
Heuristic Greedy Scheduling of Electric Vehicles in Vehicle-to-Grid Microgrid Owned Aggregators



Abstract
:1. Introduction
1.1. Motivation
1.2. Related Work
1.3. Contributions of the Paper
- (1)
- Developing greedy-based stochastic optimization approach for cost minimization.
- (2)
- Stochastic real-time experimentation energy scheduling of electric vehicles at the parking lot aggregators.
- (3)
- Developing a comprehensive simulator, which generates different scenarios of the EV’s states representing diverse uncertainty states of operation conditions. As the EV’s states might be off-grid, i.e., passive parking, or on-grid, i.e., to charge or discharge while parking, the data simulator thus allows the greedy scheduler to find an economic solution for the microgrid operation and also consider the driver’s satisfaction. The data simulator was developed in a hardware-in-the-loop manner to assess the performance of the proposed greedy scheduler, which takes into account the following policies to conform with the simulator: operation, time discretization, energy generation and consumption, EV’s charging/discharging, financial regulations, and the evaluation stage.
- (4)
- Economic and reliability analysis of integrating electric vehicles as well as the renewables into microgrids.The developed greedy approach achieves the following advantages:
- –
- Simple, yet effective.
- –
- Model-free since it does not need to build a complicated stochastic model for the V2G system,
- –
- It is independent of the stochastic nature of the system parameters. So, we do not have to worry about the interactions between the stochastic parameters.
- –
- Efficient in terms of computation cost.
- –
- There is no complex objective function to be optimized via the system’s input parameters.
- –
- There is no need for tedious training processes.
1.4. Paper Organization
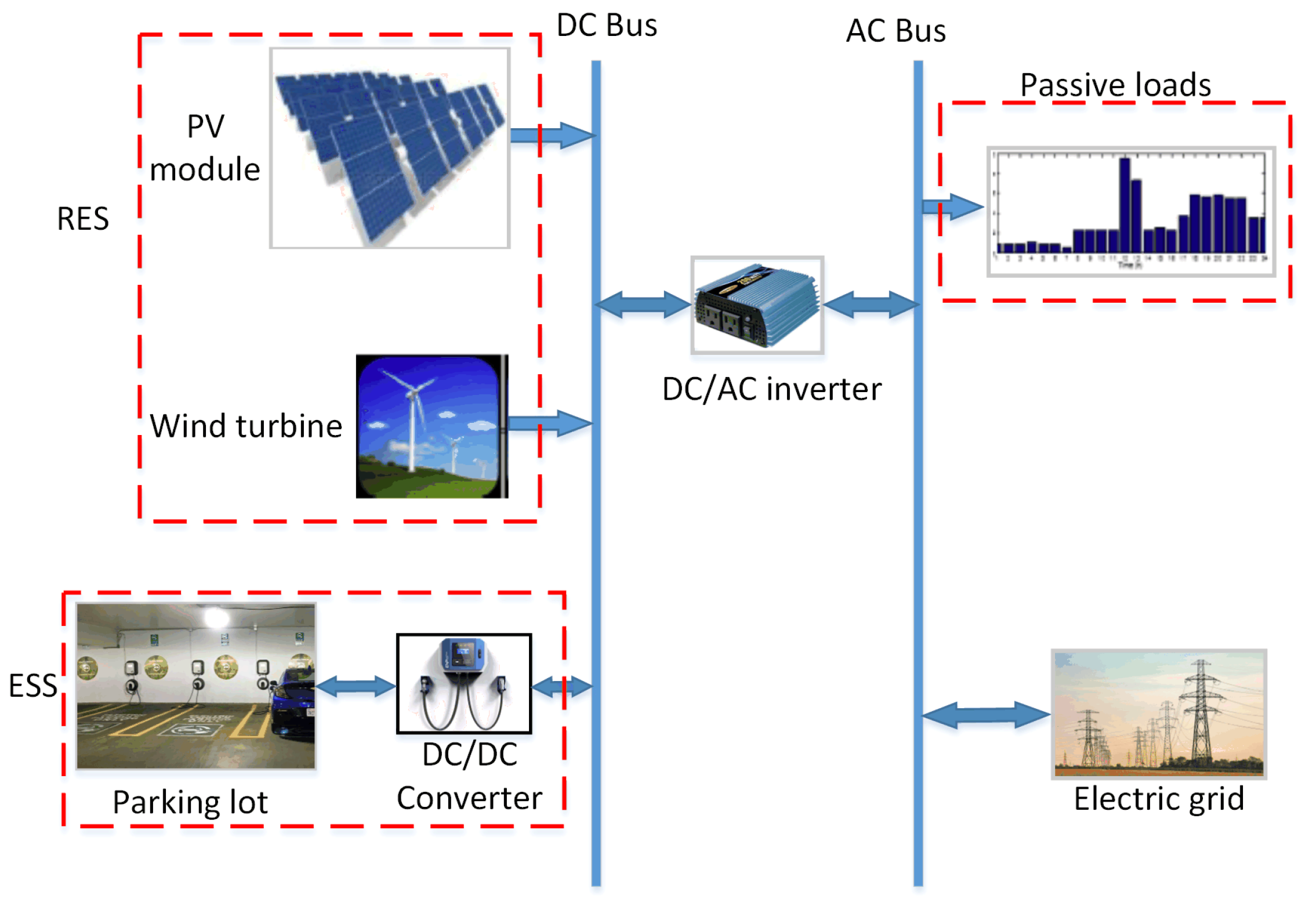
2. System Description
2.1. Passive Loads
2.2. Renewable Energy Source (RES)
2.3. Energy Storage System (ESS)
- The traffic, i.e., entrance and exit rates, of EVs. This is related to the nature of the neighborhood of the facility. For instance, is it in a city center or a suburban? What is the nature of the neighboring business, e.g., banks, markets, playgrounds… etc.?
- The parking duration of the vehicles.
- The capacity ratings of the parking EVs.
2.4. Public Electric Grid
2.5. Power Converter Model
3. Greedy Scheduler
| Algorithm 1: The greedy scheduler algorithm. |
|
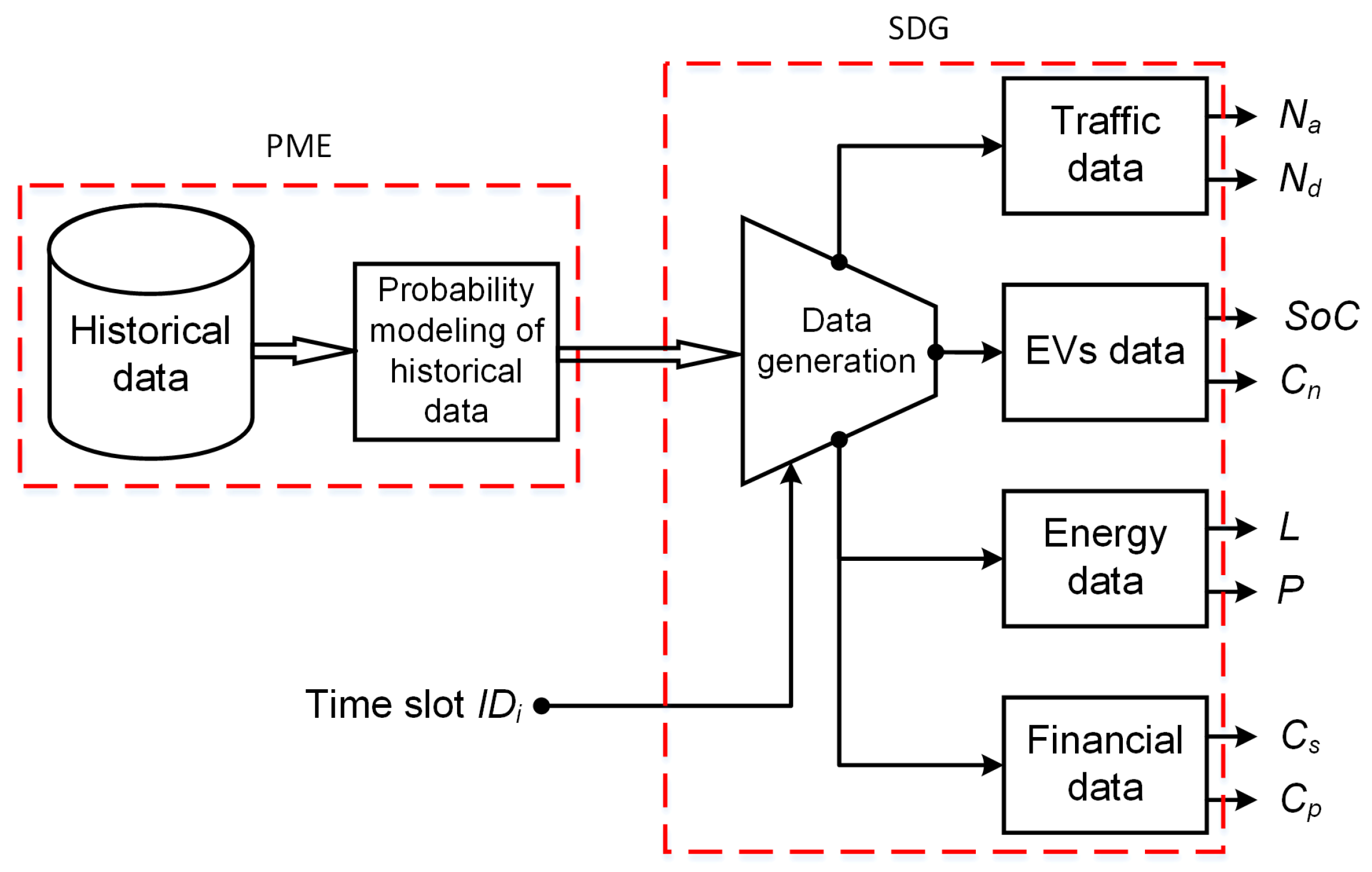
4. System Simulator
4.1. Probabilistic Model Estimator (PME)
4.1.1. Traffic Data Model
- -
- Parking EVs:
- -
- EVs’ rated capacities:
4.1.2. Energy Data Model
4.1.3. Financial Data Model
4.2. Simulation Data Generator (SDG)
4.2.1. Traffic Module
4.2.2. EV Module
4.2.3. Energy Module
4.2.4. Financial Data Model
5. Experimental Design
5.1. Operation Policy
5.1.1. Time Discretization
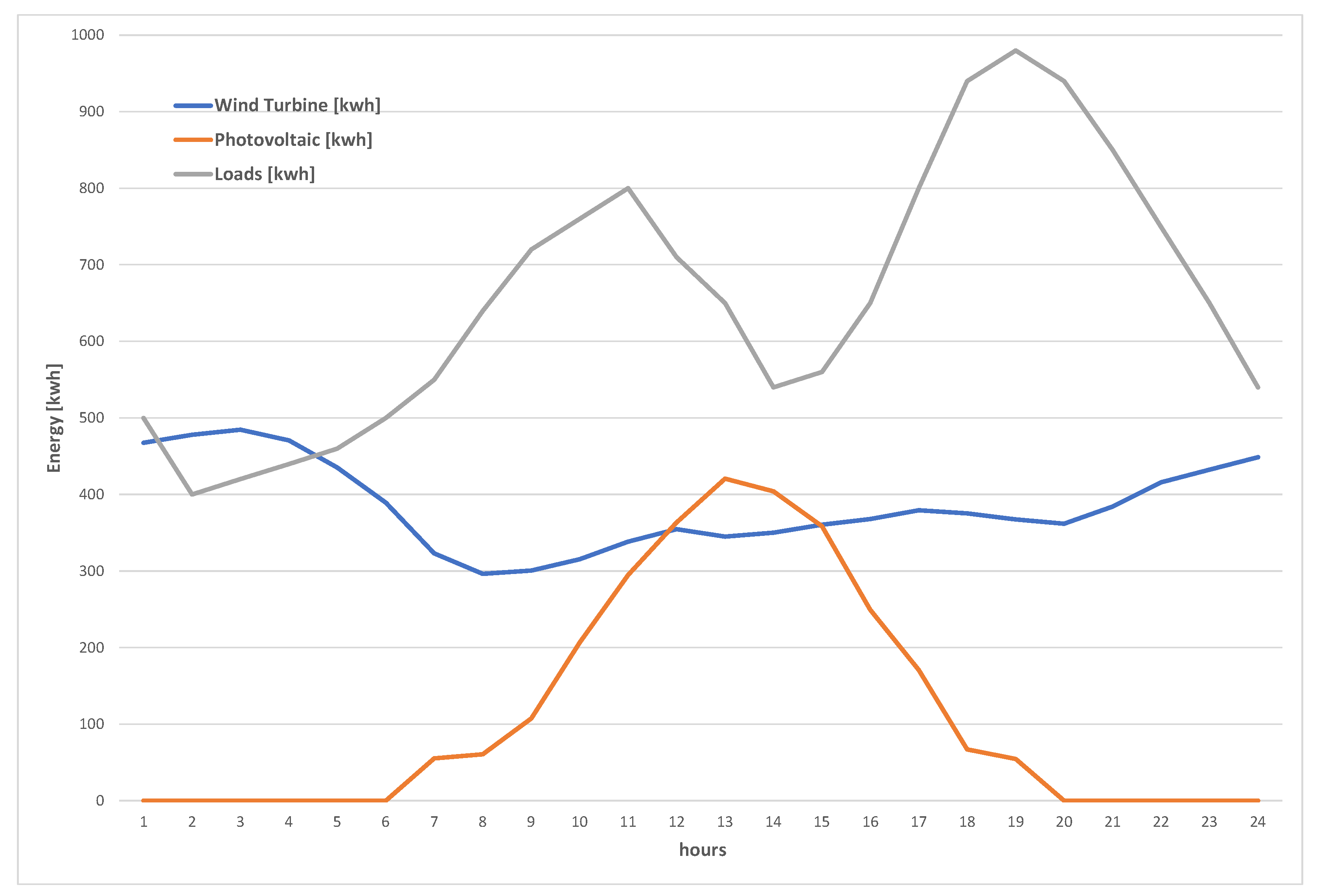
5.1.2. Energy Generation and Consumption
5.1.3. EVs Charging/Discharging
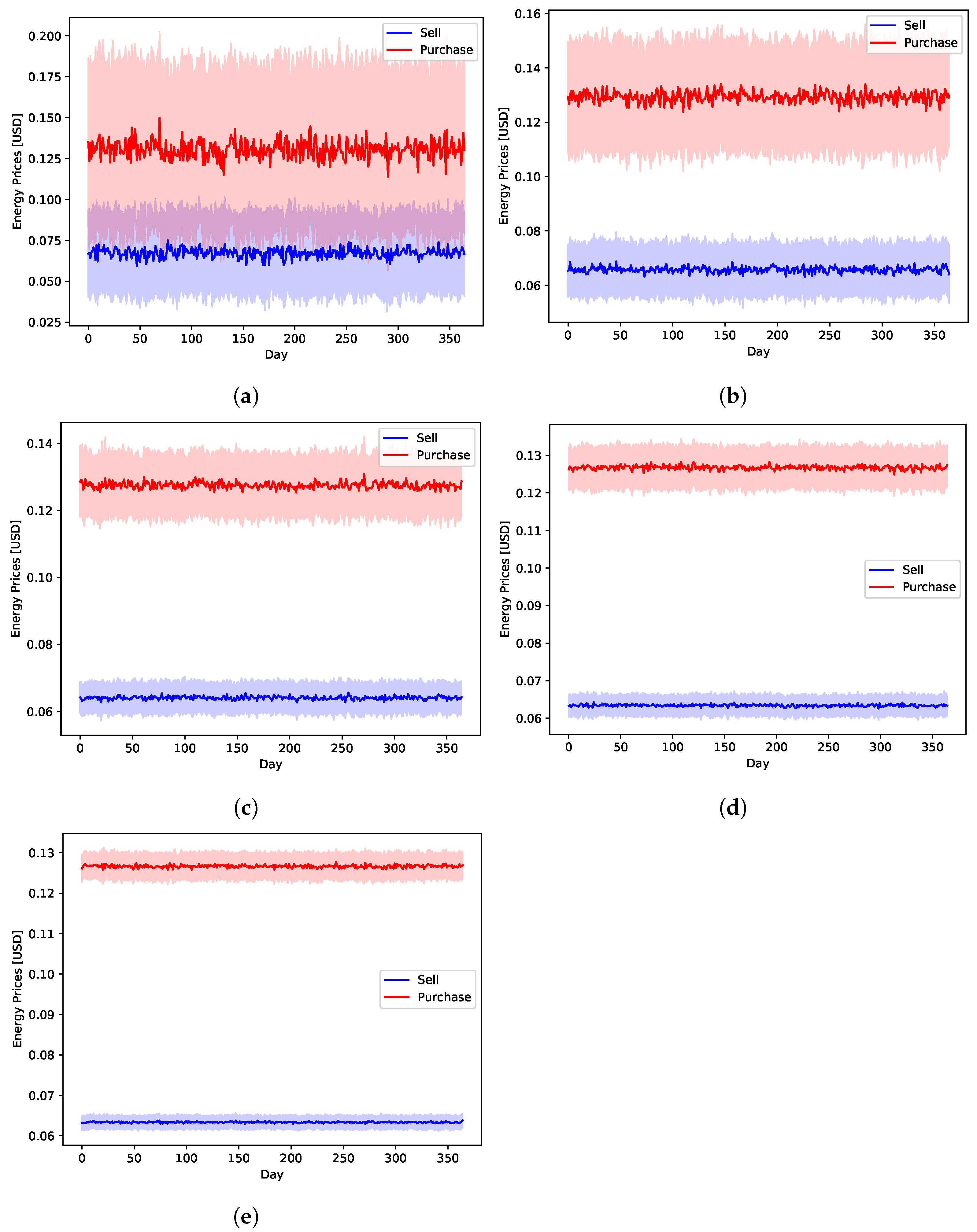
5.1.4. Financial Regulations
5.2. Evaluation Data
6. Experimental Results
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Acknowledgments
Conflicts of Interest
References
- Fernandez, G.S.; Krishnasamy, V.; Kuppusamy, S.; Ali, J.S.; Ali, Z.M.; El-Shahat, A.; Abdel Aleem, S.H. Optimal Dynamic Scheduling of Electric Vehicles in a Parking Lot Using Particle Swarm Optimization and Shuffled Frog Leaping Algorithm. Energies 2020, 13, 6384. [Google Scholar] [CrossRef]
- Fotopoulou, M.; Rakopoulos, D.; Blanas, O. Day Ahead Optimal Dispatch Schedule in a Smart Grid Containing Distributed Energy Resources and Electric Vehicles. Sensors 2021, 21, 7295. [Google Scholar] [CrossRef] [PubMed]
- CU. Available online: https://www.copper.org/environment/sustainable-energy/electric-vehicles/ (accessed on 22 February 2022).
- Khazraj, H.; Khanghah, B.Y.; Ghimire, P.; Martin, F.; Ghomi, M.; da Silva, F.F.; Bak, C.L. Optimal operational scheduling and reconfiguration coordination in smart grids for extreme weather condition. IET Gener. Transm. Distrib. 2019, 13, 3455–3463. [Google Scholar] [CrossRef]
- Abo-Elyousr, F.K.; Aref, M.; Elnozahy, A. Practicality of Wave Energy Conversion Systems at the Northern Egyptian Sea Water. In Proceedings of the 2021 22nd International Middle East Power Systems Conference (MEPCON), Assiut, Egypt, 14–16 December 2021; pp. 528–533. [Google Scholar]
- Nasir, T.; Raza, S.; Abrar, M.; Muqeet, H.A.; Jamil, H.; Qayyum, F.; Cheikhrouhou, O.; Alassery, F.; Hamam, H. Optimal Scheduling of Campus Microgrid Considering the Electric Vehicle Integration in Smart Grid. Sensors 2021, 21, 7133. [Google Scholar] [CrossRef] [PubMed]
- Quynh, N.V.; Ali, Z.M.; Alhaider, M.M.; Rezvani, A.; Suzuki, K. Optimal energy management strategy for a renewable-based microgrid considering sizing of battery energy storage with control policies. Int. J. Energy Res. 2021, 45, 5766–5780. [Google Scholar] [CrossRef]
- Elavarasan, R.M.; Shafiullah, G.; Raju, K.; Mudgal, V.; Arif, M.T.; Jamal, T.; Subramanian, S.; Balaguru, V.S.; Reddy, K.; Subramaniam, U. COVID-19: Impact analysis and recommendations for power sector operation. Appl. Energy 2020, 279, 115739. [Google Scholar] [CrossRef]
- Abo-Elyousr, F.K.; Guerrero, J.M.; Ramadan, H.S. Prospective hydrogen-based microgrid systems for optimal leverage via metaheuristic approaches. Appl. Energy 2021, 300, 117384. [Google Scholar] [CrossRef]
- Rojas-Dueñas, G.; Riba, J.R.; Moreno-Eguilaz, M. CNN-LSTM-Based Prognostics of Bidirectional Converters for Electric Vehicles’ Machine. Sensors 2021, 21, 7079. [Google Scholar] [CrossRef]
- Jawad, M.; Qureshi, M.B.; Ali, S.M.; Shabbir, N.; Khan, M.U.S.; Aloraini, A.; Nawaz, R. A Cost-Effective Electric Vehicle Intelligent Charge Scheduling Method for Commercial Smart Parking Lots Using a Simplified Convex Relaxation Technique. Sensors 2020, 20, 4842. [Google Scholar] [CrossRef]
- Mortaz, E.; Valenzuela, J. Microgrid energy scheduling using storage from electric vehicles. Electr. Power Syst. Res. 2017, 143, 554–562. [Google Scholar] [CrossRef]
- Aldosary, A.; Rawa, M.; Ali, Z.M.; Razmjoo, A.; Rezvani, A. Energy management strategy based on short-term resource scheduling of a renewable energy-based microgrid in the presence of electric vehicles using θ-modified krill herd algorithm. Neural Comput. Appl. 2021, 33, 10005–10020. [Google Scholar] [CrossRef]
- Thomas, D.; Deblecker, O.; Ioakimidis, C.S. Optimal operation of an energy management system for a grid-connected smart building considering photovoltaics’ uncertainty and stochastic electric vehicles’ driving schedule. Appl. Energy 2018, 210, 1188–1206. [Google Scholar] [CrossRef]
- Koltsaklis, N.E.; Giannakakis, M.; Georgiadis, M.C. Optimal energy planning and scheduling of microgrids. Chem. Eng. Res. Des. 2018, 131, 318–332. [Google Scholar] [CrossRef]
- Tao, H.; Ahmed, F.W.; Latifi, M.; Nakamura, H.; Li, Y. Hybrid Whale Optimization and Pattern search algorithm for Day-Ahead Operation of a Microgrid in the Presence of Electric Vehicles and Renewable Energies. J. Clean. Prod. 2021, 308, 127215. [Google Scholar] [CrossRef]
- Zhang, T.; Pota, H.; Chu, C.C.; Gadh, R. Real-time renewable energy incentive system for electric vehicles using prioritization and cryptocurrency. Appl. Energy 2018, 226, 582–594. [Google Scholar] [CrossRef]
- Qiu, D.; Ye, Y.; Papadaskalopoulos, D.; Strbac, G. A deep reinforcement learning method for pricing electric vehicles with discrete charging levels. IEEE Trans. Ind. Appl. 2020, 56, 5901–5912. [Google Scholar] [CrossRef]
- Van-Hai Bui, A.H.; Kim, H.M. A Strategy for Optimal Microgrid Operation Considering Vehicle-to-Grid Service. Int. J. Control Autom. 2017, 10, 405–418. [Google Scholar] [CrossRef]
- Liao, J.; Liu, T.; Tang, X.; Mu, X.; Huang, B.; Cao, D. Decision-making Strategy on Highway for Autonomous Vehicles using Deep Reinforcement Learning. IEEE Access 2020, 8, 177804–177814. [Google Scholar] [CrossRef]
- Pfeifer, A.; Dobravec, V.; Pavlinek, L.; Krajačić, G.; Duić, N. Integration of renewable energy and demand response technologies in interconnected energy systems. Energy 2018, 161, 447–455. [Google Scholar] [CrossRef]
- Carpinelli, G.; Mottola, F.; Proto, D.; Russo, A. Operation of Plug-In Electric Vehicles for Voltage Balancing in Unbalanced Microgrids. In Development and Integration of Microgrids; IntechOpen: London, UK, 2017; p. 233. [Google Scholar]
- Mortaz, E.; Valenzuela, J. Optimizing the size of a V2G parking deck in a microgrid. Int. J. Electr. Power Energy Syst. 2018, 97, 28–39. [Google Scholar] [CrossRef]
- Pfeifer, A.; Bošković, F.; Dobravec, V.; Matak, N.; Krajačić, G.; Duić, N.; Pukšec, T. Building smart energy systems on Croatian islands by increasing integration of renewable energy sources and electric vehicles. In Proceedings of the 2017 IEEE International Conference on Environment and Electrical Engineering and 2017 IEEE Industrial and Commercial Power Systems Europe (EEEIC/I&CPS Europe), Milan, Italy, 6–9 June 2017; pp. 1–6. [Google Scholar]
- Bracco, S.; Cancemi, C.; Causa, F.; Longo, M.; Siri, S. Optimization model for the design of a smart energy infrastructure with electric mobility. IFAC-PapersOnLine 2018, 51, 200–205. [Google Scholar] [CrossRef]
- Zdunek, R.; Grobelny, A.; Witkowski, J.; Gnot, R.I. On–Off Scheduling for Electric Vehicle Charging in Two-Links Charging Stations Using Binary Optimization Approaches. Sensors 2021, 21, 7149. [Google Scholar] [CrossRef] [PubMed]
- Fathy, A.; Abdelaziz, A.Y. Competition over resource optimization algorithm for optimal allocating and sizing parking lots in radial distribution network. J. Clean. Prod. 2020, 264, 121397. [Google Scholar] [CrossRef]
- Zakaria, A.; Ismail, F.B.; Lipu, M.H.; Hannan, M. Uncertainty models for stochastic optimization in renewable energy applications. Renew. Energy 2020, 145, 1543–1571. [Google Scholar] [CrossRef]
- Zhang, T.Z.; Chen, T.D. Smart charging management for shared autonomous electric vehicle fleets: A Puget Sound case study. Transp. Res. Part D Transp. Environ. 2020, 78, 102184. [Google Scholar] [CrossRef]
- Alipour, M.; Mohammadi-Ivatloo, B.; Moradi-Dalvand, M.; Zare, K. Stochastic scheduling of aggregators of plug-in electric vehicles for participation in energy and ancillary service markets. Energy 2017, 118, 1168–1179. [Google Scholar] [CrossRef]
- Dicorato, M.; Forte, G.; Trovato, M.; Muñoz, C.B.; Coppola, G. An Integrated DC Microgrid Solution for Electric Vehicle Fleet Management. IEEE Trans. Ind. Appl. 2019, 55, 7347–7355. [Google Scholar] [CrossRef]
- Sufyan, M.; Rahim, N.; Muhammad, M.; Tan, C.; Raihan, S.; Bakar, A. Charge coordination and battery lifecycle analysis of electric vehicles with V2G implementation. Electr. Power Syst. Res. 2020, 184, 106307. [Google Scholar] [CrossRef]
- Egbue, O.; Uko, C. Multi-agent approach to modeling and simulation of microgrid operation with vehicle-to-grid system. Electr. J. 2020, 33, 106714. [Google Scholar] [CrossRef]
- Salehpour, M.J.; Tafreshi, S.M. Contract-based utilization of plug-in electric vehicle batteries for day-ahead optimal operation of a smart micro-grid. J. Energy Storage 2020, 27, 101157. [Google Scholar] [CrossRef]
- Sarparandeh, M.H.; Ehsan, M. Pricing of Vehicle-to-Grid Services in a Microgrid by Nash Bargaining Theory. Math. Probl. Eng. 2017, 2017, 1840140. [Google Scholar] [CrossRef]
- Aliasghari, P.; Mohammadi-Ivatloo, B.; Alipour, M.; Abapour, M.; Zare, K. Optimal scheduling of plug-in electric vehicles and renewable micro-grid in energy and reserve markets considering demand response program. J. Clean. Prod. 2018, 186, 293–303. [Google Scholar] [CrossRef]
- Kim, S.; Lim, H. Reinforcement learning based energy management algorithm for smart energy buildings. Energies 2018, 11, 2010. [Google Scholar] [CrossRef] [Green Version]
- Liu, Z.; Wu, Q.; Ma, K.; Shahidehpour, M.; Xue, Y.; Huang, S. Two-stage optimal scheduling of electric vehicle charging based on transactive control. IEEE Trans. Smart Grid 2018, 10, 2948–2958. [Google Scholar] [CrossRef] [Green Version]
- Motalleb, M.; Reihani, E.; Ghorbani, R. Optimal placement and sizing of the storage supporting transmission and distribution networks. Renew. Energy 2016, 94, 651–659. [Google Scholar] [CrossRef] [Green Version]
- Mortaz, E. Portfolio Diversification for an Intermediary Energy Storage Merchant. IEEE Trans. Sustain. Energy 2019, 11, 1539–1547. [Google Scholar] [CrossRef]
- Mortaz, E.; Vinel, A.; Dvorkin, Y. An optimization model for siting and sizing of vehicle-to-grid facilities in a microgrid. Appl. Energy 2019, 242, 1649–1660. [Google Scholar] [CrossRef]
- Zhang, X.; Guo, L.; Zhang, H.; Guo, L.; Feng, K.; Lin, J. An Energy Scheduling Strategy With Priority Within Islanded Microgrids. IEEE Access 2019, 7, 135896–135908. [Google Scholar] [CrossRef]
- Bracco, S.; Delfino, F.; Longo, M.; Siri, S. Electric Vehicles and Storage Systems Integrated within a Sustainable Urban District Fed by Solar Energy. J. Adv. Transp. 2019, 2019, 9572746. [Google Scholar] [CrossRef] [Green Version]
- Fu, B.; Chen, M.; Fei, Z.; Wu, J.; Xu, X.; Gao, Z.; Wu, Z.; Yang, Y. Research on the Stackelberg Game Method of Building Micro-grid with Electric Vehicles. J. Electr. Eng. Technol. 2021, 16, 1637–1649. [Google Scholar] [CrossRef]
- Ferro, G.; Laureri, F.; Minciardi, R.; Robba, M. A predictive discrete event approach for the optimal charging of electric vehicles in microgrids. Control Eng. Pract. 2019, 86, 11–23. [Google Scholar] [CrossRef]
- Luis, S.Y.; Reina, D.G.; Marín, S.L.T. A Multiagent Deep Reinforcement Learning Approach for Path Planning in Autonomous Surface Vehicles: The Ypacaraí Lake Patrolling Case. IEEE Access 2021, 9, 17084–17099. [Google Scholar] [CrossRef]
- Yanes Luis, S.; Gutiérrez-Reina, D.; Toral Marín, S. A Dimensional Comparison between Evolutionary Algorithm and Deep Reinforcement Learning Methodologies for Autonomous Surface Vehicles with Water Quality Sensors. Sensors 2021, 21, 2862. [Google Scholar] [CrossRef]
- Malek, Y.N.; Najib, M.; Bakhouya, M.; Essaaidi, M. Multivariate deep learning approach for electric vehicle speed forecasting. Big Data Min. Anal. 2021, 4, 56–64. [Google Scholar] [CrossRef]
- Lu, C.; Gao, L.; Yi, J.; Li, X. Energy-efficient scheduling of distributed flow shop with heterogeneous factories: A real-world case from automobile industry in China. IEEE Trans. Ind. Inform. 2020, 17, 6687–6696. [Google Scholar] [CrossRef]
- InsideEVs. Top 10 Best-Selling Plug-In Electric Cars in U.S.—2019 Edition. 2020. Available online: https://insideevs.com/news/392375/top-10-electric-cars-sales-us-2019/ (accessed on 25 June 2021).
- Wu, X.; Wang, X.; Qu, C. A hierarchical framework for generation scheduling of microgrids. IEEE Trans. Power Deliv. 2014, 29, 2448–2457. [Google Scholar] [CrossRef]
- Zidan, A.; El-Saadany, E. Incorporating customers’ reliability requirements and interruption characteristics in service restoration plans for distribution systems. Energy 2015, 87, 192–200. [Google Scholar] [CrossRef]
- Gabbar, H.A.; Zidan, A. Optimal scheduling of interconnected micro energy grids with multiple fuel options. Sustain. Energy Grids Netw. 2016, 7, 80–89. [Google Scholar] [CrossRef]
- Li, Y.F.; Lin, Y.H.; Zio, E. Stochastic Modeling by Inhomogeneous Continuous Time Markov Chains. In Proceedings of the EURO Workshop on Stochastic Modelling, Paris, France, 30 May–1 June 2012. [Google Scholar]
- Iannuzzi, D.; Franzese, P. Ultrafast charging station for electrical vehicles: Dynamic modelling, design and control strategy. Math. Comput. Simul. 2021, 184, 225–243. [Google Scholar] [CrossRef]
- Lipowski, A.; Lipowska, D. Roulette-wheel selection via stochastic acceptance. Phys. A Stat. Mech. Appl. 2012, 391, 2193–2196. [Google Scholar] [CrossRef] [Green Version]
- PJM. Available online: https://www.pjm.com/ (accessed on 15 December 2021).
- Moradijoz, M.; Moghaddam, M.P.; Haghifam, M.; Alishahi, E. A multi-objective optimization problem for allocating parking lots in a distribution network. Int. J. Electr. Power Energy Syst. 2013, 46, 115–122. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Unit |
|---|---|---|
| Number of vehicles | 200 | Vehicle |
| Charger capacity | 0.02 | MWh |
| Peak load | 0.96 | Mwh |
| Converter efficiency | 85 | % |
| Battery capacity | 0.04 | Mwh |
| Battery efficiency | 80 | % |
| Decision | Number of Charging EVs | Number of Discharging EVs |
|---|---|---|
| 0 | ||
| 0 | ||
| 0 | 0 |
| Day Quarter | Q1 | Q2 | Q3 | Q4 |
|---|---|---|---|---|
| Arrival Rate | 70.0 | 60.0 | 15.0 | 10.0 |
| Departure Rate | 0.33 | 0.30 | 0.50 | 0.40 |
| Uncertainty Level | Z-Score | Samples Percentage |
|---|---|---|
| 0.1256 | 10% | |
| 0.32 | 25% | |
| 0.6745 | 50% | |
| 1.15 | 75% | |
| 1.96 | 95% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Abdel-Hakim, A.E.; Abo-Elyousr, F.K. Heuristic Greedy Scheduling of Electric Vehicles in Vehicle-to-Grid Microgrid Owned Aggregators. Sensors 2022, 22, 2408. https://doi.org/10.3390/s22062408
Abdel-Hakim AE, Abo-Elyousr FK. Heuristic Greedy Scheduling of Electric Vehicles in Vehicle-to-Grid Microgrid Owned Aggregators. Sensors. 2022; 22(6):2408. https://doi.org/10.3390/s22062408
Chicago/Turabian StyleAbdel-Hakim, Alaa E., and Farag K. Abo-Elyousr. 2022. "Heuristic Greedy Scheduling of Electric Vehicles in Vehicle-to-Grid Microgrid Owned Aggregators" Sensors 22, no. 6: 2408. https://doi.org/10.3390/s22062408
APA StyleAbdel-Hakim, A. E., & Abo-Elyousr, F. K. (2022). Heuristic Greedy Scheduling of Electric Vehicles in Vehicle-to-Grid Microgrid Owned Aggregators. Sensors, 22(6), 2408. https://doi.org/10.3390/s22062408