
Multiclass Level-Set Segmentation of Rust and Coating Damages in Images of Metal Structures

 ,
,  , , ,
, , , 
Abstract
1. Introduction
2. Materials and Methods
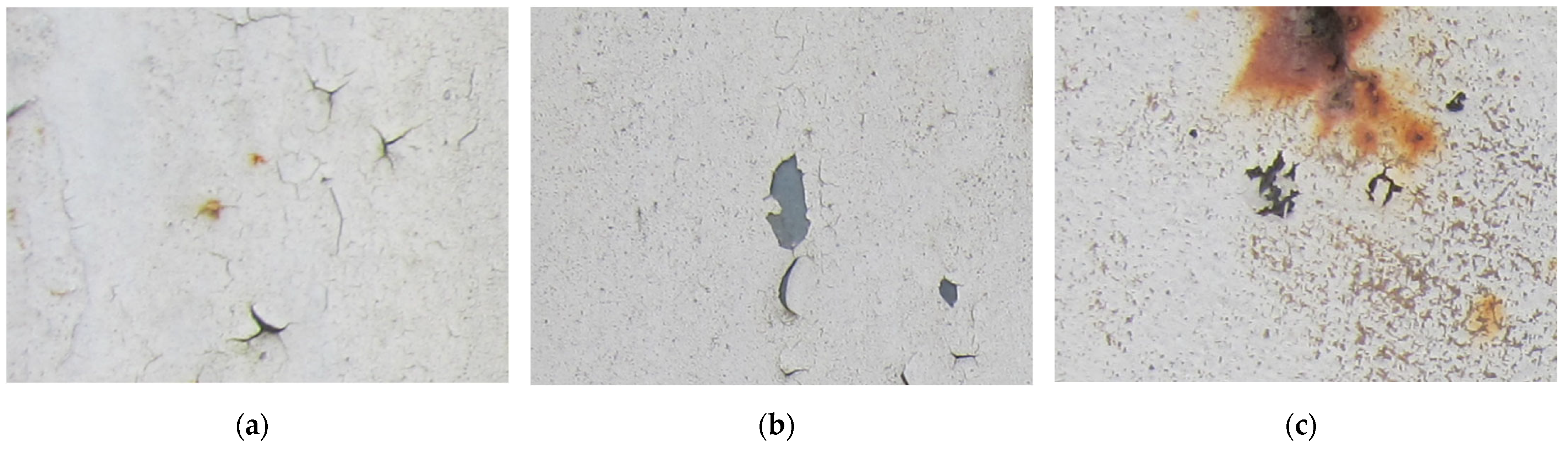
- (a)
- The SVM is trained in a supervised learning mode based on a previously labeled training set with ground truth data for rust, flacking, and background classification. SVM was chosen for its ability to build an optimal decision hyperplane that separates classes. In this work, we use a multiclass SVM with a one against all approach. It is used as a simple segmentation method only for three-class classification (background, rust, and flaking). These three classes are discriminated by multiclass SVM because their features do not overlap in RGB color space.
- (b)
- We used a different approach for the primal segmentation of paint cracks. The reason for that is that they do not have unique color features. As a result, paint cracks in RGB color space overlap with the other three classes making color features insufficient for classification. The characteristics that distinguish paint cracks are more of a geometric nature. We use a modified “valleys” detection method as a primal segmentation method for that purpose.
3. Results
3.1. Level-Set Method for Image Segmentation
3.2. Energy Terms for Defect Segmentation
3.3. Evaluation of the Performance of the Developed Method of Defect Segmentation
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Prapan, C.; Sukantarat, C.; Maneephrom, T. Painting for Aircraft. Proceedings 2019, 39, 21. [Google Scholar] [CrossRef]
- Mora, J.; García, P.; Muelas, R.; Agüero, A. Hard Quasicrystalline Coatings Deposited by HVOF Thermal Spray to Reduce Ice Accretion in Aero-Structures Components. Coatings 2020, 10, 290. [Google Scholar] [CrossRef]
- Pistone, A.; Scolaro, C.; Visco, A. Mechanical Properties of Protective Coatings against Marine Fouling: A Review. Polymers 2021, 13, 173. [Google Scholar] [CrossRef]
- Yan, X.; Zhao, W.; Wang, L. Preparation and Performance of Thermochromic and Self-Repairing Dual Function Paint Film with Lac Resin Microcapsules and Fluorane Microcapsules. Polymers 2021, 13, 3109. [Google Scholar] [CrossRef]
- Gadwal, I. A Brief Overview on Preparation of Self-Healing Polymers and Coatings via Hydrogen Bonding Interactions. Macromol 2021, 1, 18–36. [Google Scholar] [CrossRef]
- Bembenek, M. The influence of the use of polymer lining within the roller press gravity feeder on briquette quality. Polymers 2020, 12, 2489. [Google Scholar] [CrossRef]
- Czekajło, M.; Zakowski, K.; Krakowiak, S.; Kierepa, S. Analysis of the Possibility of Using New Types of Protective Coatings and Abrasion-Resistant Linings under the Operating Conditions of the Spiral Classifier at KGHM Polska Miedź S.A. Ore Concentration Plant. Coatings 2021, 11, 1138. [Google Scholar] [CrossRef]
- Budnik, A.; Berladir, K.; Sviderskiy, V.; Budnik, O.; Rudenko, P.; Ilinyh, A. Physical and chemical aspects of mechanical activation of polytetrafluoroethylene composite in obtaining and recycling. East. Eur. J. Enterp. Technol. 2014, 2, 9–15. [Google Scholar] [CrossRef]
- Pokhmurs’kyi, V.I.; Zin, I.M.; Tymus, M.B.; Kornii, S.A.; Karpenko, O.V.; Khlopyk, O.P.; Korets’ka, N.I. Inhibition of the Corrosion of Carbon Steel by Xanthan Biopolymer. Mater. Sci. 2020, 55, 522–528. [Google Scholar] [CrossRef]
- Bembenek, M.; Popadyuk, O.; Shihab, T.; Ropyak, L.; Uhryński, A.; Vytvytskyi, V.; Bulbuk, O. Optimization of Technological Parameters of the Process of Forming Therapeutic Biopolymer Nanofilled Films. Nanomaterials 2022, 12, 2413. [Google Scholar] [CrossRef]
- Claucherty, S.; Sakaue, H. Phenol-Formaldehyde Resin for Optical-Chemical Temperature Sensing. Sensors 2018, 18, 1756. [Google Scholar] [CrossRef]
- Król, D.; Motyl, P.; Piotrowska-Woroniak, J.; Patej, M.; Poskrobko, S. Heat Reflective Thin-Film Polymer Insulation with Polymer Nanospheres—Determination of Thermal Conductivity Coefficient. Energies 2022, 15, 6286. [Google Scholar] [CrossRef]
- Matsuda, Y.; Orimo, R.; Abe, Y.; Hiraiwa, Y.; Okamura, Y.; Sunami, Y. Pressure-Sensitive Nano-Sheet for Optical Pressure Measurement. Sensors 2021, 21, 7168. [Google Scholar] [CrossRef]
- Tamburrano, A.; Proietti, A.; Fortunato, M.; Pesce, N.; Sarto, M.S. Exploring the Capabilities of a Piezoresistive Graphene-Loaded Waterborne Paint for Discrete Strain and Spatial Sensing. Sensors 2022, 22, 4241. [Google Scholar] [CrossRef]
- Saakiyan, L.S.; Efremov, A.P.; Ropyak, L.Y.; Gorbatskii, A.V. A method of microelectrochemical investigations. Sov. Mater. Sci. 1987, 23, 267–269. [Google Scholar] [CrossRef]
- Saakiyan, L.S.; Efremov, A.P.; Ropyak, L.Y. Effect of stress on the microelectrochemical heterogeneity of steel. Prot. Met. 1989, 25, 185–189. [Google Scholar]
- Bejinariu, C.; Burduhos-Nergis, D.-P.; Cimpoesu, N. Immersion Behavior of Carbon Steel, Phosphate Carbon Steel and Phosphate and Painted Carbon Steel in Saltwater. Materials 2021, 14, 188. [Google Scholar] [CrossRef]
- Vynar, V.A.; Pokhmurs’kyi, V.I.; Zin, I.M.; Vasyliv, K.B.; Khlopyk, O.P. Determination of the Mechanism of Tribocorrosion of D16T Alloy According to the Electrode Potential. Mater. Sci. 2018, 53, 717–723. [Google Scholar] [CrossRef]
- Ivasenko, I.; Posuvailo, V.; Veselivska, H.; Vynar, V. Porosity Segmentation and Analysis of Oxide Ceramic Coatings of D16T Alloy. In Proceedings of the 2020 IEEE 15th International Conference on Computer Sciences and Information Technologies (CSIT), Zbarazh, Ukraine, 23–26 September 2020; Volume 2, pp. 50–53. [Google Scholar] [CrossRef]
- Lutsak, D.; Prysyazhnyuk, P.; Burda, M.; Aulin, V. Development of a method and an apparatus for tribotechnical tests of materials under loose abrasive friction. East. Eur. J. Enterp. Technol. 2016, 5, 19–26. [Google Scholar] [CrossRef]
- Bembenek, M.; Buczak, M. The Fine-Grained Material Flow Visualization of the Saddle-Shape Briquetting in the Roller Press Using Computer Image Analysis. J. Flow Vis. Image Process. 2021, 28, 69–78. [Google Scholar] [CrossRef]
- Pawlik, J.; Wróblewska-Pawlik, A.; Bembenek, M. The Volumetric Wear Assessment of a Mining Conical Pick Using the Photogrammetric Approach. Materials 2022, 15, 5783. [Google Scholar] [CrossRef]
- Ropyak, L.Y.; Velychkovych, A.S.; Vytvytskyi, V.S.; Shovkoplias, M.V. Analytical study of “crosshead—Slide rail” wear effect on pump rod stress state. J. Phys. Conf. Ser. 2021, 1741, 12039. [Google Scholar] [CrossRef]
- Forcellese, A.; Mancia, T.; Simoncini, M. Tensile Behavior and Formability of Pre-Painted Steel Sheets. Metals 2020, 10, 53. [Google Scholar] [CrossRef]
- Tatsii, R.M.; Pazen, O.Y.; Vovk, S.Y. Modeling of the heat transfer process taking into account bursting expansion of fire-retardant coating. Visn. Natsionalnoho Hirnychoho Universytetu 2020, 2020, 36–40. [Google Scholar] [CrossRef]
- Piperopoulos, E.; Grifò, G.; Scionti, G.; Atria, M.; Calabrese, L.; Consolo, G.; Proverbio, E. Study of Intumescent Coatings Growth for Fire Retardant Systems in Naval Applications: Experimental Test and Mathematical Model. Coatings 2022, 12, 1180. [Google Scholar] [CrossRef]
- Shatskyi, I.P.; Ropyak, L.Y.; Makoviichuk, M.V. Strength optimization of a two-layer coating for the particular local loading conditions. Strength Mater. 2016, 48, 726–730. [Google Scholar] [CrossRef]
- Ropyak, L.Y.; Shatskyi, I.P.; Makoviichuk, M.V. Analysis of interaction of thin coating with an abrasive using one-dimensional model. Metallofiz. Noveishie Tekhnol. 2019, 41, 647–654. [Google Scholar] [CrossRef]
- Ropyak, L.Y.; Makoviichuk, M.V.; Shatskyi, I.P.; Pritula, I.M.; Gryn, L.O.; Belyakovskyi, V.O. Stressed state of laminated interference-absorption filter under local loading. Funct. Mater. 2020, 27, 638–642. [Google Scholar] [CrossRef]
- Shatskii, I.P. Tension of a plate containing a rectilinear cut with hinged rims. J. Appl. Mech. Tech. Phys. 1989, 30, 828–830. [Google Scholar] [CrossRef]
- Shatskyi, I.P.; Makoviichuk, M.V.; Shcherbii, A.B. Influence of flexible coating on the limit equilibrium of a spherical shell with meridional crack. Mater. Sci. 2020, 55, 484–491. [Google Scholar] [CrossRef]
- Dutkiewicz, M.; Dalyak, T.; Shatskyi, I.; Venhrynyuk, T.; Velychkovych, A. Stress Analysis in Damaged Pipeline with Composite Coating. Appl. Sci. 2021, 11, 10676. [Google Scholar] [CrossRef]
- Nassar, M.; Mohamed, S.; Matbuly, M.; Bichir, S. Analytical Solution of Cracked Shell Resting on Elastic Foundation. Acta Mech. Solida Sin. 1996, 9, 306–319. [Google Scholar]
- Shats’kyi, I.P.; Makoviichuk, M.V. Contact interaction of the crack edges in the case of bending of a plate with elastic support. Mater. Sci. 2003, 39, 371–376. [Google Scholar] [CrossRef]
- Sylovanyuk, V.P.; Yukhim, R.Y. Material strengthening by crack and cavity healing. Strength Mater. 2011, 43, 33–41. [Google Scholar] [CrossRef]
- Shatskyi, I.; Kurtash, I. Strength of plate with the filled crack under multiparameter loading. Procedia Struct. Integr. 2018, 13, 1482–1487. [Google Scholar] [CrossRef]
- Panasyuk, V.V.; Sylovanyuk, V.P.; Marukha, V.I. Injection Technologies for the Repair of Damaged Concrete Structures; Springer: Dordrecht, The Netherlands, 2014. [Google Scholar] [CrossRef]
- Shats’kyi, I.P. Limiting equilibrium of a plate with partially healed crack. Mater. Sci. 2015, 51, 322–330. [Google Scholar] [CrossRef]
- Shatskyi, I.P.; Perepichka, V.V.; Ropyak, L.Y. On the influence of facing on strength of solids with surface defects. Metallofiz. Noveishie Tekhnol. 2020, 42, 69–76. [Google Scholar] [CrossRef]
- Kusyi, Y.M.; Kuk, A.M. Investigation of the technological damageability of castings at the stage of design and technological preparation of the machine Life Cycle. J. Phys. Conf. Ser. 2020, 1426, 012034. [Google Scholar] [CrossRef]
- Kopei, V.B.; Onysko, O.R.; Panchuk, V.G. Principles of development of product lifecycle management system for threaded connections based on the Python programming language. J. Phys. Conf. Ser. 2020, 1426, 012033. [Google Scholar] [CrossRef]
- Kusyi, Y.; Onysko, O.; Kuk, A.; Solohub, B.; Kopei, V. Development of the Technique for Designing Rational Routes of the Functional Surfaces Processing of Products; Lecture Notes in Networks and Systems; Springer: Berlin/Heidelberg, Germany, 2022; Volume 472, pp. 135–143. [Google Scholar] [CrossRef]
- Sfameni, S.; Rando, G.; Marchetta, A.; Scolaro, C.; Cappello, S.; Urzì, C.; Visco, A.; Plutino, M.R. Development of Eco-Friendly Hydrophobic and Fouling-Release Coatings for Blue-Growth Environmental Applications: Synthesis, Mechanical Characterization and Biological Activity. Gels 2022, 8, 528. [Google Scholar] [CrossRef] [PubMed]
- Kim, J.-H.; Hossain, S.M.; Kang, H.-J.; Park, H.; Tijing, L.; Park, G.W.; Suzuki, N.; Fujishima, A.; Jun, Y.-S.; Shon, H.K.; et al. Hydrophilic/Hydrophobic Silane Grafting on TiO2 Nanoparticles: Photocatalytic Paint for Atmospheric Cleaning. Catalysts 2021, 11, 193. [Google Scholar] [CrossRef]
- Steinerová, D.; Kalendová, A.; Machotová, J.; Pejchalová, M. Environmentally Friendly Water-Based Self-Crosslinking Acrylate Dispersion Containing Magnesium Nanoparticles and Their Films Exhibiting Antimicrobial Properties. Coatings 2020, 10, 340. [Google Scholar] [CrossRef]
- Lee, S.; Chang, L.-M. Digital image processing methods for assessing bridge painting rust defects and their limitations. In Proceedings of the 2005 ASCE International Conference on Computing in Civil Engineering, Cancun, Mexico, 12–15 July 2005; pp. 1–12. [Google Scholar] [CrossRef]
- Gibbons, T.; Pierce, G.; Worden, K.; Antoniadou, I. A Gaussian mixture model for automated corrosion detection in remanufacturing. In Advances in Manufacturing Technology XXXII, Proceedings of the 16th International Conference on Manufacturing Research ICMR 2018, Skövde, Sweden, 11–13 September 2018; Thorvald, P., Case, K., Eds.; IOS Press: Skövde, Sweden, 2018; Volume 8, pp. 63–68. [Google Scholar] [CrossRef]
- Boykov, Y.; Jolly, M.-P. Interactive graph cuts for optimal boundary and region segmentation of objects in n-d images. In Proceedings of the Eighth IEEE International Conference on Computer Vision ICCV 2001, Vancouver, BC, Canada, 7–14 July 2001; Volume 1, pp. 105–112. [Google Scholar] [CrossRef]
- Guan, J.; Li, S.; He, X.; Chen, J. Peak-Graph-Based Fast Density Peak Clustering for Image Segmentation. IEEE Signal Process. Lett. 2021, 28, 897–901. [Google Scholar] [CrossRef]
- Shen, H.-K.; Chen, P.-H.; Chang, L.-M. Human-visual-perception-like intensity recognition for color rust images based on artificial neural network. Autom. Constr. 2018, 90, 178–187. [Google Scholar] [CrossRef]
- Han, Q.; Zhao, N.; Xu, J. Recognition and location of steel structure surface corrosion based on unmanned aerial vehicle images. J. Civ. Struct. Health Monit. 2021, 11, 1375–1392. [Google Scholar] [CrossRef]
- Lian, J.; Yang, Z.; Liu, J.; Sun, W.; Zheng, L.; Du, X.; Yi, Z.; Shi, B.; Ma, Y. An Overview of Image Segmentation Based on Pulse-Coupled Neural Network. Arch. Comput. Methods Eng. 2021, 28, 387–403. [Google Scholar] [CrossRef]
- Ohri, K.; Kumar, V. Review on self-supervised image recognition using deep neural networks. Knowl. Based Syst. 2021, 224, 107090. [Google Scholar] [CrossRef]
- Chen, P.H.; Shen, H.K.; Lei, C.Y.; Chang, L.M. Support-vector-machine-based method for automated steel bridge rust assessment. Autom. Constr. 2012, 23, 9–19. [Google Scholar] [CrossRef]
- Chandra, M.A.; Bedi, S.S. Survey on SVM and their application in image classification. Int. J. Inf. Technol. 2021, 13, 1–11. [Google Scholar] [CrossRef]
- Yang, A.; Bai, Y.; Liu, H.; Jin, K.; Xue, T.; Ma, W. Application of SVM and its Improved Model in Image Segmentation. Mob. Netw. Appl. 2022, 27, 851–861. [Google Scholar] [CrossRef]
- De Kerf, T.; Hasheminejad, N.; Blom, J.; Vanlanduit, S. Qualitative Comparison of 2D and 3D Atmospheric Corrosion Detection Methods. Materials 2021, 14, 3621. [Google Scholar] [CrossRef] [PubMed]
- Wang, Z.; Ma, B.; Zhu, Y. Review of Level Set in Image Segmentation. Arch. Comput. Methods Eng. 2021, 28, 2429–2446. [Google Scholar] [CrossRef]
- Bourouis, S.; Channoufi, I.; Alroobaea, R.; Rubaiee, S.; Andejany, M.; Bouguila, N. Color object segmentation and tracking using flexible statistical model and level-set. Multimed. Tools Appl. 2021, 80, 5809–5831. [Google Scholar] [CrossRef]
- Xia, D.; Song, S.; Tao, L.; Qin, Z.; Wu, Z.; Gao, Z.; Wang, J.; Hu, W.; Behnamian, Y.; Luo, J. Review-material degradation assessed by digital image processing: Fundamentals, progresses, and challenges. J. Mater. Sci. Technol. 2020, 53, 146–162. [Google Scholar] [CrossRef]
- Jardim, S.; António, J.; Mora, C. Graphical Image Region Extraction with K-Means Clustering and Watershed. J. Imaging 2022, 8, 163. [Google Scholar] [CrossRef] [PubMed]
- Oskouei, A.G.; Hashemzadeh, M. CGFFCM: A color image segmentation method based on cluster-weight and feature-weight learning. Softw. Impacts 2022, 11, 100228. [Google Scholar] [CrossRef]
- Katsamenis, I.; Doulamis, N.; Doulamis, A.; Protopapadakis, E.; Voulodimos, A. Simultaneous Precise Localization and Classification of metal rust defects for robotic-driven maintenance and prefabrication using residual attention U-Net. Autom. Constr. 2022, 137, 104182. [Google Scholar] [CrossRef]
- Khayatazad, M.; De Pue, L.; De Waele, W. Detection of corrosion on steel structures using automated image processing. Dev. Built Environ. 2020, 3, 100022. [Google Scholar] [CrossRef]
- Zhang, J.; Williams, B.M.; Lawman, S.; Atkinson, D.; Zhang, Z.; Shen, Y.; Zheng, Y. Non-destructive analysis of flake properties in automotive paints with full-field optical coherence tomography and 3D segmentation. Opt. Express 2017, 25, 18614–18628. [Google Scholar] [CrossRef]
- Rezaie, A.; Achanta, R.; Godio, M.; Beyer, K. Comparison of crack segmentation using digital image correlation measurements and deep learning. Constr. Build. Mater. 2020, 261, 120474. [Google Scholar] [CrossRef]
- Abas, F.; Martinez, K. Classification of painting cracks for content-based analysis. In Machine Vision Applications in Industrial Inspection XI, Proceedings of SPIE Electronic Imaging 2003, Santa Clara, CA, USA, 20–24 January 2003; Hunt, M.A., Price, J.R., Eds.; SPIE Digital Library: Bellingham, WA, USA, 2003; Volume 5011, p. 5011. [Google Scholar] [CrossRef]
- Jahanshahi, M.; Masri, S. A Novel Crack Detection Approach for Condition Assessment of Structures. In Proceedings of the ASCE International Workshop on Computing in Civil Engineering, Miami, FL, USA, 19–22 June 2011; pp. 388–395. [Google Scholar] [CrossRef]
- Pang, J.; Zhang, H.; Zhao, H.; Li, L. DcsNet: A real-time deep network for crack segmentation. Signal Image Video Process. 2022, 16, 911–919. [Google Scholar] [CrossRef]
- Vorobel, R.; Ivasenko, I.; Berehulyak, O.; Mandzii, T. Segmentation of rust defects on painted steel surfaces by intelligent image analysis. Autom. Constr. 2021, 123, 103515. [Google Scholar] [CrossRef]
- Ivasenko, I.; Chervatyuk, V. Detection of rust defects of protective coatings based on HSV color model. In Proceedings of the 2nd Ukraine Conference on Electrical and Computer Engineering, UKRCON 2019, Lviv, Ukraine, 2–6 July 2019; pp. 1143–1146. [Google Scholar]
- Vorobel, R.; Ivasenko, I.; Berehulyak, O. Automatized computer system for evaluation of rust using modified single-scale retinex. In Proceedings of the 1st Ukraine Conference on Electrical and Computer Engineering, UKRCON 2017, Kyiv, Ukraine, 29 May–2 June 2017; pp. 1002–1006. [Google Scholar] [CrossRef]
- Mandziy, T.; Ivasenko, I.; Berehulyak, O.; Vorobel, R. Influence of Colour Restoration on Rust Image Segmentation. In Proceedings of the 3rd Ukraine Conference on Electrical and Computer Engineering, UKRCON 2021, Lviv, Ukraine, 6–8 July 2021; pp. 68–73. [Google Scholar] [CrossRef]
- Berehulyak, O.; Vorobel, R.; Mandzii, T.; Ivasenko, I. Segmentation of Partially Shadowed Rust Images. In Proceedings of the IEEE 16th International Conference on Advanced Trends in Radioelectronics, Telecommunications and Computer Engineering TCSET 2022, Lviv-Slavske, Ukraine, 22–26 February 2022; pp. 564–568. [Google Scholar] [CrossRef]
- Berehulyak, O.; Vorobel, R. The algebraic model with an asymmetric characteristic of logarithmic transformation. In Proceedings of the IEEE 15th International Scientific and Technical Conference on Computer Sciences and Information Technologies, CSIT 2020, Zbarazh, Ukraine, 23–26 September 2020; Volume 2, pp. 119–122. [Google Scholar] [CrossRef]
- Vorobel, R.A. Logarithmic Image Processing; Naukova Dumka: Kyiv, Ukraine, 2012; p. 232. [Google Scholar]
- Mandziy, T. Inhomogeneity inforced piecewise smooth Chan-Vese model for image segmentation. In Proceedings of the IEEE 2nd Ukraine Conference on Electrical and Computer Engineering, UKRCON 2019, Lviv, Ukraine, 2–6 July 2019; pp. 1158–1161. [Google Scholar] [CrossRef]
- Mandziy, T. Chan-Vese Model for Rust Image Segmentation. In Proceedings of the IEEE 15th International Scientific and Technical Conference on Computer Sciences and Information Technologies, CSIT 2020, Zbarazh, Ukraine, 23–26 September 2020; Volume 2, pp. 115–118. [Google Scholar] [CrossRef]
- Mumford, D.; Shah, J. Optimal approximations by piecewise smooth functions and associated variational problems. Commun. Pure Appl. Math. 1989, 42, 577–685. [Google Scholar] [CrossRef]
- Chan, T.; Vese, L. Active contours without edges. IEEE Trans. Image Process. 2001, 10, 266–277. [Google Scholar] [CrossRef] [PubMed]
- Vese, L.; Chan, T. A multiphase level set framework for image segmentation using the Mumford and Shah model. Int. J. Comput. Vis. 2002, 50, 271–293. [Google Scholar] [CrossRef]
- Li, C.; Kao, C.; Gore, J.C.; Ding, Z. Implicit Active Contours Driven by Local Binary Fitting Energy. In Proceedings of the 2007 IEEE Conference on Computer Vision and Pattern Recognition, Minneapolis, MN, USA, 17–22 June 2007; pp. 1–7. [Google Scholar] [CrossRef]
- Lankton, S.; Nain, D.; Yezzi, A.; Tannenbaun, A. Hybrid geodesic region-based curve evolutions for image segmentation. In Proceedings of the SPIE Medical Imaging 2007: Physics of Medical Imaging, San Diego, CA, USA, 17–22 February 2007; Volume 6510. [Google Scholar] [CrossRef]
- Li, C.; Kao, C.; Gore, J.C.; Ding, Z. Minimization of Region-Scalable Fitting Energy for Image Segmentation. IEEE Trans. Image Process. 2008, 17, 1940–1949. [Google Scholar] [CrossRef] [PubMed]
- Caselles, V.; Kimmel, R.; Sapiro, G. Geodesic active contours. Int. J. Comput. Vis. 1997, 22, 61–79. [Google Scholar] [CrossRef]
- Chan, T.F.; Sandberg, Y.B.; Vese, L.A. Active contours without edges for Vector-valued Image. J. Vis. Commun. Image Represent. 2000, 11, 130–141. [Google Scholar] [CrossRef]
- Tsai, A.; Yezzi, A.; Willsky, A.S. Curve evolution implementation of the Mumford-Shah functional for image segmentation, denoising, interpolation, and magnification. IEEE Trans. Image Process. 2001, 10, 1169–1186. [Google Scholar] [CrossRef]
- Li, C.; Huang, R.; Ding, Z.; Gatenby, C.; Metaxas, D.N.; Gore, J.C. A Level Set Method for Image Segmentation in the Presence of Intensity Inhomogene ities with Applicatio n to MRI. IEEE Trans. Image Process. 2011, 20, 2007–2016. [Google Scholar] [CrossRef]
- Piovano, J.; Rousson, M.; Papadopoulo, T. Efficient Segmentation of Piecewise Smooth Images. In Scale Space and Variational Methods in Computer Vision; SSVM 2007; Lecture Notes in Computer Science; Sgallari, F., Murli, A., Paragios, N., Eds.; Springer: Berlin/Heidelberg, Germany, 2007; Volume 4485. [Google Scholar] [CrossRef]
- Li, C.; Xu, C.; Gui, C.; Fox, M.D. Distance regularized level set evolution and its application to image segmentation. IEEE Trans. Image Process. 2010, 19, 3243–3254. [Google Scholar] [CrossRef] [PubMed]
- Wang, L.; He, L.; Mishra, A.; Li, C. Active Contours Driven by Local Gaussian Distribution Fitting Energy. Signal Process. 2009, 89, 2435–2447. [Google Scholar] [CrossRef]
- Lu, Z.; Carneiro, G.; Bradley, A. An improved joint optimization of multiple level set functions for the segmentation of overlapping cervical cells. IEEE Trans. Image Process. 2015, 24, 1261–1272. [Google Scholar]
- Lindeberg, T. Edge detection and ridge detection with automatic scale selection. Int. J. Comput. Vis. 1998, 30, 117–154. [Google Scholar] [CrossRef]
- Bandura, A.; Skaskiv, O. Analytic functions in the unit ball of bounded L-index in joint variables and of bounded L-index in direction: A connection between these classes. Demonstr. Math. 2019, 52, 82–87. [Google Scholar] [CrossRef]
- Bandura, A.; Skaskiv, O. Entire functions of bounded L-index: Its zeros and behavior of partial logarithmic derivatives. J. Complex Anal. 2017, 2017, 3253095. [Google Scholar] [CrossRef]
- Bandura, A.; Skaskiv, O. Slice holomorphic functions in several variables with bounded L-index in direction. Axioms 2019, 8, 88. [Google Scholar] [CrossRef]
- Duy, L.D.; Anh, N.T.; Son, N.T.; Tung, N.V.; Duong, N.B.; Khan, M.H.R. Deep Learning in Semantic Segmentation of Rust in Images. In Proceedings of the 9th International Conference on Software and Computer Applications ICSCA 2020, Langkawi, Malaysia, 18–21 February 2020; pp. 129–132. [Google Scholar] [CrossRef]
- Protsenko, V.S.; Bobrova, L.S.; Baskevich, A.S.; Korniy, S.A.; Danilov, F.I. Electrodeposition of chromium coatings from a choline chloride based ionic liquid with the addition of water. J. Chem. Technol. Metall. 2018, 53, 906–915. [Google Scholar]
- Bazaluk, O.; Dubei, O.; Ropyak, L.; Shovkoplias, M.; Pryhorovska, T.; Lozynskyi, V. Strategy of compatible use of jet and plunger pump with chrome parts in oil well. Energies 2022, 15, 83. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
| Value | Rust | Background Paint | Flaking | Cracking | Overall |
|---|---|---|---|---|---|
| Error (%) | 1.31 | 3.24 | 7.82 | 6.49 | 9.43 |
| AUC (%) | 94.49 | 97.19 | 99.70 | 89.54 | – |
| Type of Paint Coating Damage on Steel | Input Images | Ground Truth Segmentation | Segmentation by the Proposed Approach |
|---|---|---|---|
| Cracking of paint coating |  |  |  |
| Rust |  |  |  |
| Flacking of paint coating, cracking, and rust |  |  |  |
| Cracking of paint coating |  |  |  |
| Cracking of paint coating and rust |  |  |  |
| Type of Paint Coating Damage on Steel | Input Images | Segmentation Results by the Proposed Model |
|---|---|---|
| Cracking of paint coating and rust |  |  |
| Rust damage |  |  |
| Cracking of paint coating and rust |  |  |
| Cracking of paint coating and rust |  |  |
| Flacking and cracking of paint coating |  |  |
| Input Image | Valley Filter Response | T = 128 | T = 155 | T = 165 |
|---|---|---|---|---|
 |  |  |  |  |
| Input Image | Valley Detection Result | SVM Segmentation Result | Segmentation Result by the Proposed Method | Ground Truth |
|---|---|---|---|---|
 |  |  |  |  |
| r = 5 | r = 11 | r = 15 | r = 21 | r = 31 |
|---|---|---|---|---|
 |  |  |  |  |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bembenek, M.; Mandziy, T.; Ivasenko, I.; Berehulyak, O.; Vorobel, R.; Slobodyan, Z.; Ropyak, L. Multiclass Level-Set Segmentation of Rust and Coating Damages in Images of Metal Structures. Sensors 2022, 22, 7600. https://doi.org/10.3390/s22197600
Bembenek M, Mandziy T, Ivasenko I, Berehulyak O, Vorobel R, Slobodyan Z, Ropyak L. Multiclass Level-Set Segmentation of Rust and Coating Damages in Images of Metal Structures. Sensors. 2022; 22(19):7600. https://doi.org/10.3390/s22197600
Chicago/Turabian StyleBembenek, Michał, Teodor Mandziy, Iryna Ivasenko, Olena Berehulyak, Roman Vorobel, Zvenomyra Slobodyan, and Liubomyr Ropyak. 2022. "Multiclass Level-Set Segmentation of Rust and Coating Damages in Images of Metal Structures" Sensors 22, no. 19: 7600. https://doi.org/10.3390/s22197600
APA StyleBembenek, M., Mandziy, T., Ivasenko, I., Berehulyak, O., Vorobel, R., Slobodyan, Z., & Ropyak, L. (2022). Multiclass Level-Set Segmentation of Rust and Coating Damages in Images of Metal Structures. Sensors, 22(19), 7600. https://doi.org/10.3390/s22197600