
Combating Single-Frequency Jamming through a Multi-Frequency, Multi-Constellation Software Receiver: A Case Study for Maritime Navigation in the Gulf of Finland


Abstract
:1. Introduction
2. Materials and Methods
2.1. FGI-GSRx Multi-Frequency, Multi-Constellation Receiver
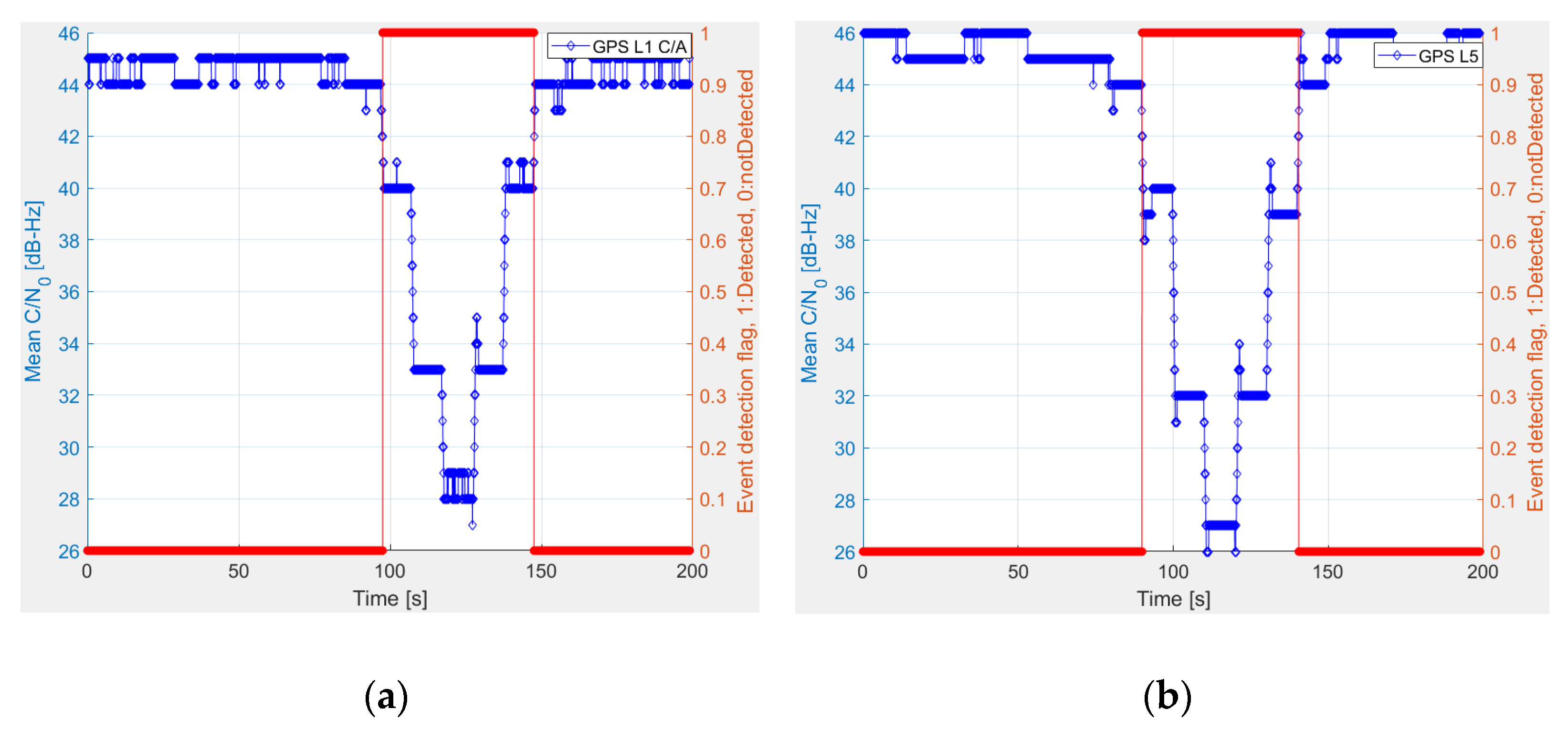
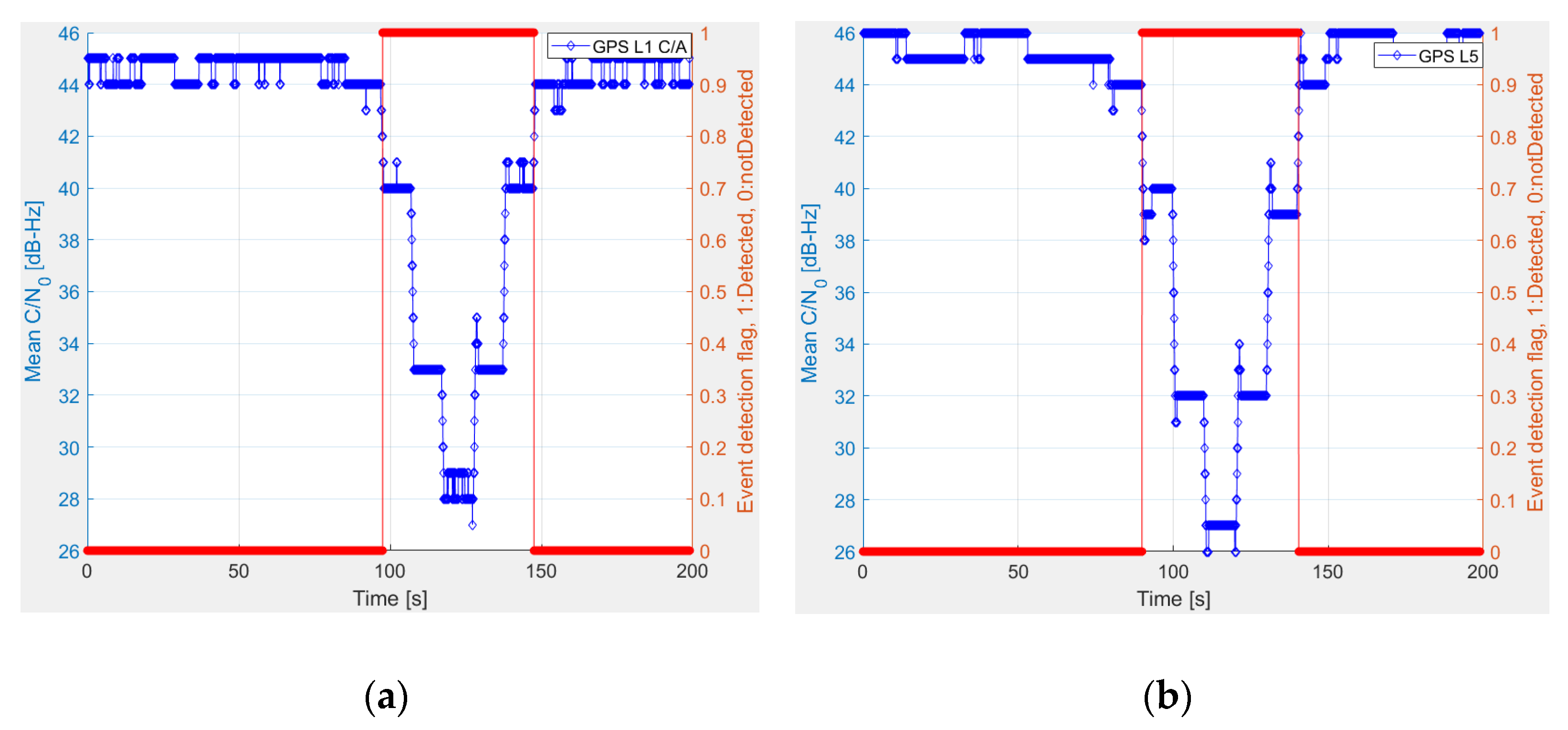
2.2. Jamming Event Detector
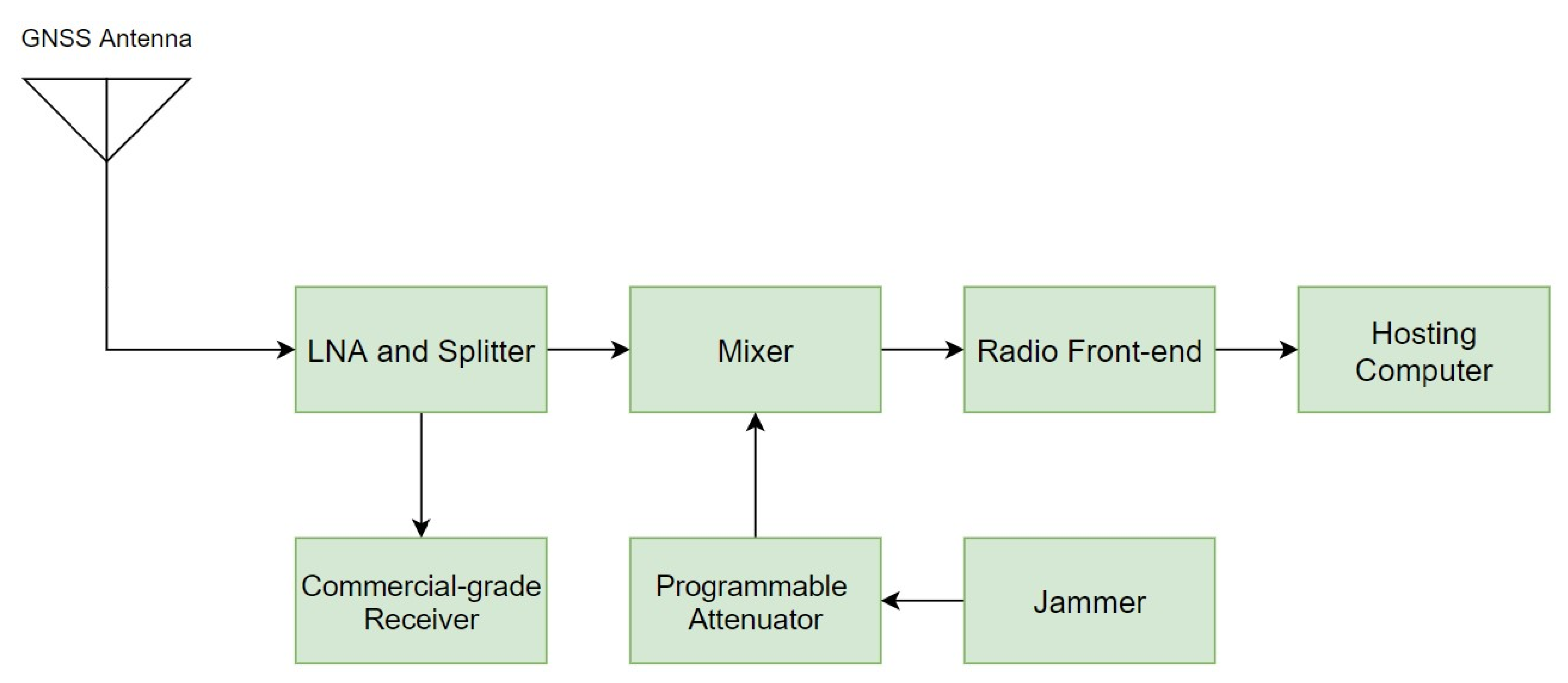
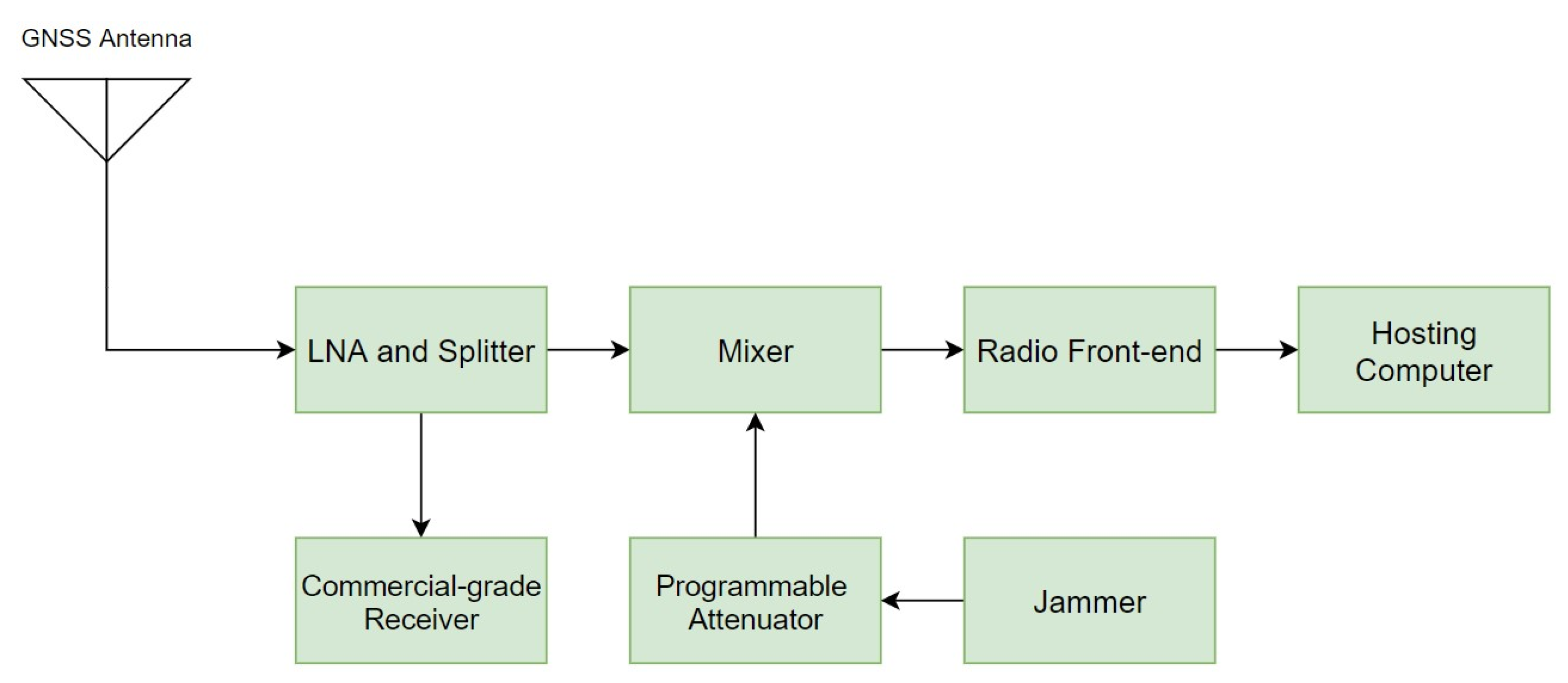
2.3. Test Setup and Data Collection
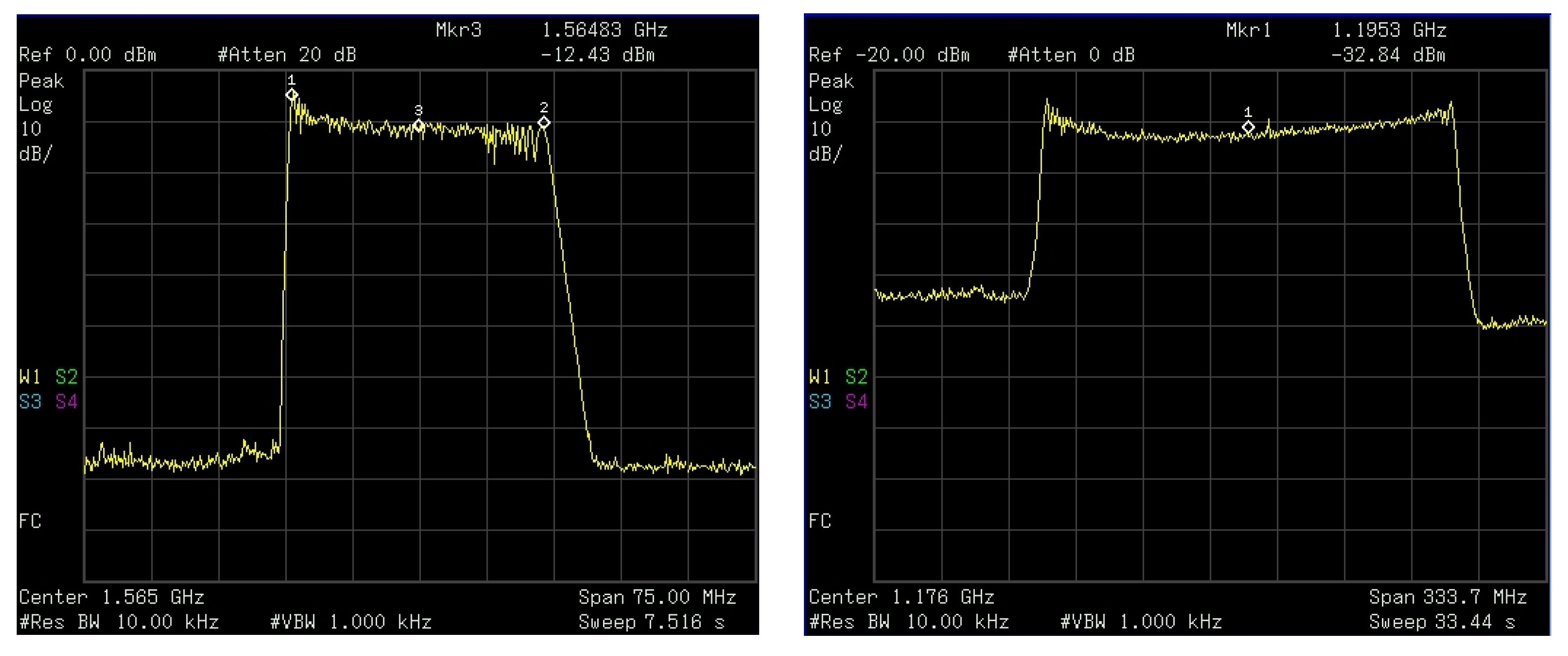
2.4. Jammer Characterization
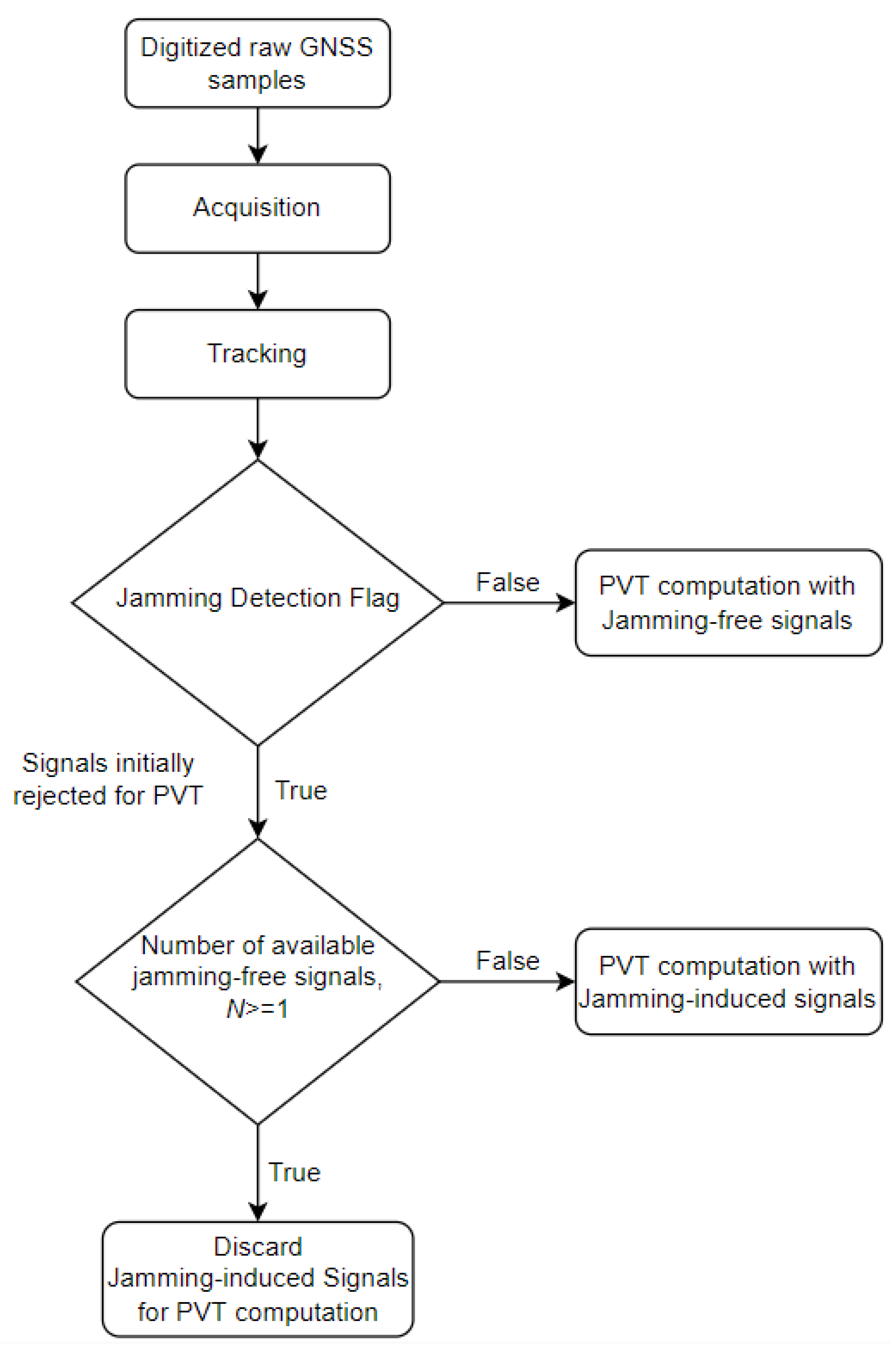
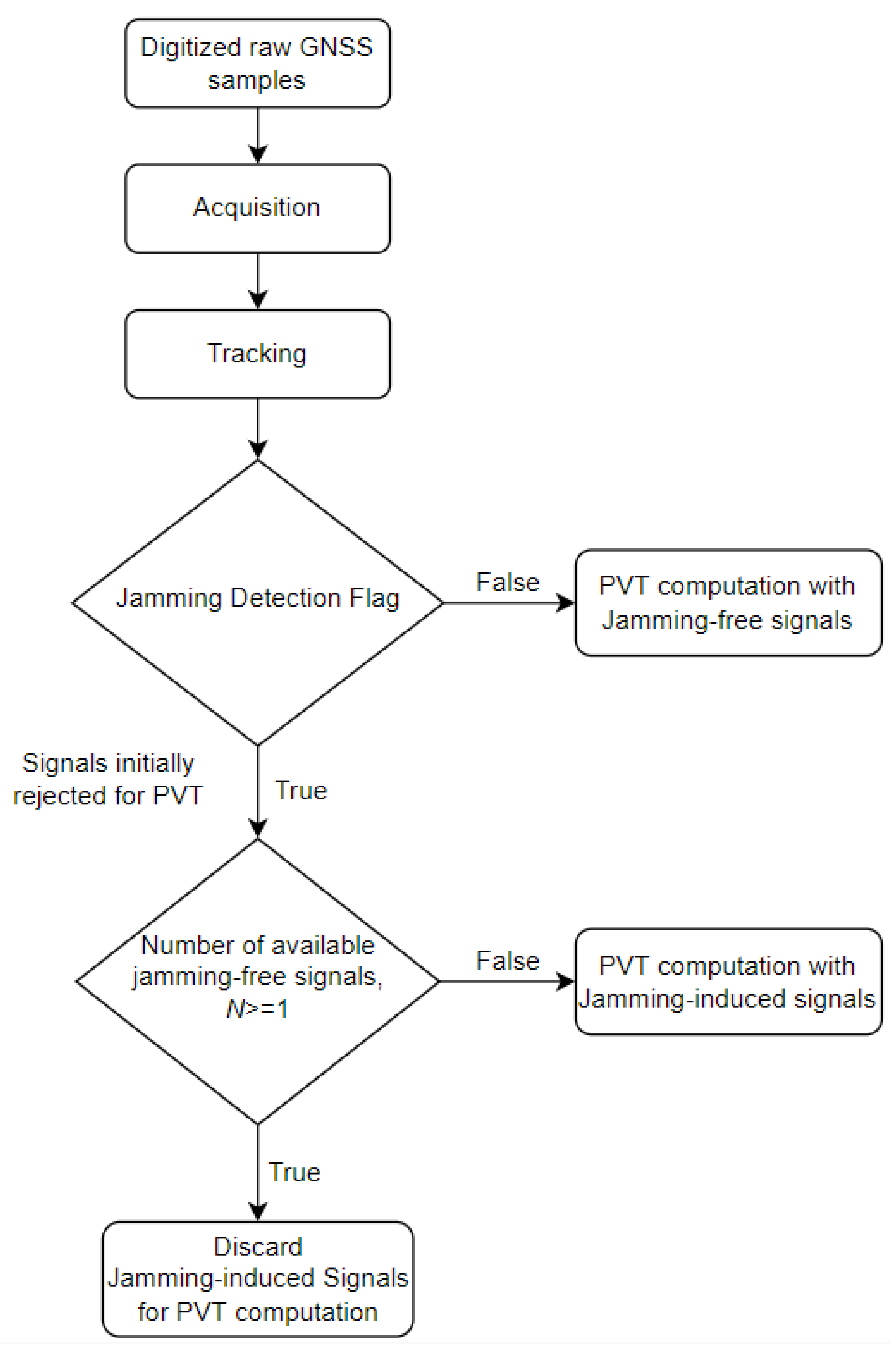
3. Proposed Resilient MFMC Receiver
4. Test Scenarios
- Scenario I: Nominal maritime navigation without the presence of jamming.
- Scenario II: Maritime navigation under the influence of jamming on GNSS L1/E1/B1 signal.
- Scenario III: Maritime navigation under the influence of jamming on GNSS L5/E5a/E5b signal.
- Scenario IV: Maritime Navigation Under the Influence of Jamming on Lower and Upper L-bands.
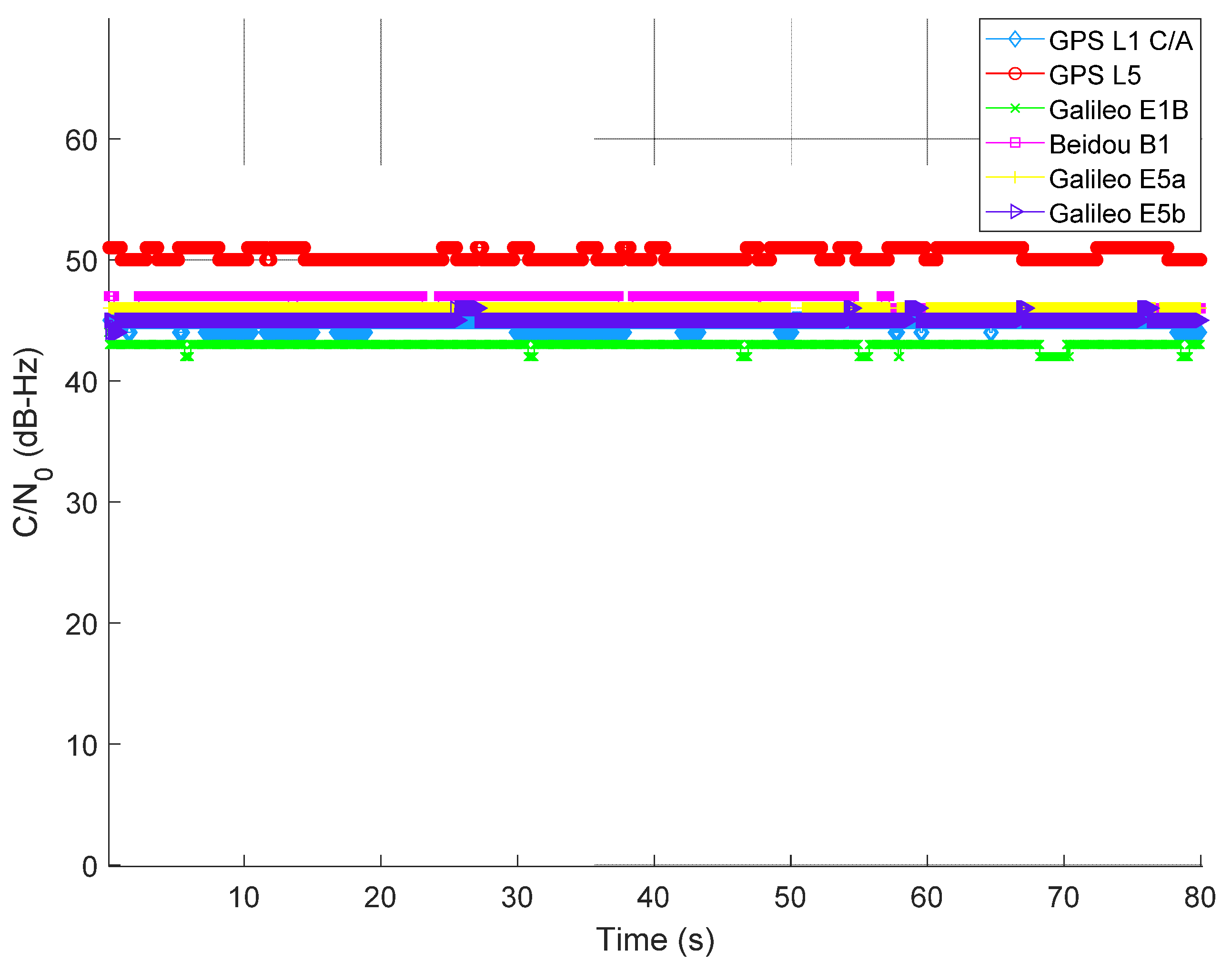
4.1. Scenario I: Nominal Maritime Navigation without the Presence of Jamming
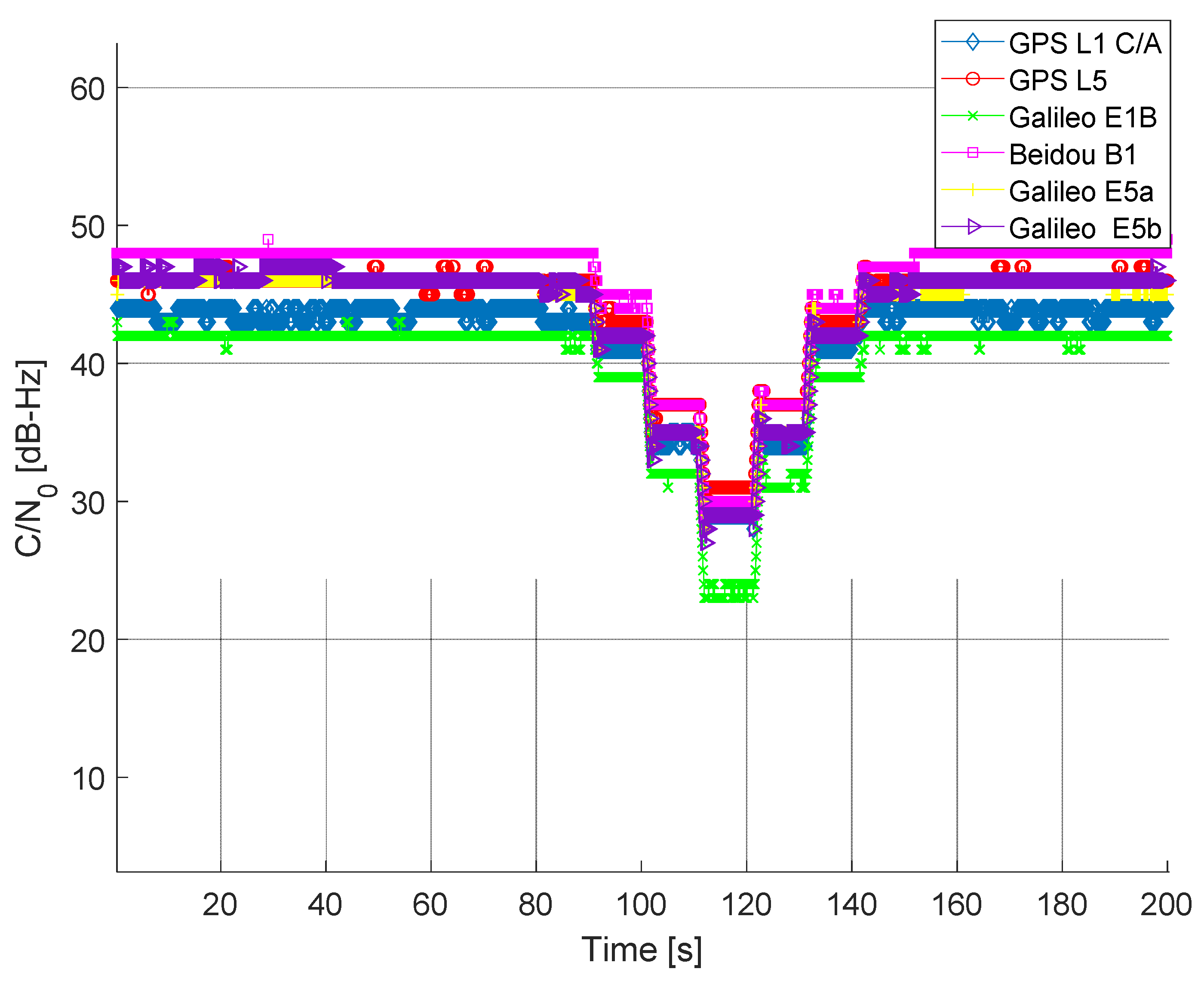
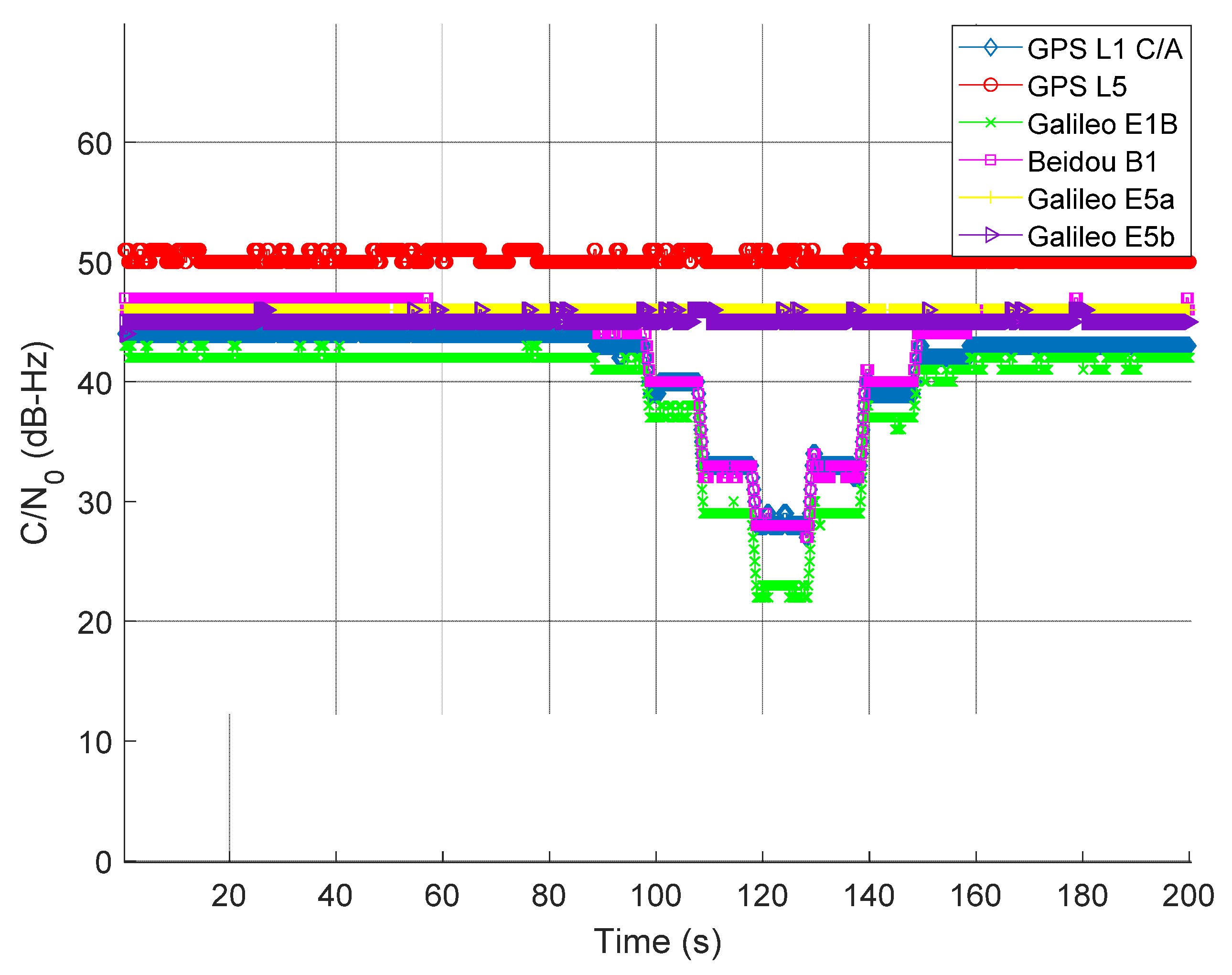
4.2. Scenario II: Maritime Navigation under the Influence of Jamming on GNSS L1/E1/B1 Signal
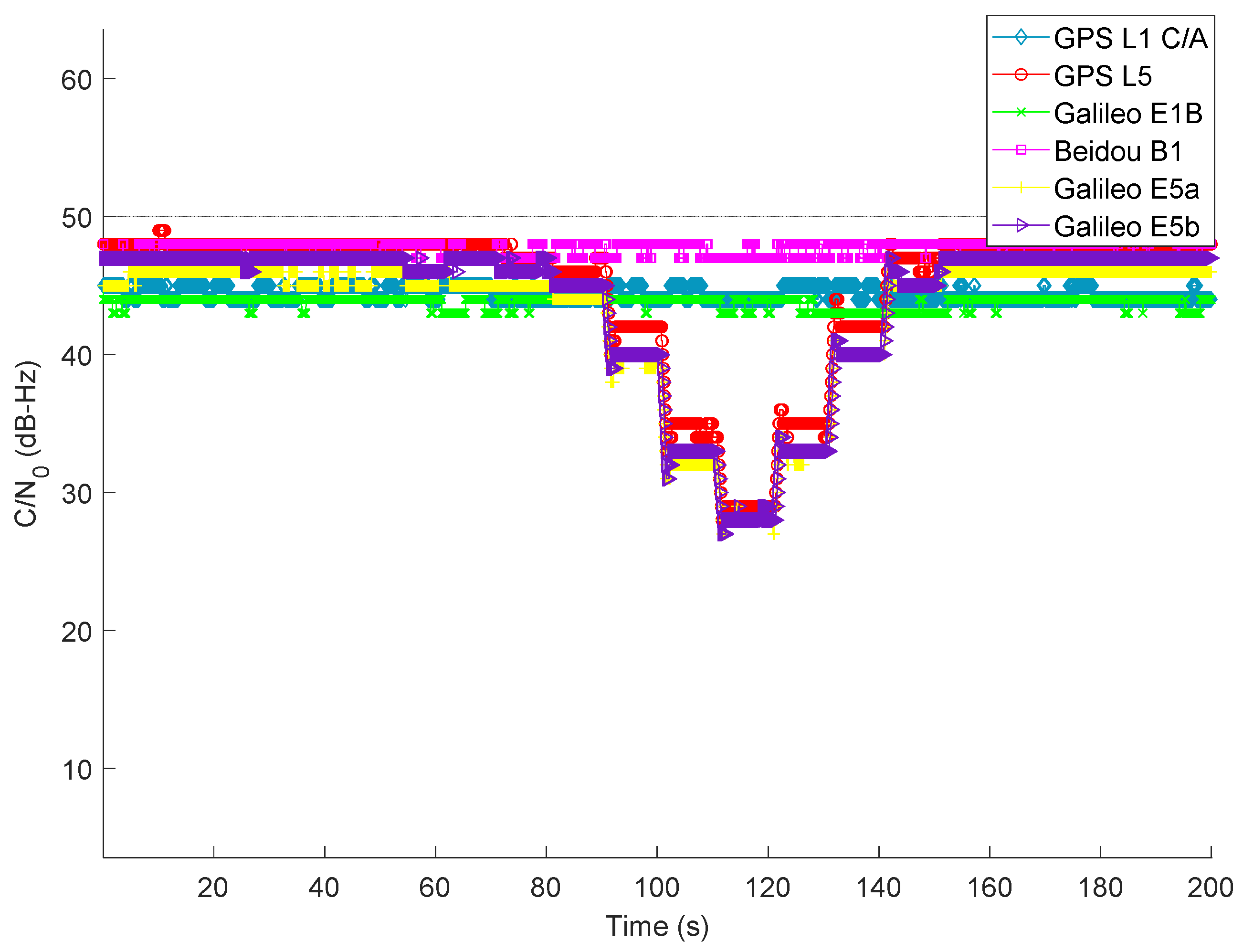
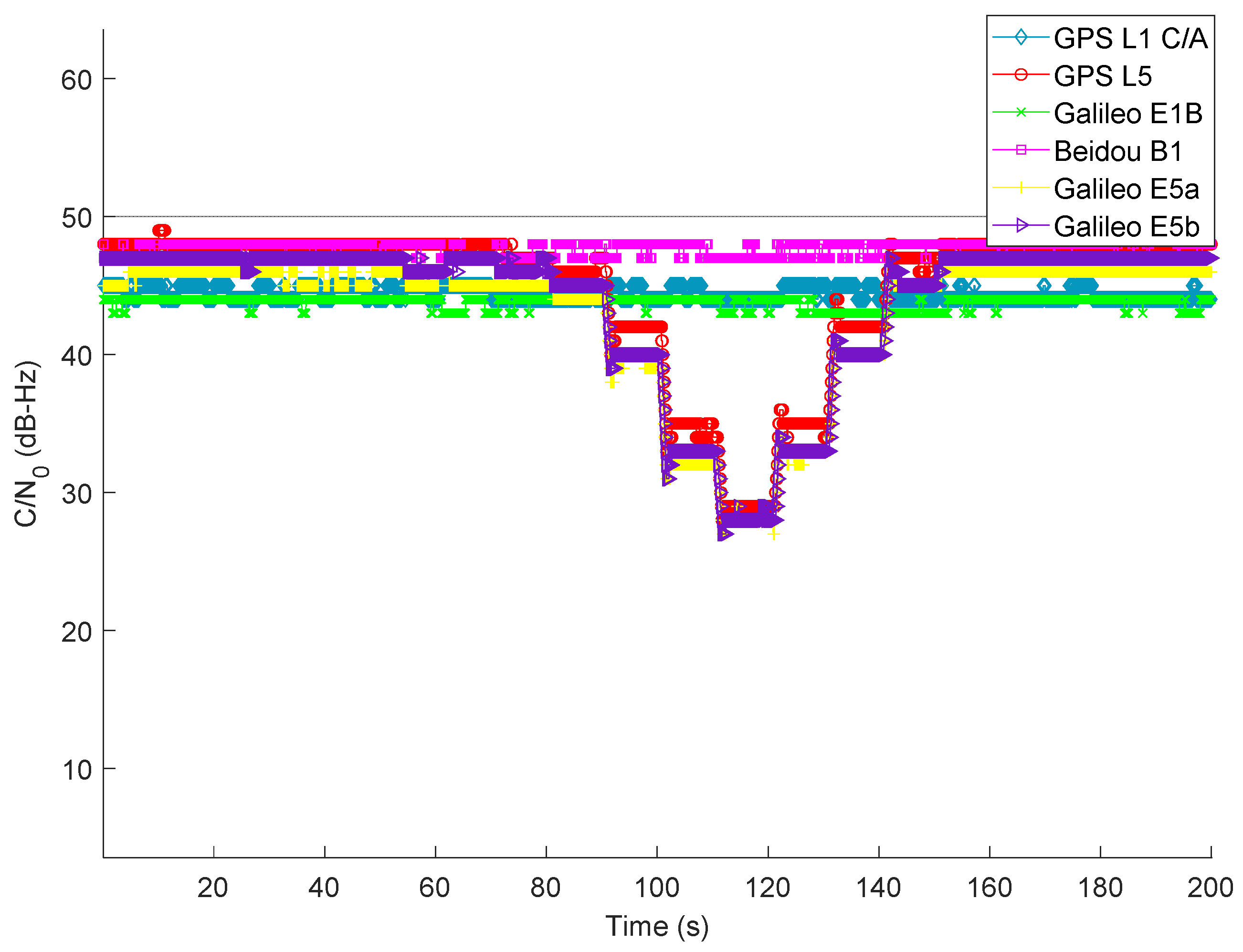
4.3. Scenario III: Maritime Navigation under the Influence of Jamming on GNSS L5/E5a/E5b Signal
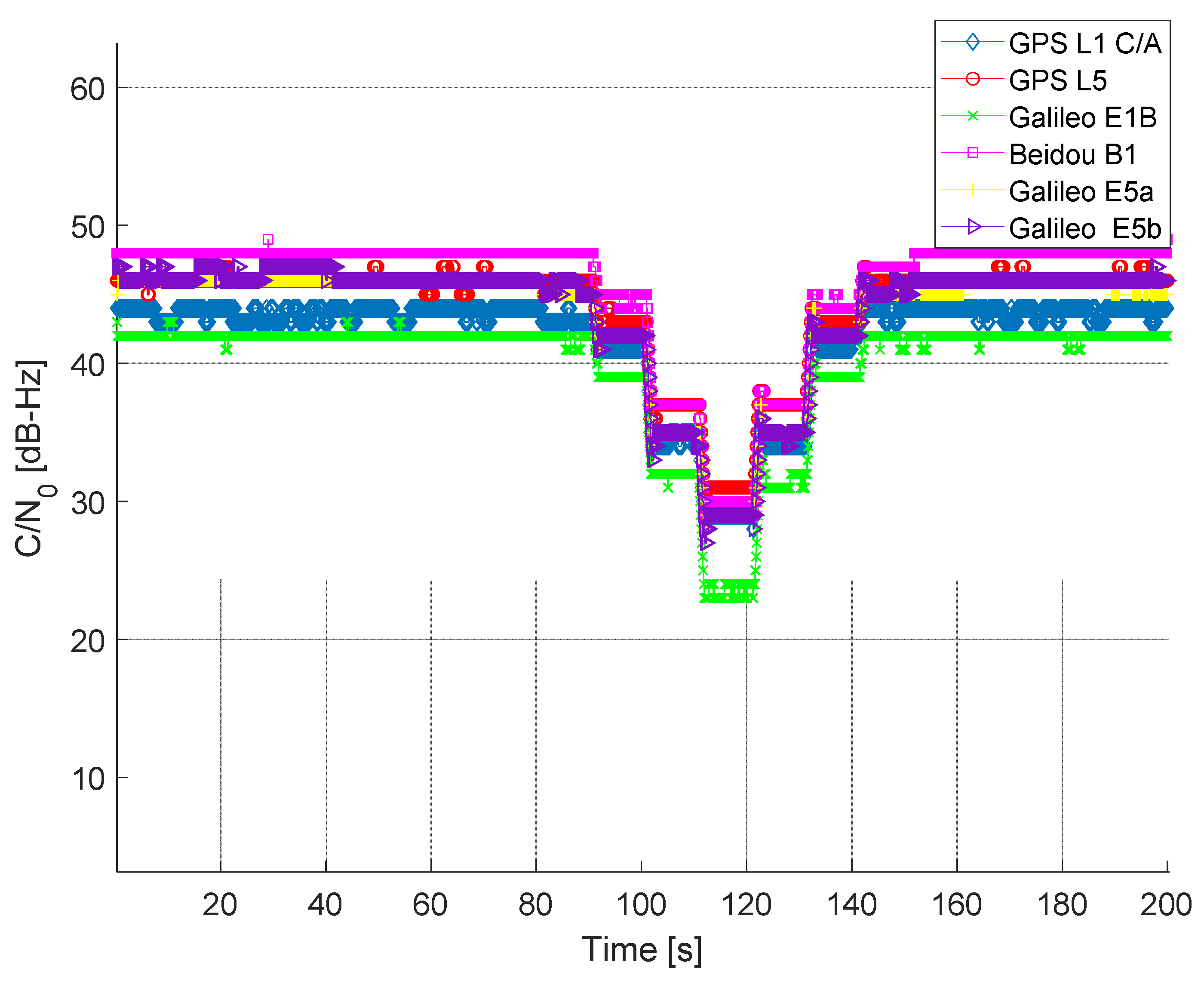
4.4. Scenario IV: Maritime Navigation under the Influence of Jamming on Lower and Upper L-Bands
5. Results
5.1. Reference Trajectory Generation
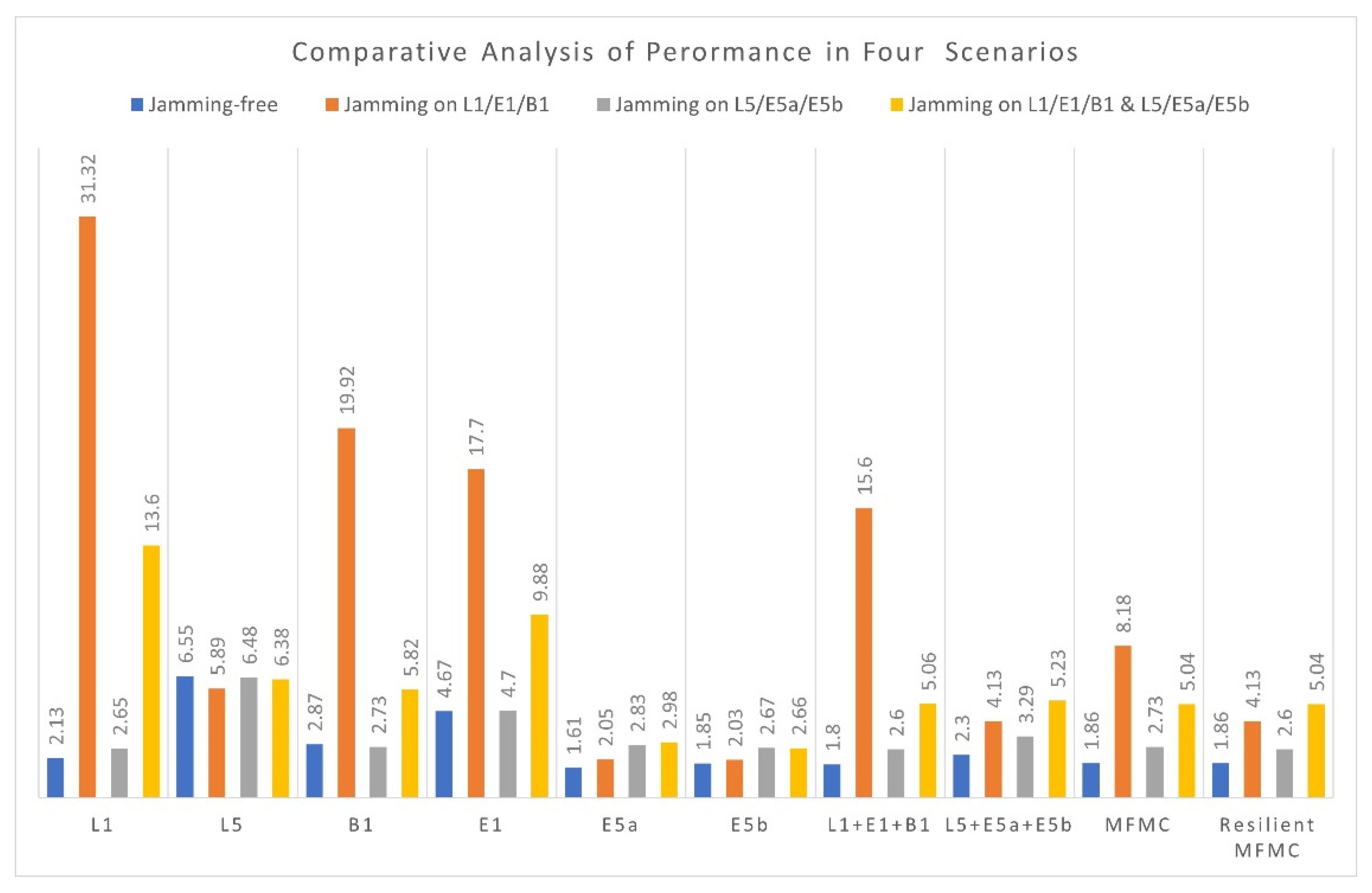
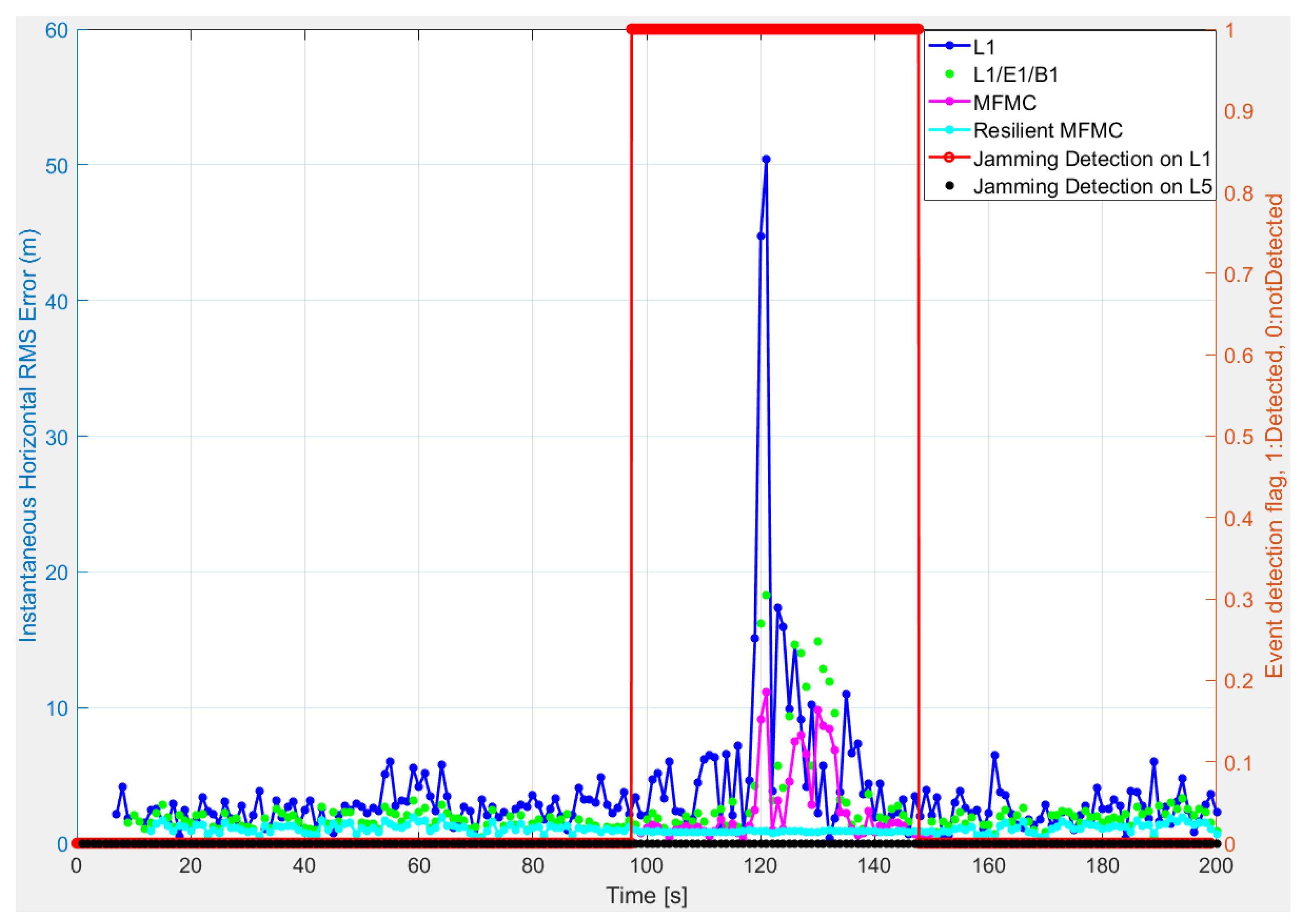
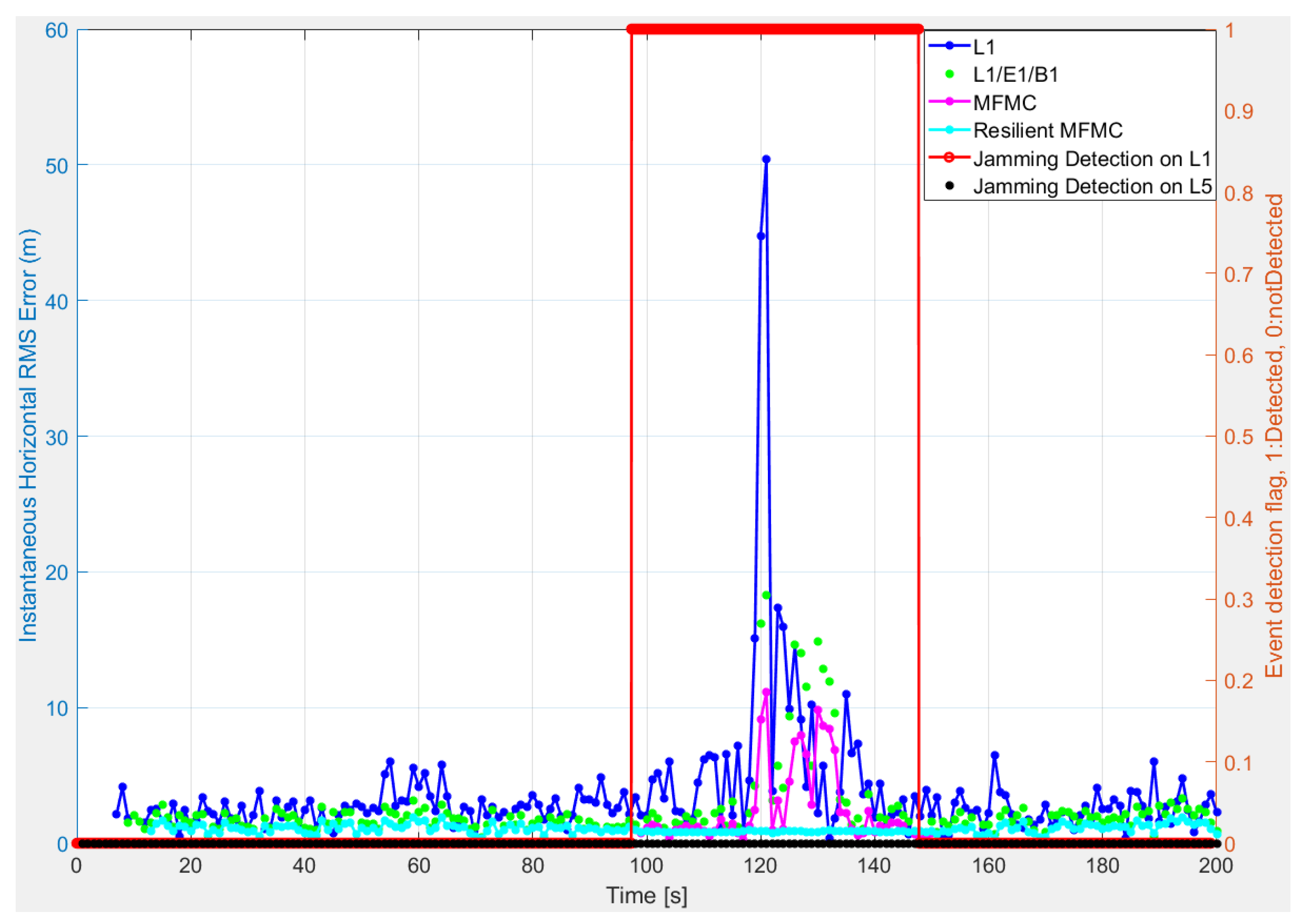
5.2. Positioning Performance Analysis
6. Conclusions
- Implementation of a jamming event detector to identify jamming on any GNSS signals.
- Implementation and validation of a novel resilient MFMC receiver to combat jamming on any single-frequency band.
- The first navigation results of single-frequency GPS L5, Galileo E5a, and Galileo E5b signals in a maritime operational environment utilizing an in-house research receiver.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Expanding Opportunities for Maritime Use of GNSS. Available online: https://www.gsa.europa.eu/gnss-applications/segment/maritime/expanding-opportunities-maritime-use-gnss (accessed on 15 October 2021).
- Maritime. Available online: https://www.gsa.europa.eu/segment/maritime (accessed on 15 October 2021).
- Gourlay, T.P.; Cray, W.G. Ship Under-Keel Clearance Monitoring Using RTK GPS. In Proceedings of the Coasts and Ports, Wellington, New Zealand, 16–18 September 2009. [Google Scholar]
- Guy, B. Thousands of GNSS Jamming and Spoofing Incidents Reported in 2020. Available online: https://www.linkedin.com/pulse/thousands-gnss-jamming-spoofing-incidents-reported-2020-guy-buesnel/ (accessed on 4 October 2021).
- Resilient Navigation and Timing Foundation (RNTF), U.S. Navy Ship Spoofed to Crimea. 2021. Available online: https://rntfnd.org/2021/06/30/u-s-navy-ship-spoofed-to-crimea/ (accessed on 4 October 2021).
- GPS Problem Repots Status, U.S. Coast Guard Navigation Center (NAVCEN). 2021. Available online: https://navcen.uscg.gov/?Do=GPSReportStatus#definition (accessed on 31 January 2022).
- Erol, S. A Comparative Study for Performance Analysis of Kinematic Multi-Constellation GNSS PPP in Dynamic Environment. J. Mar. Sci. Eng. 2020, 8, 514. [Google Scholar] [CrossRef]
- Kos, S.; Pongračić, B.; Brčić, D. A study on multi—Constellation GNSS positioning performance in terms of maritime requirements. In Proceedings of the 12th Annual Baška GNSS Conference, Baška, Croatia, 6–9 May 2018. [Google Scholar]
- Marcos, E.P.; Caizzone, S.; Konovaltsev, A.; Cuntz, M.; Elmarissi, W.; Yinusa, K.; Meurer, M. Interference awareness and characterization for GNSS maritime applications. In Proceedings of the 2018 IEEE/ION Position, Location and Navigation Symposium (PLANS), Monterey, CA, USA, 23 April 2018; pp. 908–919. [Google Scholar] [CrossRef]
- Marcos, E.P.; Konovaltsev, A.; Caizzone, S.; Cuntz, M.; Yinusa, K.; Elmarissi, W.; Meurer, M. Interference and spoofing detection for GNSS maritime applications using direction of arrival and conformal antenna array. In Proceedings of the 31st International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS+ 2018), Miami, FL, USA, 28 September 2018; pp. 2907–2922. [Google Scholar] [CrossRef] [Green Version]
- Medina, D.; Lass, C.; Marcos, E.P.; Ziebold, R.; Closas, P.; García, J. On GNSS jamming threat from the maritime navigation perspective. In Proceedings of the 2019 22th International Conference on Information Fusion (FUSION), Ottawa, ON, Canada, 2–5 July 2019; pp. 1–7. [Google Scholar]
- Grant, A.; Williams, P.; Ward, N.; Basker, S. GPS jamming and the impact on maritime navigation. J. Navig. 2009, 62, 173–187. [Google Scholar] [CrossRef] [Green Version]
- Glomsvoll, O.; Bonenberg, L.K. GNSS jamming resilience for close to shore navigation in the Northern Sea. J. Navig. 2017, 70, 33–48. [Google Scholar] [CrossRef] [Green Version]
- Bhuiyan, M.Z.H.; Söderholm, S.; Thombre, S.; Ruotsalainen, L.; Kuusniemi, H. Overcoming the challenges of BeiDou receiver implementation. Sensors 2014, 14, 22082–22098. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Söderholm, S.; Bhuiyan, M.Z.H.; Thombre, S.; Ruotsalainen, L.; Kuusniemi, H. A multi-GNSS software-defined receiver: Design, implementation, and performance benefits. Ann. Telecommun. 2016, 71, 399–410. [Google Scholar] [CrossRef] [Green Version]
- Islam, S.; Bhuiyan, M.Z.H.; Linty, N.; Thombre, S. GPS L5 Software Receiver Implementation in FGI-GSRx; International Union of Radio Science (URSI): Tampere, Finland, 2019. [Google Scholar] [CrossRef]
- Linty, N.; Bhuiyan, M.Z.H.; Kirkko-Jaakkola, M. Opportunities and challenges of Galileo E5 wideband real signals processing. In Proceedings of the 2020 International Conference on Localization and GNSS (ICL-GNSS), Tampere, Finland, 2–4 June 2020; pp. 1–6. [Google Scholar] [CrossRef]
- FGI-GSRx Software Receiver, the National Land Survey of Finland. Available online: https://www.maanmittauslaitos.fi/en/fgi-gsrx-os (accessed on 28 February 2022).
- Bhuiyan, M.Z.H.; Kuusniemi, H.; Söderholm, S.; Airos, E. The impact of interference on GNSS receiver observables—A running digital sum based simple jammer detector. Radioengineering 2014, 23, 898–906. [Google Scholar]
- Ferrara, N.G.; Bhuiyan, M.Z.H.; Söderholm, S.; Ruotsalainen, L.; Kuusniemi, H. A new implementation of narrowband interference detection, characterization, and mitigation technique for a software-defined multi-GNSS receiver. GPS Solut. 2018, 22, 106. [Google Scholar] [CrossRef] [Green Version]
- Thombre, S.; Bhuiyan, M.Z.H.; Eliardsson, P.; Gabrielsson, B.; Pattinson, M.; Dumville, M.; Fryganiotis, D.; Hill, S.; Manikundalam, V.; Pölöskey, M.; et al. GNSS threat monitoring and reporting: Past, present, and a proposed future. J. Navig. 2018, 71, 513–529. [Google Scholar] [CrossRef] [Green Version]
- Mini-Circuit Programmable Attenuator. Available online: https://www.minicircuits.com/WebStore/dashboard.html?model=RUDAT-4000-120 (accessed on 15 October 2021).
- MS Megastar. Available online: https://fi.wikipedia.org/wiki/M/S_Megastar#/media/Tiedosto:Megastar_departing_Tallinn_1_February_2017.jpg (accessed on 8 February 2022).
- Rügamer, A.; Förster, F.; Stahl, M.; Rohmer, G. Features and applications of the adaptable Flexiband USB3. 0 front-end. In Proceedings of the 27th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS+ 2014), Tampa, FL, USA, 8–12 September 2014; pp. 330–362. [Google Scholar]
- Kirkko-Jaakkola, M.; Ruotsalainen, L.; Bhuiyan, M.Z.H.; Söderholm, S.; Thombre, S.; Kuusniemi, H. Performance of a MEMS IMU Deeply Coupled with a GNSS Receiver under Jamming. In Proceedings of the 2014 Ubiquitous Positioning Indoor Navigation and Location Based Service (UPINLBS), Corpus Christi, TX, USA, 20–21 November 2014; pp. 64–70. [Google Scholar]
- Ruotsalainen, L.; Kirkko-Jaakkola, M.; Bhuiyan, M.Z.H.; Söderholm, S.; Thombre, S.; Kuusniemi, H. Deeply coupled GNSS, INS and visual sensor integration for interference mitigation. In Proceedings of the 27th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2014), Tampa, FL, USA, 8–12 September 2014; pp. 2243–2249. [Google Scholar]
- Borio, D. A multi-state notch filter for GNSS jamming mitigation. In Proceedings of the International Conference on Localization and GNSS 2014 (ICL-GNSS 2014), Helsinki, Finland, 24–26 June 2014; pp. 1–6. [Google Scholar]
- Bastide, F.; Akos, D.; Macabiau, C.; Roturier, B. Automatic gain control (AGC) as an interference assessment tool. In Proceedings of the 16th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GPS/GNSS 2003), Portland, OR, USA, 9–12 September 2003; pp. 2042–2053. [Google Scholar]
- Borowski, H.; Isoz, O.; Eklöf, F.M.; Lo, S.; Akos, D. Detecting False Signals; GPS World: Cleveland, OH, USA, 2012. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| L1/E1/B1 | L5/E5a/E5b | |||||
|---|---|---|---|---|---|---|
| Signals | Event Start (s) | Event End (s) | Duration (s) | Event Start (s) | Event End (s) | Duration (s) |
| L1 | 97 | 148 | 51 | - | - | - |
| E1 | 97 | 148 | 51 | - | - | - |
| B1 | 97 | 148 | 51 | - | - | - |
| L5 | - | - | - | 90 | 141 | 51 |
| E5a | - | - | - | 90 | 141 | 51 |
| E5b | - | - | - | 90 | 141 | 51 |
| Parameters | Frequency Bands (L1/E1/B1) | Frequency Bands (L5/E5a, E5b) |
|---|---|---|
| Center frequency (MHz) | 1574.890625 | 1192.50 |
| Sampling rate (MHz) | 40.5 | 81 |
| Data type | Complex | Complex |
| Sample bit width | 8 bit + 8 bit (I + Q) | 8 bit + 8 bit (I + Q) |
| Bandwidth (MHz) | 38 | 54 |
| Parameters | L1 Jammer | L5 Wideband Jammer |
|---|---|---|
| Center frequency (MHz) | 1564.74 | 1195.30 |
| Bandwidth (MHz) | 28.20 | 200 |
| Impacted GNSS signals | L1/E1/B1 | Lower L-band |
| Scenario I (Nominal Situation) | |||||
|---|---|---|---|---|---|
| GNSS Signals | Horizontal RMS (m) | Vertical RMS (m) | 3D-RMS (m) | PDOP | |
| L1 | 1.69 | 1.30 | 2.13 | 2.41 | 6 |
| L5 | 1.87 | 6.27 | 6.55 | 3.89 | 5 |
| B1 | 2.71 | 0.95 | 2.87 | 2.35 | 7 |
| E1 | 2.71 | 3.80 | 4.67 | 2.93 | 6 |
| E5a | 1.44 | 0.72 | 1.61 | 2.37 | 7 |
| E5b | 1.57 | 0.97 | 1.85 | 2.93 | 6 |
| L1 + E1 + B1 | 0.89 | 1.56 | 1.80 | 1.29 | 19 |
| L5 + E5a + E5b | 0.84 | 2.14 | 2.30 | 1.37 | 18 |
| MFMC (L1 + E1 + B1 + L5 + E5a + E5b) | 0.53 | 1.78 | 1.86 | 0.93 | 37 |
| Resilient MFMC | 0.53 | 1.78 | 1.86 | 0.93 | 37 |
| Scenario II (Jamming on L1/E1/B1 Band) | |||||
|---|---|---|---|---|---|
| GNSS Signals | Horizontal RMS (m) | Vertical RMS (m) | 3D-RMS (m) | PDOP | |
| L1 | 13.27 | 28.36 | 31.32 | 2.12 | 7 |
| L5 | 4.95 | 3.18 | 5.89 | 4.80 | 5 |
| B1 | 12.74 | 15.31 | 19.92 | 2.79 | 7 |
| E1 | 11.43 | 13.51 | 17.70 | 2.63 | 7 |
| E5a | 1.93 | 0.67 | 2.05 | 2.63 | 7 |
| E5b | 1.94 | 0.61 | 2.03 | 2.63 | 7 |
| L1+ E1 + B1 | 6.44 | 14.20 | 15.60 | 1.29 | 21 |
| L5 + E5a + E5b | 0.88 | 4.03 | 4.13 | 1.53 | 19 |
| MFMC (L1 + E1 + B1 + L5 + E5a + E5b) | 3.29 | 7.49 | 8.18 | 0.97 | 40 |
| Resilient MFMC | 0.88 | 4.03 | 4.13 | 1.53 | 19 |
| Scenario III (Jamming on L5/E5a/E5b Band) | |||||
|---|---|---|---|---|---|
| GNSS Signals | Horizontal RMS (m) | Vertical RMS (m) | 3D-RMS (m) | PDOP | |
| L1 | 1.17 | 2.37 | 2.65 | 2.41 | 6 |
| L5 | 2.04 | 6.15 | 6.48 | 3.90 | 5 |
| B1 | 2.47 | 1.18 | 2.73 | 2.35 | 7 |
| E1 | 3.30 | 3.35 | 4.70 | 2.91 | 6 |
| E5a | 2.03 | 1.97 | 2.83 | 2.38 | 7 |
| E5b | 1.81 | 1.97 | 2.67 | 2.91 | 6 |
| L1 + E1 + B1 | 0.78 | 2.47 | 2.60 | 1.29 | 19 |
| L5 + E5a + E5b | 1.05 | 3.12 | 3.29 | 1.36 | 18 |
| MFMC (L1 + E1 + B1 + L5 + E5a + E5b) | 0.782 | 2.62 | 2.73 | 0.92 | 37 |
| Resilient MFMC | 0.78 | 2.47 | 2.60 | 1.29 | 19 |
| Scenario IV (Jamming on Both L1/E1/B1 and L5/E5a/E5b Bands) | |||||
|---|---|---|---|---|---|
| GNSS Signals | Horizontal RMS (m) | Vertical RMS (m) | 3D-RMS (m) | PDOP | |
| L1 | 6.29 | 12.05 | 13.60 | 1.69 | 8 |
| L5 | 2.91 | 5.68 | 6.38 | 4.22 | 5 |
| B1 | 2.63 | 5.19 | 5.82 | 3.40 | 6 |
| E1 | 5.87 | 7.94 | 9.88 | 2.00 | 8 |
| E5a | 1.73 | 2.42 | 2.98 | 2.00 | 8 |
| E5b | 1.78 | 1.98 | 2.66 | 2.12 | 7 |
| L1 + E1 + B1 | 3.14 | 3.97 | 5.06 | 1.13 | 22 |
| L5 + E5a + E5b | 0.86 | 5.16 | 5.23 | 1.25 | 20 |
| MFMC (L1 + E1 + B1 + L5 + E5a + E5b) | 2.19 | 4.53 | 5.04 | 0.84 | 42 |
| Resilient MFMC | 2.19 | 4.53 | 5.04 | 0.84 | 42 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Islam, S.; Bhuiyan, M.Z.H.; Thombre, S.; Kaasalainen, S. Combating Single-Frequency Jamming through a Multi-Frequency, Multi-Constellation Software Receiver: A Case Study for Maritime Navigation in the Gulf of Finland. Sensors 2022, 22, 2294. https://doi.org/10.3390/s22062294
Islam S, Bhuiyan MZH, Thombre S, Kaasalainen S. Combating Single-Frequency Jamming through a Multi-Frequency, Multi-Constellation Software Receiver: A Case Study for Maritime Navigation in the Gulf of Finland. Sensors. 2022; 22(6):2294. https://doi.org/10.3390/s22062294
Chicago/Turabian StyleIslam, Saiful, Mohammad Zahidul H. Bhuiyan, Sarang Thombre, and Sanna Kaasalainen. 2022. "Combating Single-Frequency Jamming through a Multi-Frequency, Multi-Constellation Software Receiver: A Case Study for Maritime Navigation in the Gulf of Finland" Sensors 22, no. 6: 2294. https://doi.org/10.3390/s22062294
APA StyleIslam, S., Bhuiyan, M. Z. H., Thombre, S., & Kaasalainen, S. (2022). Combating Single-Frequency Jamming through a Multi-Frequency, Multi-Constellation Software Receiver: A Case Study for Maritime Navigation in the Gulf of Finland. Sensors, 22(6), 2294. https://doi.org/10.3390/s22062294