
A Network Model for Detecting Marine Floating Weak Targets Based on Multimodal Data Fusion of Radar Echoes


Abstract
1. Introduction
2. Dataset Introduction and Multimodal Data Analysis
2.1. Dataset Introduction
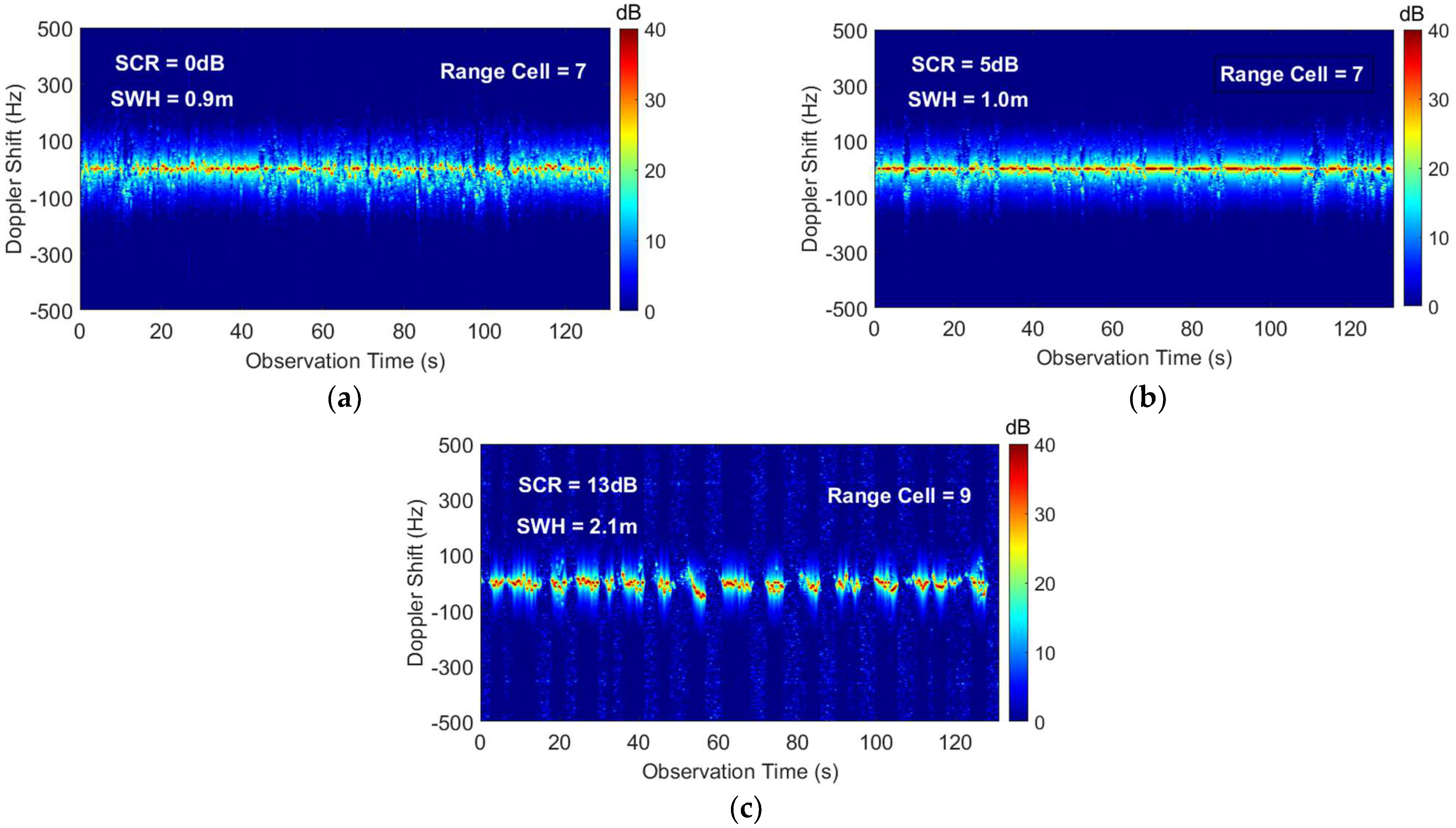
2.2. Multimodal Data Analysis of Radar Echoes
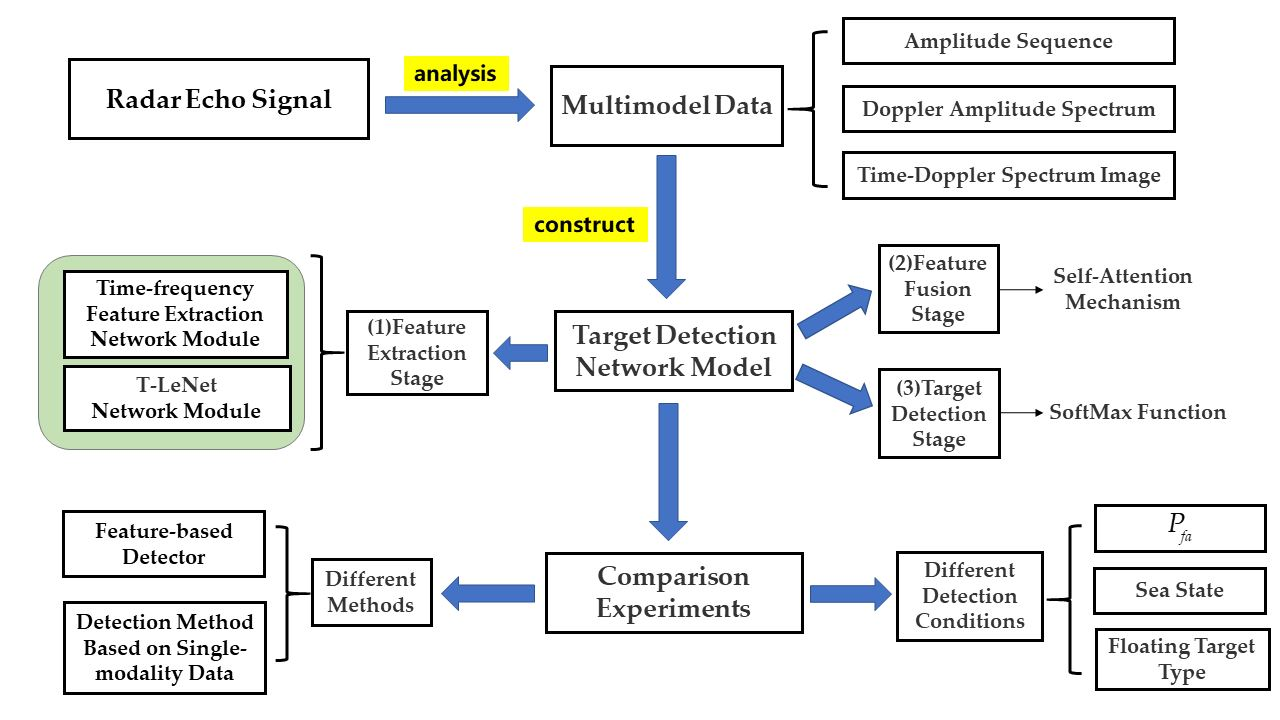
3. Construction and Training of Target Detection Network Model
3.1. Construction of Network Model
3.2. Model Training
4. Experimental Results and Analysis
4.1. Dataset Construction
4.2. Comparative Analysis with Single-Modality Data
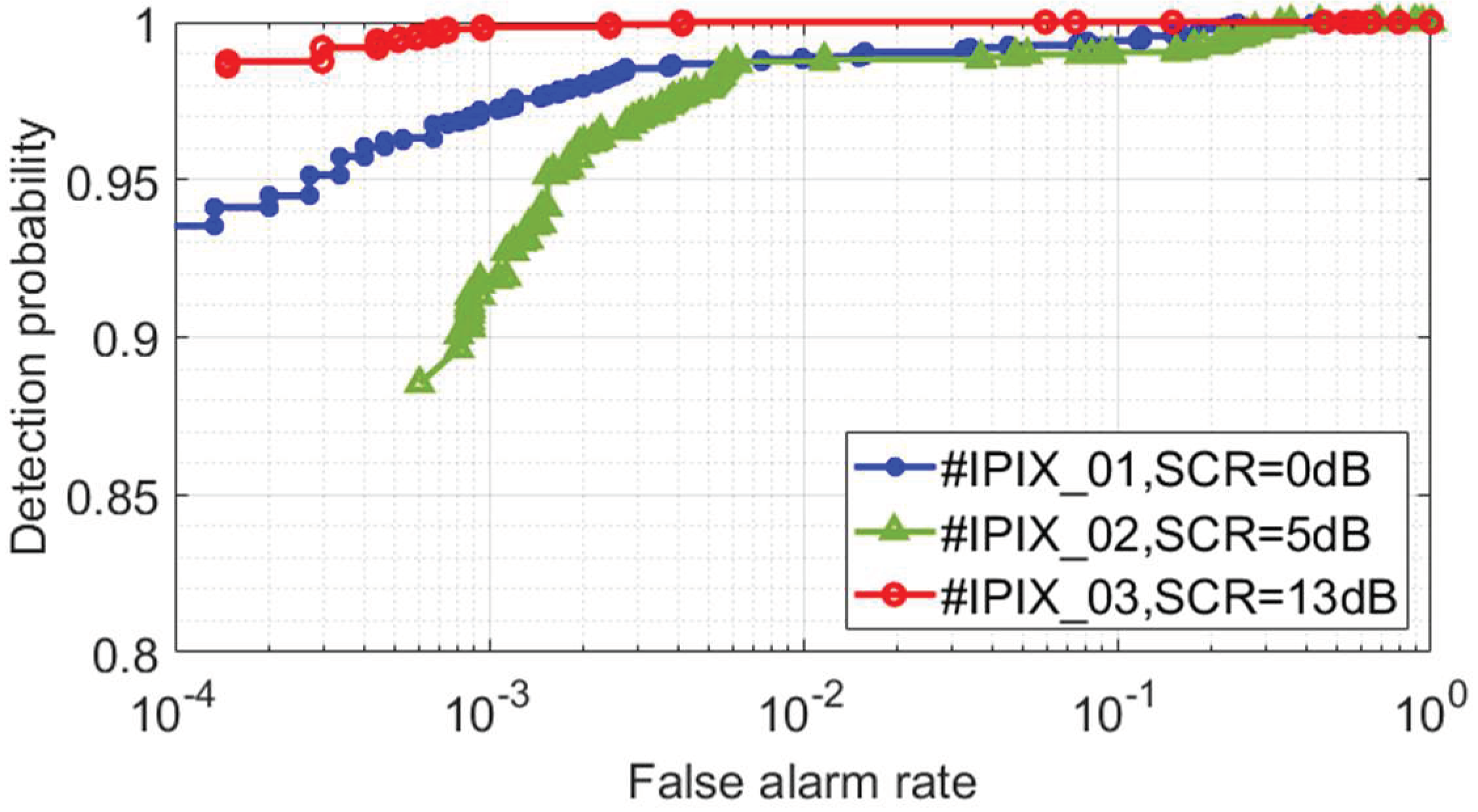
4.3. Performance Analysis under Different Sea States
4.4. Performance Analysis of Different Marine Floating Targets
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ward, K.D.; Tough, R.J.A.; Watts, S. Sea Clutter: Scattering, the K Distribution and Radar Performance, 2nd ed.; IET: London, UK, 2013. [Google Scholar]
- Chen, X.; Guan, J.; Huang, Y.; He, Y. Radar low-observable target detection. Sci. Technol. Rev. 2017, 35, 30–38. [Google Scholar]
- Chen, X.L.; Guan, J.; Huang, Y.; Yu, H.X.; Liu, N.B.; Dong, Y.L.; He, Y. Fine processing and application of radar low observable Moving Target. Sci. Technol. Rev. 2017, 35, 9. [Google Scholar]
- Chen, X.; Guan, J.; Liu, N.; Zhou, W.; He, Y. Detection of a Low Observable Sea-Surface Target with Micromotion via the Radon-Linear Canonical Transform. IEEE Trans. Geosci. Res. Lett. 2014, 11, 1225–1229. [Google Scholar] [CrossRef]
- Raynal, A.M.; Doerry, A.W. Doppler characteristics of sea clutter; Sandia National Laboratories (California): Livermore, CA, USA, 2010. [Google Scholar]
- Toporkov, J.V.; Sletten, M.A. Statistical Properties of Low-Grazing Range-Resolved Sea Surface Backscatter Generated Through Two-Dimensional Direct Numerical Simulations. IEEE Trans. Geosci. Remote Sens. 2007, 45, 1181–1197. [Google Scholar] [CrossRef]
- Liu, Y.; Frasier, S.J.; McIntosh, R.E. Measurement and classification of low-grazing-angle radar sea spikes. IEEE Trans. Antennas Propag. 1998, 46, 27–40. [Google Scholar] [CrossRef]
- Roberts, W. Adaptive Radar Signal Processing. Diss. Theses Gradworks 2010, 52, 18–23. [Google Scholar]
- Yan, Y.; Wu, G.; Dong, Y.; Bai, Y. Floating Small Target Detection in Sea Clutter Using Mean Spectral Radius. IEEE Geosci. Remote Sens. Lett. 2022, 19, 4023405. [Google Scholar] [CrossRef]
- Wu, X.; Ding, H.; Liu, N.-B.; Guan, J. A Method for Detecting Small Targets in Sea Surface Based on Singular Spectrum Analysis. IEEE Trans. Geosci. Remote Sens. 2022, 60, 5110817. [Google Scholar] [CrossRef]
- Gini, F.; Greco, M.V.; Diani, M.; Verrazzani, L. Performance analysis of two adaptive radar detectors against non-Gaussian real sea clutter data. IEEE Trans. Aerosp. Electron. Syst. 2000, 36, 1429–1439. [Google Scholar]
- Conte, E.; De Maio, A. Mitigation Techniques for Non-Gaussian Sea Clutter. IEEE J. Ocean. Eng. 2004, 29, 284–302. [Google Scholar] [CrossRef]
- Gini, F.; Farina, A.; Montanari, M. Vector subspace detection in compound-Gaussian clutter. Part II: Performance analysis. IEEE Trans. Aerosp. Electron. Syst. 2002, 38, 1312–1323. [Google Scholar] [CrossRef]
- Greco, M.; Stinco, P.; Gini, F.; Rangaswamy, M. Impact of Sea Clutter Nonstationarity on Disturbance Covariance Matrix Estimation and CFAR Detector Performance. IEEE Trans. Aerosp. Electron. Syst. 2010, 46, 1502–1513. [Google Scholar] [CrossRef]
- Lo, T.; Leung, H.; Litva, J.; Haykin, S. Fractal characterisation of sea-scattered signals and detection of sea-surface targets. Proc. Inst. Elect. Eng. 1993, 140, 243–250. [Google Scholar] [CrossRef]
- Li, D.; Shui, P. Floating small target detection in sea clutter via normalised Hurst exponent. Electron. Lett. 2014, 50, 1240–1242. [Google Scholar] [CrossRef]
- Hu, J.; Tung, W.W.; Gao, J. Detection of low observable targets within sea clutter by structure function based multifractal analysis. IEEE Trans. Antennas Propag. 2006, 54, 136–143. [Google Scholar] [CrossRef]
- Shui, P.; Li, D.; Xu, S. Tri-feature-based detection of floating small targets in sea clutter. IEEE Trans. Aerosp. Electron. Syst. 2014, 50, 1416–1430. [Google Scholar] [CrossRef]
- Shi, S.; Shui, P. Sea-Surface Floating Small Target Detection by One-Class Classifier in Time-Frequency Feature Space. IEEE Trans. Geosci. Remote Sens. 2018, 56, 6395–6411. [Google Scholar] [CrossRef]
- Guo, Z.-X.; Shui, P.-L. Anomaly Based Sea-Surface Small Target Detection Using K-Nearest Neighbor Classification. IEEE Trans. Aerosp. Electron. Syst. 2020, 56, 4947–4964. [Google Scholar] [CrossRef]
- Guo, Z.-X.; Shui, P.-L.; Bai, X.-H. Small Target Detection in Sea Clutter Using All-Dimensional Hurst Exponents of Complex Time Sequence. Digit. Signal Process. 2020, 101, 102707. [Google Scholar] [CrossRef]
- Xu, S.; Bai, X.; Guo, Z.; Shui, P. Status and prospects of feature-based detection methods for floating targets on the sea surface. J. Radars 2020, 9, 684–714. [Google Scholar]
- Wang, N.; Wang, Y.; Er, M.J. Review on Deep Learning Techniques for Marine Object Recognition: Architectures and Algorithms. Control Eng. Pract. 2020, 118, 104458. [Google Scholar] [CrossRef]
- Mu, X. Radar moving target detection and classification based on time-frequency map deep learning. J. Terahertz Electron. Inf. Technol. 2019, 17, 105–111. [Google Scholar]
- Su, N.; Chen, X.; Guan, J.; Huang, Y.; Liu, N. One-dimensional Sequence Signal Detection Method for Marine Target Based on Deep Learning. J. Signal Process. 2020, 36, 1987–1997. [Google Scholar]
- Su, N.; Chen, X.; Guan, J.; Huang, Y. Maritime Target Detection Based on Radar Graph Data and Graph Convolutional Network. IEEE Trans. Geosci. Res. Lett. 2022, 19, 4019705. [Google Scholar] [CrossRef]
- Pan, M.; Chen, J.; Wang, S.; Dong, Z. A Novel Approach for Marine Small Target Detection Based on Deep Learning. In Proceedings of the 2019 IEEE 4th International Conference on Signal and Image Processing (ICSIP), Wuxi, China, 19–21 July 2019; pp. 395–399. [Google Scholar]
- Chen, X.; Su, N.; Huang, Y.; Guan, J. False-Alarm-Controllable Radar Detection for Marine Target based on Multi features Fusion via CNNs. IEEE Sens. J. 2021, 21, 9099–9111. [Google Scholar] [CrossRef]
- Zhang, C.; Yang, Z.; He, X.; Deng, L. Multimodal Intelligence: Representation Learning, Information Fusion, and Applications. IEEE J. Sel. Top. Signal Process. 2020, 14, 478–493. [Google Scholar] [CrossRef]
- Baltrušaitis, T.; Ahuja, C.; Morency, L.P. Multimodal Machine Learning: A Survey and Taxonomy. IEEE Trans. Pattern Anal. Mach. Intell. 2019, 41, 423–443. [Google Scholar] [CrossRef]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep Residual Learning for Image Recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar]
- Vaswani, A.; Shazeer, N.; Parmar, N.; Uszkoreit, J.; Jones, L.; Gomez, A.N.; Łukasz, K.; Polosukhin, I. Attention Is All You Need. In Proceedings of the NIPS 2017—31st Conference on Neural Information Processing System (NIPS), Long Beach, CA, USA, 4–9 December 2017. [Google Scholar]
- The McMaster IPIX Radar Sea Clutter Database. Available online: http://soma.ece.mcmaster.ca/ipix/ (accessed on 1 July 2021).
- De Wind, H.J.; Cilliers, J.E.; Herselman, P.L. Dataware: Sea clutter and small boat radar reflectivity databases [best of the web]. IEEE Signal Process. Mag. 2010, 27, 145–148. [Google Scholar] [CrossRef]
- Shui, P.; Bao, Z.; Su, H. Nonparametric Detection of FM Signals Using Time-Frequency Ridge Energy. IEEE Trans. Signal Process. 2008, 56, 1749–1760. [Google Scholar] [CrossRef]
- LeCun, Y.; Bottou, L.; Bengio, Y.; Haffner, P. Gradient-based learning applied to document recognition. Proc. IEEE 1998, 86, 2278–2324. [Google Scholar] [CrossRef]
- Chen, K.; Ding, H.; Huo, Q. Parallelizing Adam Optimizer with Blockwise Model-Update Filtering. In Proceedings of the ICASSP 2020—2020 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Barcelona, Spain, 4–8 May 2020; pp. 3027–3031. [Google Scholar]
- Lu, Z.; Sun, L.; Zhou, Y. A Method for Rainfall Detection and Rainfall Intensity Level Retrieval from X-Band Marine Radar Images. Appl. Sci. 2021, 11, 1565. [Google Scholar] [CrossRef]
- Chen, X.; Huang, W.; Zhao, C.; Tian, Y. Rain Detection From X-Band Marine Radar Images: A Support Vector Machine-Based Approach. IEEE Trans. Geosci. Remote Sens. 2020, 58, 2115–2123. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Data ID | File Name | Target Cell | Guard Cell | SWH (m) | WS (km/h) | Angle (Degree) | SCR (dB) | Target Type |
|---|---|---|---|---|---|---|---|---|
| #IPIX_01 | 19931109_191449_starea (HH polarization) | 7 | 6,8 | 0.9 | 19 | 98 | 0 | Floating ball |
| #IPIX_02 | 19931108_220902_starea (HH polarization) | 7 | 6,8 | 1.0 | 9 | 97 | 5 | |
| #IPIX_03 | 19931107_141630_starea (HH polarization) | 9 | 8,10,11 | 2.1 | 9 | 6 | 13 |
| Data ID | File Name | Number of Range Cell | Observation Time(s) | SWH (m) | SCR (dB) | Target Type |
|---|---|---|---|---|---|---|
| #CSIR_01 | TFA17_009 | 96 | 16.5530 | 2.26 | 7.3 | Floating fishing boat |
| #CSIR_02 | TFA17_011 | 48 | 60.3132 | 2.28 | 9.1 | |
| #CSIR_03 | TFC15_041 | 96 | 29.2998 | 3.04 | 3.3 | Floating RIB |
| #CSIR_04 | TFC15_044 | 96 | 28.3362 | 3.04 | 3.6 |
| Data ID | Target Sample (Training Set) | Sea Clutter Sample (Training Set) | Target Sample (Testing Set) | Sea Clutter Sample (Testing Set) |
|---|---|---|---|---|
| #IPIX_01 | 2721 | 2728 | 1360 | 14,960 |
| #IPIX_02 | 2721 | 2728 | 1360 | 14,960 |
| #IPIX_03 | 2721 | 2728 | 1360 | 14,960 |
| #CSIR_01 | 836 | 855 | 418 | 39,710 |
| #CSIR_02 | 3115 | 3149 | 1557 | 73,179 |
| #CSIR_03 | 3000 | 3040 | 1499 | 142,405 |
| #CSIR_04 | 2899 | 2945 | 1449 | 137,655 |
| Target Type | Data ID | False Alarm Rate | Detector | ||
|---|---|---|---|---|---|
| 10−2 | 10−3 | 10−4 | |||
| Floating fishing boat | #CSIR_01 | 0.94 | 0.79 | 0.73 | Proposed detector |
| 0.23 | 0 | 0 | Feature-based detector using three TF features [19] | ||
| 0.71 | 0.09 | 0.01 | Tri-feature-based detector [18] | ||
| #CSIR_02 | 0.64 | 0.41 | 0.41 | Proposed detector | |
| 0.03 | 0 | 0 | Feature-based detector using three TF features [19] | ||
| 0.36 | 0.03 | 0 | Tri-feature-based detector [18] | ||
| Floating RIB | #CSIR_03 | 0.85 | 0.75 | 0.74 | Proposed detector |
| 0.60 | 0.04 | 0 | Feature-based detector using three TF features [19] | ||
| 0.68 | 0.09 | 0.01 | Tri-feature-based detector [18] | ||
| #CSIR_04 | 1.00 | 1.00 | 1.00 | Proposed detector | |
| 0.79 | 0.07 | 0.01 | Feature-based detector using three TF features [19] | ||
| 0.99 | 0.11 | 0.01 | Tri-feature-based detector [18] | ||
| Data ID | Time-Consuming | The Detection Method | ||
|---|---|---|---|---|
| Proposed Model | Tri-Feature-Based Detector [18] | Feature-Based Detector Using Three TF Features [19] | ||
| #CSIR_01 | Time 1 | 493.69 | 0.49 | 611.52 |
| Time 2 | 14.52 | 32.15 | 36.48 | |
| #CSIR_04 | Time 1 | 617.05 | 1.07 | 759.81 |
| Time 2 | 14.34 | 65.22 | 90.51 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Duan, G.; Wang, Y.; Zhang, Y.; Wu, S.; Lv, L. A Network Model for Detecting Marine Floating Weak Targets Based on Multimodal Data Fusion of Radar Echoes. Sensors 2022, 22, 9163. https://doi.org/10.3390/s22239163
Duan G, Wang Y, Zhang Y, Wu S, Lv L. A Network Model for Detecting Marine Floating Weak Targets Based on Multimodal Data Fusion of Radar Echoes. Sensors. 2022; 22(23):9163. https://doi.org/10.3390/s22239163
Chicago/Turabian StyleDuan, Guoxing, Yunhua Wang, Yanmin Zhang, Shuya Wu, and Letian Lv. 2022. "A Network Model for Detecting Marine Floating Weak Targets Based on Multimodal Data Fusion of Radar Echoes" Sensors 22, no. 23: 9163. https://doi.org/10.3390/s22239163
APA StyleDuan, G., Wang, Y., Zhang, Y., Wu, S., & Lv, L. (2022). A Network Model for Detecting Marine Floating Weak Targets Based on Multimodal Data Fusion of Radar Echoes. Sensors, 22(23), 9163. https://doi.org/10.3390/s22239163