
Self-Calibrating Magnetometer-Free Inertial Motion Tracking of 2-DoF Joints


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
- Do not make use of magnetometer measurements and are therefore insensitive to magnetic disturbances (otherwise, temporary magnetic disturbances could permanently deteriorate accuracy until calibration is repeated)
- Instead simultaneously estimate the heading offset to facilitate magnetometer-free joint angle tracking.
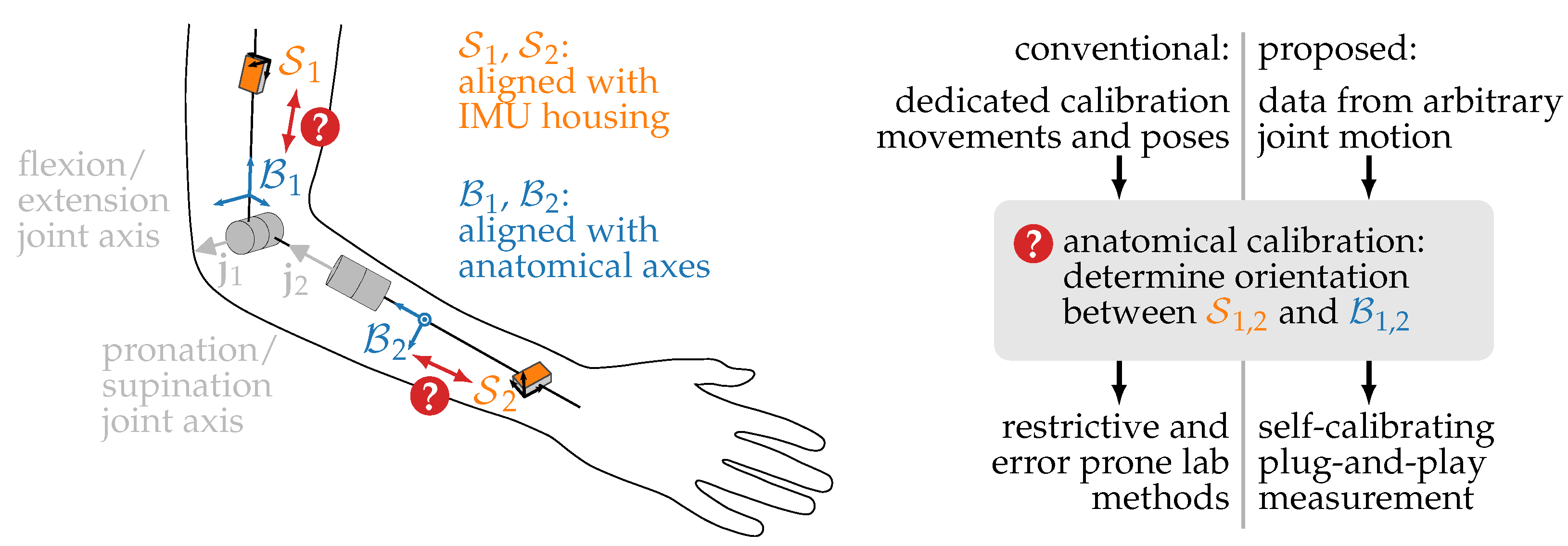
2. Brief Review of the State of the Art in Anatomical Calibration
- Relying on a precisely defined sensor attachment (assumed alignment),
- Calibration via measurements from additional devices (augmented data),
- Calibration based on precisely defined poses or motions (functional alignment),
- Calibration from arbitrary motions (model-based alignment).
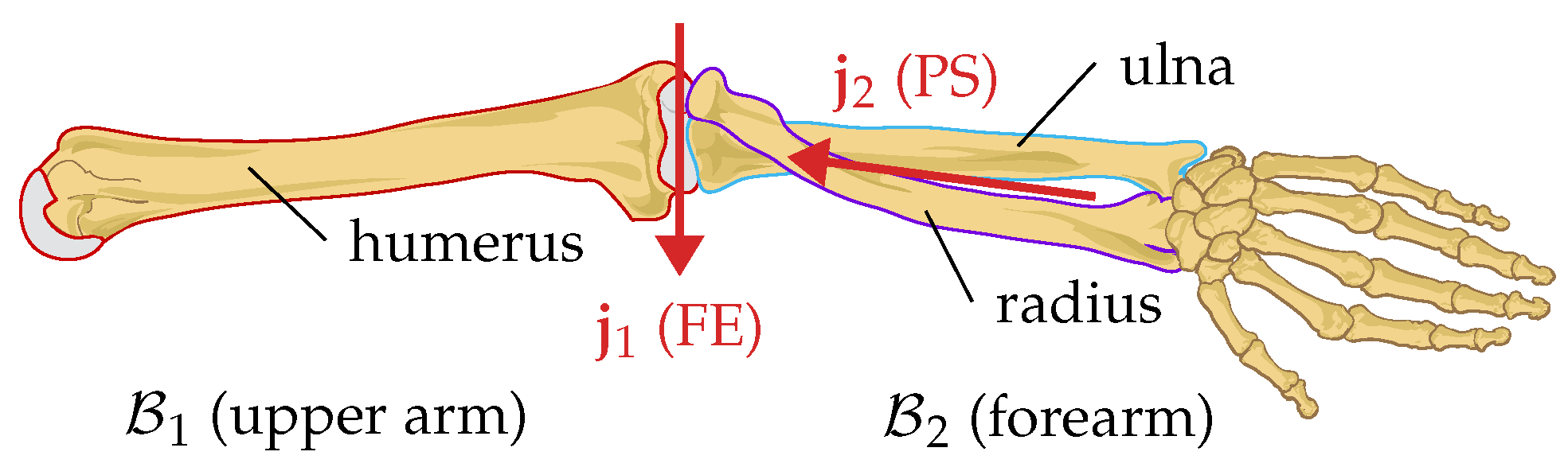
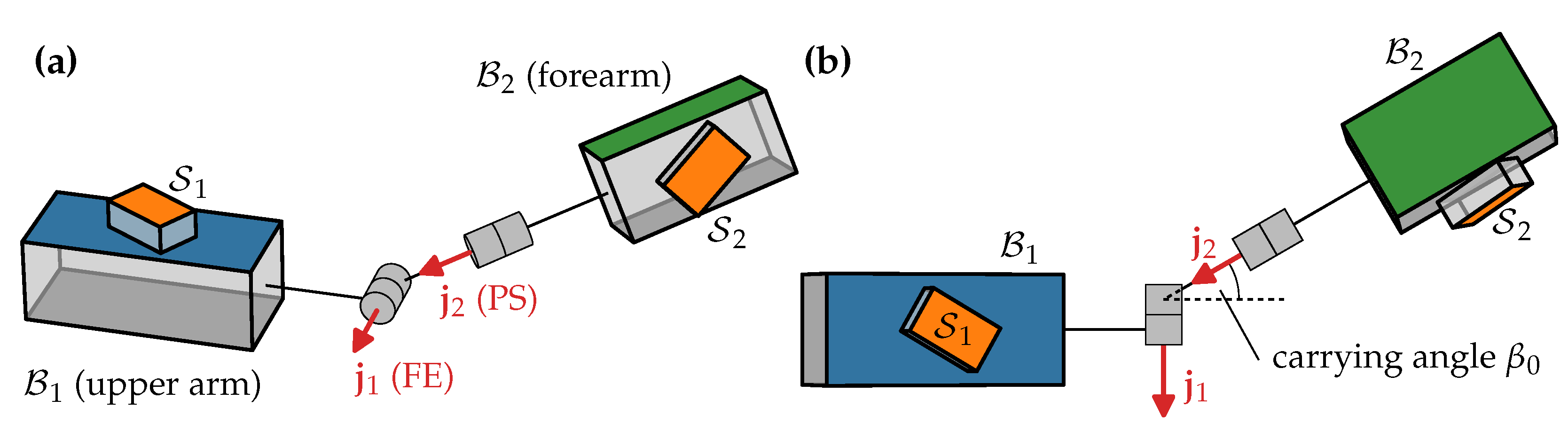
3. Kinematic Model of 2-DoF Joints
4. Proposed Methods
4.1. Rotation-Based Kinematic Joint Constraint
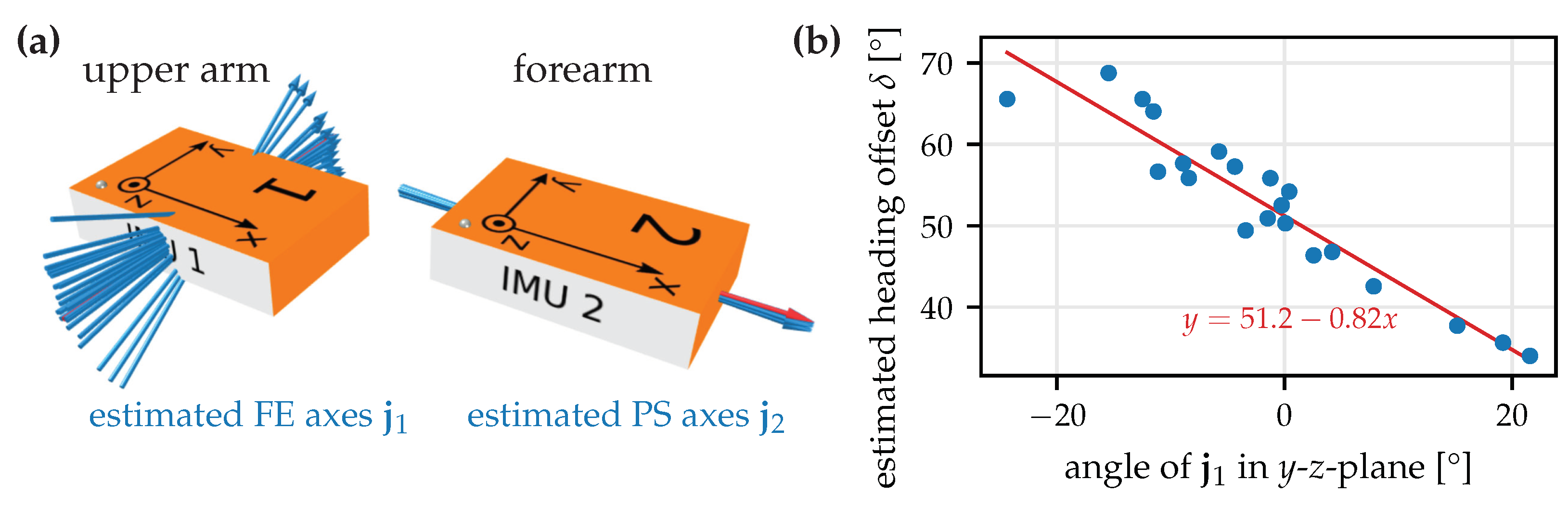
- The common rotation of the whole arm, also observed by IMU as
- The FE rotation around
- The PS rotation around .
4.2. Orientation-Based Kinematic Joint Constraint
4.3. Parametrization of Joint Axes
4.4. Cost Function and Optimization
4.5. Joint Angle Calculation
5. Experimental Evaluation
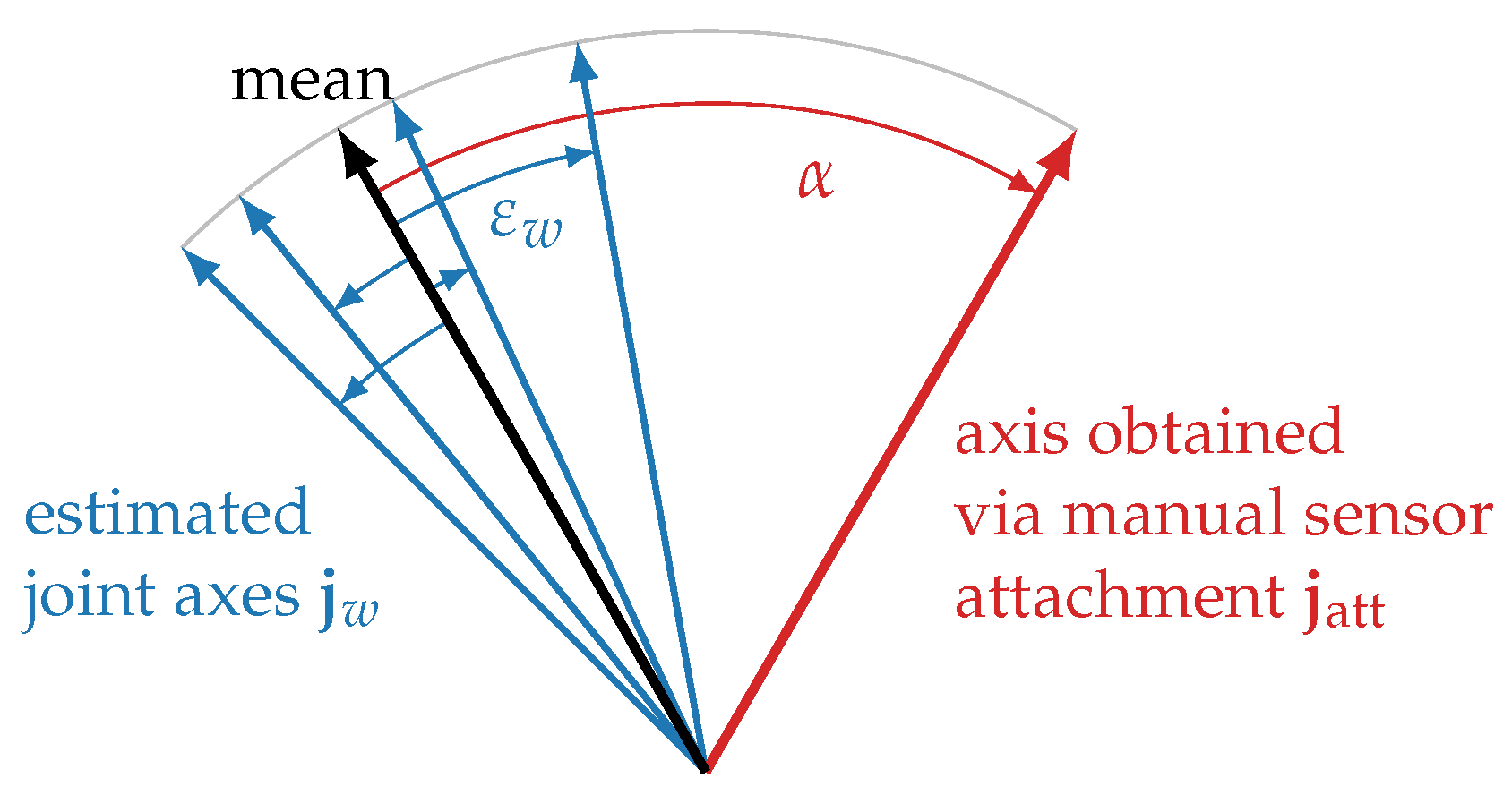
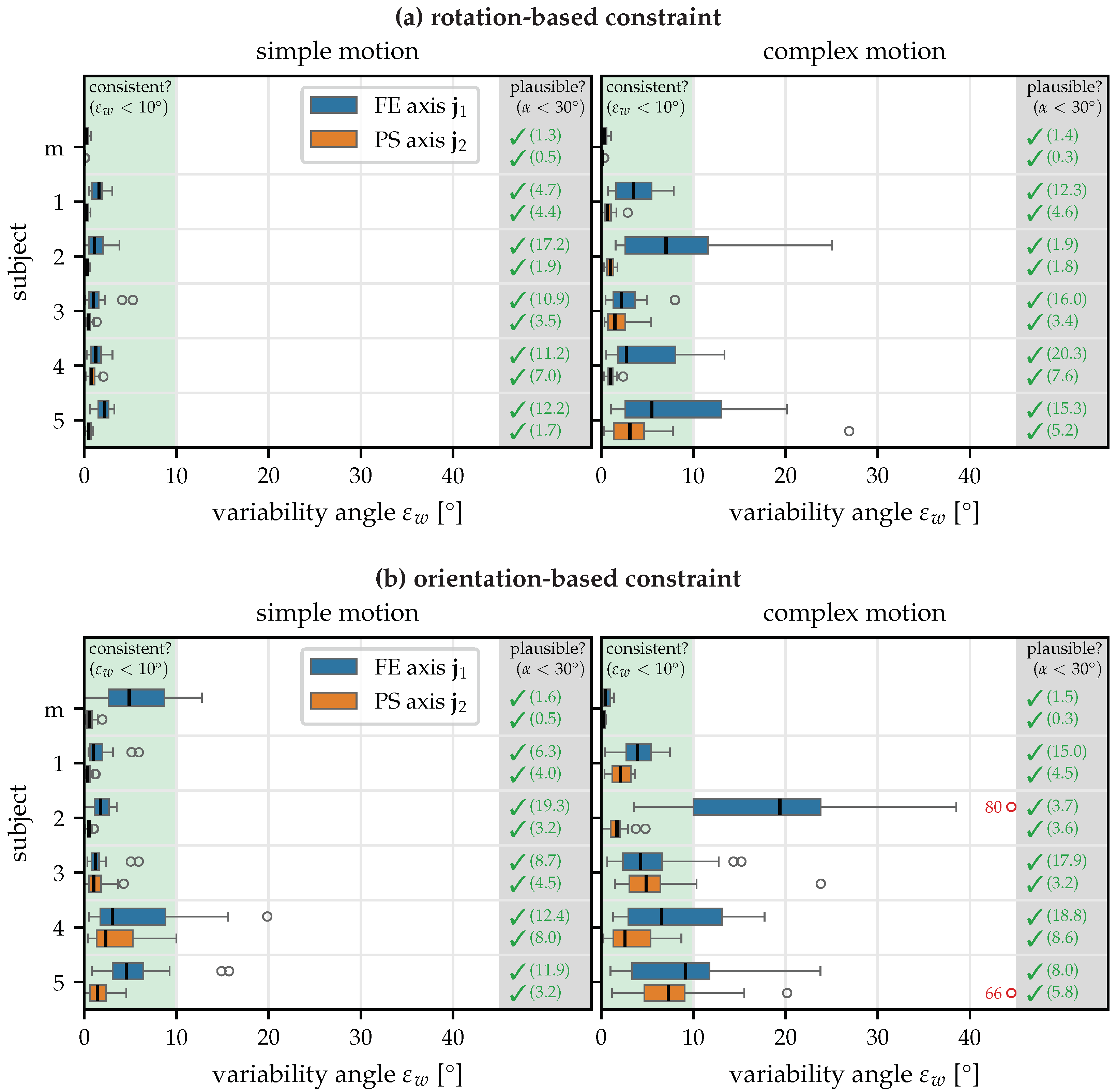
5.1. Robustness of Joint Axis Estimation
- Are the estimated joint axes plausible, i.e., do they agree with the values expected based on careful manual placement?
- Are the estimated joint axes consistent, i.e., do we always obtain the same result when using different parts of the trial?
- The simple motion consists of FE of the elbow and PS of the forearm, performed alternatingly while keeping the longitudinal axes of upper arm and forearm parallel to the sagittal plane.
- For the complex motion, we ask the subject to perform random combinations of FE and PS, allowing for 3D rotation of the shoulder including humeral rotation.
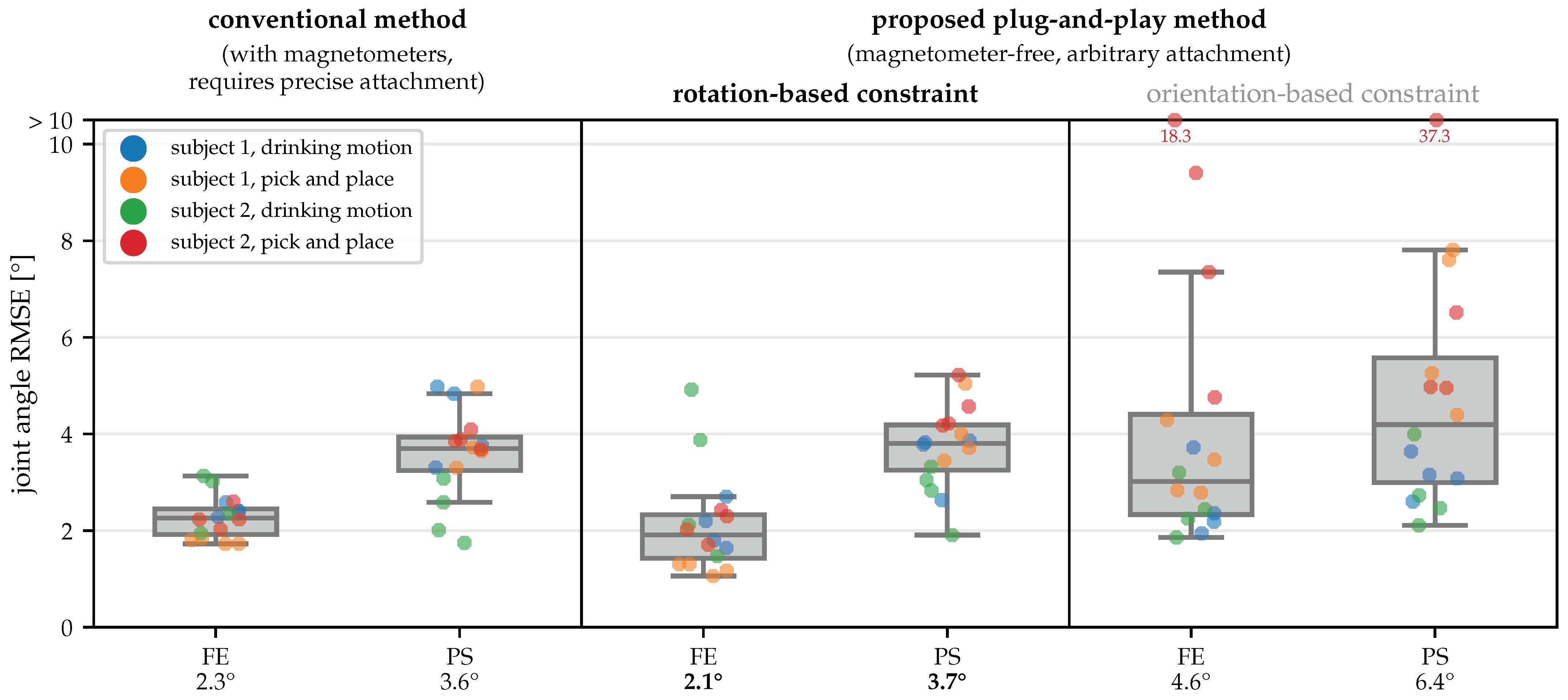
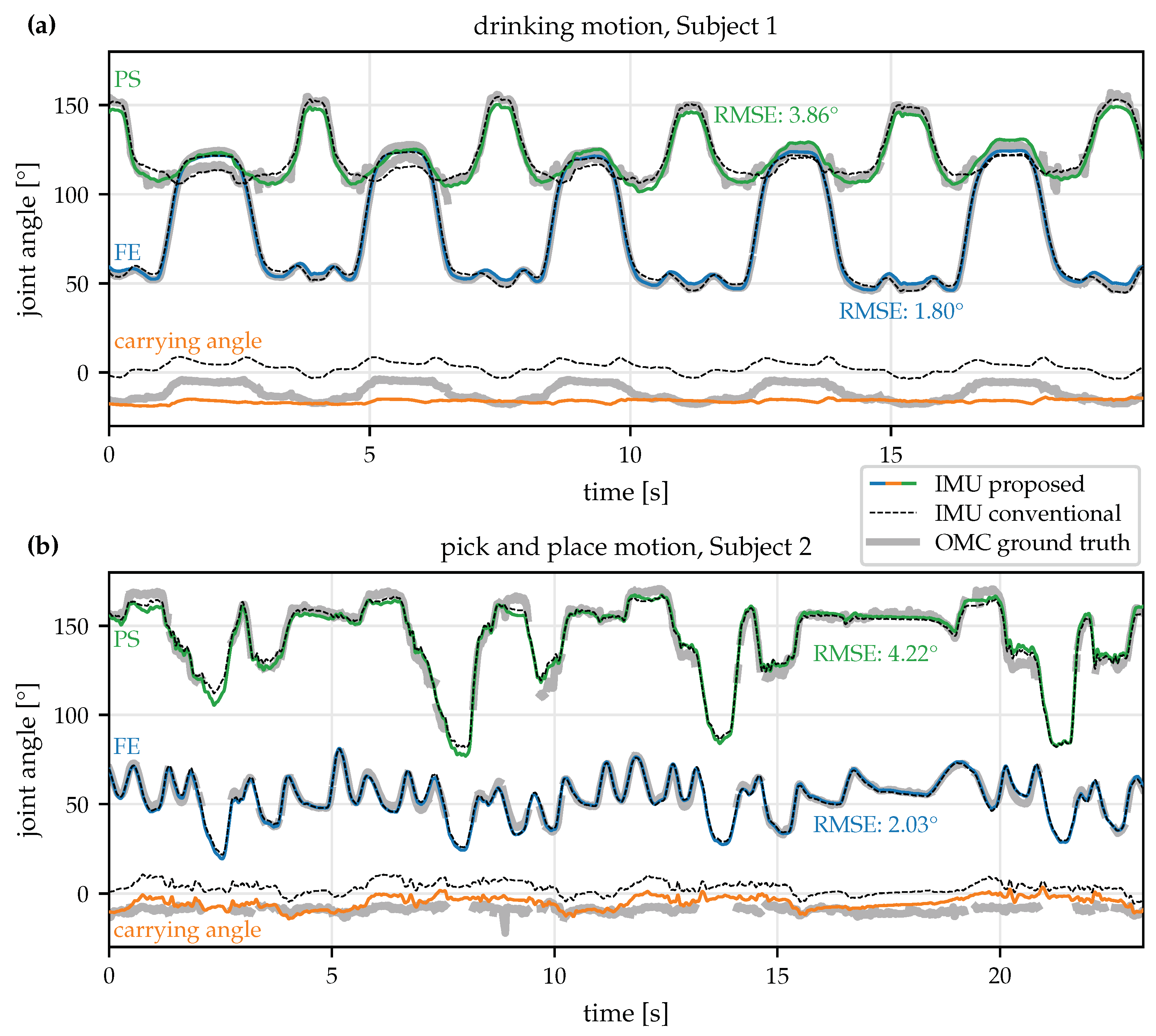
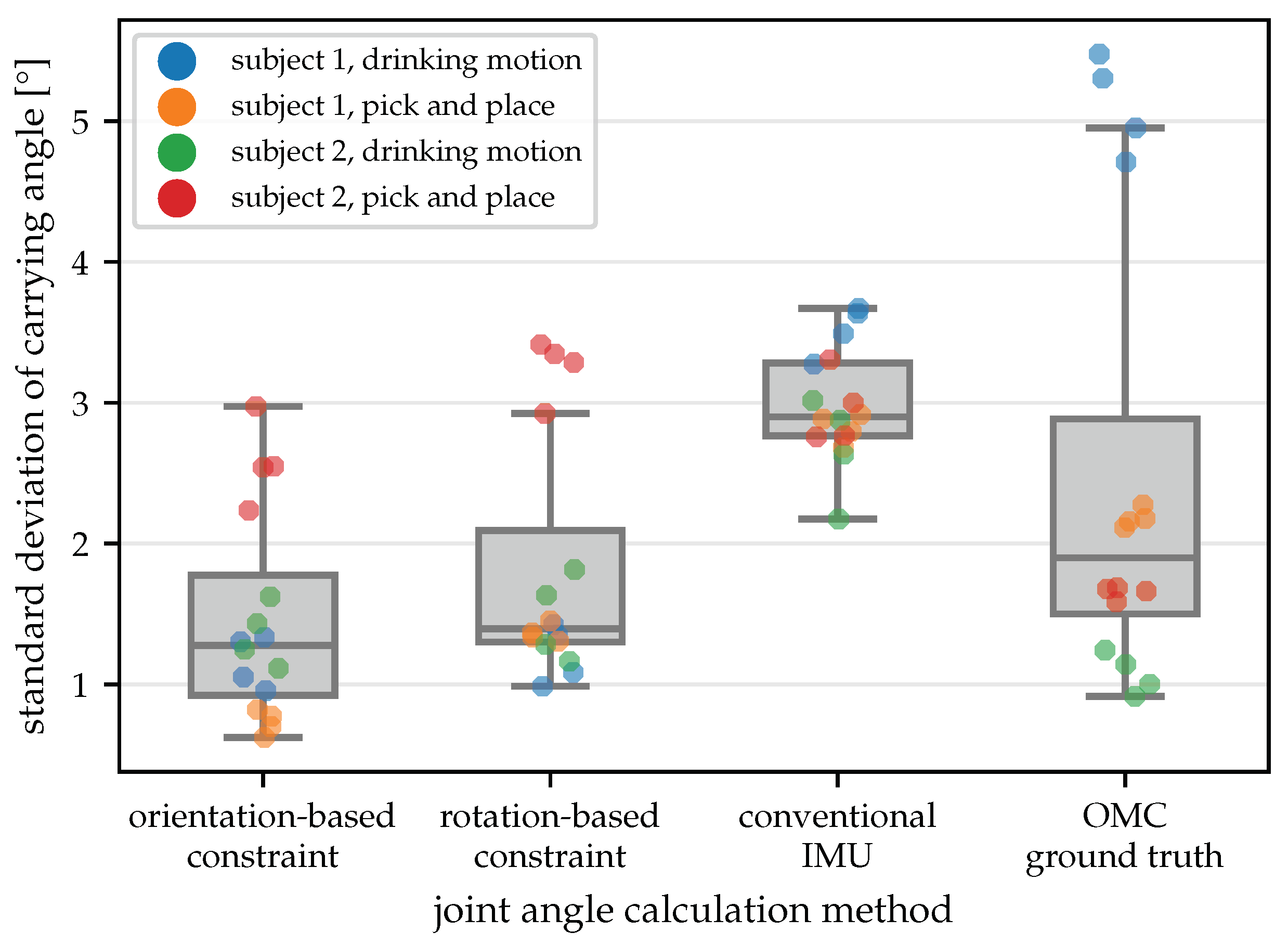
5.2. Accuracy of Magnetometer-Free Joint Angle Tracking
- During the pick-and-place motion, the subject placed a small box in a sequence of predefined orientations and locations on a table.
- The drinking motion consists of the subject repeatedly placing the hand on a table, grabbing a cup, simulating a drinking motion, and then placing the cup back on the table.
- The OMC-based ground truth angles are derived from the optical markers placed on anatomical landmarks and calculated as described in [45].
- Conventional IMU-based joint angles are calculated using 9D sensor fusion (with the VQF algorithm [48]), i.e., using the magnetic field to determine the heading, and relying on the careful placement of the sensors on the body.
- In contrast, the proposed IMU-based joint angles use 6D sensor fusion (with the VQF algorithm [48]), and the joint axes and heading offset are identified from the trial motion using the
- rotation-based joint constraint and the
- orientation-based joint constraint.
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| 6D | sensor fusion with gyroscope and accelerometer data |
| 9D | sensor fusion with gyroscope, accelerometer, and magnetometer data |
| DoF | degrees of freedom |
| FE | flexion and extension |
| IMU | inertial measurement unit |
| ISB | International Society of Biomechanics |
| MCP | metacarpophalangeal joint |
| OMC | optical motion capture |
| PS | pronation and supination |
| RMSE | root mean square error |
Appendix A. Transforming Any General 2D Joint Model to Euler Angles
Appendix B. Details on the Optimization Procedure
Appendix B.1. Gauss–Newton Algorithm
Appendix B.2. Moving Window Approach for Real-Time Applications
- New samples are continuously selected every and stored in a ring buffer containing data sets, i.e., old data sets are automatically discarded.
- As soon as the buffer is half-full, optimization starts.
- One Gauss–Newton step is performed every time a sample is added to the buffer (to continuously update the solution while spreading the computational load over time).
Appendix B.3. Gradient of Rotation-Based Cost Function
Appendix B.3.1. Derivative with Respect to the Joint Axes
Appendix B.3.2. Derivative with Respect to the Heading Offset
Appendix B.4. Gradient of Orientation-Based Cost Function
Appendix B.4.1. Derivative with Respect to the Joint Axes
Appendix B.4.2. Derivative with Respect to the Heading Offset
Appendix C. On-Chip Sensor Fusion, Soft Tissue Motions, and Axis Ambiguity
Appendix C.1. Extension to On-Chip 6D Sensor Fusion
Appendix C.2. Measurement and Soft Tissue Motion Artifact Reduction
Appendix C.3. Ambiguity in the Signs of the Joint Axes
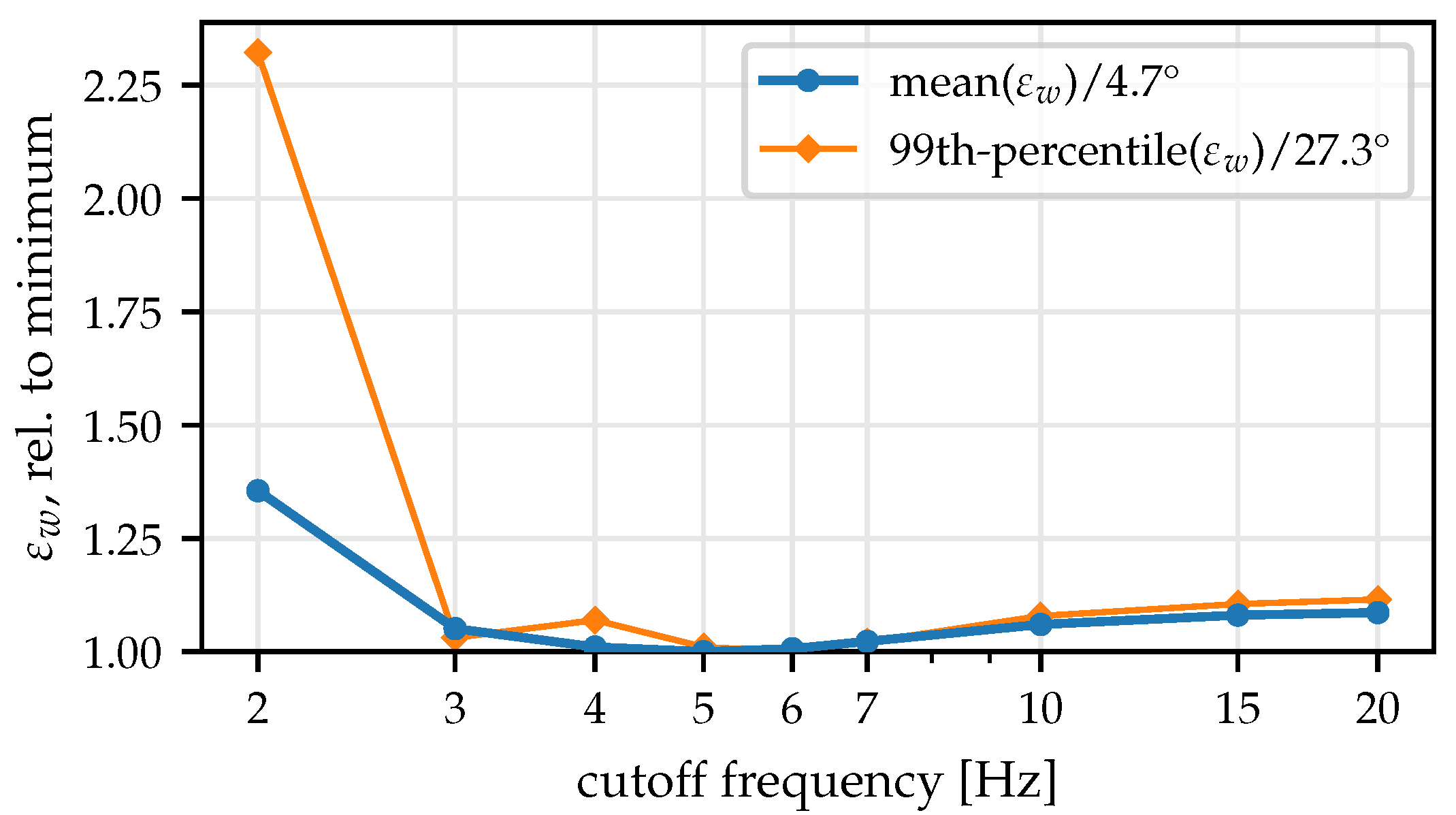
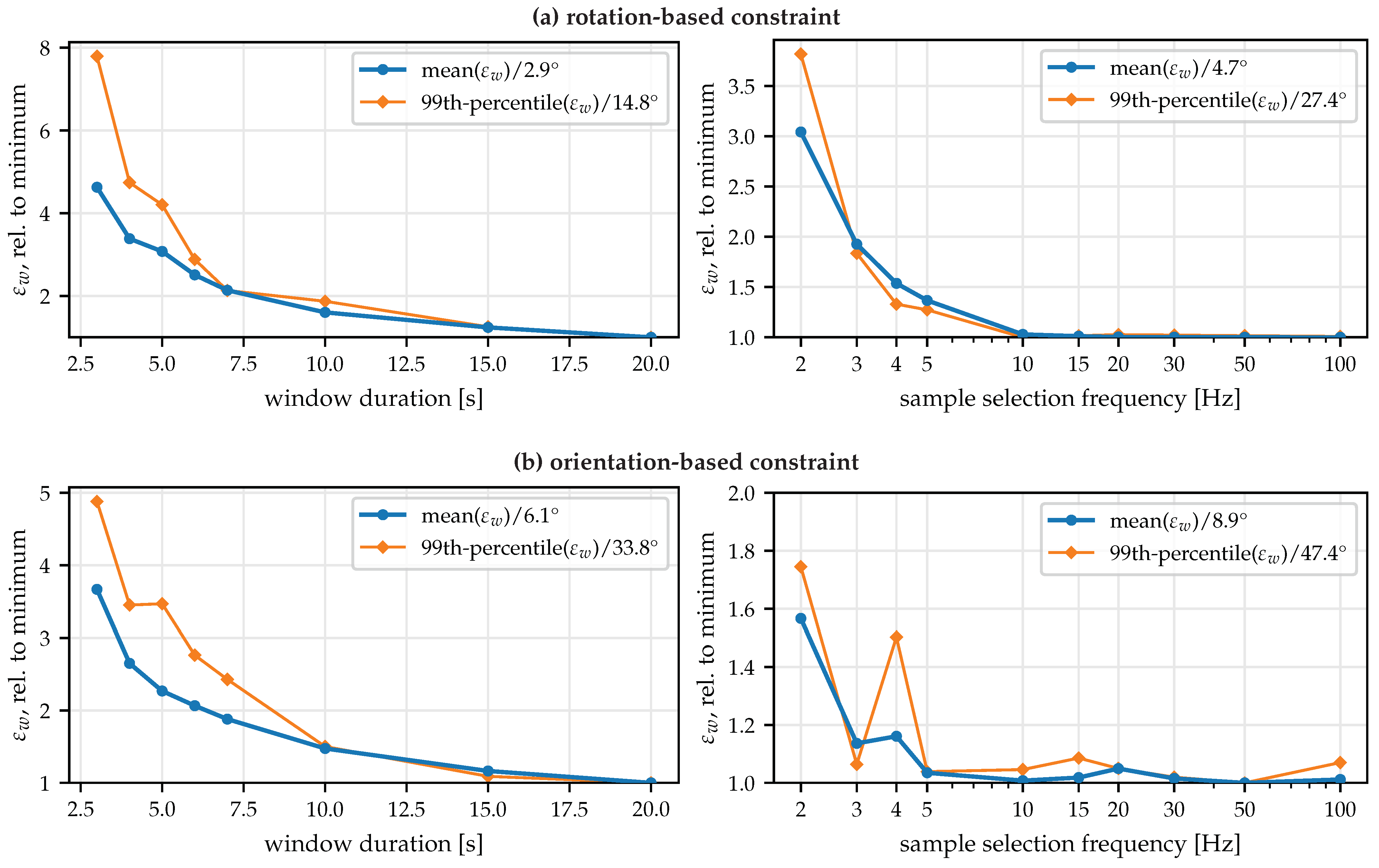
Appendix D. Sensitivity to Cutoff Frequency, Sample Selection Frequency, and Window Duration
- The cutoff frequency for measurement and soft tissue motion artifact reduction (employed value: , cf. Appendix C.2, rotation-based constraint only)
- The sample selection frequency (employed value: , )
- The duration of the measurement window (employed value: ).


References
- Picerno, P. 25 Years of Lower Limb Joint Kinematics by Using Inertial and Magnetic Sensors: A Review of Methodological Approaches. Gait Posture 2017, 51, 239–246. [Google Scholar] [CrossRef] [PubMed]
- Filippeschi, A.; Schmitz, N.; Miezal, M.; Bleser, G.; Ruffaldi, E.; Stricker, D. Survey of Motion Tracking Methods Based on Inertial Sensors: A Focus on Upper Limb Human Motion. Sensors 2017, 17, 1257. [Google Scholar] [CrossRef] [PubMed]
- Vitali, R.V.; Perkins, N.C. Determining Anatomical Frames via Inertial Motion Capture: A Survey of Methods. J. Biomech. 2020, 106, 109832. [Google Scholar] [CrossRef] [PubMed]
- Seel, T.; Raisch, J.; Schauer, T. IMU-based Joint Angle Measurement for Gait Analysis. Sensors 2014, 14, 6891–6909. [Google Scholar] [CrossRef] [PubMed]
- Olsson, F.; Kok, M.; Seel, T.; Halvorsen, K. Robust Plug-and-Play Joint Axis Estimation Using Inertial Sensors. Sensors 2020, 20, 3534. [Google Scholar] [CrossRef] [PubMed]
- Müller, P.; Bégin, M.A.; Schauer, T.; Seel, T. Alignment-Free, Self-Calibrating Elbow Angles Measurement Using Inertial Sensors. IEEE J. Biomed. Health Inform. 2017, 21, 312–319. [Google Scholar] [CrossRef]
- Laidig, D.; Schauer, T.; Seel, T. Exploiting Kinematic Constraints to Compensate Magnetic Disturbances When Calculating Joint Angles of Approximate Hinge Joints from Orientation Estimates of Inertial Sensors. In Proceedings of the 2017 International Conference on Rehabilitation Robotics (ICORR), London, UK, 17–20 July 2017; pp. 971–976. [Google Scholar] [CrossRef]
- Graurock, D.; Schauer, T.; Seel, T. Automatic Pairing of Inertial Sensors to Lower Limb Segments—a Plug-and-Play Approach. Curr. Dir. Biomed. Eng. 2016, 2, 715–718. [Google Scholar] [CrossRef]
- Zimmermann, T.; Taetz, B.; Bleser, G. IMU-to-segment Assignment and Orientation Alignment for the Lower Body Using Deep Learning. Sensors 2018, 18, 302. [Google Scholar] [CrossRef]
- Piazza, S.J.; Okita, N.; Cavanagh, P.R. Accuracy of the Functional Method of Hip Joint Center Location: Effects of Limited Motion and Varied Implementation. J. Biomech. 2001, 34, 967–973. [Google Scholar] [CrossRef]
- Seel, T.; Schauer, T.; Raisch, J. Joint Axis and Position Estimation from Inertial Measurement Data by Exploiting Kinematic Constraints. In Proceedings of the 2012 IEEE International Conference on Control Applications, Dubrovnik, Croatia, 3–5 October 2012; pp. 45–49. [Google Scholar] [CrossRef]
- Crabolu, M.; Pani, D.; Raffo, L.; Cereatti, A. Estimation of the Center of Rotation Using Wearable Magneto-Inertial Sensors. J. Biomech. 2016, 49, 3928–3933. [Google Scholar] [CrossRef]
- Olsson, F.; Halvorsen, K. Experimental Evaluation of Joint Position Estimation Using Inertial Sensors. In Proceedings of the 2017 20th International Conference on Information Fusion (Fusion), Xi’an, China, 10–13 July 2017; pp. 1–8. [Google Scholar] [CrossRef]
- Brennan, A.; Deluzio, K.; Li, Q. Assessment of Anatomical Frame Variation Effect on Joint Angles: A Linear Perturbation Approach. J. Biomech. 2011, 44, 2838–2842. [Google Scholar] [CrossRef] [PubMed]
- Fan, B.; Li, Q.; Tan, T.; Kang, P.; Shull, P.B. Effects of IMU Sensor-to-Segment Misalignment and Orientation Error on 3-D Knee Joint Angle Estimation. IEEE Sensors J. 2022, 22, 2543–2552. [Google Scholar] [CrossRef]
- Miezal, M.; Taetz, B.; Bleser, G. On Inertial Body Tracking in the Presence of Model Calibration Errors. Sensors 2016, 16, 1132. [Google Scholar] [CrossRef] [PubMed]
- Bouvier, B.; Duprey, S.; Claudon, L.; Dumas, R.; Savescu, A. Upper Limb Kinematics Using Inertial and Magnetic Sensors: Comparison of Sensor-to-Segment Calibrations. Sensors 2015, 15, 18813–18833. [Google Scholar] [CrossRef] [PubMed]
- Picerno, P.; Cereatti, A.; Cappozzo, A. Joint Kinematics Estimate Using Wearable Inertial and Magnetic Sensing Modules. Gait Posture 2008, 28, 588–595. [Google Scholar] [CrossRef]
- Picerno, P.; Caliandro, P.; Iacovelli, C.; Simbolotti, C.; Crabolu, M.; Pani, D.; Vannozzi, G.; Reale, G.; Rossini, P.M.; Padua, L.; et al. Upper Limb Joint Kinematics Using Wearable Magnetic and Inertial Measurement Units: An Anatomical Calibration Procedure Based on Bony Landmark Identification. Sci. Rep. 2019, 9, 14449. [Google Scholar] [CrossRef]
- Vargas-Valencia, L.S.; Elias, A.; Rocon, E.; Bastos-Filho, T.; Frizera, A. An IMU-to-body Alignment Method Applied to Human Gait Analysis. Sensors 2016, 16, 2090. [Google Scholar] [CrossRef]
- Robert-Lachaine, X.; Mecheri, H.; Larue, C.; Plamondon, A. Accuracy and Repeatability of Single-Pose Calibration of Inertial Measurement Units for Whole-Body Motion Analysis. Gait Posture 2017, 54, 80–86. [Google Scholar] [CrossRef]
- Butt, H.T.; Taetz, B.; Musahl, M.; Sanchez, M.A.; Murthy, P.; Stricker, D. Magnetometer Robust Deep Human Pose Regression with Uncertainty Prediction Using Sparse Body Worn Magnetic Inertial Measurement Units. IEEE Access 2021, 9, 36657–36673. [Google Scholar] [CrossRef]
- van der Straaten, R.; Wesseling, M.; Jonkers, I.; Vanwanseele, B.; Bruijnes, A.K.B.D.; Malcorps, J.; Bellemans, J.; Truijen, J.; Baets, L.D.; Timmermans, A. Discriminant Validity of 3D Joint Kinematics and Centre of Mass Displacement Measured by Inertial Sensor Technology during the Unipodal Stance Task. PLoS ONE 2020, 15, e0232513. [Google Scholar] [CrossRef]
- Palermo, E.; Rossi, S.; Marini, F.; Patanè, F.; Cappa, P. Experimental Evaluation of Accuracy and Repeatability of a Novel Body-to-Sensor Calibration Procedure for Inertial Sensor-Based Gait Analysis. Measurement 2014, 52, 145–155. [Google Scholar] [CrossRef]
- Favre, J.; Aissaoui, R.; Jolles, B.M.; de Guise, J.A.; Aminian, K. Functional Calibration Procedure for 3D Knee Joint Angle Description Using Inertial Sensors. J. Biomech. 2009, 42, 2330–2335. [Google Scholar] [CrossRef] [PubMed]
- de Vries, W.H.K.; Veeger, H.E.J.; Cutti, A.G.; Baten, C.; van der Helm, F.C.T. Functionally Interpretable Local Coordinate Systems for the Upper Extremity Using Inertial & Magnetic Measurement Systems. J. Biomech. 2010, 43, 1983–1988. [Google Scholar] [CrossRef] [PubMed]
- Luinge, H.J.; Veltink, P.H.; Baten, C.T.M. Ambulatory Measurement of Arm Orientation. J. Biomech. 2007, 40, 78–85. [Google Scholar] [CrossRef]
- Cutti, A.G.; Giovanardi, A.; Rocchi, L.; Davalli, A.; Sacchetti, R. Ambulatory Measurement of Shoulder and Elbow Kinematics through Inertial and Magnetic Sensors. Med Biol. Eng. Comput. 2008, 46, 169–178. [Google Scholar] [CrossRef]
- Ligorio, G.; Bergamini, E.; Truppa, L.; Guaitolini, M.; Raggi, M.; Mannini, A.; Sabatini, A.M.; Vannozzi, G.; Garofalo, P. A Wearable Magnetometer-Free Motion Capture System: Innovative Solutions for Real-World Applications. IEEE Sens. J. 2020, 20, 8844–8857. [Google Scholar] [CrossRef]
- Favre, J.; Jolles, B.M.; Aissaoui, R.; Aminian, K. Ambulatory Measurement of 3D Knee Joint Angle. J. Biomech. 2008, 41, 1029–1035. [Google Scholar] [CrossRef]
- Lebleu, J.; Gosseye, T.; Detrembleur, C.; Mahaudens, P.; Cartiaux, O.; Penta, M. Lower Limb Kinematics Using Inertial Sensors during Locomotion: Accuracy and Reproducibility of Joint Angle Calculations with Different Sensor-to-Segment Calibrations. Sensors 2020, 20, 715. [Google Scholar] [CrossRef]
- Mascia, G.; Brasiliano, P.; Di Feo, P.; Cereatti, A.; Camomilla, V. A Functional Calibration Protocol for Ankle Plantar-Dorsiflexion Estimate Using Magnetic and Inertial Measurement Units: Repeatability and Reliability Assessment. J. Biomech. 2022, 111202. [Google Scholar] [CrossRef]
- Cottam, D.S.; Campbell, A.C.; Davey, P.C.; Kent, P.; Elliott, B.C.; Alderson, J.A. Functional Calibration Does Not Improve the Concurrent Validity of Magneto-Inertial Wearable Sensor-Based Thorax and Lumbar Angle Measurements When Compared with Retro-Reflective Motion Capture. Med Biol. Eng. Comput. 2021, 59, 2253–2262. [Google Scholar] [CrossRef]
- Cordillet, S.; Bideau, N.; Bideau, B.; Nicolas, G. Estimation of 3D Knee Joint Angles during Cycling Using Inertial Sensors: Accuracy of a Novel Sensor-to-Segment Calibration Procedure Based on Pedaling Motion. Sensors 2019, 19, 2474. [Google Scholar] [CrossRef] [PubMed]
- Carcreff, L.; Payen, G.; Grouvel, G.; Massé, F.; Armand, S. Three-Dimensional Lower-Limb Kinematics from Accelerometers and Gyroscopes with Simple and Minimal Functional Calibration Tasks: Validation on Asymptomatic Participants. Sensors 2022, 22, 5657. [Google Scholar] [CrossRef] [PubMed]
- Salehi, S.; Bleser, G.; Reiss, A.; Stricker, D. Body-IMU Autocalibration for Inertial Hip and Knee Joint Tracking. In Proceedings of the 10th EAI International Conference on Body Area Networks; BodyNets ’15; ICST (Institute for Computer Sciences, Social-Informatics and Telecommunications Engineering): Brussels, Belgium, 2015; pp. 51–57. [Google Scholar] [CrossRef]
- McGrath, T.; Fineman, R.; Stirling, L. An Auto-Calibrating Knee Flexion-Extension Axis Estimator Using Principal Component Analysis with Inertial Sensors. Sensors 2018, 18, 1882. [Google Scholar] [CrossRef] [PubMed]
- McGrath, T.; Stirling, L. Body-Worn IMU Human Skeletal Pose Estimation Using a Factor Graph-Based Optimization Framework. Sensors 2020, 20, 6887. [Google Scholar] [CrossRef] [PubMed]
- McGrath, T.; Stirling, L. Body-Worn IMU-based Human Hip and Knee Kinematics Estimation during Treadmill Walking. Sensors 2022, 22, 2544. [Google Scholar] [CrossRef] [PubMed]
- Olsson, F.; Seel, T.; Lehmann, D.; Halvorsen, K. Joint Axis Estimation for Fast and Slow Movements Using Weighted Gyroscope and Acceleration Constraints. In Proceedings of the 2019 22th International Conference on Information Fusion (FUSION), Ottawa, ON, Canada, 2–5 July 2019; pp. 1–8. [Google Scholar] [CrossRef]
- Nowka, D.; Kok, M.; Seel, T. On Motions That Allow for Identification of Hinge Joint Axes from Kinematic Constraints and 6D IMU Data. In Proceedings of the 2019 18th European Control Conference (ECC), Naples, Italy, 25–28 June 2019. [Google Scholar] [CrossRef]
- Taetz, B.; Bleser, G.; Miezal, M. Towards Self-Calibrating Inertial Body Motion Capture. In Proceedings of the 2016 19th International Conference on Information Fusion (FUSION), Heidelberg, Germany, 5–8 July 2016; pp. 1751–1759. [Google Scholar]
- Norden, M.; Müller, P.; Schauer, T. Real-Time Joint Axes Estimation of the Hip and Knee Joint during Gait Using Inertial Sensors. In Proceedings of the 5th International Workshop on Sensor-Based Activity Recognition and Interaction; iWOAR ’18; Association for Computing Machinery: New York, NY, USA, 2018; pp. 1–6. [Google Scholar] [CrossRef]
- de Vries, W.H.K.; Veeger, H.E.J.; Baten, C.T.M.; van der Helm, F.C.T. Magnetic Distortion in Motion Labs, Implications for Validating Inertial Magnetic Sensors. Gait Posture 2009, 29, 535–541. [Google Scholar] [CrossRef]
- Wu, G.; van der Helm, F.C.T.; Veeger, H.E.J.D.; Makhsous, M.; Roy, P.V.; Anglin, C.; Nagels, J.; Karduna, A.R.; McQuade, K.; Wang, X.; et al. ISB Recommendation on Definitions of Joint Coordinate Systems of Various Joints for the Reporting of Human Joint Motion—Part II: Shoulder, Elbow, Wrist and Hand. J. Biomech. 2005, 38, 981–992. [Google Scholar] [CrossRef]
- Kuipers, J.B. Quaternions and Rotation Sequences. In Proceedings of the International Conference on Geometry, Integrability and Quantization; Coral Press Scientific Publishing: Varna, Bulgaria, 1999; pp. 127–143. [Google Scholar] [CrossRef]
- Laidig, D.; Müller, P.; Seel, T. Automatic Anatomical Calibration for IMU-based Elbow Angle Measurement in Disturbed Magnetic Fields. Curr. Dir. Biomed. Eng. 2017, 3, 167–170. [Google Scholar] [CrossRef]
- Laidig, D.; Seel, T. VQF: Highly Accurate IMU Orientation Estimation with Bias Estimation and Magnetic Disturbance Rejection. Inf. Fusion 2023, 91, 187–204. [Google Scholar] [CrossRef]
- Laidig, D.; Lehmann, D.; Bégin, M.A.; Seel, T. Magnetometer-Free Realtime Inertial Motion Tracking by Exploitation of Kinematic Constraints in 2-DoF Joints. In Proceedings of the 2019 41st Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Berlin, Germany, 23–27 July 2019; pp. 1233–1238. [Google Scholar] [CrossRef]
- Wright, S.; Nocedal, J. Numerical Optimization; Springer: Berlin/Heidelberg, Germany, 1999; Volume 35, pp. 67–68. [Google Scholar]
- Weygers, I.; Kok, M.; Seel, T.; Shah, D.; Taylan, O.; Scheys, L.; Hallez, H.; Claeys, K. In-Vitro Validation of Inertial-Sensor-to-Bone Alignment. J. Biomech. 2021, 110781. [Google Scholar] [CrossRef]
- Dam, E.B.; Koch, M.; Lillholm, M. Quaternions, Interpolation and Animation; Datalogisk Institut, Københavns Universitet Copenhagen: Copenhagen, Denmark, 1998; Volume 2. [Google Scholar]











Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Laidig, D.; Weygers, I.; Seel, T. Self-Calibrating Magnetometer-Free Inertial Motion Tracking of 2-DoF Joints. Sensors 2022, 22, 9850. https://doi.org/10.3390/s22249850
Laidig D, Weygers I, Seel T. Self-Calibrating Magnetometer-Free Inertial Motion Tracking of 2-DoF Joints. Sensors. 2022; 22(24):9850. https://doi.org/10.3390/s22249850
Chicago/Turabian StyleLaidig, Daniel, Ive Weygers, and Thomas Seel. 2022. "Self-Calibrating Magnetometer-Free Inertial Motion Tracking of 2-DoF Joints" Sensors 22, no. 24: 9850. https://doi.org/10.3390/s22249850
APA StyleLaidig, D., Weygers, I., & Seel, T. (2022). Self-Calibrating Magnetometer-Free Inertial Motion Tracking of 2-DoF Joints. Sensors, 22(24), 9850. https://doi.org/10.3390/s22249850