
Acoustic Emission Signal Fault Diagnosis Based on Compressed Sensing for RV Reducer


Abstract
:1. Introduction
- (1)
- The combination of CS technology and AE signal not only retains most of the effective information, but also greatly reduces the amount of data of AE signal;
- (2)
- According to CS, the transform matrix of wavelet packet decomposition in compressed domain was derived, which was used to decompose the compressed signal, extracting the compressed domain signals of different frequency bands;
- (3)
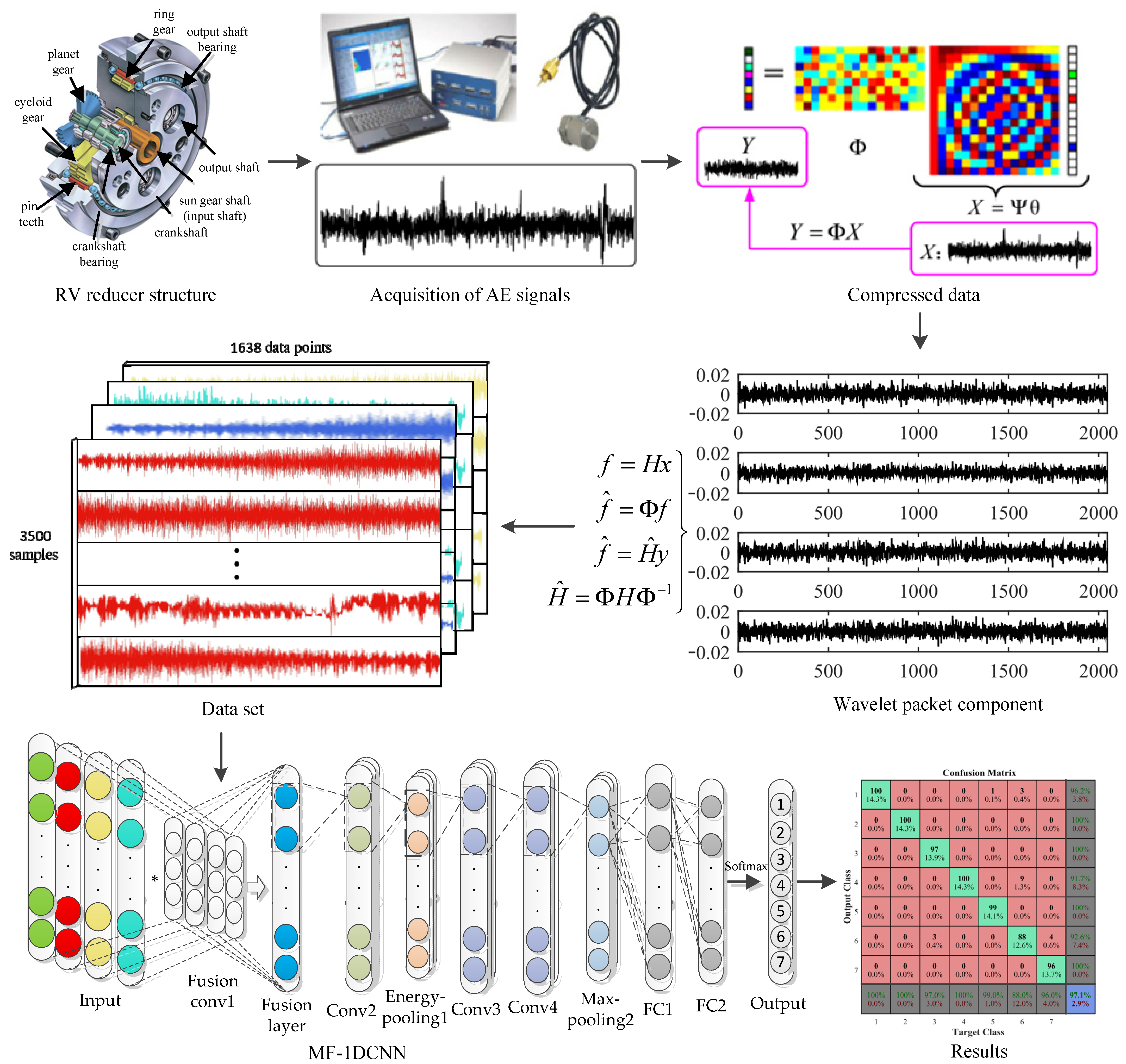
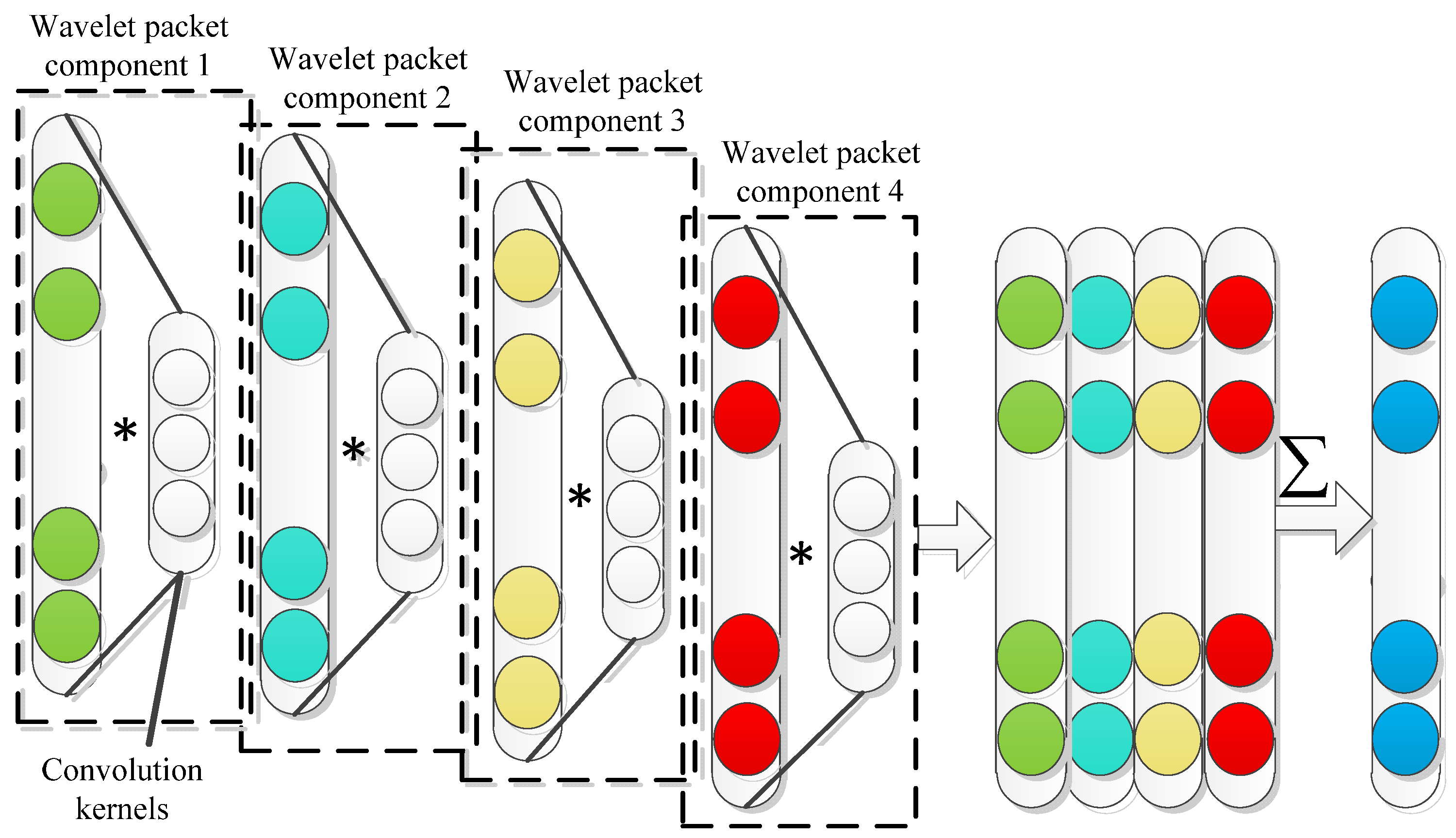
- The data layer fusion method based on multi-channel fusion convolutional neural network (MF-CNN) model takes the obtained frequency band information as the input signal of a multi-channel convolution layer, which can effectively mine the features of different frequency bands and avoid the uncertain of diagnosis results caused by subjectively selecting the features information of different frequency bands;
- (4)
- The energy features of information are extracted through the energy pooling layer to improve the ability of one-dimensional convolutional neural network (1-DCNN) to explore the energy features of signal and fully mine the hidden features of data.
2. Theoretical Background
2.1. Compressed Sensing Theory
2.2. Random Projection Energy Preservation Property
2.3. Transformation Matrix of Wavelet Packet Decomposition in Compressed Domain
3. One-Dimensional Convolutional Neural Network (1-DCNN)
3.1. Multi-Channel Fusion Convolutional Layer
3.2. Energy Pooling Layer
3.3. Fully Connected Layer
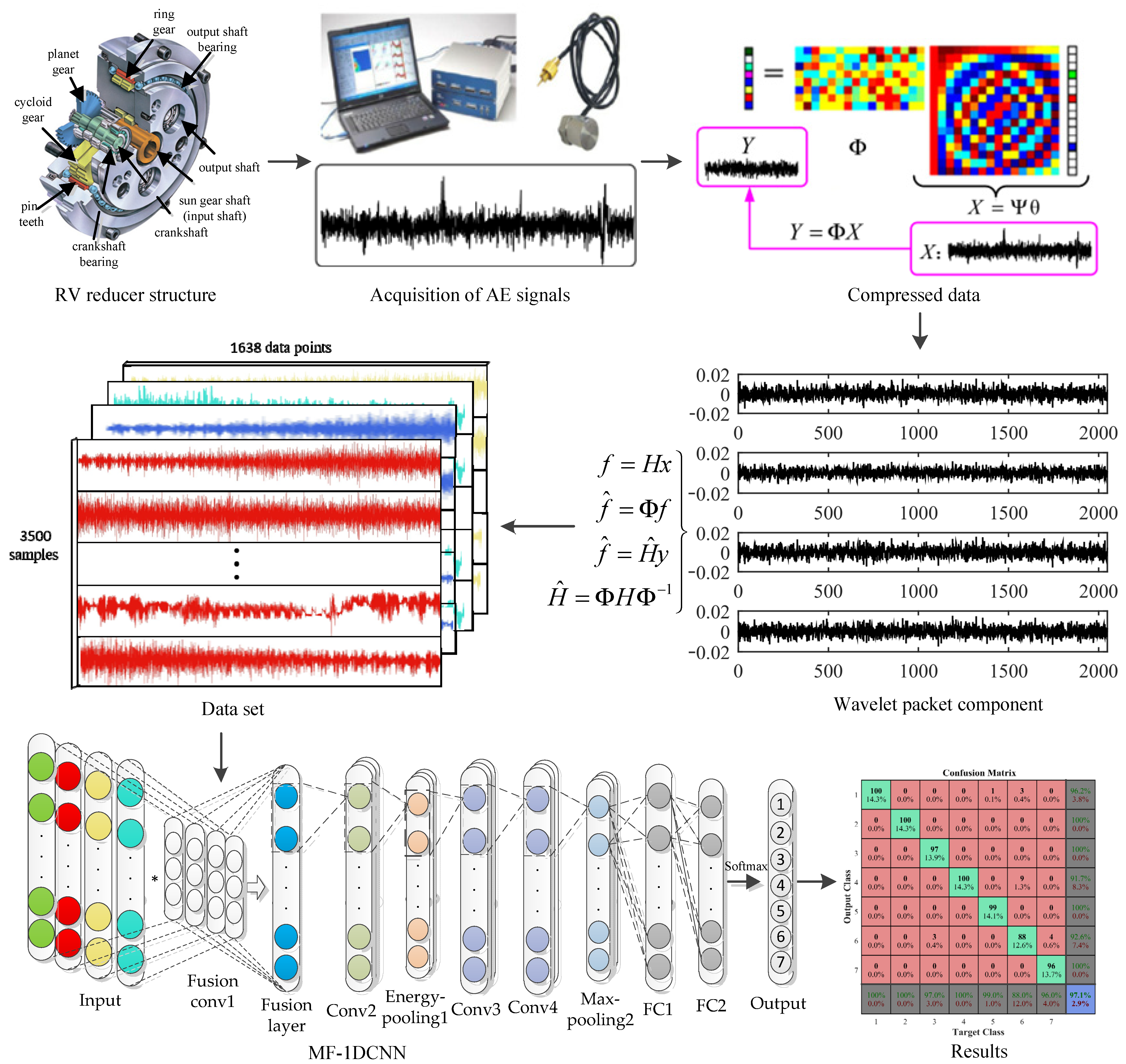
4. Fault Diagnosis Method of AE Signal of RV Reducer
5. Experimental Verification and Result Analysis
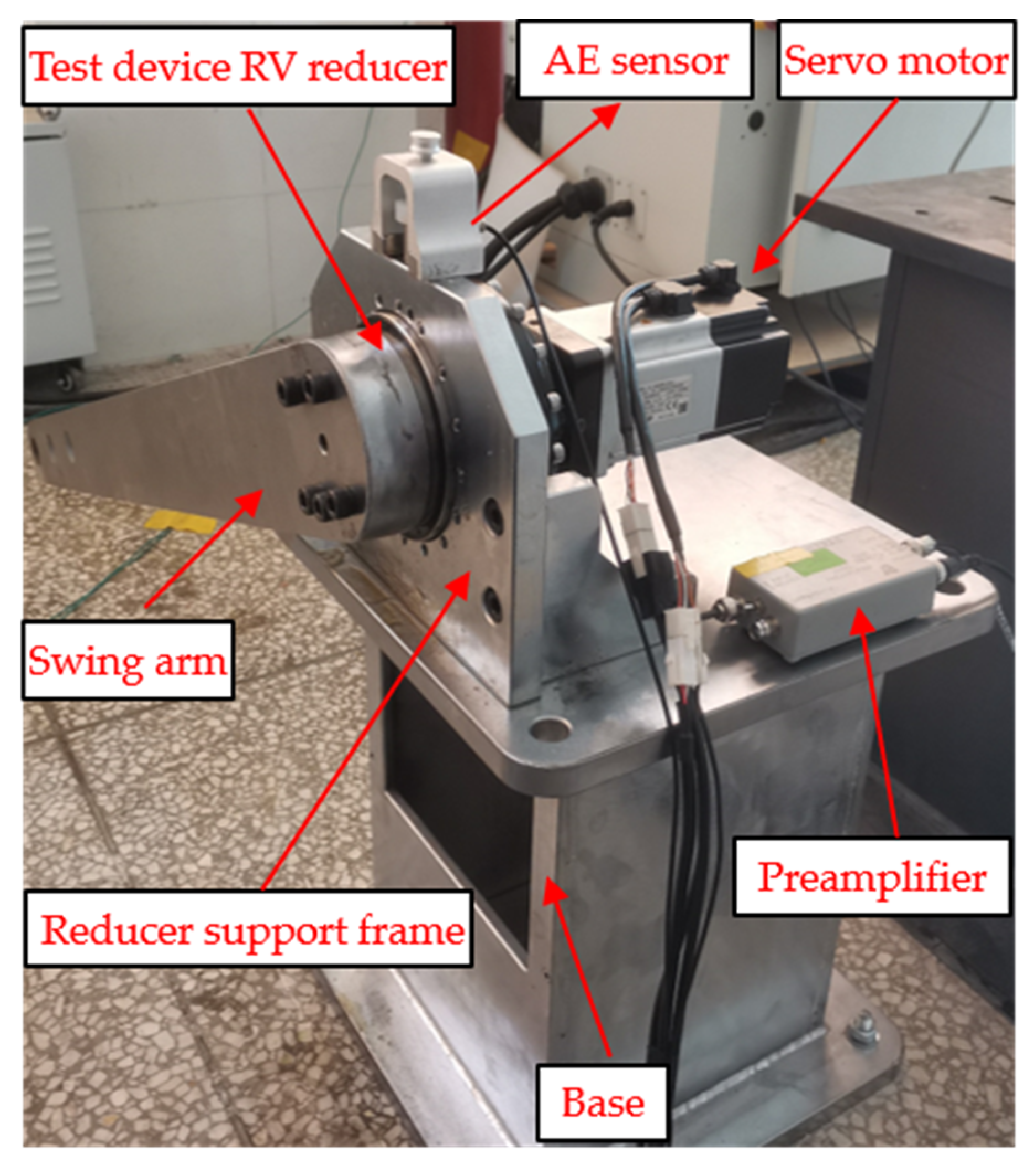
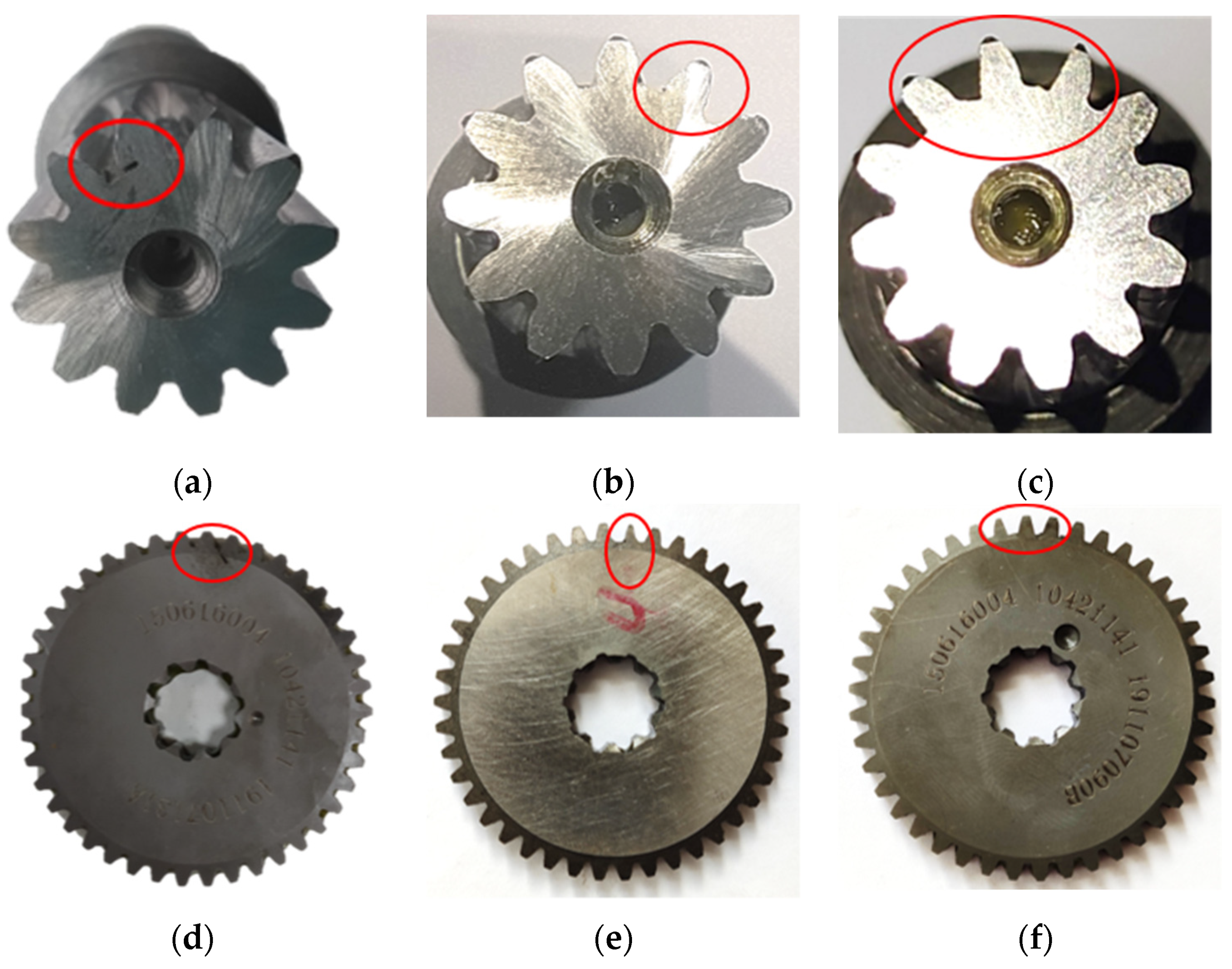
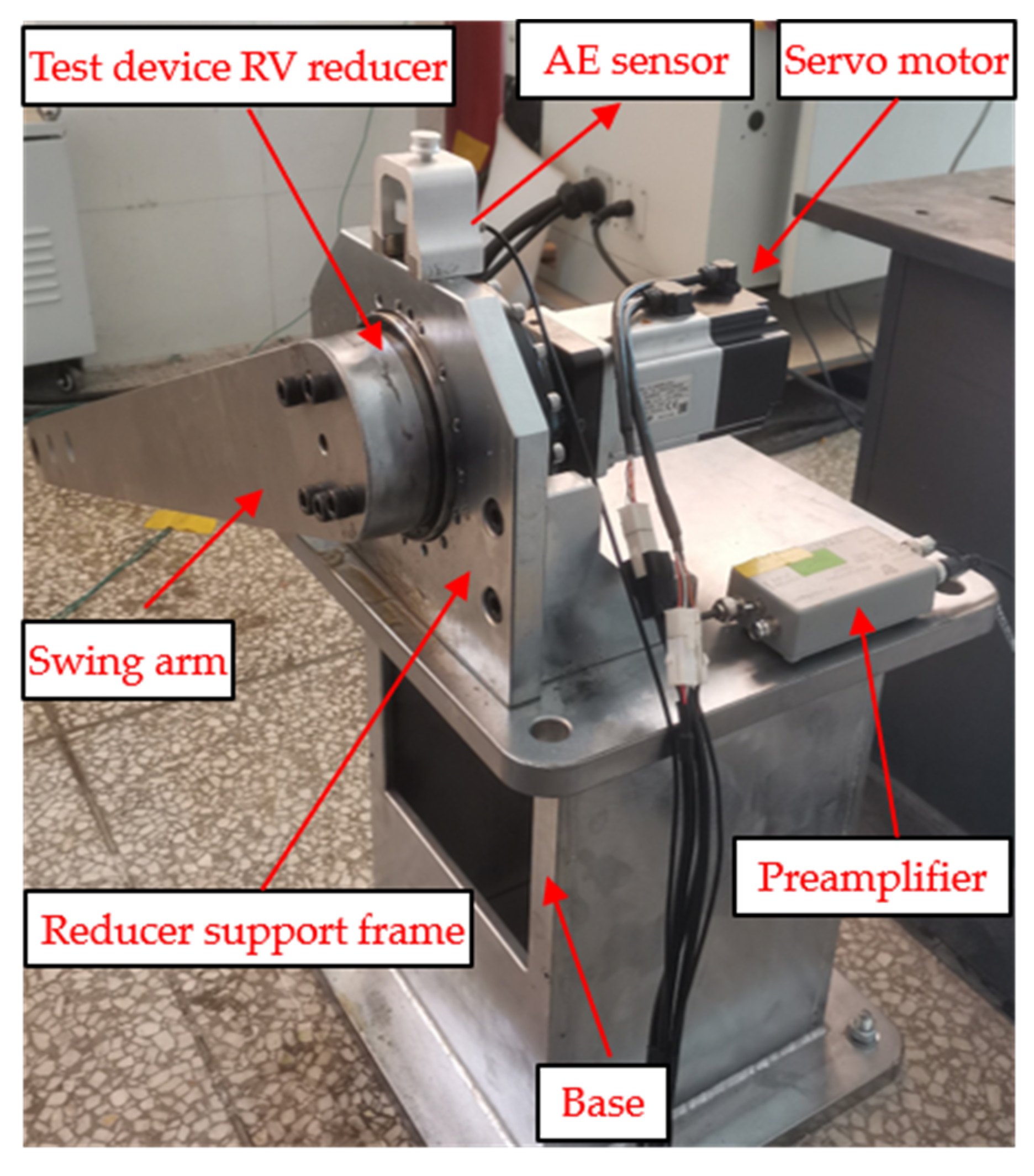
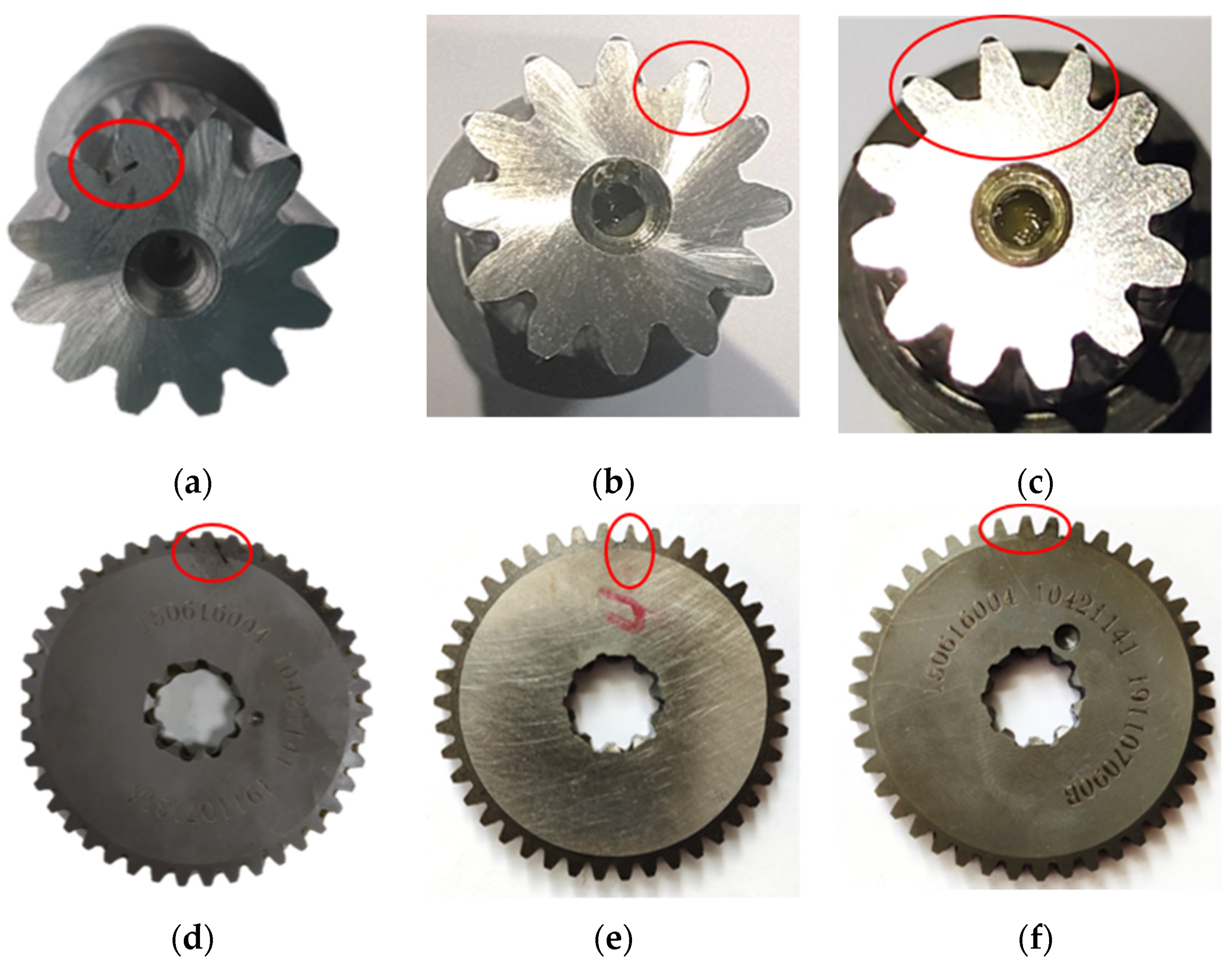
5.1. Experimental Device and Data Description
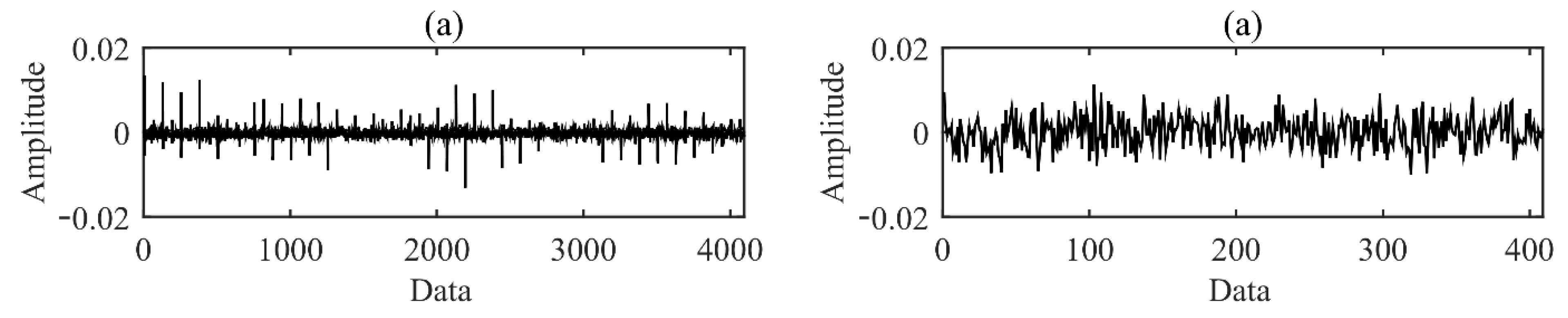
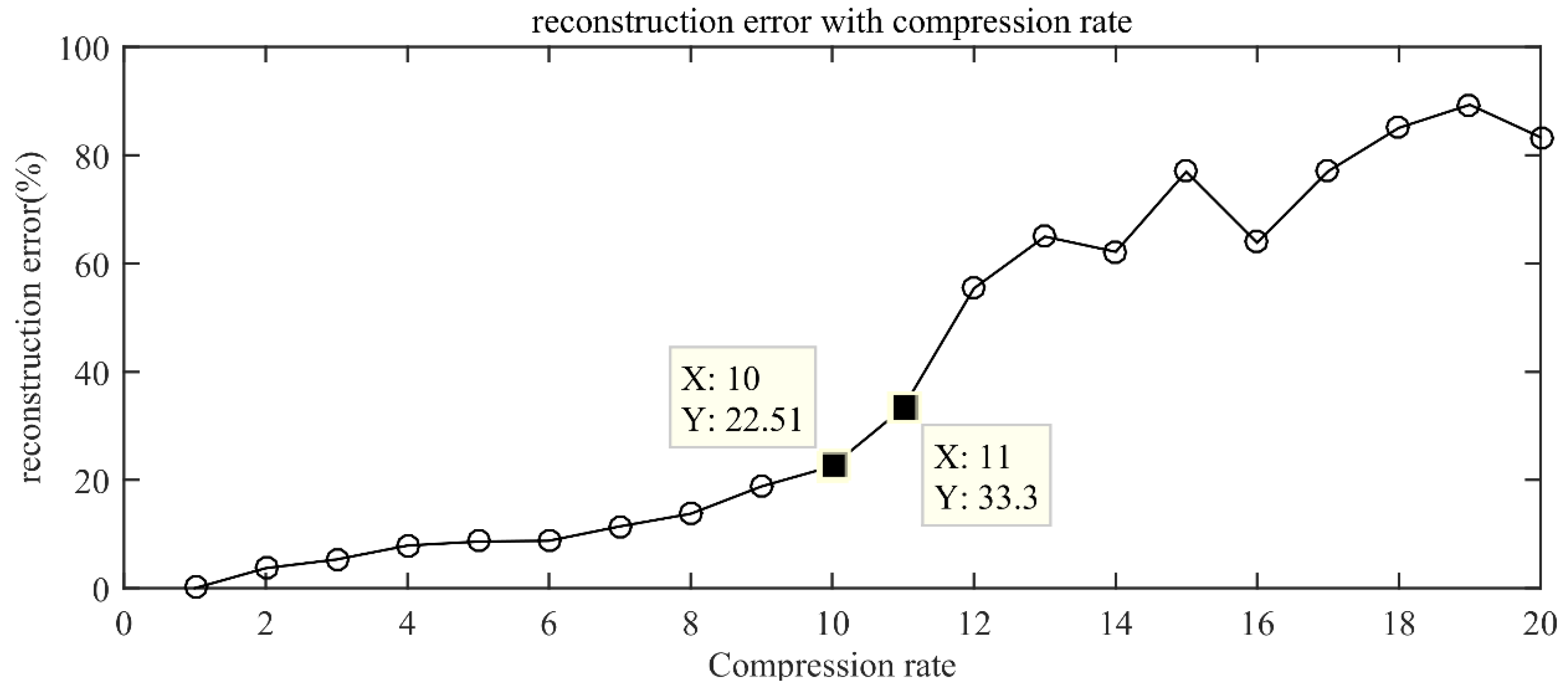
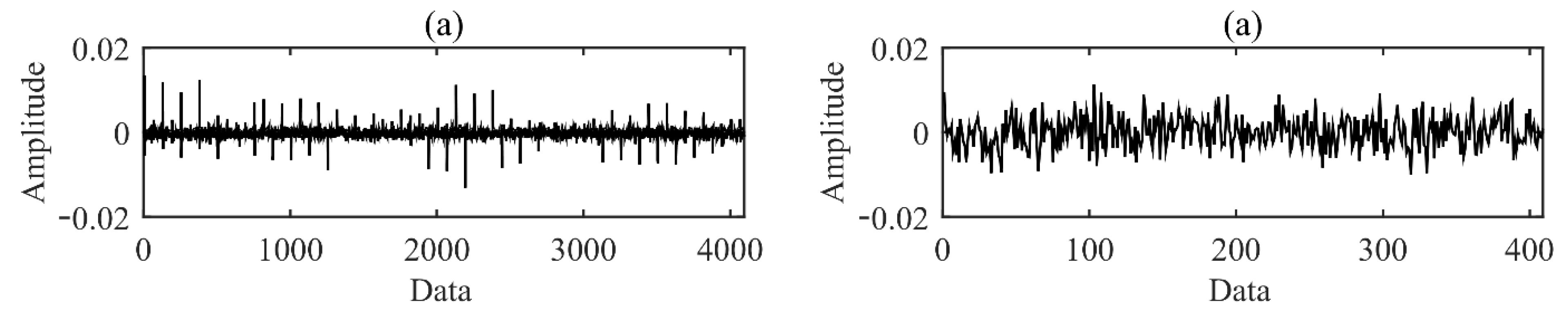
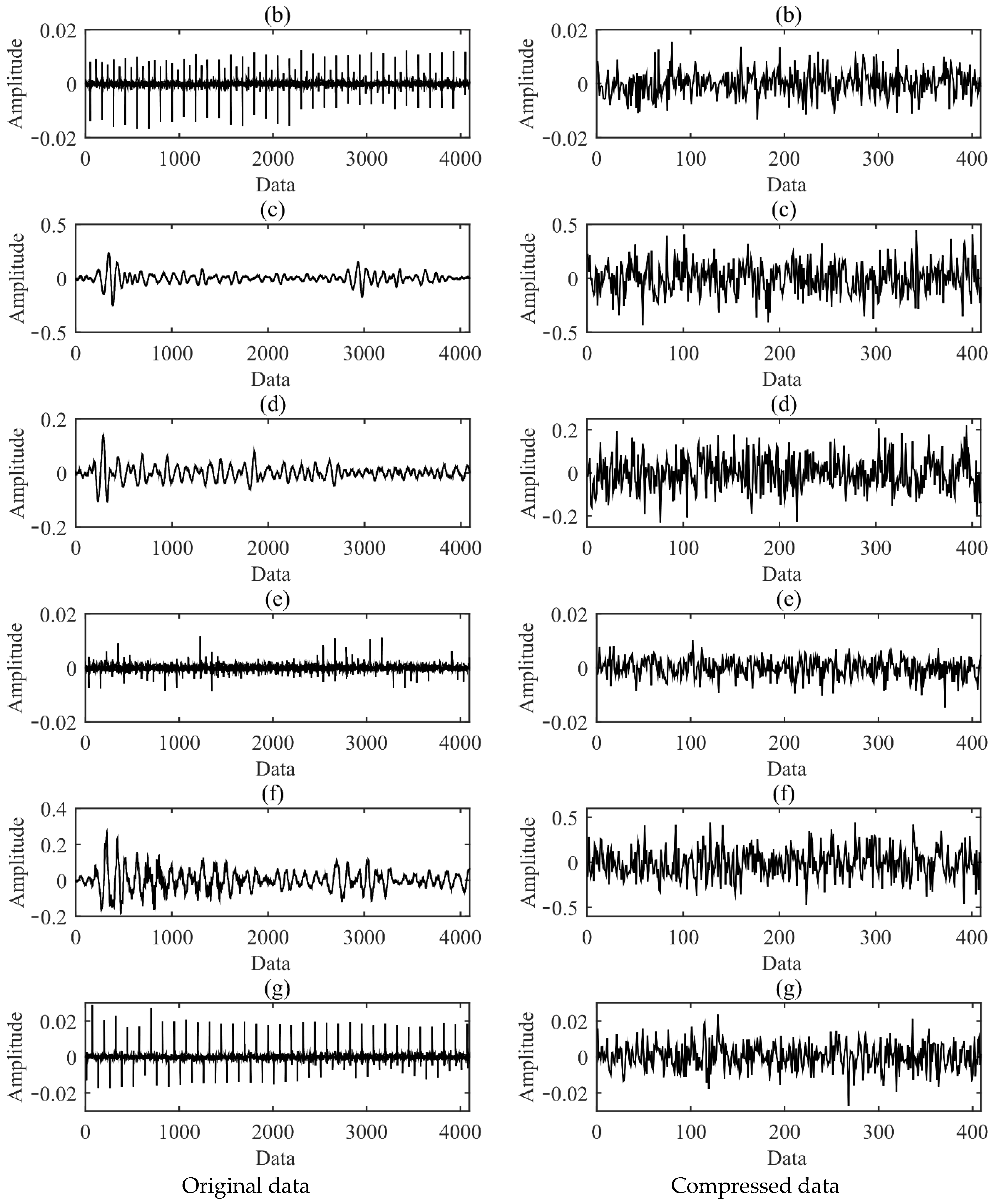
5.2. Signal Compression and Reconstruction Verification
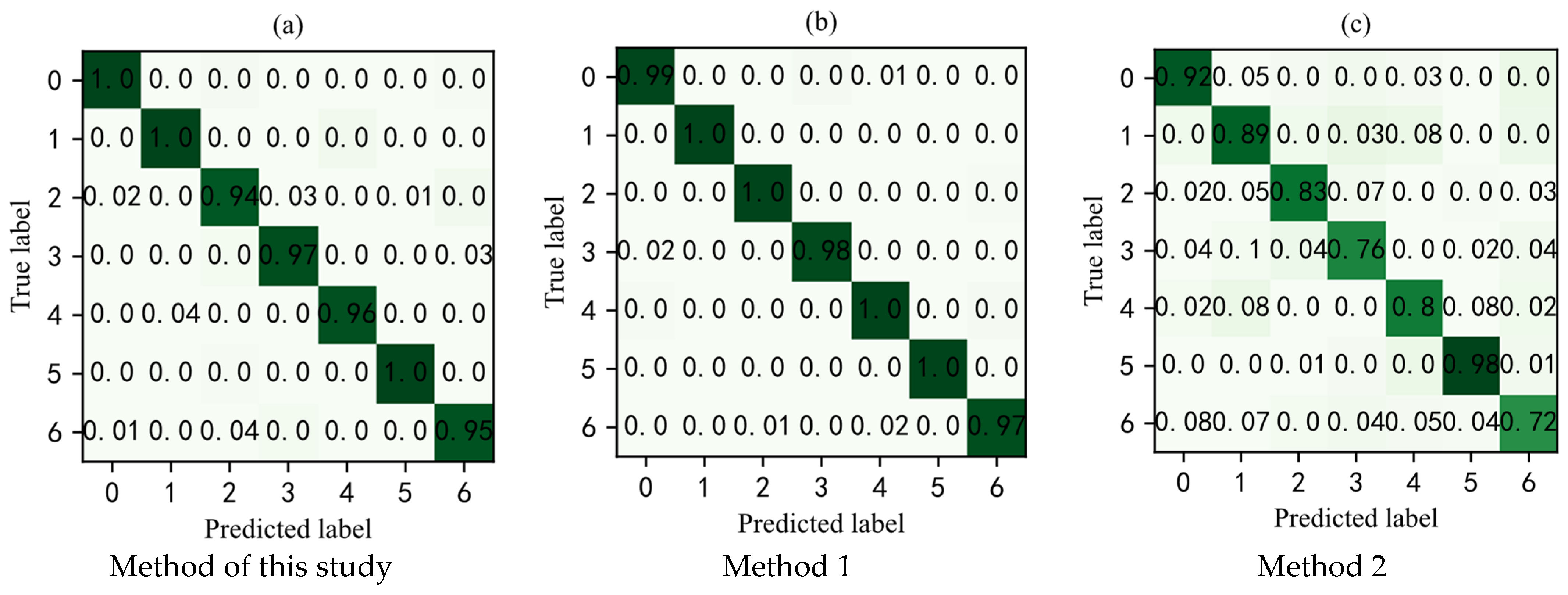
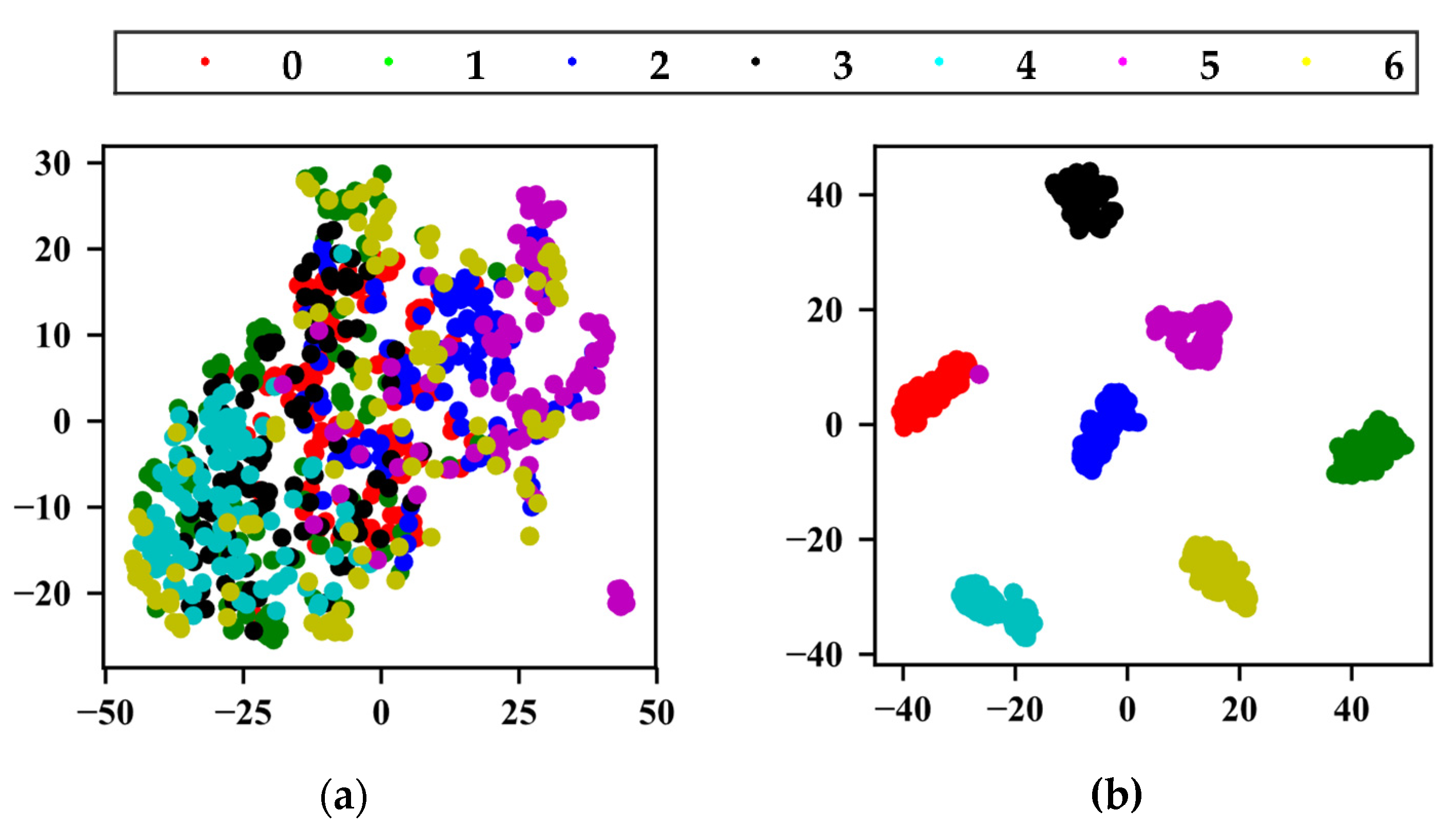
5.3. Experimental Results and Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Jiang, Z.; Zhang, X.; Liu, J. A reliability evaluation method for RV reducer by combining multi-fidelity model and Bayesian updating technology. IOP Conf. Ser. Mater. Sci. Eng. 2021, 1043, 052038. [Google Scholar] [CrossRef]
- Zhi, H.; Yangi, S. Remote performance evaluation, life prediction and fault diagnosis of RV reducer for industrial robot. J. Phys. Conf. Ser. 2020, 1676, 012212. [Google Scholar] [CrossRef]
- Feng, Z.; Liang, M.; Zhang, Y.; Hou, S. Fault diagnosis for wind turbine planetary gearboxes via demodulation analysis based on ensemble empirical mode decomposition and energy separation. Renew. Energy 2012, 47, 112–126. [Google Scholar] [CrossRef]
- Wu, Z.; Zhang, Q.; Cheng, L.; Tan, S. A New Method of Two-stage Planetary Gearbox Fault Detection Based on Multi-Sensor Information Fusion. Appl. Sci. 2019, 9, 5443. [Google Scholar] [CrossRef] [Green Version]
- An, H.; Liang, W.; Zhang, Y.; Li, Y.; Liang, Y.; Tan, J. Rotate Vector Reducer Crankshaft Fault Diagnosis Using Acoustic Emission Techniques. In Proceedings of the 2017 5th International Conference on Enterprise Systems (ES), Beijing, China, 22–24 September 2017; pp. 294–298. [Google Scholar]
- Komijani, M.; Gracie, R.; Sarvaramini, E. Simulation of induced acoustic emission in fractured porous media. Eng. Fract. Mech. 2019, 210, 113–131. [Google Scholar] [CrossRef]
- Zheng, Y.; Zhou, Y.; Zhou, Y.; Pan, T.; Sun, L.; Liu, D. Localized corrosion induced damage monitoring of large-scale RC piles using acoustic emission technique in the marine environment. Constr. Build. Mater. 2020, 243, 118270. [Google Scholar] [CrossRef]
- Zhang, Y.; Lu, W.; Chu, F. Planet gear fault localization for wind turbine gearbox using acoustic emission signals. Renew. Energy 2017, 109, 449–460. [Google Scholar] [CrossRef]
- Duan, F.; Elasha, F.; Greaves, M.; Mba, D. Helicopter main gearbox bearing defect identification with acoustic emission techniques. In Proceedings of the 2016 IEEE International Conference on Prognostics and Health Management (ICPHM), Ottawa, ON, Canada, 20–22 June 2016; pp. 1–4. [Google Scholar]
- Donoho, D.L. Compressed sensing. IEEE Trans. Inf. Theory 2006, 52, 1289–1306. [Google Scholar] [CrossRef]
- Candes, E.J.; Wakin, M.B. An Introduction To Compressive Sampling. IEEE Signal Process. Mag. 2008, 25, 21–30. [Google Scholar] [CrossRef]
- Guo, D.; Qu, X.; Xiao, M.; Yao, Y. Comparative Analysis on Transform and Reconstruction of Compressed Sensing in Sensor Networks. In Proceedings of the 2009 WRI International Conference on Communications and Mobile Computing, Kunming, China, 6–8 January 2009; pp. 441–445. [Google Scholar]
- Wang, Y.; Xiang, J.; Mo, Q.; He, S. Compressed sparse time–frequency feature representation via compressive sensing and its applications in fault diagnosis. Measurement 2015, 68, 70–81. [Google Scholar] [CrossRef]
- Cheng, Z.; Hu, N.; Liang, X.; Liu, L. Health indicator extraction based on sparse representation of vibration signal for planetary gearbox. In Proceedings of the 2016 Prognostics and System Health Management Conference (PHM-Chengdu), Chengdu, China, 19–21 October 2016; pp. 1–4. [Google Scholar]
- Liu, C.; Wu, X.; Mao, J.; Liu, X. Acoustic emission signal processing for rolling bearing running state assessment using compressive sensing. Mech. Syst. Signal Process. 2017, 91, 395–406. [Google Scholar] [CrossRef]
- Ham, S.; Han, S.-Y.; Kim, S.; Park, H.; Park, K.-J.; Choi, J.-H. A Comparative Study of Fault Diagnosis for Train Door System: Traditional versus Deep Learning Approaches. Sensors 2019, 19, 5160. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Li, S.; Wang, H.; Song, L.; Wang, P.; Cui, L.; Lin, T. An adaptive data fusion strategy for fault diagnosis based on the convolutional neural network. Measurement 2020, 165, 108122. [Google Scholar] [CrossRef]
- Chen, R.; Huang, X.; Yang, L.; Xu, X.; Zhang, X.; Zhang, Y. Intelligent fault diagnosis method of planetary gearboxes based on convolution neural network and discrete wavelet transform. Comput. Ind. 2019, 106, 48–59. [Google Scholar] [CrossRef]
- Peng, P.; Wang, J. NOSCNN: A robust method for fault diagnosis of RV reducer. Measurement 2019, 138, 652–658. [Google Scholar] [CrossRef]
- Sun, J.; Yan, C.; Wen, J. Intelligent Bearing Fault Diagnosis Method Combining Compressed Data Acquisition and Deep Learning. IEEE Trans. Instrument. Measur. 2018, 67, 185–195. [Google Scholar] [CrossRef]
- Shao, H.; Jiang, H.; Zhang, H.; Duan, W.; Liang, T.; Wu, S. Rolling bearing fault feature learning using improved convolutional deep belief network with compressed sensing. Mech. Syst. Signal Process. 2018, 100, 743–765. [Google Scholar] [CrossRef]
- Song, S.; Zhang, X.; Hao, Q.; Wang, Y.; Feng, N.; Shen, Y. An improved reconstruction method based on auto-adjustable step size sparsity adaptive matching pursuit and adaptive modular dictionary update for acoustic emission signals of rails. Measurement 2022, 189, 110650. [Google Scholar] [CrossRef]
- Hu, Z.X.; Wang, Y.; Ge, M.F.; Liu, J. Data-Driven Fault Diagnosis Method Based on Compressed Sensing and Improved Multiscale Network. IEEE Trans. Ind. Electr. 2020, 67, 3216–3225. [Google Scholar] [CrossRef]
- Candes, E.J.; Tao, T. Near-Optimal Signal Recovery From Random Projections: Universal Encoding Strategies? IEEE Trans. Inf. Theory 2006, 52, 5406–5425. [Google Scholar] [CrossRef] [Green Version]
- Eldar, Y.; Kutyniok, G. Compressed Sensing: Theory and Applications; Cambridge University Press: Cambridge, UK, 2012. [Google Scholar]
- Wang, C.; Liu, C.; Liao, M.; Yang, Q. An enhanced diagnosis method for weak fault features of bearing acoustic emission signal based on compressed sensing. Math. Biosci. Eng. 2021, 18, 1670–1688. [Google Scholar] [CrossRef] [PubMed]
- Guo, F.-Y.; Zhang, Y.-C.; Wang, Y.; Wang, P.; Ren, P.-J.; Guo, R.; Wang, X.-Y. Fault Detection of Reciprocating Compressor Valve Based on One-Dimensional Convolutional Neural Network. Math. Probl. Eng. 2020, 2020, 8058723. [Google Scholar] [CrossRef]
- Hoang, D.T.; Tran, X.T.; Van, M.; Kang, H.J. A Deep Neural Network-Based Feature Fusion for Bearing Fault Diagnosis. Sensors 2021, 21, 244. [Google Scholar] [CrossRef] [PubMed]
- Jian, X.; Li, W.; Guo, X.; Wang, R. Fault Diagnosis of Motor Bearings Based on a One-Dimensional Fusion Neural Network. Sensors 2019, 19, 122. [Google Scholar] [CrossRef] [PubMed] [Green Version]
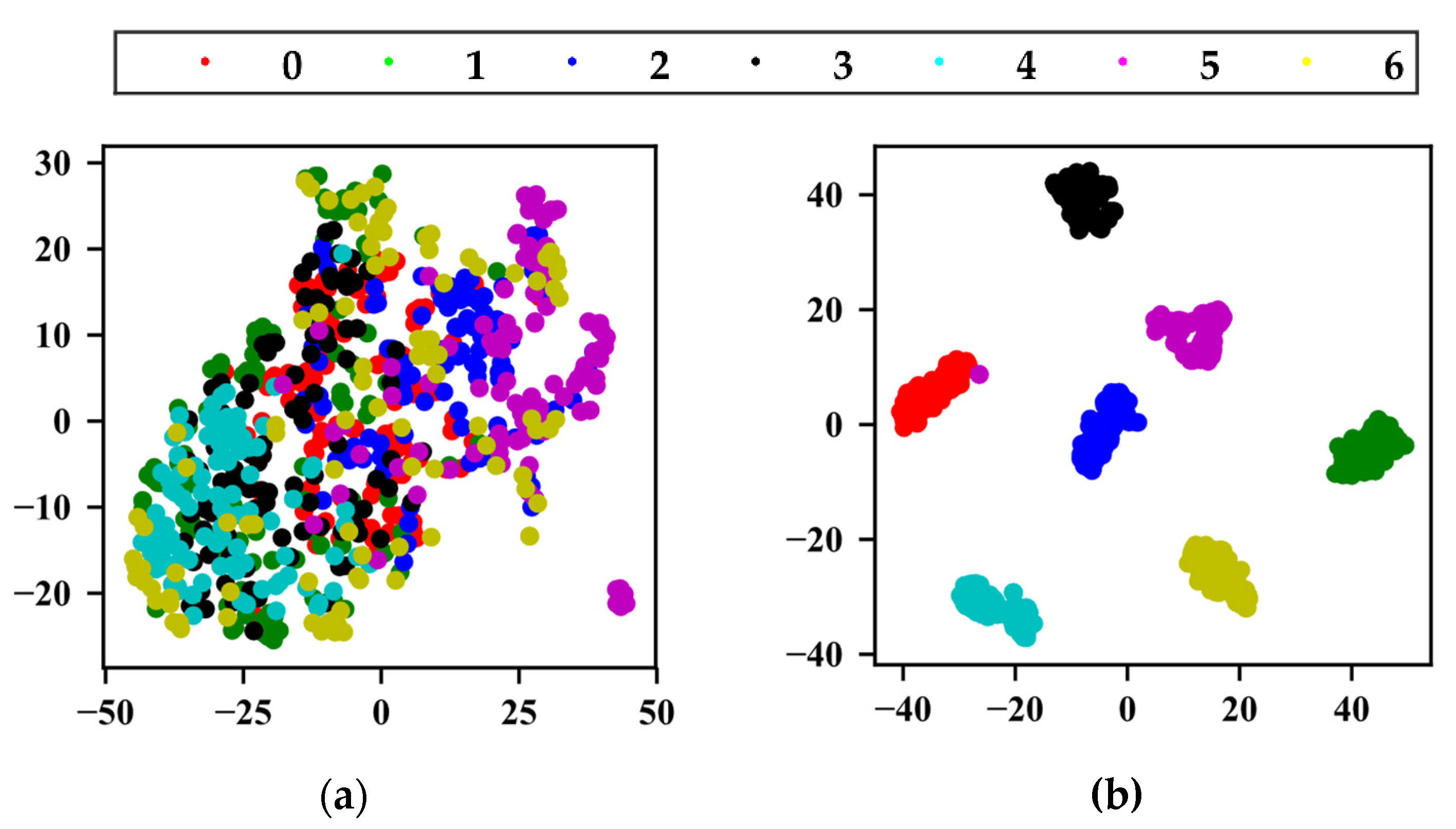
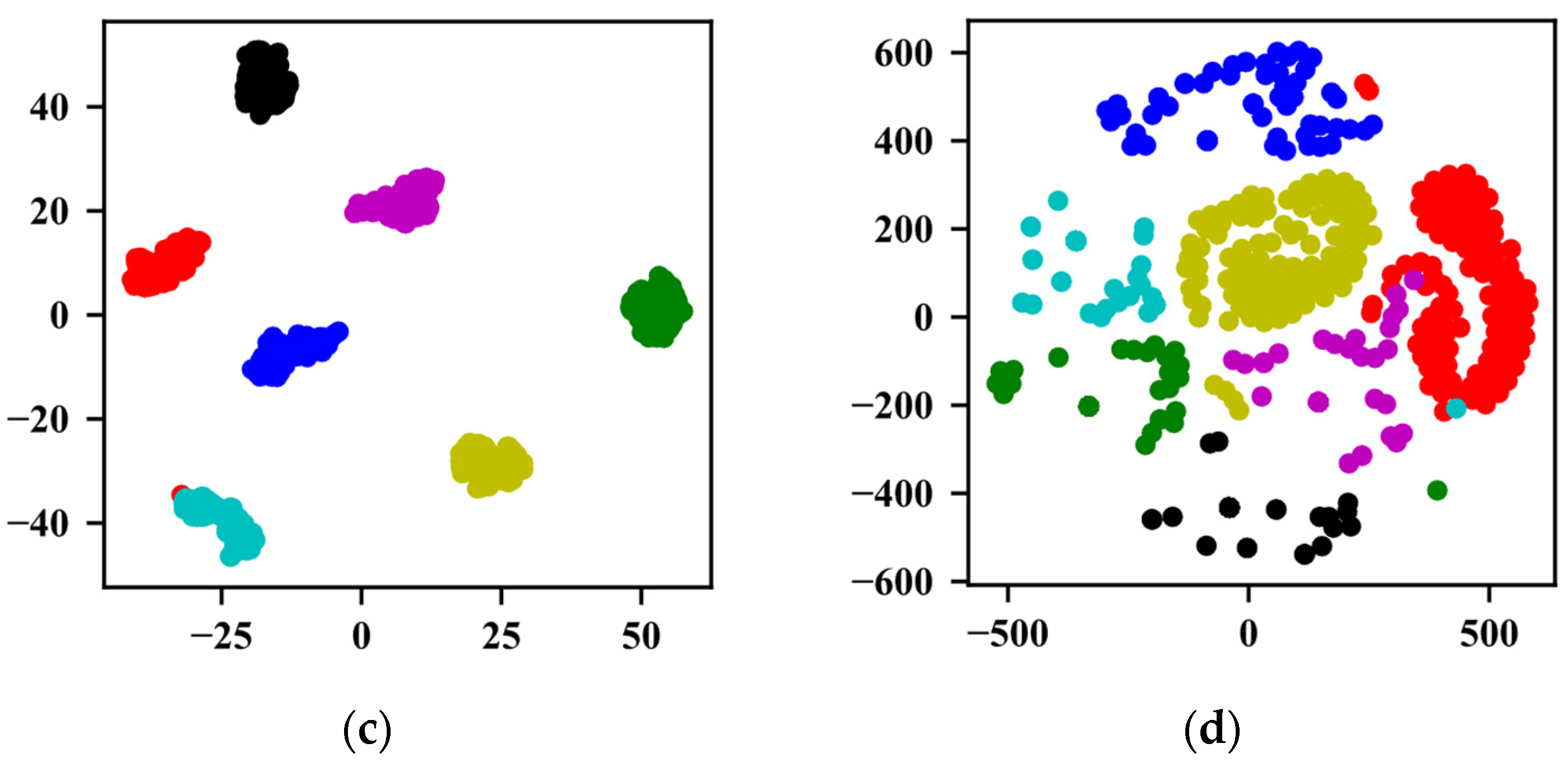
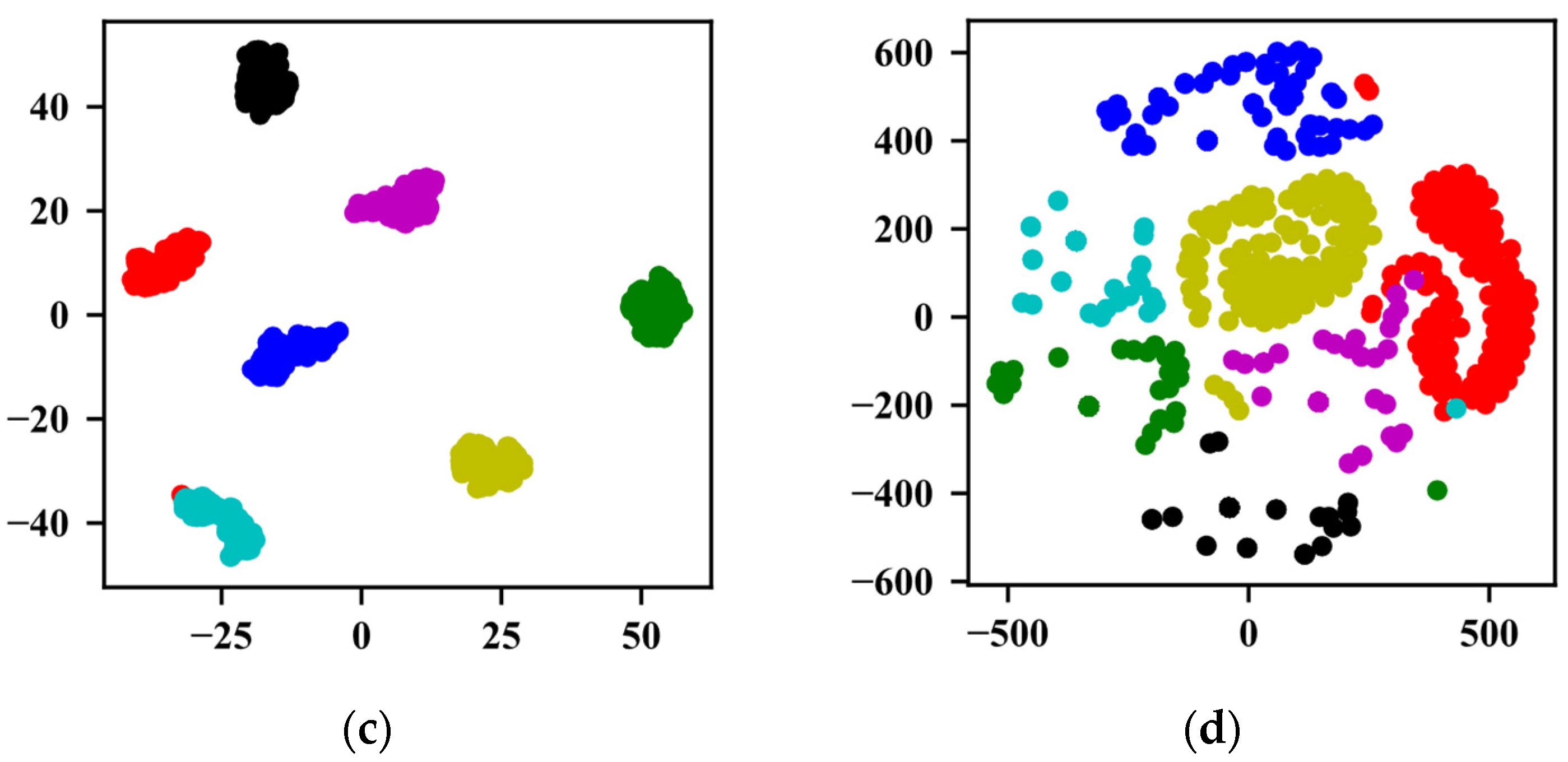
- Laurens, V.D.M.; Hinton, G. Visualizing Data using t-SNE. Mach. Learn. Res. 2008, 9, 2579–2605. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Layer | Conv Kernel Size (Length × Width @ Channels) | Activation Function | Output Size (Length × Width @ Channels) |
|---|---|---|---|
| Fusion conv 1 | 64 × 1@4 | ReLU | 1638 × 1@1 |
| Conv2 | 32 × 1@64 | ReLU | 1638 × 1@64 |
| Energy-pooling 1 | 2 × 1@64 | 819 × 1@64 | |
| Conv 3 | 32 × 1@64 | ReLU | 819 × 1@64 |
| Dropout | |||
| Conv 4 | 32 × 1@128 | ReLU | 512 × 1@128 |
| Max-pooling 2 | 3 × 1@128 | 273 × 1@128 | |
| FC1 | 216 × 1 | 216 × 1@1 | |
| FC2 | 64 × 1 | 64 × 1@1 | |
| Softmax | 7 × 1 | 7 × 1@1 |
| Sample Type | Points | Training Set | Test Set | Mark |
|---|---|---|---|---|
| Normal | 500 × 1638 × 4 | 400 | 100 | 0 |
| Sun gear tooth root crack | 500 × 1638 × 4 | 400 | 100 | 1 |
| Sun gear multi-tooth surface wear | 500 × 1638 × 4 | 400 | 100 | 2 |
| Sun gear single tooth surface wear | 500 × 1638 × 4 | 400 | 100 | 3 |
| Planetary gear tooth root crack | 500 × 1638 × 4 | 400 | 100 | 4 |
| Planetary gear multi-tooth surface wear | 500 × 1638 × 4 | 400 | 100 | 5 |
| Planetary gear single tooth surface wear | 500 × 1638 × 4 | 400 | 100 | 6 |
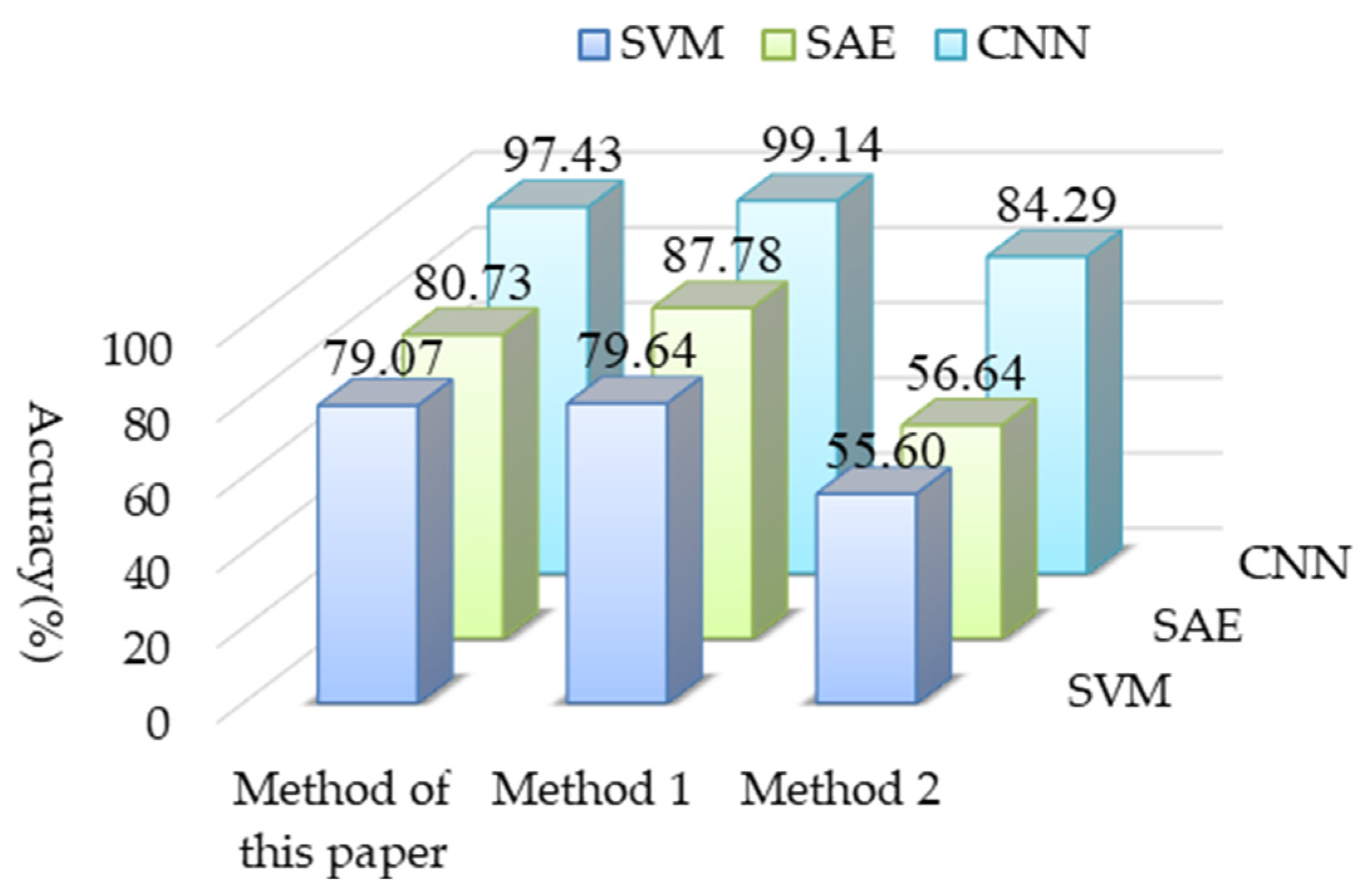
| Method | Accuracy (%) | Training Time (s) |
|---|---|---|
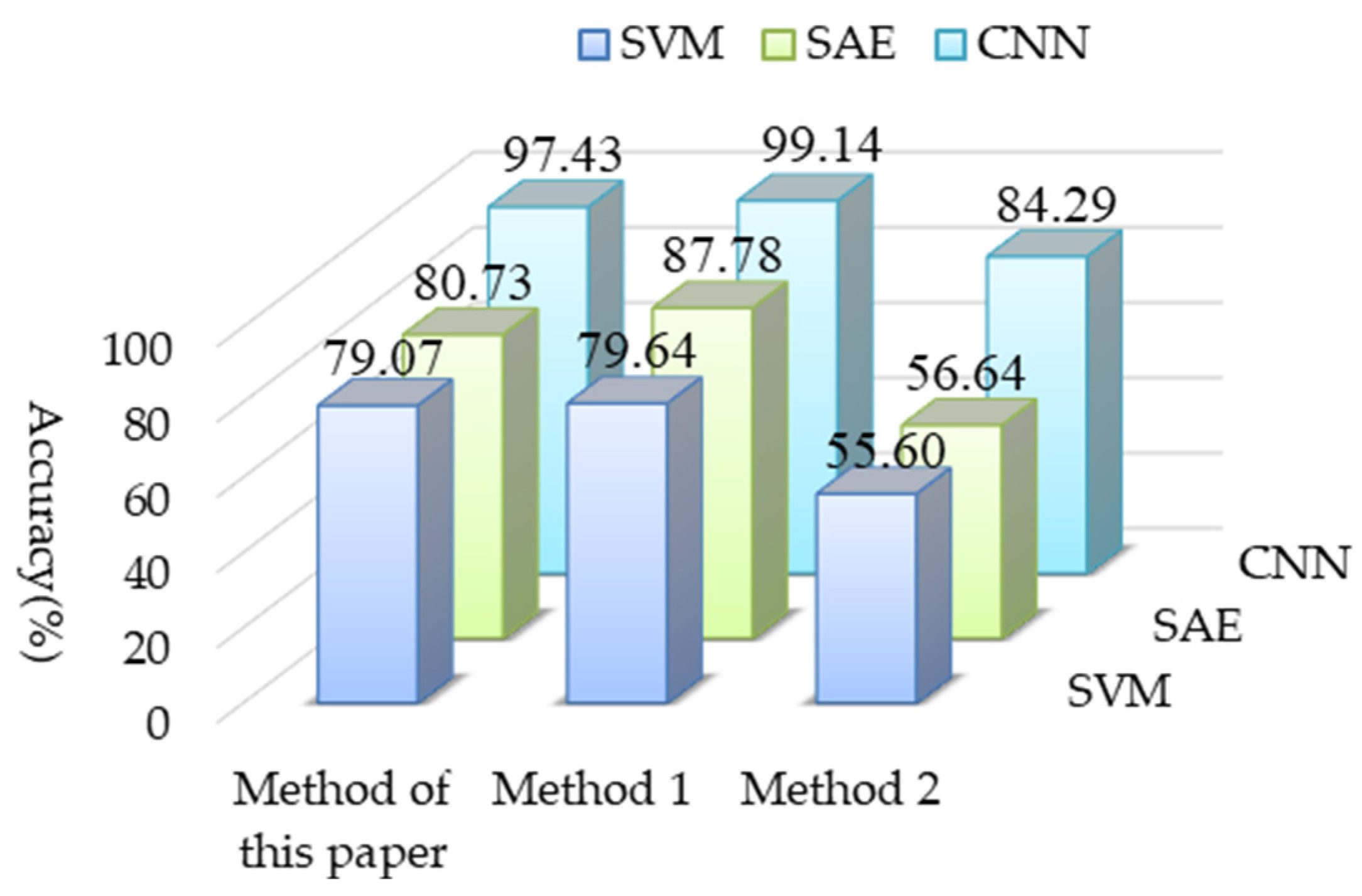
| Method of this study | 97.43 | 3500 |
| Method 1 | 99.14 | 15,000 |
| Method 2 | 84.29 | 2000 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, J.; Liu, C.; Xu, Q.; Tai, J. Acoustic Emission Signal Fault Diagnosis Based on Compressed Sensing for RV Reducer. Sensors 2022, 22, 2641. https://doi.org/10.3390/s22072641
Yang J, Liu C, Xu Q, Tai J. Acoustic Emission Signal Fault Diagnosis Based on Compressed Sensing for RV Reducer. Sensors. 2022; 22(7):2641. https://doi.org/10.3390/s22072641
Chicago/Turabian StyleYang, Jianwei, Chang Liu, Qitong Xu, and Jinyi Tai. 2022. "Acoustic Emission Signal Fault Diagnosis Based on Compressed Sensing for RV Reducer" Sensors 22, no. 7: 2641. https://doi.org/10.3390/s22072641
APA StyleYang, J., Liu, C., Xu, Q., & Tai, J. (2022). Acoustic Emission Signal Fault Diagnosis Based on Compressed Sensing for RV Reducer. Sensors, 22(7), 2641. https://doi.org/10.3390/s22072641