
An All-in-One Vehicle Type and License Plate Recognition System Using YOLOv4


Abstract
:1. Introduction
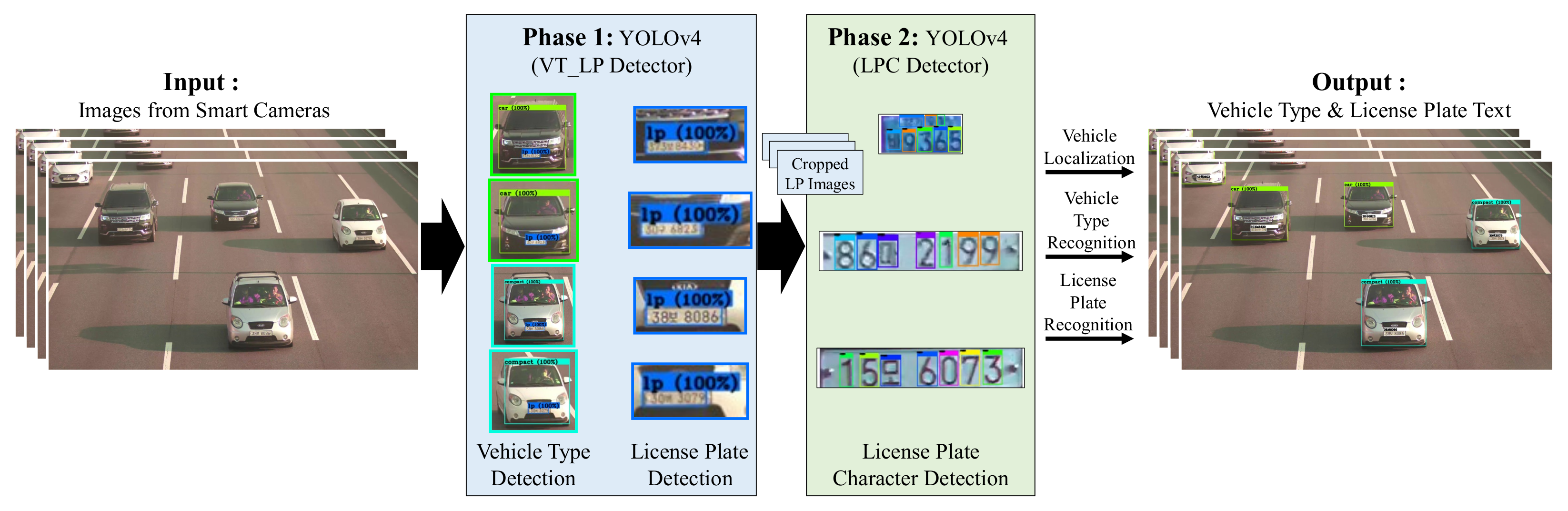
- We propose a two-phase architecture based on YOLOv4 [12] for detecting vehicle types and recognizing Korean LPs in one pipeline.
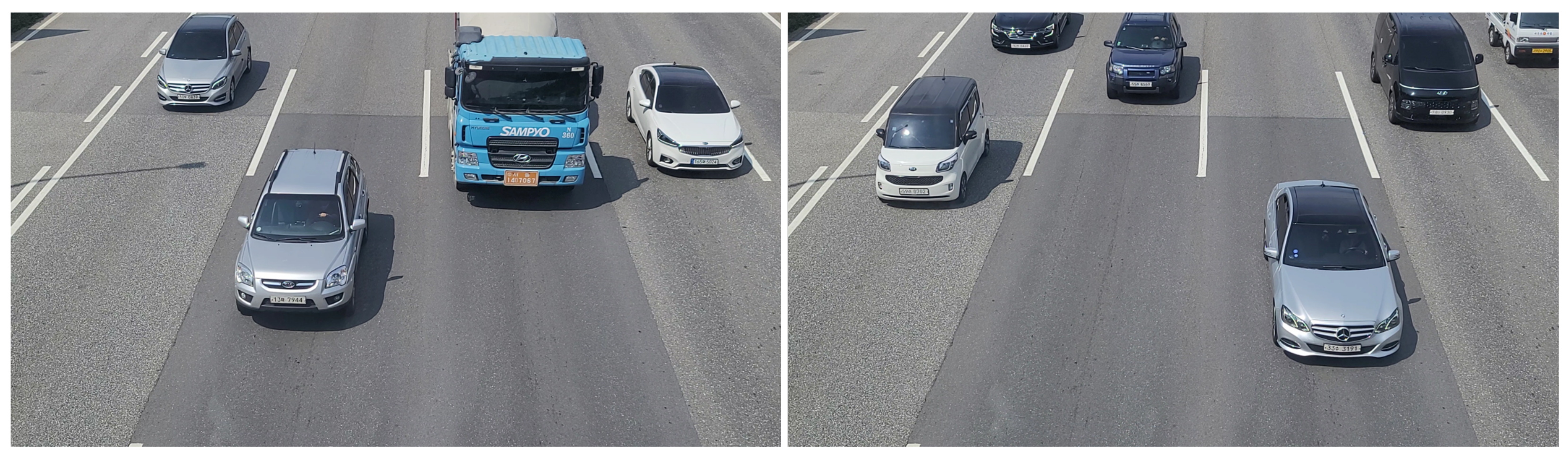
- We collect and build a custom dataset for various Korean vehicle types and LPs captured from multilanes to train and validate two custom detectors in the KVT-LPR.
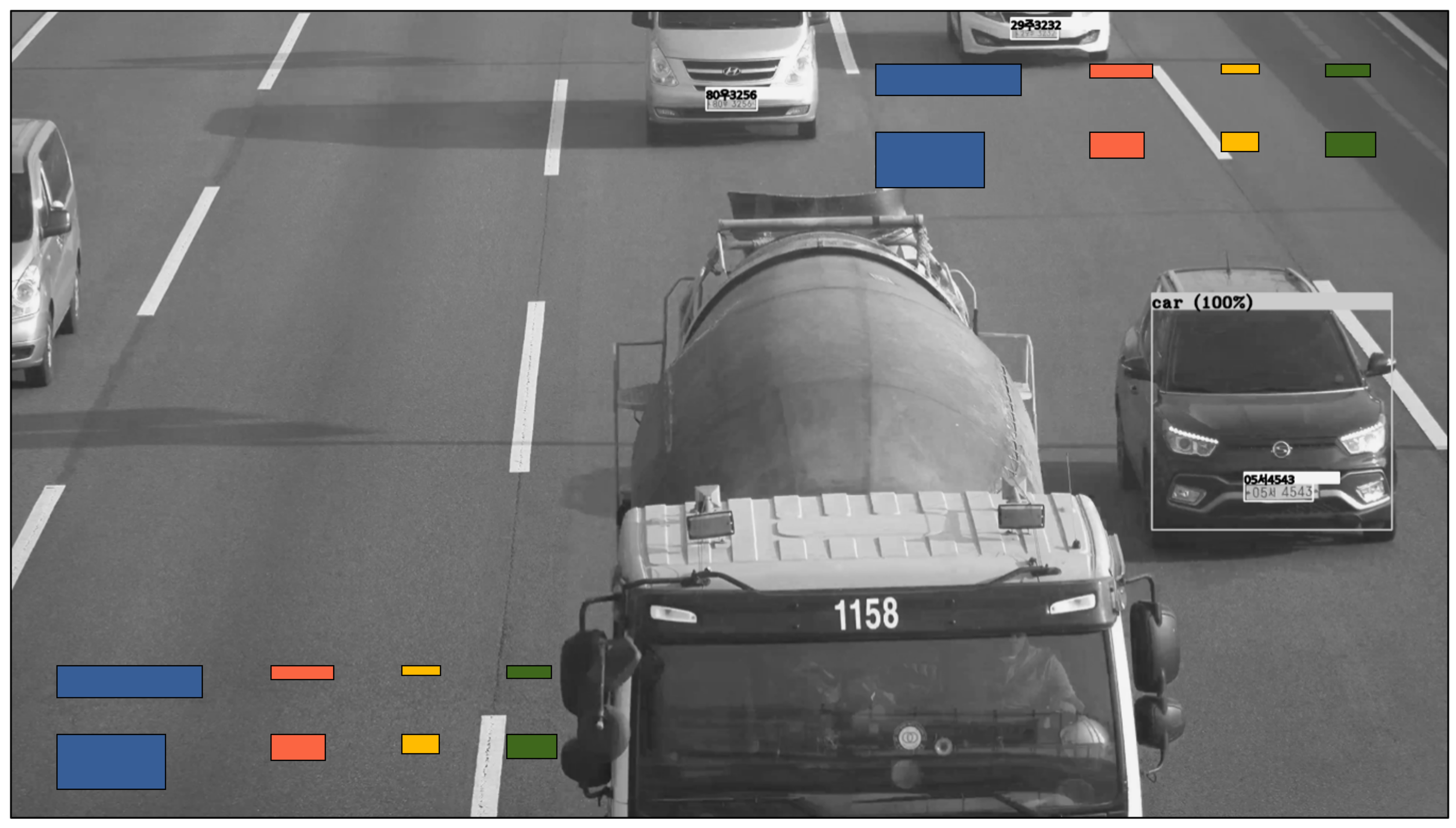
- We show that the KVT-LPR effectively detects small license plates from 4K high-resolution input images, which is an enhancement over previous detectors.
- We demonstrate the feasibility and applicability of the KVT-LPR’s practically deployed detection performance in different settings across two datasets (i.e., a custom dataset and a publicly open dataset) and two target platforms (i.e., from a high-end to an embedded solution).
2. Related Work
3. Proposed Methodology
3.1. YOLOv4-Based Vehicle Type and License Plate Recognition
3.2. Dataset Collection and Preprocessing
3.2.1. Vehicle Types and LPs
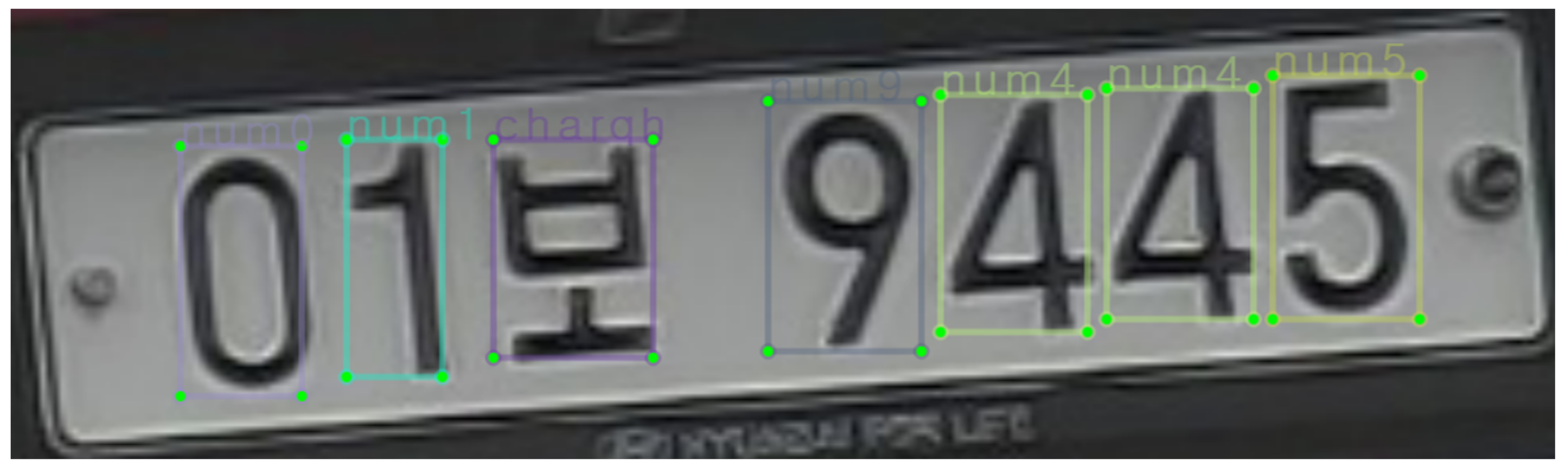
3.2.2. LP Numbers and Characters
4. Experiments
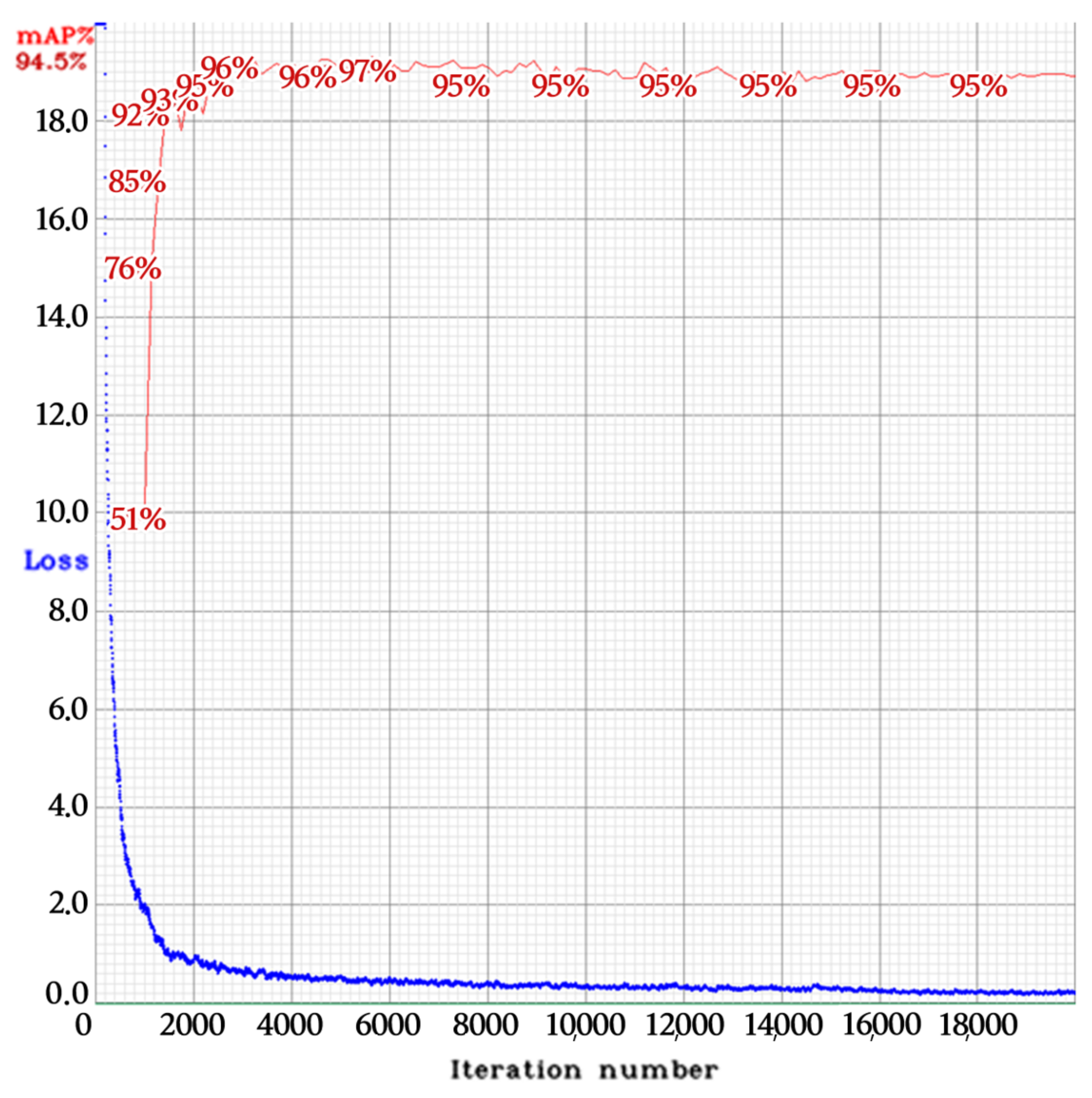
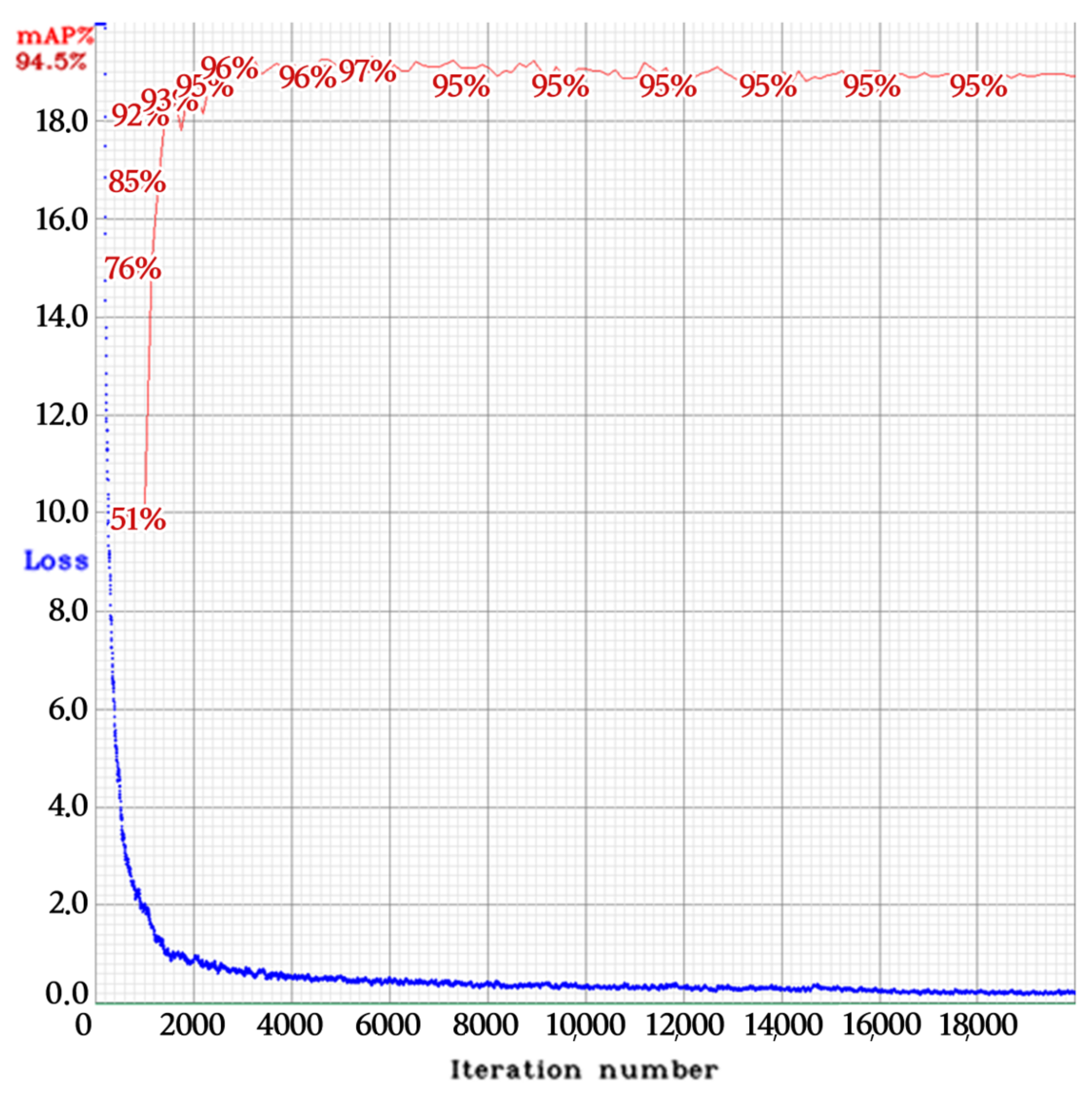
4.1. Implementation
4.2. Minimum Detectable LP Size
4.3. Detection Speed
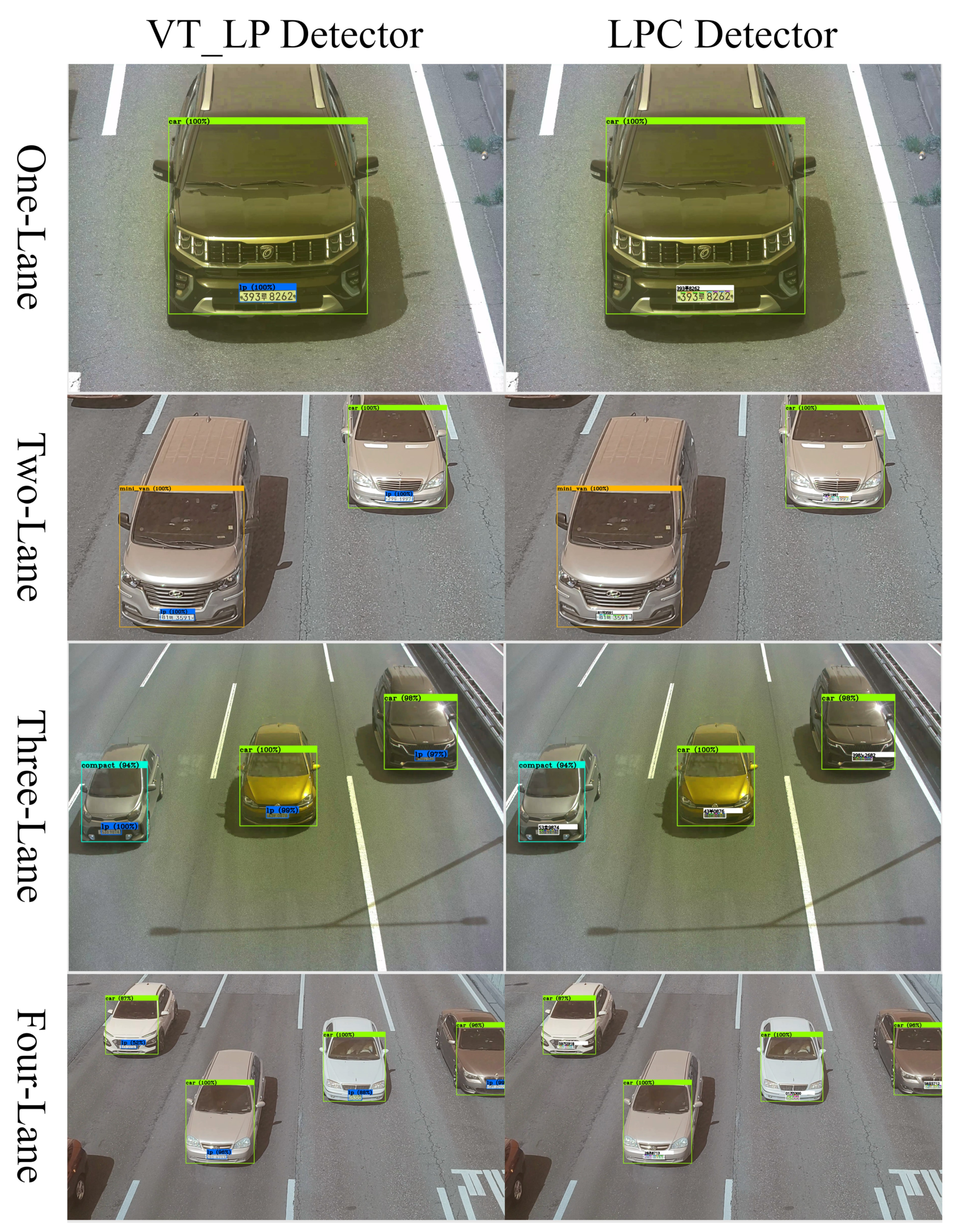
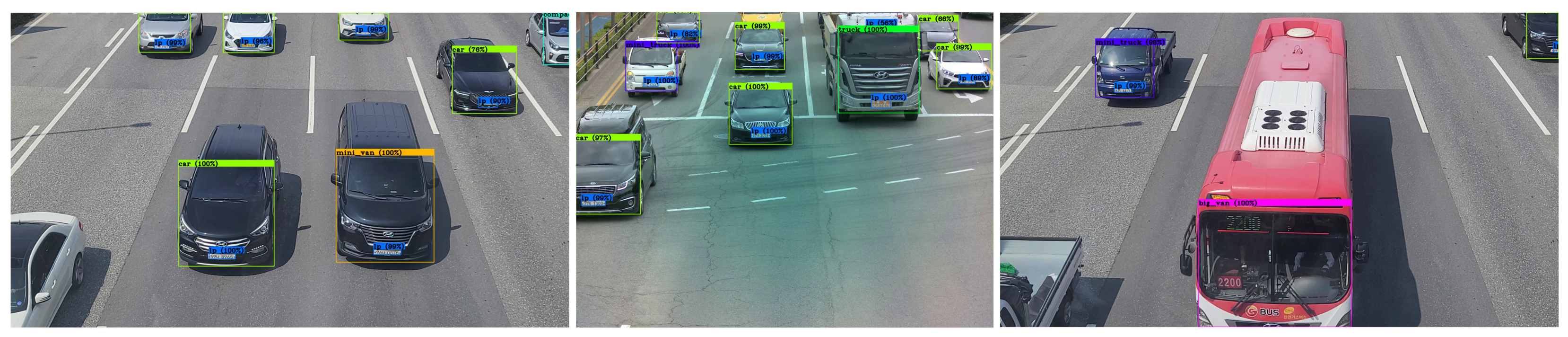
4.4. Vehicle Type and LP Detection Performance
4.5. License Plate Recognition Performance
4.6. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
References
- Gharaibeh, A.; Salahuddin, M.A.; Hussini, S.J.; Khreishah, A.; Khalil, I.; Guizani, M.; Al-Fuqaha, A. Smart Cities: A Survey on Data Management, Security, and Enabling Technologies. IEEE Commun. Surv. Tutor. 2017, 19, 2456–2501. [Google Scholar] [CrossRef]
- Winkler, T.; Rinner, B. Security and Privacy Protection in Visual Sensor Networks: A Survey. ACM Comput. Surv. 2014, 47, 2. [Google Scholar] [CrossRef]
- Baran, R.; Rusc, T.; Fornalski, P. A smart camera for the surveillance of vehicles in intelligent transportation systems. Multimed. Tools Appl. 2016, 75, 10471–10493. [Google Scholar] [CrossRef] [Green Version]
- Won, M. Intelligent Traffic Monitoring Systems for Vehicle Classification: A Survey. IEEE Access 2020, 8, 73340–73358. [Google Scholar] [CrossRef]
- Liu, L.; Ouyang, W.; Wang, X.; Fieguth, P.; Chen, J.; Liu, X.; Pietikäinen, M. Deep learning for generic object detection: A survey. Int. J. Comput. Vis. 2020, 128, 261–318. [Google Scholar] [CrossRef] [Green Version]
- Anagnostopoulos, C.E.; Anagnostopoulos, I.E.; Psoroulas, I.D.; Loumos, V.; Kayafas, E. License Plate Recognition From Still Images and Video Sequences: A Survey. IEEE Trans. Intell. Transp. Syst. 2008, 9, 377–391. [Google Scholar] [CrossRef]
- Shashirangana, J.; Padmasiri, H.; Meedeniya, D.; Perera, C. Automated License Plate Recognition: A Survey on Methods and Techniques. IEEE Access 2020, 9, 11203–11225. [Google Scholar] [CrossRef]
- Du, S.; Ibrahim, M.; Shehata, M.; Badawy, W. Automatic license plate recognition (ALPR): A state-of-the-art review. IEEE Trans. Circuits Syst. Video Technol. 2013, 23, 311–325. [Google Scholar] [CrossRef]
- Hsieh, J.; Chen, L.; Chen, D. Symmetrical SURF and Its Applications to Vehicle Detection and Vehicle Make and Model Recognition. IEEE Trans. Intell. Transp. Syst. 2014, 15, 6–20. [Google Scholar] [CrossRef]
- Siddiqui, A.J.; Mammeri, A.; Boukerche, A. Real-Time Vehicle Make and Model Recognition Based on a Bag of SURF Features. IEEE Trans. Intell. Transp. Syst. 2016, 17, 3205–3219. [Google Scholar] [CrossRef]
- Manzoor, M.A.; Morgan, Y.; Bais, A. Real-Time Vehicle Make and Model Recognition System. Mach. Learn. Knowl. Extr. 2019, 1, 611–629. [Google Scholar] [CrossRef] [Green Version]
- Bochkovskiy, A.; Wang, C.-Y.; Liao, H.-Y.M. Yolov4: Optimal speed and accuracy of object detection. arXiv 2020, arXiv:2004.10934. [Google Scholar]
- Liu, W.; Anguelov, D.; Erhan, D.; Szegedy, C.; Reed, S.; Fu, C.-Y.; Berg, A.C. SSD: Single shot MultiBox detector. In Proceedings of the European Conference on Computer Vision, Amsterdam, The Netherlands, 11–14 October 2016; Springer International Publishing: Cham, Switzerland, 2016; pp. 21–37. [Google Scholar]
- Redmon, J.; Divvala, S.; Girshick, R.; Farhadi, A. You only look once: Unified, real-time object detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 779–788. [Google Scholar]
- Redmon, J.; Farhadi, A. YOLO9000: Better, faster, stronger. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017. [Google Scholar]
- Redmon, J.; Farhadi, A. Yolov3: An incremental improvement. arXiv 2018, arXiv:1804.02767. [Google Scholar]
- Hendry; Chen, R.-C. Automatic license plate recognition via sliding-window darknet-YOLO deep learning. Image Vis Comput. 2019, 87, 47–56. [Google Scholar] [CrossRef]
- Laroca, R.; Zanlorensi, L.A.; Gonçalves, G.R.; Todt, E.; Schwartz, W.R.; Menotti, D. An efficient and layout-independent automatic license plate recognition system based on the YOLO detector. IET Intell. Transp. Syst. 2021, 15, 483–503. [Google Scholar] [CrossRef]
- Castro-Zunti, R.D.; Yépez, J.; Ko, S.-B. License plate segmentation and recognition system using deep learning and OpenVINO. IET Intell. Transp. Syst. 2020, 14, 119–126. [Google Scholar] [CrossRef]
- Han, B.-G.; Lee, J.T.; Lim, K.-T.; Chung, Y. Real-time license plate detection in high-resolution videos using fastest available cascade classifier and core patterns. ETRI J. 2015, 37, 251–261. [Google Scholar] [CrossRef]
- Park, S.; Yoon, H.; Park, S. Multi-style license plate recognition system using k-nearest neighbors. KSII Trans. Internet Inf. Syst. (TIIS) 2019, 13, 2509–2528. [Google Scholar]
- Kim, K.-J.; Kim, P.-K.; Chung, Y.-S.; Choi, D.-H. Multi-scale detector for accurate vehicle detection in traffic surveillance data. IEEE Access 2019, 7, 78311–78319. [Google Scholar] [CrossRef]
- Henry, C.; Ahn, S.Y.; Lee, S.-W. Multinational license plate recognition using generalized character sequence detection. IEEE Access 2020, 8, 35185–35199. [Google Scholar] [CrossRef]
- Sung, J.-Y.; Yu, S.-B.; Park, S.-H. Real-time automatic license plate recognition system using YOLOv4. In Proceedings of the 2020 IEEE International Conference on Consumer Electronics-Asia (ICCE-Asia), Seoul, Korea, 1–3 November 2020. [Google Scholar]
- Kim, J.-A.; Sung, J.-Y.; Park, S.-H. Comparison of faster-RCNN, YOLO, and SSD for real-time vehicle type recognition. In Proceedings of the 2020 IEEE International Conference on Consumer Electronics-Asia (ICCE-Asia), Seoul, Korea, 1–3 November 2020. [Google Scholar]
- Han, B.-G.; Lee, J.T.; Lim, K.-T.; Choi, D.-H. License plate image generation using generative adversarial networks for end-to-end license plate character recognition from a small set of real images. Appl. Sci. 2020, 10, 2780. [Google Scholar] [CrossRef] [Green Version]
- Wang, H.; Li, Y.; Dang, L.-M.; Moon, H. Robust Korean license plate recognition based on deep neural networks. Sensors 2021, 21, 4140. [Google Scholar] [CrossRef]
- Lim, D.; Park, D. AI analysis of illegal parking data at Seocho city. In Data Science and Digital Transformation in the Fourth Industrial Revolution, Studies in Computational Intelligence; Springer: Cham, Switzerland, 2021; Volume 929, pp. 165–178. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| System | Approach | Dataset (Resolution) | Korean LP | Multilanes | Small LP | Vehicle Type | Embedded Platform |
|---|---|---|---|---|---|---|---|
| Han et al. (2015) [20] | Cascade Structure | Custom (1624 × 1224) | O | X | X | X | X |
| Park et al. (2019) [21] | KNN | Custom (1920 × 1080) | O | X | X | X | X |
| Kim et al. (2019) [22] | YOLOv3 | UA-DETRAC (960 × 540) | X | O | X | X | X |
| Henry et al. (2020) [23] | YOLOv3 | KarPlate (1920 × 1080) | O | X | X | X | X |
| Sung et al. (2020) [24] | YOLOv3 | KETI-ALPR (3840 × 2160) | O | X | O | X | O |
| Kim et al. (2020) [25] | Faster-RCNN, YOLOv4, SSD | Custom (N/A) | X | X | X | O | X |
| Han et al. (2020) [26] | LP-GAN, YOLOv2 | Real + Synthetic (N/A) | X | X | X | X | X |
| Wang et al. (2021) [27] | YOLOv5, WPOD-NET | KarPlate (1920 × 1080) | O | X | O | X | X |
| Lim and Park (2021) [28] | DNN | CCTV images (N/A) | O | X | X | X | X |
| Proposed (2021) | Two phase YOLOv4 | Custom (3840 × 2160) | O | O | O | O | O |
| Classes | Multilanes | ||||
|---|---|---|---|---|---|
| Two | Three | Four | Total | Ratio (%) | |
| License Plate | 4063 | 2411 | 374 | 6878 | 57.1 |
| Car | 1757 | 1159 | 230 | 3146 | 26.1 |
| Mini Truck | 563 | 275 | 41 | 879 | 7.3 |
| Compact | 292 | 170 | 38 | 500 | 4.2 |
| Mini Van | 282 | 97 | 15 | 394 | 3.3 |
| Truck | 110 | 59 | 12 | 181 | 1.5 |
| Bus | 48 | 13 | 5 | 66 | 0.6 |
| Total | 7115 | 4184 | 715 | 12,044 | 100.0 |
| Class | Character | Training | Validation | Test | Total |
|---|---|---|---|---|---|
| 0 | 0 | 4560 | 871 | 686 | 6117 |
| 1 | 1 | 4978 | 966 | 744 | 6688 |
| 2 | 2 | 3850 | 680 | 583 | 5113 |
| 3 | 3 | 4171 | 789 | 608 | 5568 |
| 4 | 4 | 3644 | 657 | 510 | 4811 |
| 5 | 5 | 3775 | 718 | 558 | 5051 |
| 6 | 6 | 3431 | 598 | 510 | 4539 |
| 7 | 7 | 3544 | 710 | 487 | 4741 |
| 8 | 8 | 3449 | 635 | 473 | 4557 |
| 9 | 9 | 3081 | 577 | 434 | 4092 |
| Total | 38,483 | 7201 | 5593 | 51,277 | |
| Class | Character | Training | Validation | Test | Total |
|---|---|---|---|---|---|
| 10 | 가 (Ga) | 137 | 31 | 25 | 193 |
| 11 | 거 (Geo) | 150 | 36 | 26 | 212 |
| 12 | 고 (Go) | 145 | 35 | 27 | 207 |
| 13 | 구 (Gu) | 140 | 32 | 24 | 196 |
| 14 | 나 (Na) | 151 | 35 | 26 | 212 |
| 15 | 너 (Neo) | 151 | 35 | 27 | 213 |
| 16 | 노 (No) | 141 | 31 | 26 | 198 |
| 17 | 누 (Nu) | 144 | 32 | 26 | 202 |
| 18 | 다 (Da) | 142 | 32 | 25 | 199 |
| 19 | 더 (Deo) | 145 | 35 | 24 | 204 |
| 20 | 도 (Do) | 142 | 32 | 26 | 200 |
| 21 | 두 (Du) | 180 | 28 | 21 | 229 |
| 22 | 라 (Ra) | 140 | 31 | 25 | 196 |
| 23 | 러 (Reo) | 173 | 26 | 20 | 219 |
| 24 | 로 (Ro) | 136 | 28 | 21 | 185 |
| 25 | 루 (Ru) | 217 | 35 | 27 | 279 |
| 26 | 마 (Ma) | 185 | 26 | 20 | 231 |
| 27 | 머 (Meo) | 154 | 35 | 27 | 216 |
| 28 | 모 (Mo) | 182 | 26 | 20 | 228 |
| 29 | 무 (Mu) | 153 | 35 | 27 | 215 |
| 30 | 바 (Ba) | 656 | 168 | 120 | 944 |
| 31 | 배 (Bae) | 33 | 10 | 6 | 49 |
| 32 | 버 (Beo) | 141 | 32 | 26 | 199 |
| 33 | 보 (Bo) | 164 | 19 | 16 | 199 |
| 34 | 부 (Bu) | 163 | 15 | 13 | 191 |
| 35 | 사 (Sa) | 106 | 27 | 21 | 154 |
| 36 | 서 (Seo) | 126 | 11 | 9 | 146 |
| 37 | 소 (So) | 124 | 12 | 9 | 145 |
| 38 | 수 (Su) | 115 | 13 | 11 | 139 |
| 39 | 아 (A) | 259 | 52 | 46 | 357 |
| 40 | 어 (Eo) | 115 | 18 | 15 | 148 |
| 41 | 영 (Yeong) | 54 | 12 | 9 | 75 |
| 42 | 오 (O) | 124 | 17 | 15 | 156 |
| 43 | 우 (U) | 132 | 8 | 8 | 148 |
| 44 | 자 (Ja) | 264 | 53 | 37 | 354 |
| 45 | 저 (Jeo) | 116 | 14 | 12 | 142 |
| 46 | 조 (Jo) | 115 | 16 | 11 | 142 |
| 47 | 주 (Ju) | 137 | 13 | 10 | 160 |
| 48 | 하 (Ha) | 125 | 15 | 13 | 153 |
| 49 | 허 (Heo) | 117 | 17 | 17 | 151 |
| 50 | 호 (Ho) | 134 | 32 | 19 | 185 |
| 51 | 강원 (Gangwon) | 136 | 35 | 22 | 193 |
| 52 | 경기 (Gyeonggi) | 187 | 44 | 38 | 269 |
| 53 | 경남 (Gyeongnam) | 106 | 25 | 16 | 147 |
| 54 | 경북 (Gyeongbuk) | 51 | 11 | 9 | 71 |
| 55 | 광주 (Gwangju) | 5 | 0 | 0 | 5 |
| 56 | 대구 (Daegu) | 98 | 22 | 16 | 136 |
| 57 | 대전 (Daejeon) | 0 | 0 | 0 | 0 |
| 58 | 부산 (Busan) | 20 | 5 | 3 | 28 |
| 59 | 서울 (Seoul) | 283 | 67 | 52 | 402 |
| 60 | 세종 (Sejong) | 0 | 0 | 0 | 0 |
| 61 | 울산 (Ulsan) | 3 | 0 | 0 | 3 |
| 62 | 인천 (Incheon) | 165 | 39 | 29 | 233 |
| 63 | 전남 (Jeonnam) | 5 | 0 | 1 | 6 |
| 64 | 전북 (Jeonbuk) | 3 | 0 | 0 | 3 |
| 65 | 충남 (Chungnam) | 331 | 76 | 60 | 467 |
| 66 | 충북 (Chungbuk) | 11 | 1 | 1 | 13 |
| 67 | 제주 (Jeju) | 0 | 0 | 0 | 0 |
| Total | 7832 | 1535 | 1180 | 10,547 | |
| One-Lane | Two-Lane | Three-Lane | Four-Lane | |||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Single-Line LP | Double-Line LP | Single-Line LP | Double-Line LP | Single-Line LP | Double-Line LP | Single-Line LP | Double-Line LP | |||||||||
| Width | Height | Width | Height | Width | Height | Width | Height | Width | Height | Width | Height | Width | Height | Width | Height | |
| 1 | 286 | 94 | 250 | 137 | 149 | 49 | 119 | 72 | 96 | 32 | 102 | 36 | 113 | 36 | 106 | 59 |
| 2 | 309 | 34 | 258 | 149 | 159 | 48 | 125 | 70 | 96 | 25 | 102 | 44 | 113 | 36 | 106 | 43 |
| 3 | 364 | 90 | 258 | 137 | 164 | 40 | 133 | 75 | 97 | 32 | 102 | 59 | 115 | 35 | 106 | 51 |
| 4 | 372 | 54 | 261 | 140 | 164 | 34 | 133 | 65 | 99 | 22 | 102 | 54 | 115 | 33 | 108 | 52 |
| 5 | 372 | 87 | 262 | 138 | 165 | 36 | 133 | 77 | 99 | 26 | 102 | 50 | 118 | 35 | 108 | 58 |
| 6 | 374 | 96 | 262 | 143 | 165 | 38 | 134 | 75 | 100 | 30 | 102 | 44 | 118 | 32 | 111 | 44 |
| 7 | 378 | 90 | 266 | 126 | 166 | 38 | 136 | 65 | 100 | 25 | 102 | 50 | 119 | 35 | 112 | 65 |
| 8 | 382 | 35 | 267 | 133 | 166 | 44 | 137 | 75 | 100 | 26 | 102 | 46 | 119 | 37 | 116 | 54 |
| 9 | 384 | 81 | 270 | 142 | 166 | 27 | 137 | 68 | 101 | 27 | 103 | 55 | 119 | 35 | 116 | 67 |
| 10 | 384 | 89 | 270 | 147 | 166 | 37 | 137 | 70 | 101 | 26 | 103 | 53 | 119 | 35 | 117 | 62 |
| 11 | 384 | 96 | 272 | 119 | 167 | 32 | 139 | 73 | 101 | 27 | 103 | 41 | 120 | 37 | 117 | 54 |
| 12 | 387 | 52 | 273 | 118 | 167 | 38 | 140 | 68 | 101 | 26 | 103 | 55 | 120 | 27 | 118 | 44 |
| 13 | 388 | 89 | 274 | 153 | 168 | 33 | 140 | 70 | 101 | 16 | 103 | 52 | 121 | 35 | 119 | 75 |
| 14 | 391 | 95 | 276 | 156 | 169 | 34 | 140 | 67 | 102 | 32 | 103 | 56 | 121 | 34 | 119 | 58 |
| 15 | 391 | 89 | 278 | 155 | 169 | 41 | 140 | 69 | 102 | 33 | 103 | 37 | 121 | 35 | 119 | 60 |
| 16 | 392 | 84 | 278 | 156 | 170 | 39 | 140 | 63 | 102 | 29 | 103 | 54 | 121 | 37 | 122 | 75 |
| 17 | 393 | 98 | 280 | 136 | 170 | 35 | 141 | 75 | 104 | 27 | 103 | 57 | 121 | 34 | 122 | 65 |
| 18 | 393 | 91 | 280 | 143 | 170 | 35 | 141 | 68 | 104 | 21 | 103 | 52 | 121 | 36 | 123 | 64 |
| 19 | 395 | 95 | 280 | 151 | 170 | 40 | 142 | 90 | 104 | 28 | 103 | 51 | 121 | 29 | 124 | 71 |
| 20 | 395 | 65 | 280 | 152 | 171 | 38 | 143 | 71 | 104 | 27 | 103 | 48 | 122 | 32 | 124 | 58 |
| Average | 408 | 89 | 304 | 155 | 176 | 39 | 153 | 73 | 108 | 27 | 105 | 54 | 126 | 35 | 140 | 69 |
| One-Lane | Two-Lane | Three-Lane | Four-Lane | |||||
|---|---|---|---|---|---|---|---|---|
| Elapsed Time (ms) | FPS | Elapsed Time (ms) | FPS | Elapsed Time (ms) | FPS | Elapsed Time (ms) | FPS | |
| VT_LP detector | 7.16 | 139.71 | 7.28 | 137.34 | 7.99 | 125.08 | 8.33 | 120.10 |
| LPC detector | 17.70 | 56.51 | 29.81 | 33.55 | 44.22 | 22.62 | 54.42 | 18.38 |
| One-Lane | Two-Lane | Three-Lane | Four-Lane | |||||
|---|---|---|---|---|---|---|---|---|
| Elapsed Time (ms) | FPS | Elapsed Time (ms) | FPS | Elapsed Time (ms) | FPS | Elapsed Time (ms) | FPS | |
| VT_LP detector | 60.68 | 16.48 | 61.74 | 16.20 | 63.35 | 15.79 | 64.25 | 15.56 |
| LPC detector | 133.44 | 7.49 | 220.26 | 4.54 | 309.44 | 3.23 | 375.08 | 2.67 |
| Class | Average Precision | |||
|---|---|---|---|---|
| One-Lane | Two-Lane | Three-Lane | Four-Lane | |
| License Plate | 99.4 | 99.9 | 98.1 | 95.2 |
| Car | 99.9 | 93.9 | 94.5 | 95.0 |
| Mini Truck | 99.4 | 99.6 | 97.2 | 98.4 |
| Compact | 87.5 | 75.0 | 98.1 | 75.0 |
| Mini Van | 99.4 | 90.0 | 94.6 | 69.4 |
| Truck | 100.0 | 100.0 | 100.0 | 75.0 |
| Bus | 100.0 | 100.0 | 100.0 | 100.0 |
| mAP | 98.0 | 94.0 | 97.1 | 84.6 |
| One-Lane | Two-Lane | Three-Lane | Four-Lane | |
|---|---|---|---|---|
| Precision | 0.98 | 0.92 | 0.92 | 0.87 |
| Recall | 0.99 | 0.97 | 0.98 | 0.94 |
| F1-score | 0.99 | 0.95 | 0.95 | 0.90 |
| Average IOU (%) | 90.3 | 87.5 | 90.8 | 77.8 |
| Our Dataset | AI-Hub Dataset | |
|---|---|---|
| Precision | 0.99 | 1.00 |
| Recall | 1.00 | 1.00 |
| F1-Score | 0.99 | 1.00 |
| Average IOU (%) | 92.84 | 99.41 |
| Class | Our Dataset | AI-Hub Dataset | ||||
|---|---|---|---|---|---|---|
| AP | TP | FP | AP | TP | FP | |
| 0 | 99.65 | 868 | 2 | 99.93 | 4470 | 3 |
| 1 | 99.82 | 965 | 14 | 99.94 | 5538 | 11 |
| 2 | 99.83 | 679 | 4 | 99.83 | 5051 | 26 |
| 3 | 99.87 | 788 | 4 | 99.95 | 5599 | 9 |
| 4 | 99.40 | 654 | 3 | 99.76 | 4451 | 5 |
| 5 | 98.68 | 718 | 8 | 98.80 | 4724 | 4 |
| 6 | 99.83 | 597 | 0 | 99.87 | 4742 | 5 |
| 7 | 99.86 | 709 | 9 | 99.80 | 4421 | 22 |
| 8 | 100.00 | 635 | 0 | 99.94 | 4824 | 6 |
| 9 | 99.83 | 575 | 1 | 99.86 | 4186 | 0 |
| 가 (Ga) | 100.00 | 31 | 2 | 99.90 | 198 | 0 |
| 거 (Geo) | 97.07 | 34 | 0 | 98.49 | 197 | 5 |
| 고 (Go) | 100.00 | 35 | 1 | 99.00 | 198 | 0 |
| 구 (Gu) | 100.00 | 32 | 0 | 97.50 | 195 | 0 |
| 나 (Na) | 97.14 | 34 | 0 | 100.00 | 199 | 0 |
| 너 (Neo) | 99.68 | 35 | 1 | 99.99 | 200 | 3 |
| 노 (No) | 96.77 | 30 | 1 | 98.96 | 197 | 2 |
| 누 (Nu) | 100.00 | 32 | 0 | 98.51 | 198 | 0 |
| 다 (Da) | 100.00 | 32 | 0 | 99.49 | 199 | 2 |
| 더 (Deo) | 97.06 | 33 | 0 | 96.50 | 193 | 0 |
| 도 (Do) | 100.00 | 32 | 2 | 98.50 | 197 | 3 |
| 두 (Du) | 100.00 | 28 | 0 | 99.85 | 200 | 10 |
| 라 (Ra) | 100.00 | 31 | 0 | 100.00 | 198 | 0 |
| 러 (Reo) | 100.00 | 26 | 0 | 99.47 | 196 | 6 |
| 로 (Ro) | 89.70 | 25 | 11 | 96.26 | 193 | 2 |
| 루 (Ru) | 92.14 | 32 | 9 | 98.92 | 198 | 13 |
| 마 (Ma) | 100.00 | 26 | 0 | 99.00 | 198 | 1 |
| 머 (Meo) | 99.86 | 35 | 0 | 96.05 | 195 | 4 |
| 모 (Mo) | 100.00 | 25 | 0 | 98.79 | 197 | 3 |
| 무 (Mu) | 100.00 | 35 | 0 | 98.17 | 197 | 1 |
| 바 (Ba) | 100.00 | 168 | 1 | 98.80 | 249 | 2 |
| 배 (Bae) | 100.00 | 10 | 0 | 0 | 0 | 0 |
| 버 (Beo) | 100.00 | 32 | 0 | 99.99 | 200 | 4 |
| 보 (Bo) | 100.00 | 19 | 0 | 99.99 | 200 | 4 |
| 부 (Bu) | 100.00 | 15 | 0 | 99.99 | 201 | 5 |
| 사 (Sa) | 99.87 | 26 | 0 | 93.73 | 198 | 2 |
| 서 (Seo) | 100.00 | 11 | 0 | 99.98 | 200 | 22 |
| 소 (So) | 100.00 | 12 | 0 | 99.99 | 199 | 4 |
| 수 (Su) | 100.00 | 13 | 0 | 99.99 | 200 | 4 |
| 아 (A) | 100.00 | 52 | 0 | 97.13 | 203 | 0 |
| 어 (Eo) | 100.00 | 18 | 0 | 96.96 | 193 | 3 |
| 영 (Yeong) | 98.81 | 11 | 2 | 0 | 0 | 0 |
| 오 (O) | 100.00 | 17 | 0 | 97.66 | 198 | 17 |
| 우 (U) | 100.00 | 8 | 0 | 98.99 | 197 | 1 |
| 자 (Ja) | 100.00 | 53 | 0 | 90.04 | 208 | 0 |
| 저 (Jeo) | 100.00 | 14 | 0 | 97.84 | 198 | 25 |
| 조 (Jo) | 100.00 | 16 | 0 | 100 | 201 | 0 |
| 주 (Ju) | 100.00 | 13 | 0 | 98.48 | 195 | 0 |
| 하 (Ha) | 100.00 | 15 | 0 | 99.48 | 200 | 2 |
| 허 (Heo) | 100.00 | 17 | 0 | 99.31 | 198 | 7 |
| 호 (Ho) | 100.00 | 32 | 0 | 89.59 | 178 | 1 |
| 강원 (Gangwon) | 97.14 | 34 | 0 | 0 | 0 | 0 |
| 경기 (Gyeonggi) | 100.00 | 44 | 3 | 96.36 | 159 | 0 |
| 경남 (Gyeongnam) | 99.70 | 24 | 1 | 0 | 0 | 0 |
| 경북 (Gyeongbuk) | 100.00 | 11 | 0 | 0 | 0 | 0 |
| 광주 (Gwangju) | 0 | 0 | 0 | 0 | 0 | 0 |
| 대구 (Daegu) | 100.00 | 22 | 0 | 0 | 0 | 0 |
| 대전 (Daejeon) | 0 | 0 | 0 | 0 | 0 | 0 |
| 부산 (Busan) | 100.00 | 5 | 0 | 0 | 0 | 0 |
| 서울 (Seoul) | 99.98 | 66 | 1 | 97.83 | 724 | 2 |
| 세종 (Sejong) | 0 | 0 | 0 | 0 | 0 | 0 |
| 울산 (Ulsan) | 0 | 0 | 0 | 0 | 0 | 0 |
| 인천 (Incheon) | 100.00 | 39 | 0 | 0 | 0 | 0 |
| 전남 (Jeonnam) | 0 | 0 | 0 | 0 | 0 | 0 |
| 전북 (Jeonbuk) | 0 | 0 | 0 | 0 | 0 | 0 |
| 충남 (Chungnam) | 96.00 | 74 | 3 | 0 | 0 | 0 |
| 충북 (Chungbuk) | 100.00 | 1 | 0 | 0 | 0 | 0 |
| 제주 (Jeju) | 0 | 0 | 0 | 0 | 0 | 0 |
| Total | 89.08 | 8703 | 83 | 73.87 | 56,648 | 251 |
| Adjusted | 99.30 | 8703 | 83 | 99.41 | 56,648 | 251 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Park, S.-H.; Yu, S.-B.; Kim, J.-A.; Yoon, H. An All-in-One Vehicle Type and License Plate Recognition System Using YOLOv4. Sensors 2022, 22, 921. https://doi.org/10.3390/s22030921
Park S-H, Yu S-B, Kim J-A, Yoon H. An All-in-One Vehicle Type and License Plate Recognition System Using YOLOv4. Sensors. 2022; 22(3):921. https://doi.org/10.3390/s22030921
Chicago/Turabian StylePark, Se-Ho, Saet-Byeol Yu, Jeong-Ah Kim, and Hyoseok Yoon. 2022. "An All-in-One Vehicle Type and License Plate Recognition System Using YOLOv4" Sensors 22, no. 3: 921. https://doi.org/10.3390/s22030921
APA StylePark, S.-H., Yu, S.-B., Kim, J.-A., & Yoon, H. (2022). An All-in-One Vehicle Type and License Plate Recognition System Using YOLOv4. Sensors, 22(3), 921. https://doi.org/10.3390/s22030921