



Self-Sensing Antenna for Soil Moisture: Beacon Approach




Abstract
1. Introduction
2. Hardware Implementation of LoRa-Based Soil Moisture Sensing
3. Sensing Algorithm
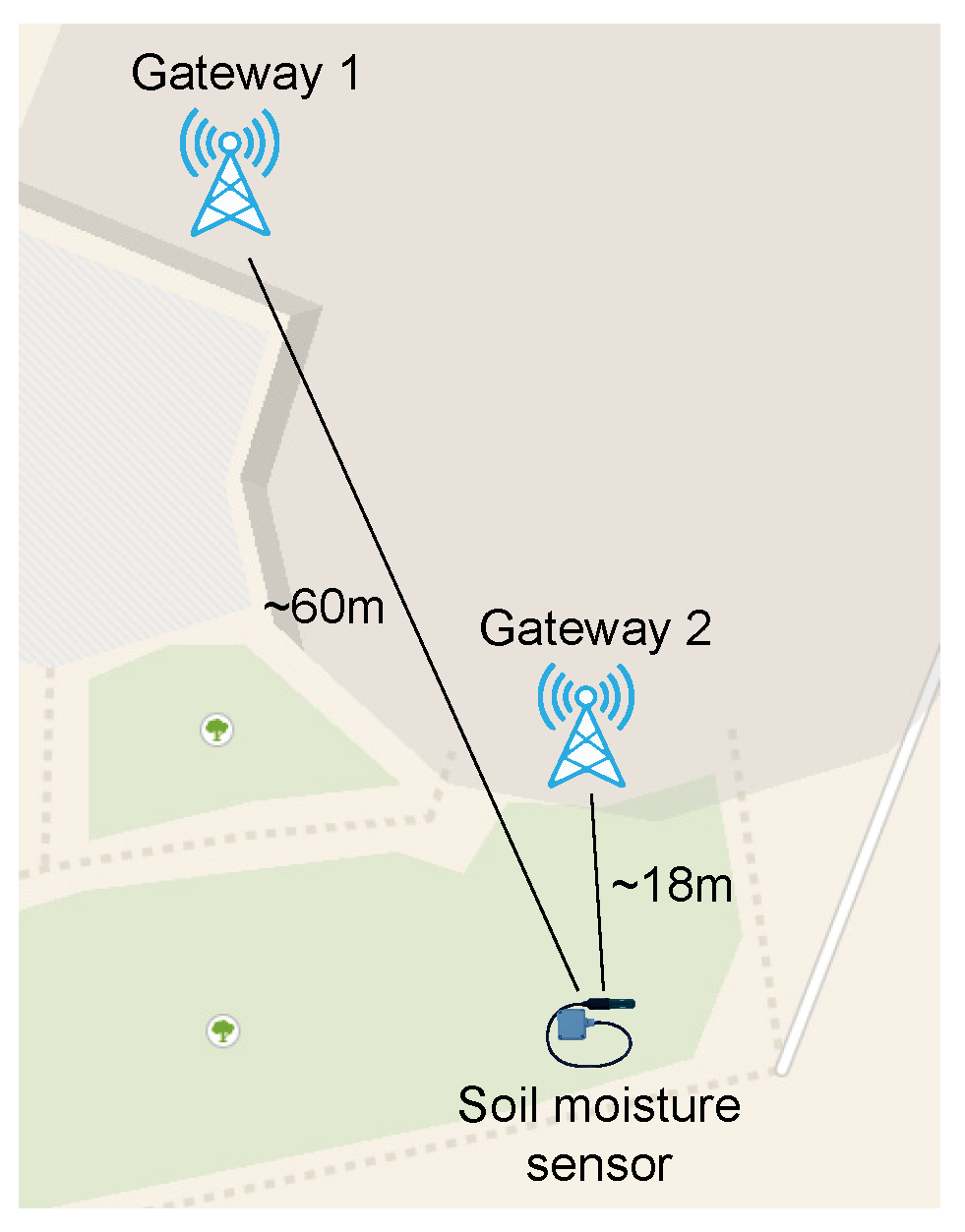
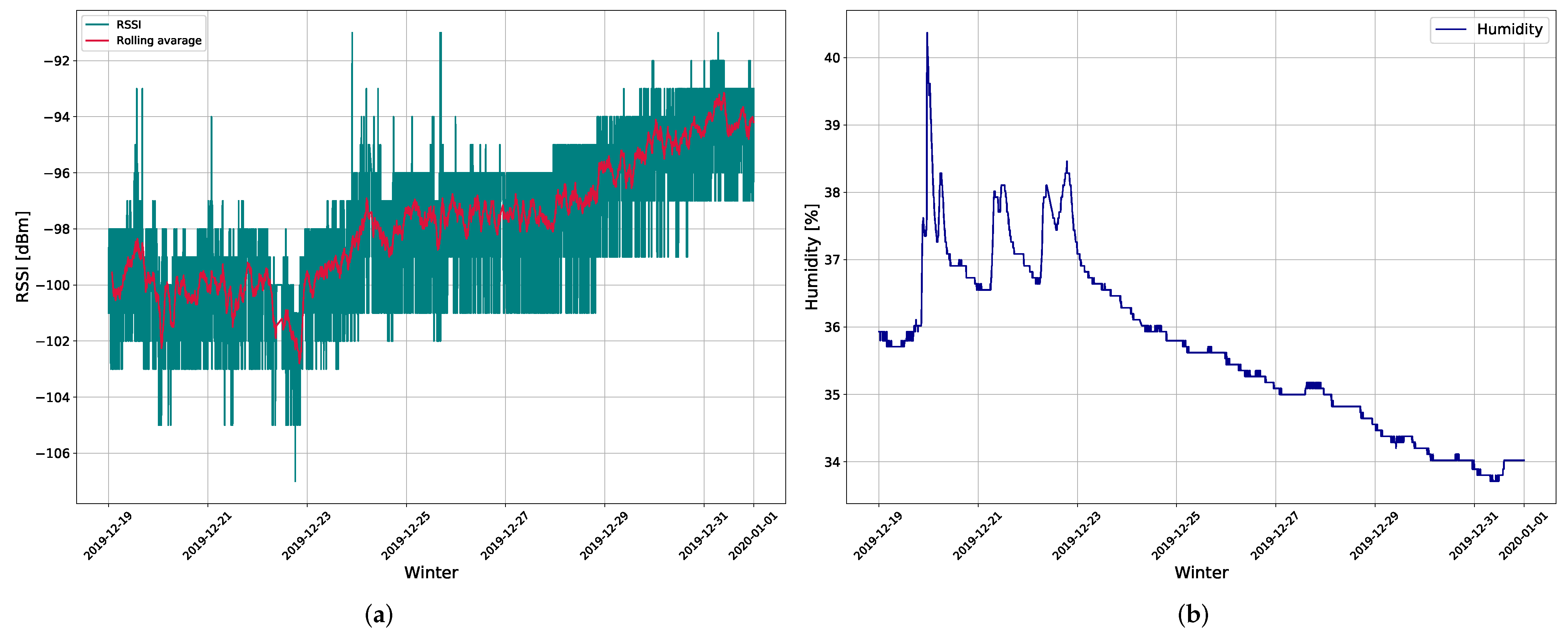
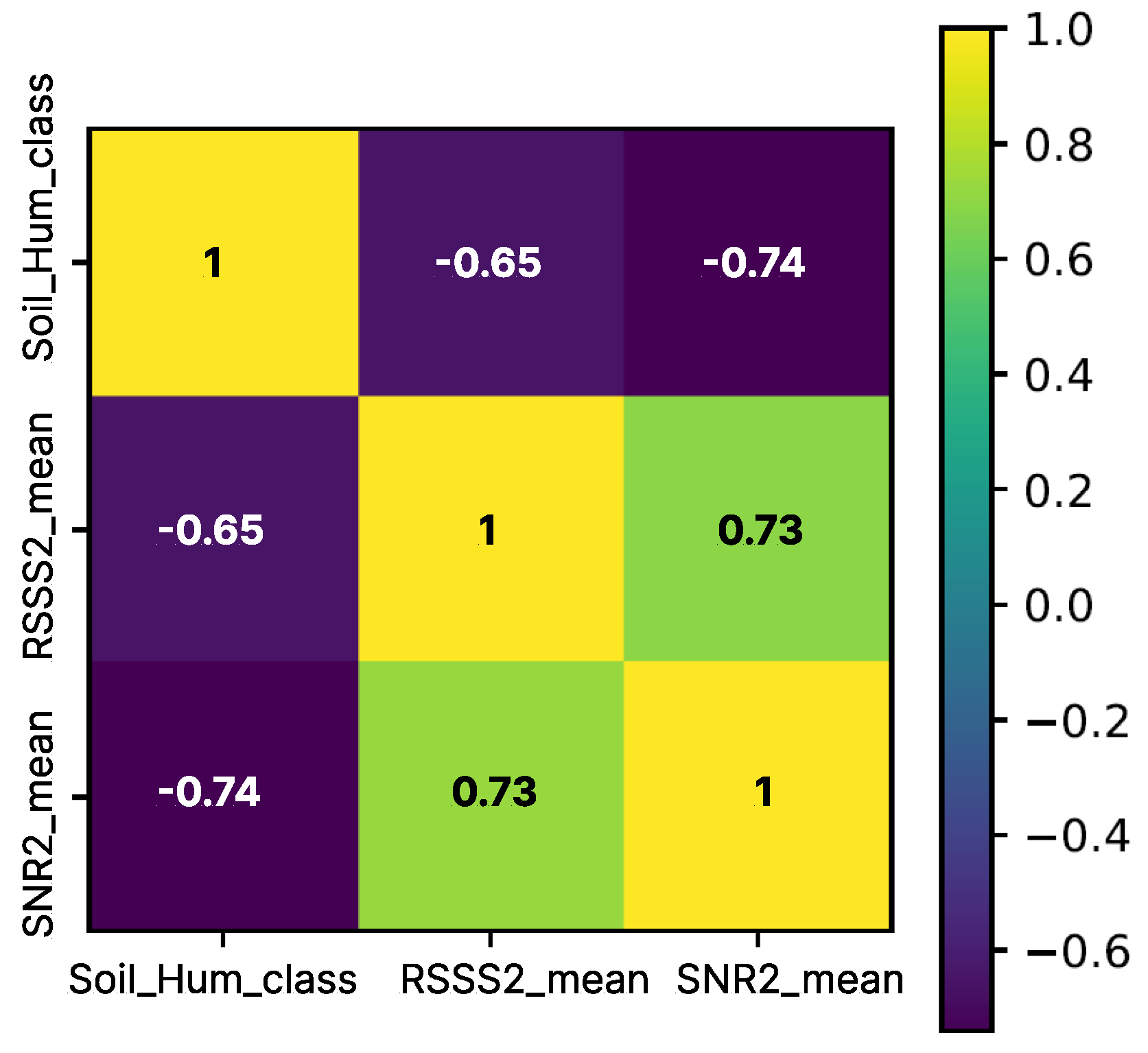
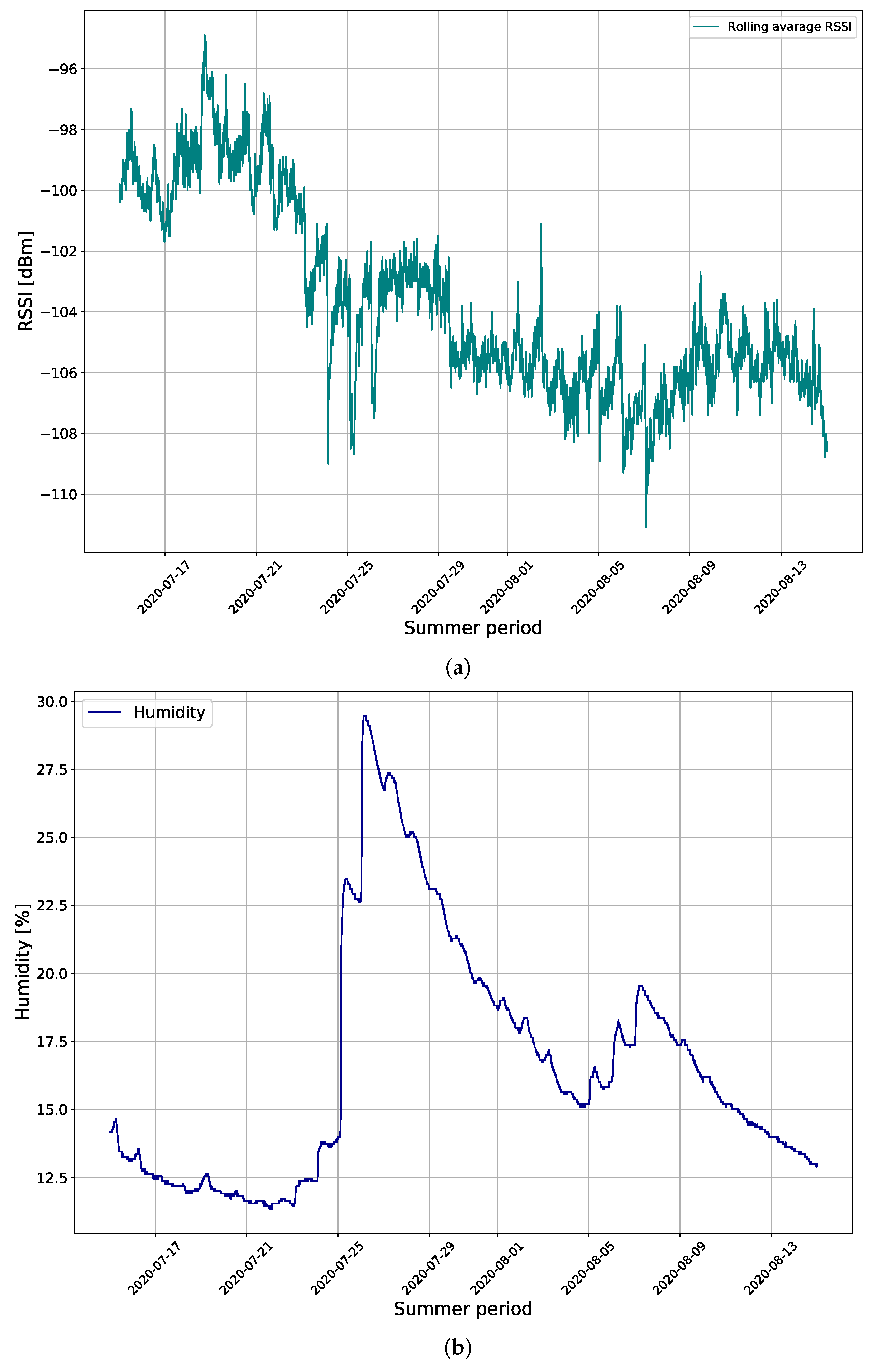
3.1. Analysis of Collected Data from LoRaWAN-Based Soil Moisture Sensor
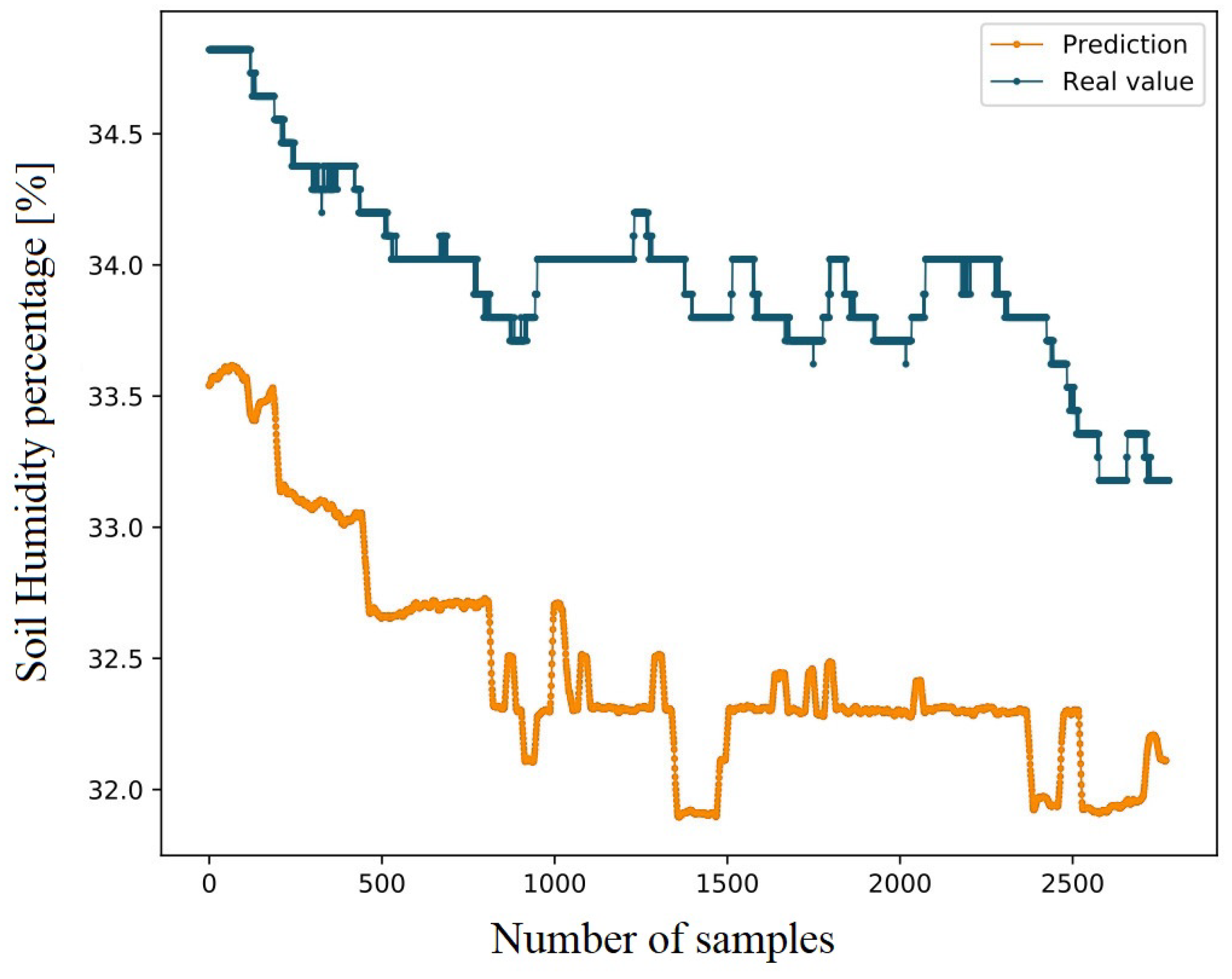
3.2. Machine Learning Approach and Model
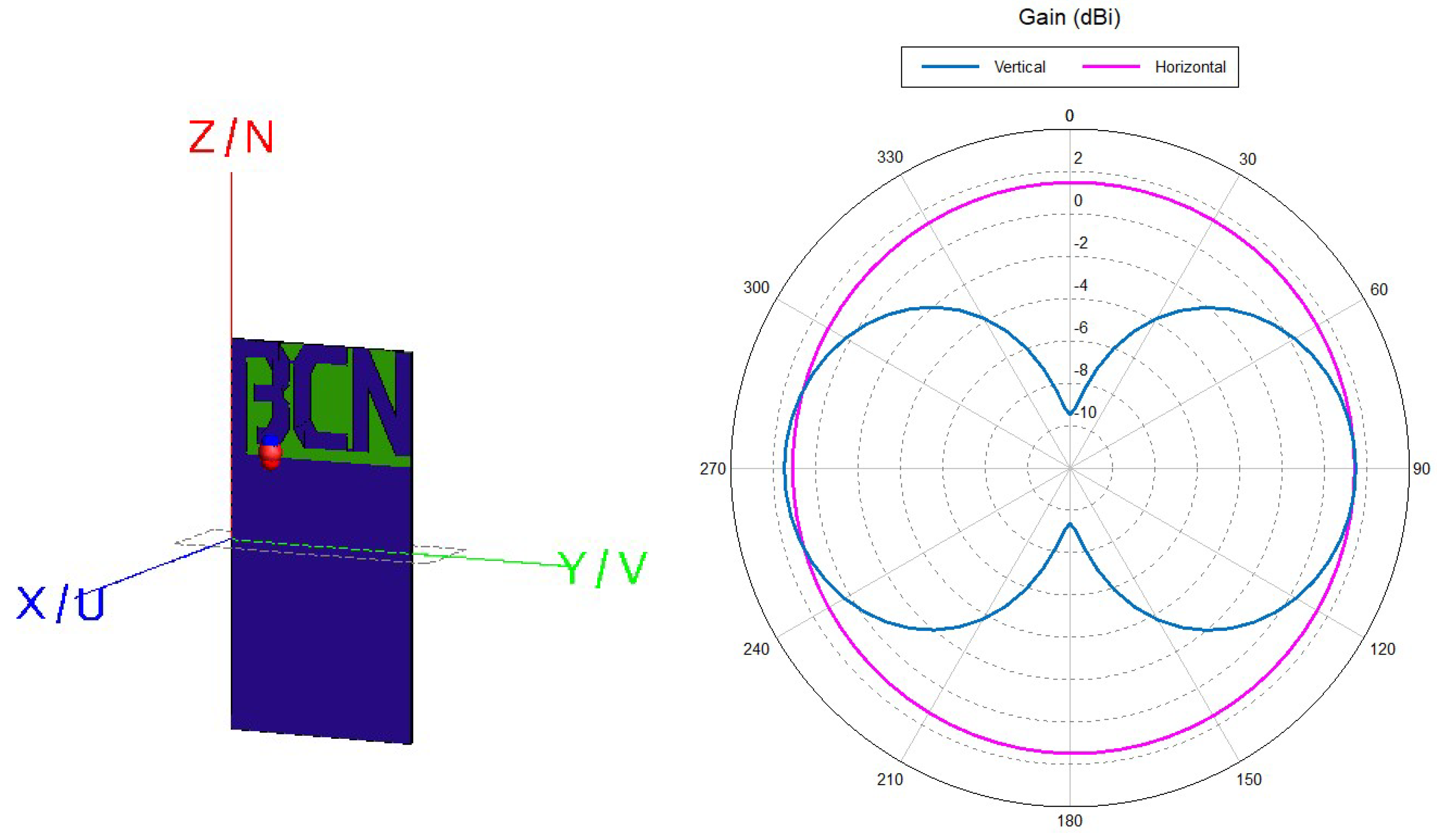
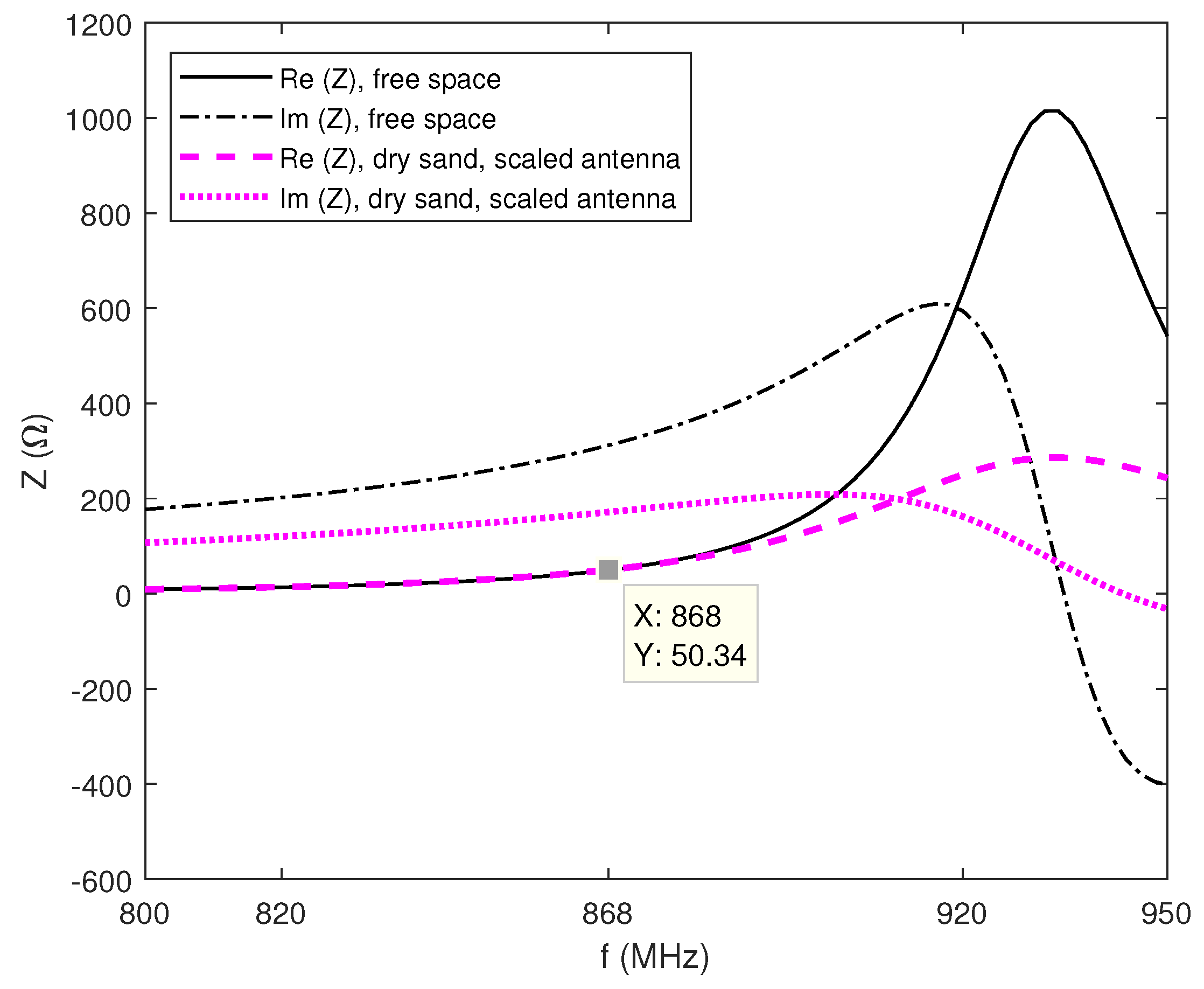
4. The Optimization of the IoT Antenna Design for Underground Application
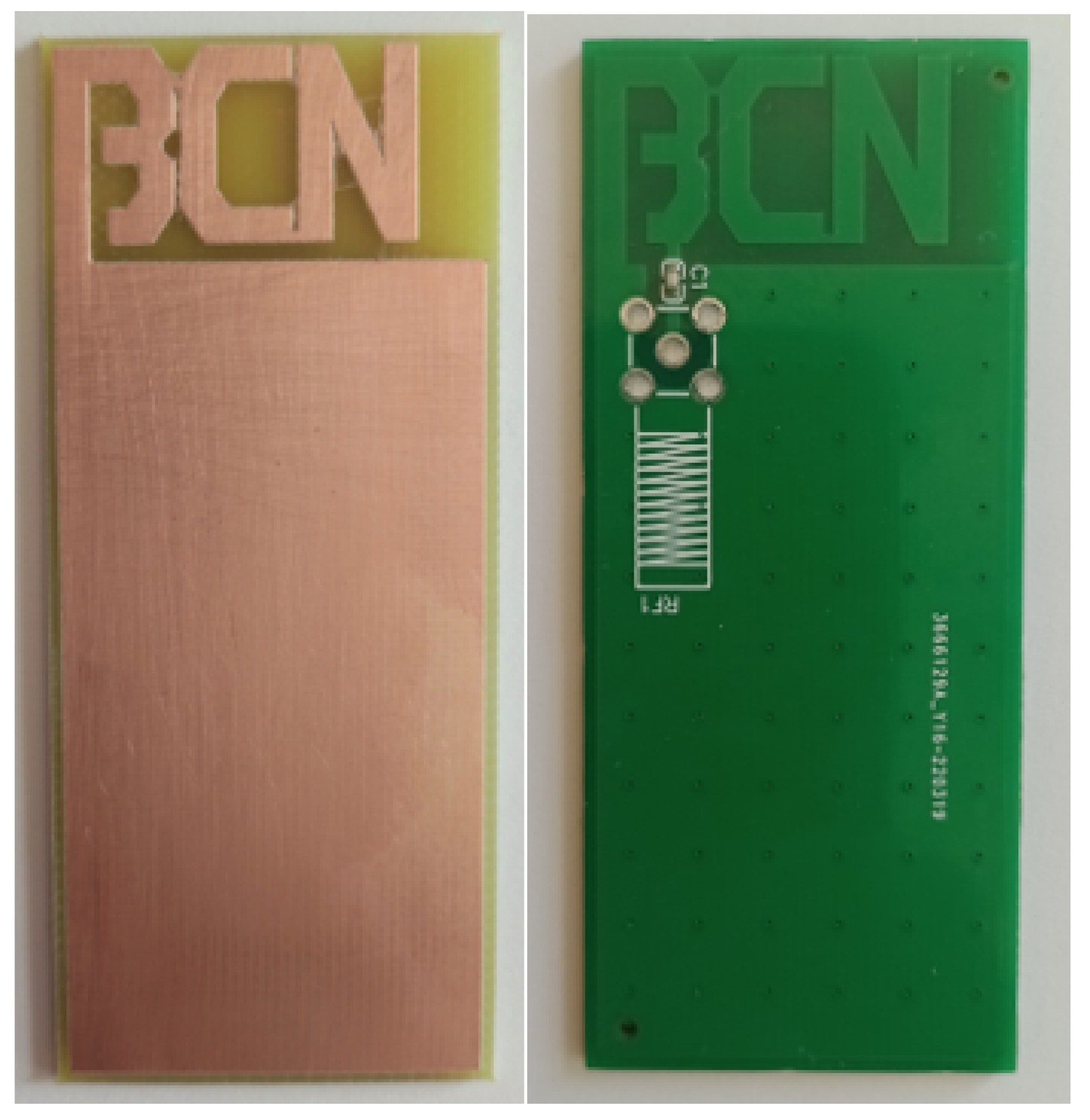
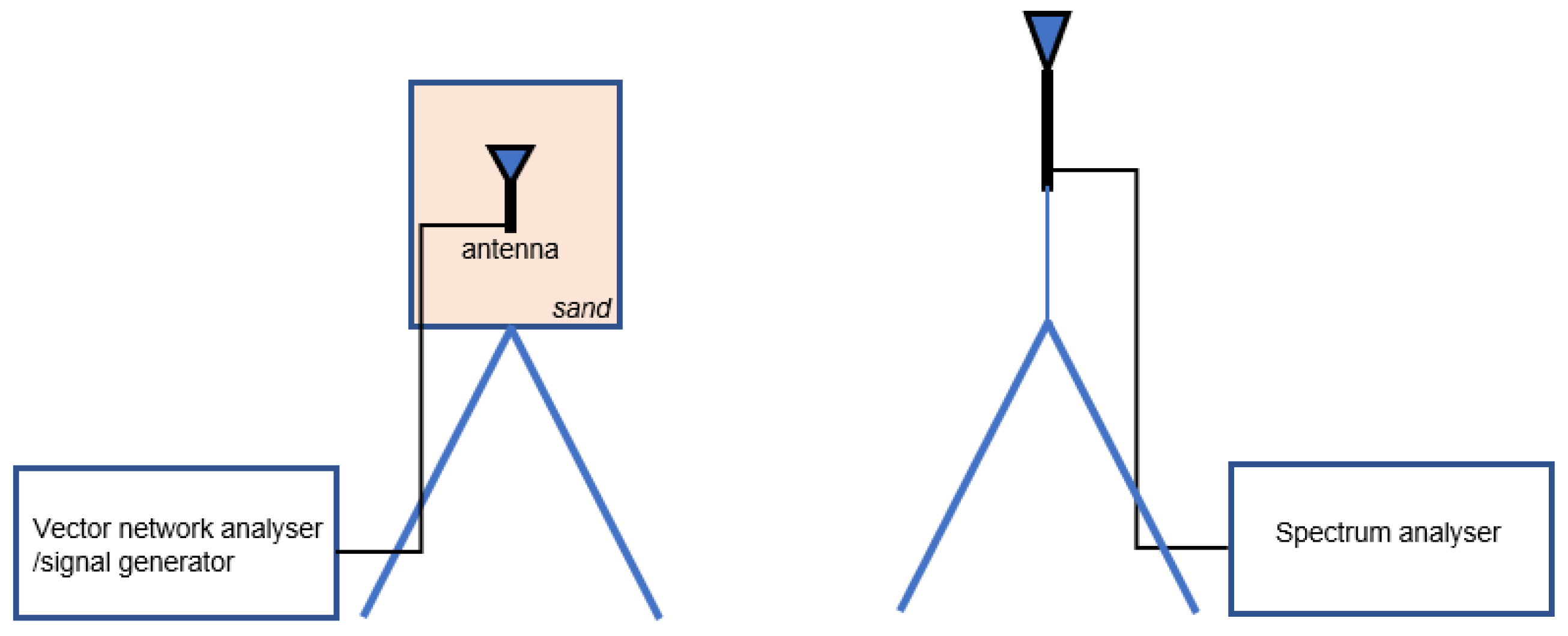
5. Proof-of-Concept Measurements of the Proposed Antenna
6. Conclusions and Future Work
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Salam, A.; Vuran, M.C.; Dong, X.; Argyropoulos, C.; Irmak, S. A Theoretical Model of Underground Dipole Antennas for Communications in Internet of Underground Things. IEEE Trans. Antennas Propag. 2019, 67, 3996–4009. [Google Scholar] [CrossRef]
- Dong, X.; Vuran, M.C.; Irmak, S. Autonomous precision agriculture through integration of wireless underground sensor networks with center pivot irrigation systems. Ad Hoc Netw. 2013, 11, 1975–1987. [Google Scholar] [CrossRef]
- Pérez, M.; Neira, I.L. Microstrip Antenna Design for Underground Water Pipeline Monitoring Sensor. In Proceedings of the 2019 IEEE International Symposium on Antennas and Propagation and USNC-URSI Radio Science Meeting, Atlanta, GA, USA, 7–12 July 2019; pp. 1559–1560. [Google Scholar]
- Renzone, G.D.; Parrino, S.; Peruzzi, G.; Pozzebon, A.; Bertoni, D. LoRaWAN Underground to Aboveground Data Transmission Performances for Different Soil Compositions. IEEE Trans. Instrum. Meas. 2021, 70, 5501713. [Google Scholar] [CrossRef]
- Huang, H.; Shi, J.; Wang, F.; Zhang, D.; Zhang, D. Theoretical and Experimental Studies on the Signal Propagation in Soil for Wireless Underground Sensor Networks. Sensors 2020, 20, 2580. [Google Scholar] [CrossRef] [PubMed]
- Rodić, L.D.; Županović, T.; Perković, T.; Šolić, P.; Rodrigues, J.J.P.C. Machine Learning and Soil Humidity Sensing: Signal Strength Approach. ACM Trans. Internet Technol. 2022, 22, 2. [Google Scholar] [CrossRef]
- Zemmour, H.; Baudoin, G.; Diet, A. Soil Effects on the Underground-to-Aboveground Communication Link in Ultrawideband Wireless Underground Sensor Networks. IEEE Antennas Wirel. Propag. Lett. 2017, 16, 218–221. [Google Scholar] [CrossRef]
- Priyaa, A.S.P.; Mohammed, A.; Ambili, C.; Anusree, N.S.; Thekekara, A.V.; Mohan, R.R.; Mridula, S. Microwave Sensor Antenna for Soil Moisture Measurement. In Proceedings of the 2015 Fifth International Conference on Advances in Computing and Communications (ICACC), Kochi, India, 3–5 September 2015; pp. 258–262. [Google Scholar]
- Tiusanen, M.J. Wideband Antenna for Underground Soil Scout Transmission. IEEE Antennas Wirel. Propag. Lett. 2006, 5, 517–519. [Google Scholar] [CrossRef]
- Marcus, H.; Hoyle, D. Underground Wireless Data Transmission Using 433-MHz LoRa for Agriculture. Sensors 2019, 19, 4232. [Google Scholar] [CrossRef] [PubMed]
- Moiroux-Arvis, L.; Cariou, C.; Chanet, J.-P. Evaluation of LoRa technology in 433-MHz and 868-MHz for underground to aboveground data transmission. Comput. Electron. Agric. 2022, 194, 106770. [Google Scholar] [CrossRef]
- Škiljo, M.; Blažević, Z.; Šolić, P.; Perković, T. Small printed antenna for soil sensors. In Proceedings of the 2021 6th International Conference on Smart and Sustainable Technologies (SpliTech), Bol and Split, Croatia, 8–11 September 2021. [Google Scholar]
- Šolić, P.; Kapetanović, A.L.; Županović, T.; Kovačević, I.; Perković, T.; Popovski, P. IoT Wallet: Machine Learning-based Sensor Portfolio Application. In Proceedings of the 2020 5th International Conference on Smart and Sustainable Technologies (SpliTech), Virtual, 23–26 September 2020; pp. 1–5. [Google Scholar]
- Lee, J.S.; Miller, L.E. CMDA Systems Engineering Handbook; Artech House, Inc.: New York, NY, USA, 1998. [Google Scholar]
- Liakos, K.G.; Busato, P.; Moshou, D.; Pearson, S.; Bochtis, D. Machine Learning in Agriculture: A Review. Sensors 2018, 18, 2674. [Google Scholar] [CrossRef] [PubMed]
- Cui, L.; Yang, S.; Chen, F.; Ming, Z.; Lu, N.; Qin, J. A survey on application of machine learning for Internet of Things. Int. J. Mach. Learn. Cyber. 2018, 9, 1399–1417. [Google Scholar] [CrossRef]
- Angra, S.; Ahuja, S. Machine learning and its applications: A review. In Proceedings of the 2017 International Conference on Big Data Analytics and Computational Intelligence (ICBDAC), Andhra Pradesh, India, 23–25 March 2017; pp. 57–60. [Google Scholar] [CrossRef]
- Mohammadi, M.; Al-Fuqaha, A.; Sorour, S.; Guizani, M. Deep learning for IoT big data and streaming analytics: A survey. IEEE Commun. Surv. Tutor. 2018, 20, 2923–2960. [Google Scholar] [CrossRef]
- Li, H.; Ota, K.; Dong, M. Learning IoT in Edge: Deep Learning for the Internet of Things with Edge Computing. IEEE Netw. 2018, 32, 96–101. [Google Scholar] [CrossRef]
- Kabir, H.; Khan, M.J.; Brodie, G.; Gupta, D.; Pang, A.; Jacob, M.V.; Antunes, E. Measurement and modelling of soil dielectric properties as a function of soil class and moisture content. J. Microw. Power Electromagn. Energy 2020, 54, 3–18. [Google Scholar] [CrossRef]
- Johnson, R.C. (Ed.) Antenna Engineering Handbook, 3rd ed.; McGraw-Hill: New York, NY, USA, 1993. [Google Scholar]
- King, R.W.P.; Smith, G.S. Antennas in Matter; MIT Press: Cambridge, MA, USA, 1981. [Google Scholar]
- Altair. Available online: https://www.altair.com/feko/ (accessed on 21 November 2022).
- Mohammad, R.; Amir, T. Prognosis of the Effects of Soil Characteristics on the Performance of Landmine Detection in Ground-Penetrating Radar System-A Case Study. In Proceedings of the 2nd International Iranian NDT Conference on Technical Inspection and NDT, Tehran, Iran, October 2008. [Google Scholar]
- Trinh, L.H.; Nguyen, T.Q.K.; Phan, D.D.; Tran, V.Q.; Bui, V.X.; Truong, N.V.; Ferrero, F. Miniature antenna for IoT devices using LoRa technology. In Proceedings of the 2017 International Conference on Advanced Technologies for Communications (ATC), Quynhon City, Vietnam, 18–20 October 2017; pp. 170–173. [Google Scholar] [CrossRef]
- Cheung, C.Y.; Yuen, J.S.M.; Mung, S.W.Y. Miniaturized printed inverted-F antenna for internet of things: A design on PCB with a meandering line and shorting strip. Int. J. Antennas Propag. 2018, 2018, 5172960. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| RSSI | SNR | |
|---|---|---|
| Soil moisture | −0.29 | −0.81 |
| Algorithm | Training Time (s) | Test Time (s) | MAE | MSE |
|---|---|---|---|---|
| SVR | 1.451 | 0.821 | 0.0487 | 0.0243 |
| LSTM | 1385.992 | 0.668 | 0.0104 | 0.00018 |
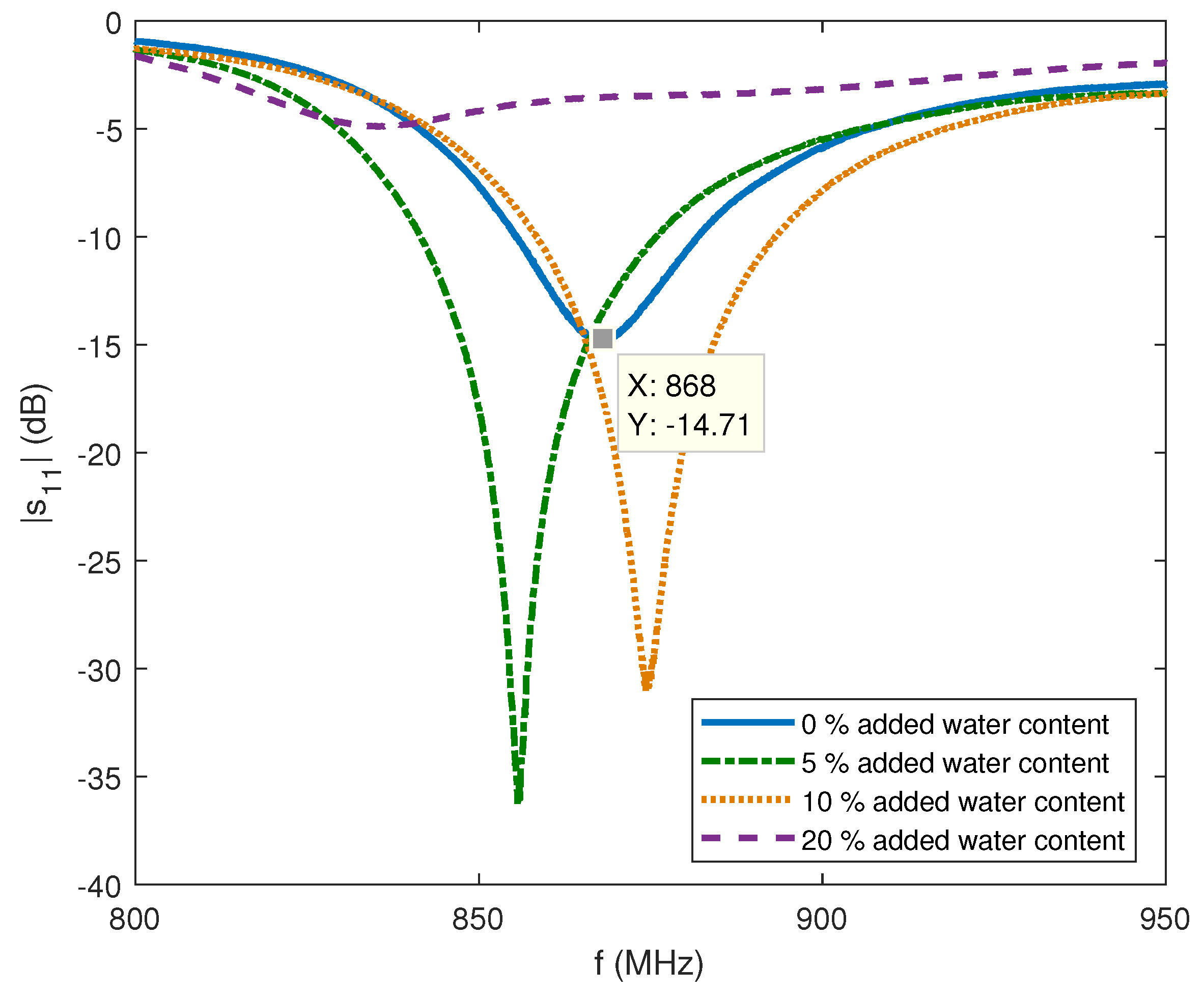
| Moisture Content in Sand | Antenna Impedance () | RL (dB) |
|---|---|---|
| 0% added water content | 50.3 + j0.2 | −47.4 |
| 20% added water content | 12.2 − j142.0 | −0.5 |
| Moisture Content in Sand | Received Power (dBm) |
|---|---|
| 0 % added water content | −40.96 |
| 5 % added water content | −42.82 |
| 10 % added water content | −41.89 |
| 20 % added water content | −50.22 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Škiljo, M.; Blažević, Z.; Dujić-Rodić, L.; Perković, T.; Šolić, P. Self-Sensing Antenna for Soil Moisture: Beacon Approach. Sensors 2022, 22, 9863. https://doi.org/10.3390/s22249863
Škiljo M, Blažević Z, Dujić-Rodić L, Perković T, Šolić P. Self-Sensing Antenna for Soil Moisture: Beacon Approach. Sensors. 2022; 22(24):9863. https://doi.org/10.3390/s22249863
Chicago/Turabian StyleŠkiljo, Maja, Zoran Blažević, Lea Dujić-Rodić, Toni Perković, and Petar Šolić. 2022. "Self-Sensing Antenna for Soil Moisture: Beacon Approach" Sensors 22, no. 24: 9863. https://doi.org/10.3390/s22249863
APA StyleŠkiljo, M., Blažević, Z., Dujić-Rodić, L., Perković, T., & Šolić, P. (2022). Self-Sensing Antenna for Soil Moisture: Beacon Approach. Sensors, 22(24), 9863. https://doi.org/10.3390/s22249863