
Distributed Target Detection in Unknown Interference



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Problem Formulation
3. Detector Derivations
3.1. GLRT
3.2. Rao Test
3.3. Wald Test
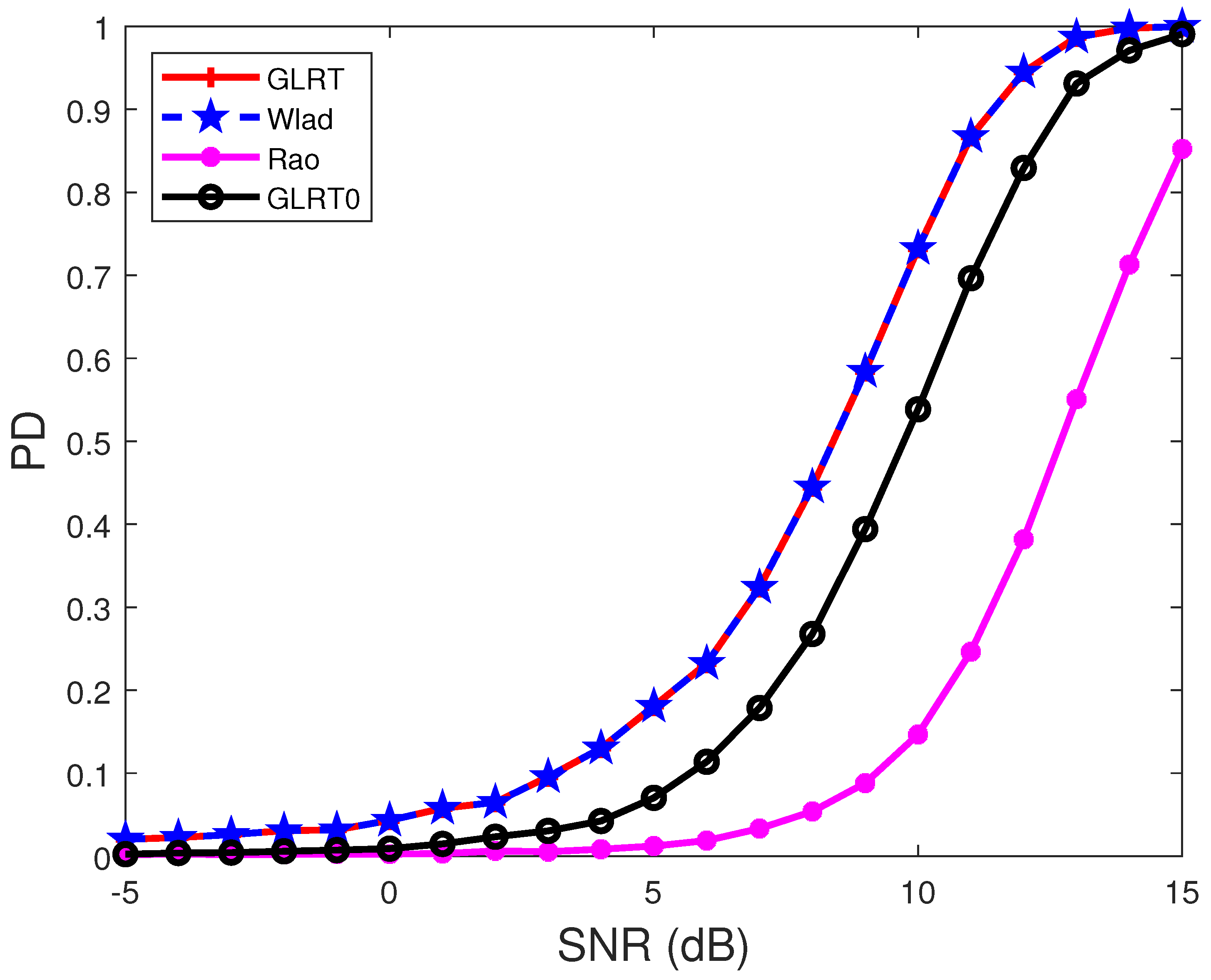
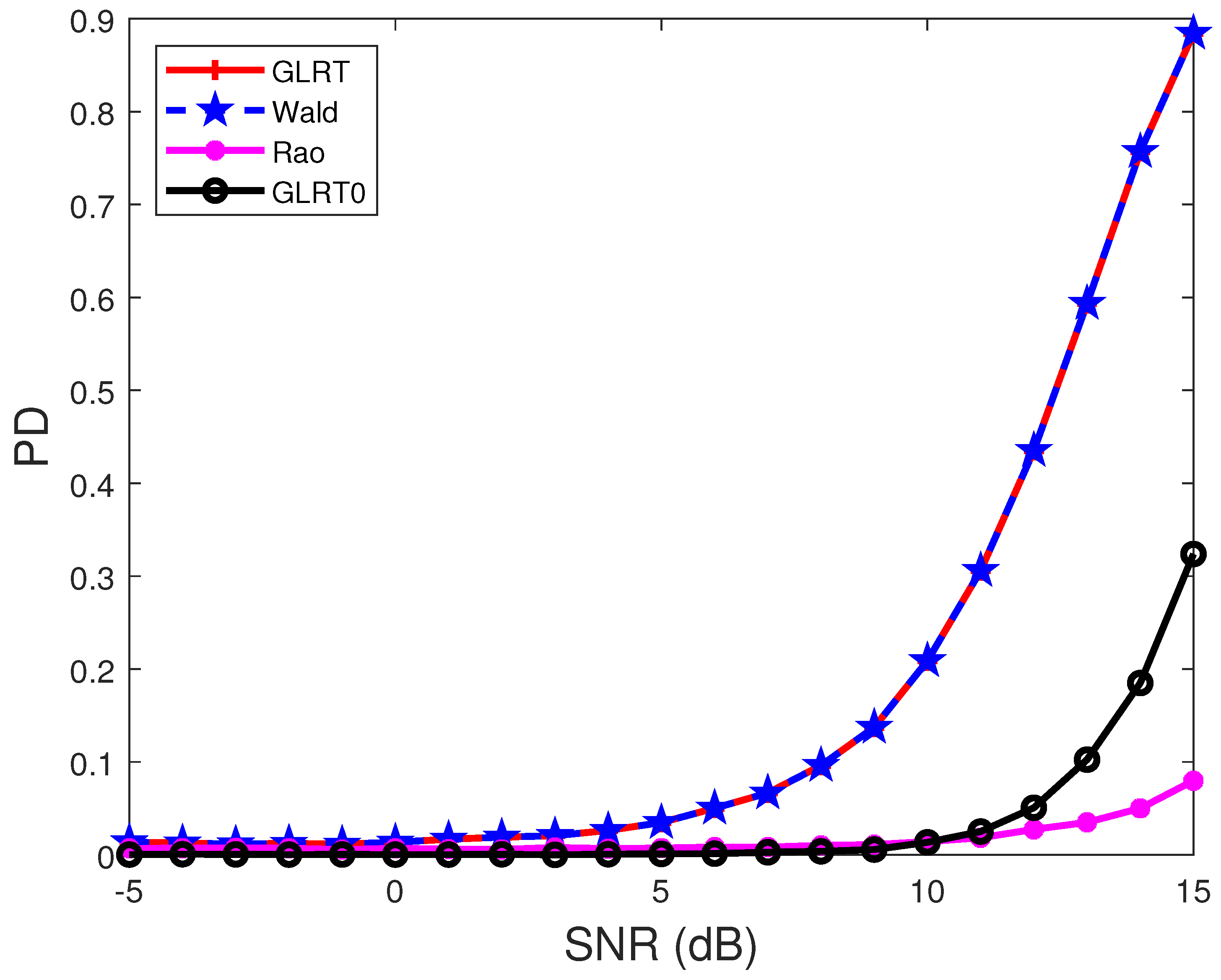
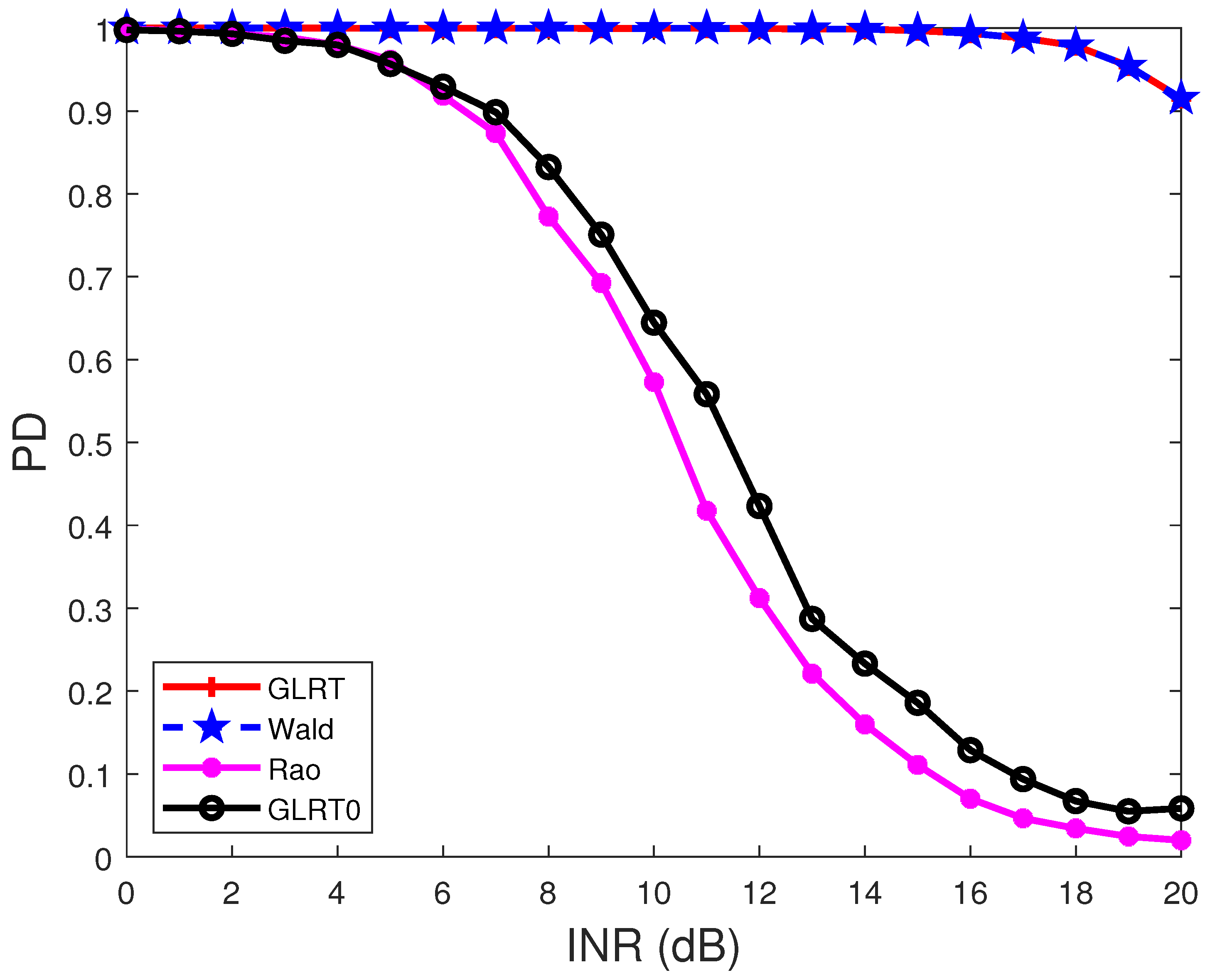
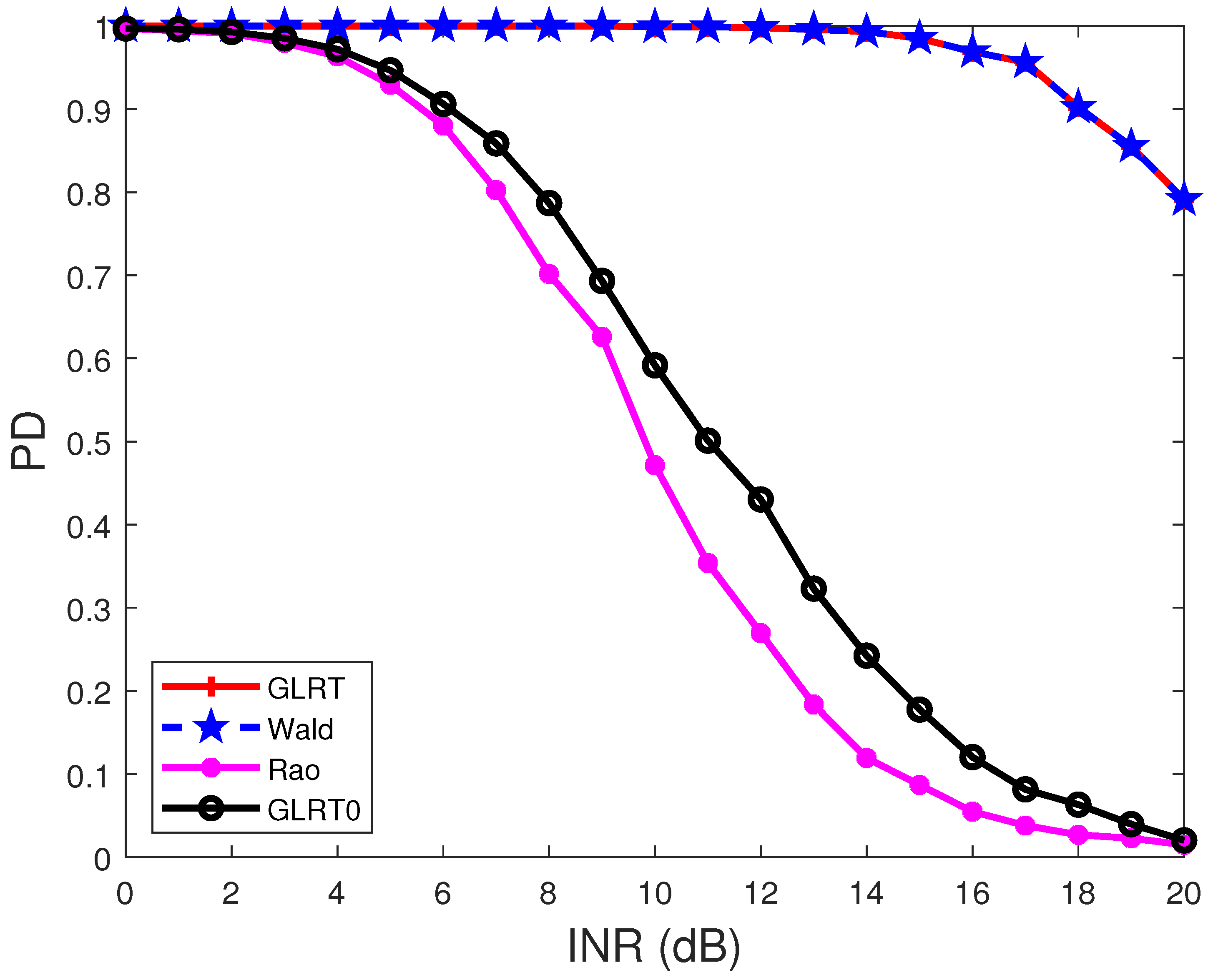
4. Performance Comparison
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A. The Proof of the Equivalence between the GLRT and the Wald Test When p = 1
References
- Wei, Y.; Lu, Z.; Yuan, G.; Fang, Z.; Huang, Y. Sparsity Adaptive Matching Pursuit Detection Algorithm Based on Compressed Sensing for Radar Signals. Sensors 2017, 17, 1120. [Google Scholar] [CrossRef]
- Kang, N.; Shang, Z.; Du, Q. Knowledge-Aided Structured Covariance Matrix Estimator Applied for Radar Sensor Signal Detection. Sensors 2019, 19, 664. [Google Scholar] [CrossRef] [Green Version]
- Liu, B.; Chen, B.; Yang, M. Constant-Modulus-Waveform Design for Multiple-Target Detection in Colocated MIMO Radar. Sensors 2019, 19, 4040. [Google Scholar] [CrossRef] [Green Version]
- Asif, A.; Kandeepan, S. Cooperative Fusion Based Passive Multistatic Radar Detection. Sensors 2021, 21, 3209. [Google Scholar] [CrossRef]
- Blasone, G.P.; Colone, F.; Lombardo, P.; Wojaczek, P.; Cristallini, D. Dual Cancelled Channel STAP for Target Detection and DOA Estimation in Passive Radar. Sensors 2021, 21, 4569. [Google Scholar] [CrossRef]
- Hua, X.; Ono, Y.; Peng, L.; Cheng, Y.; Wan, H. Target Detection within Nonhomogeneous Clutter Via Total Bregman Divergence-Based Matrix Information Geometry Detectors. IEEE Trans. Signal Process. 2021, 69, 4326–4340. [Google Scholar] [CrossRef]
- Hua, X.; Peng, L. MIG Median Detectors with Manifold Filter. Signal Process. 2021, 188, 108176. [Google Scholar] [CrossRef]
- Liu, W.; Liu, J.; Hao, C.; Gao, Y.; Wang, Y.L. Multichannel adaptive signal detection: Basic theory and literature review. Sci. China Inf. Sci. 2022, 65, 121301. [Google Scholar] [CrossRef]
- Kelly, E.J. An Adaptive Detection Algorithm. IEEE Trans. Aerosp. Electron. Syst. 1986, 22, 115–127. [Google Scholar] [CrossRef] [Green Version]
- Robey, F.C.; Fuhrmann, D.R.; Kelly, E.J.; Nitzberg, R. A CFAR Adaptive Matched Filter Detector. IEEE Trans. Aerosp. Electron. Syst. 1992, 28, 208–216. [Google Scholar] [CrossRef] [Green Version]
- Kraut, S.; Scharf, L.L. The CFAR adaptive subspace detector is a scale-invariant GLRT. IEEE Trans. Signal Process. 1999, 47, 2538–2541. [Google Scholar] [CrossRef] [Green Version]
- Orlando, D. A Novel Noise Jamming Detection Algorithm for Radar Applications. IEEE Signal Process. Lett. 2017, 24, 206–210. [Google Scholar] [CrossRef]
- Bandiera, F.; De Maio, A.; Greco, A.S.; Ricci, G. Adaptive radar detection of distributed targets in homogeneous and partially homogeneous noise plus subspace interference. IEEE Trans. Signal Process. 2007, 55, 1223–1237. [Google Scholar] [CrossRef]
- Liu, W.; Liu, J.; Huang, L.; Zou, D.; Wang, Y. Rao Tests for Distributed Target Detection in Interference and Noise. Signal Process. 2015, 117, 333–342. [Google Scholar] [CrossRef]
- Liu, W.; Liu, J.; Li, H.; Du, Q.; Wang, Y. Multichannel Signal Detection Based on Wald Test in Subspace Interference and Gaussian Noise. IEEE Trans. Aerosp. Electron. Syst. 2019, 55, 1370–1381. [Google Scholar] [CrossRef]
- Sun, M.; Liu, W.; Liu, J.; Hao, C. Rao and Wald Tests for Target Detection in Coherent Interference. IEEE Trans. Aerosp. Electron. Syst. 2021. [Google Scholar] [CrossRef]
- Liu, W.; Wang, Y.L.; Liu, J.; Xie, W.; Li, R.; Chen, H. Design and Performance Analysis of Adaptive Subspace Detectors in Orthogonal Interference and Gaussian Noise. IEEE Trans. Aerosp. Electron. Syst. 2016, 52, 2068–2079. [Google Scholar] [CrossRef]
- Sun, M.; Liu, W.; Liu, J.; Tang, P.; Hao, C. Adaptive subspace detection based on gradient test for orthogonal interference. IEEE Trans. Aerosp. Electron. Syst. 2021. [Google Scholar] [CrossRef]
- Liu, W.; Liu, J.; Wang, L.; Duan, K.; Chen, Z.; Wang, Y. Adaptive Array Detection in Noise and Completely Unknown Jamming. Digit. Signal Process. 2015, 46, 41–48. [Google Scholar] [CrossRef]
- Liu, W.; Liu, J.; Hu, X.; Tang, Z.; Huang, L.; Wang, Y.L. Statistical Performance Analysis of the Adaptive Orthogonal Rejection Detector. IEEE Signal Process. Lett. 2016, 23, 873–877. [Google Scholar] [CrossRef]
- Song, C.; Wang, B.; Xiang, M.; Li, W. Extended GLRT Detection of Moving Targets for Multichannel SAR Based on Generalized Steering Vector. Sensors 2021, 21, 1478. [Google Scholar] [CrossRef]
- Xie, D.; Wang, F.; Chen, J. Extended Target Echo Detection Based on KLD and Wigner Matrices. Sensors 2019, 19, 5385. [Google Scholar] [CrossRef] [Green Version]
- Liu, W.; Wang, Y.; Xie, W. Fisher Information Matrix, Rao Test, and Wald Test for Complex-Valued Signals and Their Applications. Signal Process. 2014, 94, 1–5. [Google Scholar] [CrossRef]
- Kelly, E.J.; Forsythe, K.M. Adaptive Detection and Parameter Estimation for Multidimensional Signal Models; Technical Report; Lincoln Laboratory: Lexington, MA, USA, 1989. [Google Scholar]
- Liu, W.; Xie, W.; Liu, J.; Wang, Y. Adaptive Double Subspace Signal Detection in Gaussian Background–Part I: Homogeneous Environments. IEEE Trans. Signal Process. 2014, 62, 2345–2357. [Google Scholar] [CrossRef]

Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, K.; Deng, Y.; Yu, Z. Distributed Target Detection in Unknown Interference. Sensors 2022, 22, 2430. https://doi.org/10.3390/s22072430
Xu K, Deng Y, Yu Z. Distributed Target Detection in Unknown Interference. Sensors. 2022; 22(7):2430. https://doi.org/10.3390/s22072430
Chicago/Turabian StyleXu, Kaiming, Yunkai Deng, and Zhongjun Yu. 2022. "Distributed Target Detection in Unknown Interference" Sensors 22, no. 7: 2430. https://doi.org/10.3390/s22072430
APA StyleXu, K., Deng, Y., & Yu, Z. (2022). Distributed Target Detection in Unknown Interference. Sensors, 22(7), 2430. https://doi.org/10.3390/s22072430