
Application of YOLOv4 Algorithm for Foreign Object Detection on a Belt Conveyor in a Low-Illumination Environment


Abstract
:1. Introduction
2. Principle of KinD++ Based Low-Light Image Enhancement Algorithm
2.1. Layer Decomposition Network
2.2. Light-Adjusted Network
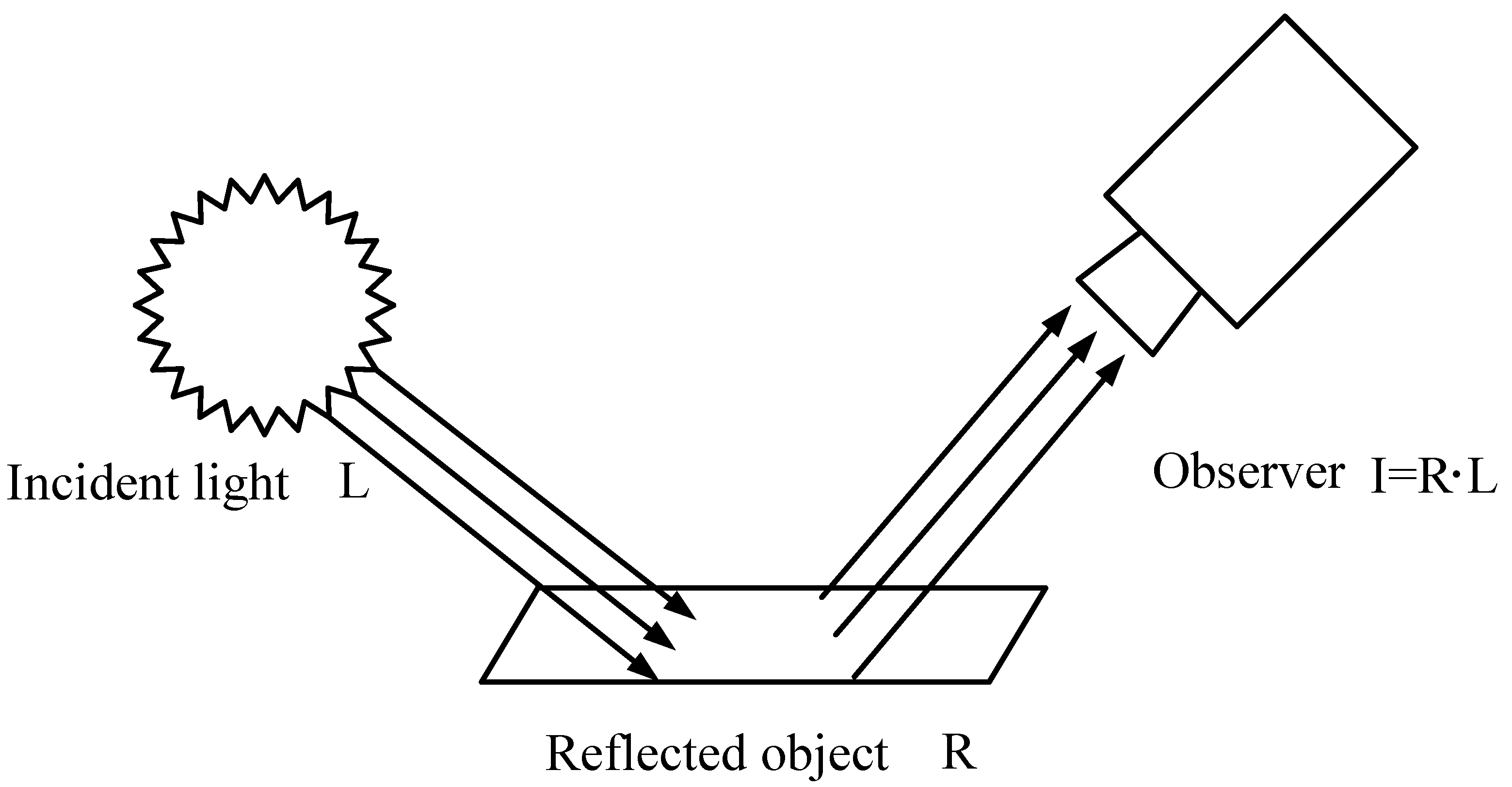
2.3. Reflectivity Recovery Network
3. Data Augmentation and Anchor Box Optimization
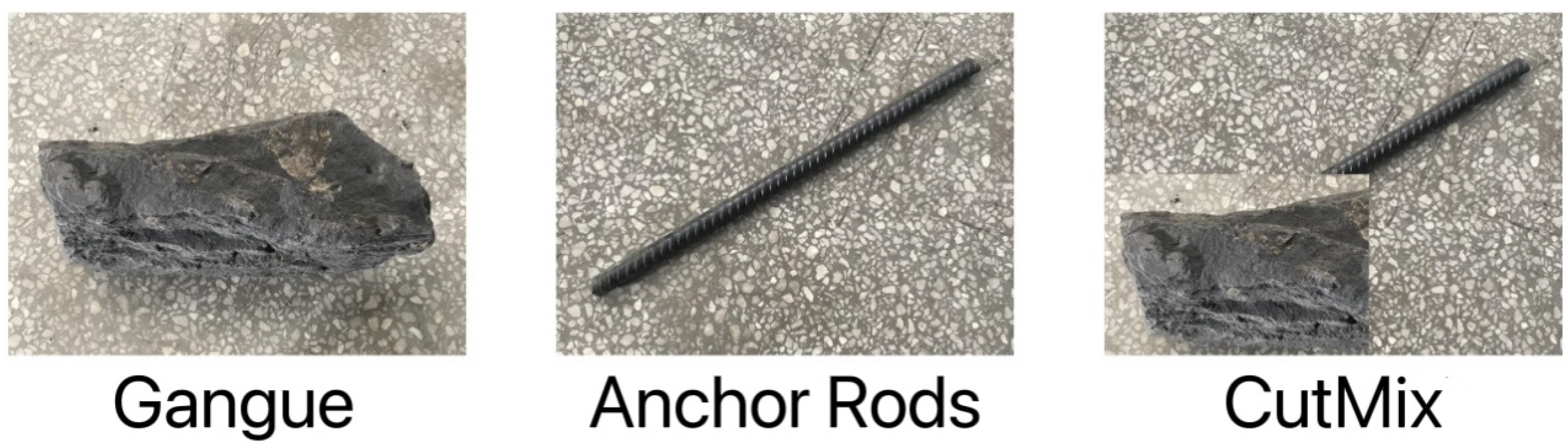
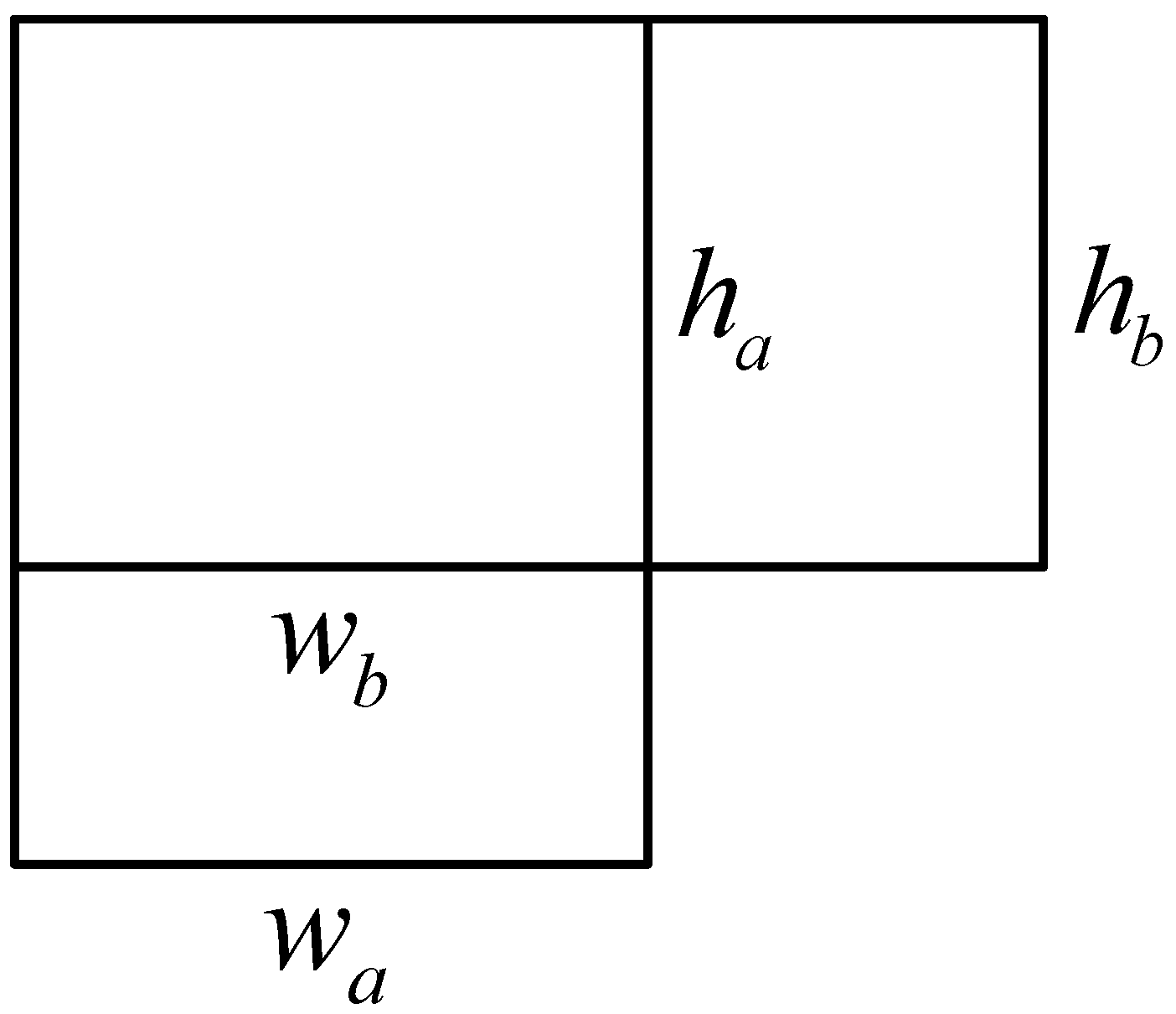
3.1. Data Augmentation
3.2. Anchor Box Optimization
4. Experiments and Analysis
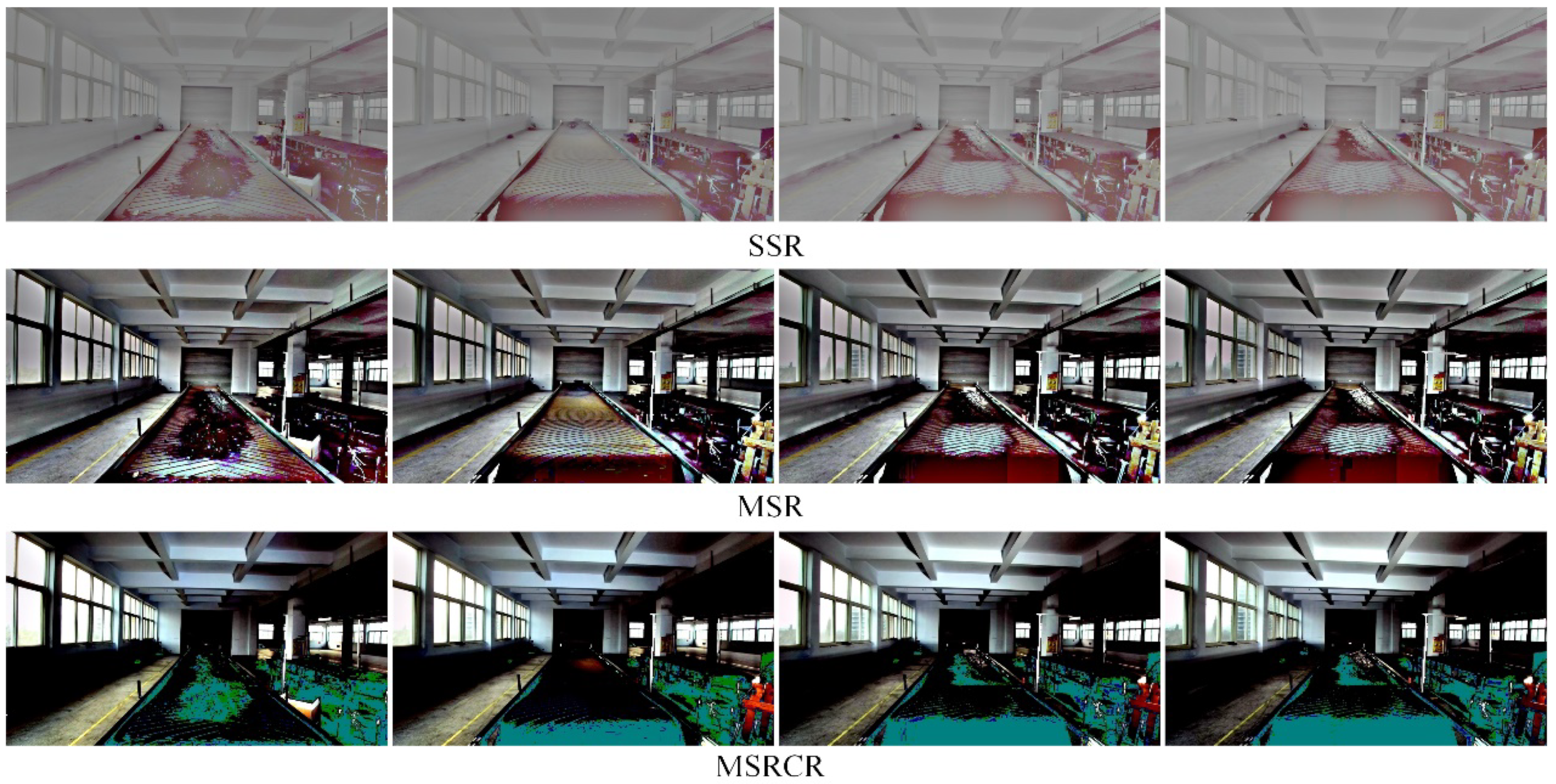
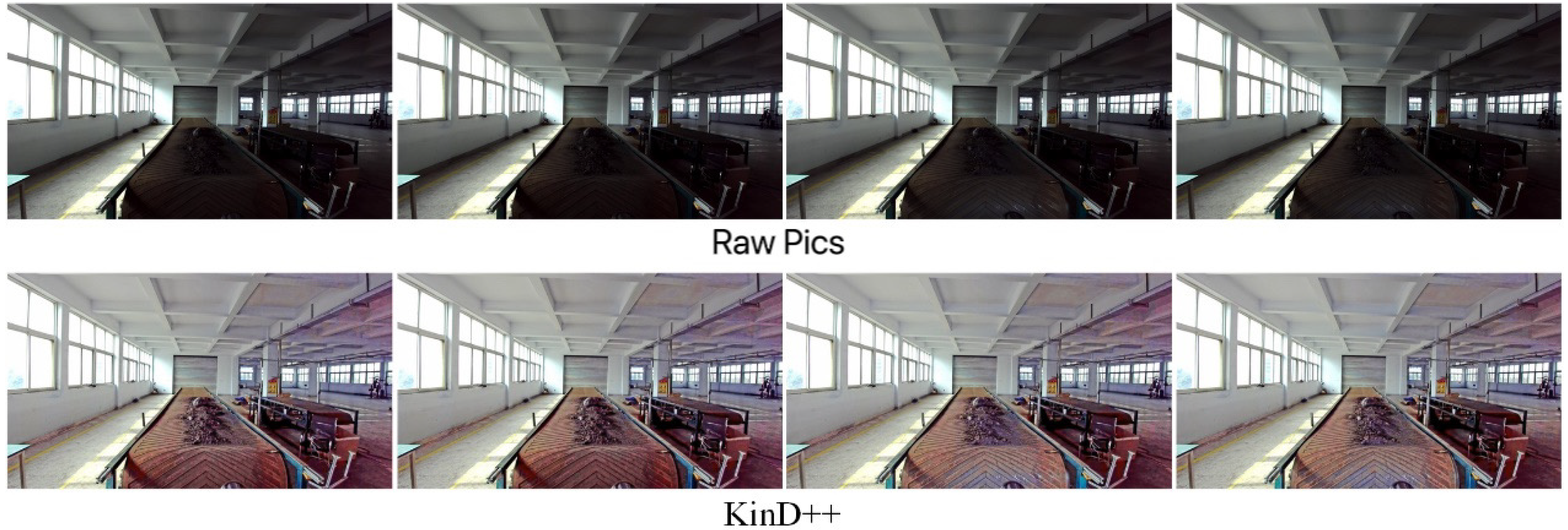
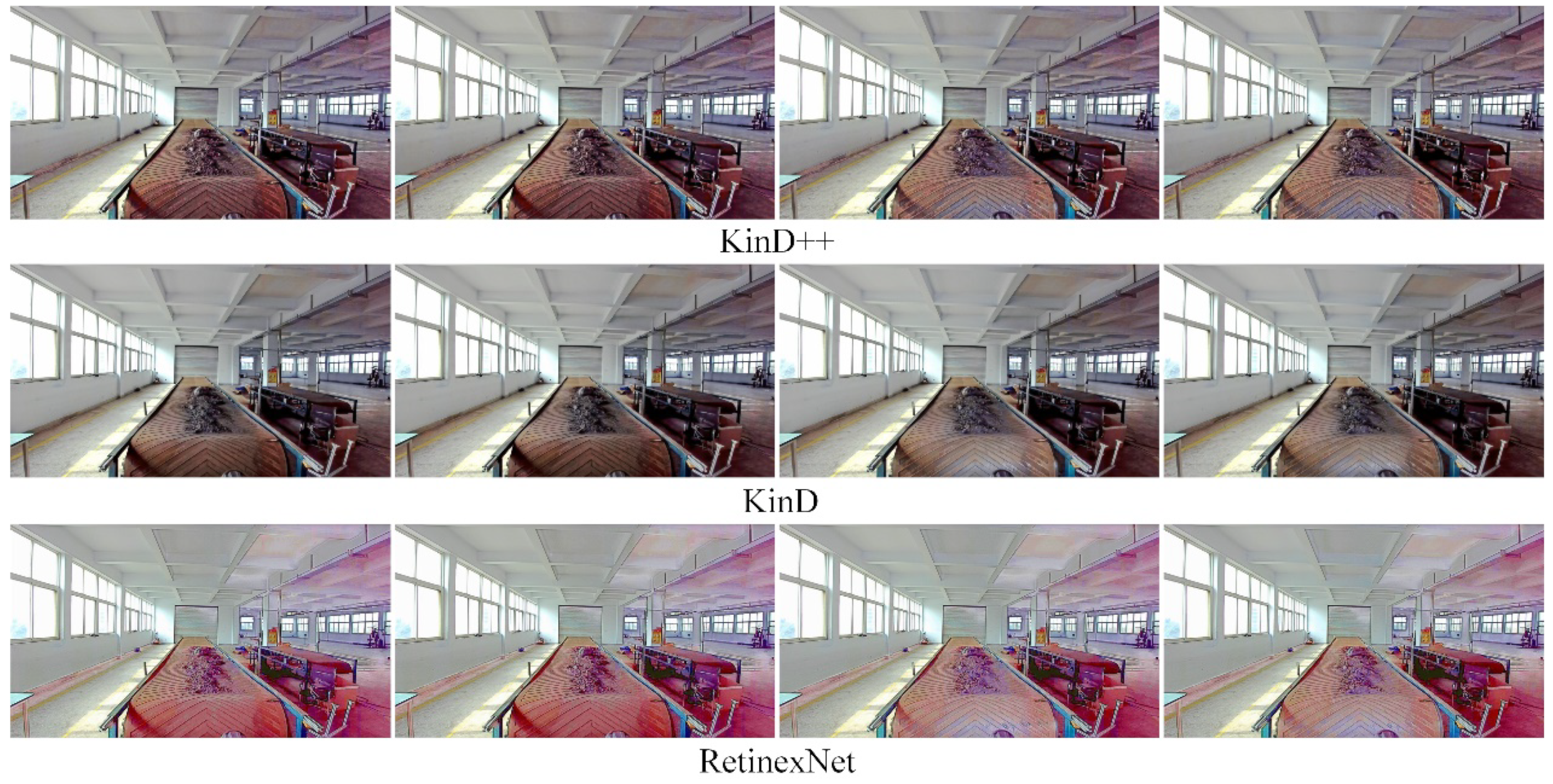
4.1. KinD++ Algorithm Experimentation and Analysis
4.1.1. Dataset Production
4.1.2. Training Setup
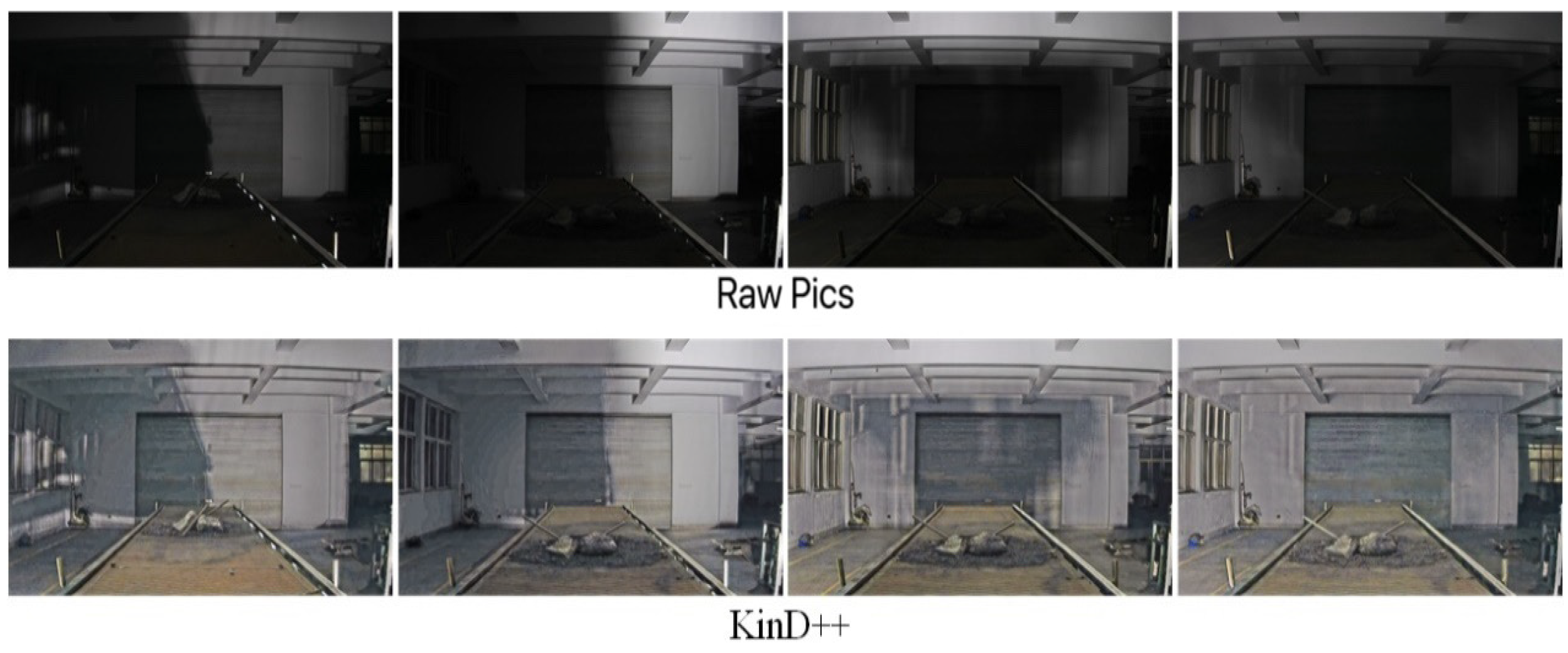
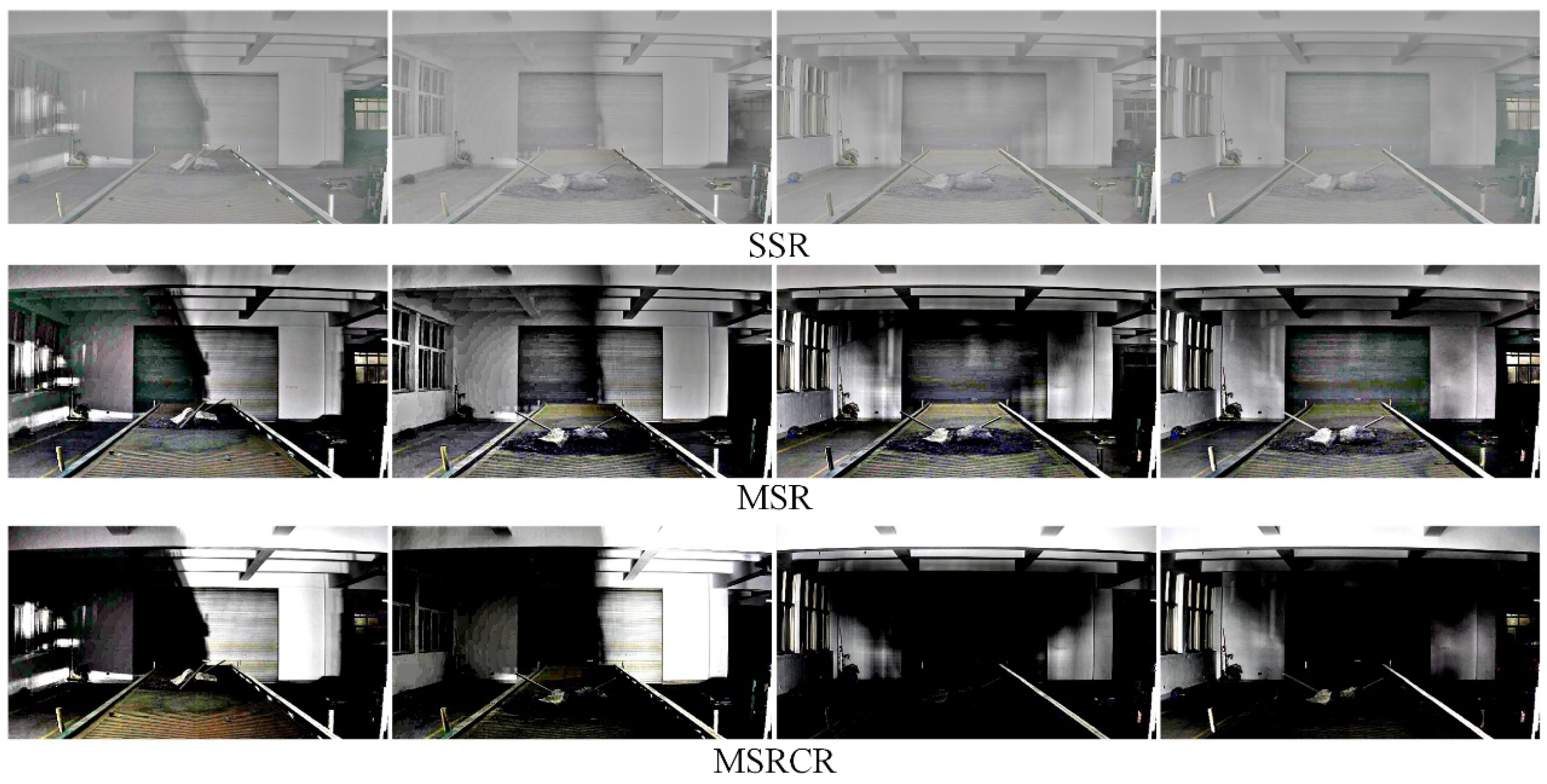
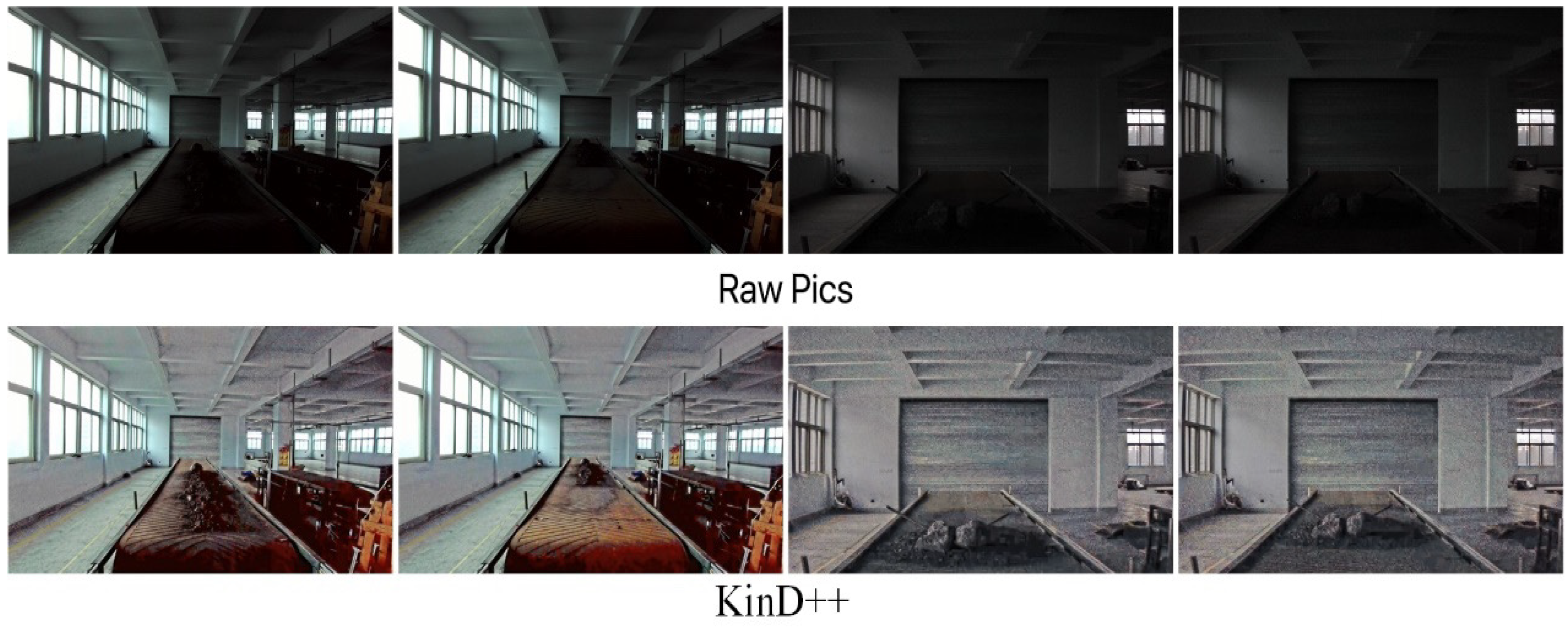
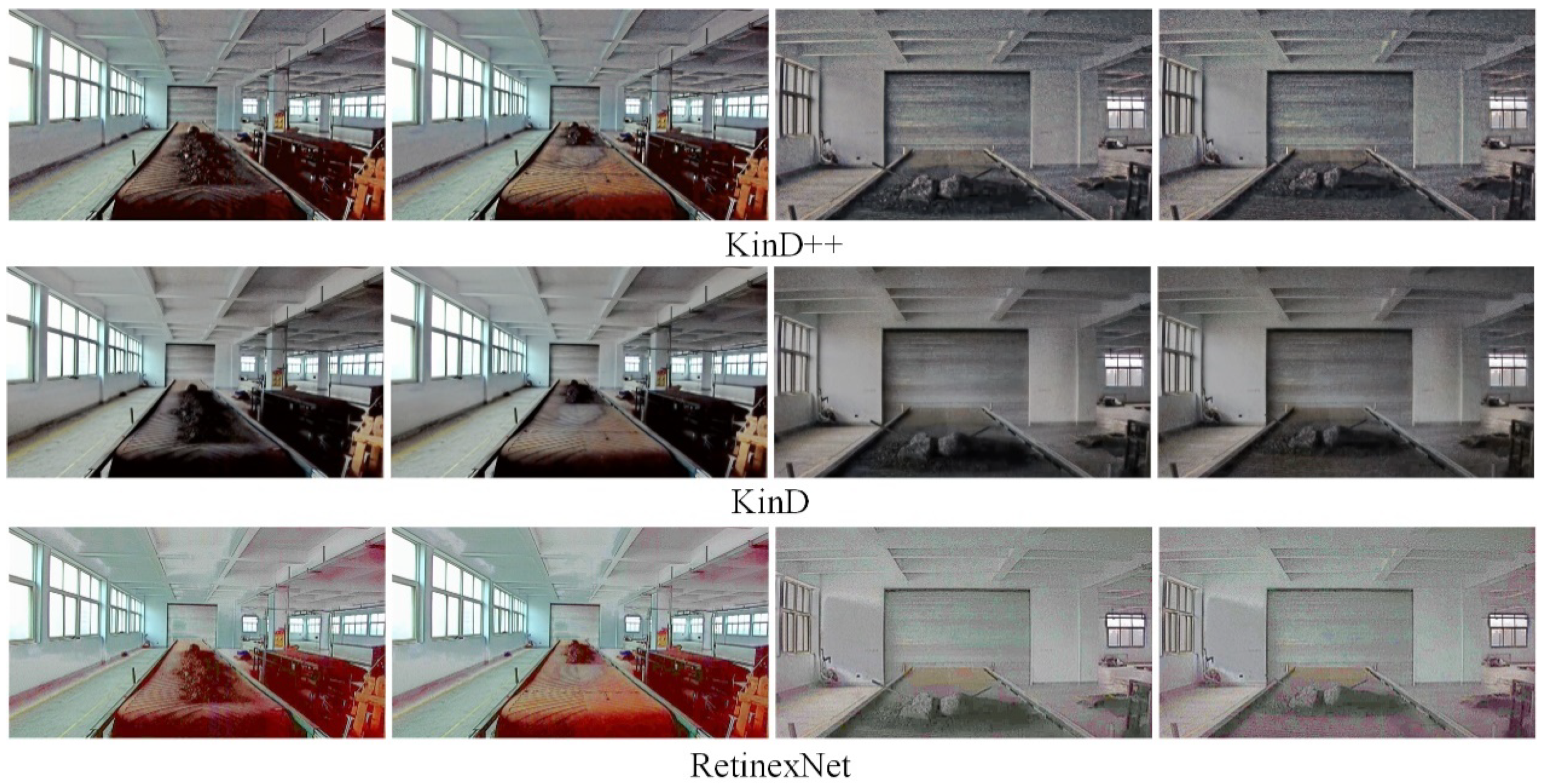
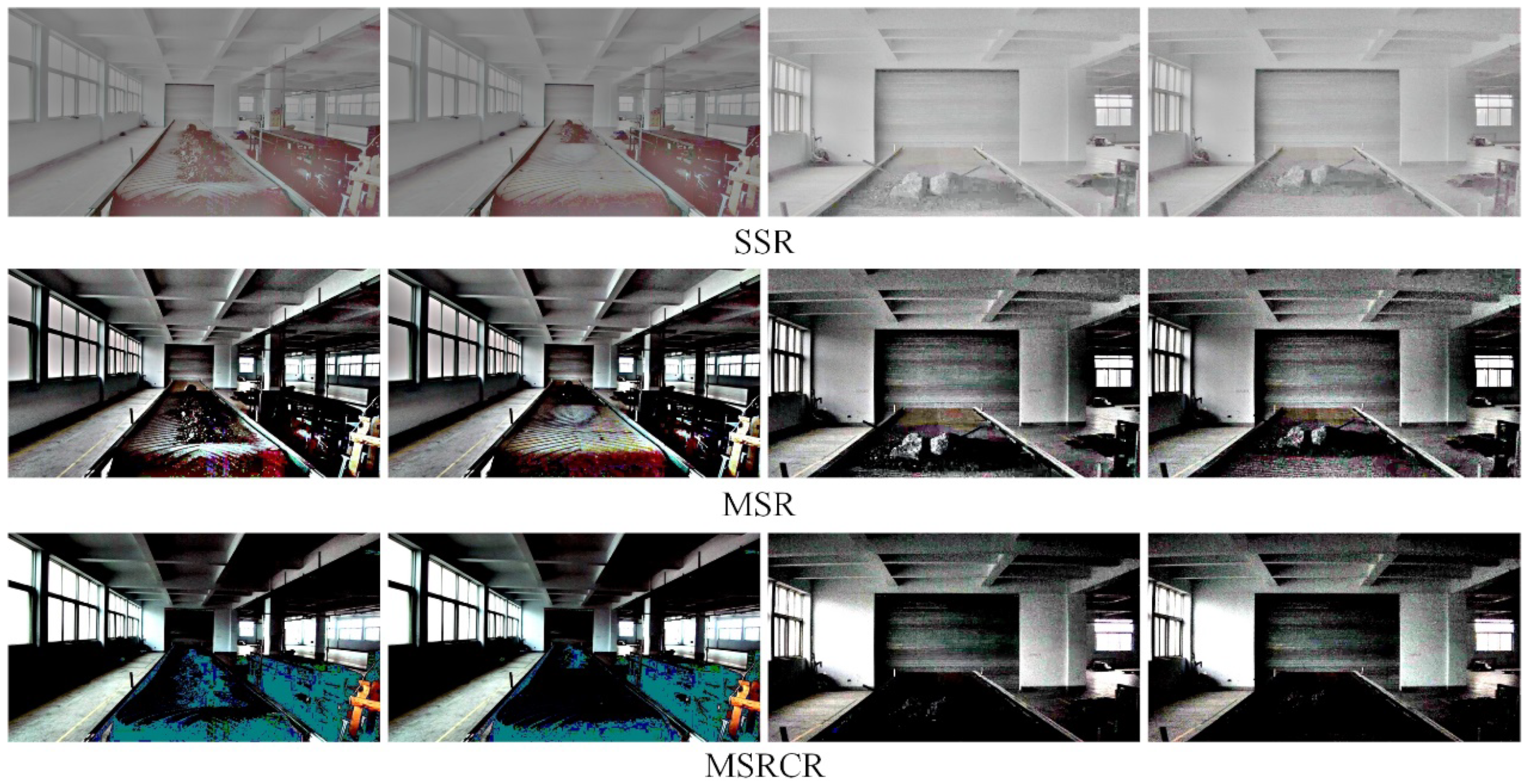
4.1.3. Results and Analysis
4.2. Target Detection Experiments and Analysis
4.2.1. Dataset Extension Enhancement
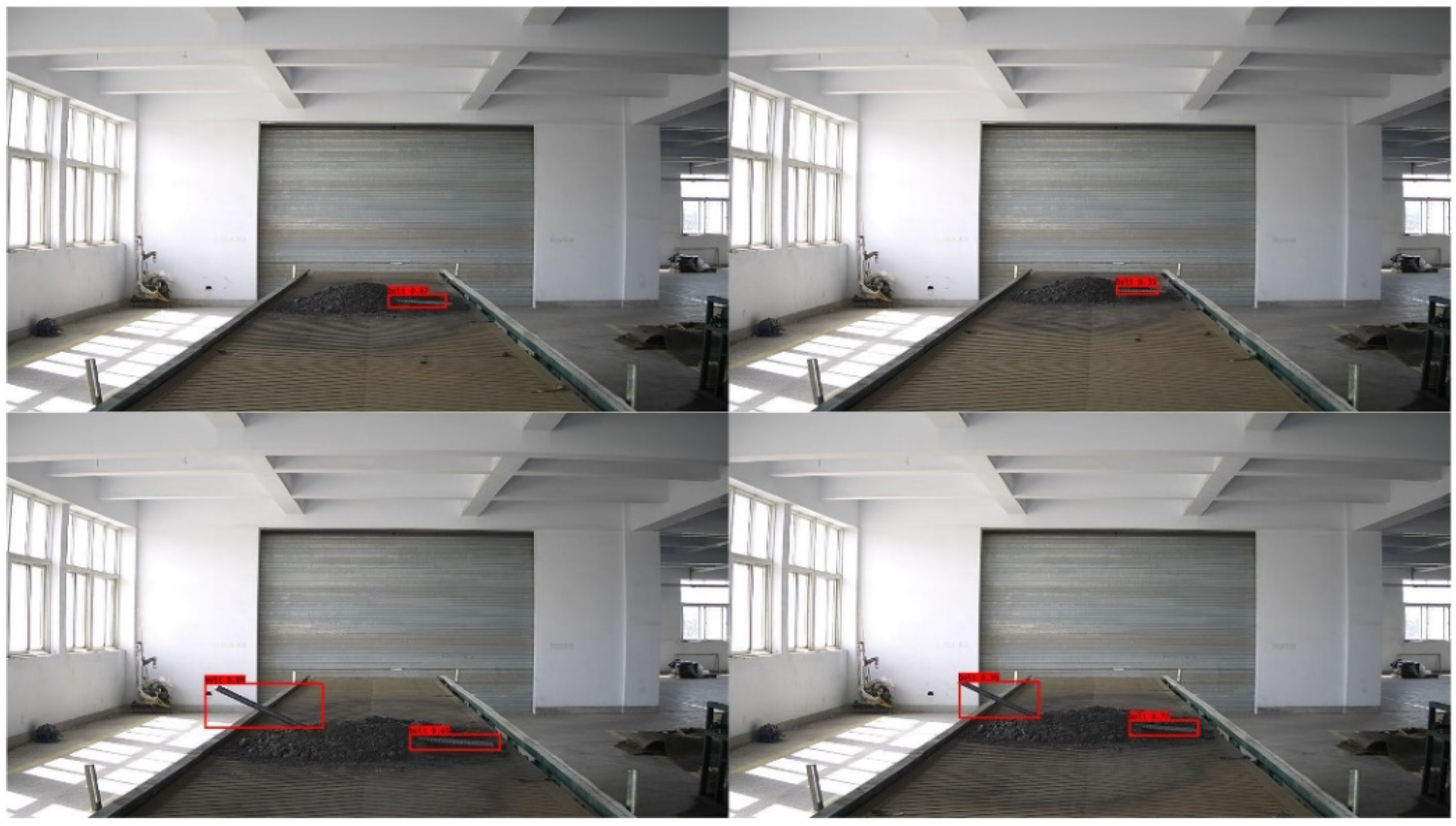
4.2.2. Experiments and Analysis of Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Yang, R.; Qiao, T.; Pang, Y.; Yang, Y.; Zhang, H.; Yan, G. Infrared spectrum analysis method for detection and early warning of longitudinal tear of mine conveyor belt. Measurement 2020, 165, 107856. [Google Scholar] [CrossRef]
- Guo, Y.; Zhang, Y.; Li, F.; Wang, S.; Cheng, G. Research of coal and gangue identification and positioning method at mobile device. Int. J. Coal Prep. Util. 2022, 1–17. [Google Scholar] [CrossRef]
- Zhang, J.; Han, X.; Cheng, D. Improving coal/gangue recognition efficiency based on liquid intervention with infrared imager at low emissivity. Measurement 2022, 189, 110445. [Google Scholar] [CrossRef]
- Wang, W.D.; Lv, Z.Q.; Lu, H.R. Research on methods to differentiate coal and gangue using image processing and a support vector machine. Int. J. Coal Prep. Util. 2018, 41, 603–616. [Google Scholar] [CrossRef]
- Li, D.; Meng, G.; Sun, Z.; Xu, L. Autonomous Multiple Tramp Materials Detection in Raw Coal Using Single-Shot Feature Fusion Detector. Appl. Sci. 2021, 12, 107. [Google Scholar] [CrossRef]
- Zhao, Y.D.; He, X.M. Recognition of coal and gangue based on X-Ray. Appl. Mech. Mater. 2013, 275–277, 2350–2353. [Google Scholar] [CrossRef]
- Kelloway, S.J.; Ward, C.R.; Marjo, C.E.; Wainwright, I.E.; Cohen, D.R. Quantitative chemical profiling of coal using core-scanning X-Ray fluorescence techniques. Int. J. Coal Geol. 2014, 128–129, 55–67. [Google Scholar] [CrossRef]
- Chen, X.; Wang, S.; Liu, H.; Yang, J.; Liu, S.; Wang, W. Coal gangue recognition using multichannel auditory spectrogram of hydraulic support sound in convolutional neural network. Meas. Sci. Technol. 2021, 33, 015107. [Google Scholar] [CrossRef]
- Xu, S.; Cheng, G.; Cui, Z.; Jin, Z.; Gu, W. Measuring bulk material flow—Incorporating RFID and point cloud data processing. Measurement 2022, 200, 111598. [Google Scholar] [CrossRef]
- Zhao, Y.D.; Sun, M.F. Image processing and recognition system based on DaVinci technology for coal and gangue. Appl. Mech. Mater. 2011, 130–134, 2107–2110. [Google Scholar] [CrossRef]
- Li, L.; Wang, H.; An, L. Research on recognition of coal and gangue based on image processing. World J. Eng. 2015, 12, 247–254. [Google Scholar] [CrossRef]
- Yu, L. A new method for image recognition of coal and coal gangue. Mod. Comput. 2017, 17, 66–70. [Google Scholar]
- Land, E.H. The Retinex theory of color vision. Sci. Am. 1978, 237, 108–128. [Google Scholar] [CrossRef] [PubMed]
- Jobson, D.J.; Rahman, Z.U.; Woodell, G.A. Properties and performance of a center/surround Retinex. IEEE Trans. Image Process. 1997, 6, 451–462. [Google Scholar] [CrossRef] [PubMed]
- Jobson, D.J.; Rahman, Z.; Woodell, G.A. A multiscale retinex for bridging the gap between color images and the human observation of scenes. IEEE Trans. Image Process. 2002, 6, 965–976. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Y.; Zhang, J.; Guo, X. Kindling the darkness: A practical low-light image enhancer. In Proceedings of the ACM International Conference on Multimedia, Nice, France, 21–25 October 2019; pp. 1632–1640. [Google Scholar]
- Yun, S.; Han, D.; Oh, S.J.; Chun, S.; Choe, J.; Yoo, Y. CutMix: Regularization strategy to train strong classifiers with localizable features. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Seoul, Korea, 27 October–2 November 2019; pp. 6023–6032. [Google Scholar]
- Ghiasi, G.; Lin, T.Y.; Le, Q.V. DropBlock: A regularization method for convolutional networks. In Proceedings of the Conference on Neural Information Processing Systems, Montreal, QC, Canada, 3–8 December 2018; p. 31. [Google Scholar]
- Zhong, Z.; Zheng, L.; Kang, G.; Li, S.; Yang, Y. Random erasing data augmentation. In Proceedings of the AAAI Conference on Artificial Intelligence, New York, NY, USA, 7–12 February 2020; Volume 34, pp. 13001–13008. [Google Scholar]
- Terrance, D.V.; Graham, W.T. Improved regularization of convolutional neural networks with CutOut. arXiv 2017, arXiv:1708.04552. [Google Scholar]
- Singh, K.K.; Yu, H.; Sarmasi, A.; Pradeep, G.; Lee, Y.J. Hide-and-Seek: A data augmentation technique for weakly-supervised localization and beyond. arXiv 2018, arXiv:1811.02545. [Google Scholar]
- Wang, Y.; Bai, H.; Sun, L.; Tang, Y.; Huo, Y.; Min, R. The Rapid and Accurate Detection of Kidney Bean Seeds Based on a Compressed Yolov3 Model. Agriculture 2022, 12, 1202. Available online: https://www.mdpi.com/2077-0472/12/8/1202 (accessed on 31 July 2022). [CrossRef]
- Krishna, K.S.; Hao, Y.; Aron, S.; Pradeep, G.; Lee, Y.J. Hide-and-Seek: A data augmentation technique for weakly-supervised localization and beyond [J/OL]. arXiv 2018, arXiv:1811.02545. https://arxiv.org/abs/1811.02545. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Patch-Size | Batch-Size | Epoch | LR | |
|---|---|---|---|---|
| Layer decomposition network | 48 | 10 | 2000 | 0.0001 |
| Illumination adjustment network | 48 | 10 | 2000 | 0.0001 |
| Reflectance recovery network | 384 | 4 | 1000 | 0.0001 |
| Small Target | Medium Target | Big Target | |
|---|---|---|---|
| Original anchor box | 10,13;16,30;33,23 | 30,61;62,45;59,119 | 116,90;156,198;373,326 |
| This article anchor box | 18,28;32,37;33,13 | 39,18;50,22;61,31 | 73,44;88,10;116,54 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, Y.; Sun, X.; Xu, L.; Ma, S.; Li, J.; Pang, Y.; Cheng, G. Application of YOLOv4 Algorithm for Foreign Object Detection on a Belt Conveyor in a Low-Illumination Environment. Sensors 2022, 22, 6851. https://doi.org/10.3390/s22186851
Chen Y, Sun X, Xu L, Ma S, Li J, Pang Y, Cheng G. Application of YOLOv4 Algorithm for Foreign Object Detection on a Belt Conveyor in a Low-Illumination Environment. Sensors. 2022; 22(18):6851. https://doi.org/10.3390/s22186851
Chicago/Turabian StyleChen, Yiming, Xu Sun, Liang Xu, Sencai Ma, Jun Li, Yusong Pang, and Gang Cheng. 2022. "Application of YOLOv4 Algorithm for Foreign Object Detection on a Belt Conveyor in a Low-Illumination Environment" Sensors 22, no. 18: 6851. https://doi.org/10.3390/s22186851
APA StyleChen, Y., Sun, X., Xu, L., Ma, S., Li, J., Pang, Y., & Cheng, G. (2022). Application of YOLOv4 Algorithm for Foreign Object Detection on a Belt Conveyor in a Low-Illumination Environment. Sensors, 22(18), 6851. https://doi.org/10.3390/s22186851