
Multi-GNSS Precise Point Positioning with UWB Tightly Coupled Integration



Abstract
:1. Introduction
2. Methods and Models
2.1. GNSS Positioning System
2.2. UWB Positioning Method
2.3. GNSS/UWB Integration Method
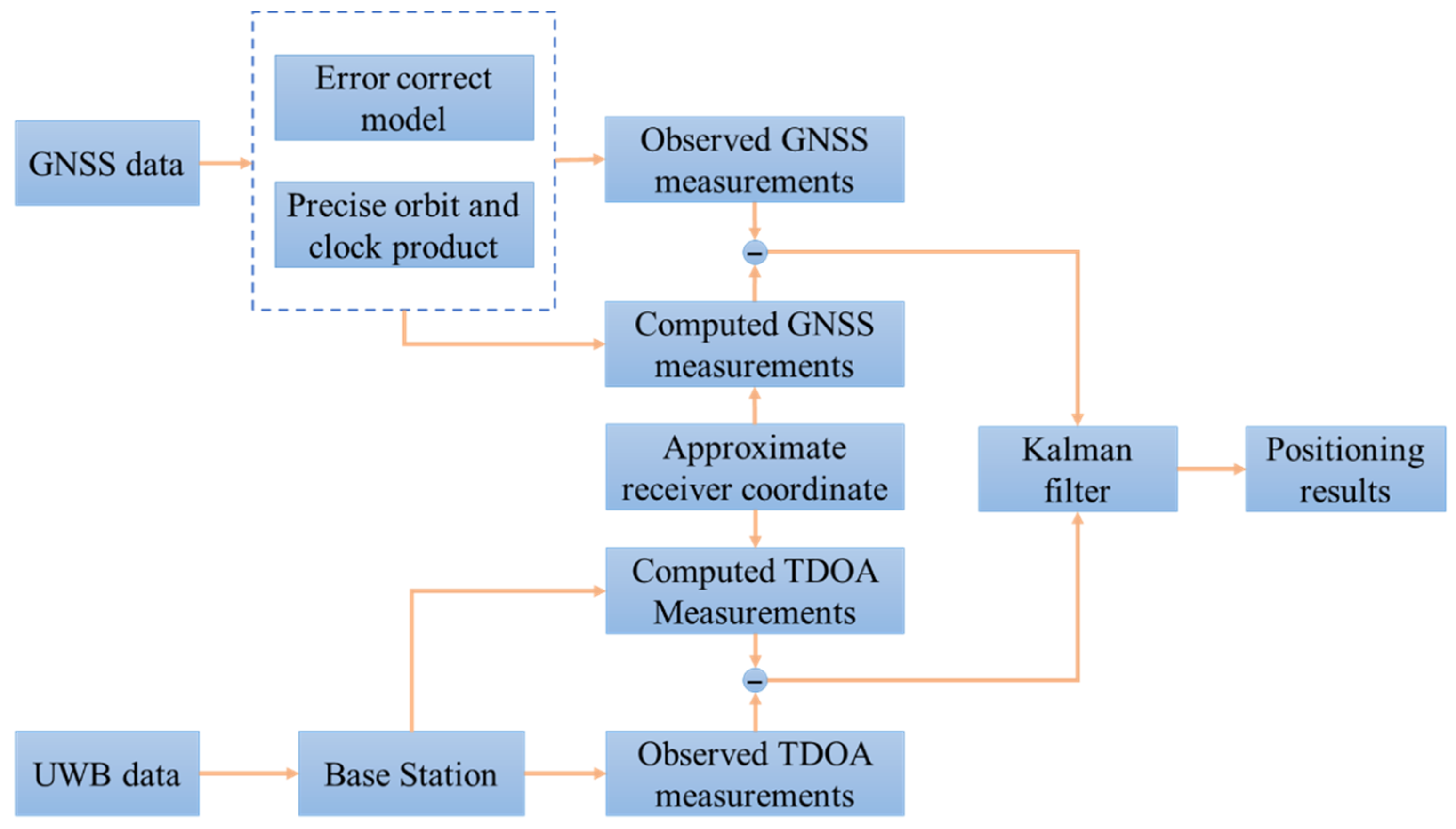
2.3.1. GNSS/UWB Integration Model Based on EKF
2.3.2. Implementation of GNSS/UWB Algorithm
3. Experiments and Results
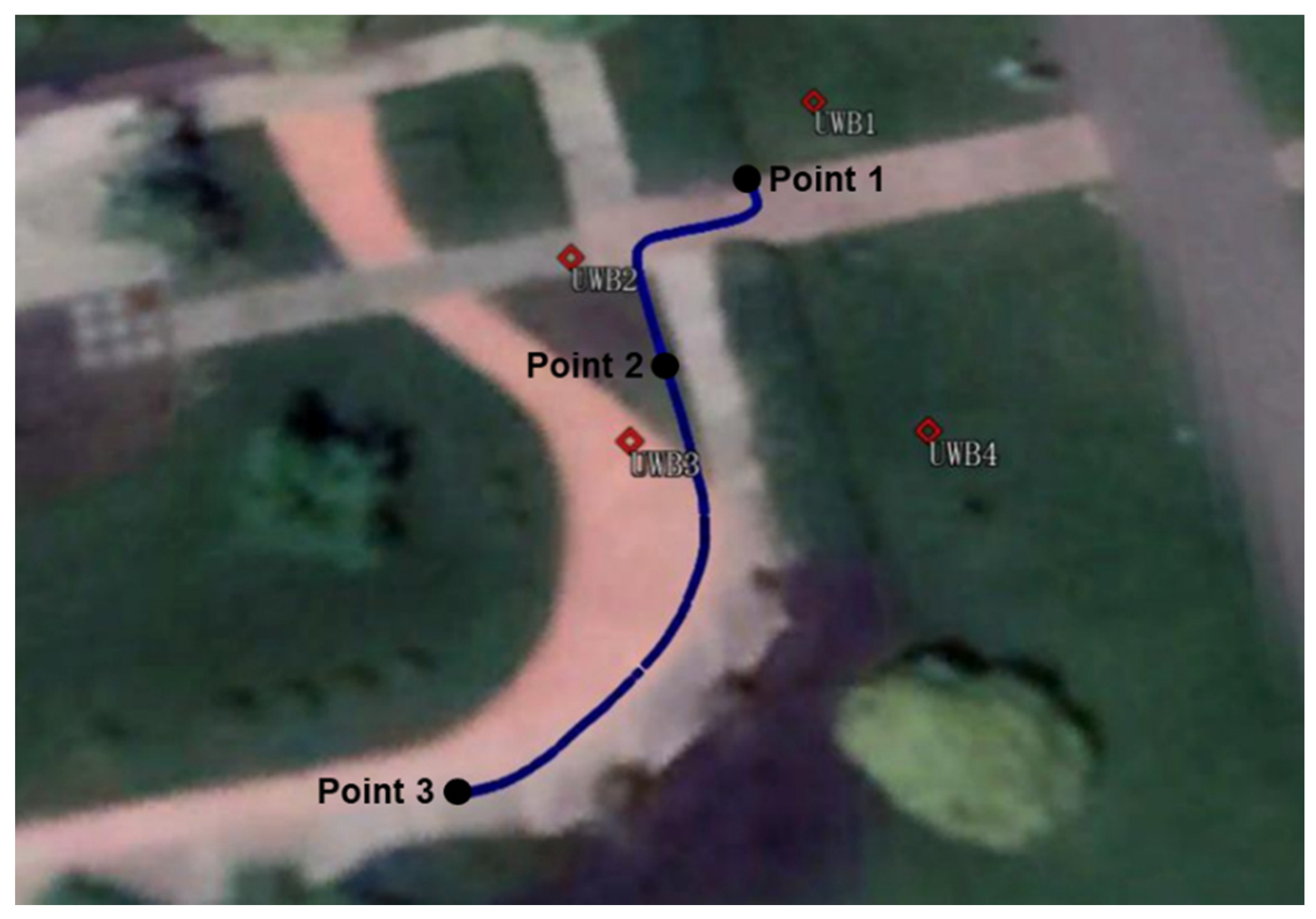
3.1. Experimental Description
- To achieve convergence to the decimeter or centimeter level before the dynamic scenario, the trolley is stationary at Point 1 for about 1.5 h, when only GNSS signals are available;
- The trolley moves from Point 1 to Point 2, simulating an indoor scene where the UWB signals are available and GNSS signals are unavailable;
- The trolley is still static at Point 2 for about one hour, when the signals are both available, and the GNSS signals are interrupted once;
- Finally, the trolley moves from Point 2 to Point 3, when the UWB signals are unavailable and the GNSS signals are available.
3.2. Positioning Accuracy
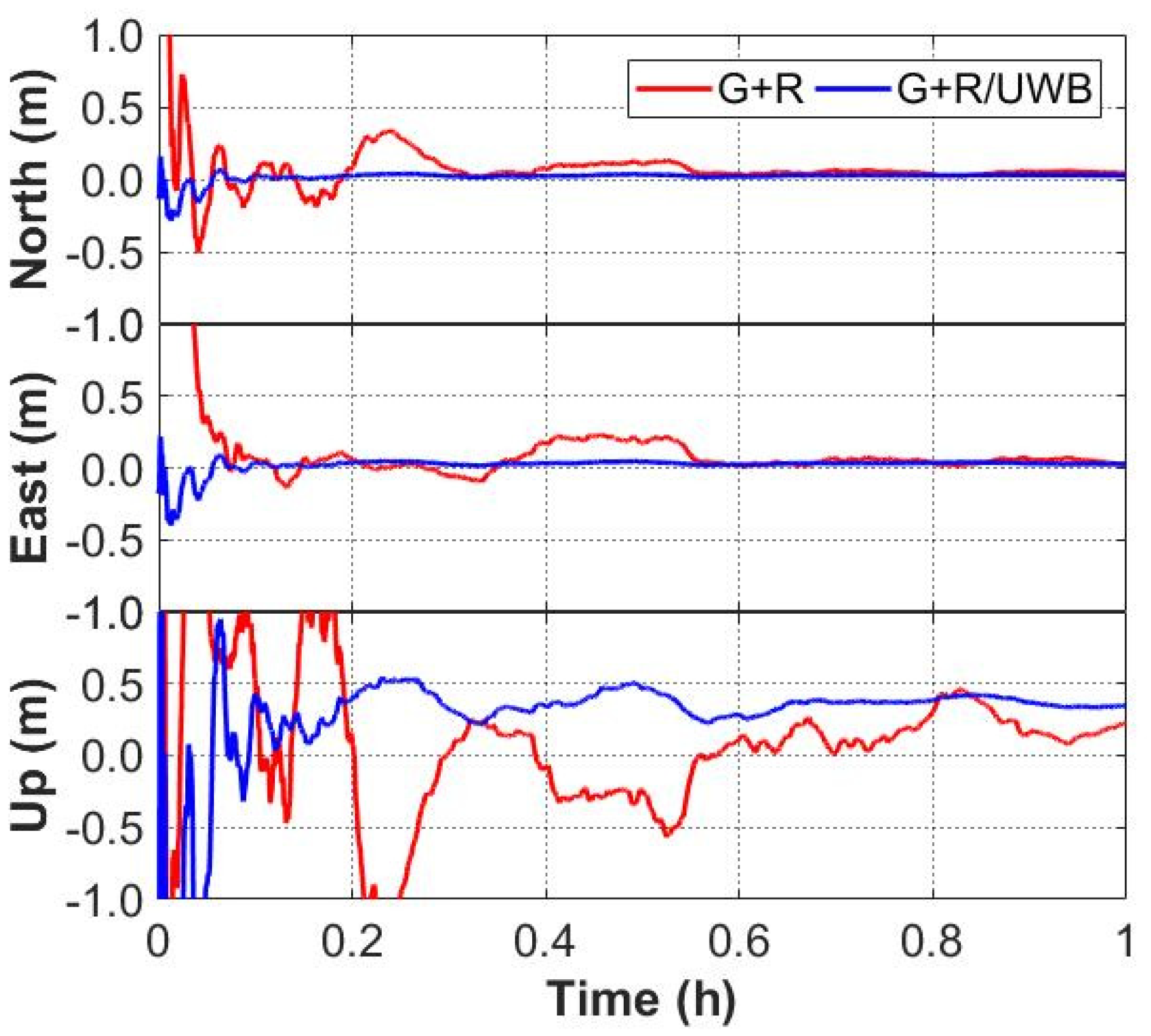
3.2.1. Static Results with an Open-Sky Condition
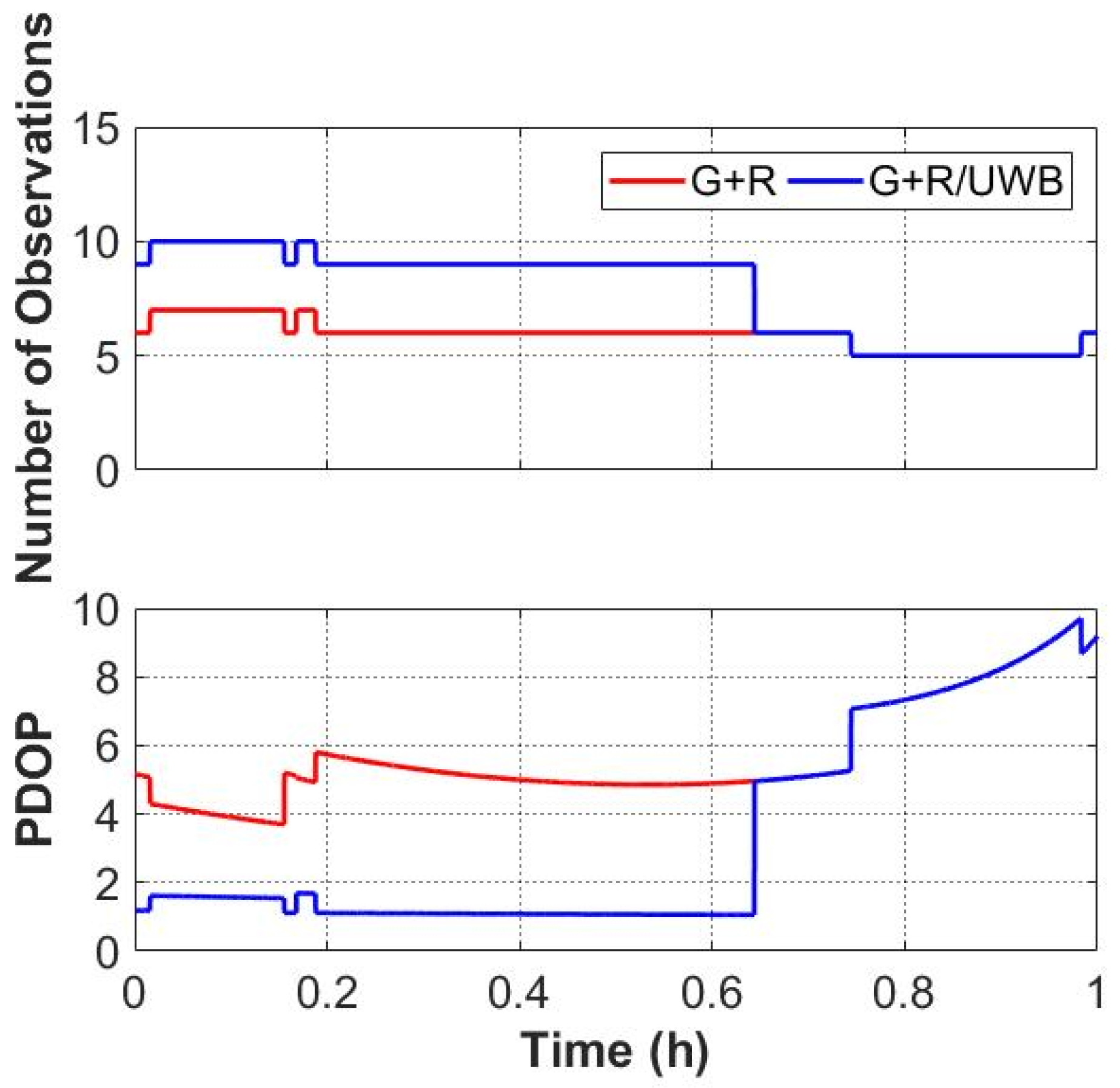
3.2.2. Static Results with a Simulation of Complex Environments
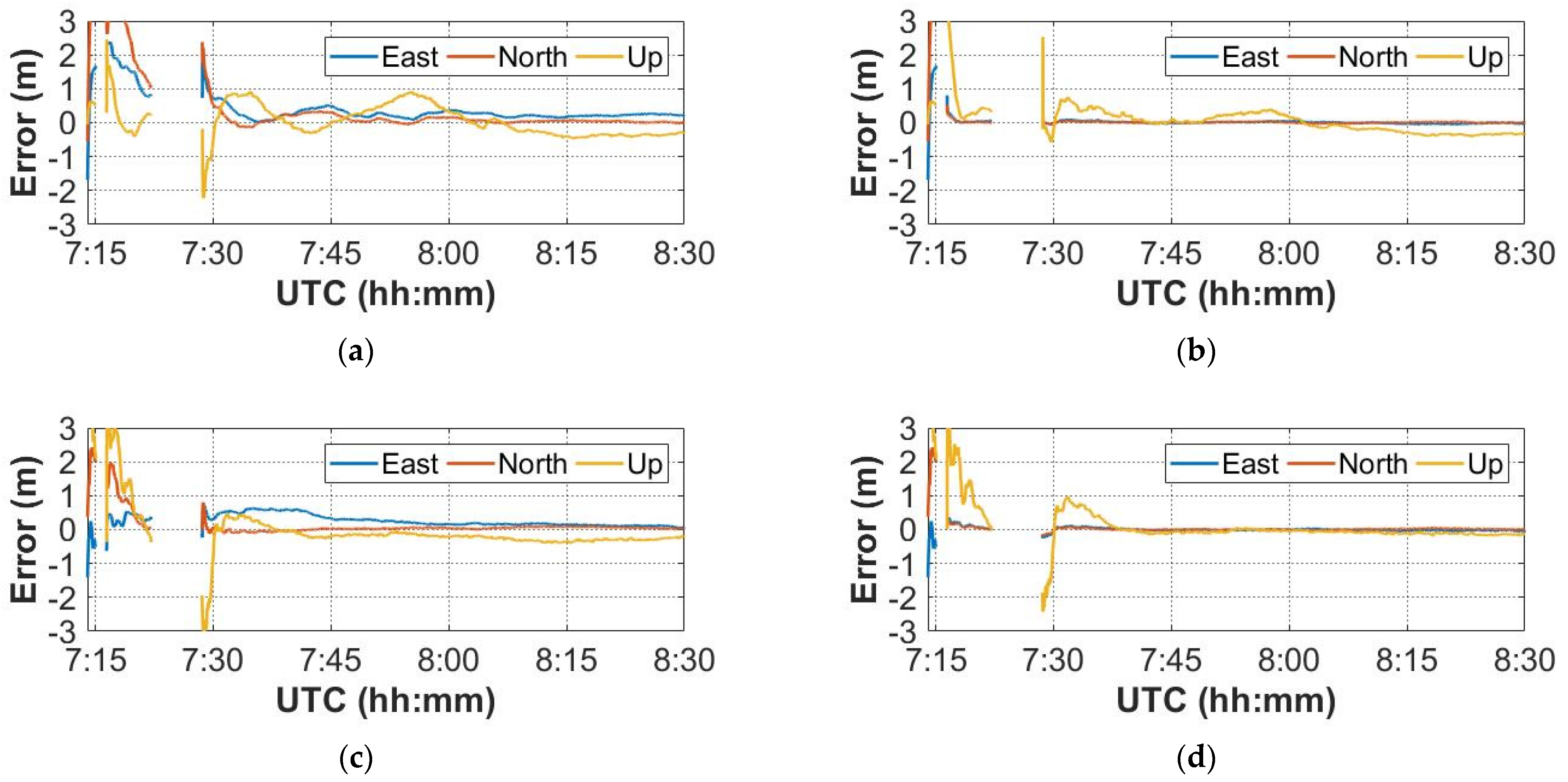
3.3. Convergence Performance
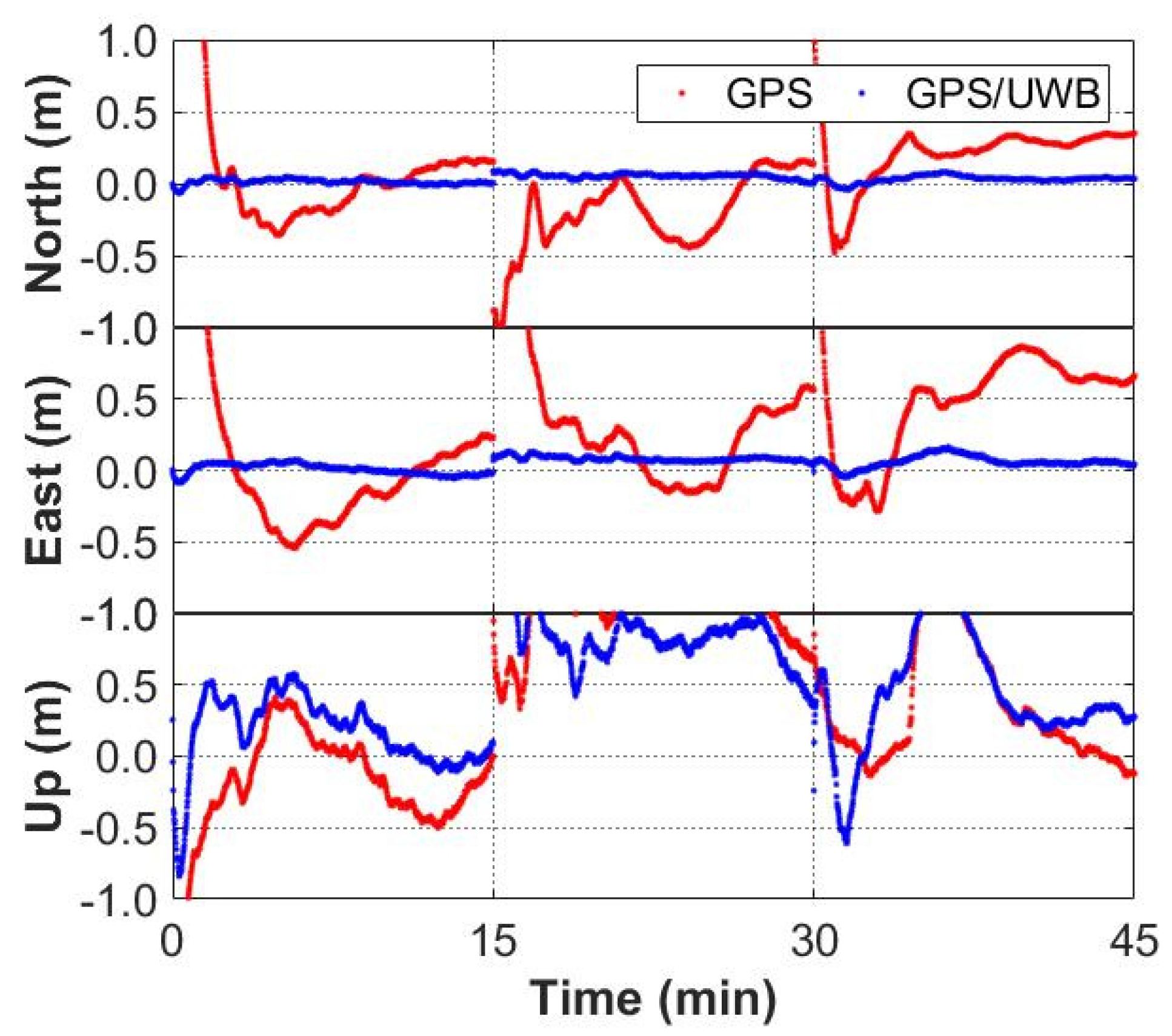
3.4. Positioning Performance during GNSS Outage
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Montenbruck, O.; Steigenberger, P.; Khachikyan, R.; Weber, G.; Langley, R.; Mervart, L.; Hugentobler, U. IGS-MGEX: Preparing the ground for multi-constellation GNSS science. Inside Gnss 2014, 9, 42–49. [Google Scholar]
- Calais, E.; Minster, J.B. GPS detection of ionospheric perturbations following the January 17, 1994, Northridge earthquake. Geophys. Res. Lett. 1995, 22, 1045–1048. [Google Scholar] [CrossRef]
- Larson, K.M.; Bodin, P.; Gomberg, J. Using 1-Hz GPS data to measure deformations caused by the Denali fault earthquake. Science 2003, 300, 1421–1424. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bender, M.; Dick, G.; Wickert, J.; Ramatschi, M.; Ge, M.; Gendt, G.; Rothacher, M.; Raabe, A.; Tetzlaff, G. Estimates of the information provided by GPS slant data observed in Germany regarding tomographic applications. J. Geophys. Res. Atmos. 2009, 114. [Google Scholar] [CrossRef] [Green Version]
- Moses, M.; Dodo, J.D.; Ojigi, L.M.; Lawal, K. Regional TEC modelling over Africa using deep structured supervised neural network. Geod. Geodyn. 2020, 11, 367–375. [Google Scholar] [CrossRef]
- Jin, S.; Zhang, L.; Tapley, B. The understanding of length-of-day variations from satellite gravity and laser ranging measurements. Geophys. J. Int. 2011, 184, 651–660. [Google Scholar] [CrossRef] [Green Version]
- Di Pietra, V.; Dabove, P.; Piras, M. Loosely coupled GNSS and UWB with INS integration for indoor/outdoor pedestrian navigation. Sensors 2020, 20, 6292. [Google Scholar] [CrossRef]
- Alarifi, A.; Al-Salman, A.; Alsaleh, M.; Alnafessah, A.; Al-Hadhrami, S.; Al-Ammar, M.A.; Al-Khalifa, H.S. Ultra Wideband Indoor Positioning Technologies: Analysis and Recent Advances. Sensors 2016, 16, 707. [Google Scholar] [CrossRef]
- Yang, L.; Giannakis, G.B. Ultra-wideband communications: An idea whose time has come. IEEE Signal Process. Mag. 2004, 21, 26–54. [Google Scholar] [CrossRef]
- Opshaug, G.R.; Enge, P. Integrated GPS and UWB navigation system:(Motivates the necessity of non-interference). In Proceedings of the 2002 IEEE Conference on Ultra Wideband Systems and Technologies (IEEE Cat. No. 02EX580), Baltimore, MD, USA, 21–23 May 2002; pp. 123–127. [Google Scholar]
- Fernandez-Madrigal, J.A.; Cruz-Martin, E.; Gonzalez, J.; Galindo, C.; Blanco, J.L. Application of UWB and GPS technologies for vehicle localization in combined indoor-outdoor environments. In Proceedings of the 2007 9th International Symposium on Signal Processing and Its Applications, Sharjah, United Arab Emirates, 12–15 February 2007; pp. 1–4. [Google Scholar]
- Tanigawa, M.; Hol, J.D.; Dijkstra, F.; Luinge, H.; Slycke, P. Augmentation of low-cost GPS/MEMS INS with UWB positioning system for seamless outdoor/indoor positionng. In Proceedings of the 21st International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS 2008), Savannah, GA, USA, 16–19 September 2008; pp. 1804–1811. [Google Scholar]
- Chiu, D.S.; Macgougan, G.; O’Keefe, K. UWB Assisted GPS RTK in Hostile Environments. In Proceedings of the 2008 National Technical Meeting of The Institute of Navigation, San Diego, CA, USA, 28–30 January 2008; pp. 532–542. [Google Scholar]
- Chiu, D.S.; O’Keefe, K.P. Seamless Outdoor-to-Indoor Pedestrian Navigation using GPS and UWB. In Proceedings of the 21st International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS 2008), Savannah, GA, USA, 16–19 September 2008; pp. 2626–2637. [Google Scholar]
- MacGougan, G.; O’Keefe, K.; Klukas, R. Tightly-coupled GPS/UWB Integration. J. Navig. 2009, 63, 1–22. [Google Scholar] [CrossRef]
- MacGougan, G.; O’Keefe, K.; Klukas, R. Accuracy and reliability of tightly coupled GPS/ultra-wideband positioning for surveying in urban environments. GPS Solut. 2010, 14, 351–364. [Google Scholar] [CrossRef]
- Shen, F.; Cheong, J.W.; Dempster, A.G. An ultra-wide bandwidth-based range/GPS tight integration approach for relative positioning in vehicular ad hoc networks. Meas. Sci. Technol. 2015, 26, 045003. [Google Scholar] [CrossRef]
- Tan, K.M.; Law, C.L. GPS and UWB integration for indoor positioning. In Proceedings of the 2007 6th International Conference on Information, Communications & Signal Processing, Singapore, 10–13 December 2007; pp. 1–5. [Google Scholar]
- Petovello, M.G.; O’Keefe, K.; Chan, B.; Spiller, S.; Pedrosa, C.; Basnayake, C. Demonstration of inter-vehicle UWB ranging to augment DGPS for improved relative positioning. In Proceedings of the 23rd International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS 2010), Portland, OR, USA, 21–24 September 2010; pp. 1198–1209. [Google Scholar]
- Gross, J.N.; Gu, Y.; Dewberry, B. Tightly-coupled GPS/UWB-ranging for relative navigation during formation flight. In Proceedings of the 27th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS+ 2014), Tampa, FL, USA, 8–12 September 2014; pp. 1698–1708. [Google Scholar]
- Rizos, C.; Han, S. Reference station network based RTK systems-concepts and progress. Wuhan Univ. J. Nat. Sci. 2003, 8, 566–574. [Google Scholar] [CrossRef]
- Erol, S.; Alkan, R.M.; Ozulu, İ.M.; İlçi, V. Performance analysis of real-time and post-mission kinematic precise point positioning in marine environments. Geod. Geodyn. 2020, 11, 401–410. [Google Scholar] [CrossRef]
- Zumberge, J.F.; Heflin, M.B.; Jefferson, D.C.; Watkins, M.M.; Webb, F.H. Precise point positioning for the efficient and robust analysis of GPS data from large networks. J. Geophys. Res. Solid Earth 1997, 102, 5005–5017. [Google Scholar] [CrossRef] [Green Version]
- Kouba, J.; Héroux, P. Precise point positioning using IGS orbit and clock products. GPS Solut. 2001, 5, 12–28. [Google Scholar] [CrossRef]
- Li, B.; Shen, Y. Global navigation satellite system ambiguity resolution with constraints from normal equations. J. Surv. Eng. 2010, 136, 63–71. [Google Scholar] [CrossRef] [Green Version]
- Li, X.; Ge, M.; Dai, X.; Ren, X.; Fritsche, M.; Wickert, J.; Schuh, H. Accuracy and reliability of multi-GNSS real-time precise positioning: GPS, GLONASS, BeiDou, and Galileo. J. Geod. 2015, 89, 607–635. [Google Scholar] [CrossRef]
- Cai, C.; Gao, Y. Modeling and assessment of combined GPS/GLONASS precise point positioning. GPS Solut. 2012, 17, 223–236. [Google Scholar] [CrossRef]
- Li, P.; Zhang, X. Integrating GPS and GLONASS to accelerate convergence and initialization times of precise point positioning. GPS Solut. 2013, 18, 461–471. [Google Scholar] [CrossRef]
- Xiong, J.; Han, F. Positioning performance analysis on combined GPS/BDS precise point positioning. Geod. Geodyn. 2020, 11, 78–83. [Google Scholar] [CrossRef]
- Yao, Y.; Yu, C.; Hu, Y. A new method to accelerate PPP convergence time by using a global zenith troposphere delay estimate model. J. Navig. 2014, 67, 899–910. [Google Scholar] [CrossRef] [Green Version]
- Zhou, F.; Dong, D.; Li, W.; Jiang, X.; Wickert, J.; Schuh, H. GAMP: An open-source software of multi-GNSS precise point positioning using undifferenced and uncombined observations. GPS Solut. 2018, 22, 33. [Google Scholar] [CrossRef]
- Su, K.; Jin, S.; Ge, Y. Rapid displacement determination with a stand-alone multi-GNSS receiver: GPS, Beidou, GLONASS, and Galileo. GPS Solut. 2019, 23, 54. [Google Scholar] [CrossRef]
- Gabela, J.; Retscher, G.; Goel, S.; Perakis, H.; Masiero, A.; Toth, C.; Gikas, V.; Kealy, A.; Koppányi, Z.; Błaszczak-Bąk, W. Experimental evaluation of a UWB-based cooperative positioning system for pedestrians in GNSS-denied environment. Sensors 2019, 19, 5274. [Google Scholar] [CrossRef] [Green Version]
- Dardari, D.; Conti, A.; Ferner, U.; Giorgetti, A.; Win, M.Z. Ranging with ultrawide bandwidth signals in multipath environments. Proc. IEEE 2009, 97, 404–426. [Google Scholar] [CrossRef]
- Kalman, R.E. A new approach to linear filtering and prediction problems. J. Basic Eng. Mar. 1960, 82, 35–45. [Google Scholar] [CrossRef] [Green Version]
- Wylie, M.P.; Holtzman, J. The non-line of sight problem in mobile location estimation. In Proceedings of the ICUPC-5th International Conference on Universal Personal Communications, Cambridge, MA, USA, 2 October 1996; pp. 827–831. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Items | GPS | GPS + GLONASS | ||||
|---|---|---|---|---|---|---|
| North | East | Up | North | East | Up | |
| GNSS-only (cm) | 6.94 | 7.65 | 11.22 | 4.01 | 2.95 | 8.40 |
| GNSS/UWB (cm) | 2.48 | 1.67 | 6.02 | 1.29 | 1.27 | 6.17 |
| Improvement (%) | 64.26 | 78.16 | 46.34 | 67.83 | 56.94 | 26.54 |
| Items | GPS + GLONASS | ||
|---|---|---|---|
| North | East | Up | |
| GNSS-only solution (cm) | 6.41 | 10.22 | 65.25 |
| GNSS/UWB solution (cm) | 2.66 | 2.63 | 60.77 |
| Improvement (%) | 58.50 | 74.26 | 6.86 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, Z.; Jin, S.; Su, K.; Tang, X. Multi-GNSS Precise Point Positioning with UWB Tightly Coupled Integration. Sensors 2022, 22, 2232. https://doi.org/10.3390/s22062232
Huang Z, Jin S, Su K, Tang X. Multi-GNSS Precise Point Positioning with UWB Tightly Coupled Integration. Sensors. 2022; 22(6):2232. https://doi.org/10.3390/s22062232
Chicago/Turabian StyleHuang, Zhenchuan, Shuanggen Jin, Ke Su, and Xu Tang. 2022. "Multi-GNSS Precise Point Positioning with UWB Tightly Coupled Integration" Sensors 22, no. 6: 2232. https://doi.org/10.3390/s22062232
APA StyleHuang, Z., Jin, S., Su, K., & Tang, X. (2022). Multi-GNSS Precise Point Positioning with UWB Tightly Coupled Integration. Sensors, 22(6), 2232. https://doi.org/10.3390/s22062232