
Evaluating of IAQ-Index and TVOC Parameter-Based Sensors for Hazardous Gases Detection and Alarming Systems

 ,
,  ,
, 
Abstract
:1. Introduction
2. Materials and Methods
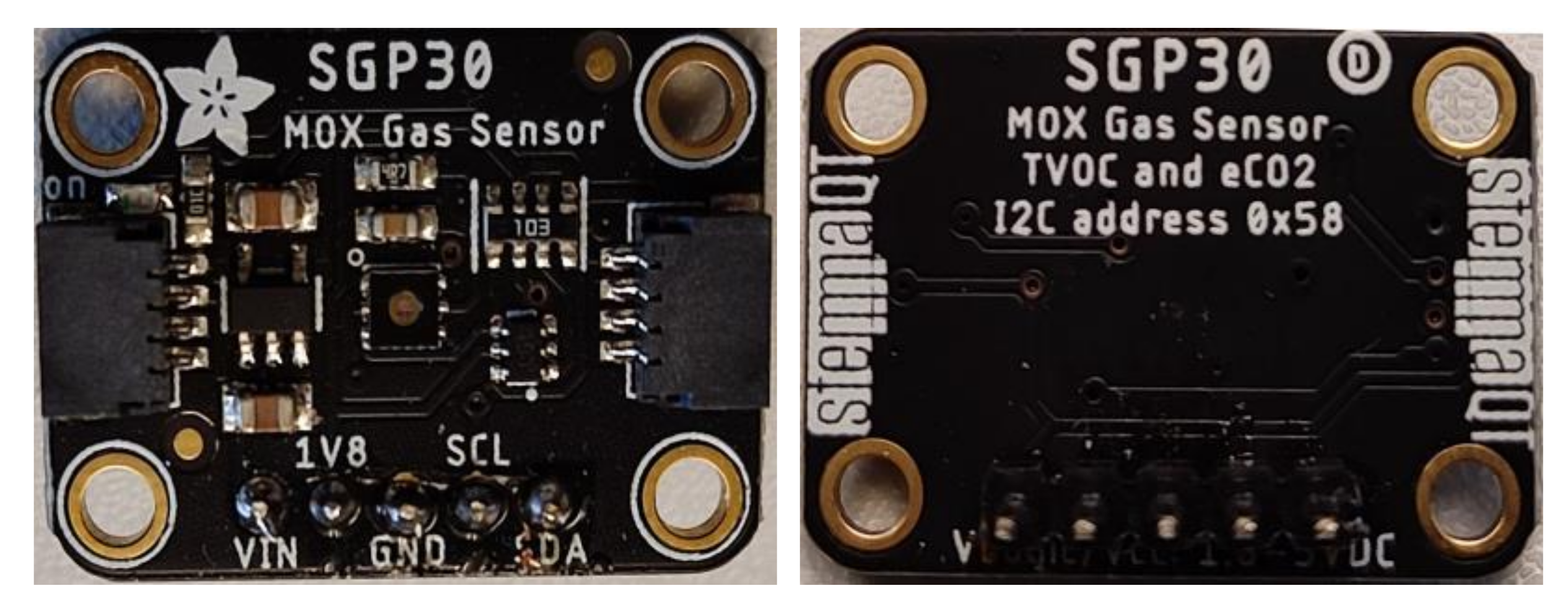
2.1. SGP30 Gas Sensor
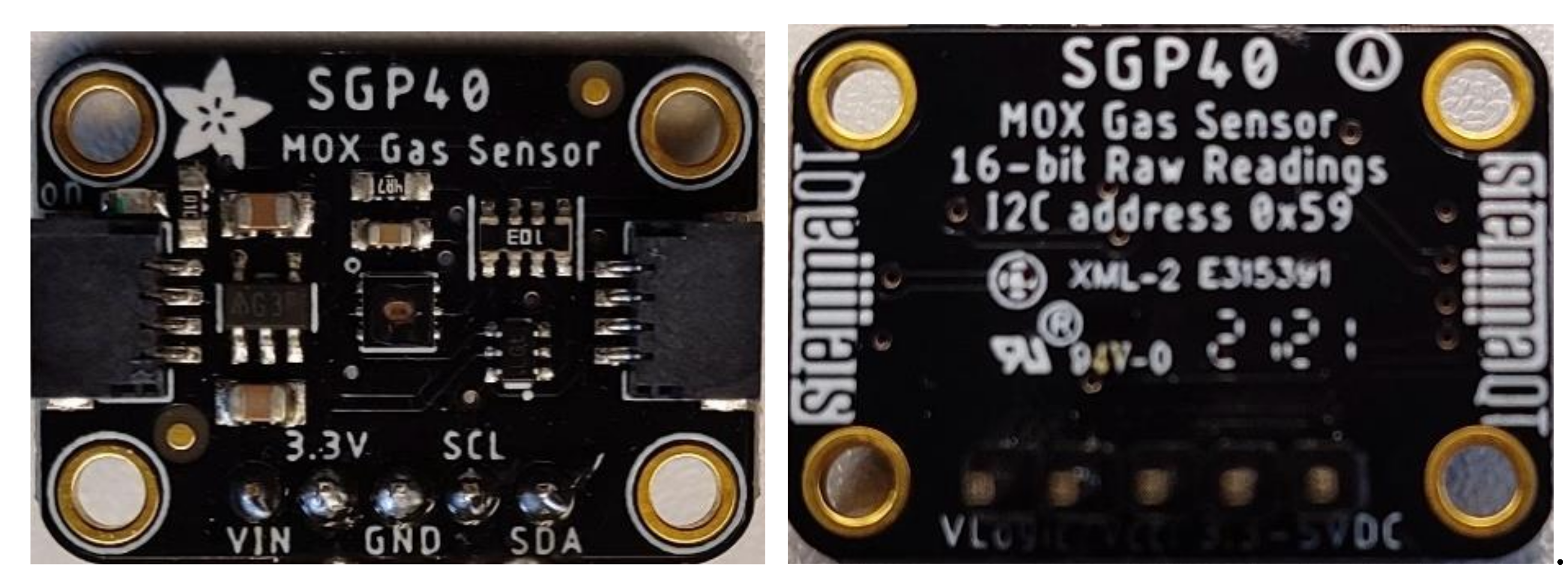
2.2. SGP40 Gas Sensor
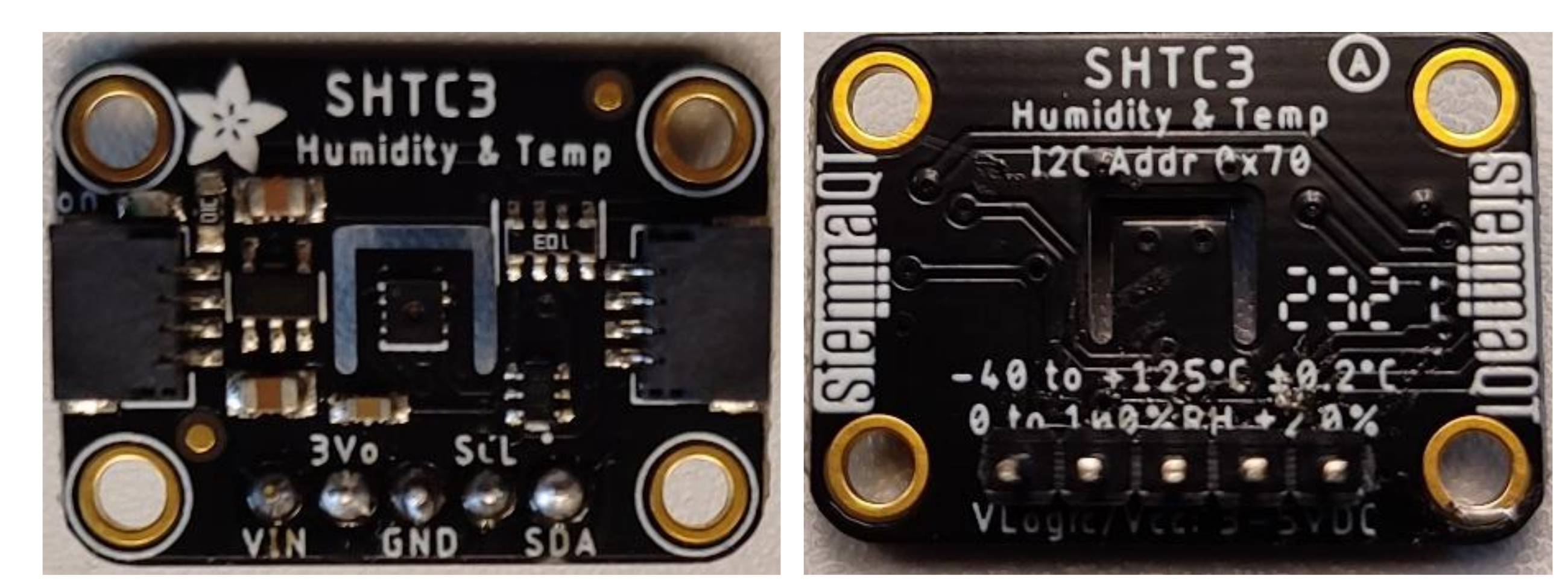
2.3. SHTC3 Environmental Sensor
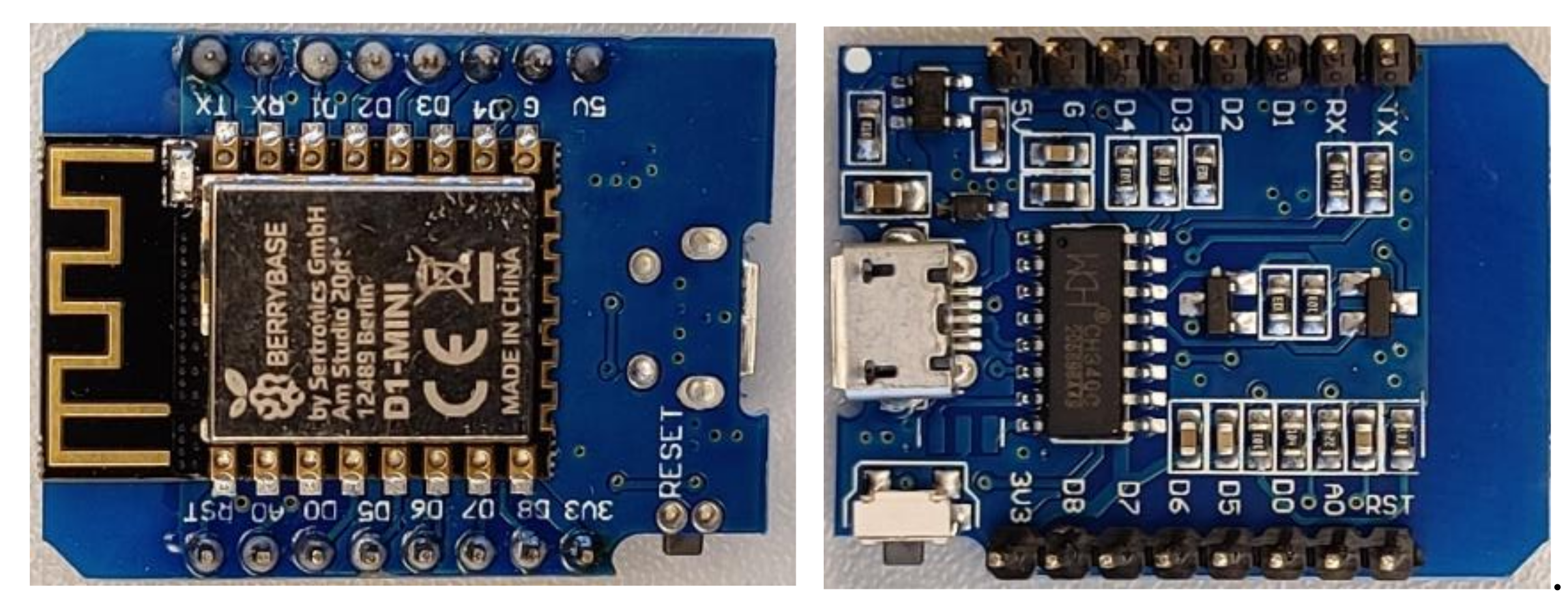
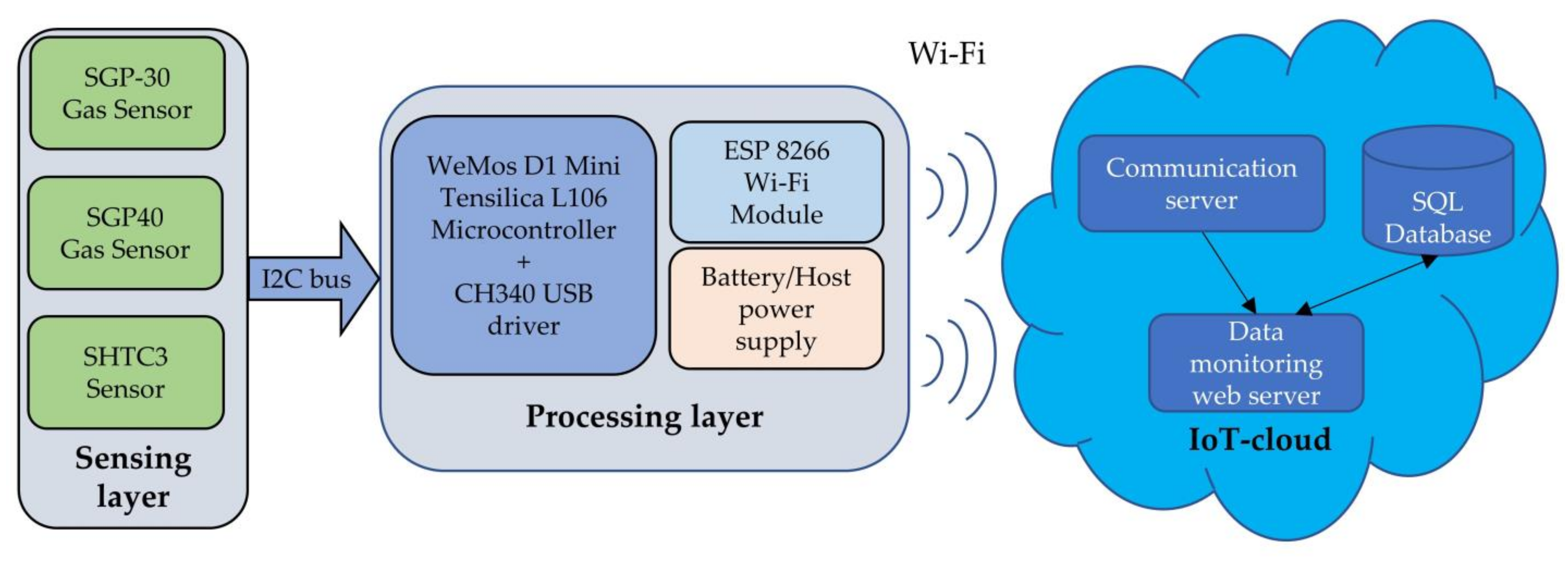
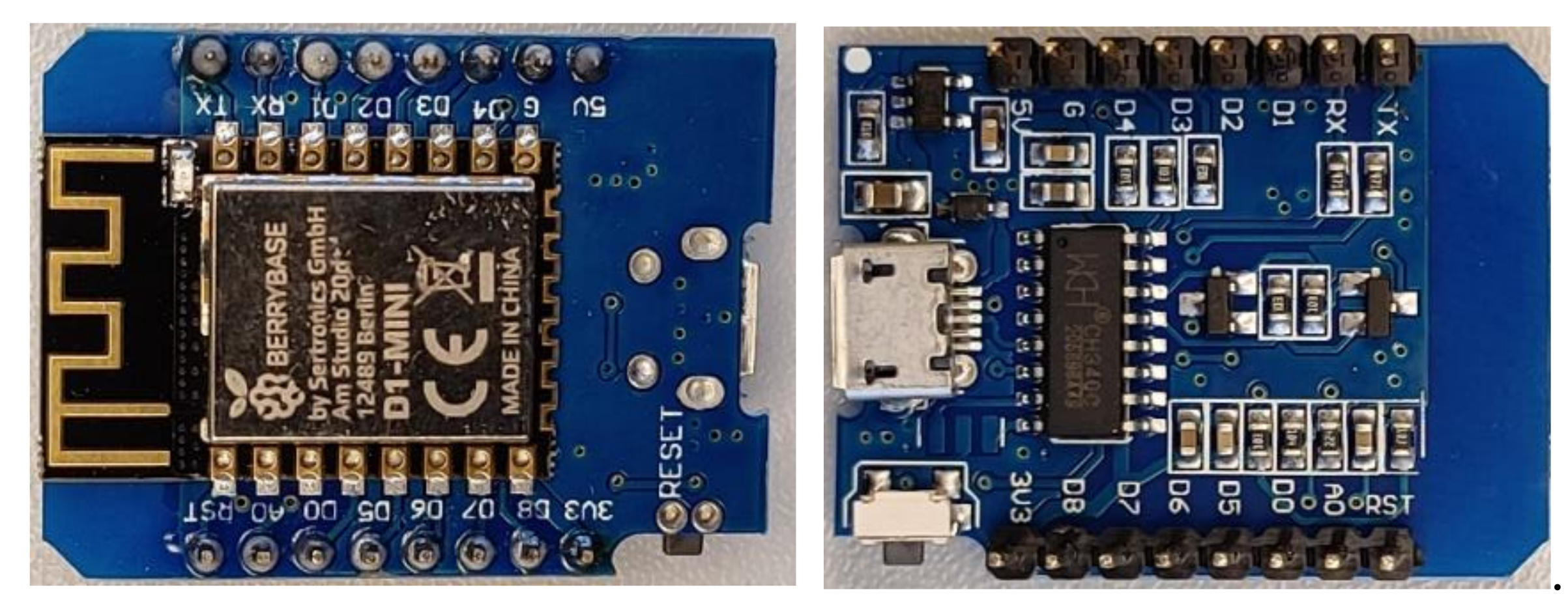
2.4. WeMos D1 Mini Development Board
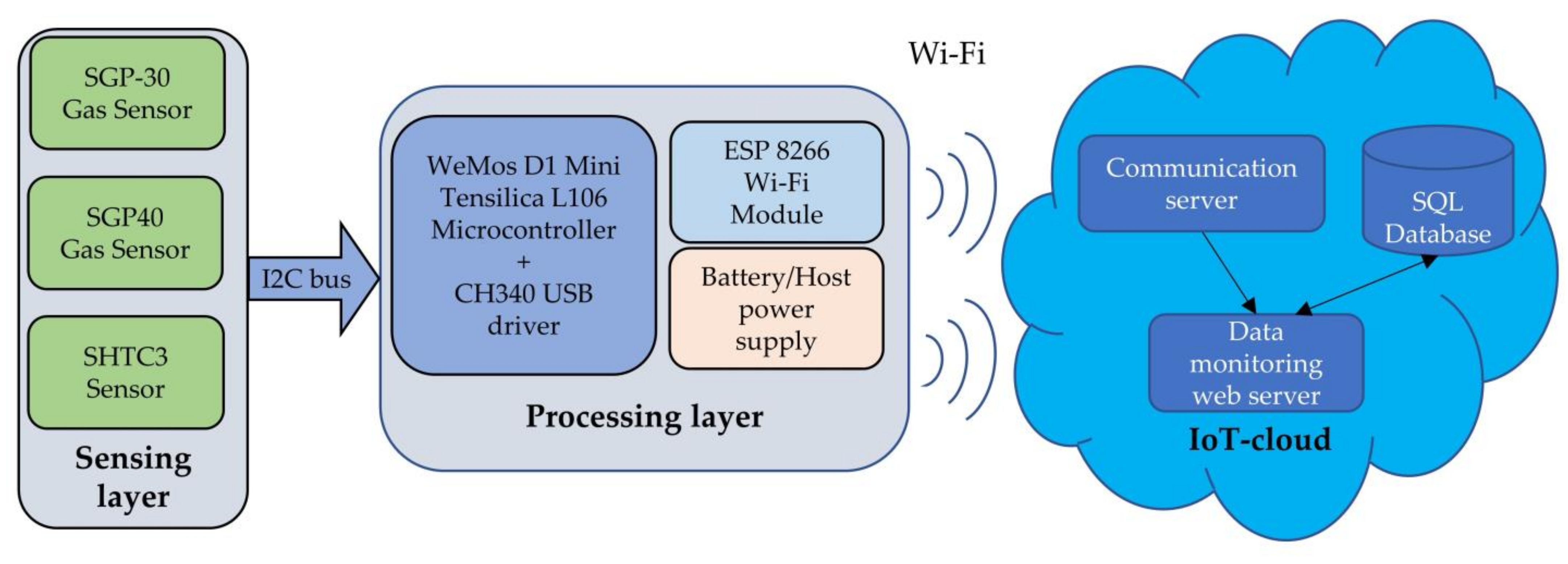
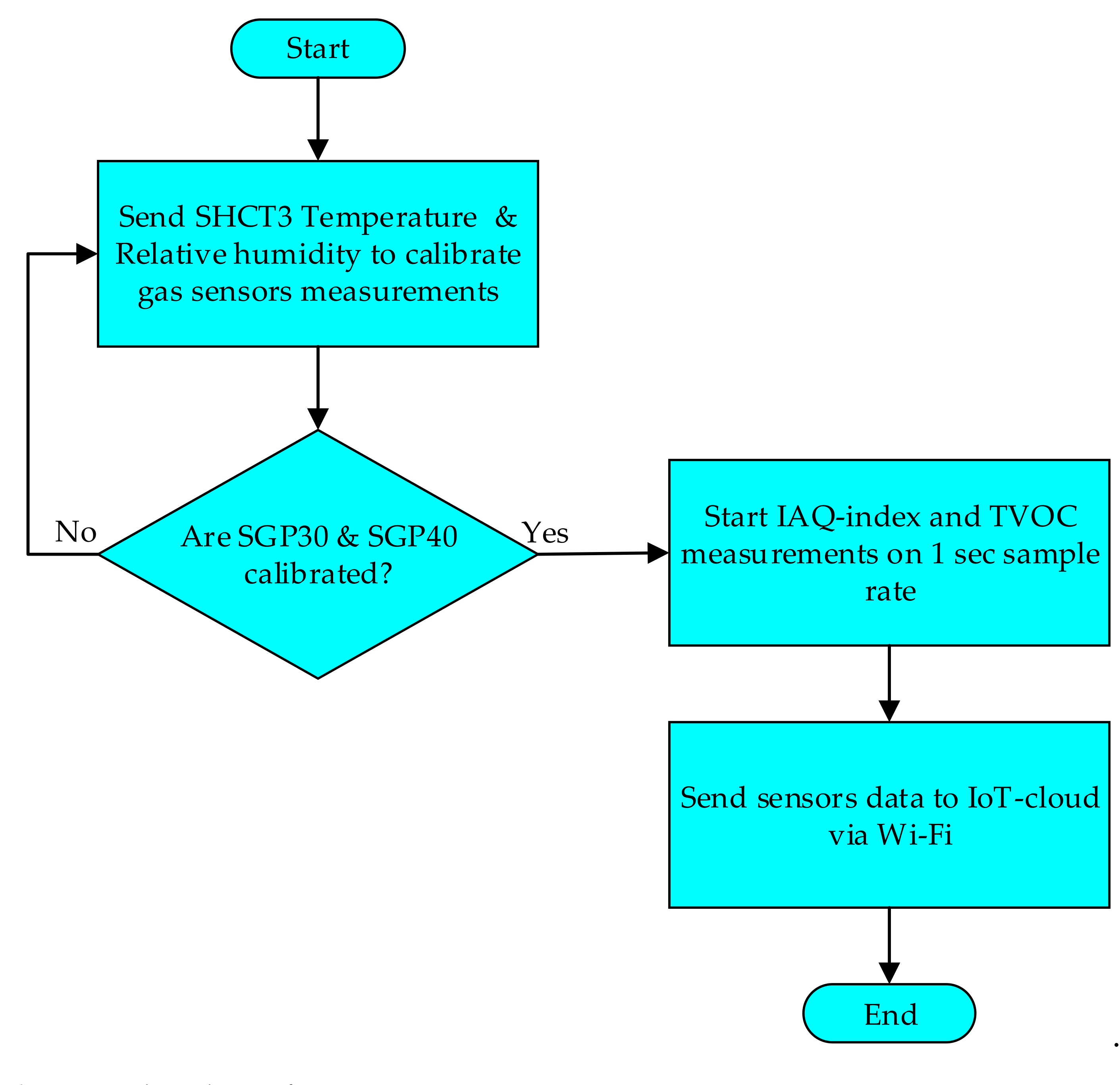
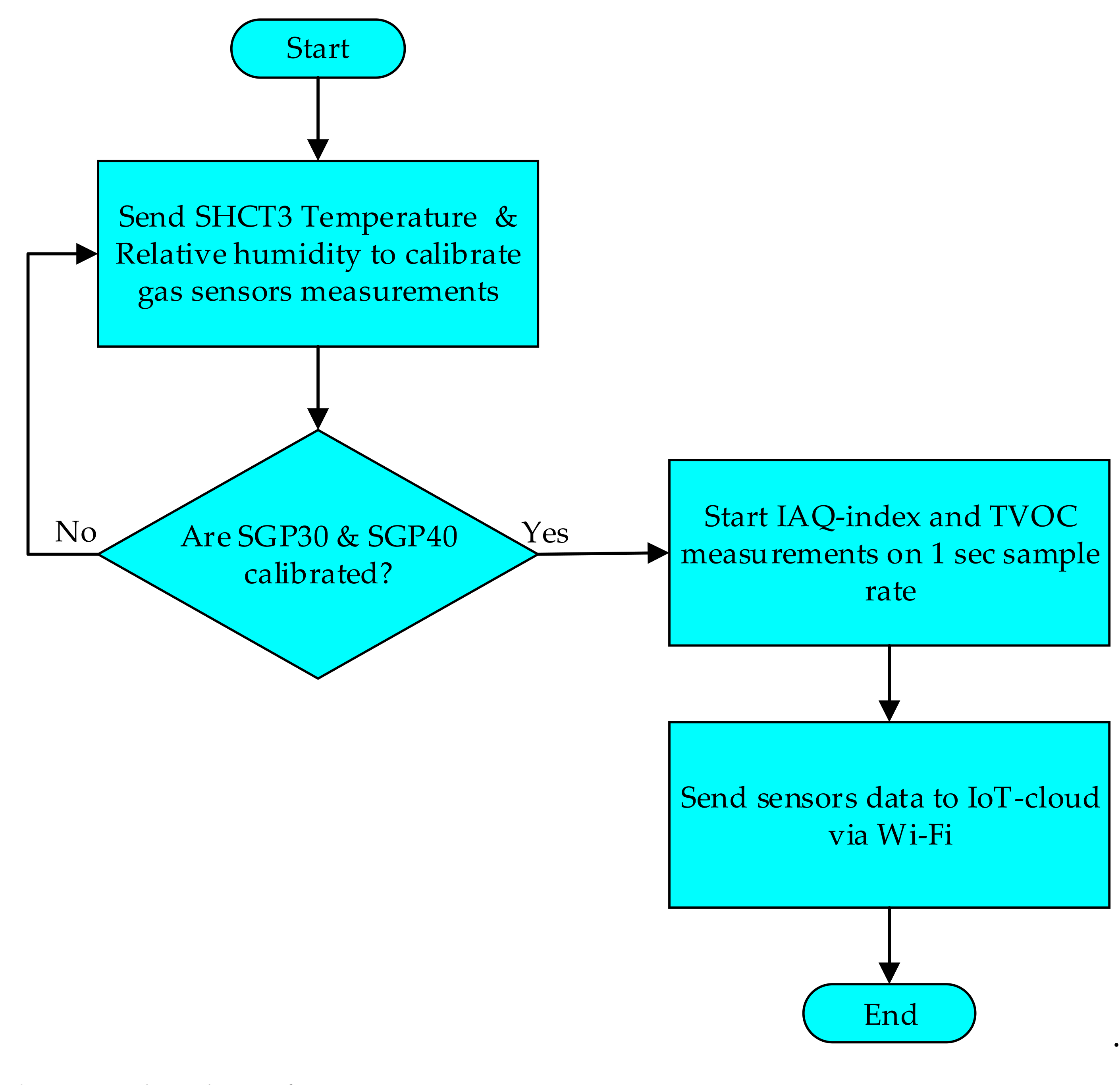
3. Work Description
4. Results
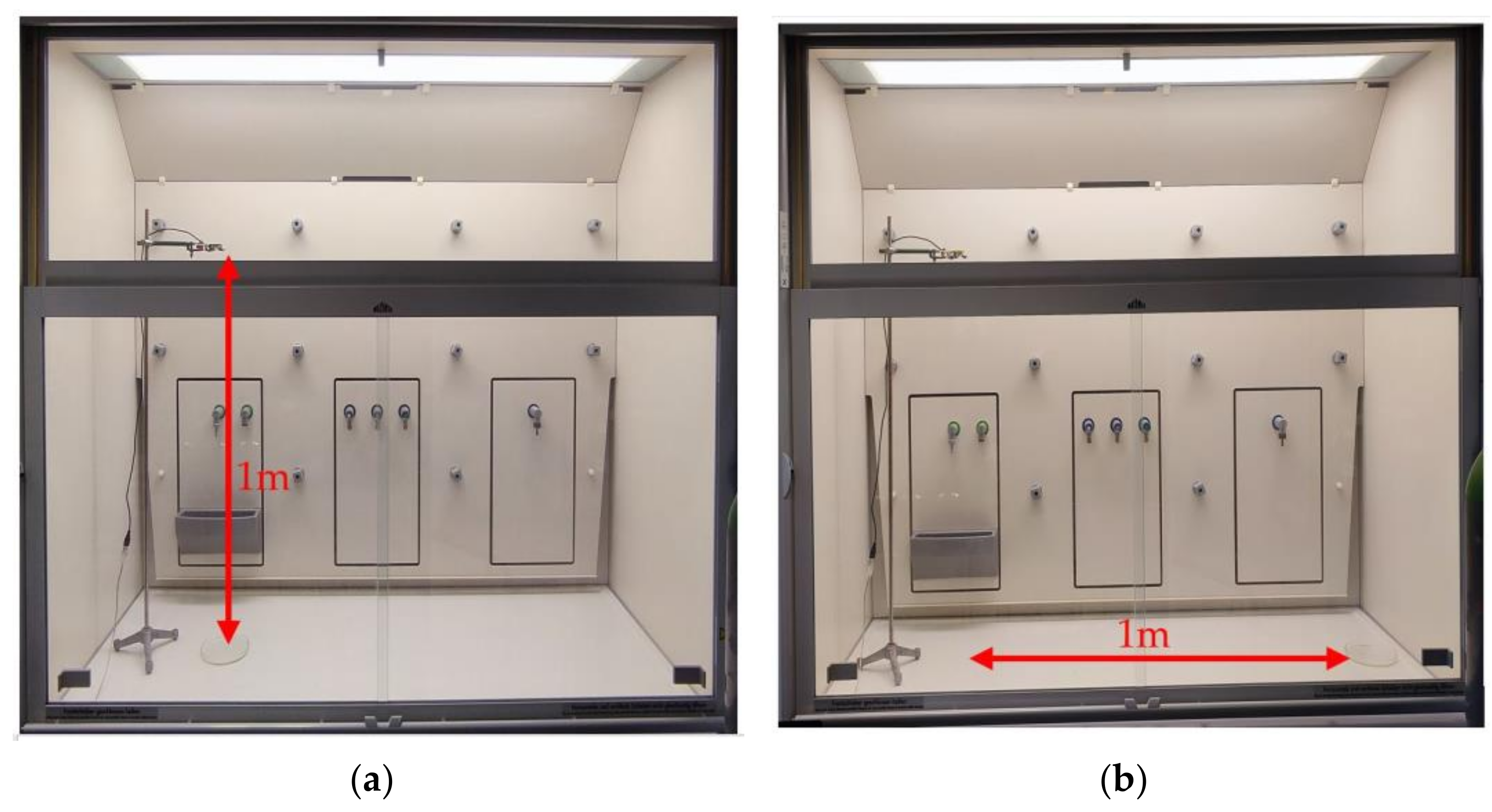
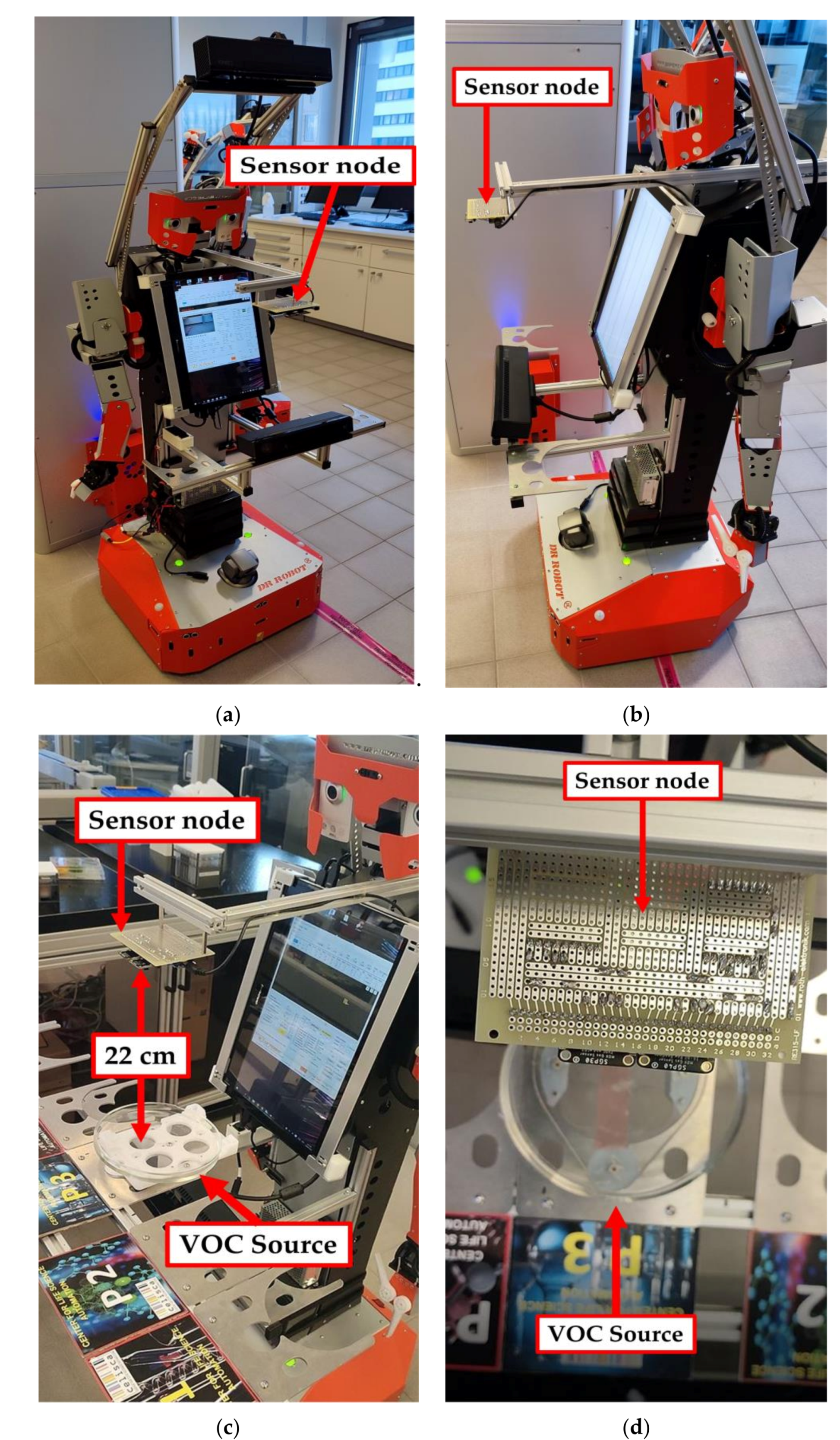
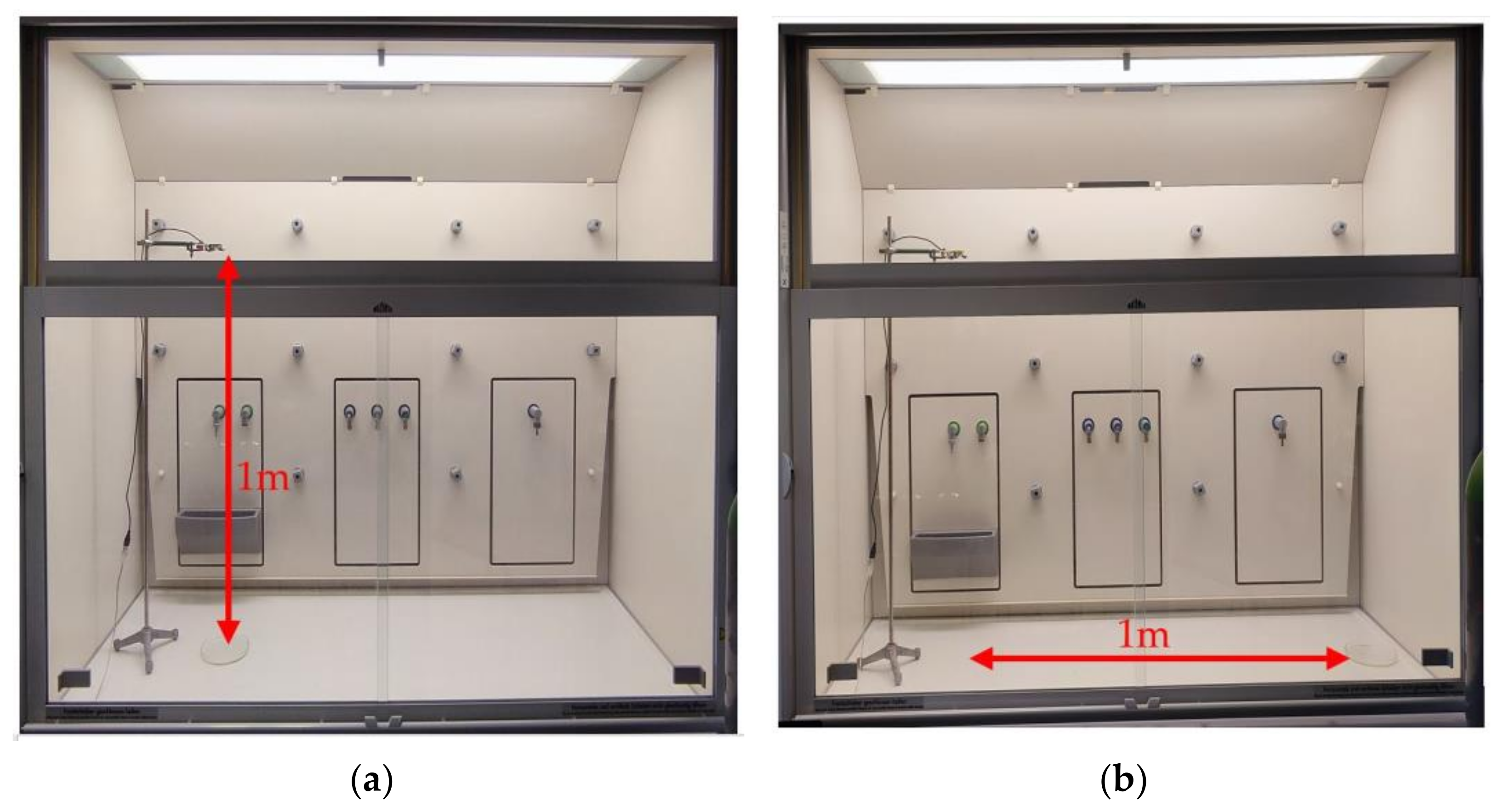
4.1. System Testing in Chemicals Preparation Hood
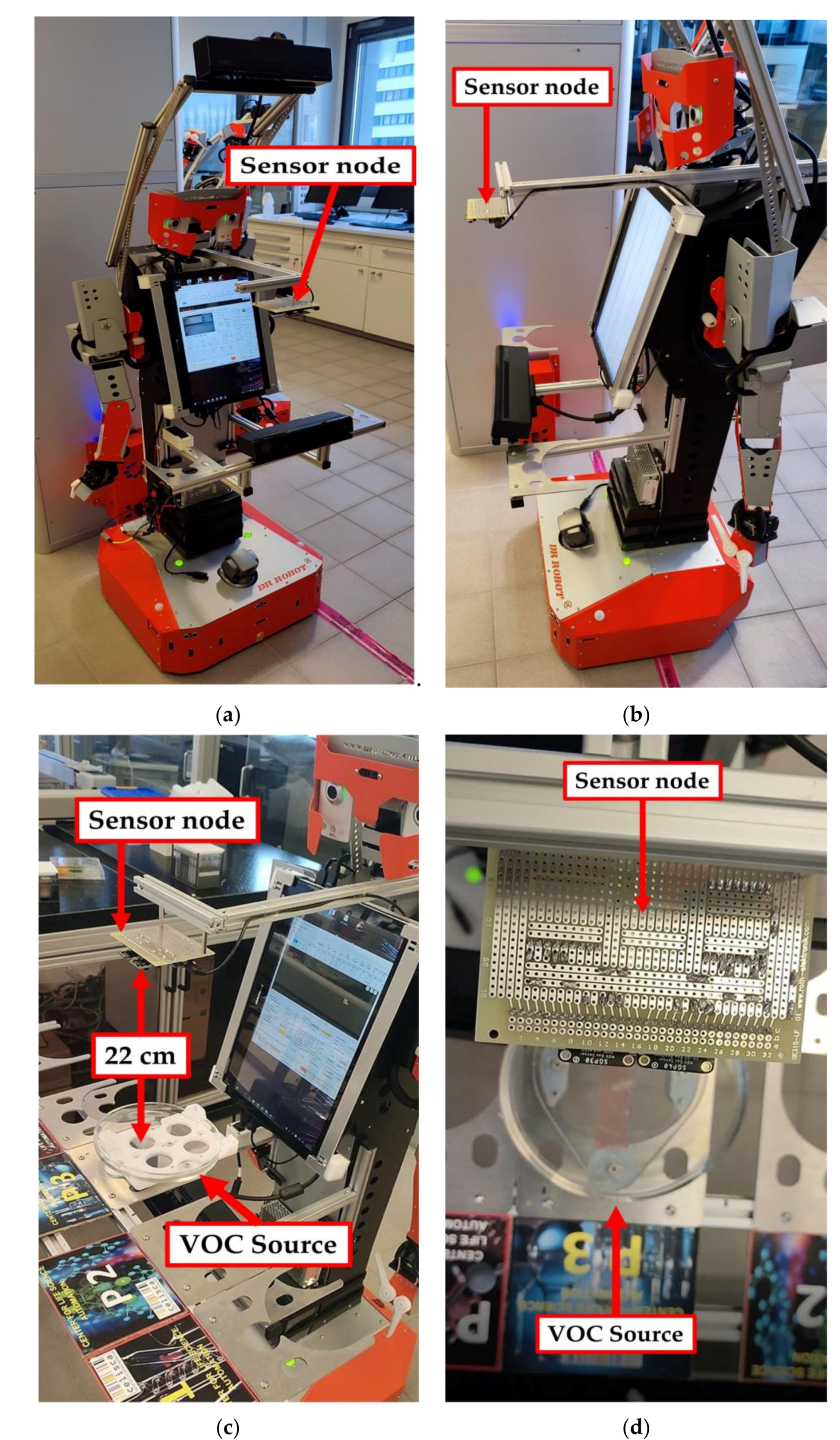
4.2. H20 Tests
5. Discussion
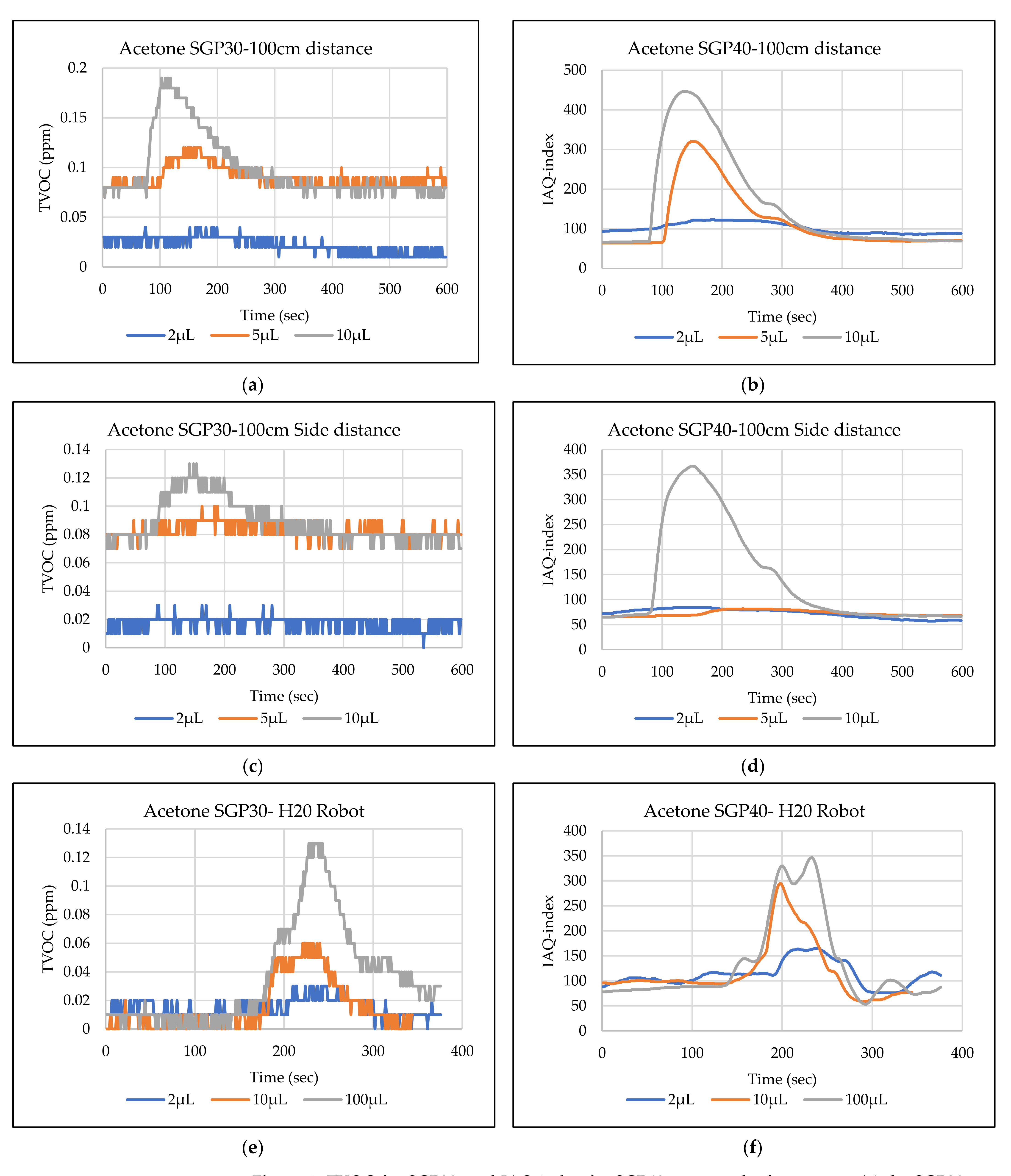
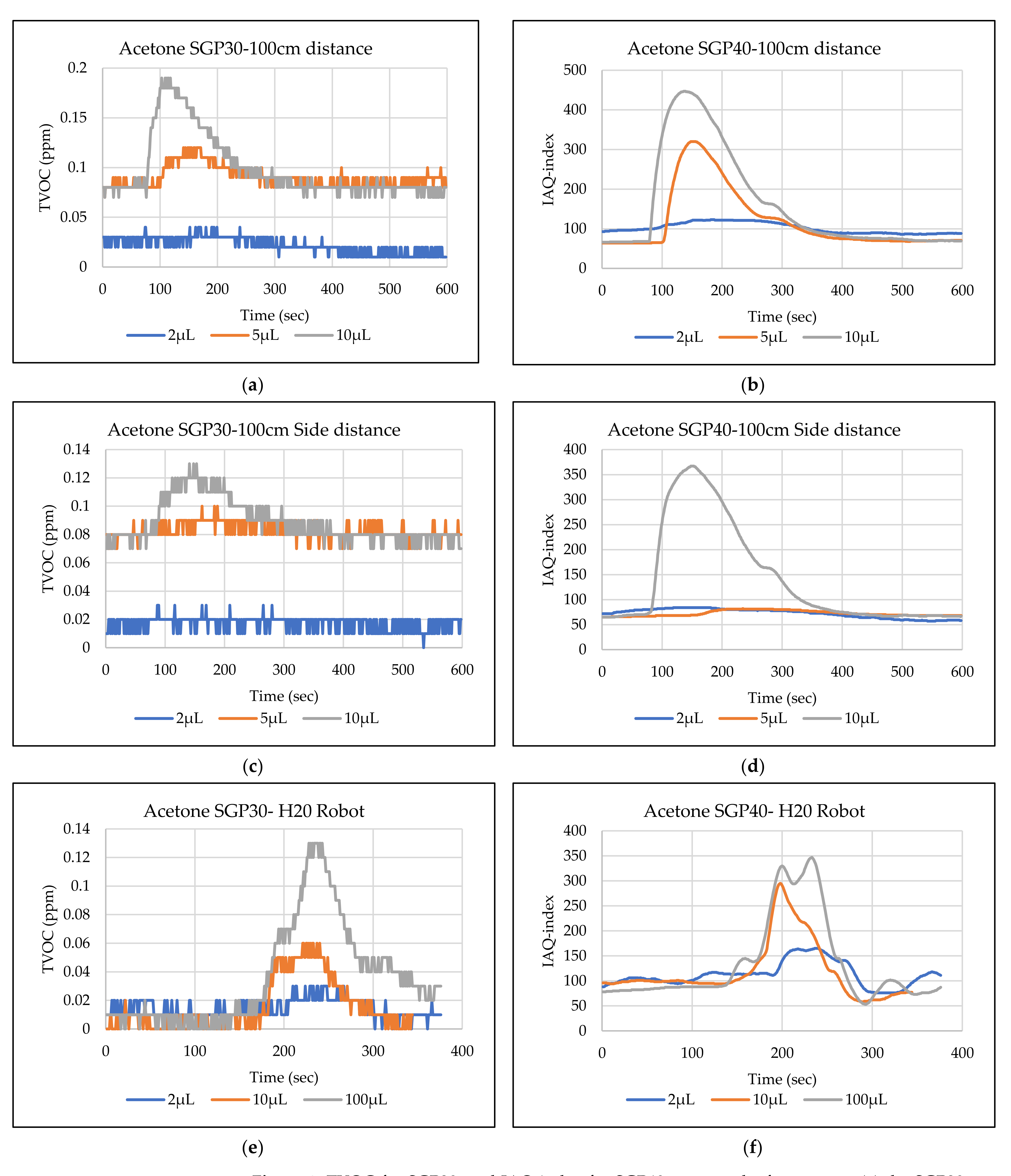
- Acetone: the tests show that the TVOC SGP30 sensor can detect volumes ≥ 10 µL inside the hood for both positions (directly under the sensor and shifted one meter), while the IAQ-index of SGP40 can detect volumes ≥ 5 µL directly under the sensor and ≥10µL for shifted 1 m horizontally. The H20 robot tests show a weak sensor signal of the SGP30 sensor for 2 µL and 10 µL. A sufficient signal that can be used as a threshold for the alarm systems can only be achieved for volumes ≥ 100 µL. The H20 robot tests for SGP40 show better performance and the sensor can clearly react and detect volumes ≥ 10 µL.
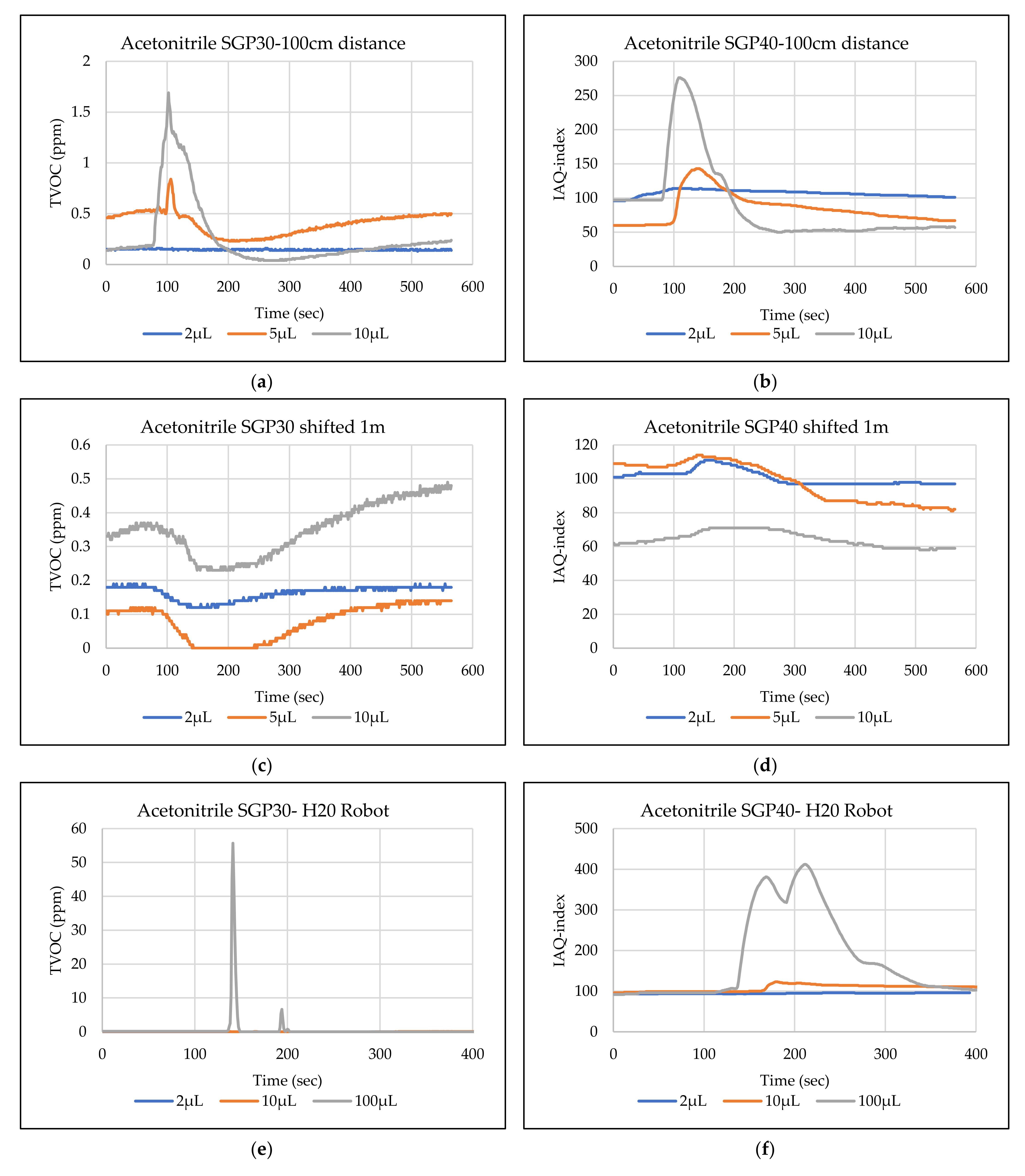
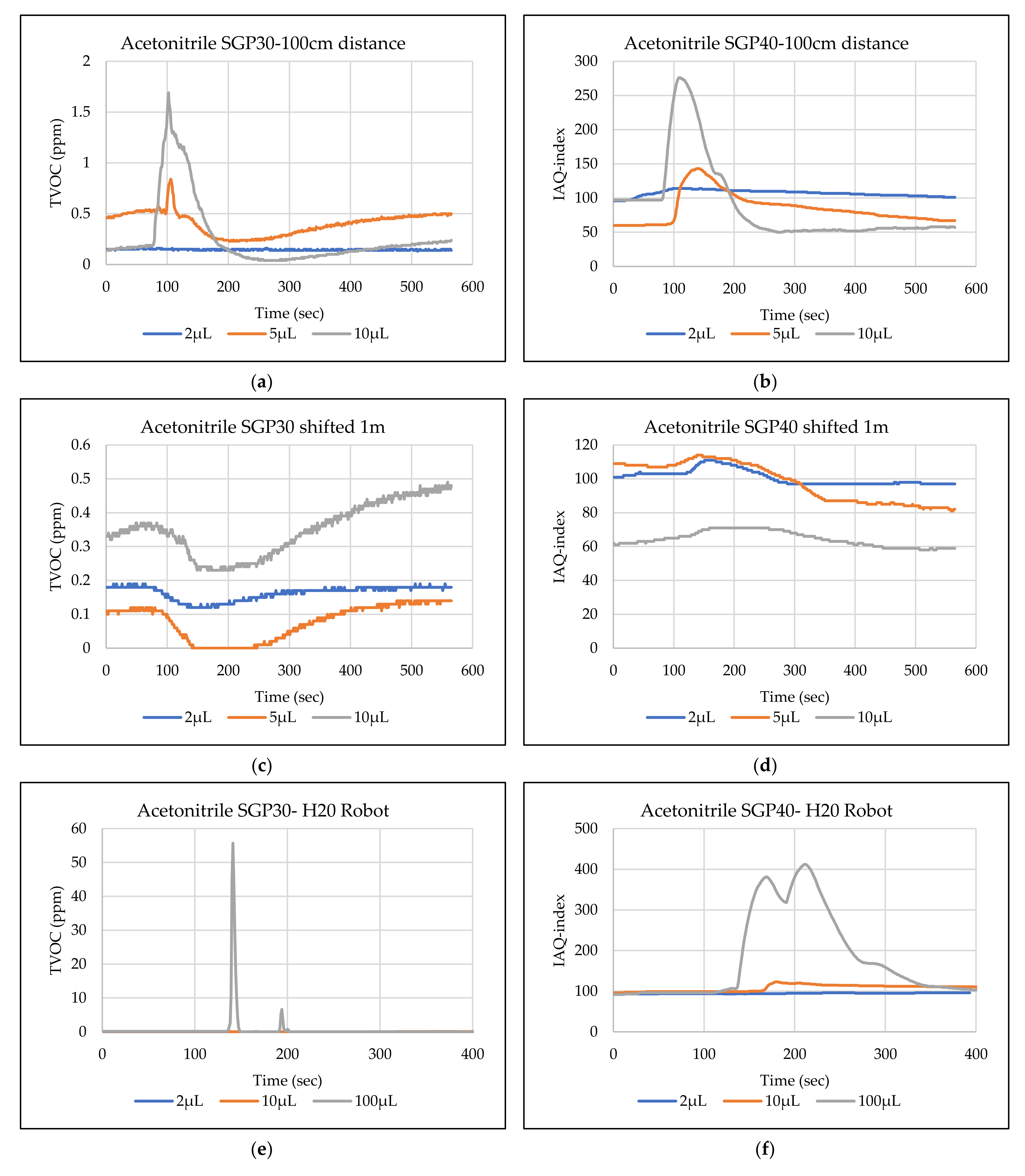
- Acetonitrile: the tests show that the TVOC of the SGP30 sensor can detect volumes ≥ 10 µL inside the hood for the first position, and failed to detect the 2 µL, 5 µL, 10 µL for the second position. The IAQ-index of SGP40 can detect volumes ≥ 5µL directly under the sensor and failed to detect the 2 µL, 5 µL, 10 µL for the second position. The H20 robot tests show that the SGP30 can only detect the volume ≥ 100 µL. The H20 robot tests for SGP40 show better performance and the sensor can clearly react and detect volumes ≥ 10 µL.
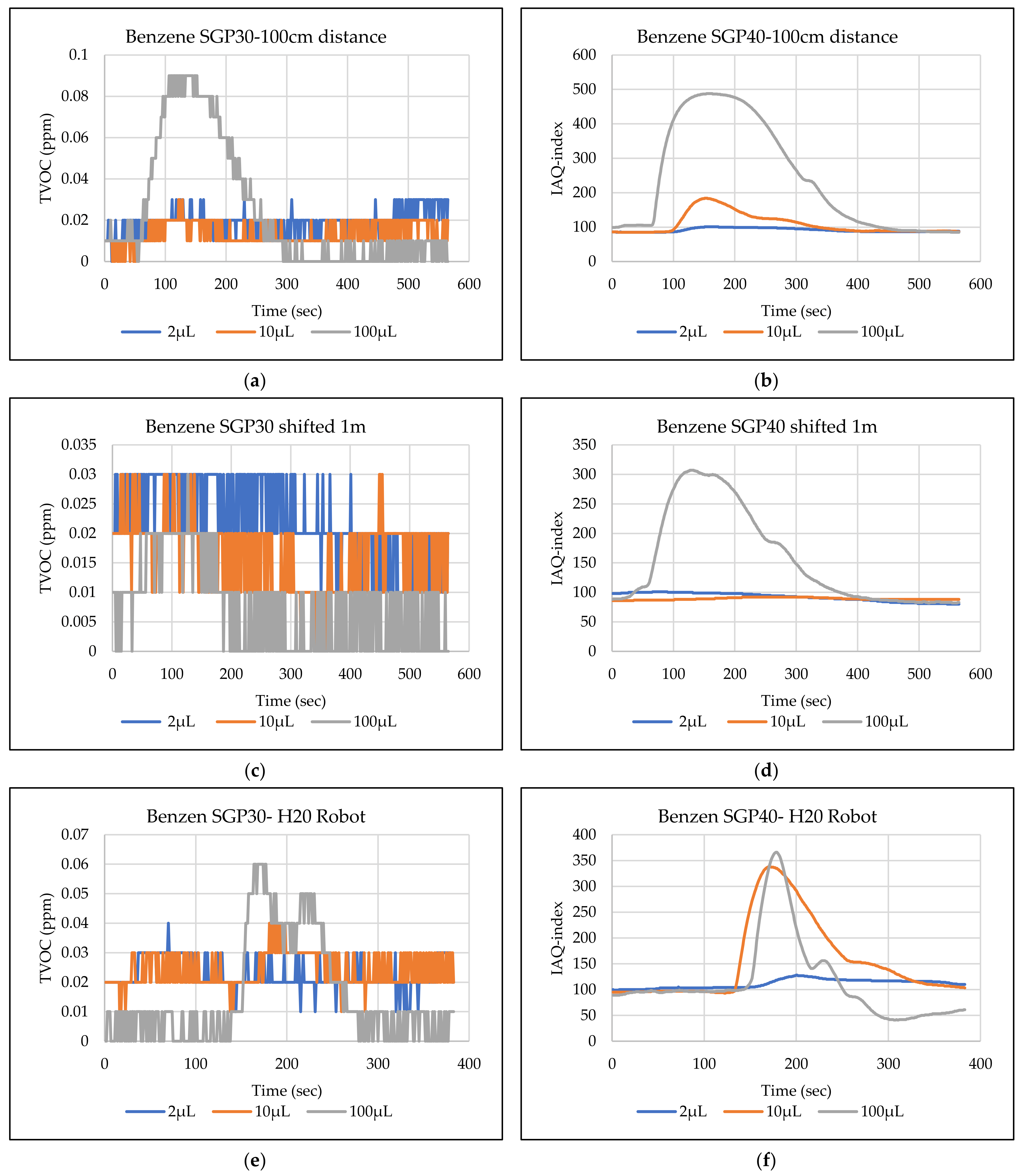
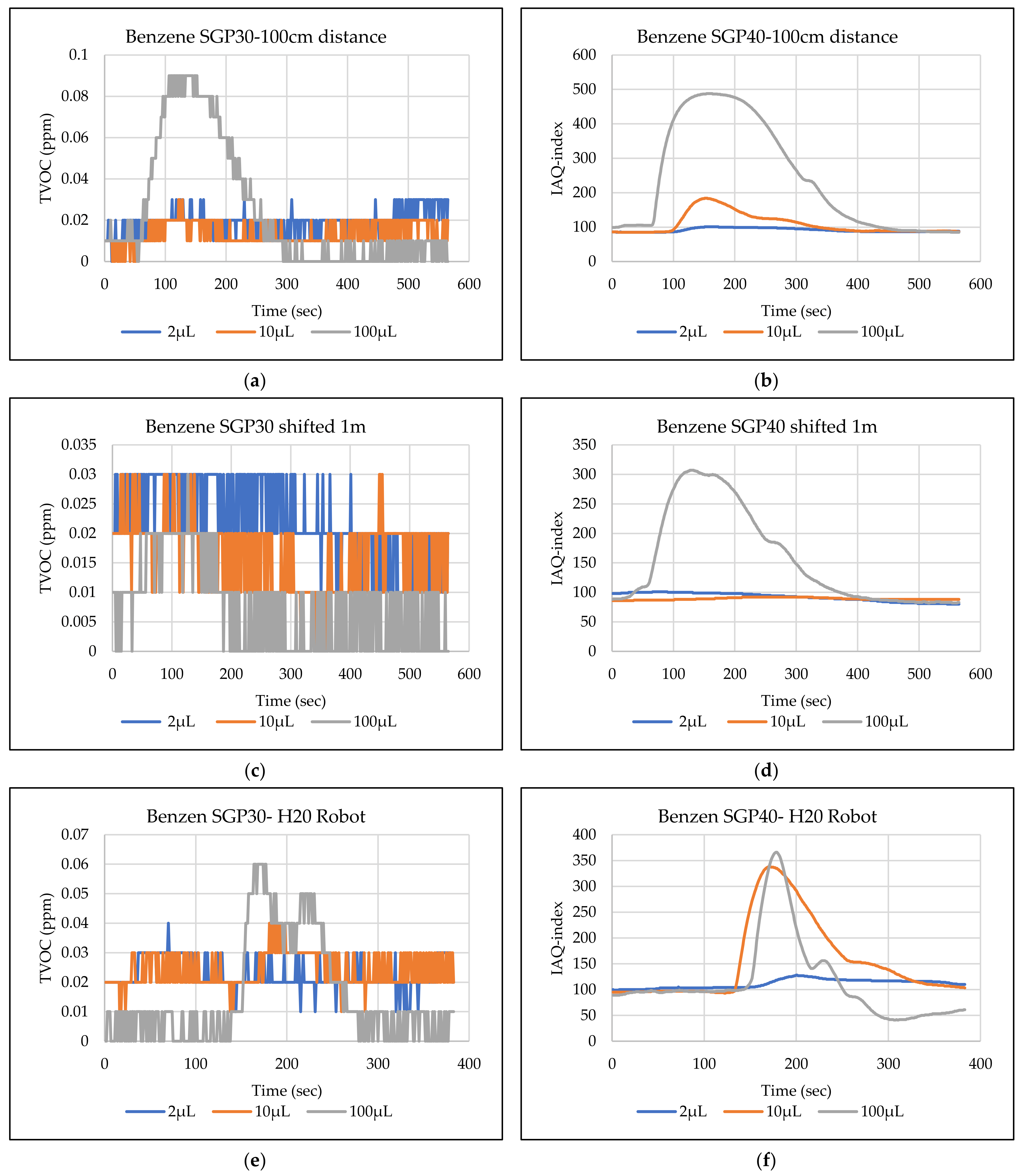
- Benzene: the tests show that the TVOC of the SGP30 sensor can detect volumes ≥ 100 µL inside the hood for the first position but failed for the detection of volumes up to 100 µL for the second position. The IAQ-index of SGP40 can detect volumes ≥ 10 µL directly under the sensor, as well as volumes ≥ 100 µL for the second position. The H20 robot tests show only a weak signal for the SGP30 and reacts weakly for a volume of 100 µL. The H20 robot tests for the SGP40 show better performance; the sensor can clearly react and detect volumes ≥ 10 µL.
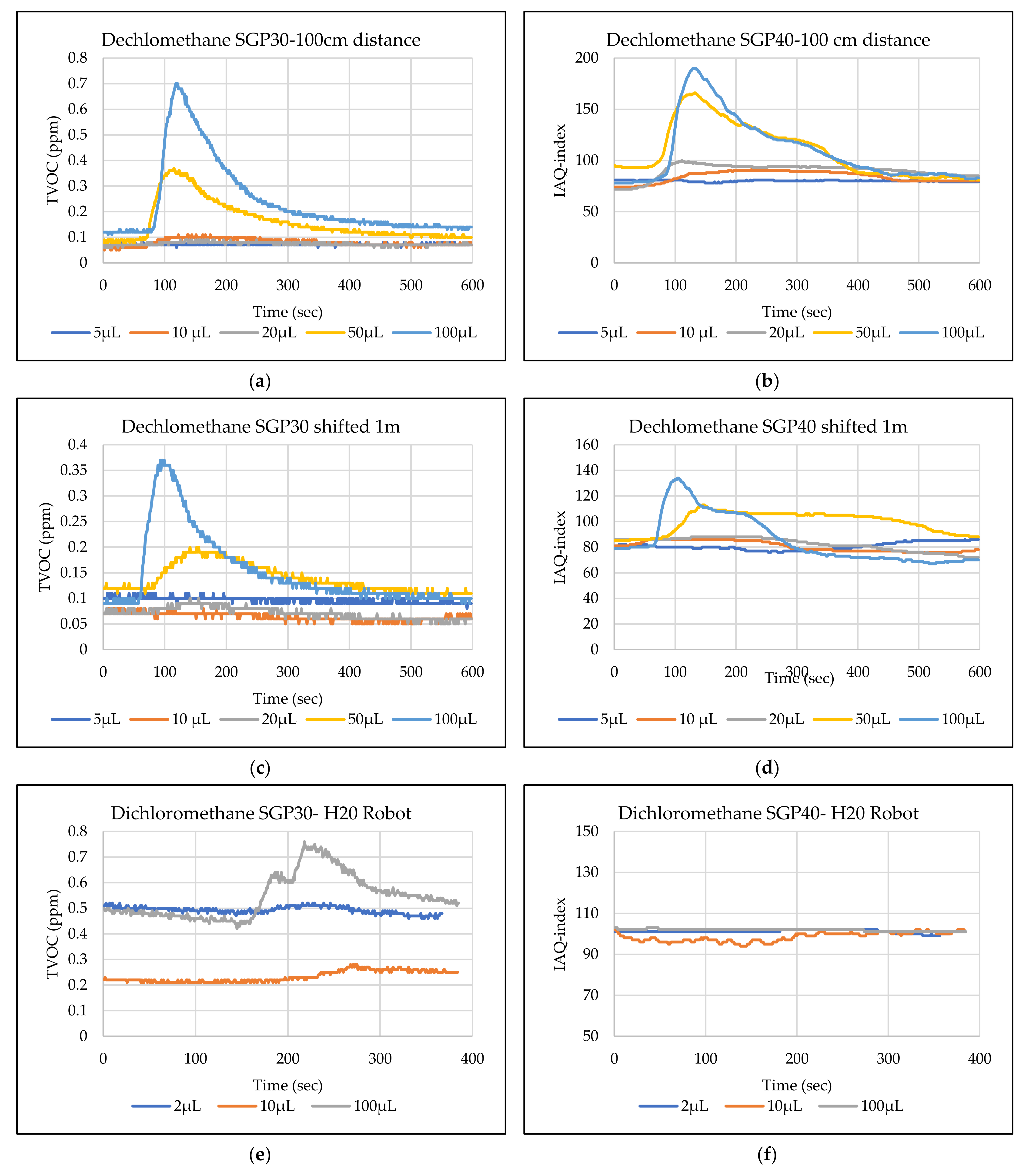
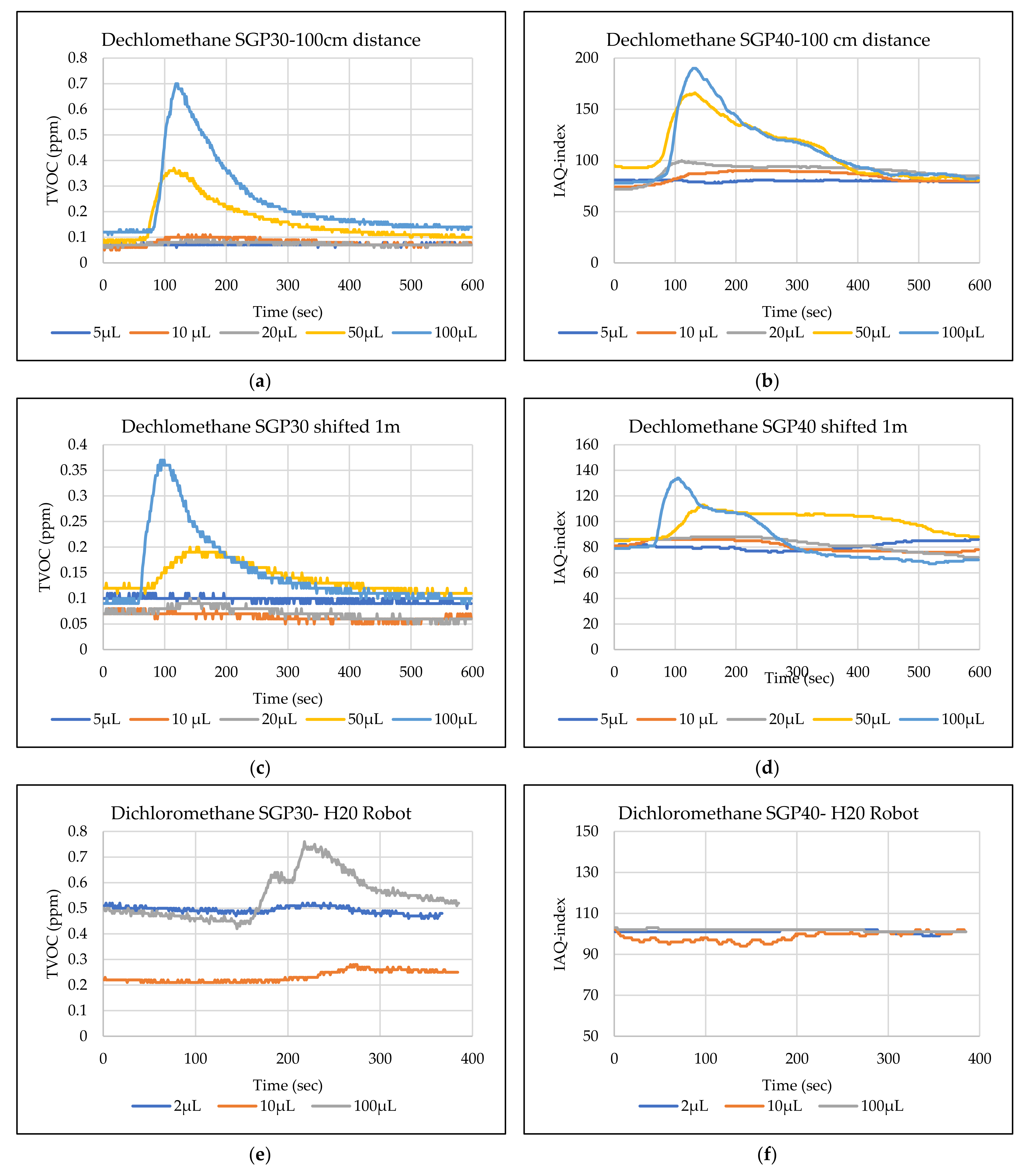
- Dichloromethane: the tests show that the TVOC of the SGP30 sensor can detect volumes ≥ 100 µL inside the hood for both positions. The IAQ-index of the SGP40 can detect the volumes ≥ 50 µL directly under the sensor and volumes ≥ 100 µL for the second position. In the H20 robot tests, the SGP30 can detect volumes ≥ 100 µL, whereas no detection was possible with the SGP40.
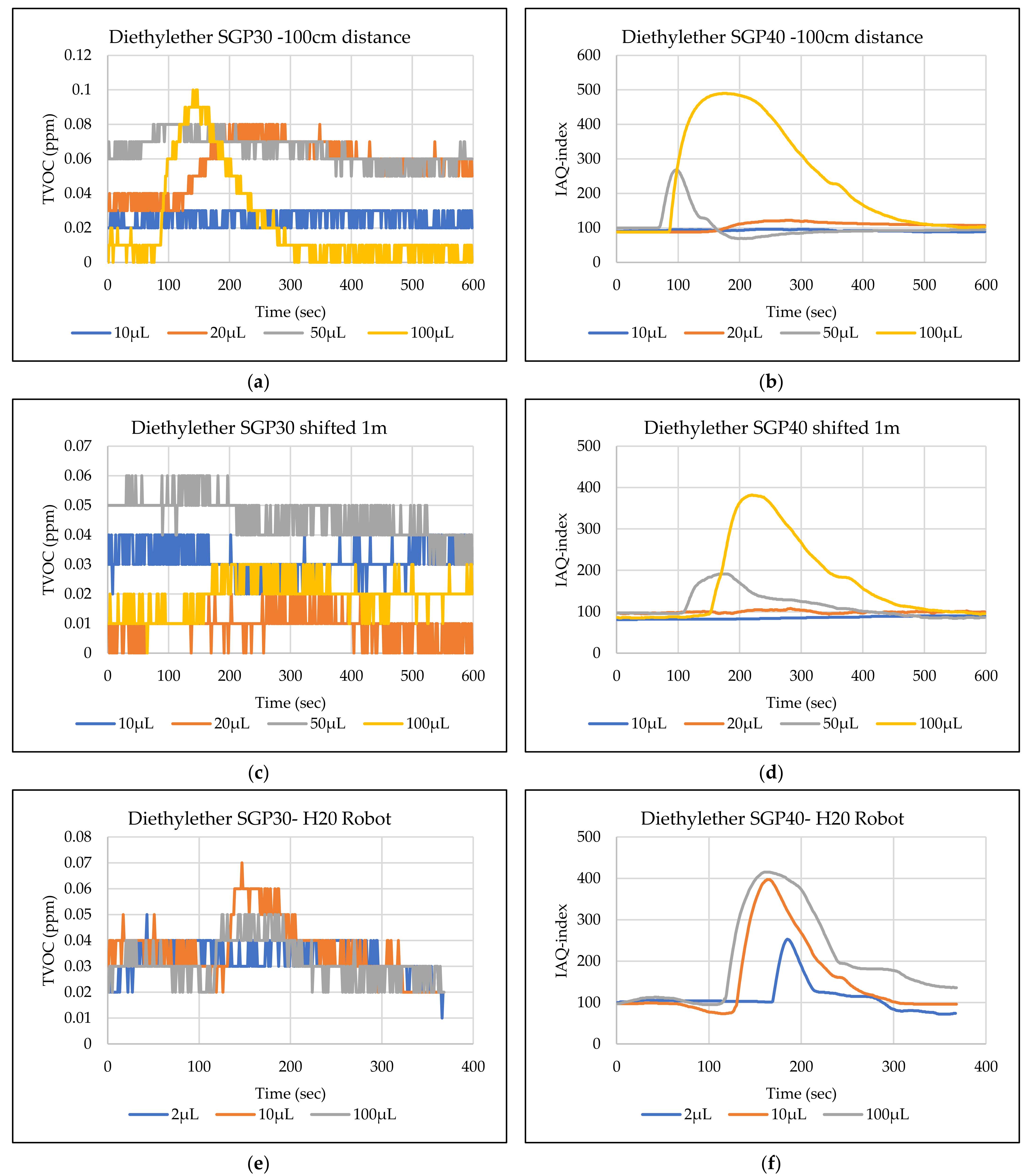
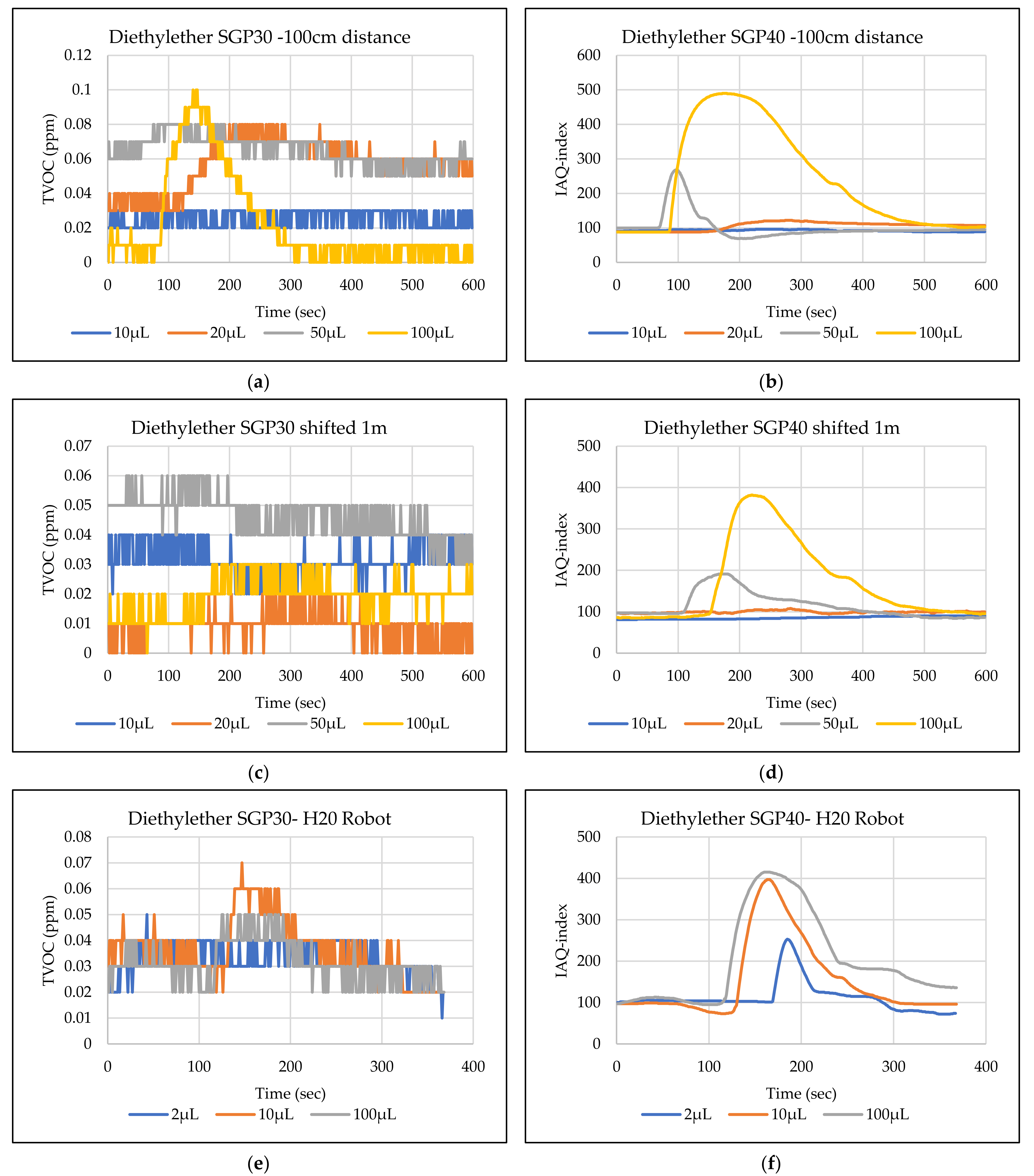
- Diethyl ether: the tests show a weak reaction of the TVOC of the SGP30 for all tested volumes at both positions. The IAQ-index of the SGP40 enables the detection of volumes ≥ 50 µL for both positions. The H20 robot tests again show a weak reaction of the SGP30 sensor for all tested volumes. The H20 robot tests for SGP40 show better performance and enable detection of volumes ≥ 2 µL.
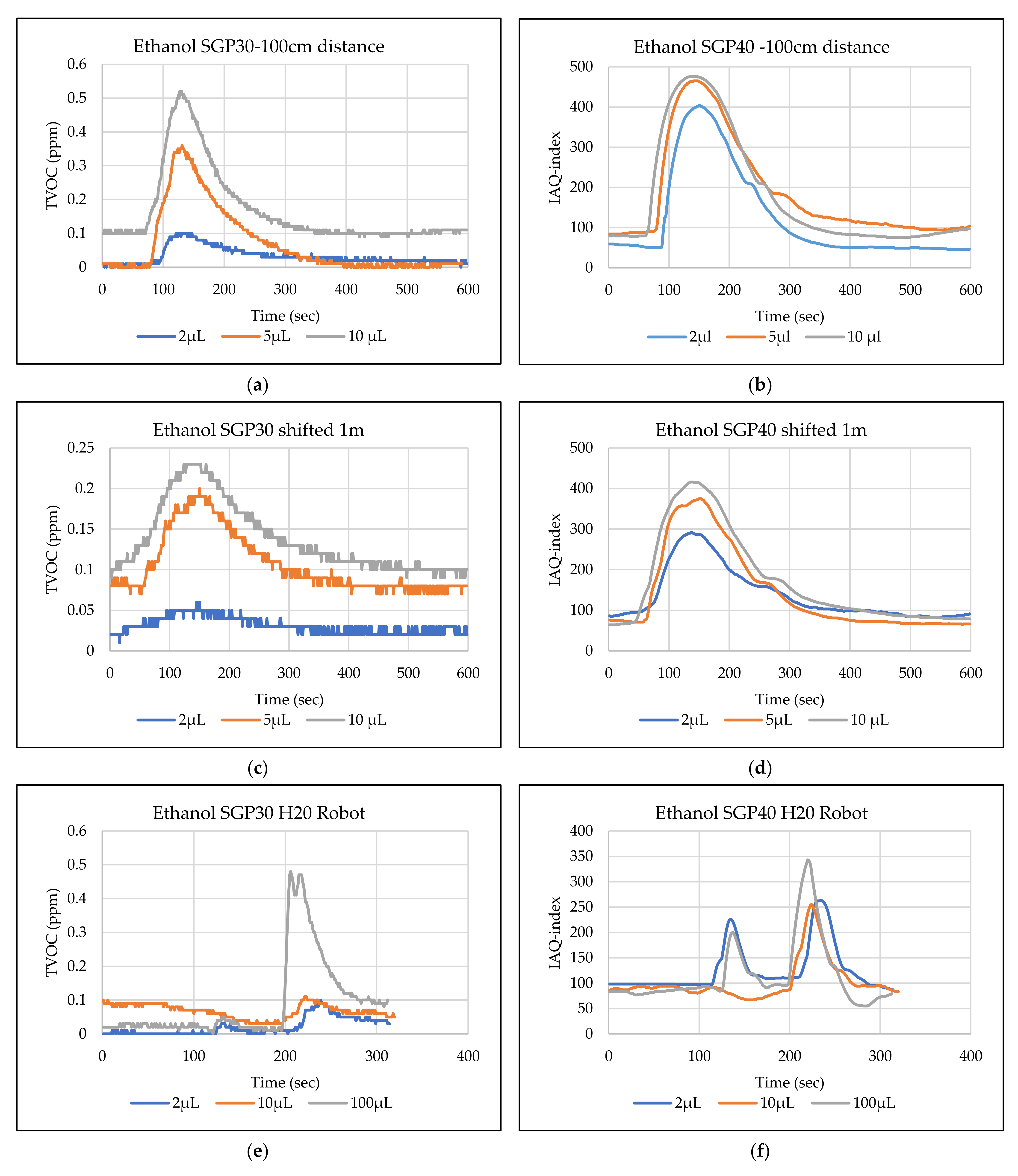
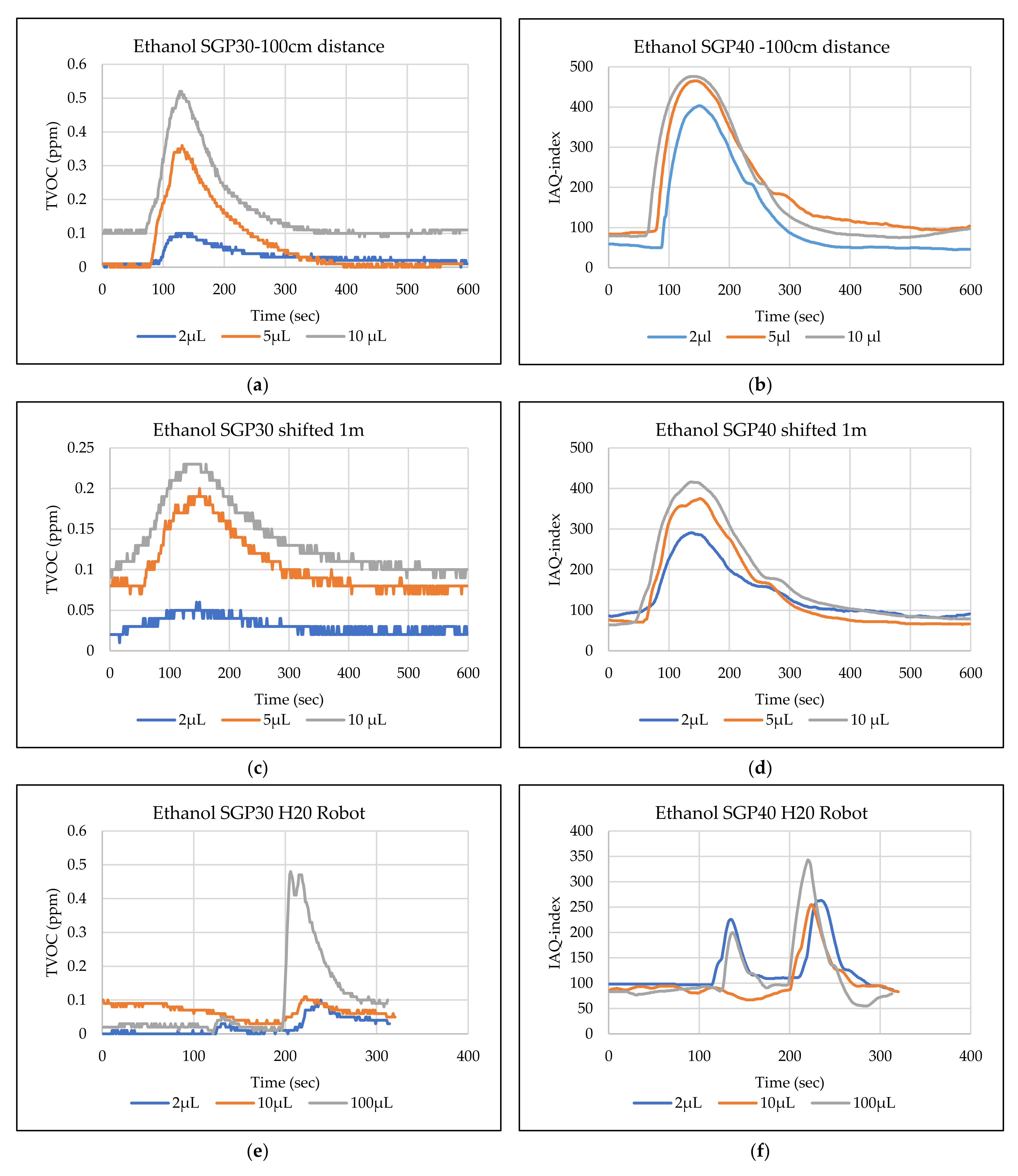
- Ethanol: inside the hood, the TVOC of the SGP30 sensor can detect volumes ≥ 5 µL inside the hood for the first position. A slightly weaker response can be found for the second position. The IAQ-index of SGP40 can detect volumes ≥2 µL for both positions. The H20 robot tests show that the SGP30 can detect volumes ≥ 100 µL, whereas the SGP40 shows better performance and enables the detection of volumes ≥ 2 µL.
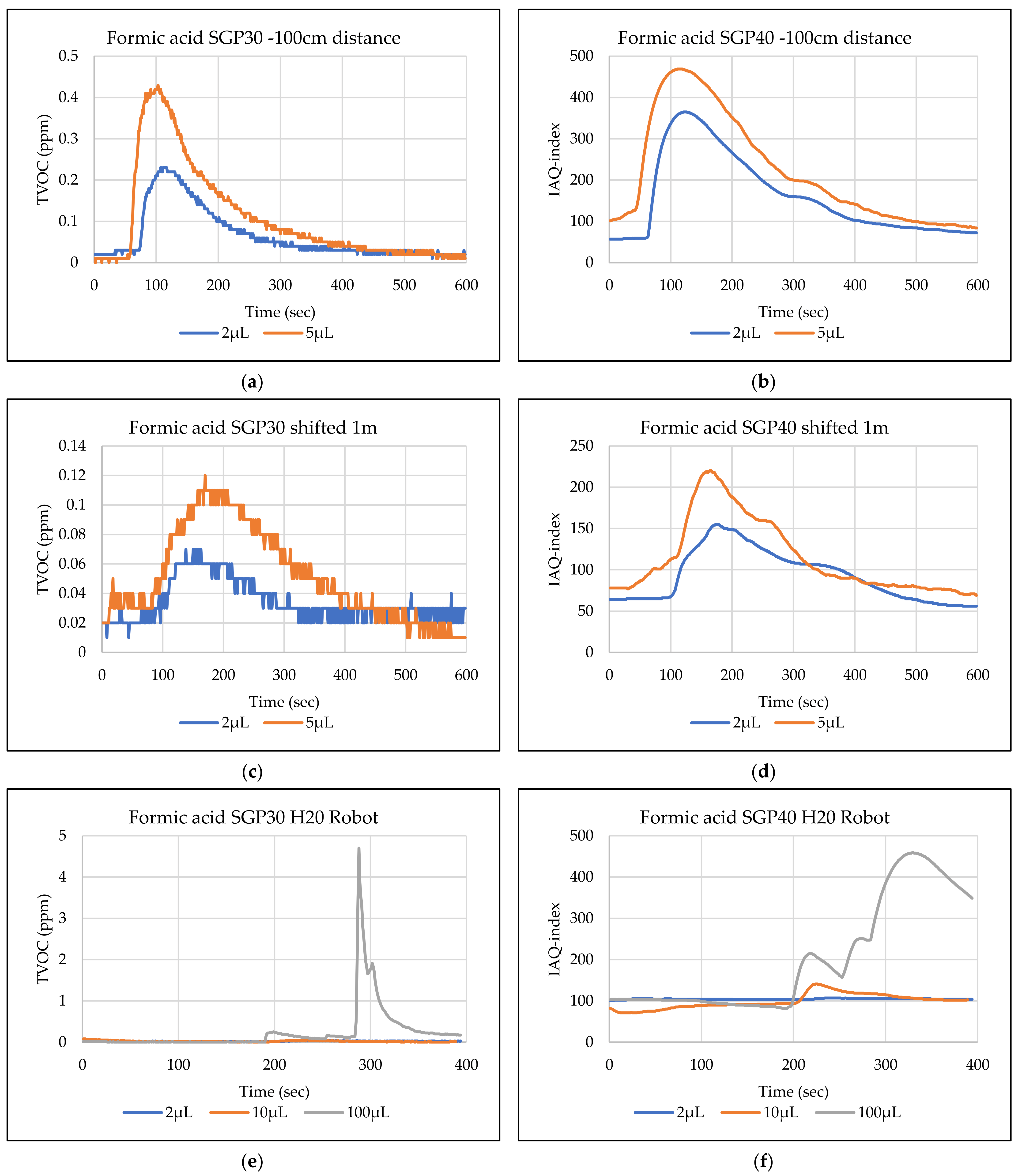
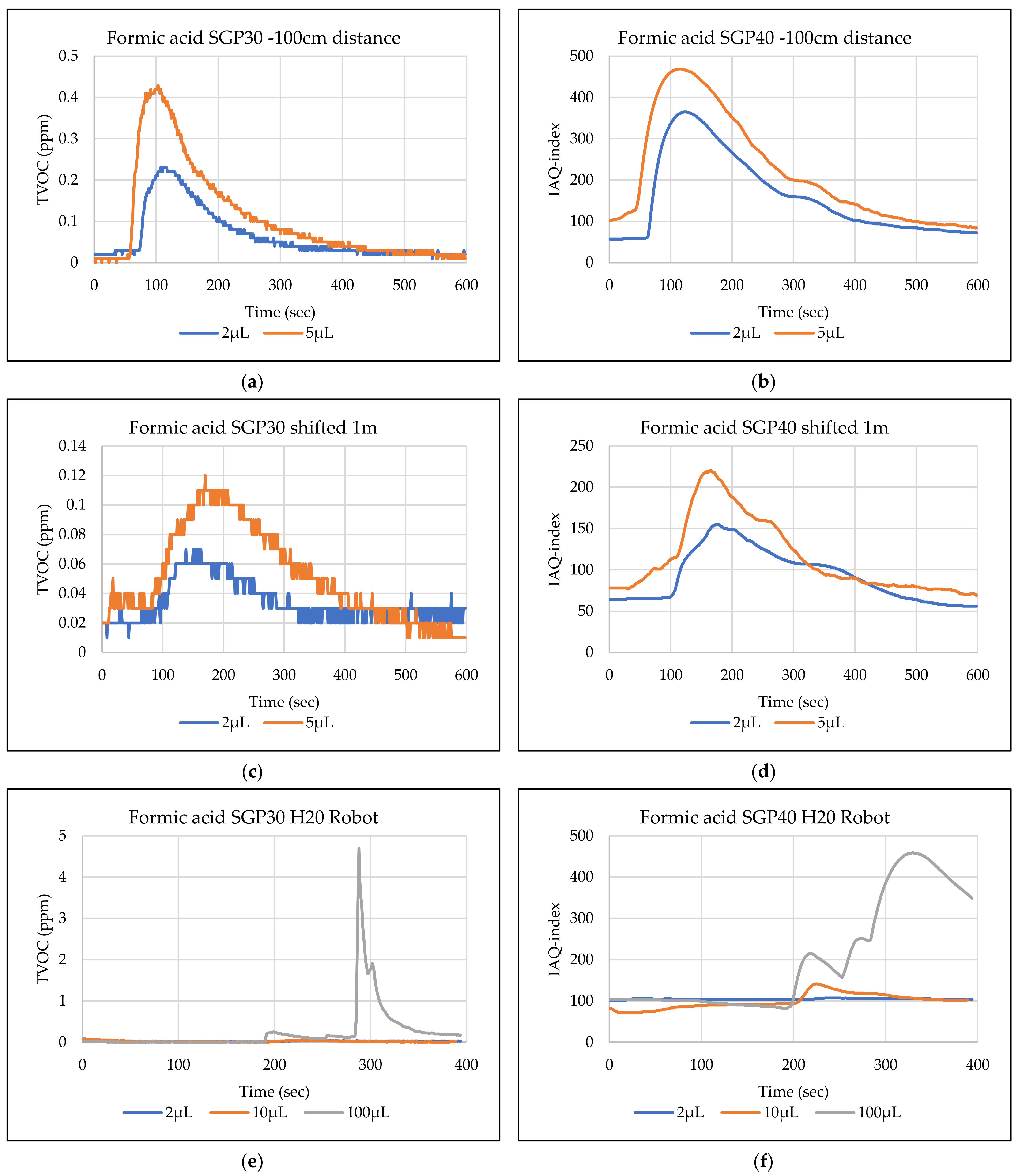
- Formic acid: the TVOC of the SGP30 sensor enables the detection of volumes ≥ 2 µL inside the hood for the first position, and ≥5 µL for the second position, respectively. The IAQ-index of SGP40 can detect volumes ≥ 2 µL for both positions. The H20 robot tests show that the SGP30 and SGP40 can detect volumes ≥ 100 µL.
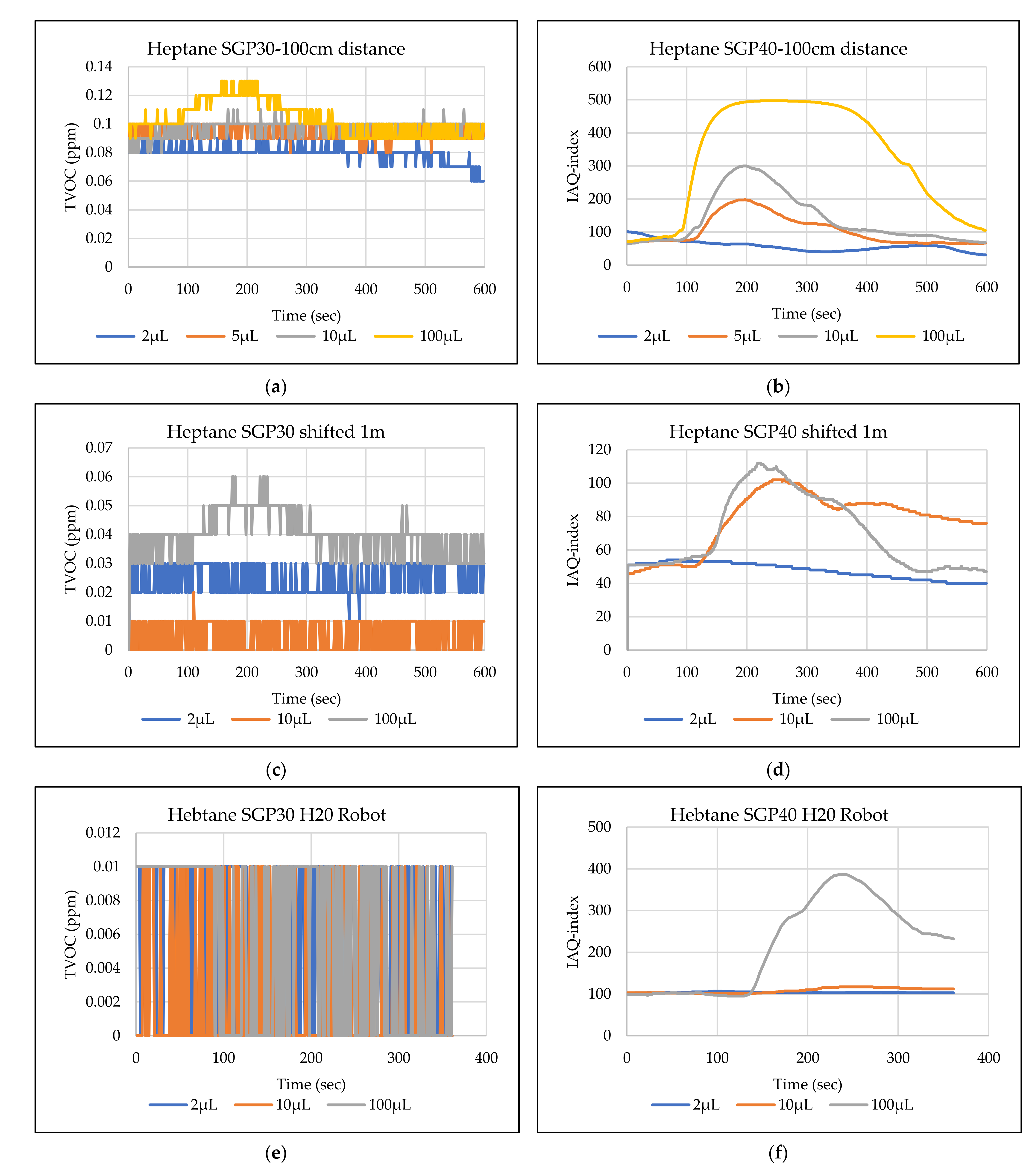
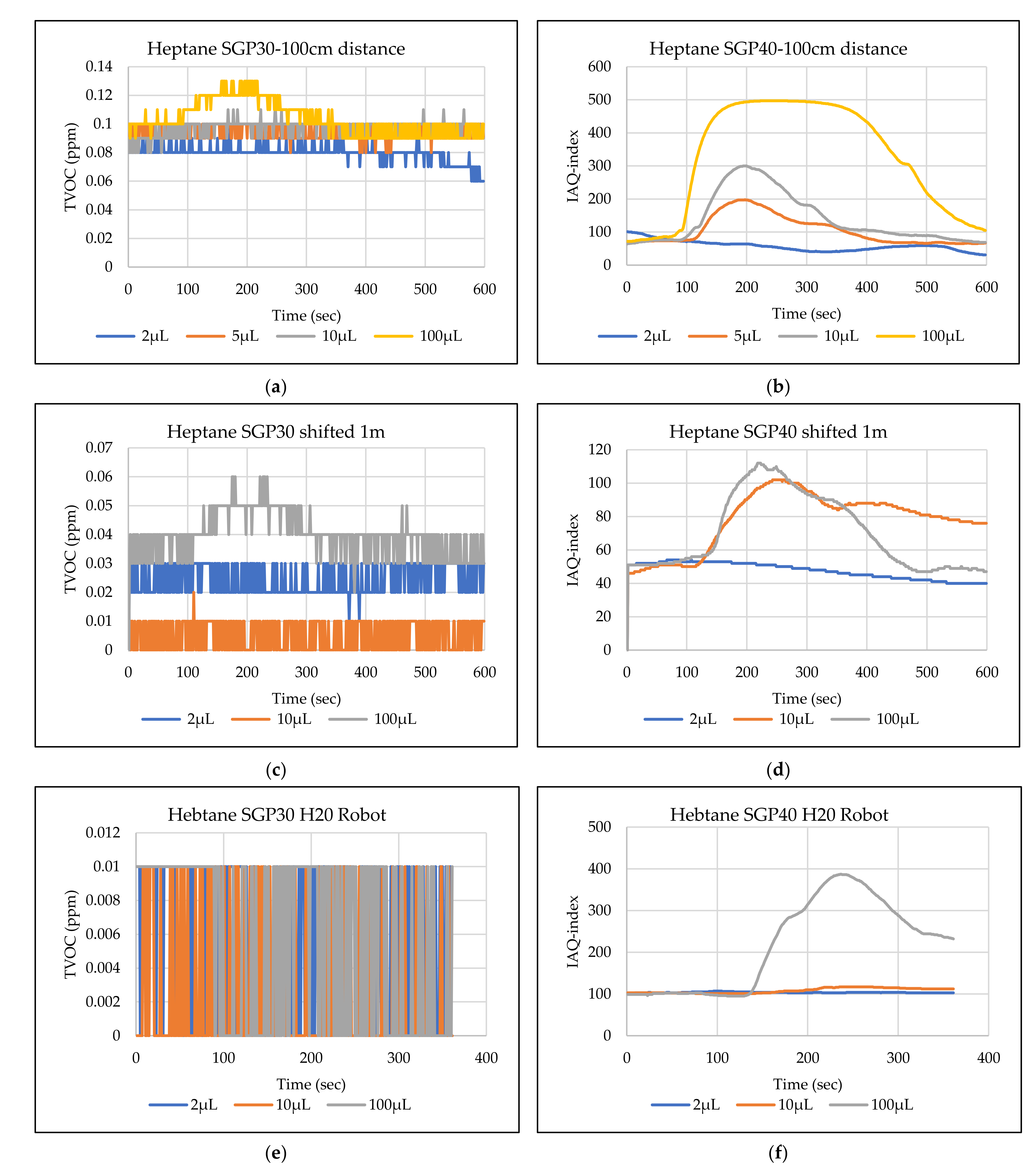
- Heptane: for all tested volumes, no sensor signals were detected for the TVOC of the SGP30 in both positions. The IAQ-index of SGP40 can detect volumes ≥ 5 µL for both positions. The H20 robot tests again show that the SGP30 cannot detect volumes below 100 µL. In contrast, the tests for the SGP40 resulted in minimum detectable volumes ≥ 100 µL.
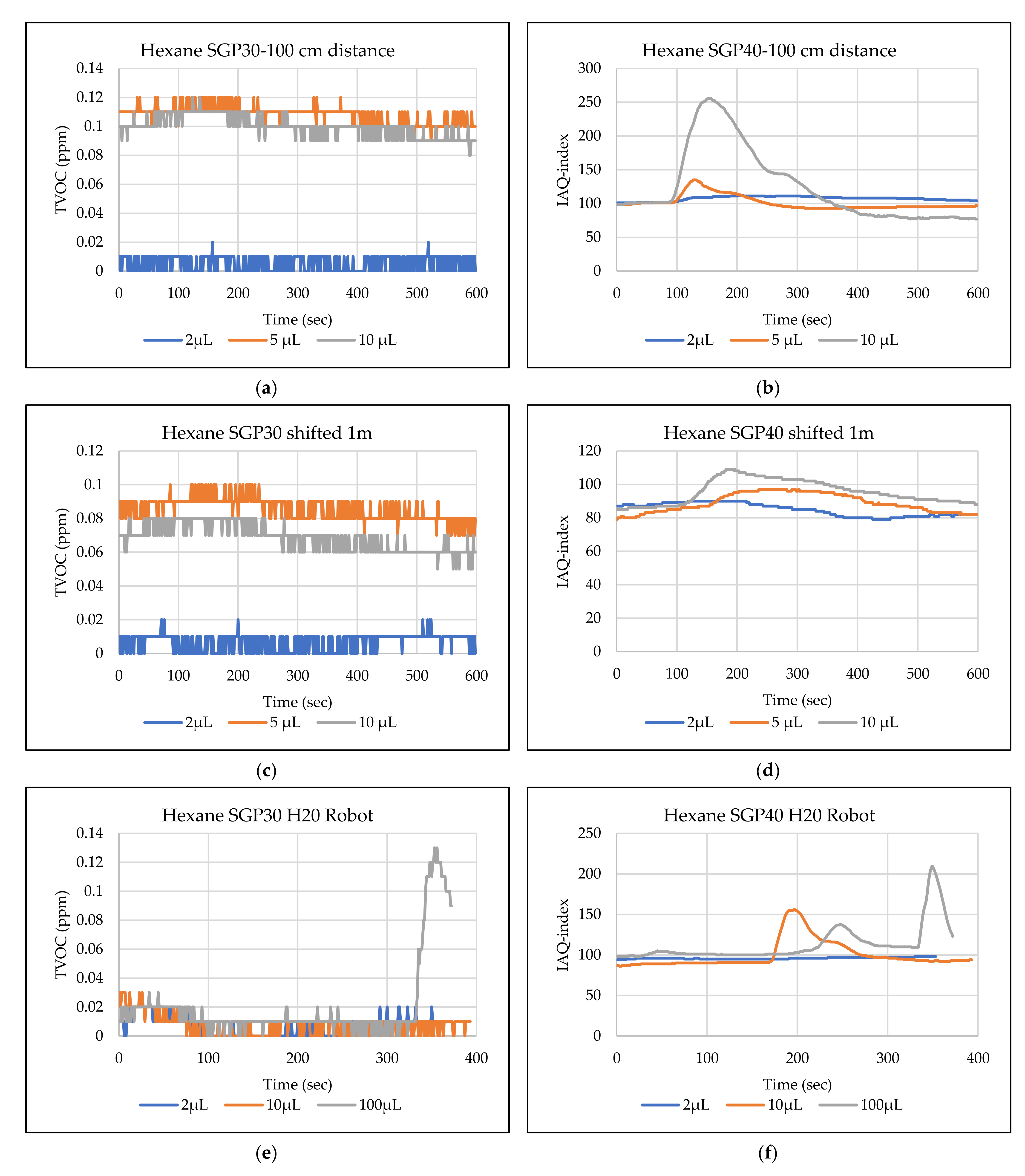
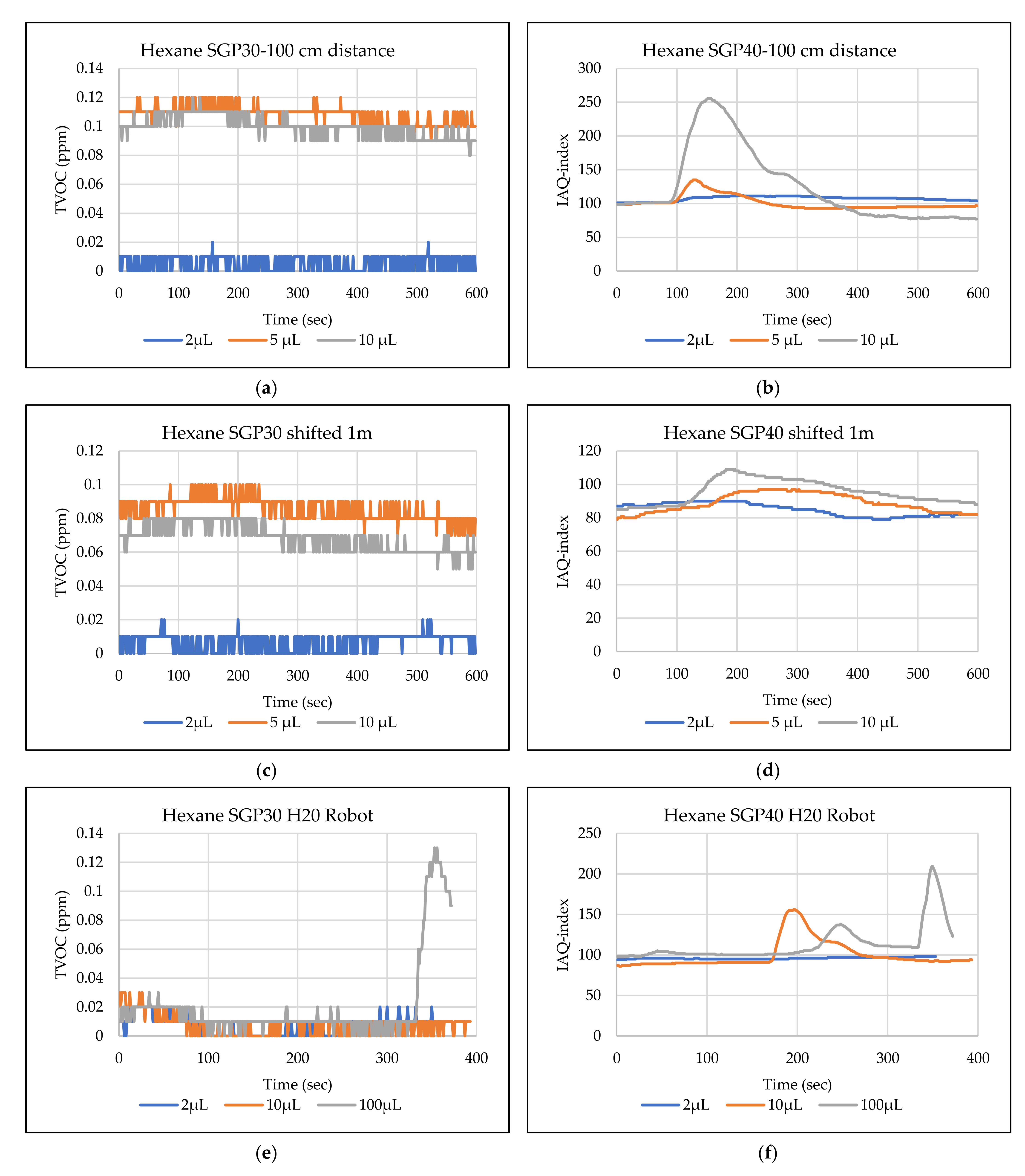
- Hexane: the tests show that the TVOC of the SGP30 sensor cannot detect the tested volumes for both positions. The IAQ-index of SGP40 can detect volumes ≥ 5 µL for the first position but failed for the second position. The H20 robot tests show that the SGP30 can detect volumes ≥ 100 µL, whereas the SGP40 enables the detection of volumes ≥ 10 µL.
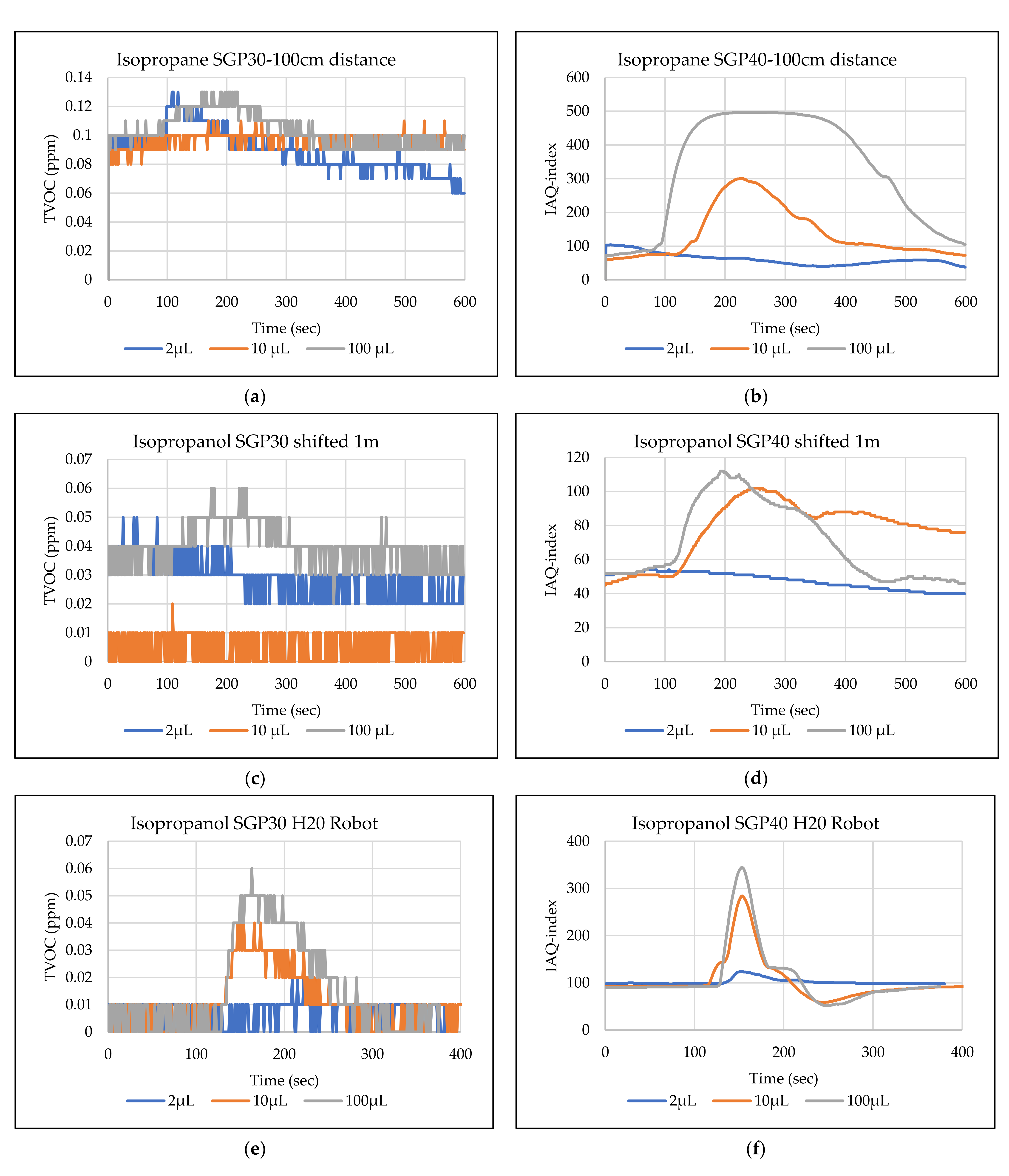
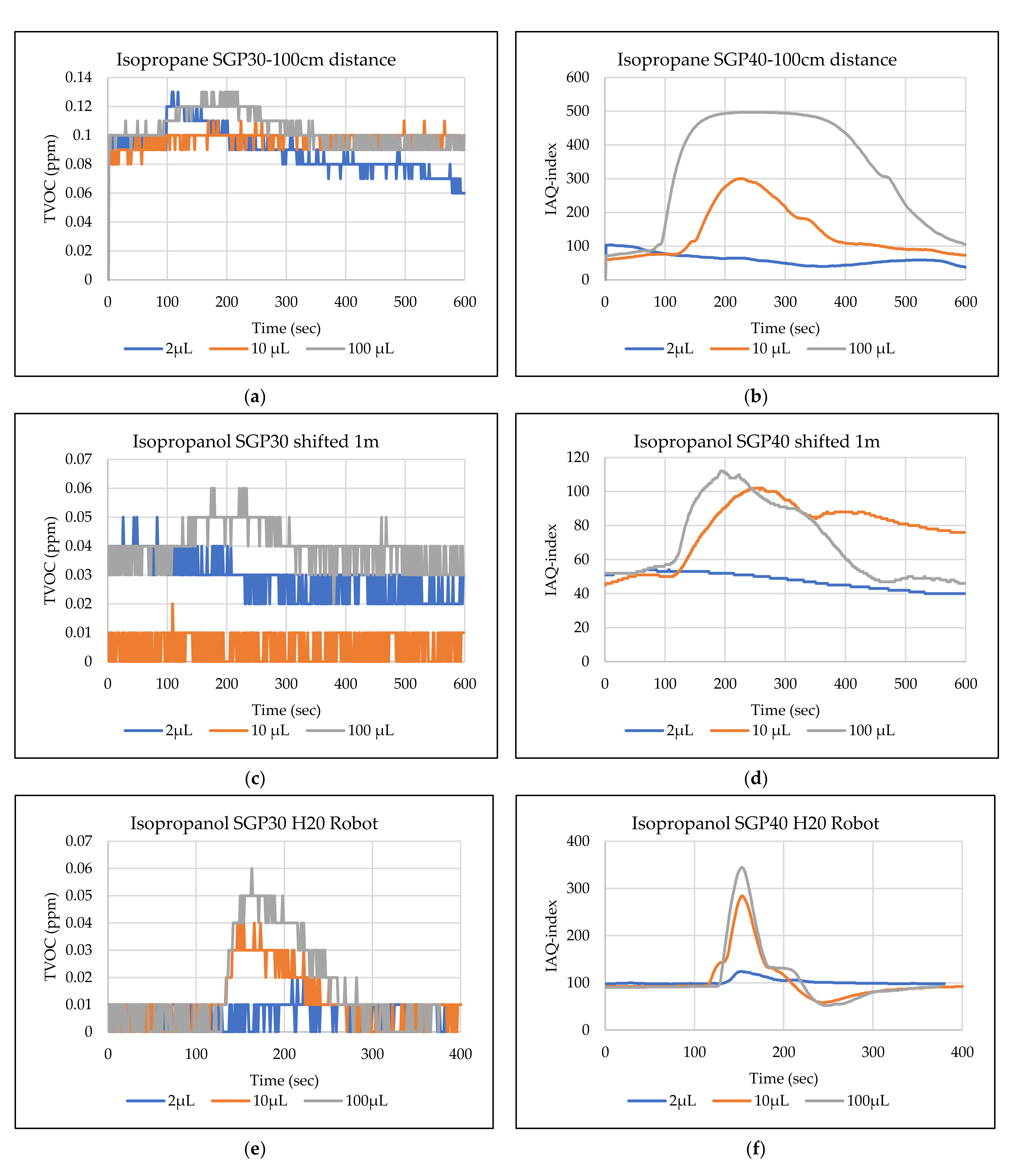
- Isopropanol: the tests show a weak response that the TVOC of the SGP30 sensor reacts weak for all the 2 µL, 10 µL, and 100 µL for both positions. The IAQ-index of SGP40 can detect the volumes ≥ 10 µL for both positions. The H20 robot tests show that the SGP30 reacts weak for all tested volumes, whereas the SGP40 shows a better performance and can clearly detect volumes ≥ 10 µL.
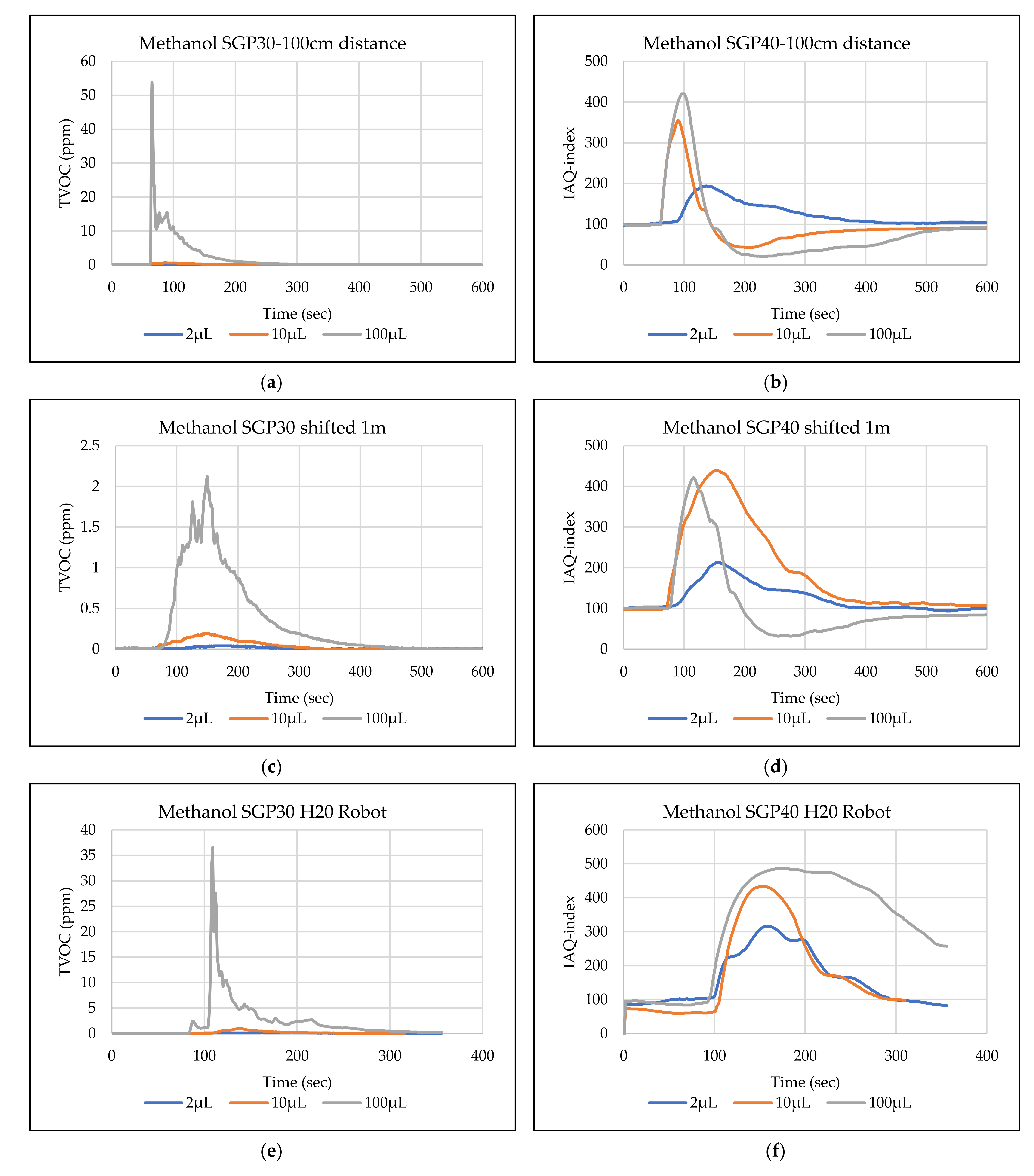
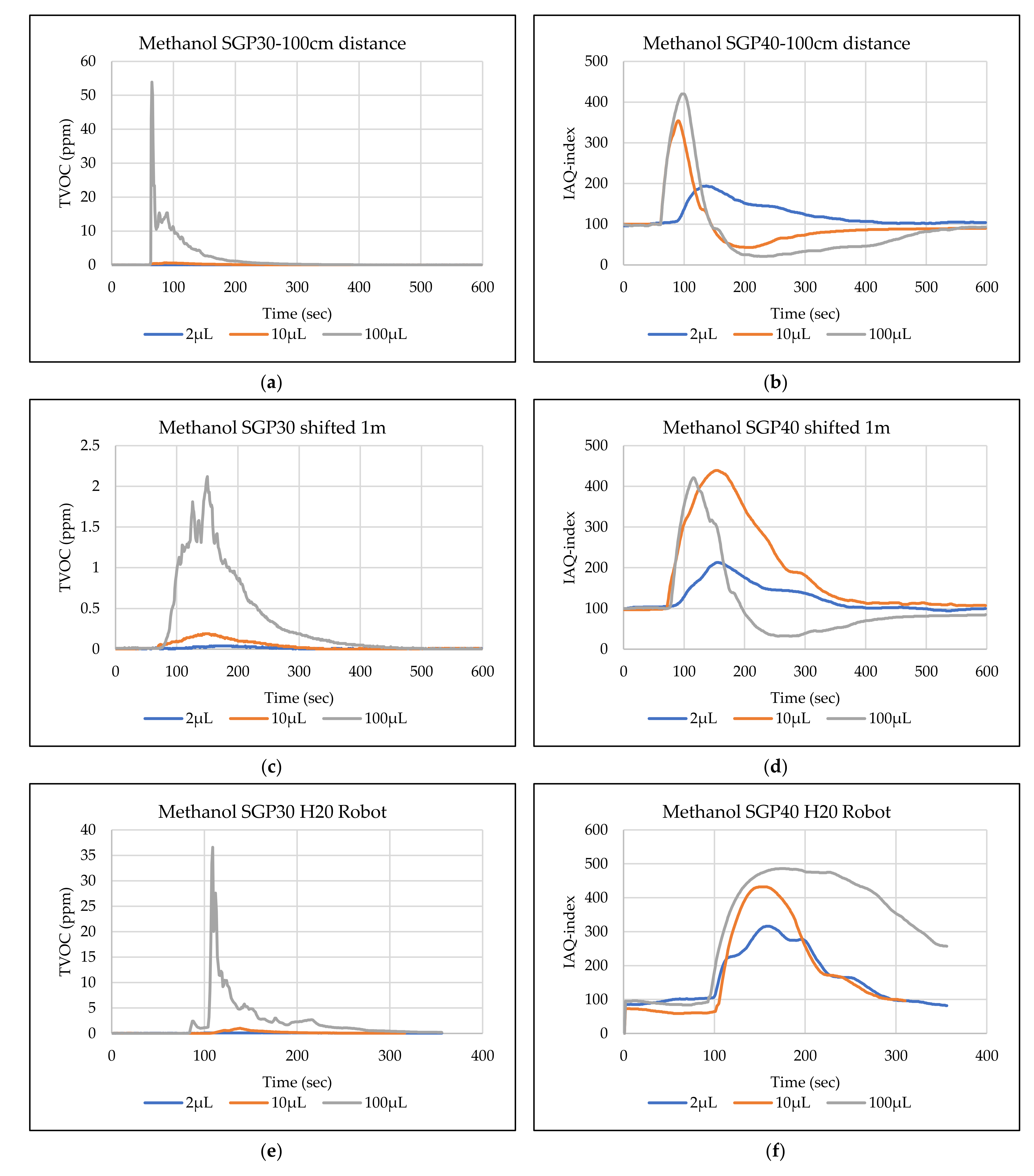
- Methanol: the tests inside the hood show that the TVOC of the SGP30 sensor can detect volumes ≥ 100 µL for both positions. The IAQ-index of the SGP40 showed a good signal for volumes ≥ 2 µL for both positions. In the H20 robot tests, volumes ≥ 100 µL can be detected with the SGP 30. The SGP40 again shows better performance and enables the detection of volumes ≥ 2 µL.
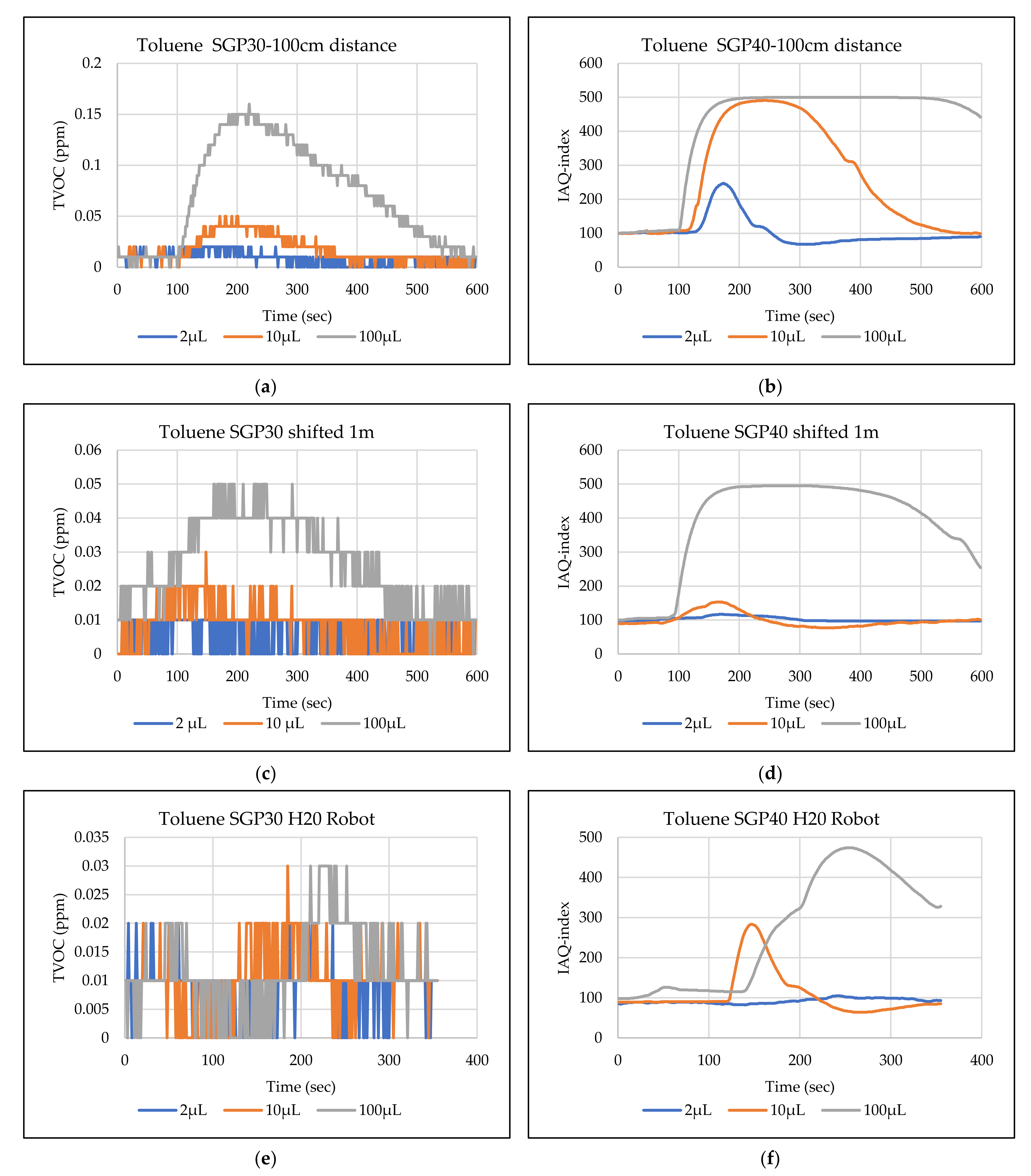
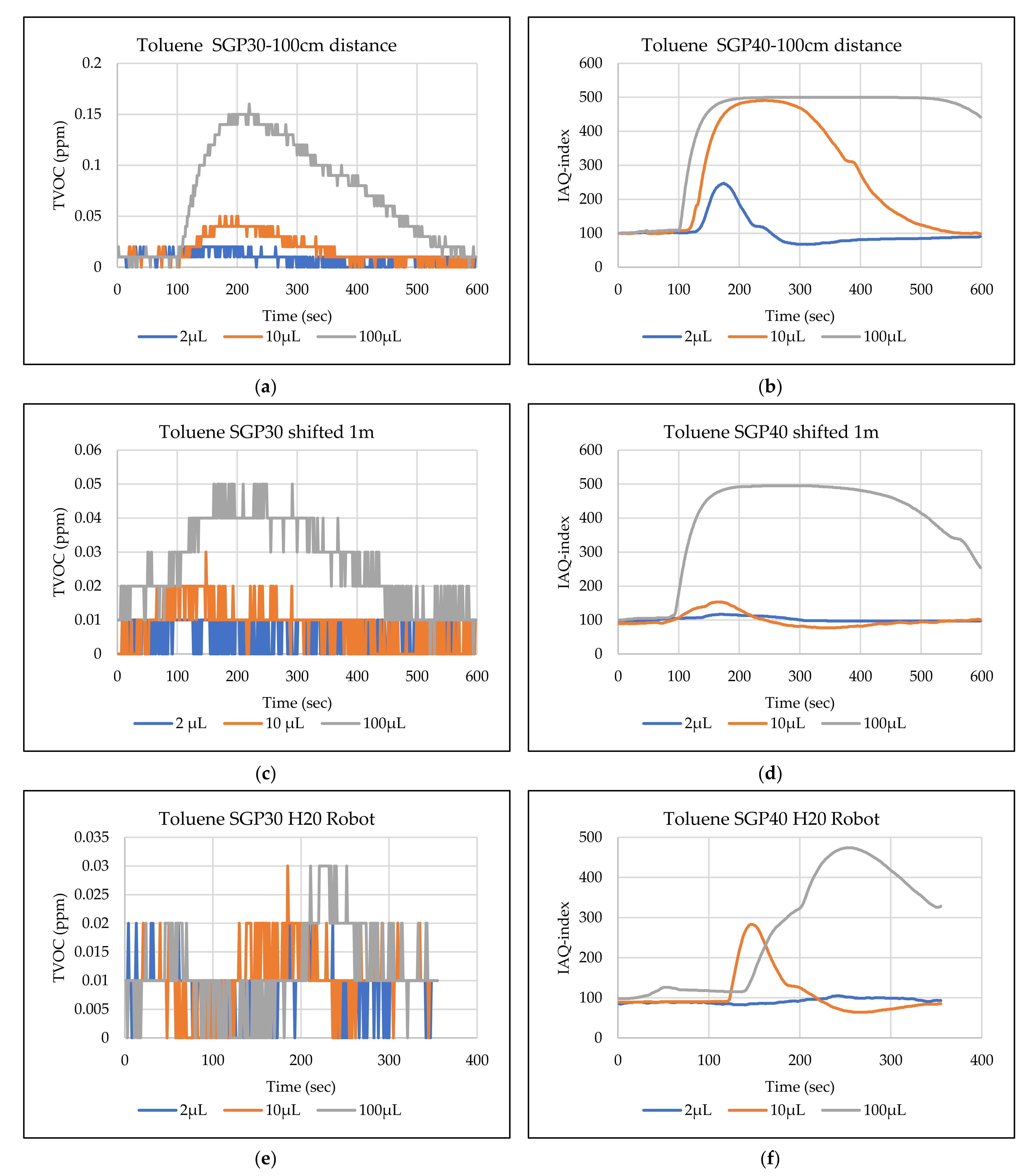
- Toluene: the tests inside the hood show that the TVOC of the SGP30 sensor can detect volumes ≥ 100 µL for the first position, whereas only a weak signal could be found for all tested volumes for the second position. The IAQ-index of the SGP40 can detect volumes ≥ 2 µL directly under the sensor and volumes ≥ 100 µL for the second position. In the H20 robot tests, no signals were detected for all tested volumes for the SGP30. The SGP40 enables the detection of volumes ≥ 10 µL.
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Neubert, S.; Roddelkopf, T.; Al-Okby, M.F.R.; Junginger, S.; Thurow, K. Flexible IoT Gas Sensor Node for Automated Life Science Environments Using Stationary and Mobile Robots. Sensors 2021, 21, 7347. [Google Scholar] [CrossRef] [PubMed]
- Palacín, J.; Martínez, D.; Clotet, E.; Pallejà, T.; Burgués, J.; Fonollosa, J.; Pardo, A.; Marco, S. Application of an Array of Metal-Oxide Semiconductor Gas Sensors in an Assistant Personal Robot for Early Gas Leak Detection. Sensors 2019, 19, 1957. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Burgués, J.; Hernández, V.; Lilienthal, A.J.; Marco, S. Smelling Nano Aerial Vehicle for Gas Source Localization and Mapping. Sensors 2019, 19, 478. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Esfahani, S.; Tiele, A.; Agbroko, S.O.; Covington, J.A. Development of a Tuneable NDIR Optical Electronic Nose. Sensors 2020, 20, 6875. [Google Scholar] [CrossRef] [PubMed]
- Shi, B.; Zhu, N.; Zhang, Y. Investigation of Volatile Organic Compound Gas Sensor Based on Polydimethylsiloxane Self-Assembled Fabry-Perot Interferometer. In Proceedings of the 2020 IEEE 5th Optoelectronics Global Conference (OGC), Shenzhen, China, 7–11 September 2020; pp. 105–108. [Google Scholar] [CrossRef]
- Arroyo, P.; Gómez-Suárez, J.; Suárez, J.I.; Lozano, J. Low-Cost Air Quality Measurement System Based on Electrochemical and PM Sensors with Cloud Connection. Sensors 2021, 21, 6228. [Google Scholar] [CrossRef] [PubMed]
- Al-Okby, M.F.R.; Al-Barrak, S.S. New Approach for Fall Detection System Using Embedded Technology. In Proceedings of the 2020 IEEE 24th International Conference on Intelligent Engineering Systems (INES), Reykjavík, Iceland, 8–10 July 2020; pp. 209–214. [Google Scholar] [CrossRef]
- Al-Okby, M.F.R.; Thurow, K. WeMos IoT Controller-Based Low-Cost Fall Detection System for Elderly Users. J. Biomim. Biomater. Biomed. Eng. 2021, 50, 59–72. [Google Scholar] [CrossRef]
- Al-Okby, M.F.R.; Neubert, S.; Stoll, N.; Thurow, K. Complementary functions for intelligent wheelchair head tilts controller. In Proceedings of the 2017 IEEE 15th International Symposium on Intelligent Systems and Informatics (SISY), Subotica, Serbia, 14–16 September 2017; pp. 000117–000122. [Google Scholar] [CrossRef]
- Ruzaij, M.F.; Neubert, S.; Stoll, N.; Thurow, K. A speed compensation algorithm for a head tilts controller used for wheelchairs and rehabilitation applications. In Proceedings of the 2017 IEEE 15th International Symposium on Applied Machine Intelligence and Informatics (SAMI), Herl’any, Slovakia, 26–28 January 2017; pp. 000497–000502. [Google Scholar] [CrossRef]
- Al-Okby, M.F.R.; Neubert, S.; Stoll, N.; Thurow, K. Low-Cost, Flexible, and Reliable Hybrid Wheelchair Controller for Patients with Tetraplegia. In Proceedings of the 2019 IEEE International Conference on Cyborg and Bionic Systems (CBS), Munich, Germany, 18–20 September 2019; pp. 177–183. [Google Scholar] [CrossRef]
- Al-Okby, M.F.R.; Neubert, S.; Roddelkopf, T.; Thurow, K. Mobile Detection and Alarming Systems for Hazardous Gases and Volatile Chemicals in Laboratories and Industrial Locations. Sensors 2021, 21, 8128. [Google Scholar] [CrossRef] [PubMed]
- I-Okby, M.F.R.A.; Neubert, S.; Roddelkopf, T.; Thurow, K. Integration and Testing of Novel MOX Gas Sensors for IoT-based Indoor Air Quality Monitoring. In Proceedings of the 2021 IEEE 21st International Symposium on Computational Intelligence and Informatics (CINTI), Budapest, Hungary, 18–20 November 2021; pp. 000173–000180. [Google Scholar] [CrossRef]
- VOC Sensor SGP30/SGPC3 (NRND)|Sensirion. Available online: https://www.sensirion.com/en/environmental-sensors/gas-sensors/sgp30/ (accessed on 29 December 2021).
- VOC Sensor SGP40|Sensirion. Available online: https://www.sensirion.com/en/environmental-sensors/gas-sensors/sgp40/ (accessed on 29 December 2021).
- Digital Humidity Sensor SHTC3 (RH/T)|Sensirion. Available online: https://www.sensirion.com/en/environmental-sensors/humidity-sensors/digital-humidity-sensor-shtc3-our-new-standard-for-consumer-electronics/ (accessed on 29 December 2021).
- ESP8266 Wi-Fi MCU I Espressif Systems. Available online: https://www.espressif.com/en/products/socs/esp8266 (accessed on 30 December 2021).
- U.S. Environmental Protection Agency. Available online: https://www.epa.gov/indoor-air-quality-iaq/introduction-indoor-air-quality (accessed on 1 October 2021).
- ADMIN. How TVOC Affects Indoor Air Quality: Effects on Wellbeing and Health. ASN Home. 2020. Available online: https://www.advsolned.com/how-tvoc-affects-indoor-air-quality-effects-on-wellbeing-and-health/ (accessed on 30 December 2021).
- TVOC. Available online: https://easlab.com/iaqref.htm (accessed on 30 December 2021).
- Meyer, C. Overview of TVOC and Indoor Air Quality. 2020. Available online: https://www2.renesas.cn/us/en/document/whp/overview-tvoc-and-indoor-air-quality (accessed on 30 December 2021).
- Abelmann, S.; German Committee on Indoor Air Guide Values. Umweltbundesamt. 2013. Available online: https://www.umweltbundesamt.de/en/topics/health/commissions-working-groups/german-committee-on-indoor-air-guide-values (accessed on 30 December 2021).
- Umweltbundesamt. Beurteilung von Innenraumluftkontaminationen mittels Referenz- und Richtwerten: Handreichung der Ad-hoc-Arbeitsgruppe der Innenraumlufthygiene-Kommission des Umweltbundesamtes und der Obersten Landesgesundheitsbehörden. Bundesgesundheitsblatt-Gesundh.-Gesundh. 2007, 50, 990–1005. [Google Scholar] [CrossRef] [PubMed]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| IAQ Levels | Category | IAQ-Index Values | TVOC [ppm] |
|---|---|---|---|
| 1 | Good | 0–50 | 0–0.065 |
| 2 | Moderate | 51–100 | 0.066–0.22 |
| 3 | Unhealthy for sensitive peoples | 101–150 | 0.23–0.66 |
| 4 | Unhealthy | 151–200 | 0.67–2.2 |
| 5 | Very unhealthy | 201–300 | 2.3–5.5 |
| 6 | Hazardous | 301–500 | >5.5 |
| Name | Molecular Formula | Boiling Point in °C |
|---|---|---|
| Acetone | C3H6O | 56 |
| Acetonitrile | C2H3N | 82 |
| Benzene | C6H6 | 80.1 |
| Dichloromethane | CH2Cl2 | 39.6 |
| Diethyl ether | C4H10O | 34.6 |
| Ethanol | C2H6O | 78.37 |
| Formic acid | CH2O2 | 100.8 |
| Heptane | C7H16 | 98.42 |
| Hexane | C6H14 | 69 |
| Isopropanol | C3H8O | 82.5 |
| Methanol | CH3OH | 64.7 |
| Toluene | C7H8 | 110.6 |
| VOC | SGP30-P1 | SGP30-P2 | SGP30-H20 | SGP40-P1 | SGP40-P2 | SGP40-H20 |
|---|---|---|---|---|---|---|
| Acetone | ≥10 μL | ≥10 μL | ≥100 μL | ≥5 μL | ≥10 μL | ≥10 μL |
| Acetonitrile | ≥10 μL | - | ≥100 μL | ≥5 μL | - | ≥10 μL |
| Benzene | ≥100 μL | - | - | ≥10 μL | ≥100 μL | ≥10 μL |
| Dichloromethane | ≥100 μL | ≥100 μL | ≥100 μL | ≥50 μL | ≥100 μL | - |
| Diethyl ether | - | - | - | ≥50 μL | ≥50 μL | ≥2 μL |
| Ethanol | ≥5 μL | ≥10 μL | ≥100 μL | ≥2 μL | ≥2 μL | ≥2 μL |
| Formic acid | ≥2 μL | ≥5 μL | ≥100 μL | ≥2 μL | ≥2 μL | ≥100 μL |
| Heptane | - | - | ≥100 μL | ≥5 μL | ≥5 μL | ≥100 μL |
| Hexane | - | - | ≥100 μL | ≥5 μL | - | ≥10 μL |
| Isopropanol | - | - | - | ≥10 μL | ≥10 μL | ≥10 μL |
| Methanol | ≥100 μL | ≥100 μL | ≥100 μL | ≥2 μL | ≥2 μL | ≥2 μL |
| Toluene | ≥100 μL | - | - | ≥2 μL | ≥100 μL | ≥10 μL |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Al-Okby, M.F.R.; Neubert, S.; Roddelkopf, T.; Fleischer, H.; Thurow, K. Evaluating of IAQ-Index and TVOC Parameter-Based Sensors for Hazardous Gases Detection and Alarming Systems. Sensors 2022, 22, 1473. https://doi.org/10.3390/s22041473
Al-Okby MFR, Neubert S, Roddelkopf T, Fleischer H, Thurow K. Evaluating of IAQ-Index and TVOC Parameter-Based Sensors for Hazardous Gases Detection and Alarming Systems. Sensors. 2022; 22(4):1473. https://doi.org/10.3390/s22041473
Chicago/Turabian StyleAl-Okby, Mohammed Faeik Ruzaij, Sebastian Neubert, Thomas Roddelkopf, Heidi Fleischer, and Kerstin Thurow. 2022. "Evaluating of IAQ-Index and TVOC Parameter-Based Sensors for Hazardous Gases Detection and Alarming Systems" Sensors 22, no. 4: 1473. https://doi.org/10.3390/s22041473
APA StyleAl-Okby, M. F. R., Neubert, S., Roddelkopf, T., Fleischer, H., & Thurow, K. (2022). Evaluating of IAQ-Index and TVOC Parameter-Based Sensors for Hazardous Gases Detection and Alarming Systems. Sensors, 22(4), 1473. https://doi.org/10.3390/s22041473