
Node Calibration in UWB-Based RTLSs Using Multiple Simultaneous Ranging


Abstract
1. Introduction
- It simultaneously measures the position and antenna delay values of anchor nodes in a UWB-based RTLS.
- It does not require a reference system of predefined coordinates for placement coordination among anchor nodes.
- The measurement process does not require clock synchronization of the UWB nodes.
2. Node Calibration System
2.1. Principle
2.2. Linearization via Taylor Series
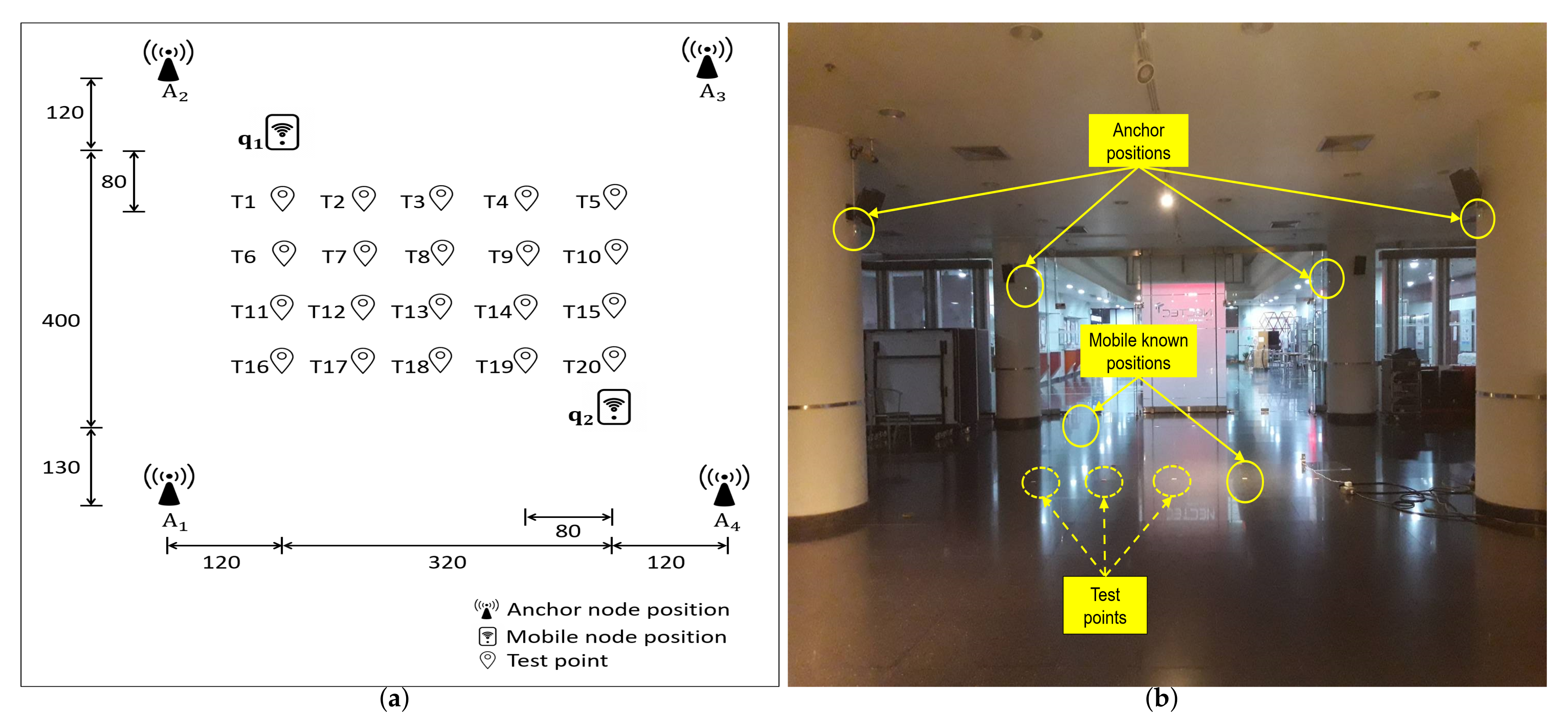
2.3. System Design and Implementation
- Step 1:
- Place each of the anchor nodes (powered) at their respective locations, .
- Step 2:
- Identify the known positions of mobile nodes, , such that they have a clear LOS with the anchor nodes and .
- Step 3:
- Session-data collection at mobile node positions, ).
- Step 3.1:
- Place the mobile node at the k-th position.
- Step 3.2:
- The PC requests the start of sensing sessions from the master node.
- Step 3.3:
- The master node initiates a sensing session based on MSR, where it assigns to transmit the first and third sensing packets, to transmit the second sensing packet, and to listen to the three sensing packets. The master node then collects the session-data from each respective node after a successful sensing session. The process of Step 3.3 is repeated for sensing sessions, and the sets of session-data are stored in the PC as a log file.
- Step 3.4:
- The process of Step 3.2 to Step 3.3 is repeated until 1000 sets of log files have been stored in the PC.
- Step 4:
- The processing of the session-data is performed at the PC, where the xyz-coordinates of unknown positions of the anchor nodes and the antenna-delay-induced length of the anchor nodes and the mobile node are estimated as the TSLS solutions of (17).
3. Numerical Results
3.1. Experimental Evaluation
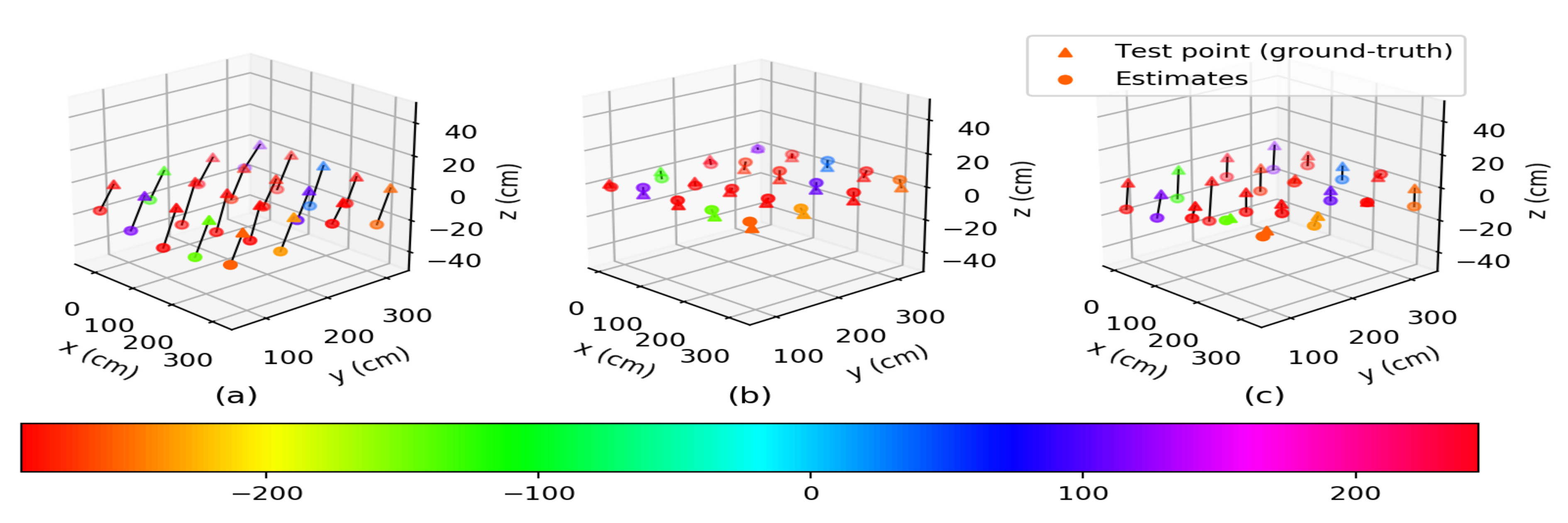
3.1.1. Numerical Results for AltDS-TWR
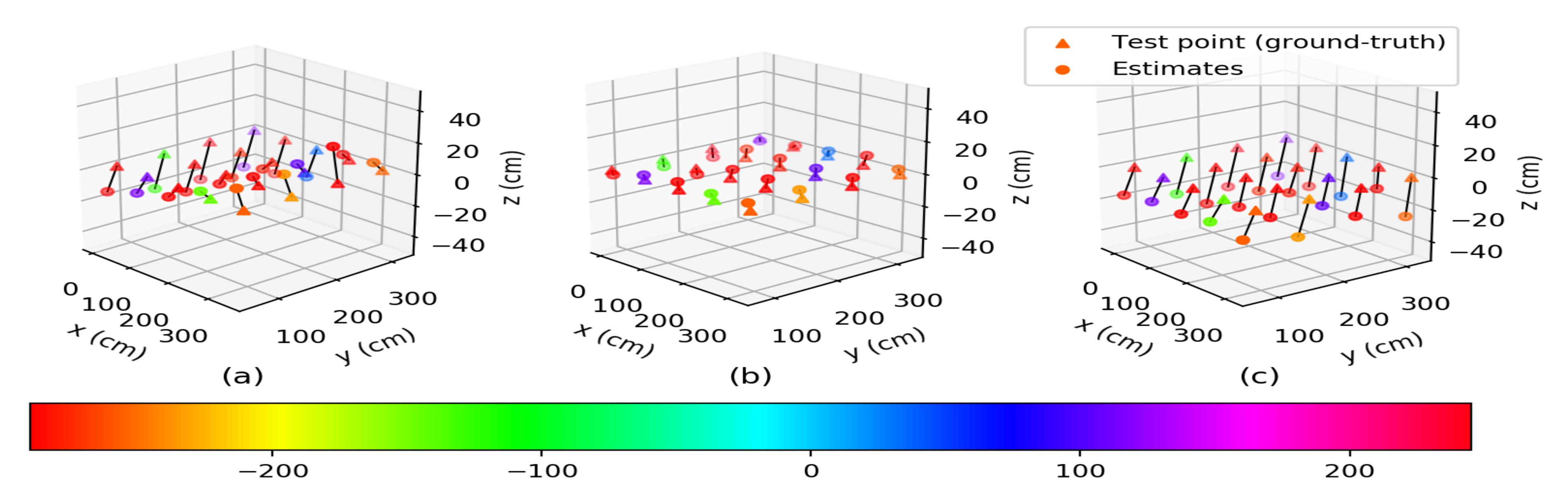
3.1.2. Numerical Results for MSR
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Ferreira, A.F.G.; Fernandes, D.M.A.; Catarino, A.P.; Monteiro, J.L. Localization and Positioning Systems for Emergency Responders: A Survey. IEEE Commun. Surv. Tutor. 2017, 19, 2836–2870. [Google Scholar] [CrossRef]
- Liu, Z.; Cheng, L.; Liu, A.; Zhang, L.; He, X.; Zimmermann, R. Multiview and Multimodal Pervasive Indoor Localization. In Proceedings of the 25th ACM International Conference on Multimedia (MM’17), New York, NY, USA, 19 October 2017; pp. 109–117. [Google Scholar]
- Wan, S.; Wen, L.; Han, J.; Song, L.; Zhang, Q.; Li, K.; Li, Z.; Zhang, W.; Zhang, B.; You, X.; et al. An Automated Real-Time Localization System in Highway and Tunnel Using UWB DL-TDoA Technology. Wirel. Commun. Mob. Comput. 2020, 2020, 8877654. [Google Scholar] [CrossRef]
- Gandhi, G.M.; Rama, P. GPS based Multi-hop Communication with Localization in Subterranean Wireless Sensor Networks. Procedia Comput. Sci. 2015, 57, 1189–1198. [Google Scholar] [CrossRef]
- Du, H.; Zhang, C.; Ye, Q.; Xu, W.; Kibenge, P.L.; Yao, K. A hybrid outdoor localization scheme with high-position accuracy and low-power consumption. EURASIP J. Wirel. Commun. Netw. 2018, 2018, 4. [Google Scholar] [CrossRef]
- Yassin, A.; Nasser, Y.; Awad, M.; Al-Dubai, A.; Liu, R.; Yuen, C.; Raulefs, R.; Aboutanios, E. Recent Advances in Indoor Localization: A Survey on Theoretical Approaches and Applications. IEEE Commun. Surv. Tutor. 2017, 19, 1327–1346. [Google Scholar] [CrossRef]
- Zafari, F.; Gkelias, A.; Leung, K.K. A Survey of Indoor Localization Systems and Technologies. IEEE Commun. Surv. Tutor. 2019, 21, 2568–2599. [Google Scholar] [CrossRef]
- Queralta, J.P.; Almansa, C.M.; Schiano, F.; Floreano, D.; Westerlund, T. UWB-based system for UAV Localization in GNSS-Denied Environments: Characterization and Dataset. arXiv 2020, arXiv:2003.04380. [Google Scholar]
- Seco, F.; Jimenez, A.R.; Prieto, C.; Roa, J.; Koutsou, K. A survey of mathematical methods for indoor localization. In Proceedings of the 2009 IEEE International Symposium on Intelligent Signal Processing, Budapest, Hungary, 26–28 August 2009; pp. 9–14. [Google Scholar] [CrossRef]
- Xiao, J.; Zhou, Z.; Yi, Y.; Ni, L.M. A Survey on Wireless Indoor Localization from the Device Perspective. ACM Comput. Surv. 2016, 49, 1–31. [Google Scholar] [CrossRef]
- Alarifi, A.; Al-Salman, A.; Alsaleh, M.; Alnafessah, A.; Al-Hadhrami, S.; Al-Ammar, M.A.; Al-Khalifa, H.S. Ultra Wideband Indoor Positioning Technologies: Analysis and Recent Advances. Sensors 2016, 16, 707. [Google Scholar] [CrossRef]
- Chintalapudi, K.; Padmanabha Iyer, A.; Padmanabhan, V.N. Indoor localization without the pain. In Proceedings of the 16th Annual International Conference on Mobile Computing and Networking, MOBICOM 2010, Chicago, IL, USA, 20–24 September 2010; pp. 173–184. [Google Scholar]
- Faragher, R.; Harle, R. Location Fingerprinting with Bluetooth Low Energy Beacons. IEEE J. Sel. Areas Commun. 2015, 33, 2418–2428. [Google Scholar] [CrossRef]
- Kumar, S.; Gil, S.; Rus, D.; Katabi, D. Accurate Indoor Localization with Zero Startup Cost. In Proceedings of the ACM Conference on Mobile Computing and Networking (MobiCom’14), New York, NY, USA, 7 September 2014; pp. 483–494. [Google Scholar]
- Yang, J.; Chen, Y. Indoor Localization Using Improved RSS-Based Lateration Methods. In Proceedings of the GLOBECOM 2009—2009 IEEE Global Telecommunications Conference, Honolulu, HI, USA, 30 November–4 December 2009; pp. 1–6. [Google Scholar] [CrossRef]
- Dalce, R.; Val, T.; Van Den Bossche, A. Comparison of Indoor Localization Systems Based on Wireless Communications. Wirel. Eng. Technol. 2011, 2. [Google Scholar] [CrossRef]
- IEEE 802.15.4a. IEEE Standard for Information technology– Local and metropolitan area networks—Specific requirements—Part 15.4: Wireless Medium Access Control (MAC) and Physical Layer (PHY) Specifications for Low-Rate Wireless Personal Area Networks (WPANs): Amendment 1: Add Alternate PHYs. Technical Report. 2007. Available online: https://standards.ieee.org/standard/802_15_4a-2007.html (accessed on 9 January 2022).
- Karapistoli, E.; Pavlidou, F.; Gragopoulos, I.; Tsetsinas, I. An overview of the IEEE 802.15.4a Standard. IEEE Commun. Mag. 2010, 48, 47–53. [Google Scholar] [CrossRef]
- IEEE Standard for Local and metropolitan area networks—Part 15.4: Low-Rate Wireless Personal Area Networks (LR-WPANs). In IEEE Std 802.15.4-2011 (Revision of IEEE Std 802.15.4-2006); IEEE: Piscataway, NJ, USA, 2011; pp. 1–314. [CrossRef]
- IEEE 802.15.4z-2020. IEEE 802.15.4z-2020—IEEE Standard for Low-Rate Wireless Networks—Amendment 1: Enhanced Ultra Wideband (UWB) Physical Layers (PHYs) and Associated Ranging Techniques. Technical Report. 2020. Available online: https://standards.ieee.org/standard/802_15_4z-2020.html (accessed on 9 January 2022).
- Hach, R. Symmetric double side two way ranging. Proceedings of IEEE Computer Society, Washington, DC, USA, 17–20 October 2005. [Google Scholar]
- Jiang, Y.; Leung, V.C.M. An Asymmetric Double Sided Two-Way Ranging for Crystal Offset. In Proceedings of the 2007 International Symposium on Signals, Systems and Electronics, Montreal, QC, Canada, 30 July–2 August 2007; pp. 525–528. [Google Scholar] [CrossRef]
- Neirynck, D.; Luk, E.; McLaughlin, M. An alternative double-sided two-way ranging method. In Proceedings of the 2016 13th Workshop on Positioning, Navigation and Communications (WPNC), Bremen, Germany, 19–20 October 2016; pp. 1–4. [Google Scholar] [CrossRef]
- Lian Sang, C.; Adams, M.; Hörmann, T.; Hesse, M.; Porrmann, M. Numerical and Experimental Evaluation of Error Estimation for Two-Way Ranging Methods. Sensors 2019, 19, 616. [Google Scholar] [CrossRef]
- Wu, Y.; Chaudhari, Q.; Serpedin, E. Clock Synchronization of Wireless Sensor Networks. IEEE Signal Process. Mag. 2011, 28, 124–138. [Google Scholar] [CrossRef]
- He, S.; Dong, X. High-Accuracy Localization Platform Using Asynchronous Time Difference of Arrival Technology. IEEE Trans. Instrum. Meas. 2017, 66, 1728–1742. [Google Scholar] [CrossRef]
- Decawave Limited. APS014 Application Note, Antenna Delay Calibration of DW1000-Based Products and Systems. 2018. Available online: https://www.decawave.com/wp-content/uploads/2018/10/APS014_Antennna-Delay-Calibration_V1.2.pdf (accessed on 9 January 2022).
- Hamer, M.; D′Andrea, R. Self-Calibrating Ultra-Wideband Network Supporting Multi-Robot Localization. IEEE Access 2018, 6, 22292–22304. [Google Scholar] [CrossRef]
- Vashistha, A.; Gupta, A.; Law, C.L. Self calibration of the anchor nodes for UWB-IR TDOA based indoor positioning system. In Proceedings of the 2018 IEEE 4th World Forum on Internet of Things (WF-IoT), Singapore, 5–8 February 2018; pp. 688–693. [Google Scholar] [CrossRef]
- Almansa, C.M.; Shule, W.; Queralta, J.P.; Westerlund, T. Autocalibration of a Mobile UWB Localization System for Ad-Hoc Multi-Robot Deployments in GNSS-Denied Environments. arXiv 2020, arXiv:2004.06762. [Google Scholar]
- Horváth, K.A.; Ill, G.; Milánkovich, Á. Calibration method of antenna delays for UWB-based localization systems. In Proceedings of the 2017 IEEE 17th International Conference on Ubiquitous Wireless Broadband (ICUWB), Salamanca, Spain, 12–15 September 2017; pp. 1–5. [Google Scholar]
- Gui, X.; Guo, S.; Chen, Q.; Han, L. A New Calibration Method of UWB Antenna Delay Based on the ADS-TWR. In Proceedings of the 2018 37th Chinese Control Conference (CCC), Wuhan, China, 25–27 July 2018; pp. 7364–7369. [Google Scholar]
- Shah, S.; Chaiwong, K.; Kovavisaruch, L.O.; Kaemarungsi, K.; Demeechai, T. Antenna Delay Calibration of UWB Nodes. IEEE Access 2021, 9, 63294–63305. [Google Scholar] [CrossRef]
- Shah, S.; Demeechai, T. Multiple Simultaneous Ranging in IR-UWB Networks. Sensors 2019, 19, 5415. [Google Scholar] [CrossRef]
- Decawave Limited. Decawave DWM1001 Datasheet. 2017. Available online: https://www.decawave.com/dwm1001dev/datasheet/ (accessed on 9 January 2022).
- Segger Microcontroller. Segger Embedded Studio. Available online: https://www.segger.com/products/development-tools/embedded-studio/ (accessed on 9 January 2022).
- Maranò, S.; Gifford, W.M.; Wymeersch, H.; Win, M.Z. NLOS identification and mitigation for localization based on UWB experimental data. IEEE J. Sel. Areas Commun. 2010, 28, 1026–1035. [Google Scholar] [CrossRef]
- Yu, K.; Wen, K.; Li, Y.; Zhang, S.; Zhang, K. A Novel NLOS Mitigation Algorithm for UWB Localization in Harsh Indoor Environments. IEEE Trans. Veh. Technol. 2019, 68, 686–699. [Google Scholar] [CrossRef]
- Park, J.; Nam, S.; Choi, H.; Ko, Y.; Ko, Y. Improving Deep Learning-Based UWB LOS/NLOS Identification with Transfer Learning: An Empirical Approach. Electronics 2020, 9, 1714. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
| Test Point | RMSE (cm) | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Pre-Calibrated | Post-Calibrated | Post-Calibrated | ||||||||||
| (with Antenna Delay) | (without Antenna Delay) | |||||||||||
| Coordinates | Position | Coordinates | Position | Coordinates | Position | |||||||
| x- | y- | z- | x- | y- | z- | x- | y- | z- | ||||
| T1 | 6.19 | 15.27 | 18.19 | 24.54 | 1.68 | 6.48 | 3.03 | 7.35 | 1.51 | 2.91 | 9.08 | 9.65 |
| T2 | 14.35 | 13.34 | 22.47 | 29.81 | 4.47 | 4.18 | 2.19 | 6.5 | 3.1 | 2.66 | 10.01 | 10.81 |
| T3 | 19.34 | 9.75 | 25.47 | 33.43 | 1.78 | 1.05 | 7.07 | 7.37 | 2.17 | 4.31 | 7.37 | 8.81 |
| T4 | 26.08 | 7.41 | 23.36 | 35.79 | 1.45 | 1.16 | 4.11 | 4.51 | 1.18 | 7.53 | 13.75 | 15.72 |
| T5 | 28.58 | 6.35 | 18.55 | 34.66 | 3.6 | 1.17 | 2.3 | 4.44 | 2.12 | 5.22 | 15.94 | 16.91 |
| T6 | 8.01 | 15.37 | 19.86 | 26.36 | 4.71 | 1.52 | 5.26 | 7.23 | 5.91 | 2.08 | 6.33 | 8.9 |
| T7 | 7.49 | 10.98 | 21.36 | 25.16 | 2.52 | 1.26 | 5.68 | 6.34 | 1.73 | 2.16 | 8.72 | 9.15 |
| T8 | 15.19 | 8 | 24.82 | 30.18 | 1.24 | 3.38 | 6.06 | 7.05 | 2.61 | 2.03 | 11.89 | 12.34 |
| T9 | 21.72 | 9.08 | 28.24 | 36.76 | 1.46 | 1.36 | 3.07 | 3.66 | 4.46 | 8.03 | 23.89 | 25.59 |
| T10 | 26.84 | 7.76 | 20.36 | 34.57 | 2.59 | 0.98 | 4.44 | 5.23 | 1.62 | 3.08 | 17.87 | 18.2 |
| T11 | 2.03 | 16.4 | 11.49 | 20.12 | 1.76 | 1.26 | 1.5 | 2.64 | 1.75 | 1.14 | 13.04 | 13.21 |
| T12 | 7.43 | 13.88 | 17.63 | 23.64 | 4.39 | 3.23 | 5.94 | 8.06 | 1.18 | 1.18 | 12.34 | 12.45 |
| T13 | 17.27 | 9.51 | 17.98 | 26.68 | 4.49 | 2.24 | 3.48 | 6.11 | 3.82 | 3.11 | 12.8 | 13.71 |
| T14 | 19.85 | 8.66 | 20.75 | 29.99 | 1.18 | 2.31 | 5.5 | 6.08 | 2.23 | 2.37 | 14.34 | 14.71 |
| T15 | 26.47 | 7.84 | 18.95 | 33.49 | 1.28 | 1.55 | 3.43 | 3.98 | 4.7 | 2.32 | 13.24 | 14.24 |
| T16 | 6.55 | 16.7 | 21.68 | 28.14 | 4.72 | 1.34 | 4.59 | 6.72 | 2.44 | 1.67 | 11.06 | 11.45 |
| T17 | 8.6 | 10.17 | 16.75 | 21.39 | 3.51 | 6.73 | 3.03 | 8.17 | 2.1 | 5.66 | 14.29 | 15.51 |
| T18 | 19.06 | 8.99 | 26.67 | 33.99 | 5.63 | 4.73 | 3.63 | 8.2 | 7.73 | 5.6 | 10.01 | 13.83 |
| T19 | 23.31 | 8.03 | 23.56 | 34.1 | 4.04 | 3.9 | 2.33 | 6.07 | 8.96 | 5.98 | 8.26 | 13.57 |
| T20 | 26.93 | 8.52 | 16.86 | 32.89 | 1.63 | 1.84 | 1.82 | 3.06 | 3.8 | 1.62 | 16.29 | 16.81 |
| Test Point | RMSE (cm) | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Pre-Calibrated | Post-Calibrated | Post-Calibrated | ||||||||||
| (with Antenna Delay) | (without Antenna Delay) | |||||||||||
| Coordinates | Position | Coordinates | Position | Coordinates | Position | |||||||
| x- | y- | z- | x- | y- | z- | x- | y- | z- | ||||
| T1 | 21.26 | 26.2 | 18.79 | 38.62 | 3.23 | 3.85 | 10.3 | 11.47 | 6.99 | 15.32 | 17.38 | 24.2 |
| T2 | 14.97 | 26.36 | 10.18 | 31.98 | 3.49 | 4.19 | 9.99 | 11.38 | 9.96 | 15.44 | 13.94 | 23.07 |
| T3 | 12.19 | 24.29 | 5.04 | 27.64 | 2.59 | 2.75 | 8.16 | 8.99 | 10.6 | 13.06 | 16.19 | 23.35 |
| T4 | 9.33 | 23.31 | 8.07 | 26.38 | 2.3 | 2.55 | 5.26 | 6.28 | 11.69 | 12.22 | 15.31 | 22.82 |
| T5 | 9.93 | 22.96 | 13.7 | 28.52 | 4.64 | 2.62 | 5.16 | 7.42 | 9.34 | 12.71 | 17.57 | 23.61 |
| T6 | 21.63 | 29.13 | 19.56 | 41.22 | 4.91 | 2.83 | 5.91 | 8.19 | 10.35 | 11.11 | 23.39 | 27.89 |
| T7 | 23.07 | 25.13 | 11.47 | 35.99 | 3.58 | 2.83 | 9.22 | 10.29 | 6.15 | 7.77 | 18.47 | 20.96 |
| T8 | 17.77 | 23.13 | 5.27 | 29.65 | 2.99 | 3.83 | 6.76 | 8.33 | 8.57 | 7.05 | 19.05 | 22.04 |
| T9 | 14.23 | 24.92 | 14.84 | 32.3 | 3.18 | 2.94 | 5.82 | 7.25 | 9.8 | 10.13 | 23.27 | 27.21 |
| T10 | 11.33 | 24.25 | 19.8 | 33.29 | 3.99 | 2.59 | 6.51 | 8.07 | 10.52 | 11.46 | 23.69 | 28.34 |
| T11 | 30.55 | 32.62 | 29.37 | 53.48 | 3.6 | 2.23 | 14.79 | 15.38 | 4.41 | 6.98 | 17.73 | 19.55 |
| T12 | 24.88 | 30.97 | 12.06 | 41.51 | 3.15 | 2.29 | 13.85 | 14.38 | 5.79 | 7.3 | 18.14 | 20.39 |
| T13 | 15.52 | 27.11 | 5.14 | 31.66 | 3.88 | 3.08 | 13.05 | 13.96 | 11.77 | 6.44 | 17.2 | 21.82 |
| T14 | 14.82 | 26.05 | 14.42 | 33.26 | 3.14 | 3.09 | 7.46 | 8.66 | 10.21 | 8.02 | 22.5 | 25.98 |
| T15 | 11.28 | 24.86 | 21.99 | 35.05 | 3.16 | 2.64 | 7.21 | 8.31 | 11.52 | 9.47 | 25.93 | 29.91 |
| T16 | 25.7 | 36.78 | 12.42 | 46.55 | 5.01 | 2.14 | 7.31 | 9.12 | 7.77 | 4.21 | 25.26 | 26.77 |
| T17 | 23.7 | 29.51 | 10.5 | 39.28 | 2.92 | 6.04 | 15.25 | 16.66 | 5.89 | 3.04 | 15.21 | 16.59 |
| T18 | 14.81 | 28.27 | 14.66 | 35.12 | 4.37 | 4.63 | 4.97 | 8.08 | 11.31 | 3.49 | 26.33 | 28.87 |
| T19 | 11.12 | 26.02 | 19.62 | 34.43 | 3.2 | 3.68 | 4.67 | 6.75 | 12.73 | 4.62 | 26.38 | 29.65 |
| T20 | 8.93 | 25.31 | 21.91 | 34.65 | 2.5 | 2.7 | 4.62 | 5.91 | 13.32 | 7.08 | 25.75 | 29.84 |
| Method | Result | Clock | Reference | Calibration | RMSE (cm) |
|---|---|---|---|---|---|
| Synchronization | System | ||||
| Hamer et al. [28] | Experiment | Required | Required | Position | 9.7 |
| Vashistha et al. [29] | Experiment | Required | Required | Position | 30 |
| Almansa et al. [30] | Simulation | Not required | Not required | Position | 135 |
| Proposed | Experiment | Not required | Not required | Position and | 5.94 |
| antenna delay |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shah, S.; Kovavisaruch, L.-o.; Kaemarungsi, K.; Demeechai, T. Node Calibration in UWB-Based RTLSs Using Multiple Simultaneous Ranging. Sensors 2022, 22, 864. https://doi.org/10.3390/s22030864
Shah S, Kovavisaruch L-o, Kaemarungsi K, Demeechai T. Node Calibration in UWB-Based RTLSs Using Multiple Simultaneous Ranging. Sensors. 2022; 22(3):864. https://doi.org/10.3390/s22030864
Chicago/Turabian StyleShah, Shashi, La-or Kovavisaruch, Kamol Kaemarungsi, and Tanee Demeechai. 2022. "Node Calibration in UWB-Based RTLSs Using Multiple Simultaneous Ranging" Sensors 22, no. 3: 864. https://doi.org/10.3390/s22030864
APA StyleShah, S., Kovavisaruch, L.-o., Kaemarungsi, K., & Demeechai, T. (2022). Node Calibration in UWB-Based RTLSs Using Multiple Simultaneous Ranging. Sensors, 22(3), 864. https://doi.org/10.3390/s22030864