1. Introduction
Acoustic signals are of interest in the telecommunications industry for various remote applications, such as sonar for underwater civilian/military scenarios [
1,
2,
3], modems for both aerial and underwater communications [
4,
5,
6], as well as echography and other medical applications involving image reconstruction [
7,
8,
9]. Networks of acoustic sensors, called wireless acoustic sensor networks (WASNs), are increasingly adopted to support sensing and monitoring applications in the emerging paradigm of the smart cities. Prominent examples include the monitoring of urban noise [
10,
11], the deployment of advanced acoustic surveillance systems [
12], and more generally indoor and outdoor applications benefiting from the extraction of contextual information (e.g., proximity, ranging) from acoustic communications [
13]. In general, acoustic signals have several possible applications in relation to the adopted frequency range: the frequency band audible to humans (audio band), the frequency band higher than the audible ones (ultrasonic band), or the frequencies lower than those audible (infrasonic band). The audio band is used for natural acoustic communications for humans and animals and in short-range telecommunications system, the ultrasonic band (typical of bats and dolphins) is used for imaging applications, while the infrasonic band (present in elephants) is adopted for earthquake detection.
Acoustic communications, which as mentioned found major applications in underwater as well as wired contexts, are recently experiencing renewed interest in some wireless scenarios. In fact, the use of the electromagnetic (EM) spectrum is increasingly saturated for commercial, social, and military applications, through the use of Wi-Fi modems, GPS, smartphones, and Internet of Things (IoT) devices [
14,
15,
16,
17,
18]. It is thus useful to introduce a different communication channel to guarantee the continuity of necessary services; a contribution to this problem is given by acoustic communications, which makes available a dedicated channel, independent from the EM one. Communication through the acoustic channel is possible for many off-the-shelf devices, such as smartphones, computers, TVs, etc., since they are equipped with transducers for the transmission and reception of acoustic signals, namely speakers and microphones. Through the same channel it is possible to perform ranging as in a sonar system. This is of particular interest for indoor localization, where access to satellite positioning systems such as GPS is denied [
19]: it is possible to carry out localization tasks using the acoustic channel, with acoustic devices already present in many rooms (speakers and microphones) [
20,
21,
22].
A very recent research direction is also to integrate some sensing functionality with communications. For EM signals, this is expected to be a key feature of the 6G cellular networks, allowing exploiting the dense cell infrastructure of 5G for constructing a perceptive network [
23,
24,
25]. It is foreseeable, in fact, that future networks will go beyond classical communication and provide a sensing functionality to measure the surrounding environment [
26,
27]. This motivates the recent research theme of Integrated Sensing and Communications (ISAC) [
28], which however concerns radiofrequency communications and radar systems. In fact, ISAC was first implemented over a missile range instrumentation radar via pulse interval modulation, where information was embedded into a group of radar pulses [
29]. Such systems are defined by different names, e.g., joint radar and communication or dual-functional radar-communications [
30]. The sensing functionality in these systems mainly refers to radar sensing since, as a major representative of sensing technologies, radar’s development has been profoundly affected by wireless communications, and vice versa [
28].
Motivated by the above, we developed a system that allows performing dual-function communication and echo-location (DFCE) in inaudible band, with low-cost hardware. We present an acoustic waveform design that tries to strike a balance between communication and ranging performance, while fulfilling the challenging constraints of the inaudible band. Our work proposes an acoustic communication system between devices, such as smartphones and common speakers, which allows sending and receiving data. Through the same waveform that transports the information, the DFCE system can estimate distances according to the principles of acoustic echo-locator. To the best of the authors’ knowledge, this is the first demonstration of low-cost acoustic system in inaudible band able to perform joint communications and echo-location, and can represent a starting point for more advanced applications in different scenarios.
The remainder of the paper is organized as follows. In
Section 2, we provide some background on acoustic communications and review the state-of-the-art approaches targeting the problem of acoustic localization and sensing. In
Section 3, we present in detail the design of the proposed DFCE system, illustrate its main parameters, and discuss the fundamental trade-offs between communication and ranging. Then, in
Section 4 we conduct experimental analyses in a real environment to assess the performance of the proposed DFCE system in terms of data rate and accuracy in distance estimation, using a testbed based on low-cost off-the-shelf hardware. We conclude the paper in
Section 5.
2. Background and Related Work
Acoustic communications are attractive because they do not require extra hardware on either transmitter and receiver sides, which facilitates numerous near-field communications (NFC) use cases such as mobile payment and data sharing, very important tasks in IoT and other applications. The scientific literature explores acoustic communications separately from acoustic localization. Existing approaches focused on which band to use (audible, inaudible, ultrasound), and on the efficiency of the various acoustic modulations. Many of the works share some common signal processing steps, in particular for the sake of achieving high signal-to-noise ratio (SNR), since acoustic sensors (especially microphones) are quite sensitive and vulnerable to background noises, channel distortions, and multipath effects.
Noise generally arises from in-band and out-of-band interference. In common processing, out-of-band interference can be filtered out by means of digital filters such as finite impulse response. Another typical processing block is a matched filter, which seeks the waveform of interest in noise by correlating the measurements with a known reference signal. A common problem for inaudible transmission is that the audio speaker diaphragm inertia can cause ringing effects in the presence of rapid amplitude or phase variations in the transmitted signal: the speaker diaphragm inertia will generate out-of-band audible noise, due to the impulsive nature of the signal, despite the transmitted signal occupying inaudible frequency bands. To solve this problem, it is possible to introduce a smooth increase and decrease the amplitude of the first and last few samples (fade-in, fade-out) in the case of amplitude shift keying (ASK) modulation, and use a continuous-phase frequency shift keying (FSK) modulation to reduce impulsive noise.
In [
31], multiple tones are used to transmit data at 5.6 kilobits per second (kbps) in an audible mode (735–410 Hz), or a single tone for 1.4 kbps rate in an inaudible mode (18.4 kHz); both modes work up to 2 m distance with line-of-sight (LOS) communication. In [
32], an application is presented which implements orthogonal frequency division multiplexing (OFDM) with binary and quadrature phase shift keying (PSK) modulation schemes in the 6–7 kHz band. The proposed system aims at substituting NFC with a data rate of up to 800 bps in a very short range, less than 20 cm, and achieves a maximum data rate of 2.4 kbps. In [
33], a communication system based on tone modulation is presented: it leverages the presence or absence of audible tone signals to embed information with ASK. This approach achieves a data rate of about 5 kbps with multiple audible tones, which reduces to 1.4 kbps when a single inaudible tone is applied. It reaches a maximum communication range of 2 m under LOS condition.
The authors in [
34] proposed leveraging the
masking effect of the human hearing system to achieve inaudible acoustic communication. This approach employs OFDM modulation and achieves 240 bps data rate. The masking effect happens when a signal is superimposed to another sound that is playing (a masker). The masker does not need to have the frequency components of the original signal for masking to happen, and a masked signal can be heard even though it is weaker than the masker. In [
35], the authors focused on inaudible acoustic communication for off-the-shelf audio interfaces in long-range indoor environments, adopting a
chirp signal, which is a signal in which the frequency varies linearly with time, increasing (up chirp) or decreasing (down chirp). By adopting such a signal, originally introduced in radar applications, the range is extended up to 25 m, to support most smart devices equipped with microphones and selective frequency responses. The authors developed a software digital modem for smartphones that can efficiently demodulate the chirp signal by combining fast Fourier transform and Hilbert transform, at a low data rate of approximately 16 bps. They choose the 19.5–22 kHz range and up/down chirp to identify bits, using the correlation function to match the received sound with up/down chirp, and find the maximum by smoothing the auto correlation curve, whose envelope is obtained via Hilbert transform.
In [
36], a new form of real-time dual channel communication over speaker-microphone links, called Dolphin, was proposed. Dolphin generates composite audio for the speaker by multiplexing the original audio, for the human listener, and the embedded data signals, for smartphones. The composite audio can be rendered for human ears without affecting the content perception of the original audio. The user listens to the audio as usual without sensing the embedded data; in the meantime, the data signals carried by the composite audio can be captured and extracted by the smartphone microphones. The application belongs to the audible communication group, using masking effect. The authors adopted OFDM with on-off keying (OOK), a special form of ASK, in the bandwidth between 17 and 20 kHz. For the convenience of data transmission and decoding, they divide the embedding data-streams into packets. A packet consists of a preamble and 31 symbols, each preceded by a cyclic prefix. The preamble is used to synchronize the packet and the symbols contain data bits. At the receiver side, the system also exploits the channel estimation, to compensate for the effects of the channel. In [
37], a classic cyclic redundancy check code to is added for error detection on the received data.
The system called Backdoor, proposed in [
38], uses ultrasound signals that are naturally inaudible to humans yet completely recordable by all microphones without any hardware or software changes. However, specific hardware for the emission of ultrasound is required, which is more difficult to have in practice than a common speaker.
An acoustic-enabled mesh network was proposed in [
39]. This approach leverages frequency hopping spread spectrum and achieves 20 bps at a distance up to 20 m. The systems works in the audible band, below 18 kHz. In particular, a sequence of known tones belonging to a single musical scale is used as the spreading sequence. The transmitter sends the information bits on a sequence of different frequencies; this sequence is known to the receiver which extract the data knowing the encryption key.
A complete and functional commercial application in inaudible band, whose development started as a university spin-off in 2011, is called Chirp [
40]. It uses FSK for its modulation scheme, due to its robustness to the multipath propagation present in real-world acoustics, compared to schemes such as PSK or ASK. For spectral efficiency, Chirp uses an
M-ary FSK scheme, encoding input symbols as one of
M unique frequencies. Each symbol is modulated by an amplitude envelope to prevent discontinuities, with a guard interval between symbols to reduce the impact of reflections and reverberation at the decoding stage. Chirp has been recently acquired by Sonos (a leading innovative loudspeaker brand), then its software development kit, public and open source until March 2020, is not available anymore—hence the details of the implementation of the current version are not disclosed (Chirp holds 14 data-over-sound related patents (4 granted) dating back to 2010, covering custom modulation scheme, de-reverberation, noise reduction, and multi-environment optimization. According to the company, this would allow data to be transmitted using sound in the harshest environments.).
For acoustic ranging, authors in [
41] develops a basic echo-locator to calculate distance with sound sensors. A microphone and the internal speaker of the smartphone are used to this aim: after transmitting the signal and recording the reflection, the cross-correlation (after filtering) is used to compare the received signal with the original pulse. This method implements a transmission of a signal for which the identification of the maximum value of the cross-correlation function is less ambiguous, i.e., a linear chirp.
BeepBeep [
42] is the first work that uses acoustic signal for precise ranging on commodity mobile devices. It calculates the distance between pair-wise transceivers by estimating the propagated time of acoustic signals. BeepBeep avoids tight synchronization via a two-way sensing approach: one device first emits a chirp signal, then upon detection, the other device waits for an arbitrary period and then emits another chirp signal. Both transceivers finally calculate the time difference between the events of transmission and reception locally by counting the number of acoustic samples. A central server is used to compute the results from the time differences.
BatMapper [
43] realized a radar using acoustic signals (sonar) on off-the-shelf mobile devices for indoor floor map construction. The acoustic ranging module in the application consists of sound emission, sound recording by two microphones in a single device, and a series of signal processing steps to produce distance/amplitude measurements for echo candidates in both microphones. BatMapper also leverages three sensing modalities: acoustic, gyroscope, and accelerometer for fast, accurate floor plan construction. The user walks along corridors and inside rooms while holding the phone. The phone keeps emitting and recording sound signals, detects sound reflections and measures their distances by using amplitudes. Two frequencies are employed due to the hardware limitations and heterogeneous properties of the smartphone’s two microphones (16 kHz for top microphone and 10 kHz for bottom microphone) and also because for the same emitted energy, low frequency sounds propagate farther than high frequency ones.
In the present work, we developed a system that allows simultaneously performing communication and ranging operations, in inaudible band, with low-cost hardware. Our acoustic waveform design tries to strike a balance between communications and ranging performance, while fulfilling the constraints of the inaudible band. Our work in particular proposes an acoustic communication system between devices, such as smartphones and common speakers, which allows sending and receiving data but, at the same time, can estimate distances according to the principles of acoustic echo-locator, by implementing a DFCE system. To the best of the authors’ knowledge, this is the first demonstration of such an acoustic system in inaudible band, and can represent a starting point for more advanced applications in different scenarios.
4. Experimental Performance Assessment of the Proposed DFCE System
An experimental testbed was implemented to assess the performance of the proposed system, following the scheme reported in
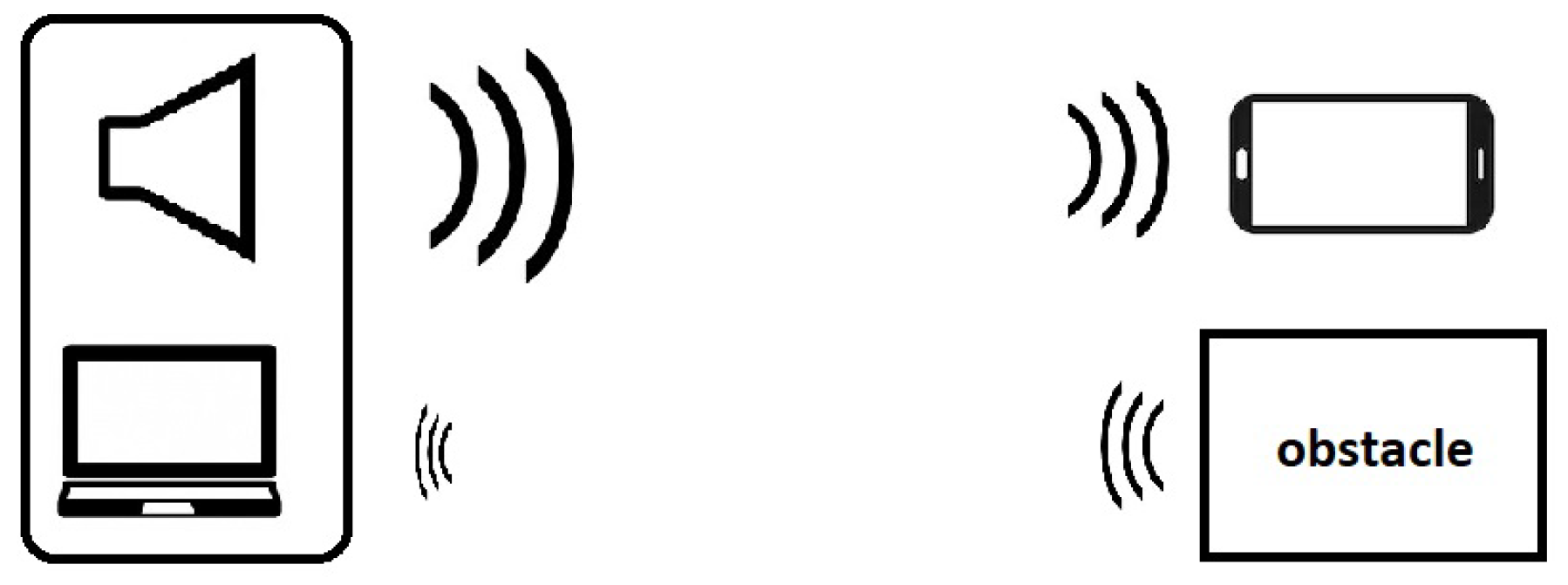
Figure 4. The software part was developed in Matlab, while the hardware part includes the following:
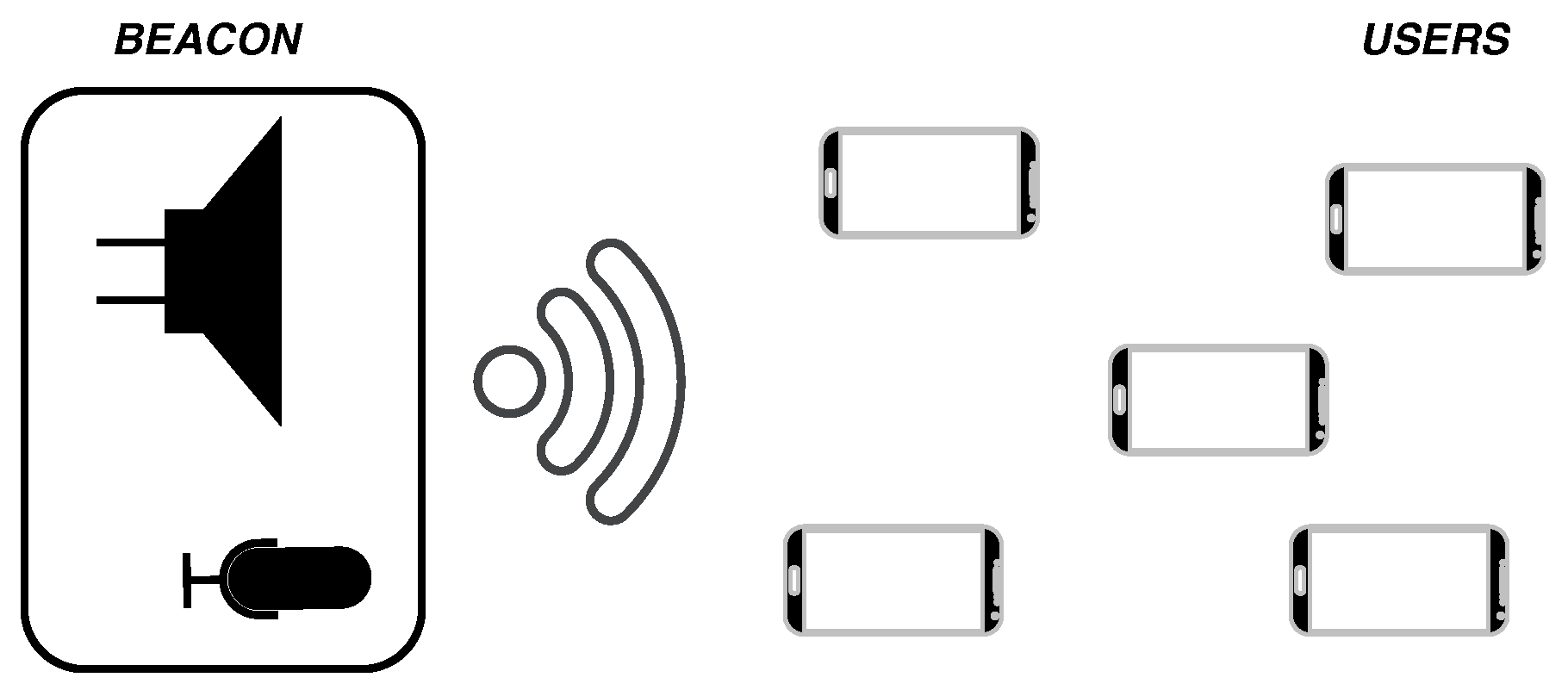
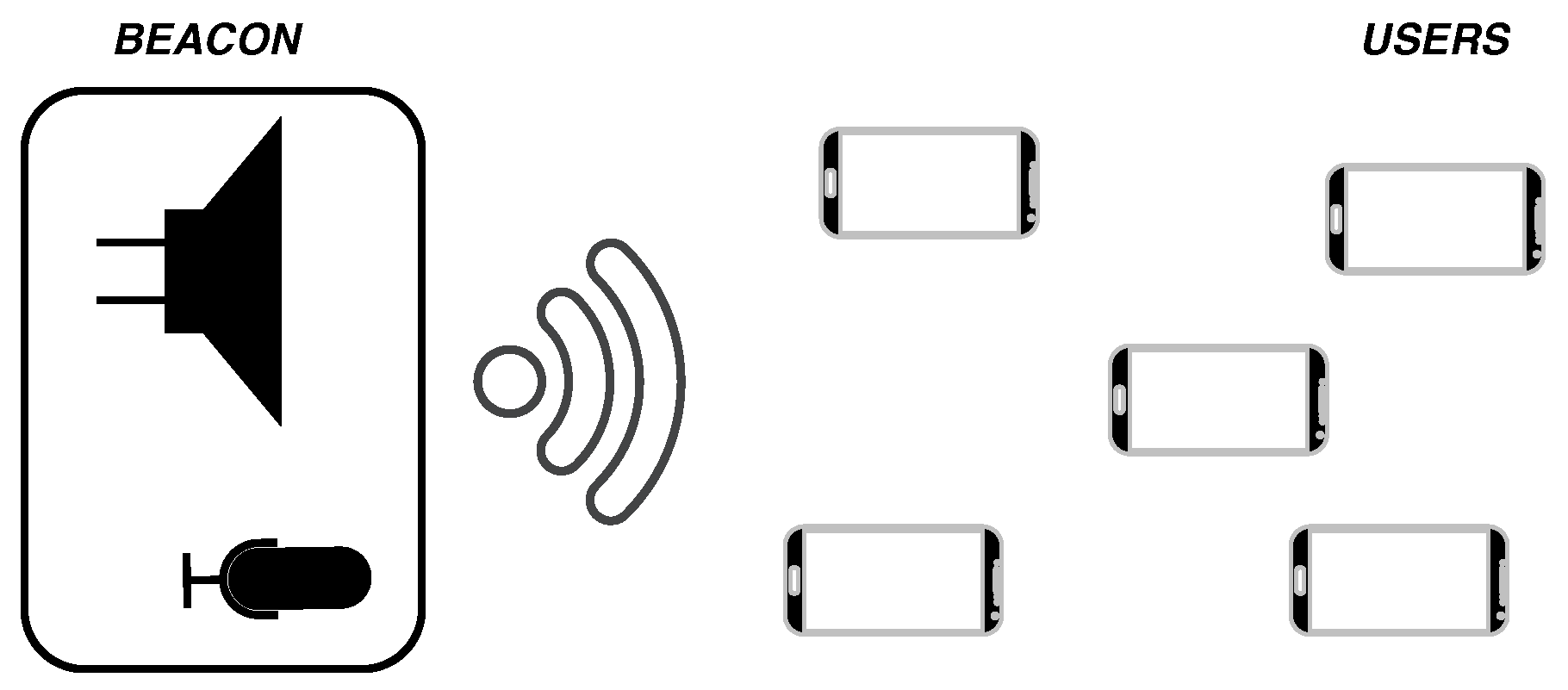
A beacon, consisting of a standalone loudspeaker as acoustic transmitter and a laptop with integrated microphone as acoustic receiver. It is used for sending broadcast data and receive the echo signal.
An off-the-shelf device, in particular a smartphone with an onboard microphone. This implements the receiver of the broadcast beacon signal.
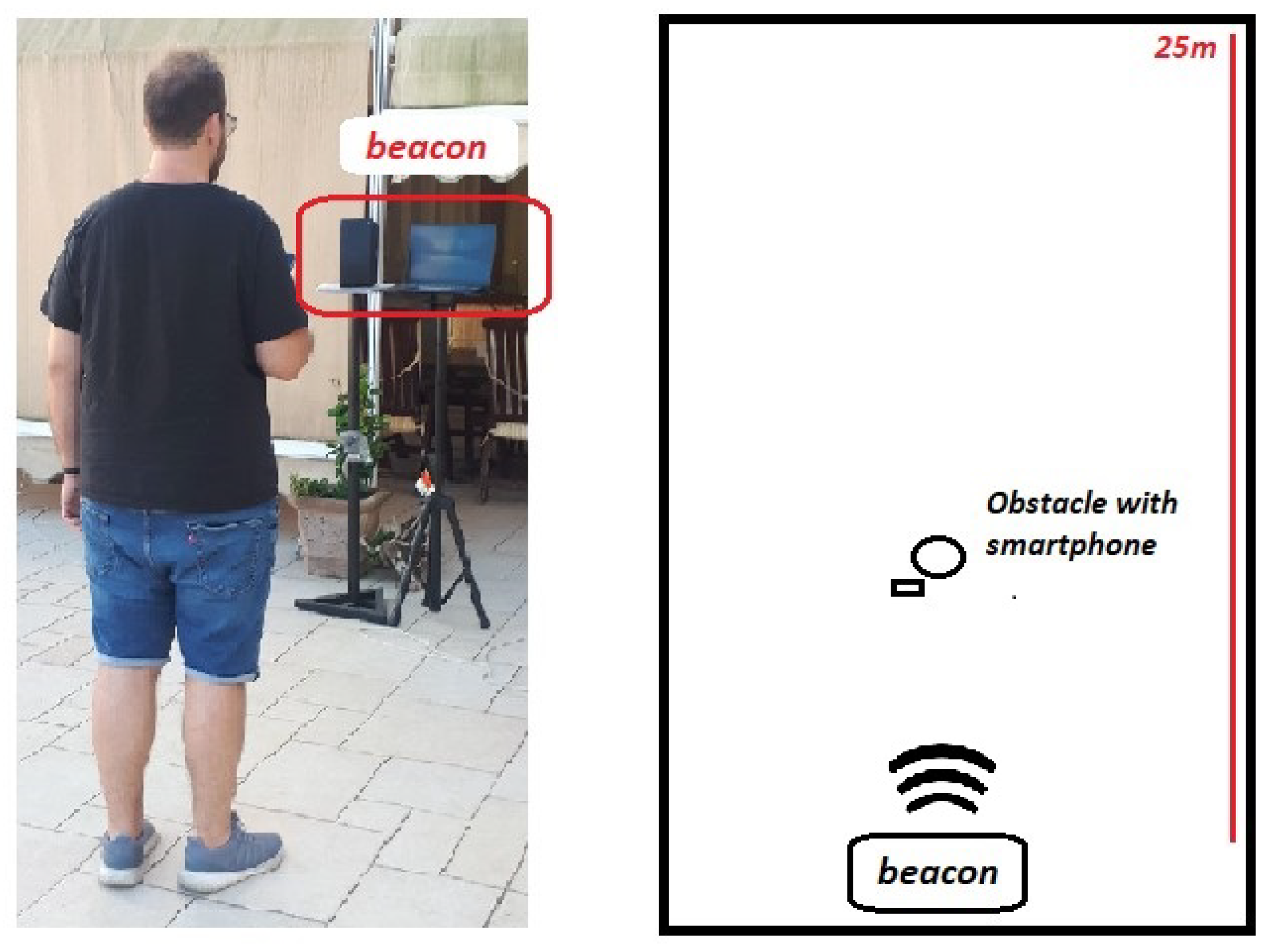
In particular, the setup shown in
Figure 5 was adopted. It includes a 20 Watts-RMS/40 Watts-peak loudspeaker (model Mackie Free-play Home), with two full-range drivers with 2.5 in/64 mm and two passive radiators for extended bass frequencies with quasi-flat
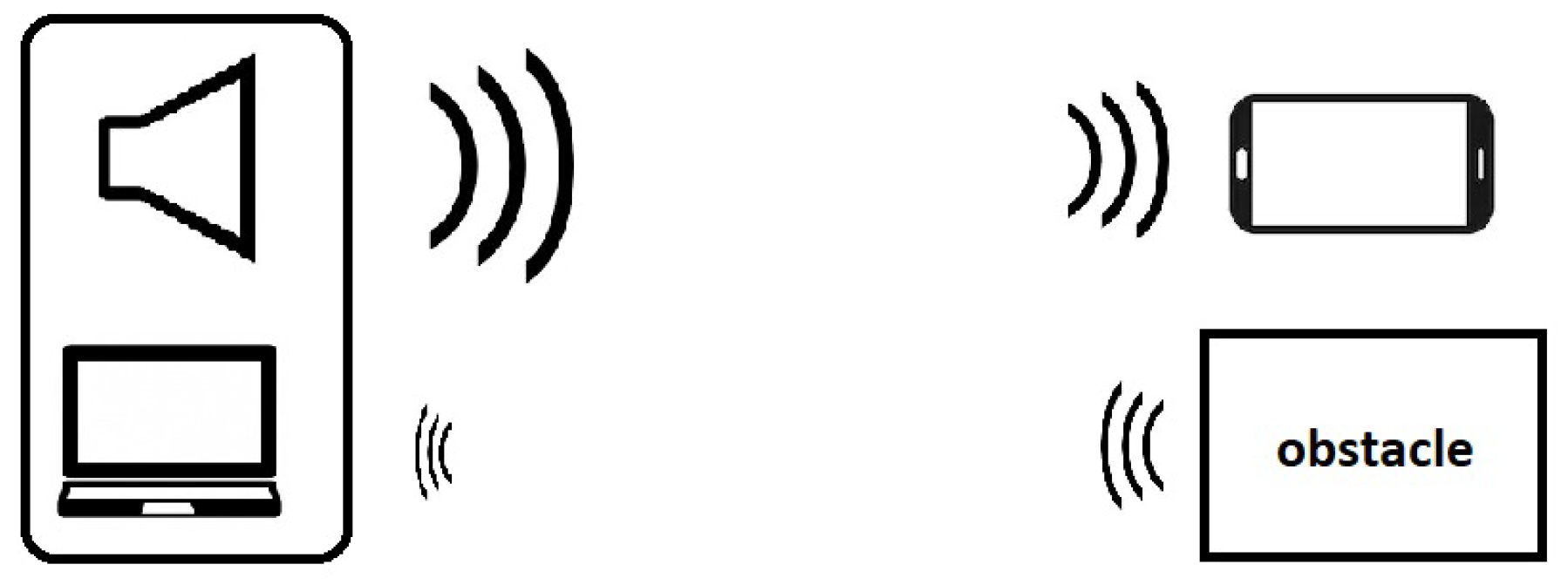
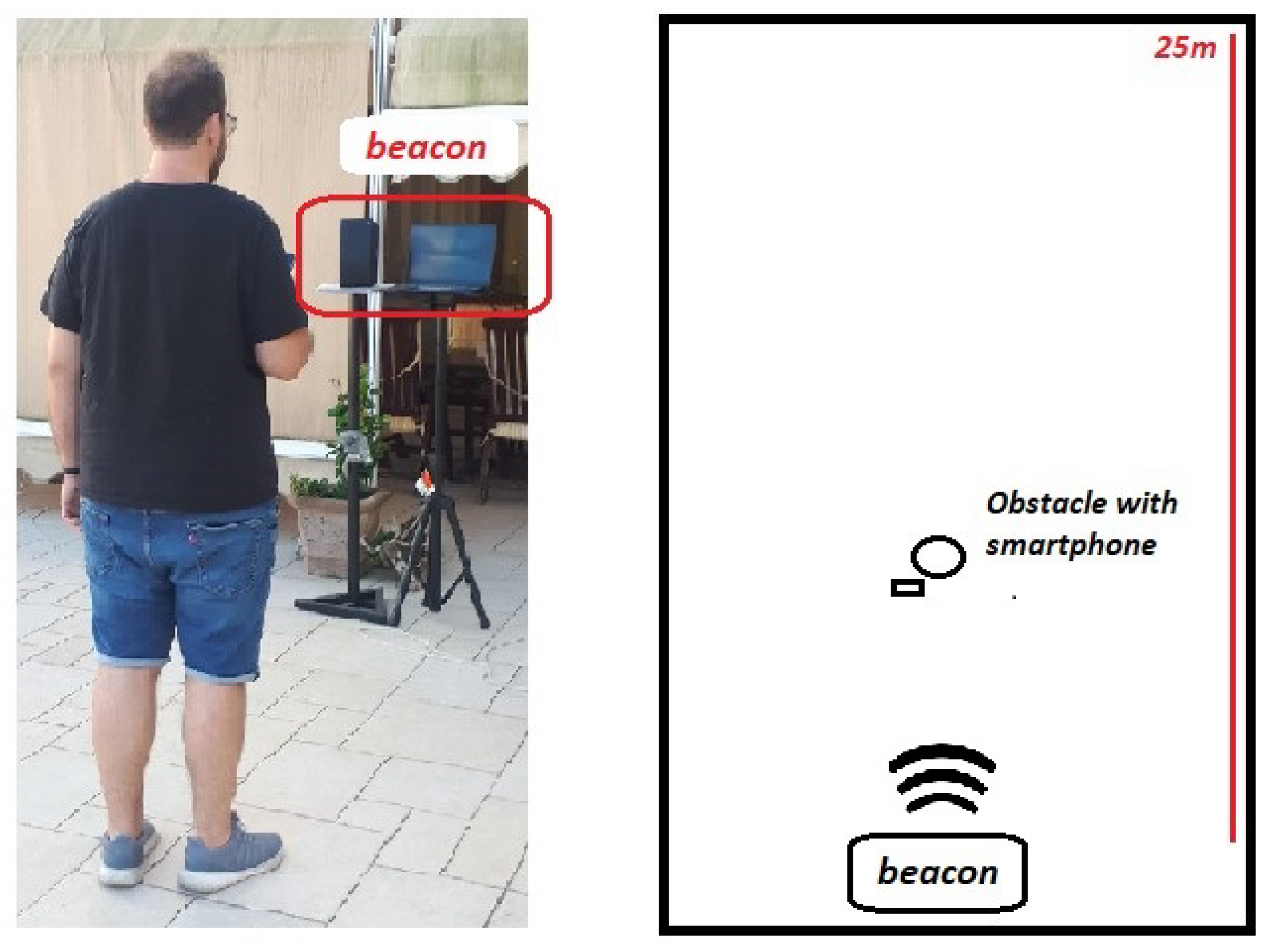
dB response between 0.12 and 20 kHz. The beacon consists of a notebook connected to the external speaker via mini-jack cable. The system is positioned on two supports at a height of 150 cm, so that the position of the speaker and the microphone of the PC are aligned. The user receiver is an Android smartphone (OPPO A72), whose audio specifications are similar to most current smart devices, namely ADC with sampling frequency of 44.1 kHz, meaning that the maximum non-aliased frequency is 22.05 kHz. The smartphone is carried by one of the authors which is therefore the main obstacle reflecting the sound waves as shown in
Figure 6. In general, significant echoes are generated by particularly reflective, non-porous material, with size comparable to 10–15 times the half wavelength of the frequencies emitted by the pulse. The smartphone/obstacle was positioned at several distances, so as to test the DFCE system under different operational conditions.
The environment in which the experiments were carried out is an open space with a perimeter of about 15 × 25 m covered by walls, without obstacles along the LOS between beacon and target. The measurements were repeated numerous times to ensure statistical consistency. The weather was clear, without rain and wind; the factors of humidity and temperature, which make a minimal contribution, were not taken into consideration. The levels in dB(Z) and dB(A) of the sound pressure level (SPL) were measured with a European-law class-1 sound level meter, calibrated in 2019 with ACCREDIA certification.
To evaluate the operating efficiency of the proposed DFCE system, various measurements of different parameters were performed:
the SNR as a function of distance, to evaluate the maximum operating range; the audio noise produced by the modulation was also evaluated;
the bit error rate (BER) as a function of the distances, to assess the communication performance;
the error on the distance estimation to assess the echo-location performance.
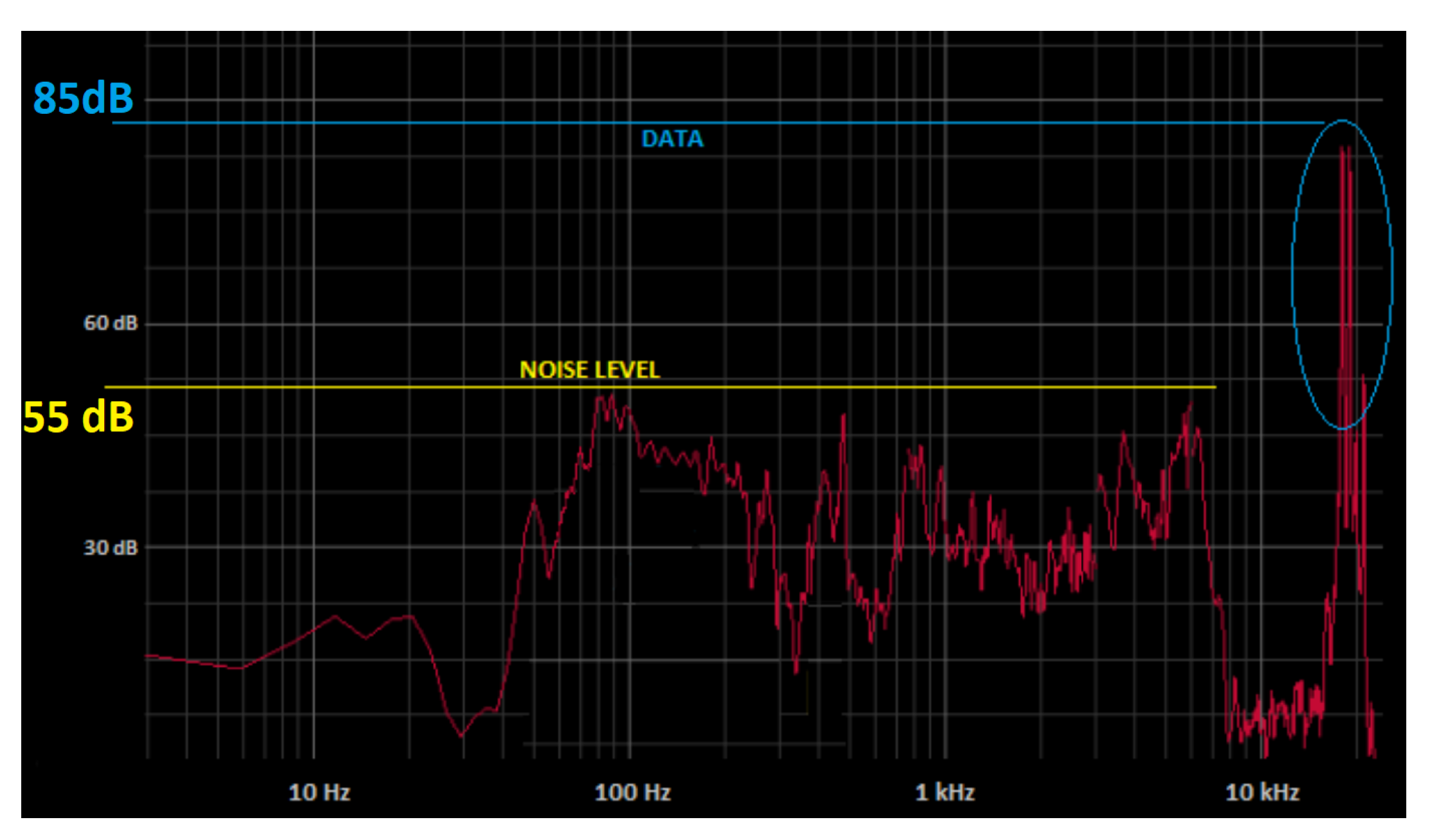
In the considered outdoor environment, an acoustical background noise of about 55 dB(Z) SPL was measured on average; a value of 85 dB(Z) SPL was subsequently measured during the transmission of data pulses, where dB(Z) denotes a flat frequency response (no weighting). The noise measurement level in
Figure 7, highlighted in yellow, is thus overall 30 dB less than the pressure level of the transmitted signal, highlighted in blue. However, if A-weighting based on isophonic curves for the human ear is considered (IEC 61,672:2003 standard), the SPL values become about 55 dB(A) and 65 dB(A) for background noise and transmitted data pulses, respectively, (regardless of age). This means that because the human ear is most sensitive to sound frequencies between 500 Hz and 6 kHz, the additional acoustic pressure generated by the transmitted signal is practically perceived as environmental noise. In general, we can see that the background noise is mainly concentrated in the band under 8 kHz, and is otherwise very small over 10–15 kHz. The inaudible system is thus intrinsically robust against background noise.
The SNR value can be expressed as a function of the transmission loss (TL), consequently distance
d, source level (SL) and noise level (NL), as follows:
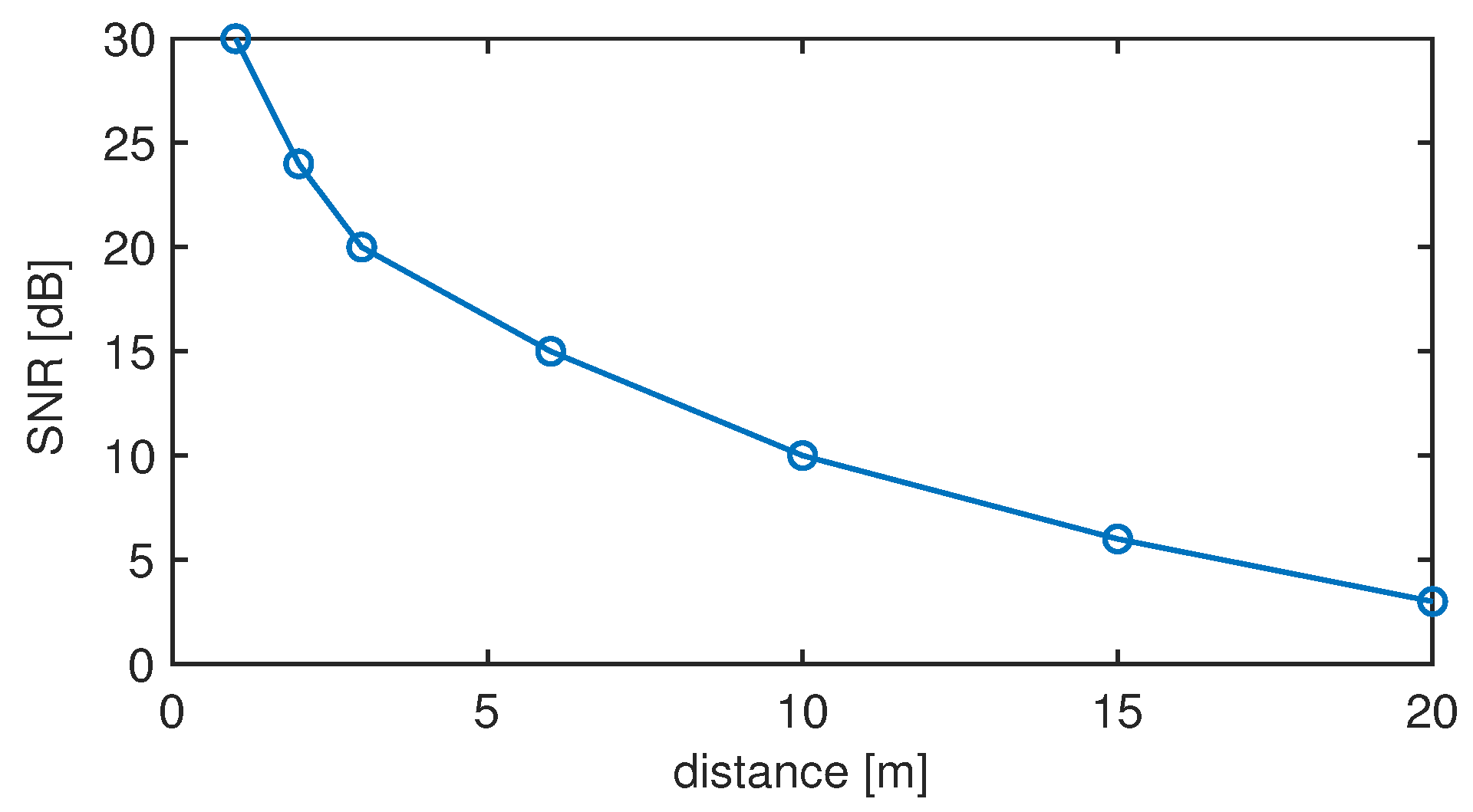
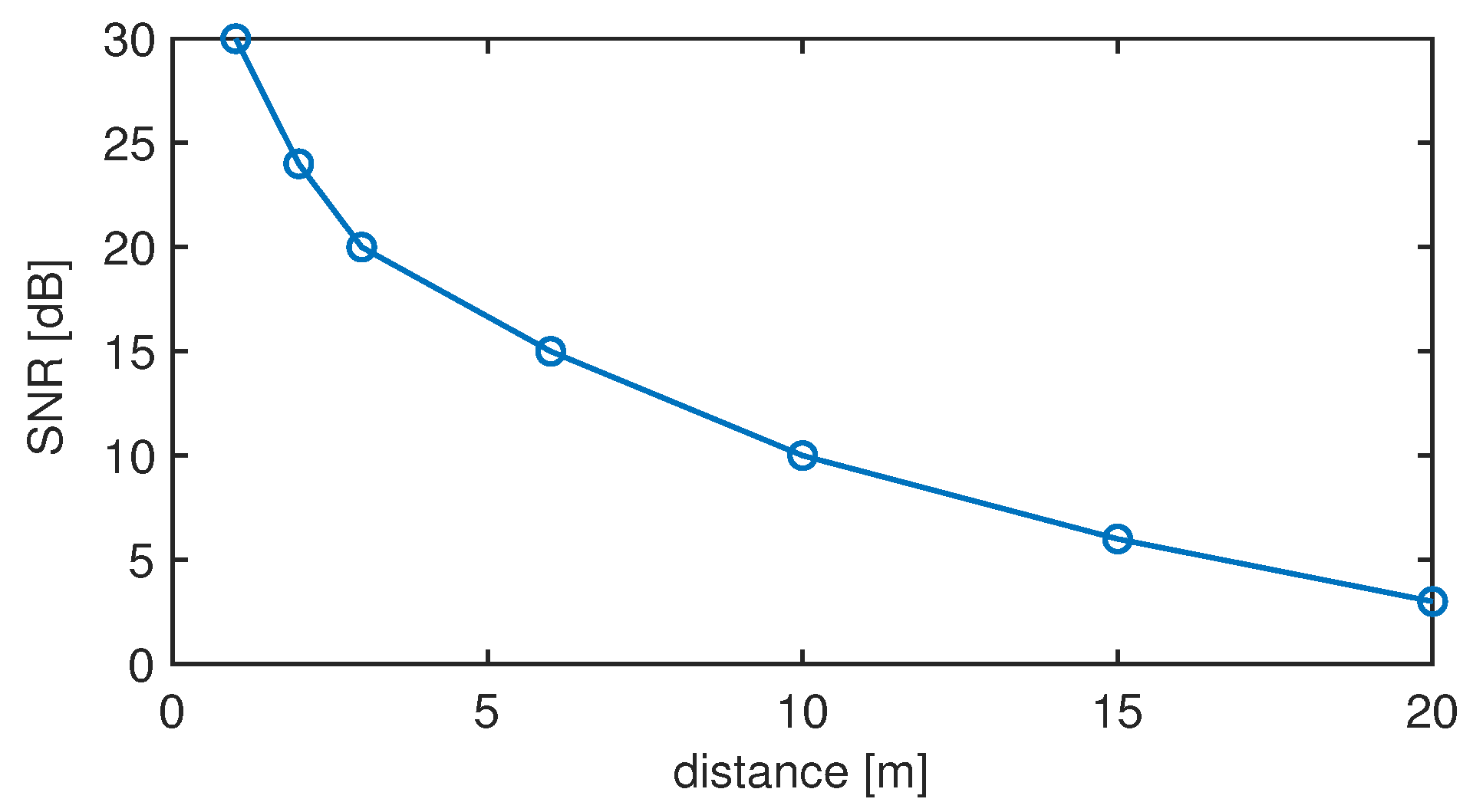
In
Figure 8, we report the evolution of the SNR as a function of the distance. As it can be noticed, the system experiences an SNR of about 30 dB at short distances; as the distance increases up to 8–10 m, the SNR decreases accordingly until reaching a value of about 9–10 dB. It is only when the distance grows up to 20 m that SNR values fall below 5 dB.
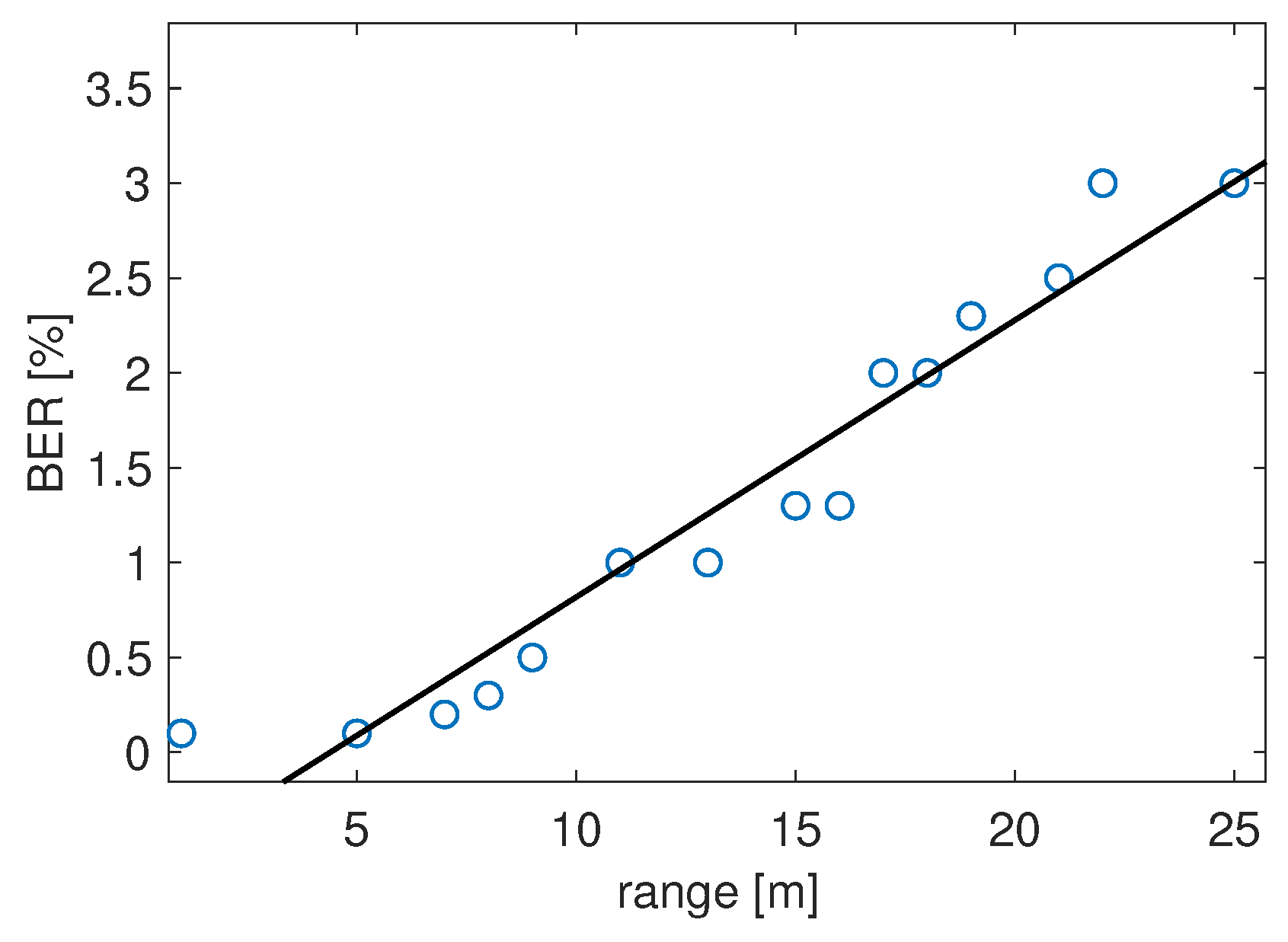
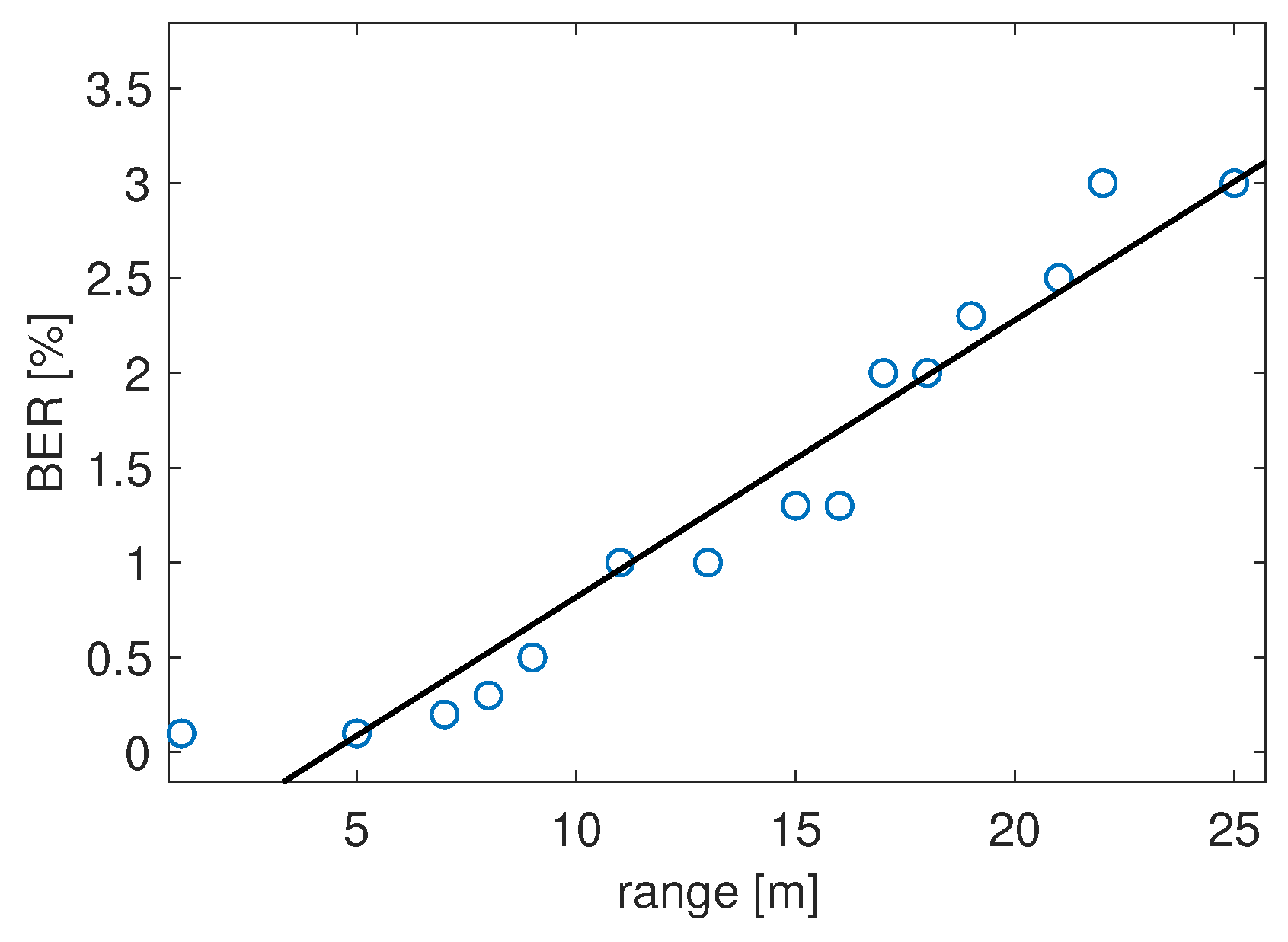
To evaluate the transmission performance, we considered the BER, i.e., the number of errors on the decoded bits per unit of time. It provides a measure of the quality of the entire communication system, and can be calculated as the ratio between the number of erroneous bits and the number correctly decoded bits:
In our tests, the smartphone (receiving device) was placed at different distances from the speaker of the beacon, in the range of 1–25 m (a value in line with the state-of-the-art, as discussed in
Section 2). The signal was transmitted at the rate of 10 bps, with a single pulse of 1 ms and a PRT set to 9 ms (for the sake of accurate ranging, as discussed later), for
bits. The results, as a function of the distance, are shown in
Figure 9. It can be seen that the BER is very small at short ranges, still quite small below 10 m, and grows above 2% between approximately 20 and 25 m.
More specifically, the BER is about up to 6 m, less than up to 10 m. This confirms that the communication with the smartphone is sufficiently reliable and the behavior of the BER is sufficiently predictable by means of a linear law.
To assess the echo-location performance of the waveform transmitted for communication, again various measurements were made and averaged, at several distances. The minimum measurable distance using a chirp with duration 1 ms, with the speed of sound of 340 m/s at room temperature is
Indeed, the DFCE system is “blind” to targets that are too close in range; in particular, it is not possible to estimate distances
d corresponding to delays shorter than the duration
T of the probing signal. In other words, the transmission of the chirp must end before any possible echo can be detected, hence the minimum resolvable distance value in Equation (
16) follows.
The system trade-offs allow measuring a maximum distance related to a total transmission time of
ms (see
Table 2) as
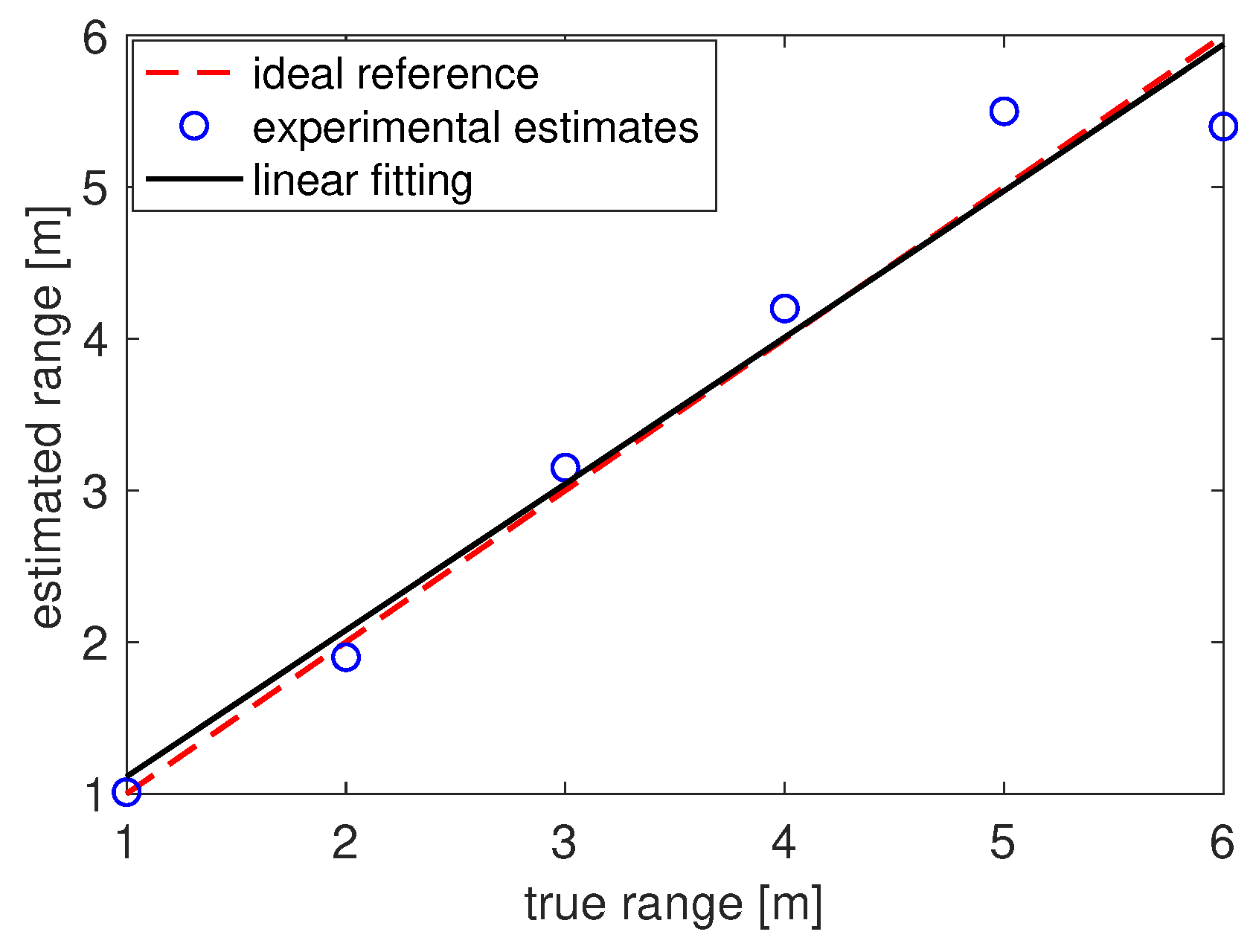
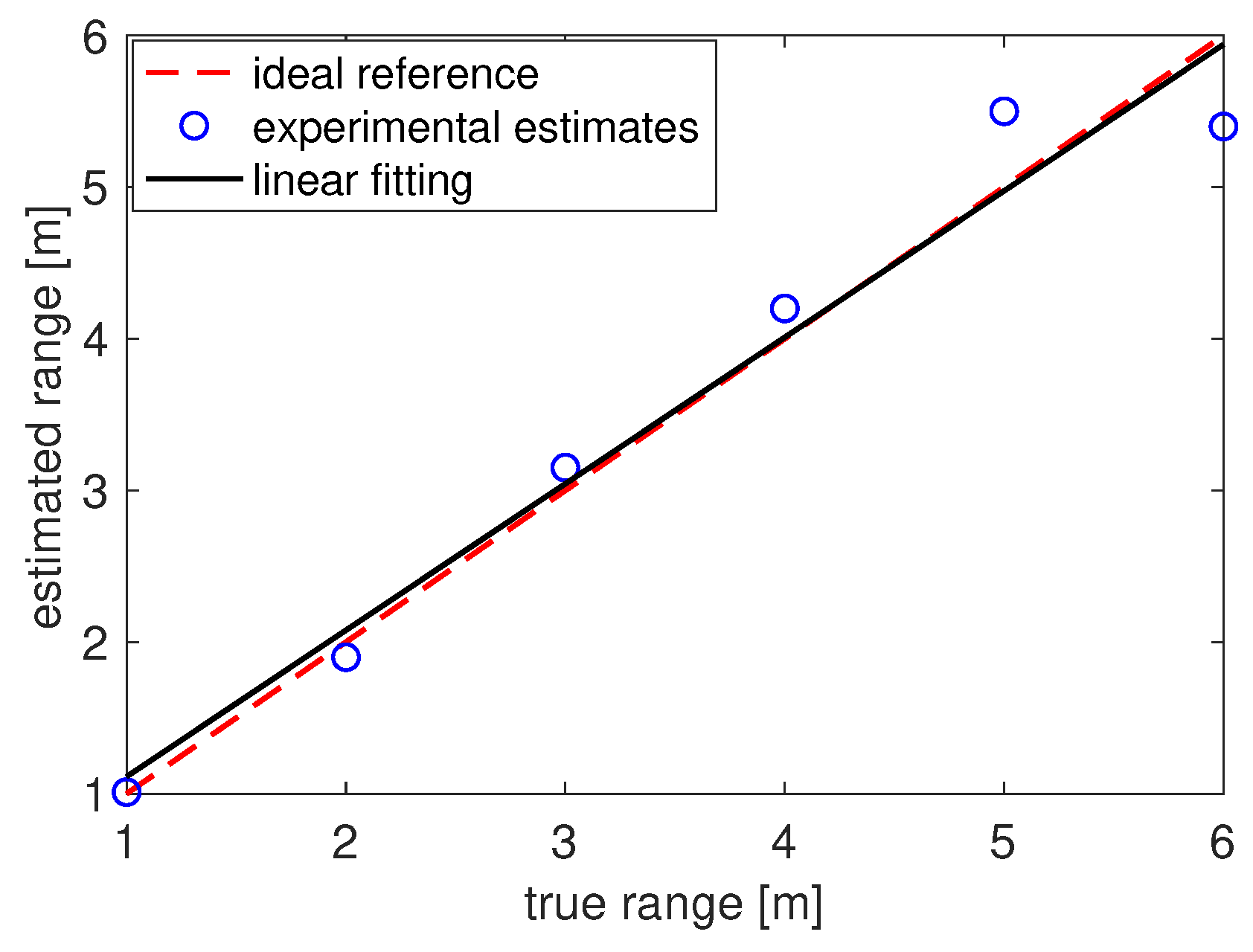
Figure 10 shows the estimated distance
as function of the true distance
d. The dashed red curve shows the ideal behavior with zero error, while the solid black curve shows the linear fitting computed using the values of the estimated distances (blue circles) obtained during the tests. The very good adherence between the reference and the estimated values reveals that the proposed DFCE system delivers accurate range estimates.
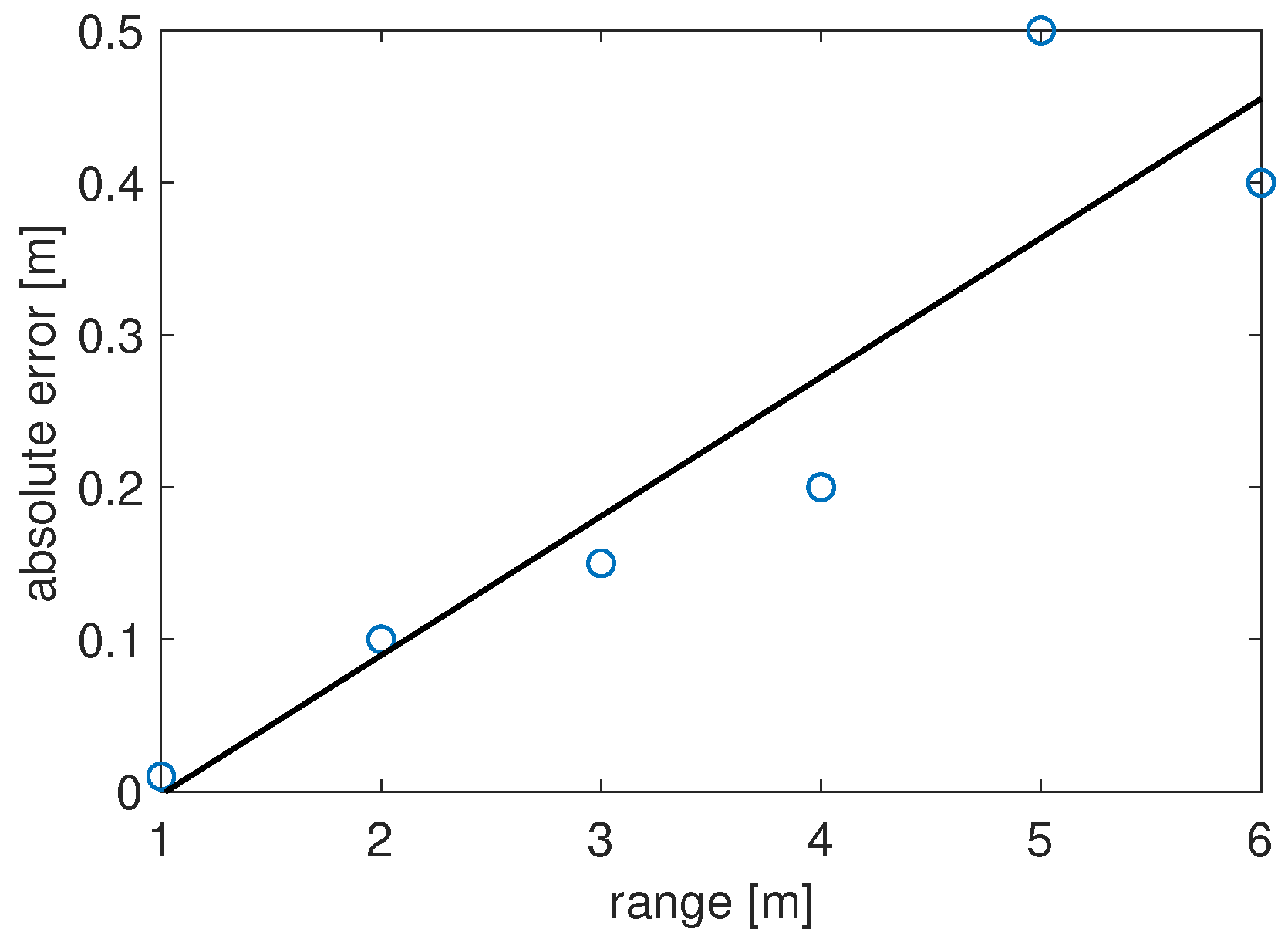
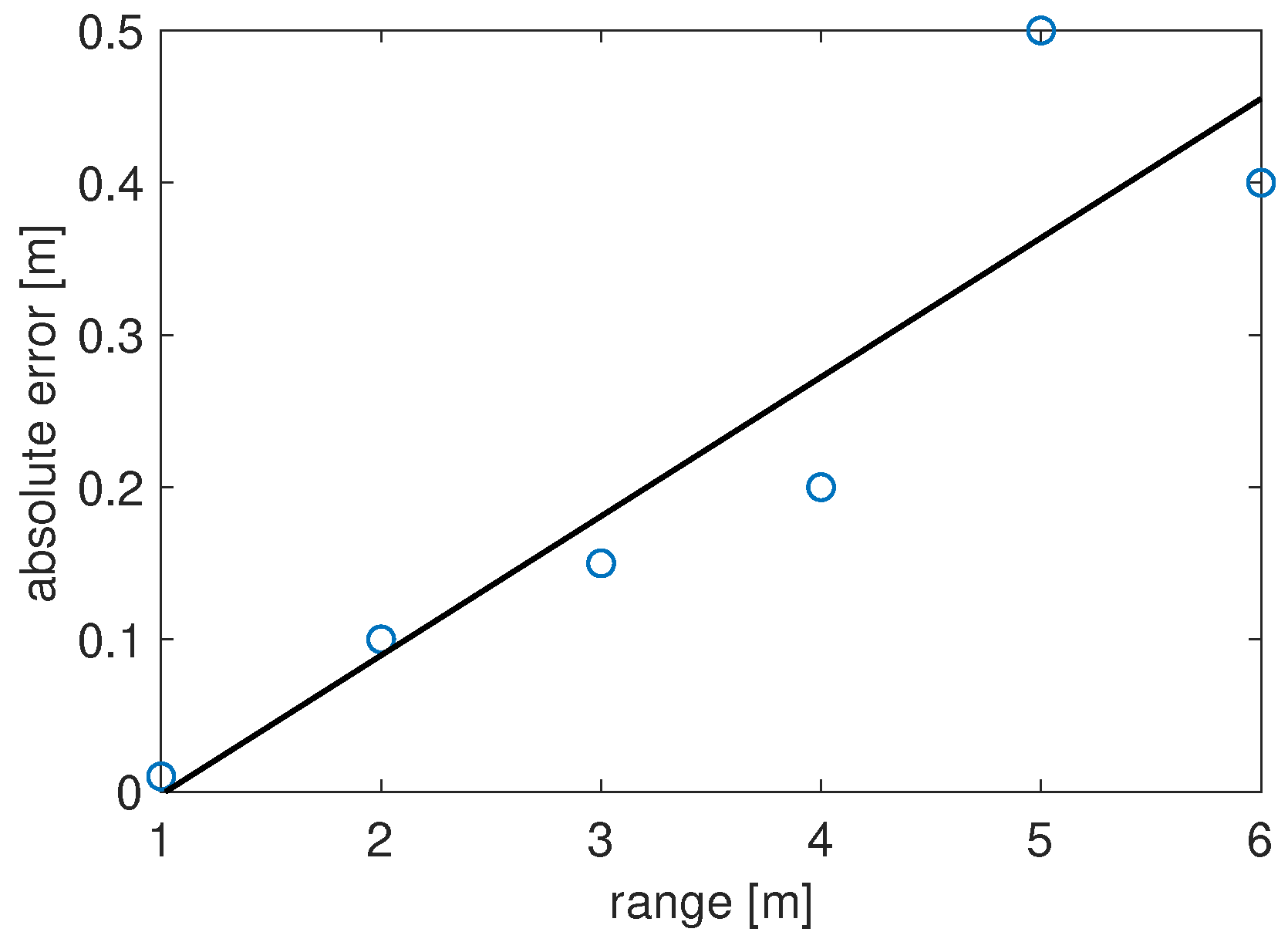
Finally, the absolute error was also evaluated, i.e.,
to better quantify the achieved accuracy. The graph in
Figure 11 shows the results for a range varying between 1 and 6 m. As it can be noticed, the absolute error increases with the distance: it is a few centimeters for the short-range echo-location and it is about half a meter for distances between 5 and 6 m.
For longer distances, the performance starts to degrade. To corroborate the results, we performed several tests under different high noise environments. In particular, we performed worst-case experiments by introducing a source of white noise in the acoustic environment, which thus affects both the audible and inaudible bands. Results show that the proposed DFCE system is robust to severe environmental noise (even 80 dB) without any appreciable deviation in the measured error, provided that the signal stands out (even slightly) from the noise level, i.e., the SNR is above 0 dB. For environments where signal and noise are comparable in power (around 0 dB SNR) the estimator becomes imprecise, since the signal is completely buried below the noise level.
5. Conclusions
The paper investigated the feasibility of a “Dual-Function” system for acoustic ranging and communication in inaudible band, using off-the-shelf devices. While dual-function transceivers are more typical of RF systems, interest in acoustic solutions as an alternative to RF has recently increased. This is not limited to electromagnetic-denied scenarios but is also motivated by the appeal of having an additional dedicated channel available, independent of RF, to ensure continuity of some critical services, especially in areas where the EM spectrum may be heavily congested.
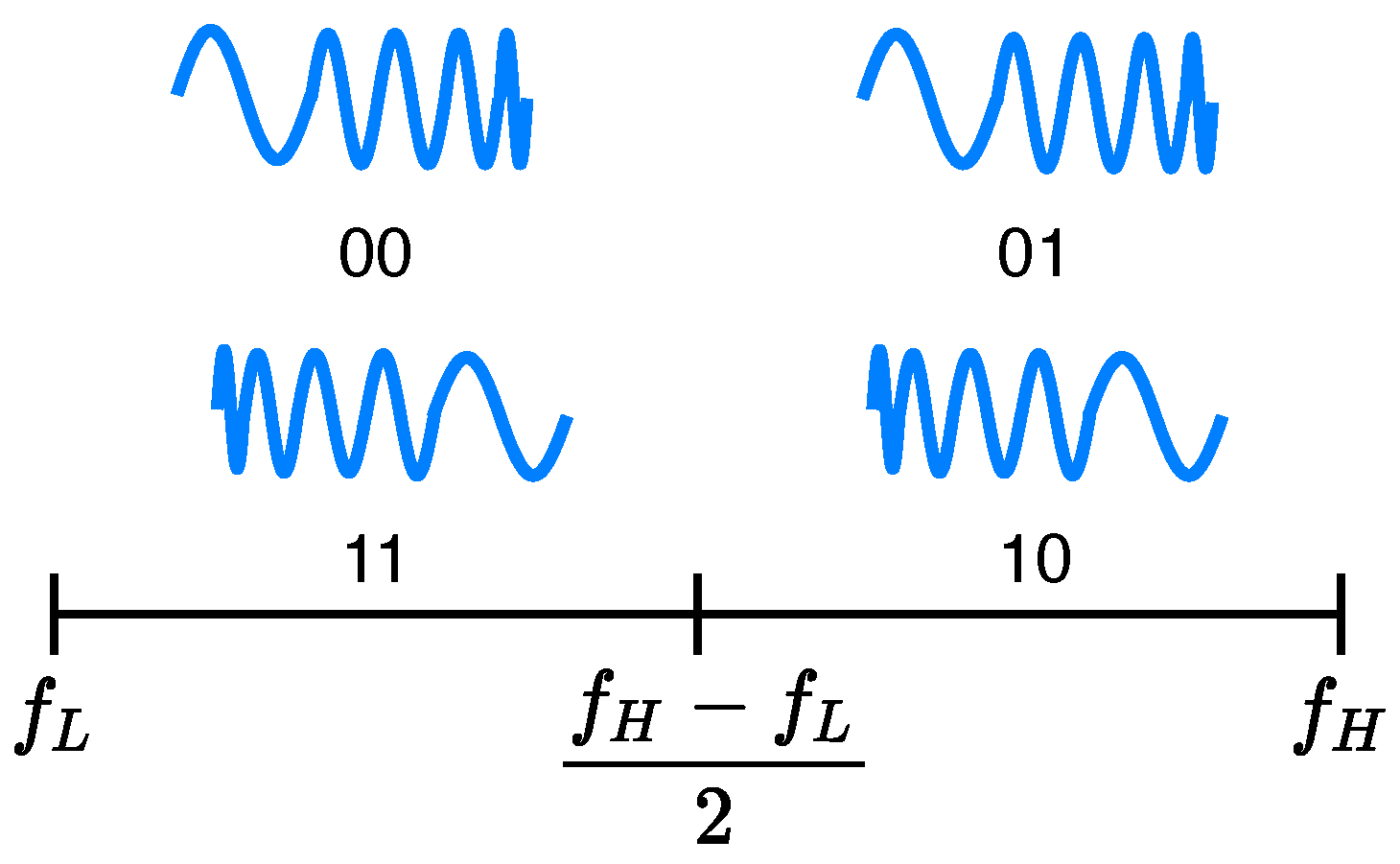
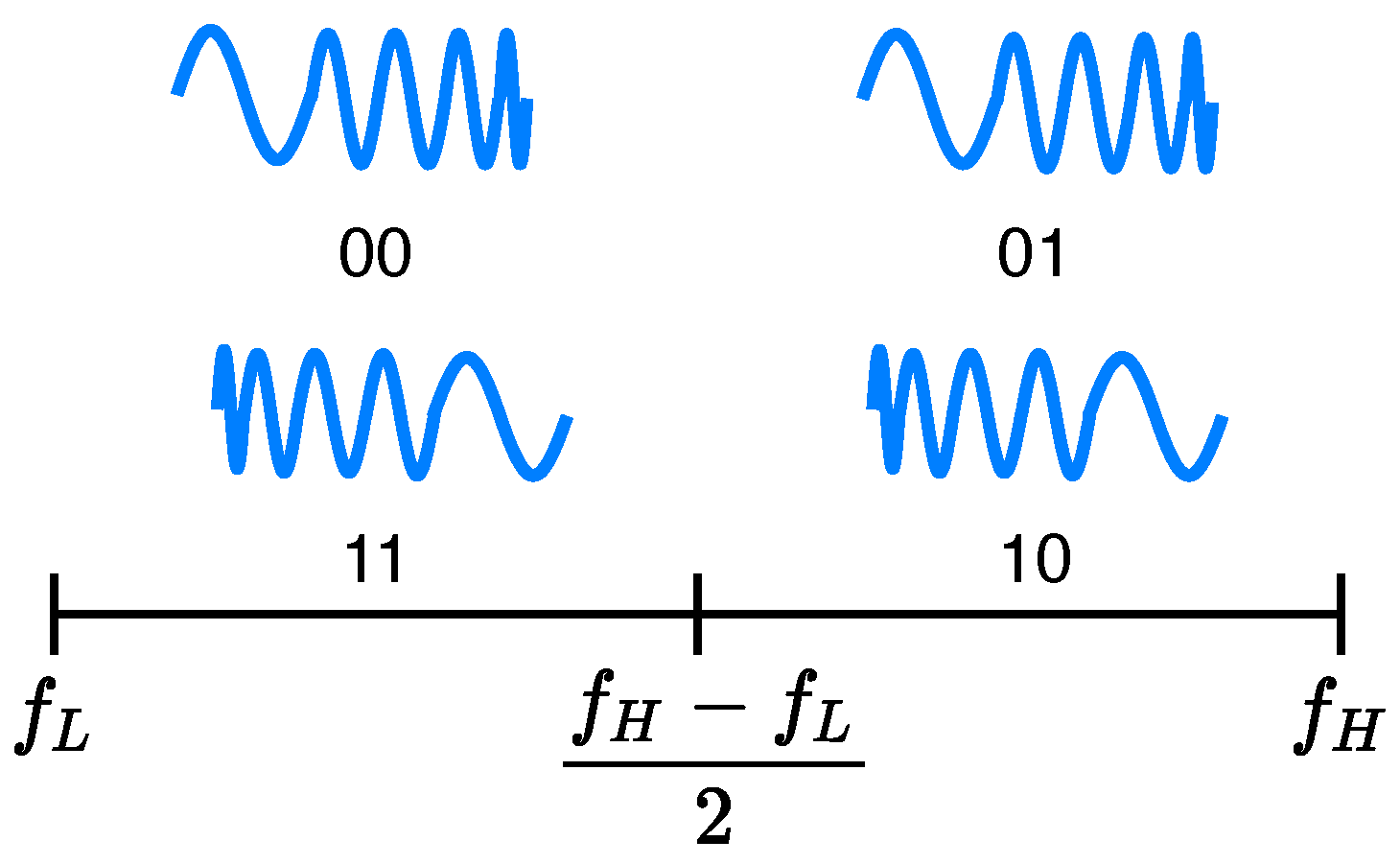
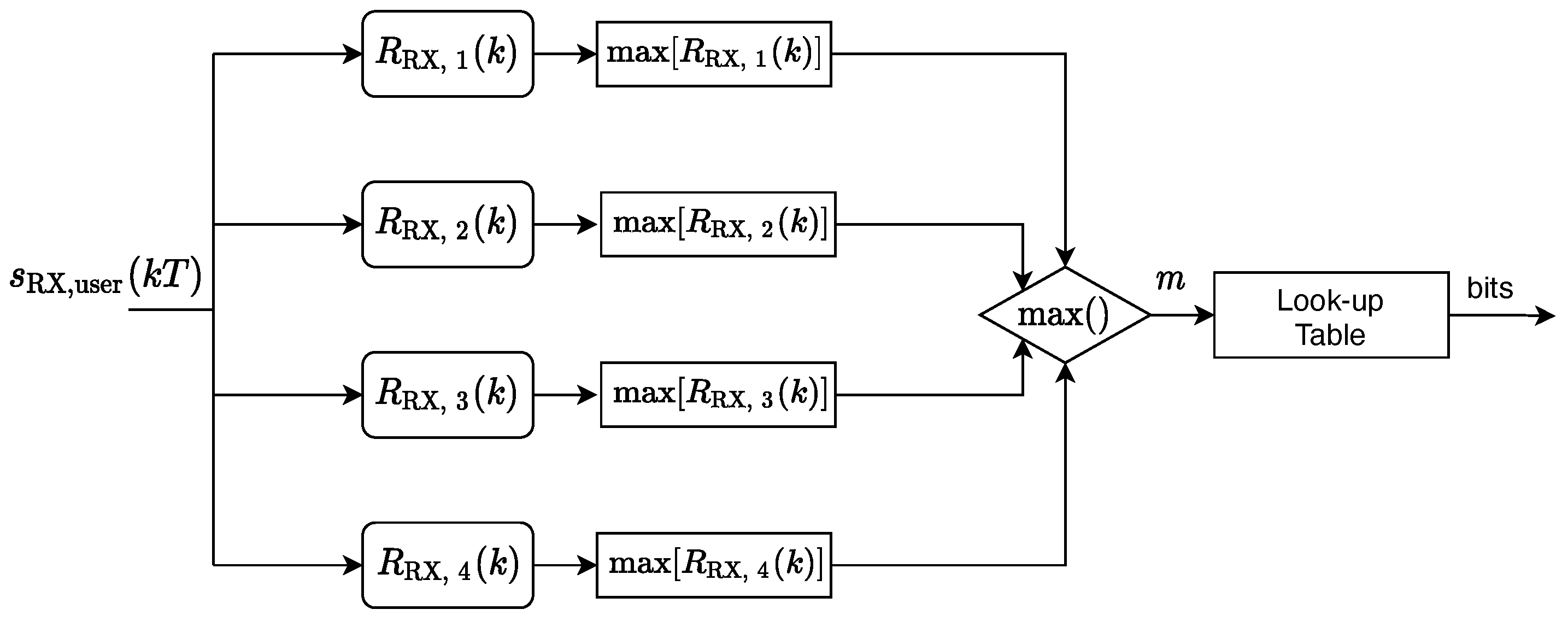
Our design of the DFCE system focused on the inaudible band, in particular the 18–22 kHz band, where microphone transducers are still sensitive to sound waves while the human ear is not. A suitable waveform was selected for signal modulation, which at the same time can be effectively used for echo-location; in particular, a chirp modulation was considered, where a sequence of pulses with different slopes (up chirp and down chirp) encode one bit and two frequency subbands encode a second bit, so producing a quaternary digital constellation. This allows the system to transmit data while exhibiting suitable cross-correlation properties to extract the time of flight information from the received echoes, so obtaining a range estimate.
The proposed solution was tested in an outdoor environment to derive the performance of the joint functions. Key performance metrics such as BER, maximum range vs. SNR, and ranging accuracy were computed in several experiments. Results reveal that the echo-locator can guarantee low absolute errors in a range between approximately 1 and 6 m, and in the same interval the communication performance can yield a BER as low as . This shows that even the low-cost DFCE prototype built on the basis of the proposed design can work in practice with satisfactory BER and ranging error. Finally, it emerged that the noise produced by transmitting such acoustic signals in the audible band is slightly perceptible, intermittently, but only at a short distance from the source and in LOS conditions. Therefore, it is very tolerable and often inaudible to the human ear in most practical situations. Possible directions of future work can include the improvement of the communication and ranging performance of the proposed DFCE system, so as to make it applicable also in more complex environments. Another interesting direction that can be investigated is the extension of the DFCE system functionalities in multi-user scenarios. For these contexts, suitable mechanisms need to be devised in order to manage in particular the multiple access channel.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}