1. Introduction
Atomic clocks play an important role in timing systems, including the physical realization of coordinated universal time (UTC) [
1,
2,
3,
4] and the time system of the global navigation satellite system (GNSS) [
5,
6,
7]. Atomic clock frequency jumps sometimes occur in practical applications as a result of the principles on which the clocks are built and variations in ambient temperature and humidity [
8,
9]. To maintain the integrity of the timing system, it is important to quickly identify atomic clock frequency jumps [
10,
11,
12,
13].
Many studies have reported several methods for detecting atomic clock abnormalities [
14,
15,
16,
17,
18]. However, it is difficult to evaluate the performance of atomic clocks in real time because there are no references with better frequency stability. In other words, if multiple atomic clocks with similar performance are synchronized with anomalies, then the anomalies cannot be identified through comparisons among these atomic clocks. Thus, in practice, the clock with the best frequency stability is used as the reference for detecting abnormalities. Of course, this raises the problem that the best-performing clock has abnormalities that cannot be monitored.
In theory, an ensemble of atomic clocks can be used to construct a collective reference timescale [
10,
19,
20,
21]. The frequency stability of this reference should outperform that of any single atomic clock in the ensemble. Although several studies have demonstrated that atomic clocks in the same laboratory could be affected by ambient influences [
22,
23], this approach is widely used to facilitate time keeping. The most stable and dependable timescale reference is UTC [
24], but this can only evaluate the frequency stability of atomic clocks at time intervals of five days. This lag means that UTC falls well short of accurately evaluating the short-term performance of atomic clocks. In summary, the foundation for atomic clock evaluation is the establishment of a reliable, stable, real-time reference.
When combined with the actual demand for atomic timescale generation in time-keeping laboratories, the ideal reference must be available at the desired sample intervals. To overcome the disadvantages of local and physical references, an exploratory research concept that we refer to as “mirror clocks” is proposed herein. The fundamental idea behind these mirror clocks is the ensemble prediction model, which directly evaluates the measured frequency drift with a confidence interval generated based on the historical uncertainty of the real clock. This is used as a baseline for monitoring the abnormalities of the physical clock in real time.
2. Method
The mirror clock is inspired by the concept of “digital twins” [
25] and learns the output characteristics of atomic clocks using parametric or nonparametric modeling to smooth, filter, and predict the atomic clock output signals. In this paper, an ensemble polynomial model is applied to the mirror clock concept to predict the atomic clock’s output. A confidence interval is output alongside the prediction to quantify the acceptable range of the real measured output. This enables the measurement accuracy to be evaluated based on a probability density function.
2.1. Mirror Clock Implementation Workflow
The clock prediction model serves as the foundation for the mirror clock design and attempts to identify the trends in the clock frequency difference data. This allows the possible parameters of randomly sampled data to be estimated. Subsequently, the model enables future frequency difference data to be predicted based on a weighted sum approach. Therefore, mirror clocks are built using the ensemble algorithm based on past data from real atomic clocks. Mirror clocks anticipate the values and confidence intervals for one or more future frequency points and can be used to identify jump points as well as smoothing the clock data. This is helpful for improving the performance of the timescale in time-keeping systems. According to the key notions of mirror clocks, a technical solution is provided through the combination of three primary processing units: data preprocessing, mirror clock generation, and jump detection.
Figure 1 depicts the specific implementation flowchart, and the following sections discuss each module in detail.
2.2. Data Preprocessing
The data preprocessing module collects clock frequency difference data from
clocks applying dual mixer time difference (DMTD) measurement system over a certain sampling time. The jumps in the data are discovered and corrected by postprocessing the clock difference data among the ensemble. The real-time clock ensemble timescale TA is then calculated using the classical clock ensemble approach with inverse variance weights. The Allan variance of the frequency data for each clock difference is calculated, and then the inverse of the variance is used as the ensemble weight, which is taken as the reference. The clock difference is used as the input for the next workflow module. Equations (1) and (2) describe these calculations:
where
denotes the Allan variance at averaging time
; Both
(
i = 1, 2, …,
n) and
(
i = 1, 2, …,
n) denote the respective clock readings with respect to the reference;
represents the historical data of the
th clock of fixed length. While
reflects the historical stability of the
th clock at averaging time
. For the selected clocks in mirror clock generation and jump detection,
takes a fixed value and does not change by time.
represents the clock data immediately follows the historical data and is used for mirror clock generation and jump detection.
denotes the clock ensemble timescale and is used as the reference. The clock difference
is then passed to mirror clock generation.
2.3. Mirror Clock Generation
The mirror clock generation module first calculates the standard deviation
for the clock with respect to the reference as the clock data dispersion. The data for each clock difference are then input to the mirror clock prediction algorithm. The random pursuit strategy (RPS) [
26,
27] is used for drift learning due to its stronger ability to suppress the influence of frequency jump on clock prediction. Theoretically, other clock prediction methods, such as KF, are also candidates to replace RPS in the process of mirror clock generation.
Each clock difference sequence with respect to the ensemble timescale TA in the sample window is divided into
random subsequences, and
regression models are fitted for each of these subsequences by fixing the starting point and setting the number of sampling points to
. An ensemble of these regressions is used to obtain the final prediction. While moving the sampling window, the algorithm continually anticipates one point in the future. Hence, the model runs in real time. Equations (3)–(5) describe the detailed calculations:
where
represents the
th subsequence obtained by randomly grouping the sampled sequences of the
th continuous clock reading;
represents the subsequence of the
th continuous clock data after removing the
th subsequence;
denotes the prediction value obtained by regression using the
th subsequence; and
denotes the sum of squared errors of the prediction using the regression model learned from the subsequence of the
th continuous clock data after removing the
th subsequence.
is the predicted value of the
th clock using the RPS algorithm, which is also the reading of the mirror clock for the
ith clock.
2.4. Jump Detection
A confidence interval is provided for the predicted values of the mirror clock. This interval, , combines the predicted value of the RPS method and the standard deviation of prediction errors obtained by RPS method for the past clock difference data. The physical measured data from the real clock are regarded as potential jump points if they are located outside of the confidence interval. The system is adjusted, and the clocks’ stability and performance are periodically assessed.
Obviously, the abnormality detection method proposed herein is achieved through comparisons between each physical clock and its own mirror clock. At the same time, to ensure that the references for the physical and mirror clocks are sufficiently reliable, they are both derived from the ensemble timescale TA.
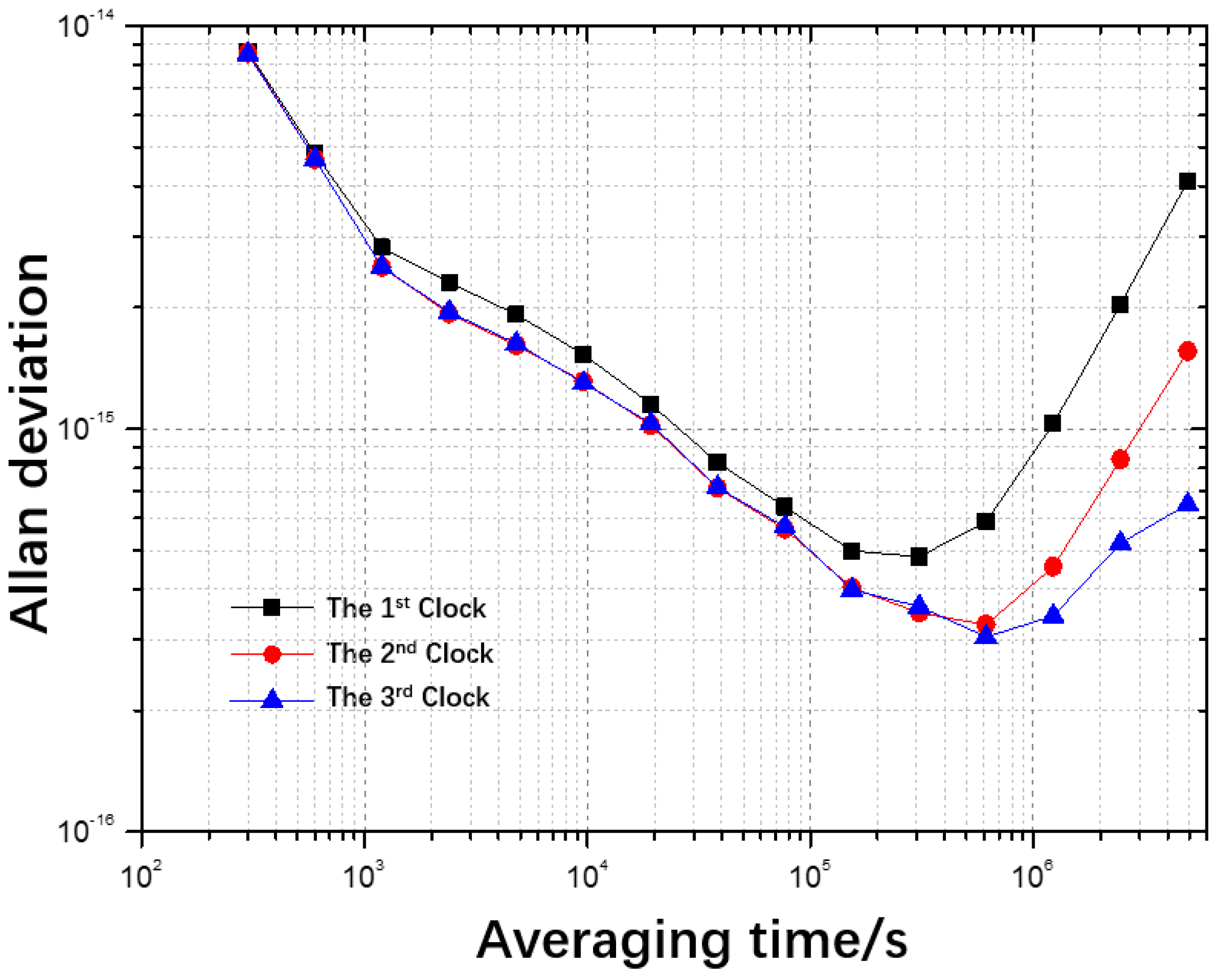
3. Experiment Preparation
In a practical experiment, 40,000 sampling points were collected over a minimum sampling interval of 5 min from three hydrogen masers maintained at the National Institute of Metrology (NIM) in China (Beijing). The clock difference data were obtained with respect to UTC(NIM), i.e., the physical realization of UTC. The frequency stability curves are displayed in
Figure 2.
To test the mirror clocks’ functionality and the proposed algorithm’s accuracy, experiments were designed to detect jumps under various conditions. There are various scenes of real clock jumps. A single clock jump is the simplest and most common scenario. In a clock set, two clocks may jump non-simultaneously. In this case, we can analyze for each clock individually and identify the jumps. While if two or more clocks jump in the same direction and simultaneously, it is often difficult to probe the jumps, and it may even be possible to conclude that other clocks are jumping. Hence, to better simulate and deal with real clock jumps, two scenarios are assessed as follows: ‘a single clock jump’ and ‘two simultaneous clock jumps in the same direction’.
3.1. Single Clock Jump
A single clock jump is quite common. For each clock, 2000 out of the 40,000 sampling points were selected by random sampling. The jumps were injected with a uniform distribution , where , . or is then added to the th selected sample point of the th clock. Here, is the standard deviation of 40,000 sample points from the th clock respective to its reference, representing the dispersion of these sample points. In other words, it is calculated on but not on the historical sample points in the preprocessing phase.
3.2. Two Simultaneous Clock Jumps in the Same Direction
In this scenario, two clocks simultaneously jump in the same direction. The clock difference data for two of the three clocks were handled by randomly selecting 2000 sample points from the total of 40,000 sampling points. The jumps were injected with a uniform distribution . By adding or to the th selected sample point in the same direction to both clocks. The definition of is the same as for the single clock jump.
3.3. Sliding Prediction Model with RPS Strategy
The clock difference sequence was used in the sliding prediction model based on the RPS method, as described in
Section 2.3. The model enables the sample points in a sliding window to be predicted in real time. Considering the noise characteristics of the clock frequency and the computational cost, the RPS hyperparameters were set to
and
. Here,
is the number of sampling points in the sliding window and
represents the number of sub-sequences of RPS. The model was tested with
= 2, 3, and 4 to fine-tune the prediction model.
4. Evaluating Clock Jump Detection Capability
The performance of jump point identification was measured by counting the valid jump detections over 10 experiments. These data were then used to calculate the average and standard deviation of the precision and the average and standard deviation of the recall.
The criterion for determining a valid jump is whether the value after adding the jump is located outside of
, where
represents the mean value of the
th clock in a rolling window and
represents the dispersion of the
th clock calculated with the 40,000 sample points. The precision and recall of valid jump detection illustrate the capability of our model to detect outliers. Equations (6) and (7) were used to compute the precision and recall, respectively:
where TP denotes true positive, which means the proposed method successfully detects valid jumps, FP denotes false positive, which means the proposed method detects normal operation as a valid jump, and FN denotes false negative, which means the proposed method does not detect a valid jump. Under the optimal hyperparameters, the statistical results of valid jump detection for the three clocks are listed in
Table 1.
Figure 3a shows the frequency difference curves of the first hydrogen maser with the jump added and its mirror clock with respect to the same reference. Obviously, the mirror clock (red line) has a smaller frequency range than the first hydrogen maser, and the drift in the mirror clock frequency can be clearly seen.
The jump point can be corrected in the desired sample interval once the model detects an error in the atomic clock. The corrected atomic clock can be created by swapping the jump for the expected value of the mirror clock. The stability curves of the first atomic clock before and after correction are depicted in
Figure 3b. In terms of short-range stability, the corrected atomic clock (red line) performs better than the hydrogen maser. This advantage progressively diminishes over the longer term because the effect of the jump on the stability of the full clock ensemble is mostly evident over short periods of time. The mirror clock effectively addresses the instability that the jump has introduced.
Detection of Two Simultaneous Clock Jumps
With two clocks jumping in the same direction at the same time, jump detection occurs when the model identifies the jump points simultaneously for both clocks. This means that, when the model predicts a jump for the first clock, it must also identify a jump for the second clock.
In the case of the first and second clocks jumping, under the optimal hyperparameters, the average recall of model identification is 96.41%
1.43% and the average precision is 73.49%
2.31%. These performance metrics were calculated for all valid jumps and for each single clock. The performance evaluation of the detection of simultaneous valid jumps in two clocks for different values of
is presented in
Table 2.
In the case of the two clocks jumping, the frequency curves of any hydrogen maser with respect to the jump and its mirror clock are consistent with the single clock jump scenario. The rectified atomic clock performs similarly to the hydrogen maser in terms of long- and short-range stability. This outcome is very similar to the circumstance of a single clock jump. The results demonstrate that, even in the case of many clocks jumping in the same direction, the proposed model retains good detection and correction capabilities.
5. Discussion
Section 3 described how the predicted values could be obtained through the RPS strategy for a hydrogen maser. Here, standard deviation is used to characterize the dispersion of clock prediction errors at short-term time. When considering to long-term prediction, Allan deviation could be more suitable due to the change of dominant clock noise. The robust prediction model of RPS means that the proposed mirror clock method is also suited to other kinds of clocks. The selection of the hyperparameters is an important part of the optimal RPS model.
Table 2 presents results for different values of
, with the optimal values of the other hyperparameters being determined experimentally.
The results in
Table 2 suggest that the precision and the recall of jump detection are well balanced when
rps_bound is set to 3. This is consistent with the
three-sigma principle given by statistical theory. However, this does not prevent
rps_bound from being adjusted to obtain higher precision or higher recall in particular applications. Here,
is an effective regulation parameter that can be used to determine the tolerance of the system to jumps.
The solution to simultaneous jump detection has been examined in detail. Although the probability of simultaneous jumps is not high relative to single jumps, no reasonable solution for the detection of such jumps has previously been reported. As described above, the mirror clock becomes its own reference for each clock, so we can detect the behavior of the mirror clock independently. Therefore, simultaneous valid jump detection becomes a simple combination of detecting single valid jumps.
Analysis of all detection results indicates that the main reason for the failure to detect jumps is the limitation of determining a confidence interval via the historical uncertainty of the real clock. This assumes that the noise characteristics of the detected real-time data are consistent with the noise characteristics of the historical data, which are increasingly biased over time. Additionally, the noise characteristics of the historical data are inherently complex, and analyzing their variance alone, while simplifying the calculation, may result in a loss of accuracy.
6. Conclusions
Mirror clocks provide a novel means of detecting jumps in real time, while reducing the cost of the clock ensemble hardware. Co-directional jumps in multiple clocks can be detected. The predicted data from the mirror clock provide a baseline for the real measured data, and the confidence interval based on the historical uncertainty of the real clock gives an acceptable range for the difference between the real measured data and the predicted data. The experimental results presented in this paper confirm that the proposed method is reliable and effective.
Author Contributions
Conceptualization, Y.C.; Methodology, A.Z.; Formal analysis, Q.X.; Investigation, Y.G.; Writing—original draft, M.L.; Project administration, Y.W. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by the National Key R&D Program of China with grant no. 2021YFB3900701 & 2021YFF0600102 and the National Science Foundation of China with grant no. 61905231.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Data available on request from the authors.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Whibberley, P.B.; Davis, J.A.; Shemar, S.L. Local representations of UTC in national laboratories. Metrologia 2011, 48, S154. [Google Scholar] [CrossRef]
- Davis, J.A.; Shemar, S.L.; Whibberley, P.B. A Kalman filter UTC(k) prediction and steering algorithm. In Proceedings of the 2011 Joint Conference of the IEEE International Frequency Control and the European Frequency and Time Forum (FCS), San Francisco, CA, USA, 2–5 May 2011; pp. 1–6. [Google Scholar]
- Levine, J.; Parker, T. The algorithm used to realize UTC(NIST), Frequency Control Symposium and PDA Exhibition, 2002. In Proceedings of the 2002 IEEE International Frequency Control Symposium and PDA Exhibition (Cat. No.02CH37234), New Orleans, LA, USA, 31 May 2002; pp. 537–542. [Google Scholar]
- Aimin, Z.; Yuan, G.; Kun, L.; Zhiqiang, Y.; Weibo, W.; Dayu, N.; Kejia, Z.; Yue, Z. Research on Time Keeping at NIM. J. Metrol. Soc. India 2012, 27, 55–61. [Google Scholar]
- Han, C.; Yang, Y.; Cai, Z. BeiDou Navigation Satellite System and its Timescales. Metrologia 2011, 48, S213. [Google Scholar] [CrossRef]
- Shin, M.Y.; Park, C.; Lee, S.J. Atomic clock error modeling for GNSS software platform. In Proceedings of the 2008 IEEE/ION Position, Location and Navigation Symposium, Monterey, CA, USA, 5–8 May 2008; pp. 71–76. [Google Scholar]
- Griggs, E.; Kursinski, E.R.; Akos, D. An investigation of GNSS atomic clock behavior at short time intervals. Gps Solut. 2014, 18, 443–452. [Google Scholar] [CrossRef]
- Zucca, C.; Tavella, P.; Peskir, G. Detecting atomic clock frequency trends using an optimal stopping method. Metrologia 2016, 53, S89–S95. [Google Scholar] [CrossRef]
- Wu, Y.W.; Zhu, X.W.; Huang, Y.B.; Sun, G.F.; Ou, G. Optimal Observation Intervals for Clock Prediction Based on the Mathematical Model Method. Ieee Trans. Instrum. Meas. 2016, 65, 132–143. [Google Scholar] [CrossRef]
- Wang, Q.; Droz, F.; Rochat, P. Robust clock ensemble for time and frequency reference system. In Proceedings of the 2015 Joint Conference of the IEEE International Frequency Control Symposium & the European Frequency and Time Forum (FCS), Denver, CO, USA, 12–16 April 2015; pp. 374–378. [Google Scholar]
- Niu, F.; Han, C.; Zhang, Y.; Chang, S. Analysis and Detection on Atomic Clock Anomaly of Navigation Satellites. Geomat. Inf. Sci. Wuhan Univ. 2009, 34, 585–588. [Google Scholar]
- Signorile, G. Analysis of a Kalman filter detector for atomic clock anomalies. In Proceedings of the URSI General Assembly and Scientific Symposium, Beijing, China, 16–23 August 2014. [Google Scholar]
- Galleani; Lorenzo. Detection of changes in clock noise using the time–frequency spectrum. Metrologia 2008, 45, S143. [Google Scholar] [CrossRef]
- Zucca, C.; Tavella, P. A mathematical model for the atomic clock error in case of jumps. Metrologia 2015, 52, 514–521. [Google Scholar] [CrossRef] [Green Version]
- Formichella, V. The Allan variance in the presence of a compound Poisson process modelling clock frequency jumps. Metrol. Int. J. Sci. Metrol. Int. Z. Wiss. Metrol. J. Int. Metrol. Sci. 2016, 53, 1346–1353. [Google Scholar] [CrossRef]
- Galleani, L.; Tavella, P. Robust Detection of Fast and Slow Frequency Jumps of Atomic Clocks. IEEE Trans. Ultrason. Ferroelectr. Freq. Control. 2016, 64, 475–485. [Google Scholar] [CrossRef] [PubMed]
- Janis, J.P.; Jones, M.R.; Quackenbush, N.F. Benefits of operating multiple atomic frequency standards for GNSS satellites. GPS Solut. 2021, 25, 141. [Google Scholar] [CrossRef]
- Trainotti, C.; Giorgi, G.; Furthner, J. Detection and Identification of Faults in Clock Ensembles. In Proceedings of the 32nd International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2019), Miami, FL, USA, 16–20 September 2019. [Google Scholar]
- Greenhall, C.A. A review of reduced kalman filters for clock ensembles. IEEE Trans. Ultrason. Ferroelectr. Freq. Control. 2012, 59, 491–496. [Google Scholar] [CrossRef]
- Parker, T.E. Hydrogen maser ensemble performance and characterization of frequency standards. In Proceedings of the 1999 Joint Meeting of the European Frequency and Time Forum and the IEEE International Frequency Control Symposium, Besancon, France, 13–16 April 1999; Volume 1, pp. 173–176. [Google Scholar]
- Liu, Y.; Xu, B.; Yin, J.; Shen, D.; Ouyang, M.; Zheng, Z.; Zhu, X. Research on a Time Scale Algorithm Based on Multi-Dimensional Weighted Average. Metrologia 2022, 59, 035009. [Google Scholar] [CrossRef]
- Patrizia, T. Statistical and mathematical tools for atomic clocks. Metrologia 2008, 45, S183. [Google Scholar]
- Panfilo, G.; Tavella, P. Atomic clock prediction based on stochastic differential equations. Metrologia 2008, 45, S108. [Google Scholar] [CrossRef]
- Panfilo, G.; Arias, F. The Coordinated Universal Time (UTC). Metrologia 2019, 56, 26. [Google Scholar] [CrossRef]
- Díaz, R.G.; Yu, Q.; Ding, Y.; Laamarti, F.; el Saddik, A. Digital Twin Coaching for Physical Activities: A Survey. Sensors 2020, 20, 5936. [Google Scholar] [CrossRef] [PubMed]
- Yuzhuo, W.; Yu, C.; Yuan, G.; Qinghua, X.; Aimin, Z. Atomic clock prediction algorithm: Random pursuit strategy. Metrologia 2017, 54, 381. [Google Scholar]
- Wang, Y.; Zhang, A.; Gao, Y.; Xu, Q.; Lin, Y. Uncertainty analysis of clock prediction based on a random pursuit strategy. Meas. Sci. Technol. 2018, 29, 075015. [Google Scholar] [CrossRef]
| Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).





{kind=link}
{kind=link}
{kind=link}