
Visual Inspection System for Uncoupling Status of Control-Rod Drive Rod in Nuclear Reactor
 ,
,
Abstract
:1. Introduction
2. System Design
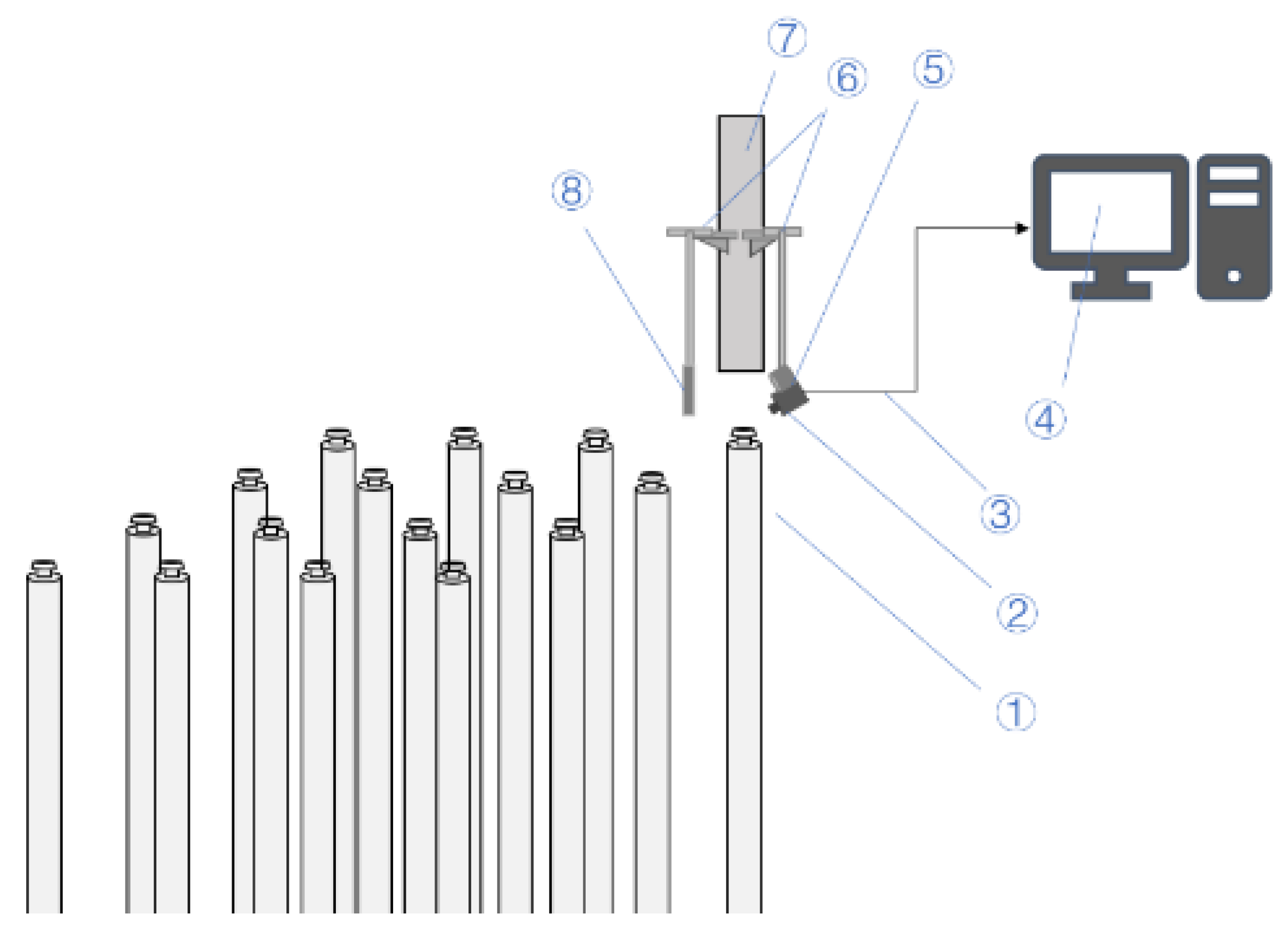
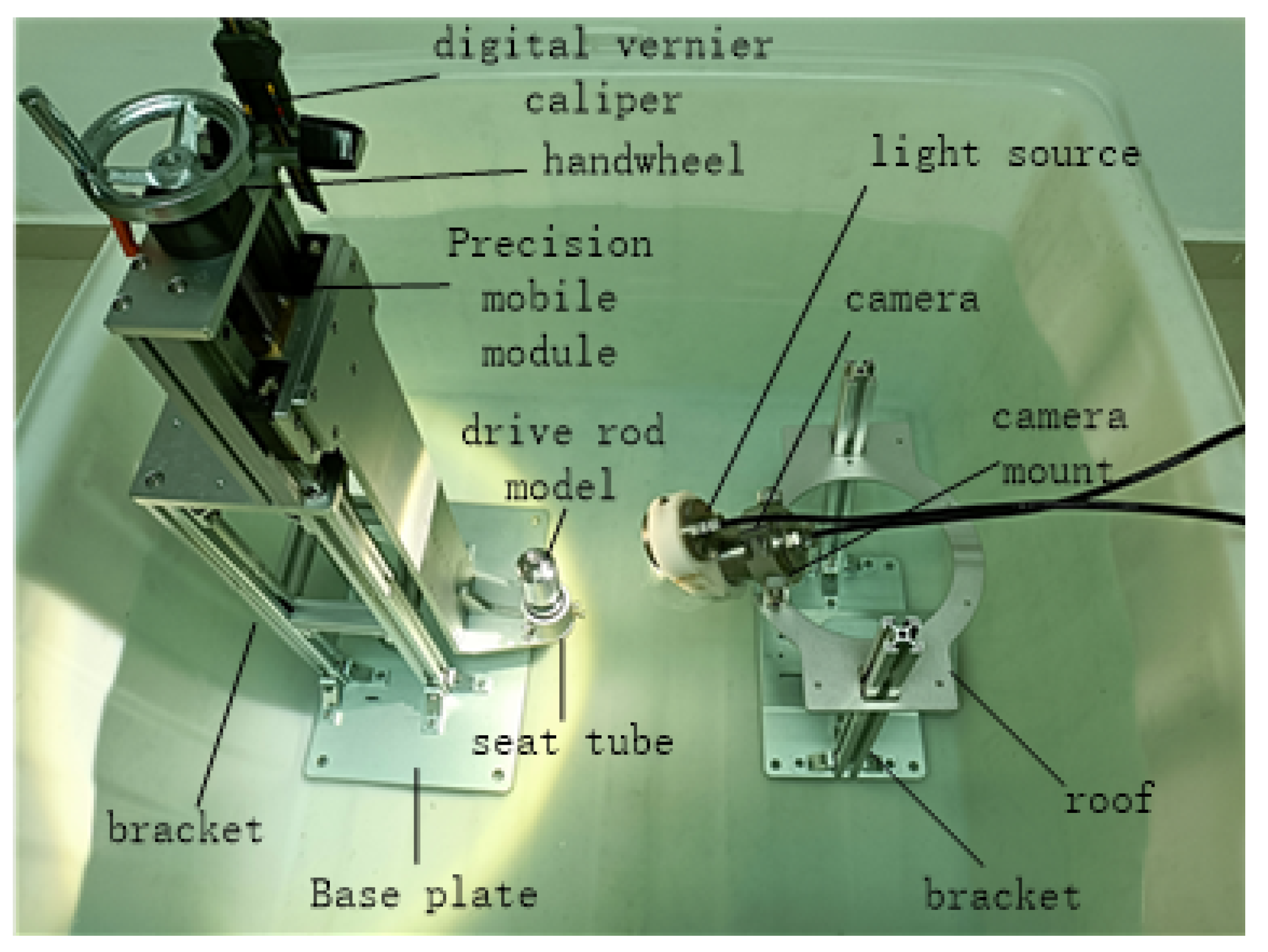
2.1. Experiment Platform
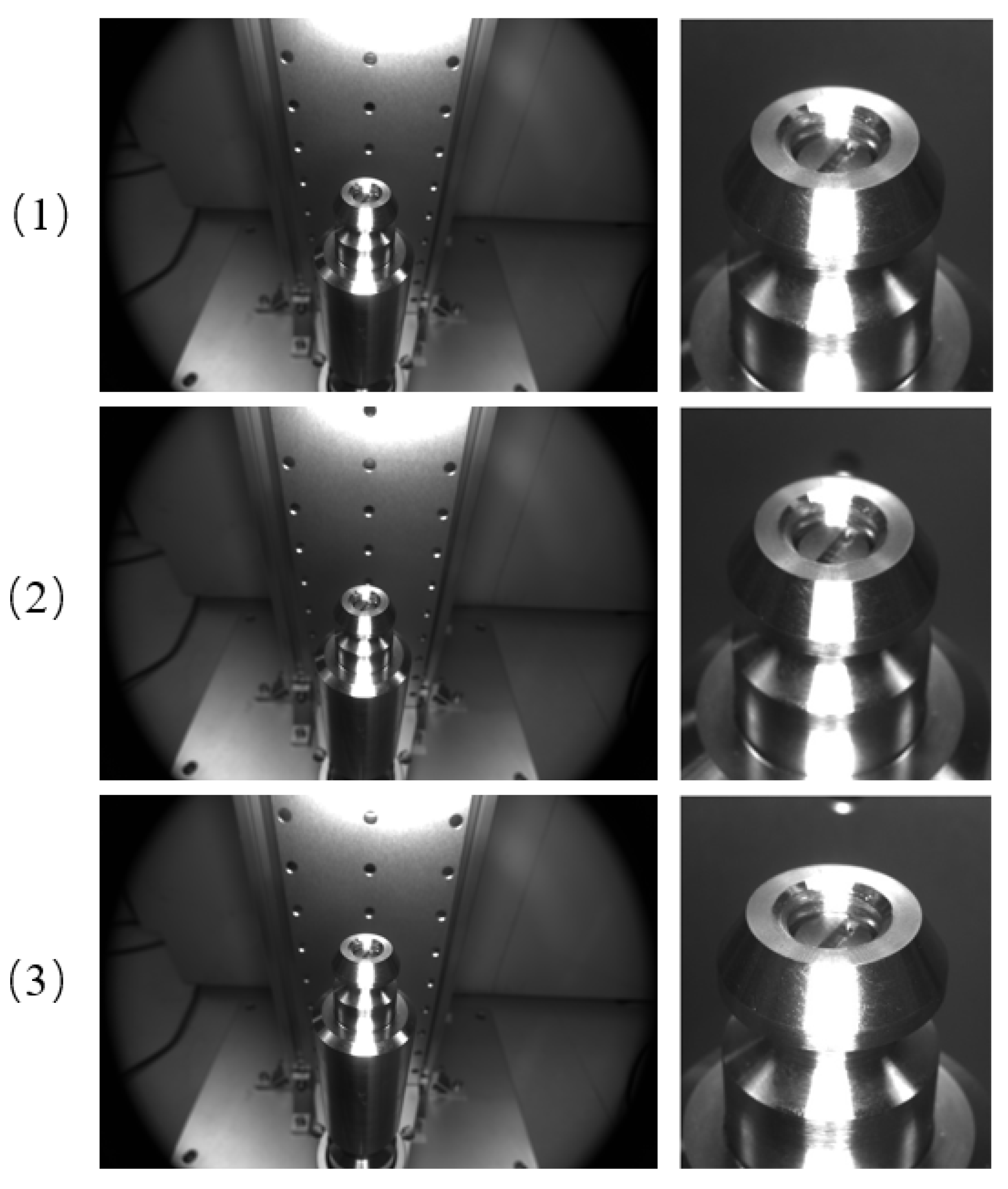
2.2. Experimental Process
3. Detection Method
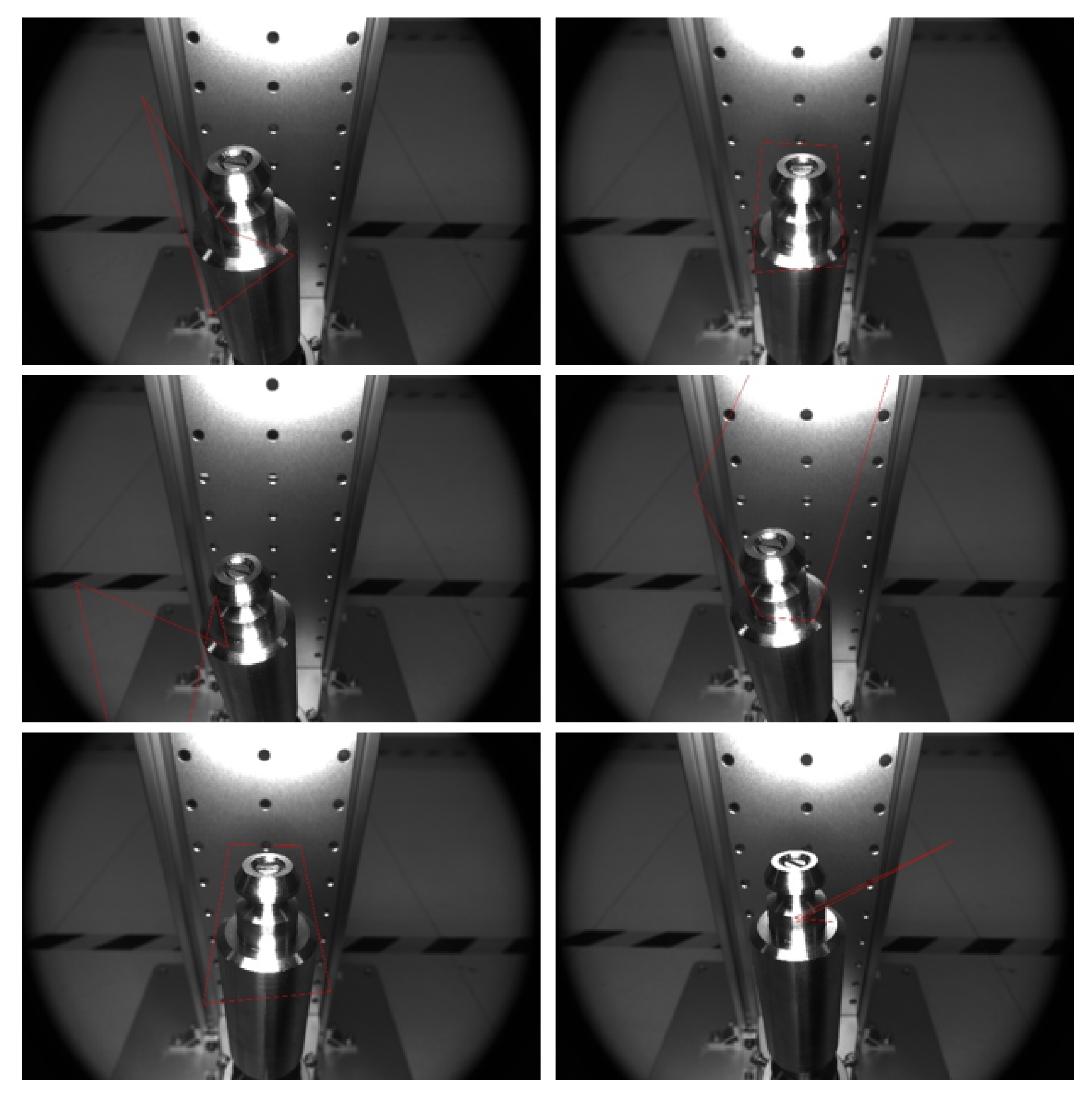
3.1. Ellipse Detection
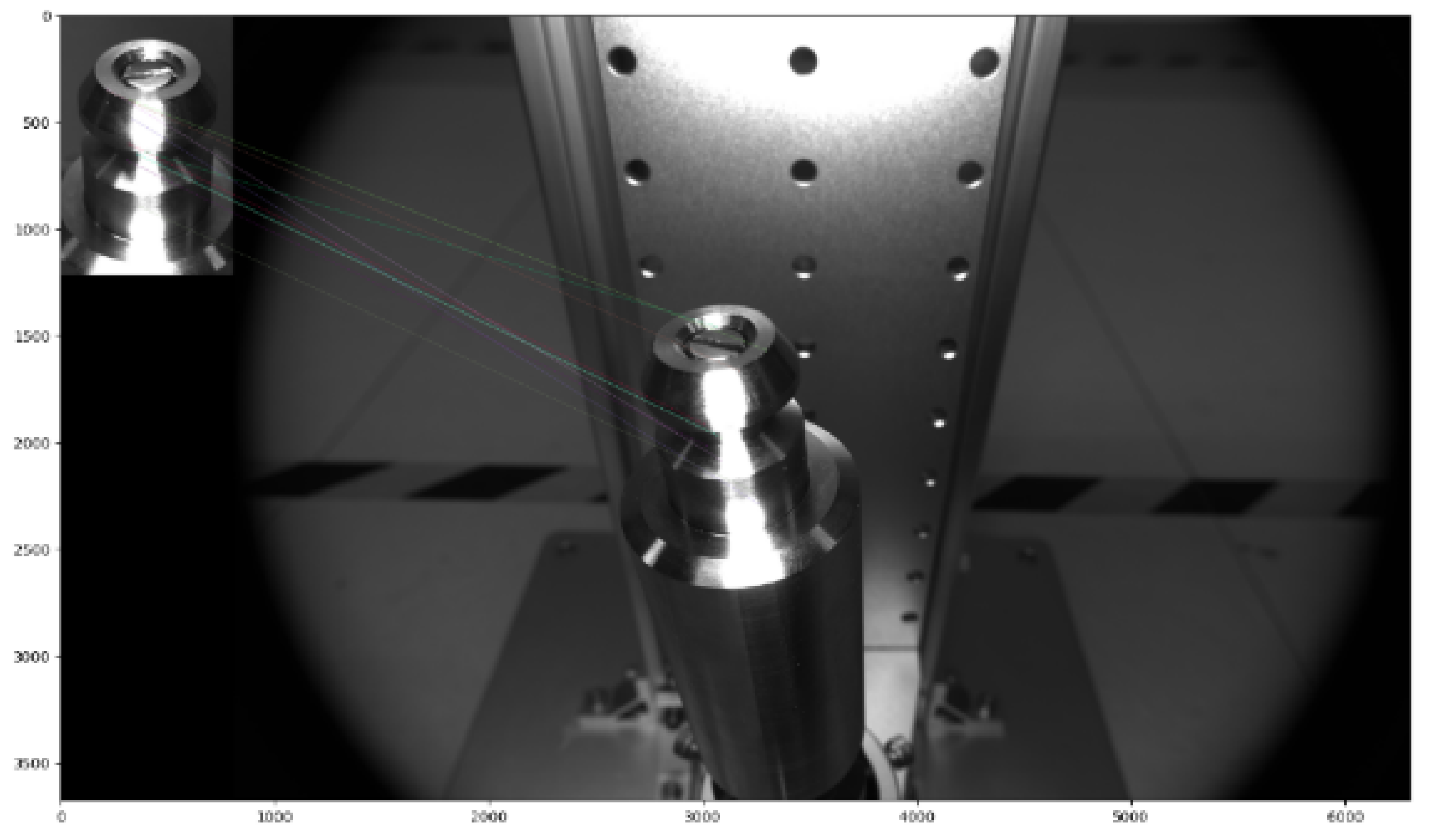
3.2. Driver Rod Rise Height Measurement
4. Experimental and Analysis
4.1. Ellipse Detection Experiment
4.2. Driver Rod Rise Height Measurement
4.3. Modeling-Based Approach
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Jung-Ryul, L.; Hyomi, J.; Churl-Won, K. Wave propagation visualization in an experimental model for a control-rod drive mechanism assembly. Nucl. Eng. Des. 2011, 241, 3761–3767. [Google Scholar]
- Chihu, W.; Weida, Y.; Yongcheng, X.; Gang, L. Electromagnetic field analysis of control-rod drive mechanism. Noise Vib. Control. 2009, 6, 49–52. [Google Scholar]
- Tianyu, Z.; Zhiyong, H.; Feng, C.; Xuedong, H. Analysis of the Working Principle and Structural Characteristics of the Driving Mechanism of the Reactive Control Device. In Progress Report on Nuclear Science and Technology in China; China National Convention Center: Beijing, China, 2009; Volume 1, pp. 1009–1015. [Google Scholar]
- Qiang, D.; Nannan, C.; Jia, L. Dynamic analysis of the lifting action process of the magnetic lifting control-rod drive mechanism. Mech. Des. Manuf. Eng. 2017, 46, 106–110. [Google Scholar]
- Ximing, X.; Zhifeng, Z.; Wei, L.; Qihang, S.; Qiang, D. Research on electromagnetic characteristics of motor sealing shell of control-rod drive mechanism based on finite element method. Nucl. Power Eng. 2014, 35, 121–124. [Google Scholar]
- Zhengke, C.; Zhiguo, D.; Leli, C. Study and realization of PWR CRDM fault diagnosis. Autom. Instrum. 2013, 34, 58–61. [Google Scholar]
- Yuangang, D.; Zhong, X.; Caishun, F. Fault Tree Analysis of Reactor Control Rod Drive Lines; Nuclear Standard Measurement and Quality: Shenzhen, China, 2004; Volume z1, pp. 13–19. [Google Scholar]
- Tianxue, X. Failure Analysis of Reactor Control Rod Drive Line. J. Nav. Acad. Eng. 1993, 2, 38–40. [Google Scholar]
- Zhengke, C. Research and Practice of Fault Diagnosis Technology for Rod Control Rod Position Equipment in Nuclear Power Plants; Nanjing University of Technology: Nanjing, China, 2004. [Google Scholar]
- Fangliang, Y.; Hua, L. Research on the Failure Prevention Countermeasures of the Control-Rod Drive Mechanism of the Nuclear Power Plant Reactor; Nuclear Standard Measurement and Quality: Shenzhen, China, 2004; Volume z1, pp. 158–162. [Google Scholar]
- Xiaochen, Y.; Wei, L.; Liming, Z. Simulation research on state diagnosis of control-rod drive mechanism transmission parts. Nucl. Power Eng. 2017, 38, 141–144. [Google Scholar]
- Cuiyun, P. Research on the noise characteristics of falling rods in the misalignment of the control-rod drive mechanism. Sci. Technol. Vis. 2016, 323–324. [Google Scholar]
- Pinger, H.; Pan, H.; Shaoqun, H. Research on state monitoring and fault diagnosis technology of control-rod drive mechanism. Nucl. Electron. Detect. Technol. 2013, 33, 338–340. [Google Scholar]
- Xiangwei, L.; Junfeng, P.; Luyu, W. Buckling analysis of the derrick of JJ225-43-K oil drilling rig. Chem. Mach. 2010, 37, 347–350. [Google Scholar]
- Fenglian, T.; Shuncheng, F.; Wenlong, L. Eigenvalue Buckling Analysis of Support Frame Based on ANSYS. J. Hebei Univ. Technol. 2010, 39, 6–10. [Google Scholar]
- Xianrong, Q.; Luote, F.; Yinghua, L.; Ying, H.; Qing, Z. Buckling analysis of tower crane truss structure based on finite element method. Chin. J. Constr. Mach. 2013, 11, 187–189. [Google Scholar]
- Zhengrong, J.; Shitong, W.; Kairong, S.; Zhihan, P.; Xiaonan, G.; Peng, K. Nonlinear buckling analysis of large-span elliptical paraboloid chord-supported dome structure of Houjie Gymnasium. Chin. J. Civ. Eng. 2013, 46, 21–28. [Google Scholar]
- Xingkui, M.; Guofu, Y.; Guanhua, D.; Feng, T.; Zhipeng, Z. Buckling Analysis of drive rods of Nuclear Reactor Control Rod Driving Mechanisms. Machinery 2017, 44, 1–4. [Google Scholar]
- Feng, W.; Qiuping, S. Aging Mechanism and Influence Analysis of Control Rod Driving Mechanism. Mech. Eng. 2014, 6, 94–97. [Google Scholar]
- Ya, Z.; Jianzhong, H.; Feiyun, X.; Minping, J. Dynamic Modeling and Analysis of Ball Screw With Pitting Failure. J. Southeast Univ. 2012, S2, 331–335. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Actual Height Difference | Calculated Height Difference | Absolute Value of Error |
|---|---|---|
| 30 | 33.5413 | 3.5413 |
| 35 | 32.2176 | 2.7824 |
| 45 | 46.8270 | 1.8270 |
| Actual Height Difference | Calculate Height Difference | Absolute Value of Height Difference Error |
|---|---|---|
| 5 | 3.57442 | 1.42558 |
| 5 | 5.11984 | 0.11984 |
| 5 | 5.04054 | 0.04054 |
| 5 | 3.72191 | 1.27809 |
| 15 | 14.34968 | 0.65032 |
| 15 | 15.37757 | 0.37757 |
| 15 | 14.72212 | 0.27788 |
| 15 | 14.63187 | 0.36813 |
| 25 | 26.05456 | 1.05456 |
| 25 | 26.43288 | 1.43288 |
| 25 | 24.92022 | 0.07978 |
| 25 | 24.55951 | 0.44049 |
| 33 | 32.87461 | 0.12539 |
| 33 | 31.25468 | 1.74532 |
| 33 | 34.15487 | 1.15487 |
| 33 | 33.59874 | 0.59874 |
| 35 | 35.37073 | 0.37073 |
| 35 | 35.61592 | 0.61592 |
| 35 | 34.35463 | 0.64537 |
| 35 | 35.96944 | 0.96944 |
| 38 | 39.68547 | 1.68547 |
| 38 | 38.26548 | 0.26548 |
| 38 | 38.46579 | 0.46579 |
| 38 | 37.25648 | 0.74352 |
| 42 | 41.25698 | 0.74302 |
| 42 | 40.89651 | 1.10349 |
| 42 | 42.26548 | 0.26548 |
| 42 | 43.12454 | 1.12454 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Z.; Hu, J.; Zhou, Z.; Wang, J.; Zhou, X.; Zhu, Q.; Chen, S.; Wang, Y. Visual Inspection System for Uncoupling Status of Control-Rod Drive Rod in Nuclear Reactor. Sensors 2022, 22, 8805. https://doi.org/10.3390/s22228805
Li Z, Hu J, Zhou Z, Wang J, Zhou X, Zhu Q, Chen S, Wang Y. Visual Inspection System for Uncoupling Status of Control-Rod Drive Rod in Nuclear Reactor. Sensors. 2022; 22(22):8805. https://doi.org/10.3390/s22228805
Chicago/Turabian StyleLi, Zhi, Jianqiang Hu, Zhangxiang Zhou, Jin Wang, Xianen Zhou, Qing Zhu, Shaonan Chen, and Yaonan Wang. 2022. "Visual Inspection System for Uncoupling Status of Control-Rod Drive Rod in Nuclear Reactor" Sensors 22, no. 22: 8805. https://doi.org/10.3390/s22228805
APA StyleLi, Z., Hu, J., Zhou, Z., Wang, J., Zhou, X., Zhu, Q., Chen, S., & Wang, Y. (2022). Visual Inspection System for Uncoupling Status of Control-Rod Drive Rod in Nuclear Reactor. Sensors, 22(22), 8805. https://doi.org/10.3390/s22228805