





Use of Chipless RFID as a Passive, Printable Sensor Technology for Aerospace Strain and Temperature Monitoring



Abstract
:1. Introduction
1.1. Aerospace Sensing Requirements
1.2. Strain Sensing
1.3. Temperature Sensing
Existing Chipless RFID Temperature Sensor Designs
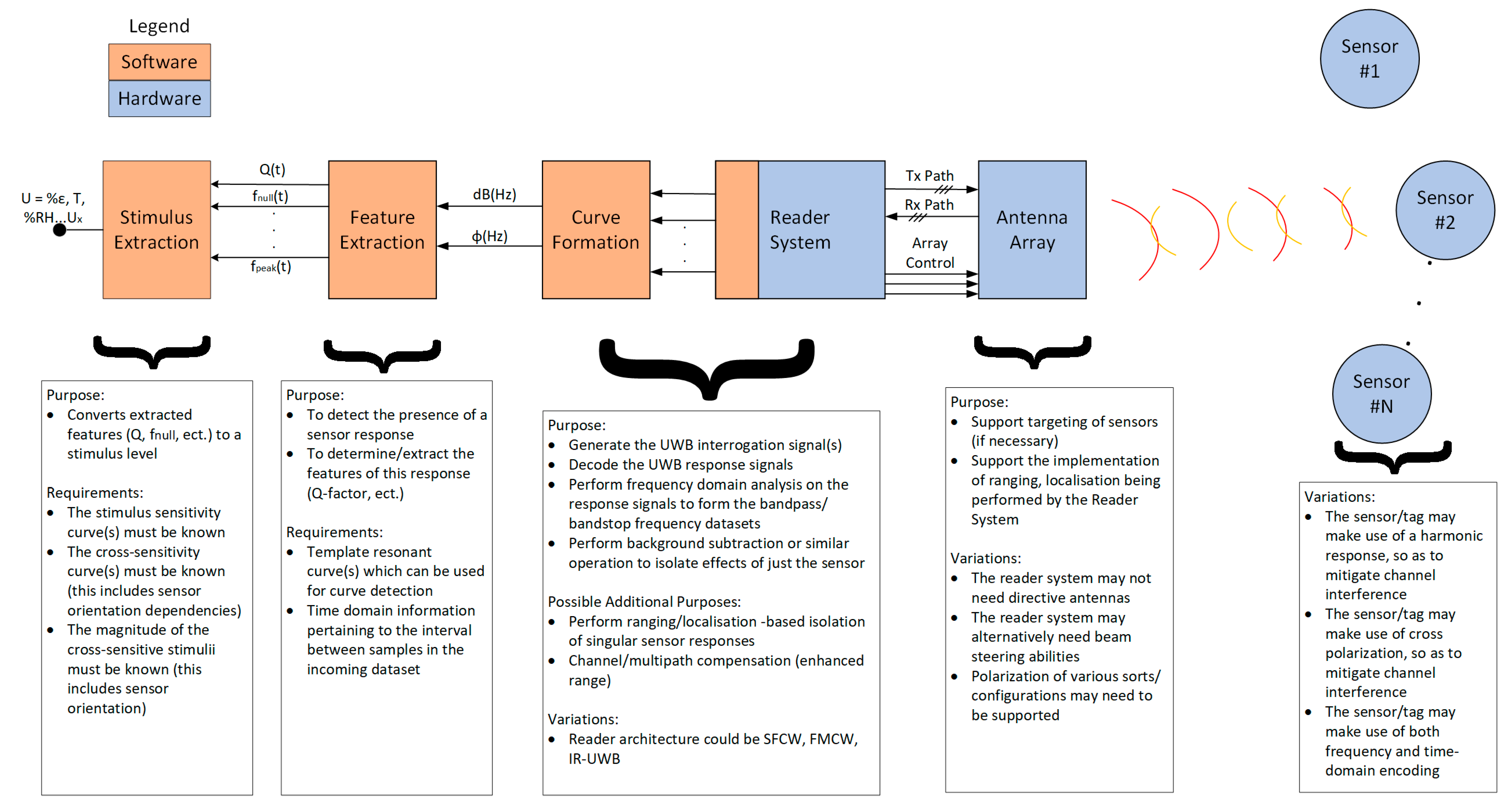
1.4. Interrogation System Overview
1.4.1. Well-Known Interrogation System Blocks
1.4.2. Feature Extraction Block
- How can we determine that a sensor response is present in the returned dataset?
- Where is the minimum point of this sensor response if one is present?
2. Materials and Methods
2.1. Strain Sensor Development and Testing
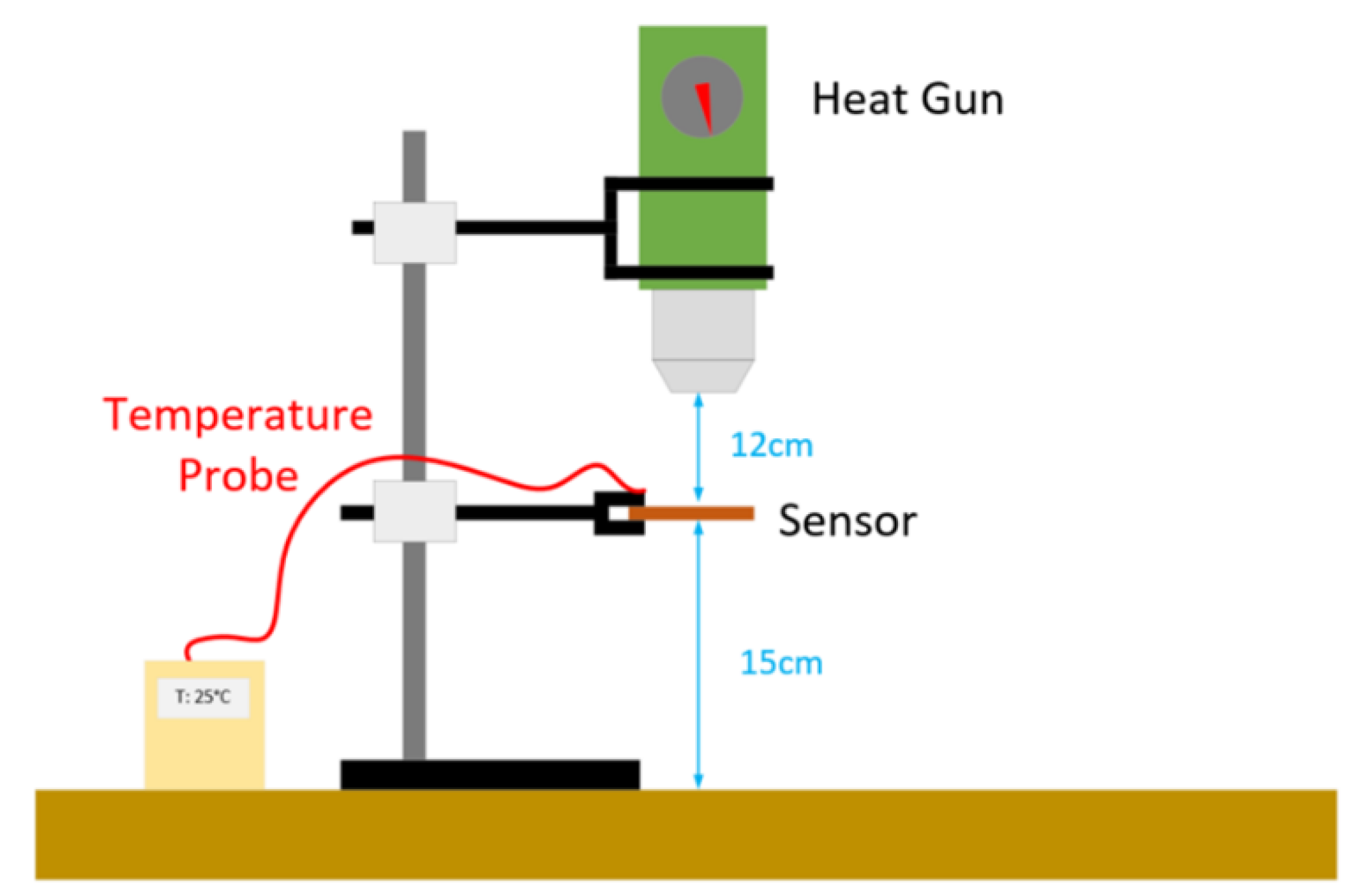
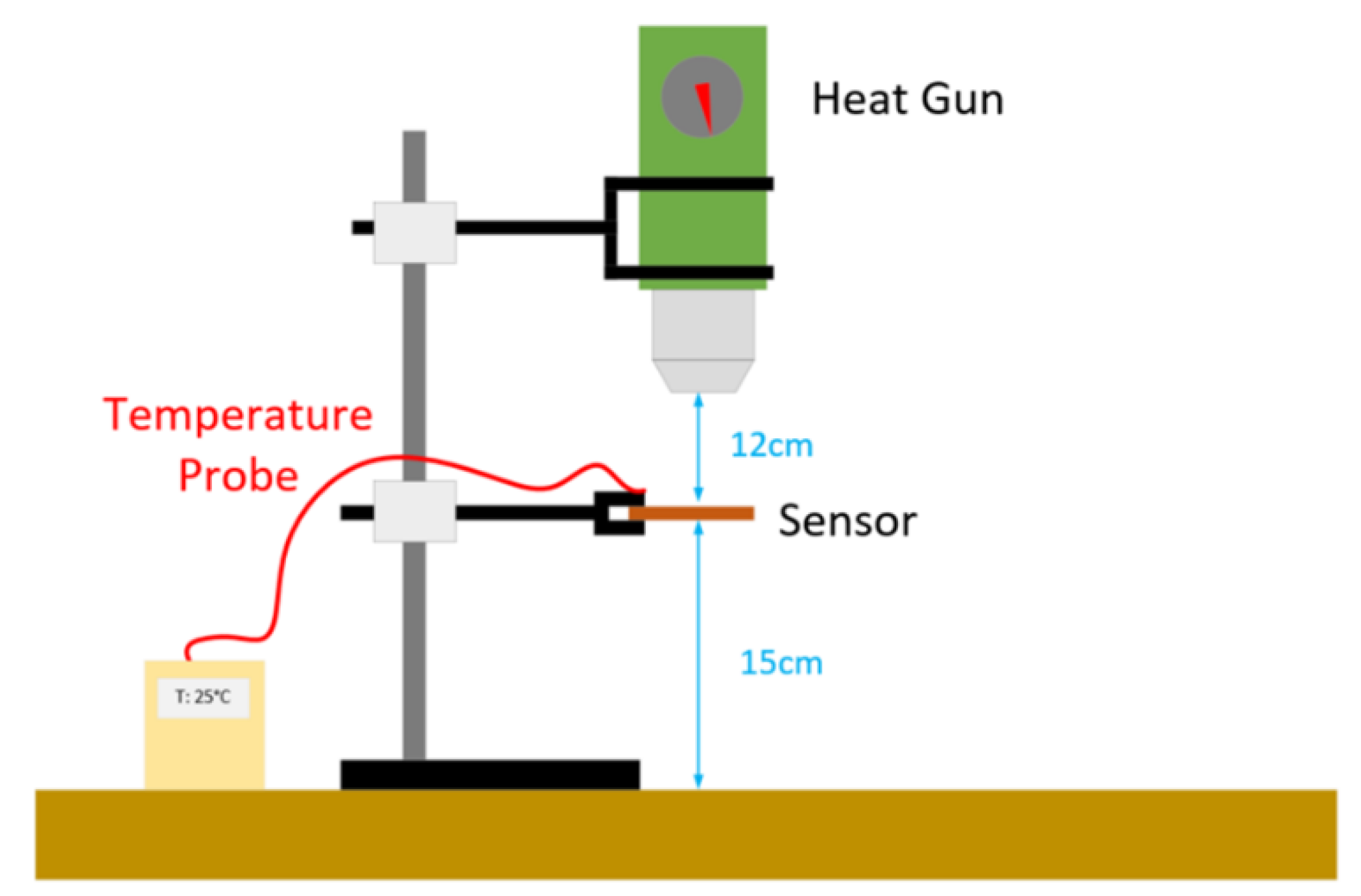
2.2. Temperature Sensor Development and Testing
2.3. Tag with Controllable Stimulus
2.4. Power Distribution Testing
3. Results and Discussion
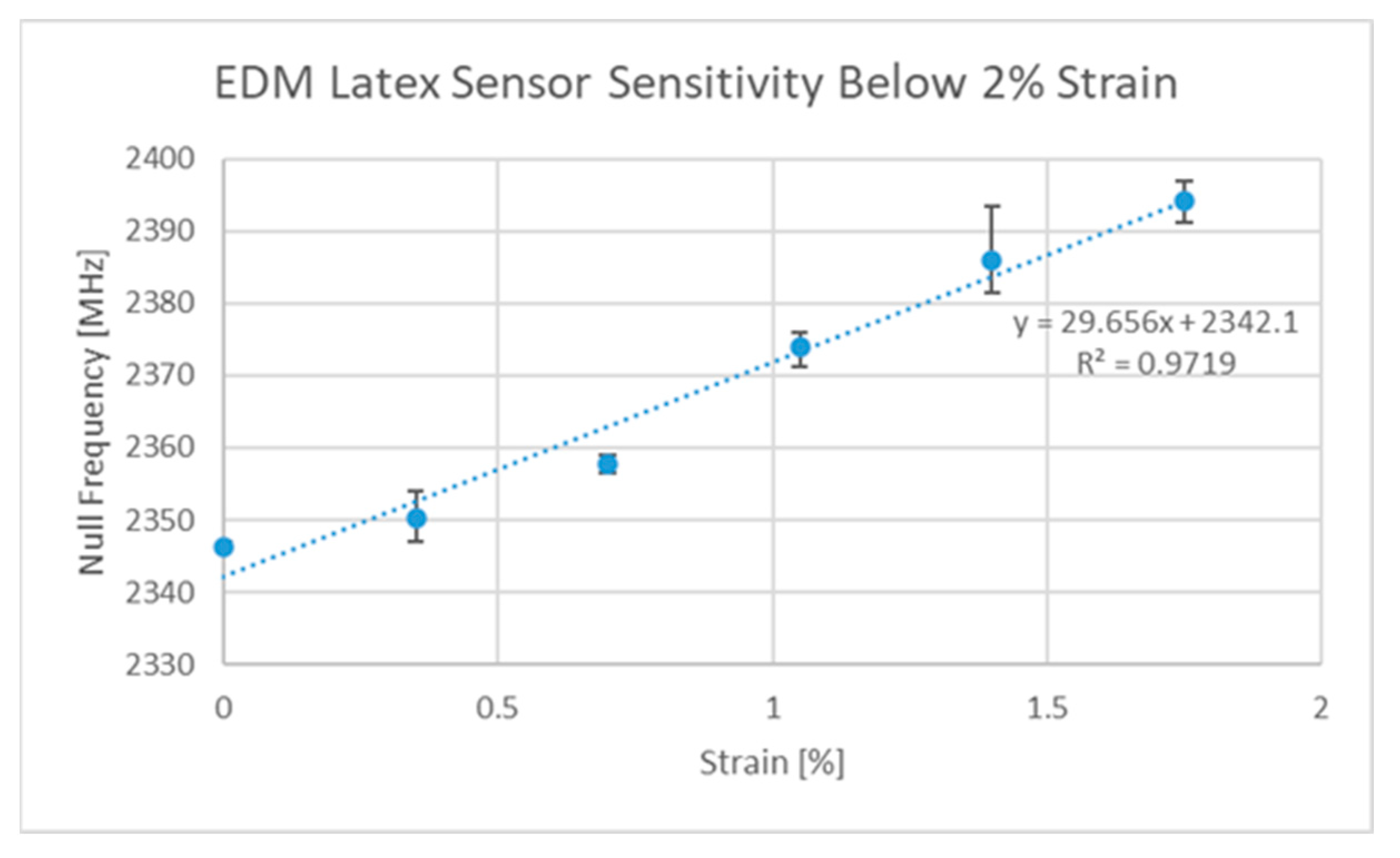
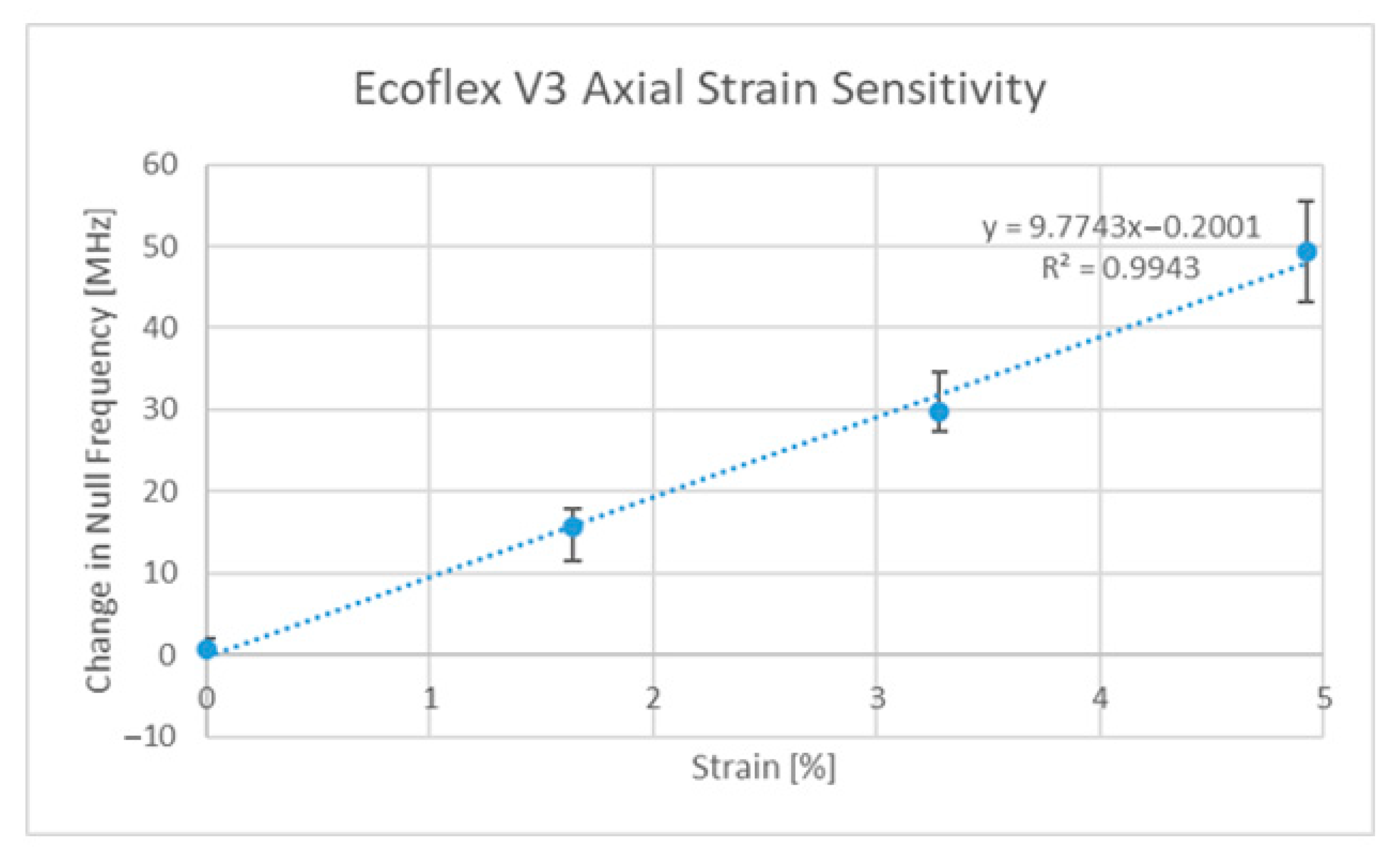
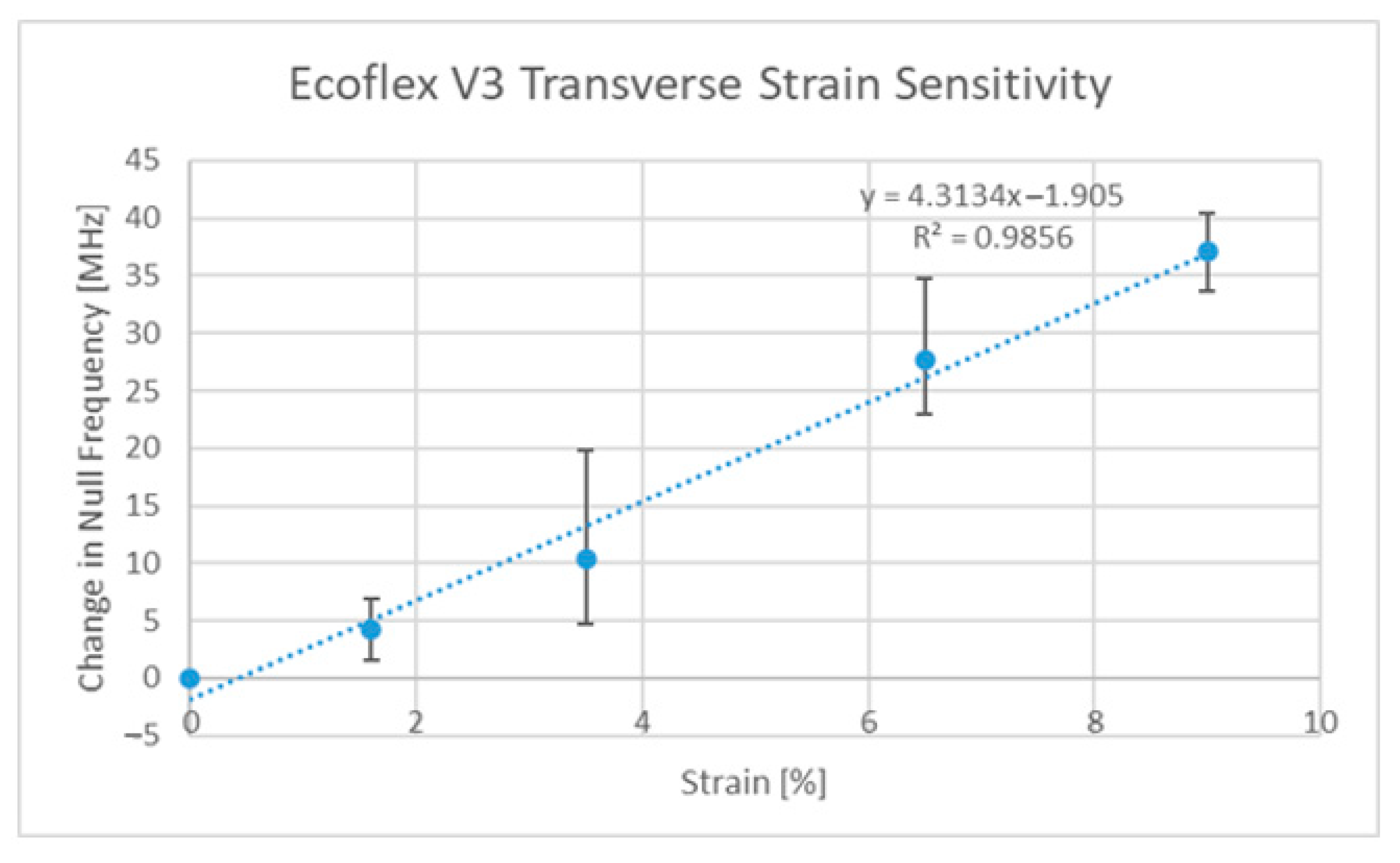
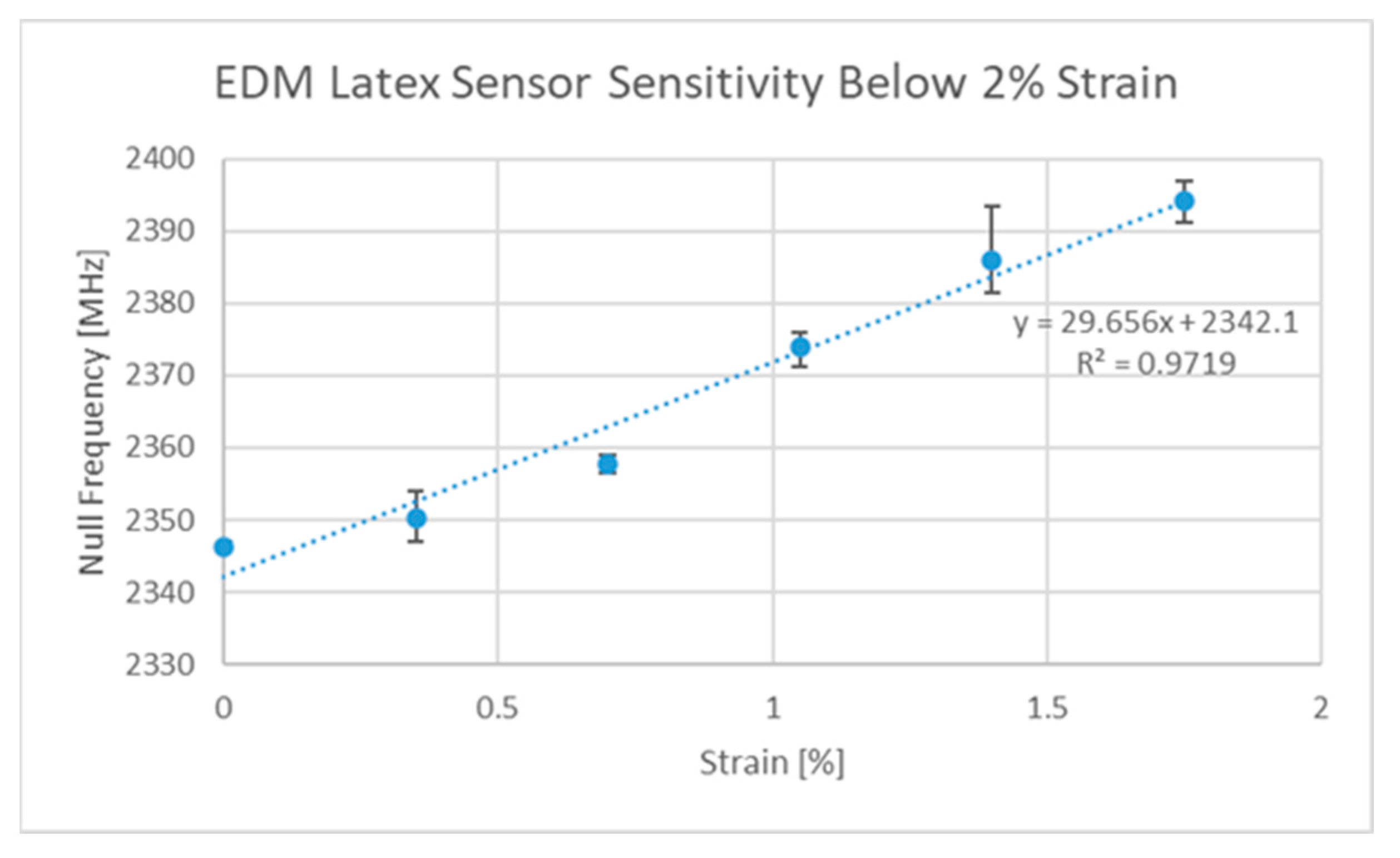
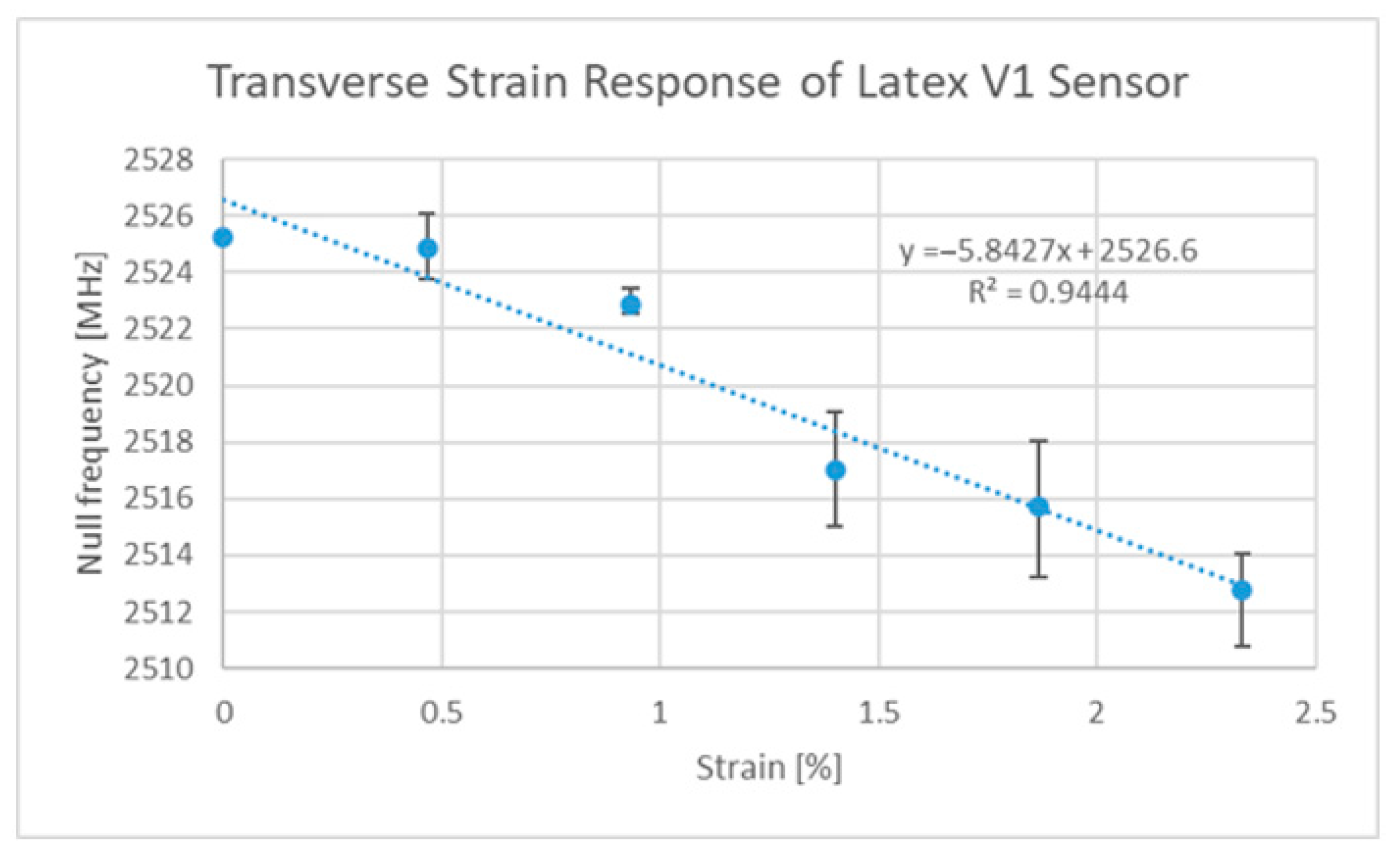
3.1. Strain Sensing
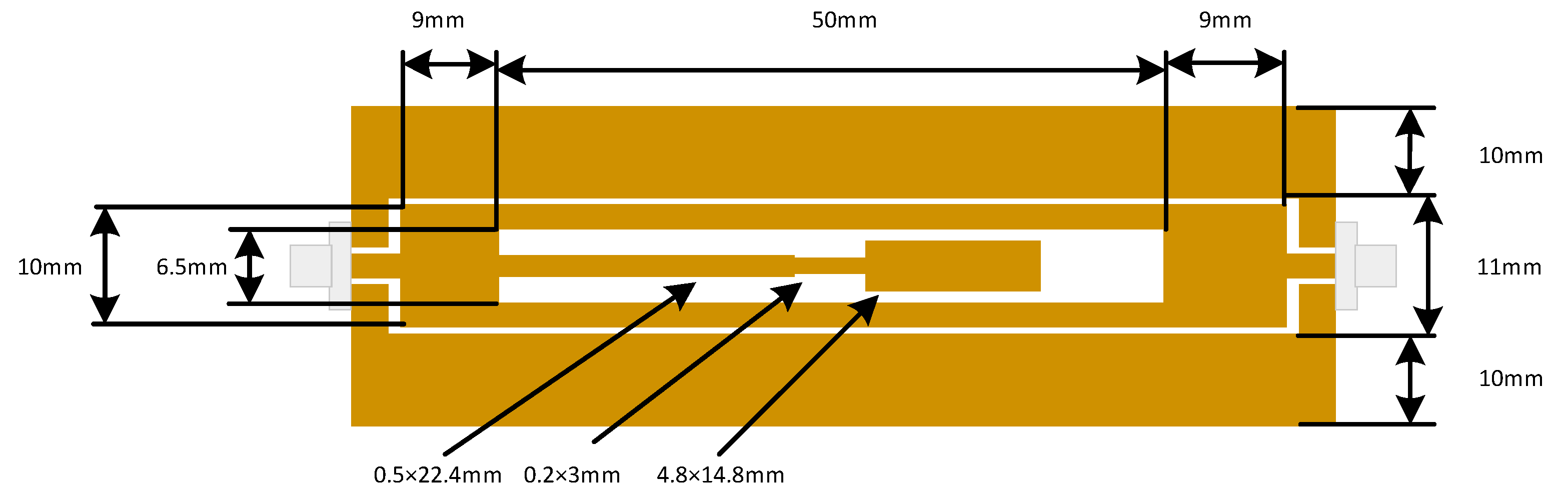
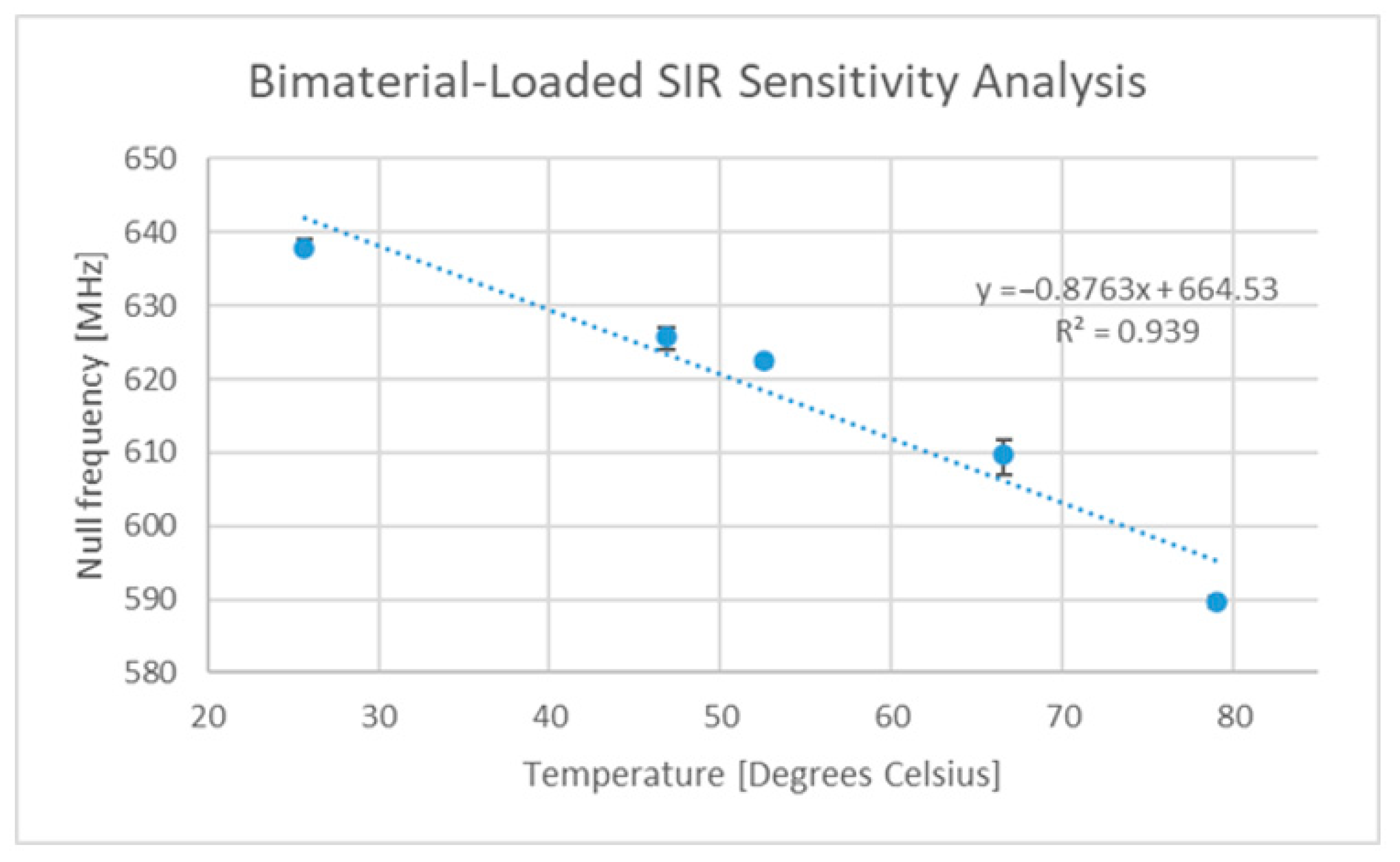
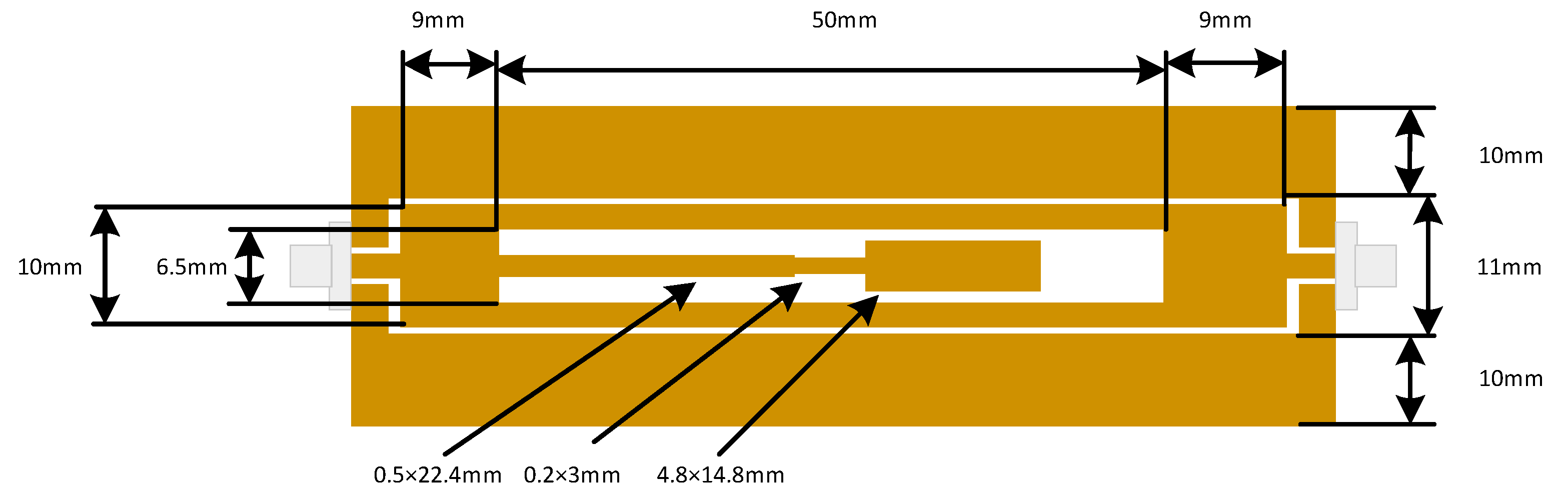
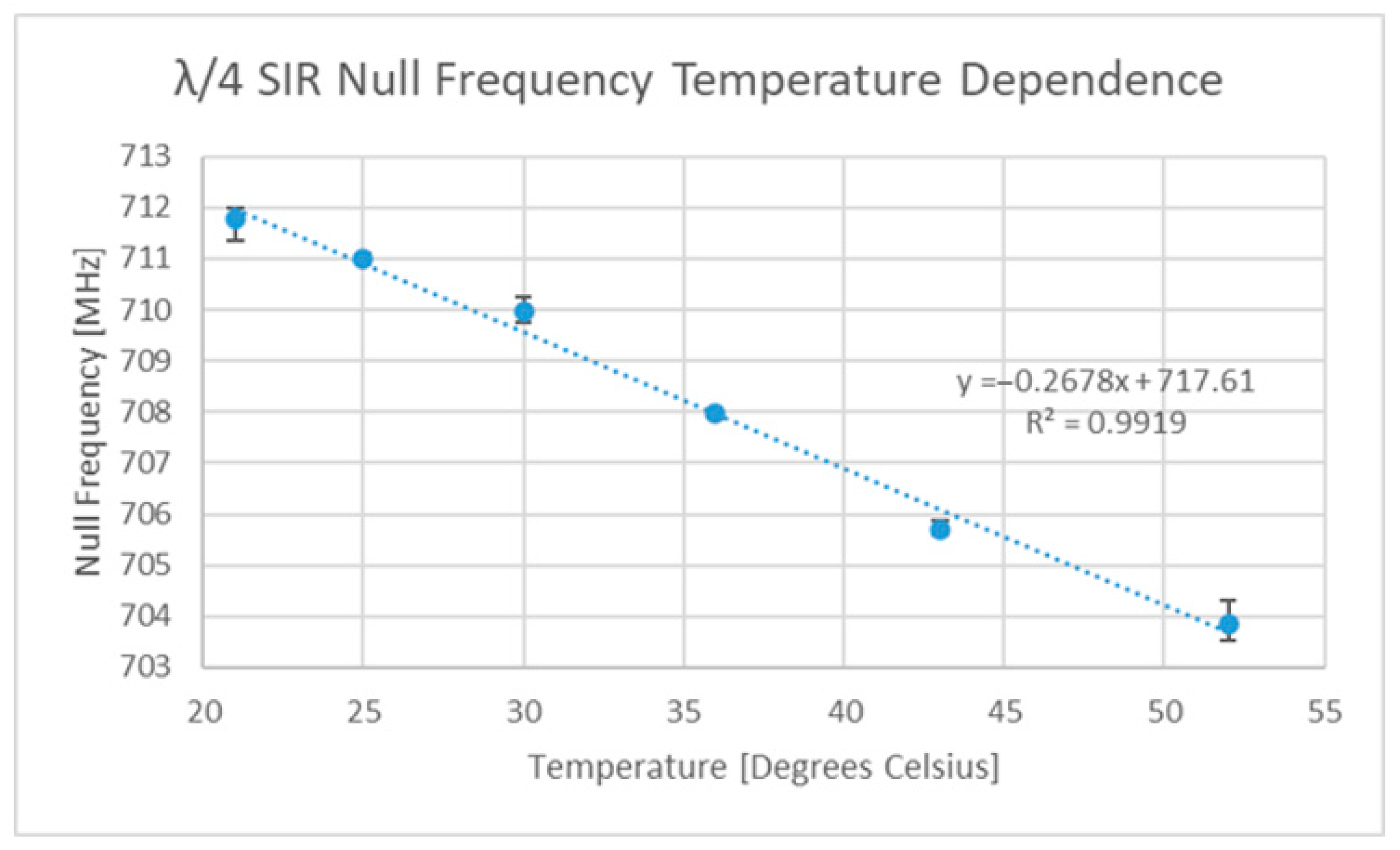
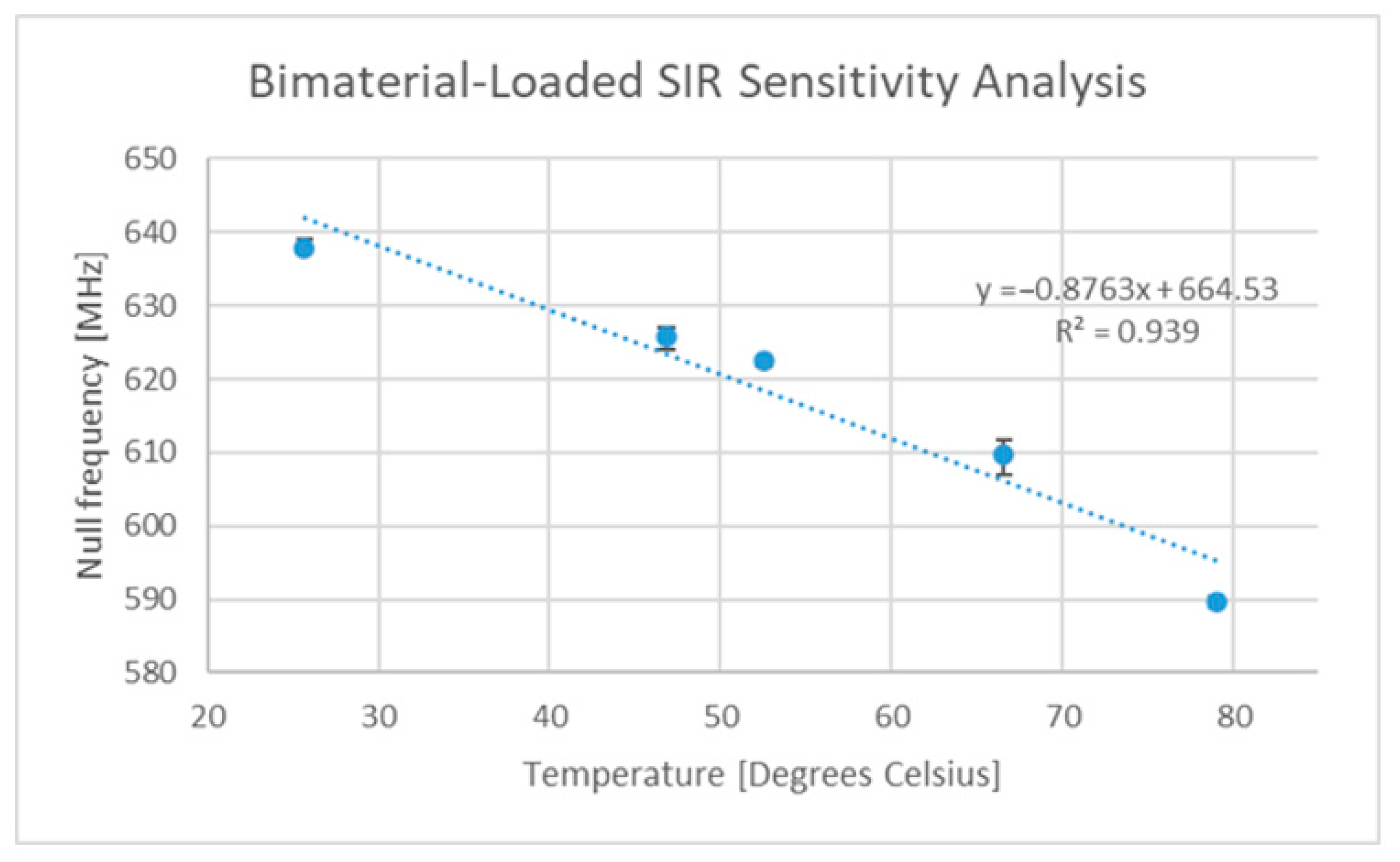
3.2. Novel Temperature Sensor Design
3.3. Survey on Sensor Interrogation
3.4. Impact of Sensor and Environmental Configuration
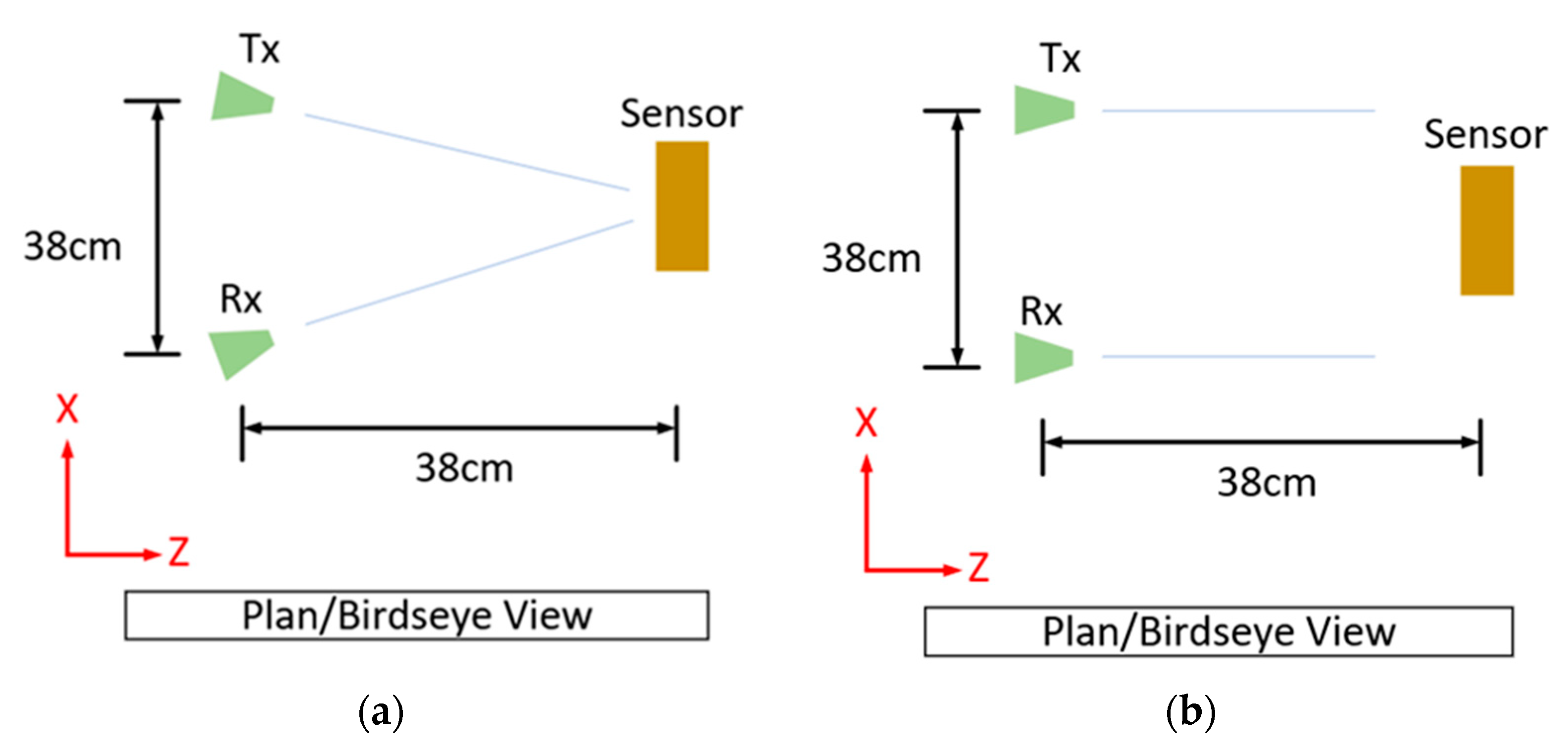
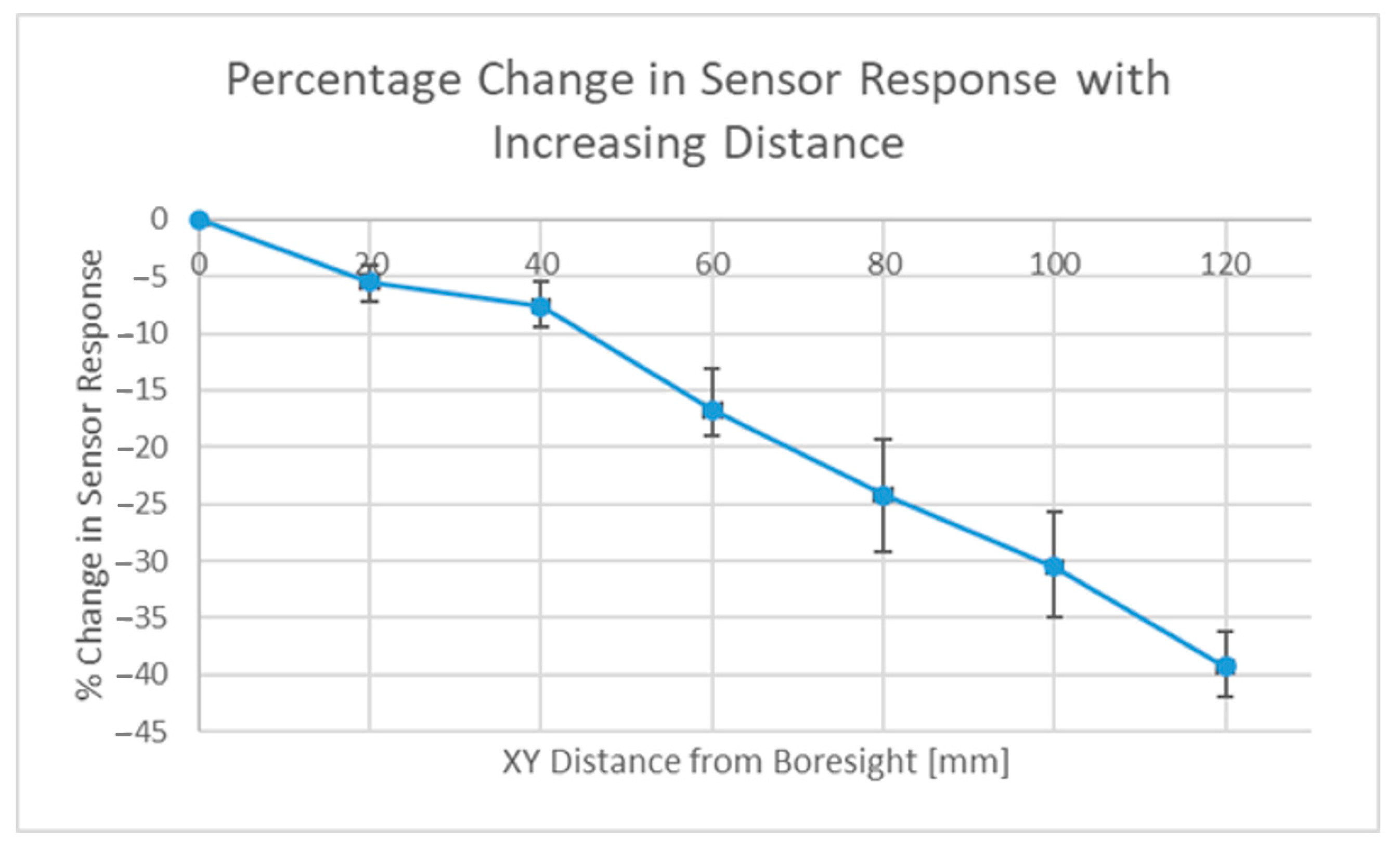
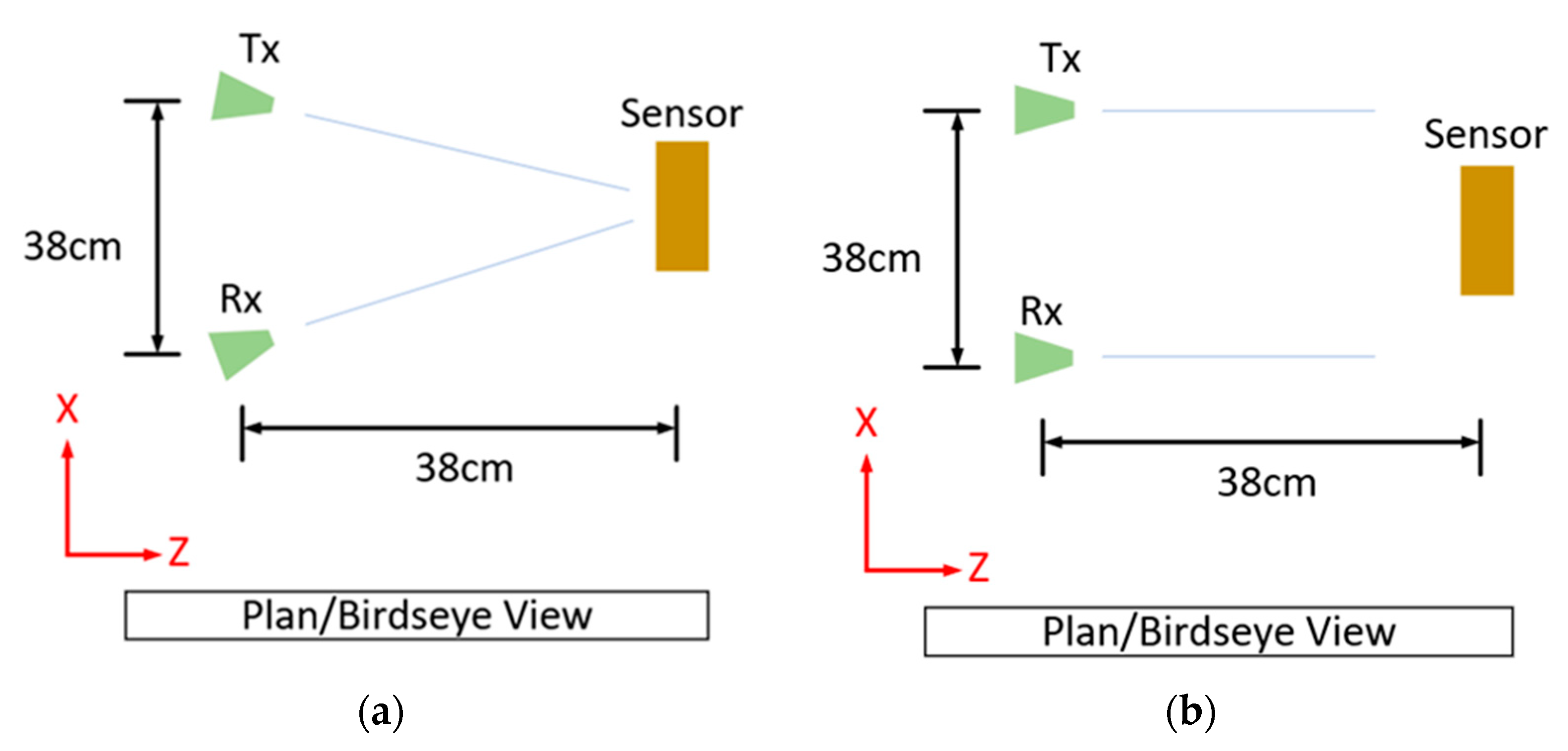
3.4.1. Sensor Orientation Effects
3.4.2. Effects of Nearby Materials
- In the case of polar polymers, their environmental dependencies can be highly frequency sensitive [78]. This means that the measurement made by a reference sensor operating at a different frequency may not be indicative of the dielectric properties experienced by the main sensor. Therefore, the frequency dependence of the dielectric properties of the total nearby materials may need to be known in advance of sensor operation;
- The sensitivity of the dielectric properties of various polymers to, e.g., temperature can be positive, negative, zero and/or nonlinear, which could lead to significant variations in the temperature sensitivity curve of the sensor;
- The response from different resonator designs seen in [27] appears to depend to differing degrees on the nearby dielectric materials. This may mean that, ideally, the reference sensor should have the same base geometry as that of the main sensor, otherwise one of said sensors may depend to a greater degree on the dielectric behavior of one portion of the dielectrics in the environment.
3.5. Potential Methods of Offloading Complexity from the Reader Architecture
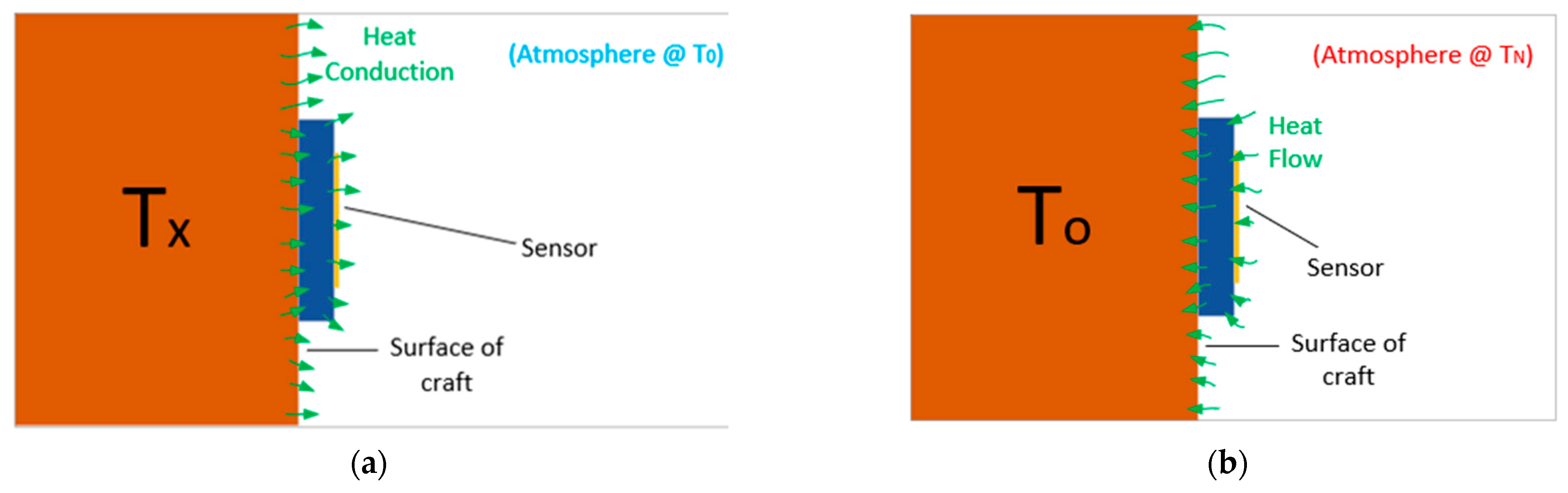
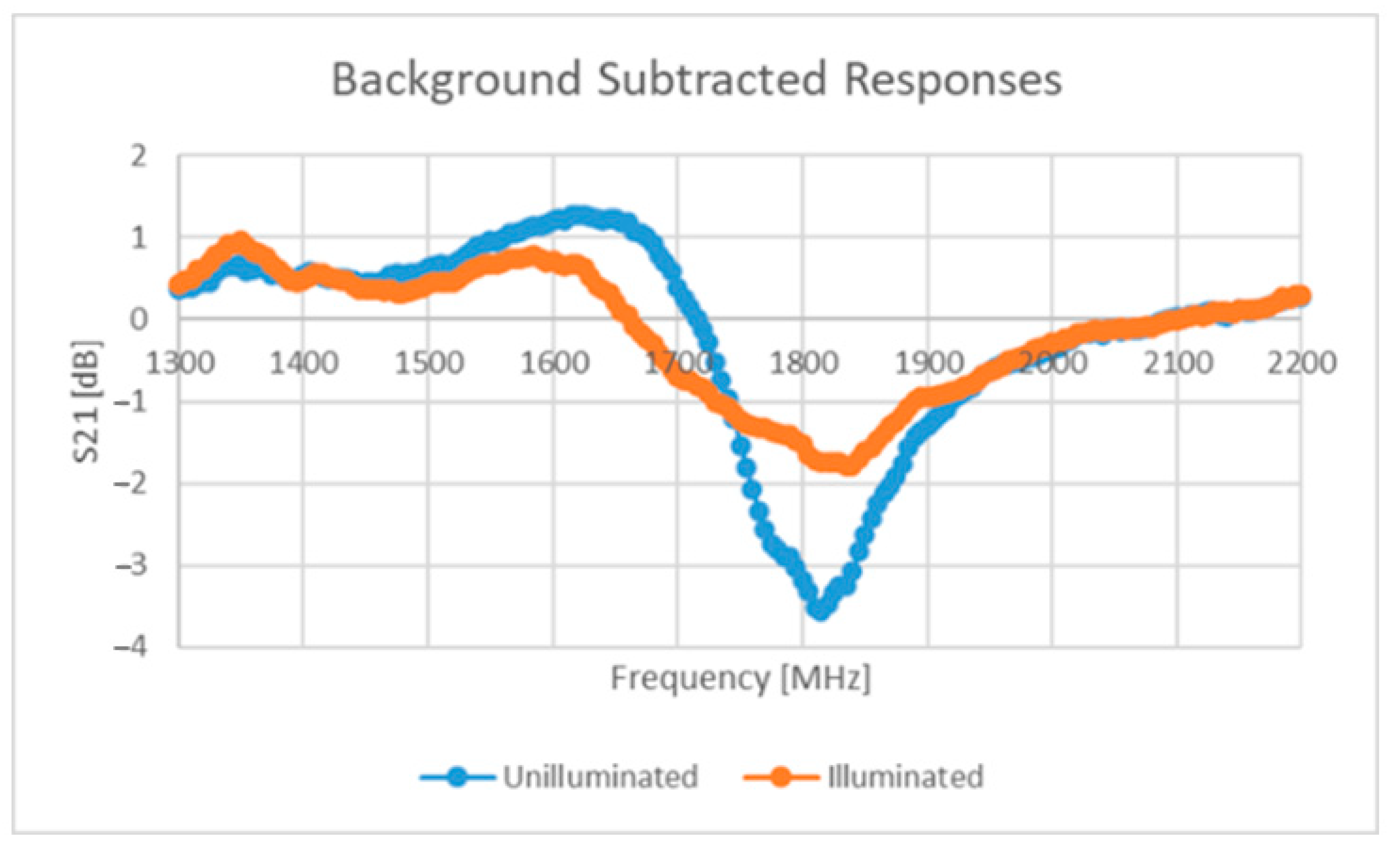
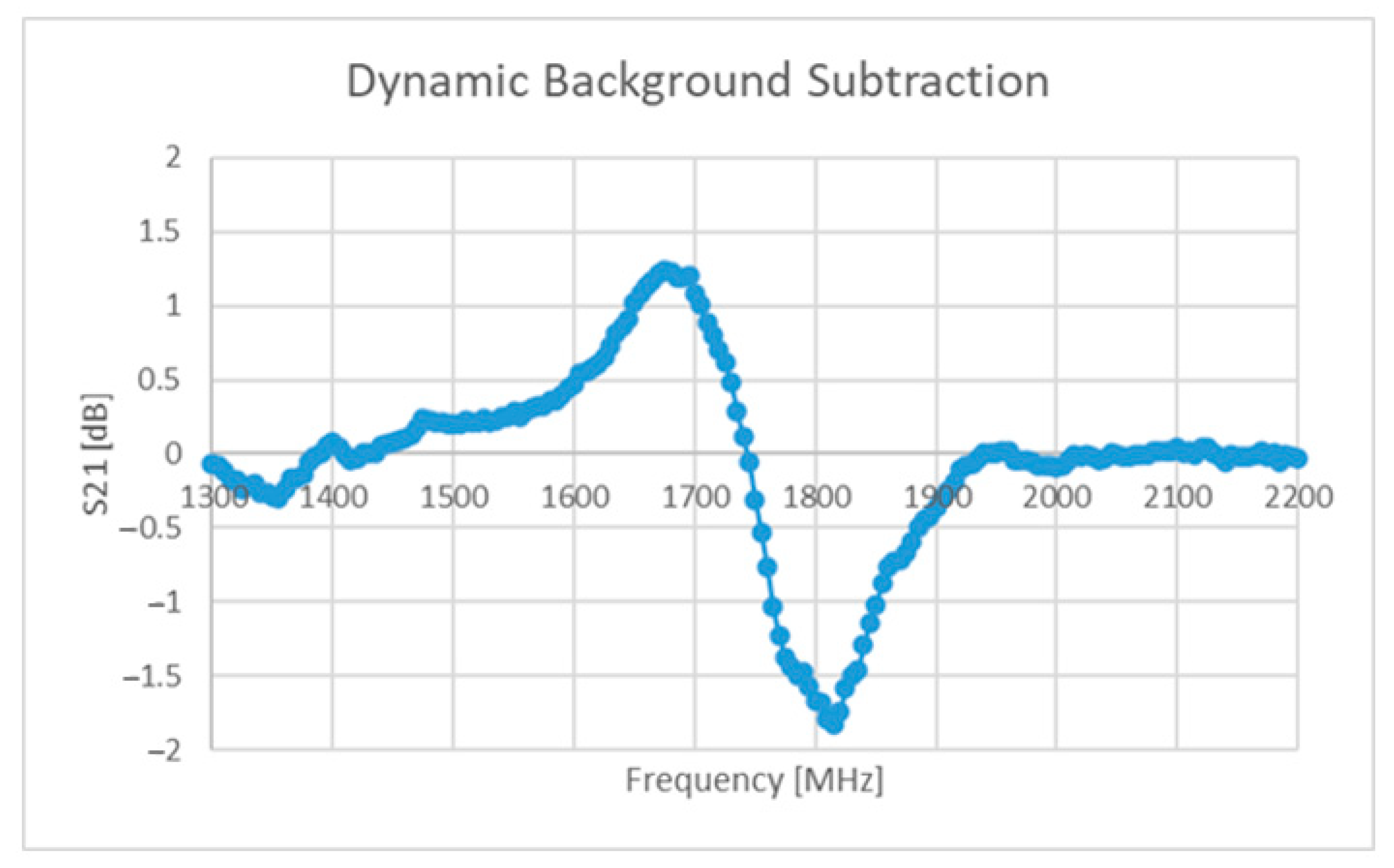
3.5.1. Tags with a Controllable Stimulus
- Further design is needed to ensure that a visual illumination system such as a laser or other such device can provide the necessary power to illuminate the LDR sufficiently;
- The laser device needs to have line of sight with the tag and needs to be steered appropriately;
- Appropriate filtering and/or semiconductor selection will be needed to ensure that only the laser can excite/illuminate the tag.
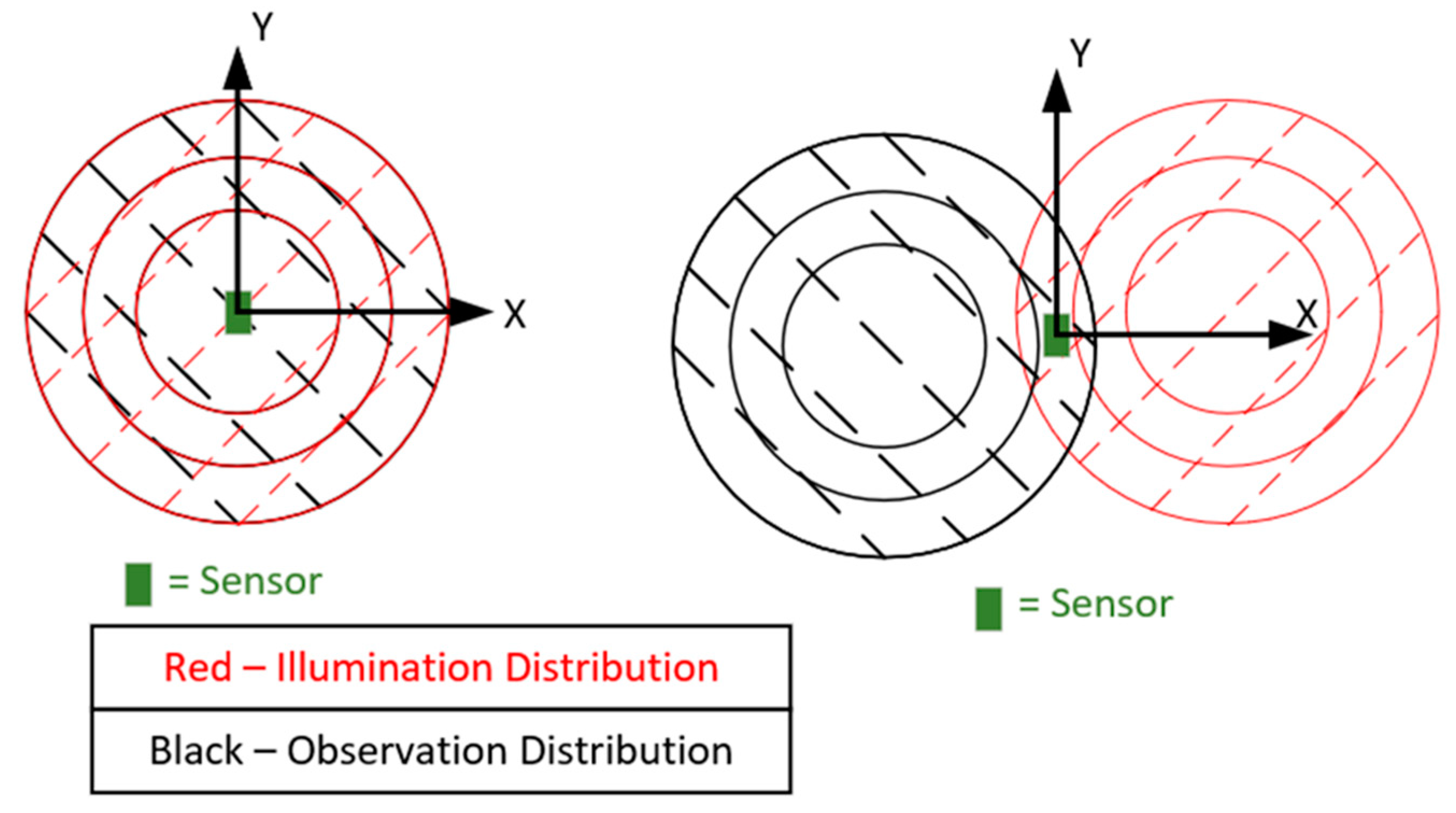
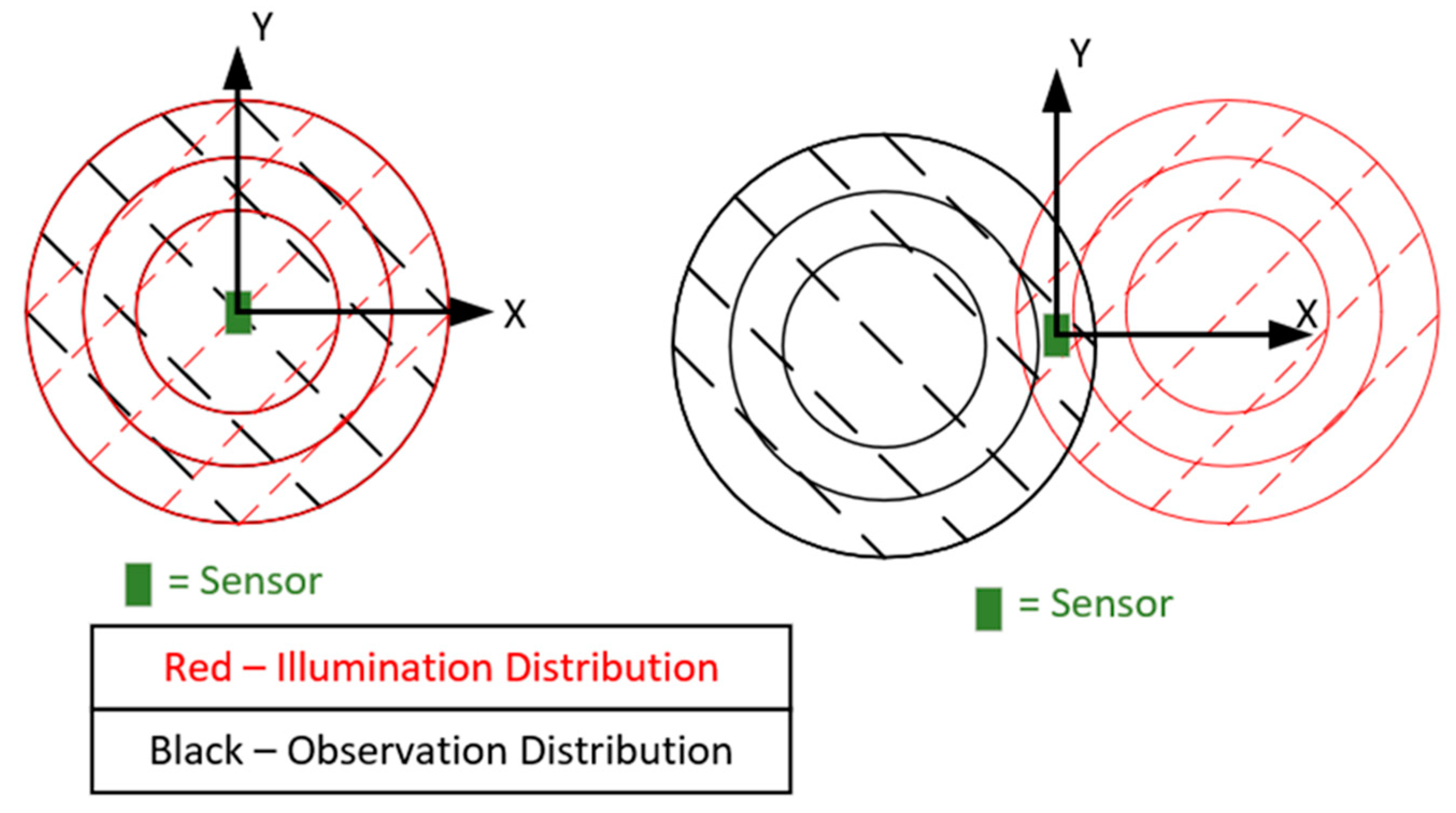
3.5.2. Partially Overlapped Interrogation Power Distributions
4. Conclusions
- The development/testing of in situ fabrication technologies and strain sensor designs that can support the rapid deposition of a highly sensitive strain gauge onto a variety of aerospace composites;
- The development and testing of a printable, highly sensitive temperature sensor capable of operation within the entire temperature range relevant for most aerospace applications;
- The design and implementation of a full interrogation system that will enable aerospace sensing requirements to be met, including resolution, range, multi-sensor support and interrogation time requirements.
Author Contributions
Funding

Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| RFID | Radio frequency identification |
| SHM | Structural health monitoring |
| LDR | Light dependent resistor |
| FBG | Fiber Bragg grating |
| ESA | European Space Agency |
| PMMA | Polymethylmethacrylate |
| RTD | Resistance temperature detector |
| BST | Barium strontium titanate |
| SIR | Stepped impedance resonator |
| PCB | Printed circuit board |
| IC | Integrated circuit |
| CFRP | Carbon-fiber-reinforced plastic |
| GFRP | Glass-fiber-reinforced plastic |
| SFCW | Stepped frequency continuous wave |
| FMCW | Frequency-modulated continuous wave |
| IR-UWB | Impulse radio ultrawideband |
| UWB | Ultrawideband |
| EM | Electromagnetic |
| RCS | Radar cross-section |
References
- Shao, B.; Amin, Y.; Chen, Q.; Liu, R.; Zheng, L.R. Directly printed packaging-paper-based chipless RFID tag with coplanar LC resonator. IEEE Antennas Wirel. Propag. Lett. 2013, 12, 325–328. [Google Scholar] [CrossRef]
- Ali, Z.; Perret, E.; Barbot, N.; Siragusa, R.; Hely, D.; Bernier, M.; Garet, F. Authentication Using Metallic Inkjet-Printed Chipless RFID Tags. IEEE Trans. Antennas Propag. 2020, 68, 4137–4142. [Google Scholar] [CrossRef]
- Gee, K.M.; Anandarajah, P.; Collins, D. A Review of Chipless Remote Sensing Solutions Based on RFID Technology. Sensors 2019, 19, 4829. [Google Scholar]
- Herrojo, C.; Paredes, F.; Mata-Contreras, J.; Martín, F. Chipless-RFID: A Review and Recent Developments. Sensors 2019, 19, 3385. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Nassar, I. Long-Range, Passive Wireless Monitoring Using Energy-Efficient, Electrically-Small Sensor Nodes and Harmonic Radar Interrogator; University of South Florida: Tampa, FL, USA, 2013; Available online: https://digitalcommons.usf.edu/etd/4923 (accessed on 16 August 2022).
- Gee, K.M.; Anandarajah, P.; Collins, D. Proof of Concept Novel Configurable Chipless RFID Strain Sensor. Sensors 2021, 21, 6224. [Google Scholar] [CrossRef]
- von Moll, A.; Behbahani, A.R.; Fralick, G.C.; Wrbanek, J.D.; Hunter, G.W. A Review of Exhaust Gas Temperature Sensing Techniques for Modern Turbine Engine Controls. In Proceedings of the 50th AIAA/ASME/SAE/ASEE Joint Propulsion Conference, Cleveland, OH, USA, 28–30 July 2014. [Google Scholar] [CrossRef]
- Wilson, W.C.; Juarez, P.D. Emerging needs for pervasive passive wireless sensor networks on aerospace vehicles. Procedia Comput. Sci. 2014, 37, 101–108. [Google Scholar] [CrossRef] [Green Version]
- Wilson, W.C.; Perey, D.F.; Atkinson, G.M.; Barclay, R.O. Passive wireless SAW sensors for IVHM. In Proceedings of the 2008 IEEE International Frequency Control Symposium, FCS, Honolulu, HI, USA, 19–21 May 2008; pp. 273–277. [Google Scholar] [CrossRef] [Green Version]
- Thomes, W.J., Jr.; Chuska, R.F.; Ott, M.N.; LaRocca, F.V.; Switzer, R.C.; Macmurphy, S.L. Fiber optic cable thermal preparation to ensure stable operation. In Optical Technologies for Arming, Safing, Fuzing, and Firing IV; SPIE: Washington, DC, USA, 2008; Volume 7070, p. 70700B. [Google Scholar] [CrossRef] [Green Version]
- NASA Technology Roadmaps TA10: Nanotechnology. 2015; p. 99. Available online: https://www.nasa.gov/sites/default/files/atoms/files/2015_nasa_technology_roadmaps_ta_10_nanotechnology_final.pdf (accessed on 1 September 2022).
- Window, A.L. Strain Gauge Technology, 2nd ed.; Elsevier: London, UK, 1992; pp. 1–90. [Google Scholar]
- Edwards, A.T. Comparison of Strain Gage and Fiber Optic Sensors on A Sting Balance in A Supersonic Wind Tunnel; Virginia Polytechnic Institute and State University: Blacksburg, VA, USA, 2000. [Google Scholar]
- Critchlow, E.F. Measurement and prediction of aircraft vibration. SAE Trans. 1944, 52, 368–379. Available online: https://www.jstor.org/stable/44468142 (accessed on 30 May 2022).
- Corda, S.; Franz, R.J.; Blanton, J.N.; Vachon, M.J.; Deboer, J.B. In-Flight Vibration Environment of the NASA F-15B Flight Test Fixture; NASA: Edwards, CA, USA, 2002. Available online: http://www.sti.nasa.gov (accessed on 26 May 2022).
- Israr, A. Vibration and modal analysis of low earth orbit satellite. Shock Vib. 2014, 2014, 740102. [Google Scholar] [CrossRef] [Green Version]
- Dong, T.; Kim, N.H. Cost-effectiveness of structural health monitoring in fuselage maintenance of the civil aviation industry. Aerospace 2018, 5, 87. [Google Scholar] [CrossRef]
- ESA. ESA Open Invitation To Tender [FR] AO8922-DIRECT PRINTING OF MECHANICAL AND THERMAL SENSORS ONTO SPACECRAFT HARDWARE. 2017. Available online: https://artes.esa.int/funding/direct-printing-mechanical-and-thermal-sensors-spacecraft-hardware-artes-4e073 (accessed on 10 October 2017).
- French, P.; Krijnen, G.; Roozeboom, F. Precision in harsh environments. Microsystems and Nanoengineering; Nature Publishing Group: London, UK, 2016; Volume 2, pp. 1–12. [Google Scholar] [CrossRef]
- Rodríguez-madrid, J.G.; Iriarte, G.F.; Williams, O.A.; Calle, F. Sensors and Actuators A: Physical High precision pressure sensors based on SAW devices in the GHz range. Sensors Actuators A. Phys. 2013, 189, 364–369. [Google Scholar] [CrossRef] [Green Version]
- Scheick, L.; Johnston, A.; Adell, P.; Mcclure, S. Total Ionizing Dose (TID) and Displacement Damage (DD) Effects in Integrated Circuits: Recent Results and the Implications for Emerging Technology. In Proceedings of the 10th International workshop on radiation effects on semiconductor devices for space applications, Tsukuba, Japan, 12 December 2012. [Google Scholar]
- Jiao, Z.; Jiang, L.; Sun, J.; Huang, J.; Zhu, Y. Outgassing Environment of Spacecraft: An Overview. IOP Conf. Ser. Mater. Sci. Eng. 2019, 611, 012071. [Google Scholar] [CrossRef] [Green Version]
- Povilus, A.P.; Wurden, C.J.; Vendeiro, Z.; Baquero-Ruiz, M.; Fajans, J. Vacuum compatibility of 3D-printed materials. J. Vac. Sci. Technol. Vac. Surf. Film. 2014, 32, 033001. [Google Scholar] [CrossRef] [Green Version]
- de Groh, K.K.; Banks, B.A.; Miller, S.K.R.; Dever, J.A. Chapter 28-Degradation of Spacecraft Materials. In Handbook of Environmental Degradation of Materials, 3rd ed.; Kutz, M., Ed.; William Andrew Publishing: Norwich, NY, USA, 2018; pp. 601–645. [Google Scholar] [CrossRef] [Green Version]
- de Rooij, A. The Oxidation of Silver by Atomic Oxygen; ESTEC: Noordwijk, The Netherlands, 1989. [Google Scholar]
- Leach, R.D.; Alexander, M.B. Failures and Anomalies Attributed to Spacecraft Charging; Volume 1375 of NASA Reference Publication; NASA: Huntsville, AL, USA, 1995. [Google Scholar]
- Gee, K.M.; Anandarajah, P.; Collins, D. Zero-Power Wireless Strain and Permittivity Sensor. In Proceedings of the 2022 33rd Irish Signals and Systems Conference (ISSC), Cork, Ireland, 9–10 June 2022; pp. 1–5. [Google Scholar] [CrossRef]
- Venkateshan, S.P. Mechanical Measurements, 2nd ed.; Springer: Cham, Switzerland, 2022; pp. 109–196. [Google Scholar]
- Morris, A.S.; Langari, R. Chapter 14 Temperature Measurement. In Measurement and Instrumentation: Theory and Application; Elsevier Science: Amsterdam, The Netherlands, 2015. [Google Scholar]
- Turner, J.; Watson, J. Automotive Sensors; Momentum Press: New York, NY, USA, 2009. [Google Scholar]
- Pollock, D.D. Thermocouples: Theory and properties, 1st ed.; CRC Press: Boca Raton, FL, USA, 1991. [Google Scholar]
- Wang, J. Sapphire Fiber Based Sensing Technologies for High Temperature Applications; Virginia Polytechnic Institute and State University: Blacksburg, VA, USA, 2011. [Google Scholar]
- Udd, E.; Spillman, W.B. Fiber Optic Sensors: An Introduction for Engineers and Scientists, 2nd ed.; John Wiley and Sons: Hoboken, NJ, USA, 2011; p. 402. [Google Scholar] [CrossRef]
- Requena, F.; Gilch, M.; Barbot, N.; Kaddour, D.; Siragusa, R.; Costa, F.; Genovesi, S.; Perret, E. Thermal Modeling of Resonant Scatterers and Reflectometry Approach for Remote Temperature Sensing. IEEE Trans. Microw. Theory Tech. 2021, 69, 4720–4734. [Google Scholar] [CrossRef]
- Gee, K.M.; Anandarajah, P.; Collins, D. Current Progress towards the Integration of Thermocouple and Chipless RFID Technologies and the Sensing of a Dynamic Stimulus. Micromachines 2020, 11, 1019. [Google Scholar] [CrossRef]
- Nikfalazar, M.; Sazegar, M.; Zheng, Y.; Wiens, A.; Jakoby, R.; Friederich, A.; Kohler, C.; Binder, J.R. Compact tunable phase shifter based on inkjet printed BST thick-films for phased-array application. In Proceedings of the 2013 European Microwave Conference, Nuremberg, Germany, 6–10 October 2013; pp. 432–435. [Google Scholar] [CrossRef]
- Sakai, Y.; Futakuchi, T.; Iijima, T.; Adachi, M. Preparation of (Ba,Sr)TiO3 thick film on ZrO2 substrates by Inkjet printing. Japanese J. Appl. Phys. Part 1 Regul. Pap. Short Notes Rev. Pap. 2006, 45, 846–849. [Google Scholar] [CrossRef]
- Nikfalazar, M.; Sazegar, M.; Friederich, A.; Kohler, C.; Zheng, Y.; Wiens, A.; Binder, J.; Jakoby, R. Inkjet printed BST thick-films for X-band phase shifter and phased array applications. In Proceedings of the 2013 International Workshop on Antenna Technology (iWAT), Karlsruhe, Germany, 4–6 March 2013; pp. 121–124. [Google Scholar] [CrossRef] [Green Version]
- Sebastian, M.T.; Jantunen, H. Low loss dielectric materials for LTCC applications: A review. Int. Mater. Rev. 2013, 53, 57–90. [Google Scholar] [CrossRef]
- Taubenrauch, E.; Wirth, I. Printed Strain Gauges for Aircraft Load Detection Using Aerosol Jet® Printing. Fraunhofer IFAM. 2011. Available online: https://www.optomec.com/wp-content/uploads/2014/02/Printed_Strain_Gauges_for-Aircraft_Load_Detection_IFAM.pdf (accessed on 8 August 2022).
- Raja, A.M.L.; Ai, D.R.; Astanti, I. A Clustering Classification of Spare Parts for Improving Inventory Policies. IOP Conf. Ser. Mater. Sci. Eng. 2016, 114, 012075. [Google Scholar] [CrossRef]
- Aliasgari, J.; Fathi, P.; Forouzandeh, M.; Karmakar, N. IR-UWB Chipless RFID Reader Based on Frequency Translation Technique for Decoding Frequency-Coded Tags. IEEE Trans. Instrum. Meas. 2021, 70, 1–11. [Google Scholar] [CrossRef]
- Garbati, M.; Perret, E.; Siragusa, R.; Halopé, C. Ultrawideband Chipless RFID: Reader Technology from SFCW to IR-UWB. IEEE Microw. Mag. 2019, 20, 74–88. [Google Scholar] [CrossRef]
- Karmakar, N.C.; Koswatta, R.; Kalansuriya, P.; E-Azim, R. Chipless RFID Reader Architecture; Artech House: Norwood, MA, USA, 2013. [Google Scholar]
- Karmakar, N.C.; Kalansuriya, P.; Azim, R.E.; Koswatta, R. Chipless Radio Frequency Identification Reader Signal Processing; Wiley: Hoboken, NJ, USA, 2016; pp. 153–213. [Google Scholar]
- Marindra, A.M.J. Chipless RFID Sensor Systems for Structural Health Monitoring; Newcastle University: Newcastle, UK, 2020; Available online: http://theses.ncl.ac.uk/jspui/handle/10443/5308 (accessed on 19 September 2022).
- Megahed, A.F. Realistic Chipless RFID: Identification and Localization; University of Duisburg-Essen: Duisburg, Germany, 2016; Available online: https://duepublico2.uni-due.de/servlets/MCRFileNodeServlet/duepublico_derivate_00044321/Megahed_Diss.pdf (accessed on 10 September 2022).
- Lazaro, A.; Villarino, R.; Girbau, D. A Passive Harmonic Tag for Humidity Sensing. Int. J. Antennas Propag. 2014, 2014, 670345. [Google Scholar] [CrossRef] [Green Version]
- Abdelnour, A.; Lazaro, A.; Villarino, R.; Kaddour, D.; Tedjini, S.; Girbau, D. Passive Harmonic RFID System for Buried Assets Localization. Sensors 2018, 18, 3635. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Costa, F.; Gentile, A.; Genovesi, S.; Buoncristiani, L.; Lazaro, A.; Villarino, R.; Girbau, D. A Depolarizing Chipless RF Label for Dielectric Permittivity Sensing. IEEE Microw. Wirel. Components Lett. 2018, 28, 371–373. [Google Scholar] [CrossRef]
- di Sante, R. Fibre optic sensors for structural health monitoring of aircraft composite structures: Recent advances and applications. Sensors 2015, 15, 18666–18713. [Google Scholar] [CrossRef] [PubMed]
- Simon, D.L.; Semega, K.J. Sensor Needs for Control and Health Management of Intelligent Aircraft Engines. 2004. Available online: http://gltrs.grc.nasa.gov (accessed on 6 July 2020).
- Barbot, N.; Rance, O.; Perret, E. Classical RFID Versus Chipless RFID Read Range: Is Linearity a Friend or a Foe? IEEE Trans. Microw. Theory Tech. 2021, 69, 4199–4208. [Google Scholar] [CrossRef]
- Costa, F.; Genovesi, S.; Monorchio, A. A chipless RFID based on multiresonant high-impedance surfaces. IEEE Trans. Microw. Theory Tech. 2013, 61, 146–153. [Google Scholar] [CrossRef]
- Manara, G.; Costa, F.; Genovesi, S.; Terranova, S.; Dicandia, F.A.; Borgese, M.; Monti, L.; Boggioni, L.; Lazaro, A.; Villarino, R.; et al. EMERGENT project: Chipless multisensor RFID for green networks. In Proceedings of the 2019 IEEE International Conference on RFID Technology and Applications (RFID-TA), Pisa, Italy, 25–27 September 2019; pp. 187–191. [Google Scholar] [CrossRef]
- Svanda, M.; Machac, J.; Polivka, M.; Havlova, S.; Fitl, P.; Vrnata, M. Chipless RFID tag with enhanced RCS used as a phthalocyanine-based solvent vapors sensor. IEEE Antennas Wirel. Propag. Lett. 2020, 19, 1556–1560. [Google Scholar] [CrossRef]
- Lazaro, A.; Villarino, R.; Costa, F.; Genovesi, S.; Gentile, A.; Buoncristiani, L.; Girbau, D. Chipless Dielectric Constant Sensor for Structural Health Testing. IEEE Sens. J. 2018, 18, 5576–5585. [Google Scholar] [CrossRef] [Green Version]
- Ali, A.; Smartt, C.; Im, J.; Mackenzie, R.; Williams, O.; Lester, E.; Greedy, S. Impact of Dielectric Substrates on Chipless RFID Tag Performance. In International Journal of Microwave and Wireless Technologies; Cambridge University Press: Cambridge, UK, 2022; pp. 1–11. [Google Scholar]
- Aliasgari, J.; Karmakar, N.C. Mathematical model of chipless rfid tags for detection improvement. IEEE Trans. Microw. Theory Tech. 2020, 68, 4103–4115. [Google Scholar] [CrossRef]
- Habib, S.; Ali, A.; Kiani, G.I.; Ayub, W.; Abbas, S.M.; Butt, M.F.U. A low-profile FSS-based high capacity chipless RFID tag for sensing and encoding applications. Int. J. Microw. Wirel. Technol. 2022, 14, 176–184. [Google Scholar] [CrossRef]
- Amin, E.M.; Karmakar, N.C.; Jensen, B.W. Fully printable chipless RFID multi-parameter sensor. Sensors Actuators A Phys. 2016, 248, 223–232. [Google Scholar] [CrossRef]
- Dhouibi, A.; Burokur, S.N.; de Lustrac, A.; Priou, A. Study and analysis of an electric Z-shaped meta-atom. Adv. Electromagn. 2012, 1, 64–70. [Google Scholar] [CrossRef] [Green Version]
- EcoflexTM 00-30 Product Information | Smooth-On, Inc. Available online: https://www.smooth-on.com/products/ecoflex-00-30/ (accessed on 29 July 2021).
- Amin, E.M.; Karmakar, N. Development of a chipless RFID temperature sensor using cascaded spiral resonators. In Proceedings of the 2011 IEEE SENSORS Proceedings, Limerick, Ireland, 28–31 October 2011; pp. 554–557. [Google Scholar] [CrossRef]
- Ren, Q.Y.; Wang, L.F.; Huang, J.Q.; Zhang, C.; Huang, Q.A. Simultaneous Remote Sensing of Temperature and Humidity by LC-Type Passive Wireless Sensors. J. Microelectromech. Syst. 2015, 24, 1117–1123. [Google Scholar] [CrossRef]
- Eyebe, G.A.; Rasolomboahanginjatovo, A.H.; Bideau, B.; Domingue, F. Investigation on temperature-dependent dielectric properties of ETFE fluoropolymer for microwave temperature sensing applications. Sensors Actuators A Phys. 2019, 290, 215–221. [Google Scholar] [CrossRef]
- Amin, E.; Karmakar, N.; Rfid, A.C.; Sensor, P.D. Partial Discharge Monitoring of High Voltage Equipment Using Chipless RFID Sensor. Asia-Pac. Microw. Conf. 2011, 2011, 1522–1525. [Google Scholar]
- Amin, E.M.; Bhattacharyya, R.; Sarma, S.; Karmakar, N.C. Chipless RFID tag for light sensing. In Proceedings of the 2014 IEEE Antennas and Propagation Society International Symposium (APSURSI), Memphis, TN, USA, 6–11 July 2014; pp. 1308–1309. [Google Scholar] [CrossRef]
- Kubina, B.; Schusler, M.; Mandel, C.; Mehmood, A.; Jakoby, R. Wireless high-temperature sensing with a chipless tag based on a dielectric resonator antenna. In Proceedings of the SENSORS, 2013 IEEE, Baltimore, MD, USA, 3–6 November 2013; pp. 1–4. [Google Scholar] [CrossRef]
- Shi, X.; Yang, F.; Xu, S.; Li, M. A Passive Temperature-Sensing Antenna Based on a Bimetal Strip Coil. Sensors 2017, 17, 665. [Google Scholar] [CrossRef] [Green Version]
- Thai, T.T.; Chebila, F.; Mehdi, J.M.; Pons, P.; Aubert, H.; DeJean, G.R.; Tentzeris, M.M.; Plana, R. A novel passive ultrasensitive RF temperature transducer for remote sensing and identification utilizing radar cross sections variability. In Proceedings of the 2010 IEEE International Symposium on Antennas and Propagation and CNC-USNC/URSI Radio Science Meeting-Leading the Wave, AP-S/URSI 2010, Toronto, ON, Canada, 11–17 July 2010; pp. 1–4. [Google Scholar] [CrossRef]
- Ebnesajjad, S.; Landrock, A.H. Adhesives Technology Handbook, 3rd ed.; Elsevier: Amsterdam, The Netherlands, 2015. [Google Scholar]
- Pozar, D.M. Microwave Engineering, 4th ed.; Wiley: New York, NY, USA, 2012; pp. 661–719. [Google Scholar]
- Porter, C.E.; Blum, F.D. Thermal Characterization of PMMA Thin Films Using Modulated Differential Scanning Calorimetry. Macromolecules 2000, 33, 7016–7020. [Google Scholar] [CrossRef]
- Ma, Z.; Jiang, Y. High-Density 3D Printable Chipless RFID Tag with Structure of Passive Slot Rings. Sensors 2019, 19, 2535. [Google Scholar] [CrossRef] [Green Version]
- Wan, G.; Kang, W.; Wang, C.; Li, W.; Li, M.; Xie, L.; Chen, L. Separating strain sensor based on dual-resonant circular patch antenna with chipless RFID tag. Smart Mater. Struct. 2020, 30, 015007. [Google Scholar] [CrossRef]
- Knott, E.F.; Shaeffer, J.F.; Tuley, M.T. Radar Cross Section, 2nd ed.; Scitech Publishing: Raleigh, NC, USA, 2004; pp. 405–447. [Google Scholar]
- Riddle, B.; Baker-Jarvis, J.; Krupka, J. Complex permittivity measurements of common plastics over variable temperatures. IEEE Trans. Microw. Theory Tech. 2003, 51, 727–733. [Google Scholar] [CrossRef]
- Min, S.H.; Kim, H.J.; Quan, Y.J.; Kim, H.S.; Lyu, J.H.; Lee, G.Y.; Ahn, S.H. Stretchable chipless RFID multi-strain sensors using direct printing of aerosolised nanocomposite. Sensors Actuators A Phys. 2020, 313, 112224. [Google Scholar] [CrossRef]
- Shen, J.; Zeng, X.; Luo, Y.; Cao, C.; Wang, T. Research on strain measurements of core positions for the Chinese space station. Sensors 2018, 6, 1834. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Barahona, M.; Betancourt, D.; Ellinger, F. Decoding of multiple same-coded in-line placed chipless RFID tags. In Proceedings of the 2014 IEEE Conference on Antenna Measurements & Applications (CAMA), Antibes Juan-les-Pins, France, 16–19 November 2014. [Google Scholar]
- Henry, D.; Marchal, T.; Philippe, J.; Pons, P.; Aubert, H. Identification of Chipless Sensors in Cluttered Environments from 3D Radar Imagery and Polarimetry. In Proceedings of the 2020 XXXIIIrd General Assembly and Scientific Symposium of the International Union of Radio Science, Rome, Italy, 29 August–5 September 2020. [Google Scholar] [CrossRef]
- Henry, D.; Aubert, H.; Pons, P. Radar imaging approach for zero-power millimeter-wave wireless sensors. In Proceedings of the 2019 IEEE International Conference on RFID Technology and Applications (RFID-TA), Pisa, Italy, 25–27 September 2019; pp. 89–94. [Google Scholar] [CrossRef]
- Streetman, B.G.; Banerjee, S.K. Solid State Electronic Devices, 6th ed.; Pearson: Hoboken, NJ, USA, 2006. [Google Scholar]
- Román-Raya, J.; Ruiz-García, I.; Escobedo, P.; Palma, A.J.; Guirado, D.; Carvajal, M.A. Light-Dependent Resistors as Dosimetric Sensors in Radiotherapy. Sensors 2020, 20, 1568. [Google Scholar] [CrossRef] [PubMed]
- Barahona, M.; Betancourt, D.; Ellinger, F.; Haase, K.; Schmidt, G.C.; Hübler, A.C. Automatic IR UWB chipless RFID system for short range applications. In Proceedings of the 2017 IEEE-APS Topical Conference on Antennas and Propagation in Wireless Communications (APWC), Verona, Italy, 11–15 September 2017; Volume 2017, pp. 274–279. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
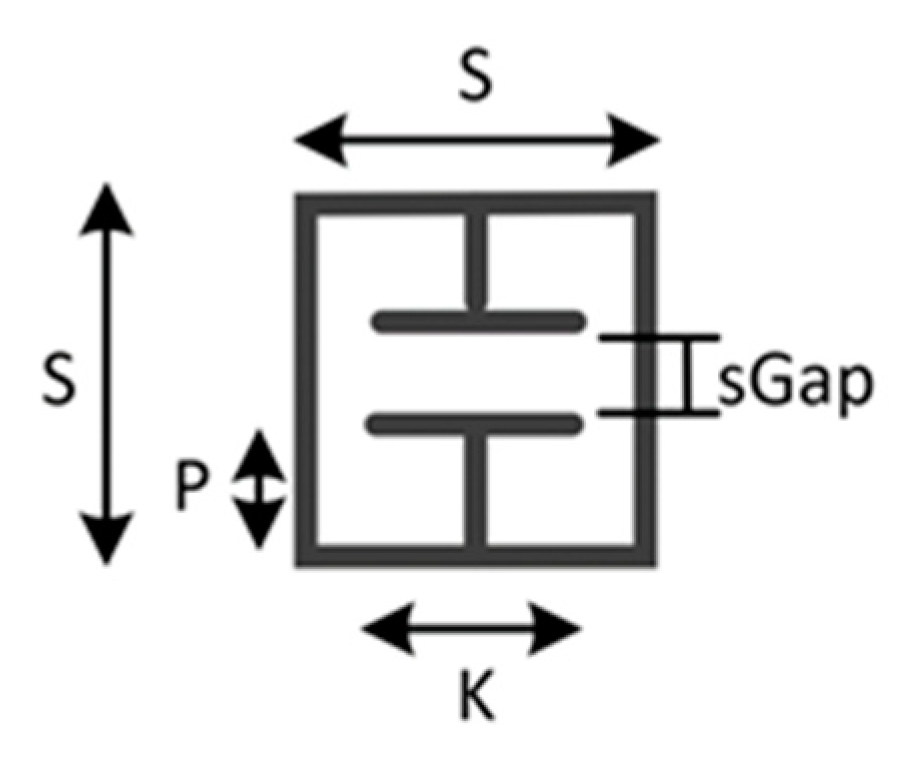
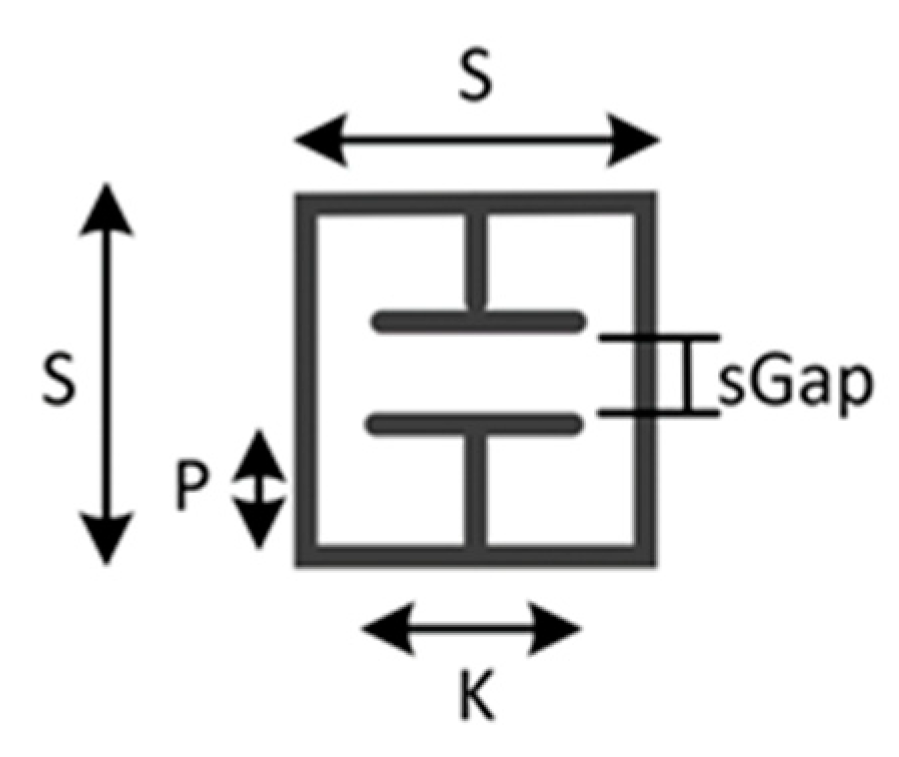
| Variable | Value [mm] | Variable | Value [mm] |
|---|---|---|---|
| S | 20 | Conductor Width | 1.5 |
| sGap | 2 | Substrate Length | 40 |
| P | 6 | Substrate Width | 27 |
| K | 10 | Substrate Thickness | 1.6 |
| Performance Characteristic | Details | Required Spectrum * | Required Resolution |
|---|---|---|---|
| Strain range of ±0.25% | This range was taken as it exceeds the elastic range for metals but is below that found with many carbon- and glass-reinforced composites (CFRP and GFRP) [1]. Sensitivity of initial V1 design was approximately 30 MHz/%ε | 15 MHz | Resolution/accuracy of at least 10 µε is required and the location of the null could be anywhere within the total strain sensor spectrum allocation. At a sensitivity of 30 MHz/%ε (3 kHz/µε), this resolution corresponds to 30 kHz. Assuming that the true minimum sits within ±0.5 steps of the dataset minimum, the strain sensor requires an average of 715 MHz (15 + 300 + 400), which means that the dataset will contain over 23,800 data points |
| Strain gauge operating temperature: −150 °C to +250 °C | This operating temperature range is not uncommon amongst some aerospace applications [3,4]. Some dielectrics can cause variations on the order of 0.5–1 MHz/°C [5] | 200–400 MHz | |
| Detect the total strain sensor resonant urve | Detecting the whole curve allows for robust checks to ensure a valid sensor response is present [6]. The total curve ranged from 300–500 MHz | 300–500 MHz | |
| Temperature sensor range of −150 °C to +250 °C | Previously presented sensor has sensitivity of 0.88 MHz/°C but some are on the order of 4 MHz/°C [7] | 352 MHz | The dataset frequency resolution ranges from 88 kHz (0.88 MHz/°C designs) to 400 kHz (4 MHz/°C designs). The dataset required for the sensor characterized in Figure 12 is approximately 4570 datapoints in size |
| Detection of the entire temperature resonance curve | The total curve found in the SIR circuits seen above was less than 50 MHz | 50 MHz | |
| Conclusion | With 715 MHz for the strain sensor and 402 MHz (average) for the temperature sensor, this leaves a total spectrum of 1117 MHz | A value of 30 kHz between datapoints is required for strain sensing and 88 kHz is required for temperature sensing. Minimum total number of datapoints should exceed 28,350 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mc Gee, K.; Anandarajah, P.; Collins, D. Use of Chipless RFID as a Passive, Printable Sensor Technology for Aerospace Strain and Temperature Monitoring. Sensors 2022, 22, 8681. https://doi.org/10.3390/s22228681
Mc Gee K, Anandarajah P, Collins D. Use of Chipless RFID as a Passive, Printable Sensor Technology for Aerospace Strain and Temperature Monitoring. Sensors. 2022; 22(22):8681. https://doi.org/10.3390/s22228681
Chicago/Turabian StyleMc Gee, Kevin, Prince Anandarajah, and David Collins. 2022. "Use of Chipless RFID as a Passive, Printable Sensor Technology for Aerospace Strain and Temperature Monitoring" Sensors 22, no. 22: 8681. https://doi.org/10.3390/s22228681
APA StyleMc Gee, K., Anandarajah, P., & Collins, D. (2022). Use of Chipless RFID as a Passive, Printable Sensor Technology for Aerospace Strain and Temperature Monitoring. Sensors, 22(22), 8681. https://doi.org/10.3390/s22228681