Using Geometric-Algebra-Based Generative Adversarial Network. Sensors 2022, 22, 2744. https://doi.org/10.3390/s22072744
Zang D, Ding Y, Qu X, Miao C, Chen X, Zhang J, Tang K. Traffic-Data Recovery Using Geometric-Algebra-Based Generative Adversarial Network. Sensors. 2022; 22(7):2744. https://doi.org/10.3390/s22072744
Chicago/Turabian StyleZang, Di, Yongjie Ding, Xiaoke Qu, Chenglin Miao, Xihao Chen, Junqi Zhang, and Keshuang Tang. 2022. "Traffic-Data Recovery Using Geometric-Algebra-Based Generative Adversarial Network" Sensors 22, no. 7: 2744. https://doi.org/10.3390/s22072744
APA StyleZang, D., Ding, Y., Qu, X., Miao, C., Chen, X., Zhang, J., & Tang, K. (2022). Traffic-Data Recovery Using Geometric-Algebra-Based Generative Adversarial Network. Sensors, 22(7), 2744. https://doi.org/10.3390/s22072744