
Navigation of Ships in Channel Bends under Special Conditions Using Sensors Systems




Abstract
1. Introduction
2. Literature Review
3. Methodology
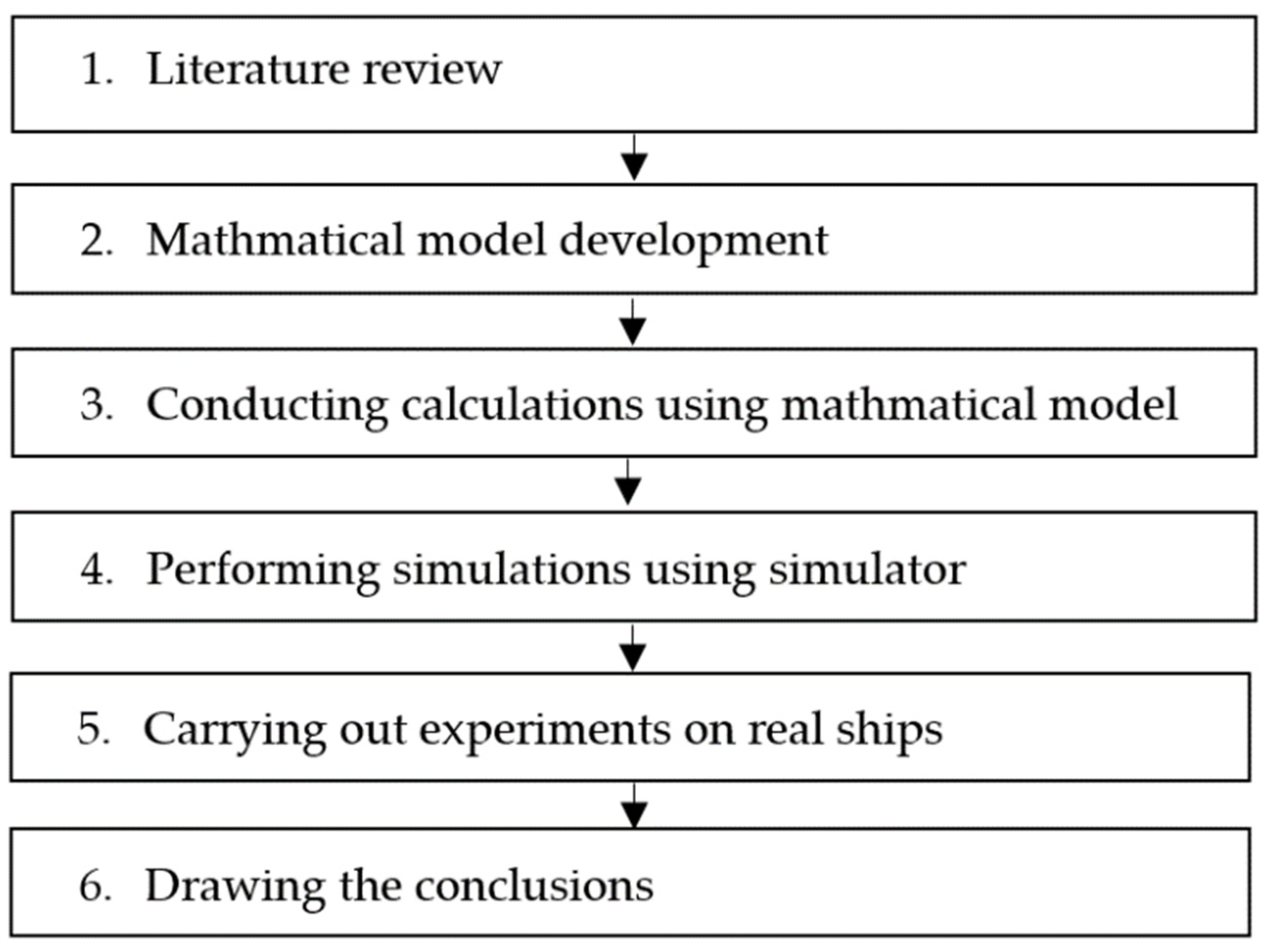
3.1. Steps of Research Methodology
3.2. Mathematical Model
- the forces of ship inertia (when stopping the ship or giving it the required speed);
- the forces of direct action of the hydrodynamic current;
- hydrodynamic “wing” forces (when the vessel is moving upstream, or is standing in the current);
- aerodynamic forces;
- forces resulting from the shallow water effect, etc.
4. Results
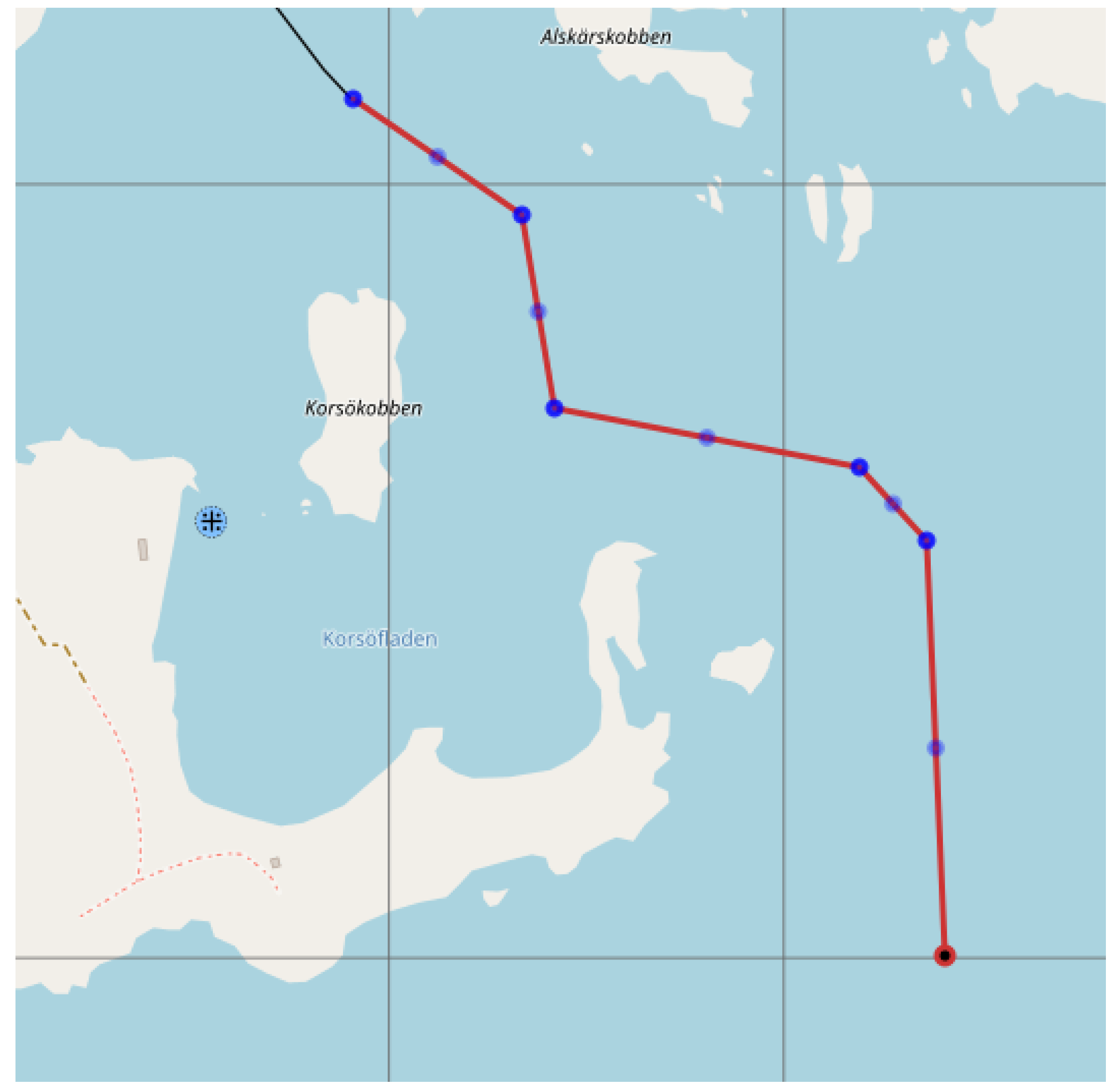
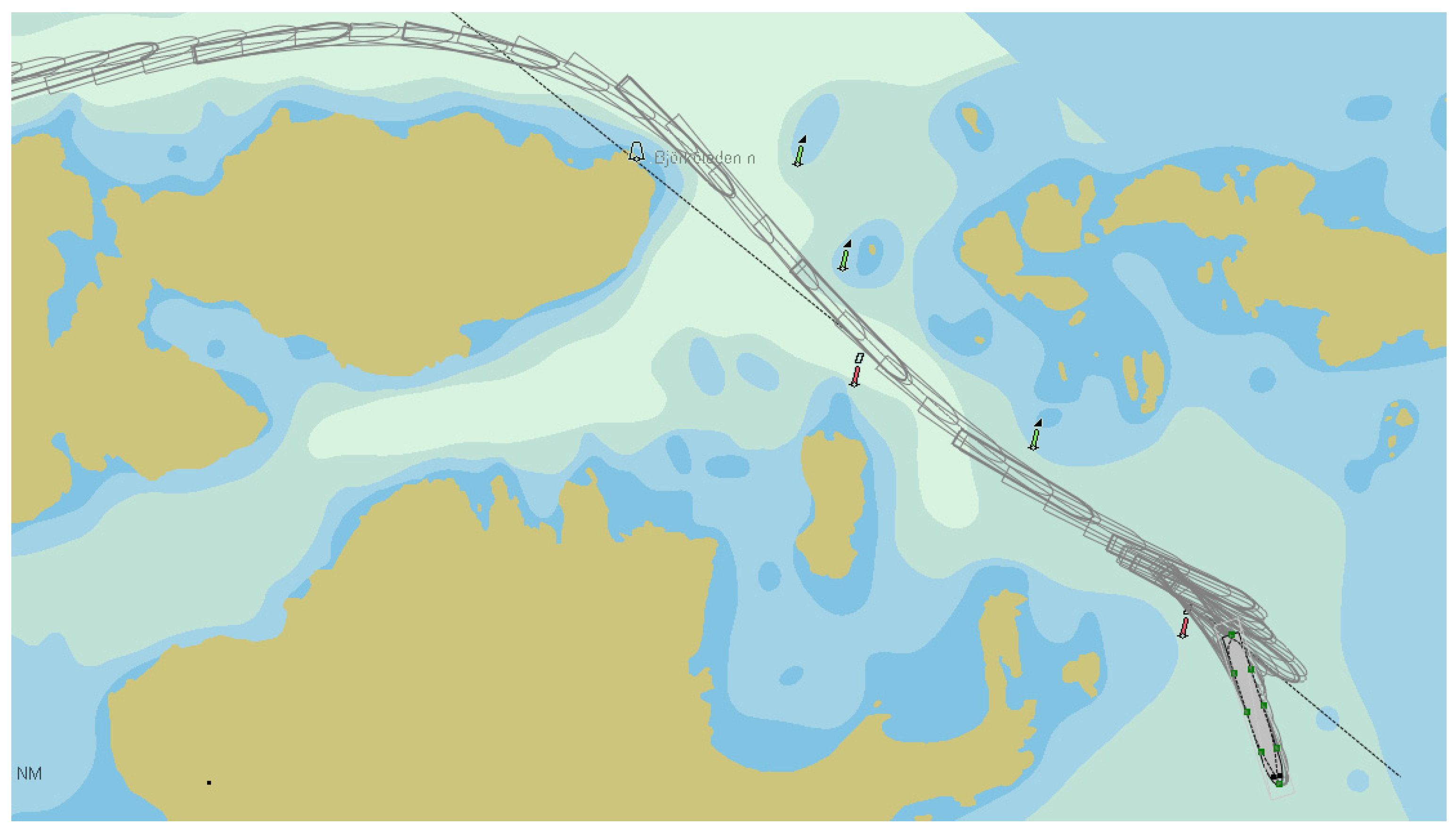
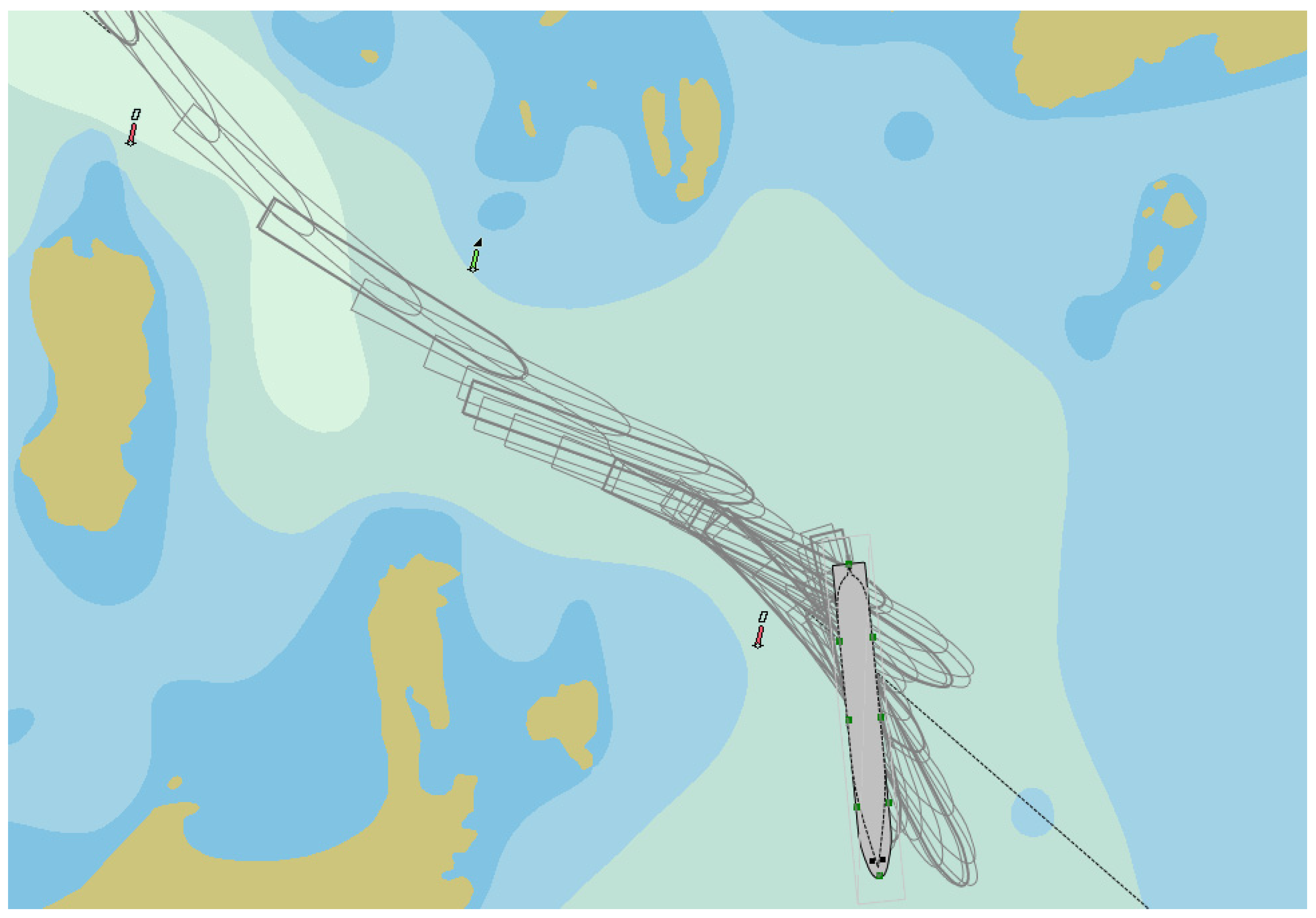
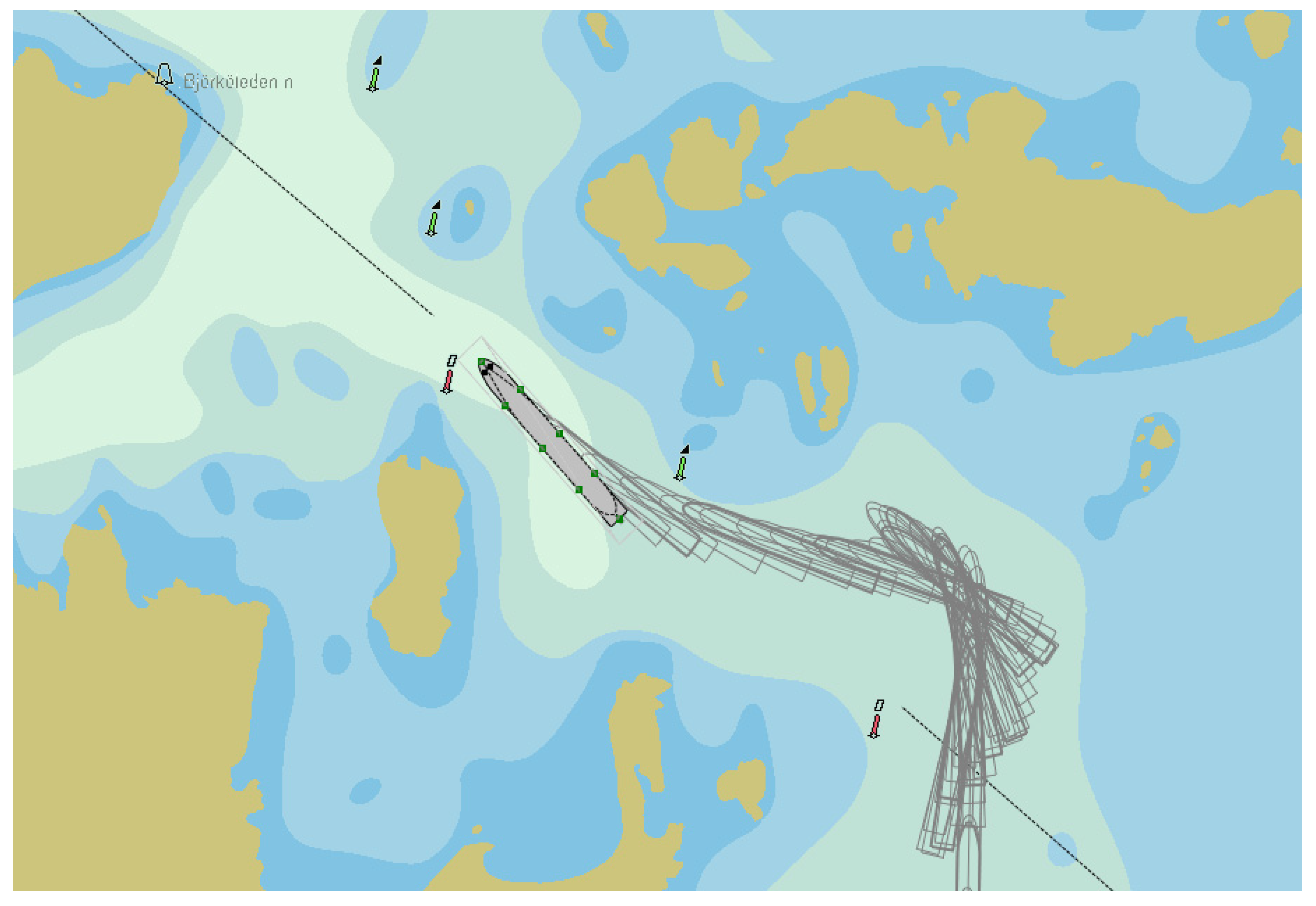
- the navigational channel near Korsakobben Island (Stockholm archipelago) for PANAMAX container vessel (Figure 8);
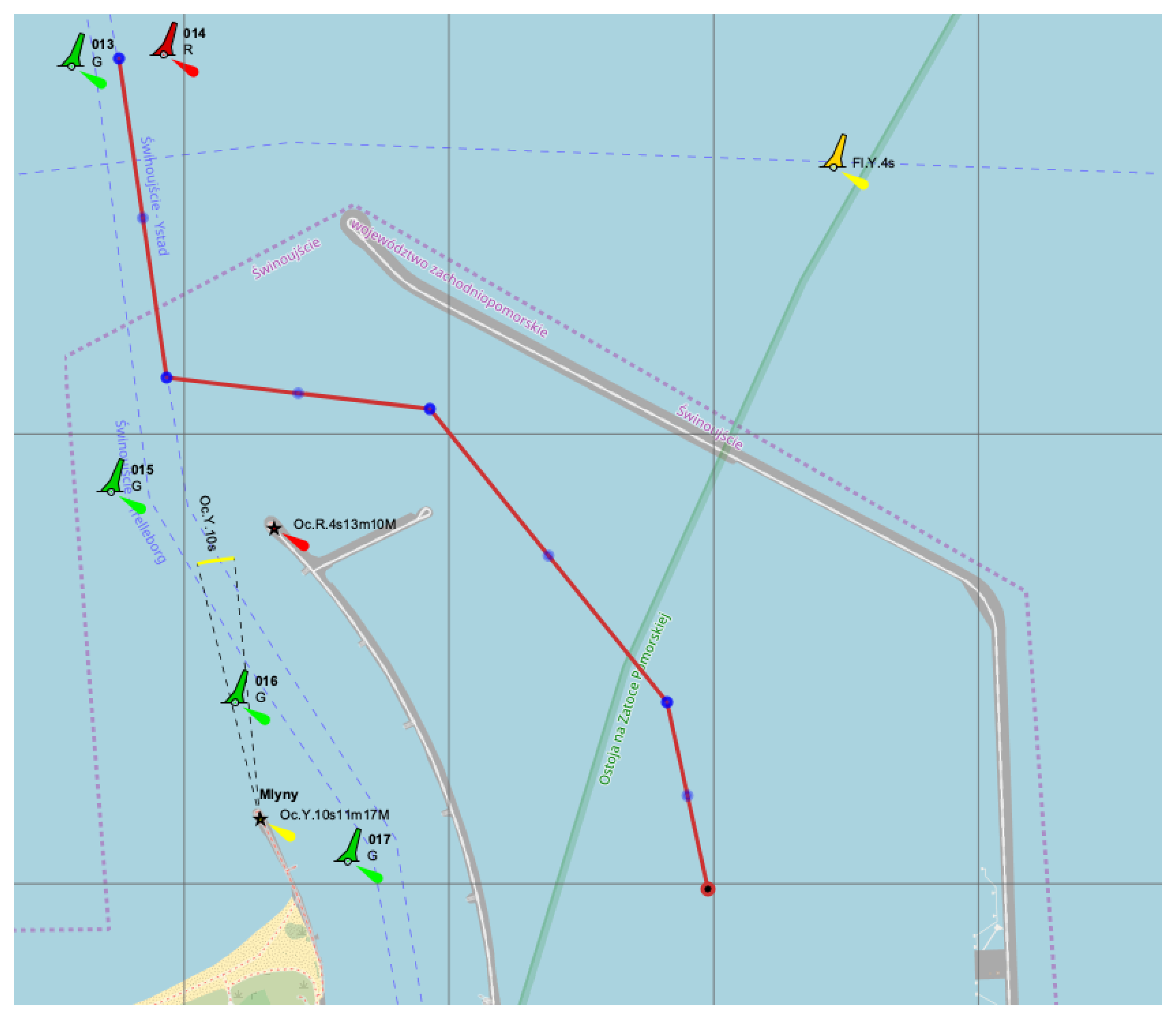
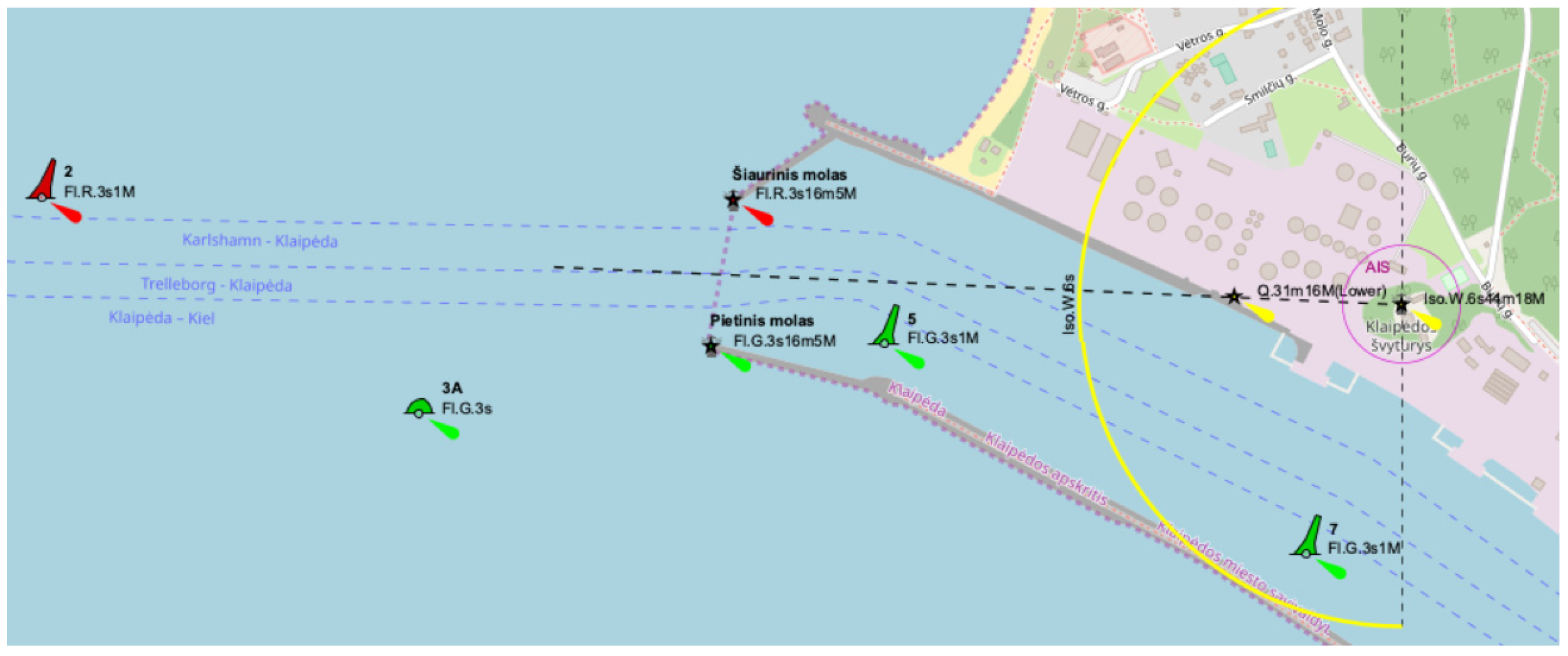
- the approach channel to Klaipeda port for the SUEZMAX tanker.
5. Discussions and Conclusions
- the possibility to assess the external boundary conditions with high accuracy depending on the ship’s controllability capabilities and channel parameters;
- with the use of data received from sensors and appropriate measurement systems, it is possible to calculate in advance the ship’s sailing trajectory with high accuracy, as well as possible maximum deviations from the planned trajectory;
- in case of deviations from the planned trajectory (with minimal discretion), it is possible to adjust the parameters of the ship’s movement without sailing outside the intended traffic lane, using the reversals of the ship’s main engine;
- implementation of measurement results achieved from sensors systems in the calculations of the sailing trajectory allows to minimize the discreteness of the trajectory estimation and, at the same time, the ship’s deviation from the planned trajectory,
- the developed methodology may be applied in advanced automated ship management systems and autonomous ships.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Gucma, S.; Dzwonkowski, J.; Przywarty, M. Kinematic Method of Determining Safe Fairway Bend Widths. TransNav Int. J. Mar. Navig. Saf. Sea Transp. 2020, 14, 435–442. [Google Scholar] [CrossRef]
- Kornacki, J.; Galor, W. Analysis of Ships Turn Maneuvers in Port Water Area. TransNav Int. J. Mar. Navig. Saf. Sea Transp. 2007, 1, 95–100. [Google Scholar]
- Dzwonkowski, J.; Przywarty, M. Analysis of vessel traffic flows on a waterway bend. Sci. J. Marit. Univ. Szczec. 2017, 50, 68–74. [Google Scholar] [CrossRef]
- Szłapczyński, J. Evolutionary sets of safe ship trajectories with speed reduction maneuvers within traffic separation schemes. Pol. Marit. Res. 2014, 1, 20–27. [Google Scholar] [CrossRef]
- Paulauskas, V.; Filina-Dawidowicz, L.; Paulauskas, D. Ships Speed Limitations for Reliable Maintenance of the Quay Walls of Navigation Channels in Ports. Eksploat. I Niezawodn.-Maint. Reliab. 2020, 22, 306–315. [Google Scholar] [CrossRef]
- Xiao, F.; Ma, Y. Artificial forces for virtual autonomous ships with encountering situations in restricted waters. Marit. Policy Manag. 2020, 47, 687–702. [Google Scholar] [CrossRef]
- Puertos Del Estado (2007): ROM 3.1-99, Design of the Maritime Configuration of Ports, Approach Channels and Harbour Basins, Spanish National Ports & Harbours Authority, Madrid. 205p. Available online: https://www.puertos.es/es-es/BibliotecaV2/ROM%203.1-99%20(EN).pdf (accessed on 20 March 2022).
- Lisowski, J. Analysis of Methods of Determining the Safe Ship Trajectory. TransNav Int. J. Mar. Navig. Saf. Sea Transp. 2016, 10, 223–228. [Google Scholar] [CrossRef]
- Thomas, B.S.; Sclavounos, P.D. Optimal-control theory applied to ship maneuvering in restricted waters. J. Eng. Math. 2007, 58, 301–315. [Google Scholar] [CrossRef]
- Bitner-Gregerse, E.M.; Soares, C.G.; Vantorre, M. Adverse weather conditions for ship maneuverability. Transp. Res. Procedia 2016, 14, 1631–1640. [Google Scholar] [CrossRef]
- Fan, S.; Zhang, J.; Blanco-Davis, E.; Yang, Z.; Wang, J.; Yan, X. Effects of seafarers’ emotion on human performance using bridge simulation. Ocean Eng. 2018, 170, 111–119. [Google Scholar] [CrossRef]
- Wu, B.; Yan, X.; Wang, Y.; Soares, C.G. An evidential reasoning-based cream to human reliability analysis in maritime accident process. Risk Anal. 2017, 37, 1936–1957. [Google Scholar] [CrossRef]
- Yıldırım, U.; Başar, E.; Uğurlu, Ö. Assessment of collisions and grounding accidents with human factors analysis and classification system (HFACS) and statistical methods. Saf. Sci. 2019, 119, 412–425. [Google Scholar] [CrossRef]
- Zalewski, P.; Montewka, J. Navigation safety assessment in an entrance channel, based on real experiments. In Proceedings of the International Congress of the International Maritime Association of the Mediterranean, Varna, Bulgaria, 2–6 September 2007; pp. 1113–1117. [Google Scholar]
- Weintrit, A. Initial description of pilotage and tug services in the context of e–navigation. J. Mar. Sci. Eng. 2020, 8, 116. [Google Scholar] [CrossRef]
- Huang, Y.; Chen, L.; Chen, P.; Negenborn, R.R.; van Gelder, P.H.A.J.M. Ship collision avoidance methods: State-of-the-art. Saf. Sci. 2020, 121, 451–473. [Google Scholar] [CrossRef]
- Lee, C.-K.; Lee, S.-G. Investigation of ship maneuvering with hydrodynamic effects between ship and bank. J. Mech. Sci. Technol. 2008, 22, 1230–1236. [Google Scholar] [CrossRef]
- Paulauskas, V.; Lukauskas, V.; Plačiene, B.; Barzdžiukas, R. Ships leaving a port under emergency conditions. Transport 2012, 27, 345–350. [Google Scholar] [CrossRef]
- Alissa, S.; Håkansson, M.; Henkel, P.; Mittmann, U.; Hüffmeier, J.; Rylander, R. Low bandwidth network-rtk correction dissemination for high accuracy maritime navigation. TransNav Int. J. Mar. Navig. Saf. Sea Transp. 2021, 15, 171–179. [Google Scholar] [CrossRef]
- Johnston, M.M.; Godsey, E. Multifaceted Approach of Assessing Channel Design through Ship Simulations in Mobile Harbor, Alabama. J. Waterw. Port Coast. Ocean Eng. 2021, 147, 04021027. [Google Scholar] [CrossRef]
- Openseamap. 2021. Available online: https://www.openseamap.org/index.php?id=openseamap&no_cache=1 (accessed on 12 December 2021).
- Klaipeda Seaport Manuel, maps and charts. 2020. 60p. Available online: https://portofklaipeda.lt/ (accessed on 12 December 2021).
- PIANC. Harbour Approach Channels and Design Guidelines—Report No 121-2014, s.l.: The World Association for Waterborne Transport Infrastructure. 2014. Available online: http://marineman.ir/wp-content/uploads/2015/04/NAVIGATION-PIANC-Harbour-Approach-Channels-Design-Guidelines-2014.pdf (accessed on 25 March 2022).
- Wilhelm Ernst & Sohn. Recommendations of the Committee or Waterfront Structures Harbours and Waterways EAU 2012, 9th ed.; Wiley: Hoboken, NJ, USA, 2015; 676p, ISBN 978-3-433-03110-0. [Google Scholar]
- AIS. Available online: https://www.marinetraffic.com/en/ais/home/centerx:21.146/centery:55.656/zoom:15 (accessed on 10 November 2021).
- Wang, C.H.; Cheng, X.B. Research on navigable ship model test in curved waterway. Appl. Mech. Mater. 2014, 580–583, 1918–1922. [Google Scholar] [CrossRef]
- Gucma, L. The risk assessment of ships maneuvering on the waterways based on generalized simulation data. WIT Trans. Built Environ. 2007, 94, 411–418. [Google Scholar] [CrossRef]
- Szlapczynski, R.; Szlapczynska, J. Review of ship safety domains: Models and applications. Ocean Eng. 2017, 145, 277–289. [Google Scholar] [CrossRef]
- Paulauskas, V. Ships Entering the Ports; N.I.M.S Publish House: Riga, Latvia, 2013; 240p, ISBN 9984-679-71-3. [Google Scholar]
- Lazarowska, A. Verification of Ship’s Trajectory Planning Algorithms Using Real Navigational Data. TransNav Int. J. Mar. Navig. Saf. Sea Transp. 2019, 13, 559–564. [Google Scholar] [CrossRef]
- Paulauskas, V. Navigational risk assessment of ships. Transport 2006, 21, 12–18. [Google Scholar] [CrossRef][Green Version]
- Paulauskas, V.; Paulauskas, D.; Wijffels, J. Ship safety in open ports. Transport 2009, 24, 113–120. [Google Scholar] [CrossRef][Green Version]
- Fişkin, R.; Kişi, H.; Nasibov, E. A Research on Techniques, Models and Methods Proposed for Ship Collision Avoidance Path Planning Problem. Int. J. Marit. Eng. 2018, 160, 187–206. [Google Scholar] [CrossRef]
- Hu, Y.; Zhang, A.; Tian, W.; Zhang, J.; Hou, Z. Multi-Ship Collision Avoidance Decision-Making Based on Collision Risk Index. J. Mar. Sci. Eng. 2020, 8, 640. [Google Scholar] [CrossRef]
- Figuero, A.; Sande, J.; Peña, E.; Alvarello, A.; Rabuñal, J.R.; Maciñeira, E. Operational thresholds of moored ships at the oil terminal of inner port of A Coruña (Spain). Ocean Eng. 2019, 172, 599–613. [Google Scholar] [CrossRef]
- Gil, M.; Montewka, J.; Krata, P.; Hinz, T.; Hirdaris, S. Determination of the dynamic critical maneuvering area in an encounter between two vessels: Operation with negligible environmental disruption. Ocean Eng. 2020, 213, 107709. [Google Scholar] [CrossRef]
- Burmeister, H.C.; Scheidweiler, T.; Reimann, M.; Jahn, C. Assessing Safety Effects of Digitization with the European Maritime Simulator Network EMSN: The Sea Traffic Management Case. TransNav Int. J. Mar. Navig. Saf. Sea Transp. 2020, 14, 91–96. [Google Scholar] [CrossRef]
- Olba, X.B.; Daamen, W.; Vellinga, T.; Hoogendoorn, S.P. State-of-the-art of port simulation models for risk and capacity assessment based on the vessel navigational behavior through the nautical infrastructure. J. Traffic Transp. Eng. 2018, 5, 335–347. [Google Scholar] [CrossRef]
- Theirs, G.F.; Janssens, G.K. A Port Simulation Model as a Performance Decision Instrument. Simulation 1998, 71, 117–125. [Google Scholar] [CrossRef]
- Quy, M.N.; Łazuga, K.; Gucma, L.; Vrijling, J.K.; van Gelder, P.H.A.J.M. Towards generalized ship’s maneuver models based on real time simulation results in port approach areas. Ocean Eng. 2020, 209, 107476. [Google Scholar] [CrossRef]
- Piaggio, B.; Viviani, M.; Martelli, M.; Figari, M. Z-Drive Escort Tug manoeuvrability model and simulation. Ocean Eng. 2019, 191, 106461. [Google Scholar] [CrossRef]
- Aydin, C.; Ünalu, O.; Karabulut, U.C.; Sariöz, K. Practical computational procedures for predicting steering and braking forces of escort tugs. Ocean Eng. 2018, 166, 159–171. [Google Scholar] [CrossRef]
- Toma, A.; Oncica, V.; Atodiresei, D. The study of ships behavior during port maneuvering with tugs. Mircea Cel Batran Nav. Acad. Sci. Bull. 2016, 19, 109–115. [Google Scholar] [CrossRef]
- Sano, M.; Yasukawa, H.; Hata, H. Directional stability of a ship in close proximity to channel wall. J. Mar. Sci. Technol. 2014, 19, 376–393. [Google Scholar] [CrossRef]
- Liu, H.; Ma, N.; Gu, X.C. Ship Course Following and Course Keeping in Restricted Waters Based on Model Predictive Control. TransNav Int. J. Mar. Navig. Saf. Sea Transp. 2018, 12, 305–312. [Google Scholar] [CrossRef]
- Li, L.; Yuan, Z.; Gao, Y. Wash wave effects on ships moored in ports. Appl. Ocean Res. 2018, 77, 89–105. [Google Scholar] [CrossRef]
- Nakamura, S. Study on Maneuvering Criteria for Safety Assessment in Shallow Water. TransNav Int. J. Mar. Navig. Saf. Sea Transp. 2017, 11, 401–407. [Google Scholar] [CrossRef]
- Feng, H.; Grifoll, M.; Yang, Z.; Zheng, P. Collision risk assessment for ships’ routeing waters: An information entropy approach with Automatic Identification System (AIS) data. Ocean Coast. Manag. 2022, 224, 106184. [Google Scholar] [CrossRef]
- Lee, W.; Cho, S.-W. AIS Trajectories Simplification Algorithm Considering Topographic Information. Sensors 2022, 22, 7036. [Google Scholar] [CrossRef] [PubMed]
- Lee, H.-T.; Yang, H.; Cho, I.-S. Data-Driven Analysis for Safe Ship Operation in Ports Using Quantile Regression Based on Generalized Additive Models and Deep Neural Network. Sensors 2021, 21, 8254. [Google Scholar] [CrossRef]
- Kurowski, M.; Kockritz, O.; Korte, H. Full-state Maneuver Planning System for Marine Vehicles. IFAC Proc. Vol. 2013, 46, 144–149. [Google Scholar] [CrossRef]
- Gucma, L.; Montewka, J. Land borne laser rangefinder measurements for navigation safety assessment. Eur. J. Navig. 2005, 3, 1–6. [Google Scholar]
- Perera, L.P.; Guedes Soares, C. Collision risk detection and quantification in ship navigation with integrated bridge systems. Ocean Eng. 2015, 109, 344–354. [Google Scholar] [CrossRef]
- Tomczak, A. Safety evaluation of ship’s maneuvers carried out on the basis of integrated navigational system (INS) indications. J. KONBIN 2008, 1, 247–266. [Google Scholar] [CrossRef][Green Version]
- Ożoga, B.; Montewka, J. Towards a decision support system for maritime navigation on heavily trafficked basins. Ocean Eng. 2018, 159, 88–97. [Google Scholar] [CrossRef]
- Huang, L.; Liu, Y.; Wen, Y.-Q.; Geng, X.-Q.; Sun, T.-D. Inland waterway sparse AIS trajectory estimation method based on navigation experience. Dalian Haishi Daxue Xuebao/J. Dalian Marit. Univ. 2017, 43, 7–13. [Google Scholar] [CrossRef]
- Yoo, S.-L.; Kim, K.-I. Optimal Staffing for Vessel Traffic Service Operators: A Case Study of Yeosu VTS. Sensors 2021, 21, 8004. [Google Scholar] [CrossRef]
- IMO. 2022. Available online: https://www.imo.org/en/OurWork/Safety/Pages/VesselTrafficServices.aspx (accessed on 15 August 2022).
- Baldauf, M.; Claresta, G.; Nugroho, T.F. Vessel traffic services (VTS) to ensure safety of maritime transportation: Studies of potentials in Sunda Strait. IOP Conf. Ser. Earth Environ. Sci. 2020, 557, 012068. [Google Scholar] [CrossRef]
- Taimuri, G.; Matusiak, J.; Mikkola, T.; Kujala, P.; Hirdaris, S. A 6-DoF maneuvering model for the rapid estimation of hydrodynamic actions in deep and shallow waters. Ocean Eng. 2020, 218, 108103. [Google Scholar] [CrossRef]
- Yan, T.; Qian, D.; Shu, Y.; Yang, Y.; Xu, R. Vessel navigation risk and stern-swing index in sharp bend channels. Ocean Eng. 2021, 238, 109640. [Google Scholar] [CrossRef]
- Baldauf, M.; Benedict, K.; Fischer, S.; Motz, F.; Schröder-Hinrichs, J.-U. Collision avoidance systems in air and maritime traffic. Proc. Inst. Mech. Eng. Part O J. Risk Reliab. 2011, 225, 333–343. [Google Scholar] [CrossRef]
- Singh, A. Hazards Identification and Safety Management Practices for Major Hazards in Routine Ship Towage Operation in Indian Coastal Waters. Shodhganga: A Reservoir of Indian Theses @ INFLIBNET. 2017. 85p. Available online: http://hdl.handle.net/10603/183139 (accessed on 12 December 2021).
- Li, J.; Zhang, X.; Yang, B.; Wang, N. Vessel traffic scheduling optimization for restricted channel in ports. Comput. Ind. Eng. 2021, 152, 107014. [Google Scholar] [CrossRef]
- Liu, S.; Wang, C.; Zhang, A. A method of path planning on safe depth for unmanned surface vehicles based on hydrodynamic analysis. Appl. Sci. 2019, 9, 3228. [Google Scholar] [CrossRef]
- Molland, A.F.; Turnock, S.R.; Hudson, D.A. Ship Resistance and Propulsion. Practical Estimation of Propulsive Power; Cambridge University Press: Cambridge, UK, 2011; 537p. [Google Scholar] [CrossRef]
- Paulauskas, V.; Simutis, M.; Plačiene, B.; Barzdžiukas, R.; Jonkus, M.; Paulauskas, D. The Influence of Port Tugs on Improving the Navigational Safety of the Port. Mar. Sci. Eng. 2021, 9, 342. [Google Scholar] [CrossRef]
- Čerka, J. Laivo Eigumas; Klaipeda University Publish House: Klaipeda, Lithuania, 2005; 200p. (In Lithuanian) [Google Scholar]
- Rawson, K.J.; Tupper, E.C. Basic Ship Theory, 5th ed.; Elsever: Amsterdam, The Netherlands, 2001; 727p. [Google Scholar]
- Lopac, N.; Jurdana, I.; Brnelić, A.; Krljan, T. Application of Laser Systems for Detection and Ranging in the Modern Road Transportation and Maritime Sector. Sensors 2022, 22, 5946. [Google Scholar] [CrossRef]
- Chen, C.; Li, Y. Ship Berthing Information Extraction System Using Three-Dimensional Light Detection and Ranging Data. J. Mar. Sci. Eng. 2021, 9, 747. [Google Scholar] [CrossRef]
- Jurdziński, M. Processes of a Freely Drifting Vessel. TransNav Int. J. Mar. Navig. Saf. Sea Transp. 2020, 14, 687–693. [Google Scholar] [CrossRef]
- “SimFlex Navigator” Simulator in Klaipeda University, Force Technology, Denmark, (License No 159 from 2016.09.20); Manuel “SimFlex Navigator”, Forse technology, Copenhagen; Klaipeda University: Klaipeda, Lithuania, 2014; 68p.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Parameters Explanation |
|---|---|
| Ship’s sailing trajectory coordinates. | |
| Ship’s drift velocity on X and Y directions. | |
| Ship’s movement distance on X and Y directions as a result of the acting current, wind, and shallow water effect. | |
| Ships’ maneuvering time on X and Y directions. | |
| Limitation of wind velocity depending on ships’ sailing on X and Y directions. |
| Parameter | PANAMAX Container Vessel | SUEZMAX Tanker |
|---|---|---|
| Length, m | 295 | 274 |
| Length between perpendiculars, m | 284.7 | 261 |
| Width, m | 32.2 | 49 |
| Average draft, m | 10.5 | 13 |
| Full speed, knots | 25.3 | 15 |
| Displacement, t | 61,590 | 127,000 |
| 0° | 30° | 60° | 90° | 120° | 150° | 180° | |
|---|---|---|---|---|---|---|---|
| 5 | 0.07/0 | 0.06/0.05 | 0.05/0.07 | 0/0.07 | −0.51/0.07 | −0.07/0.05 | −0.07/0 |
| 10 | 0.15/0 | 0.14/0.10 | 0.10/0.14 | 0/0.15 | −0.10/0.14 | −0.14/0.10 | −0.15/0 |
| 15 | 0.22/0 | 0.20/0.15 | 0.15/0.20 | 0/0.22 | −0.15/0.20 | −0.20/0.15 | −0.22/0 |
| 20 | 0.29/0 | 0.27/0.21 | 0.21/0.27 | 0/0.29 | −0.21/0.27 | −0.27/0.21 | −0.29/0 |
| Wind Velocity, m/s | 5 | 10 | 15 | 20 |
|---|---|---|---|---|
| , m | 186 | 202 | 218 | 234 |
| , m | 133 | 176 | 215 | 262 |
| Wind Velocity, m/s | 5 | 10 | 15 | 20 |
|---|---|---|---|---|
| , s/min | 881/14, 7 | 814/13, 6 | 756/12, 6 | 714/11, 9 |
| , s/min | 837/14, 0 | 643/10, 7 | 522/8, 7 | 439/7, 3 |
| 200 | 220 | 240 | 260 | |
|---|---|---|---|---|
| , m/s | 17.4 | 15.7 | 14.0 | 12.8 |
| , m/s | 10.3 | 8.7 | 7.9 | 7.2 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Paulauskas, V.; Filina-Dawidowicz, L.; Paulauskas, D. Navigation of Ships in Channel Bends under Special Conditions Using Sensors Systems. Sensors 2022, 22, 8783. https://doi.org/10.3390/s22228783
Paulauskas V, Filina-Dawidowicz L, Paulauskas D. Navigation of Ships in Channel Bends under Special Conditions Using Sensors Systems. Sensors. 2022; 22(22):8783. https://doi.org/10.3390/s22228783
Chicago/Turabian StylePaulauskas, Vytautas, Ludmiła Filina-Dawidowicz, and Donatas Paulauskas. 2022. "Navigation of Ships in Channel Bends under Special Conditions Using Sensors Systems" Sensors 22, no. 22: 8783. https://doi.org/10.3390/s22228783
APA StylePaulauskas, V., Filina-Dawidowicz, L., & Paulauskas, D. (2022). Navigation of Ships in Channel Bends under Special Conditions Using Sensors Systems. Sensors, 22(22), 8783. https://doi.org/10.3390/s22228783