
CHMM Object Detection Based on Polygon Contour Features by PSM


Abstract
:1. Introduction
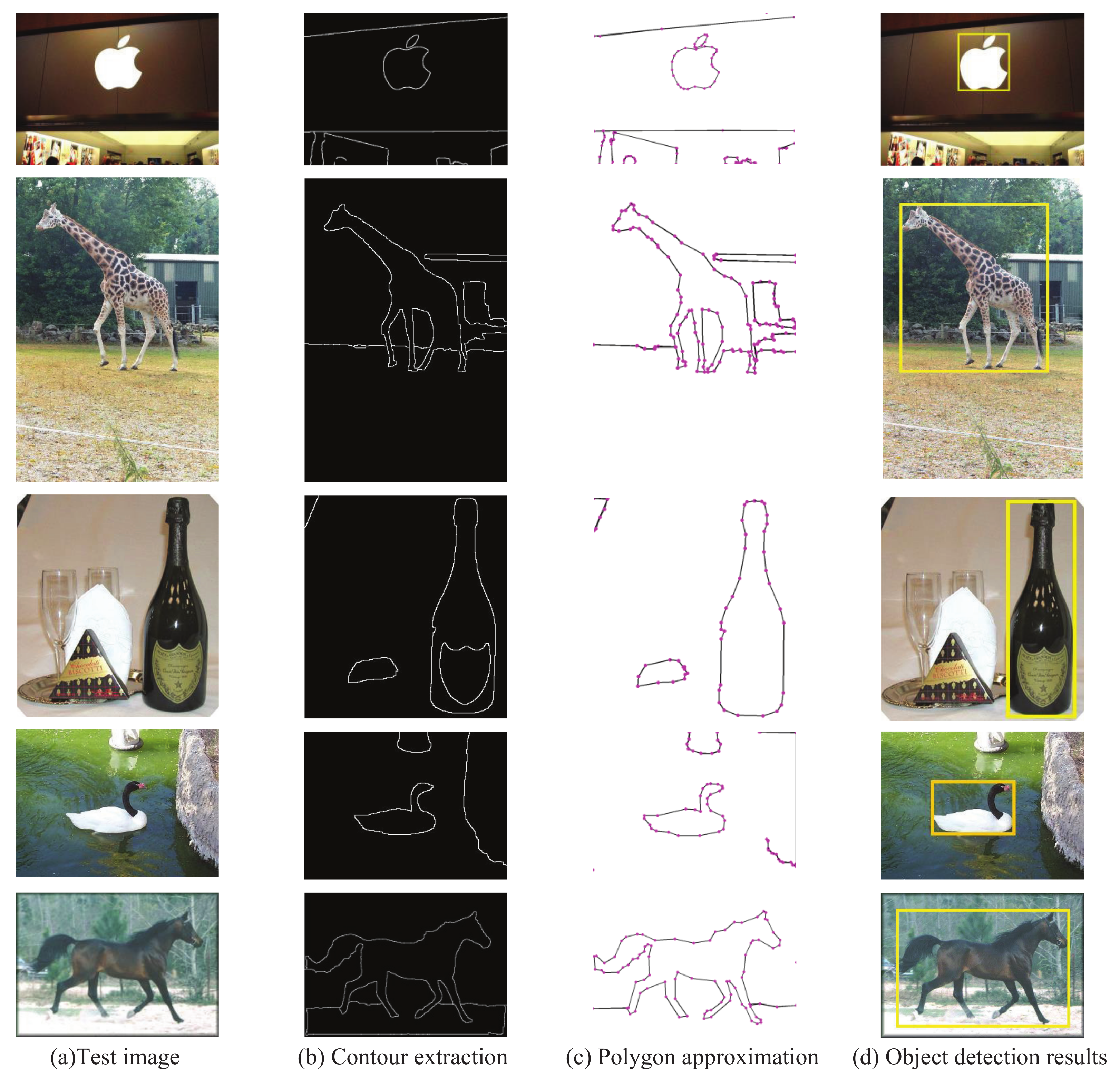
2. Polygon Contour Feature Extraction
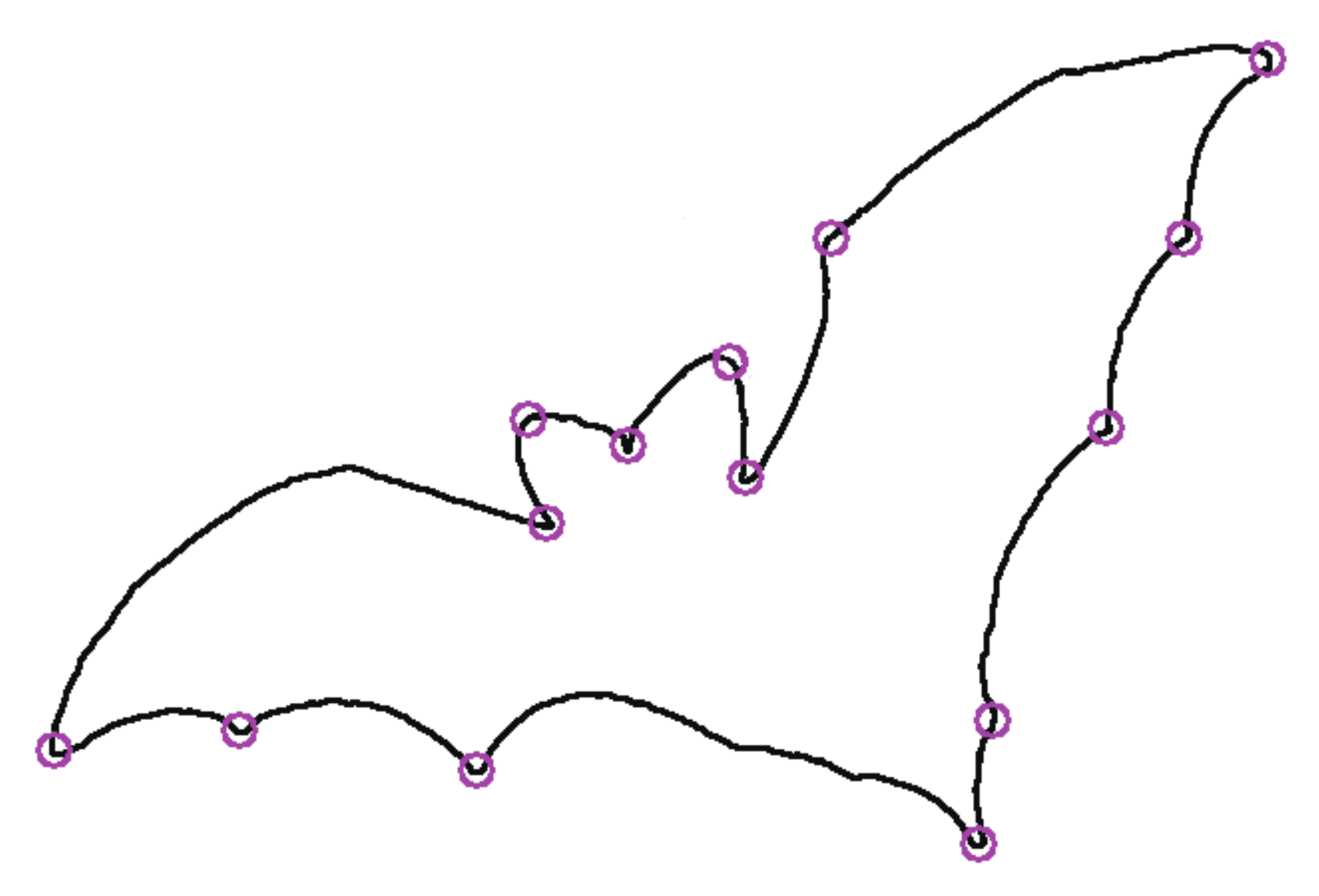
2.1. Contour Piecewise by Sharpness-Based Corner
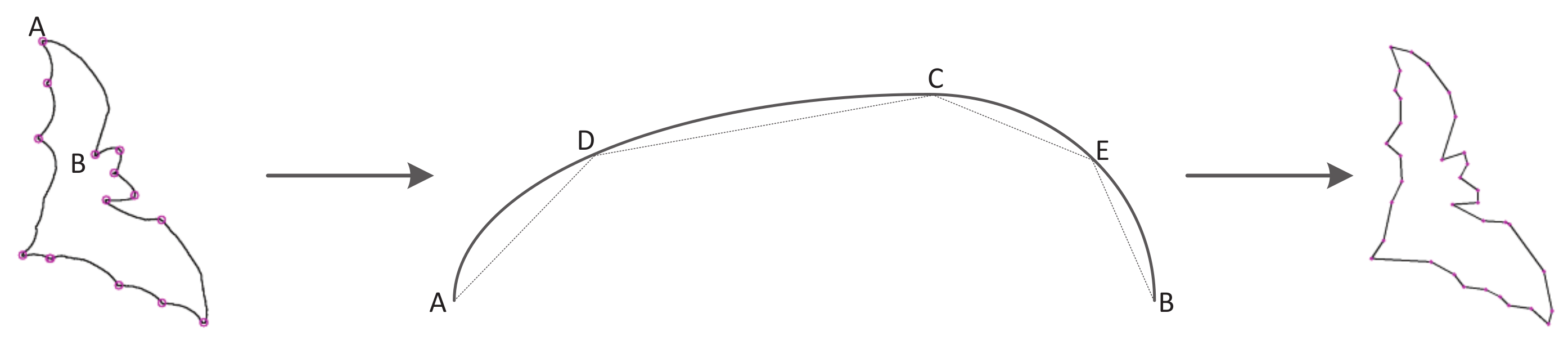
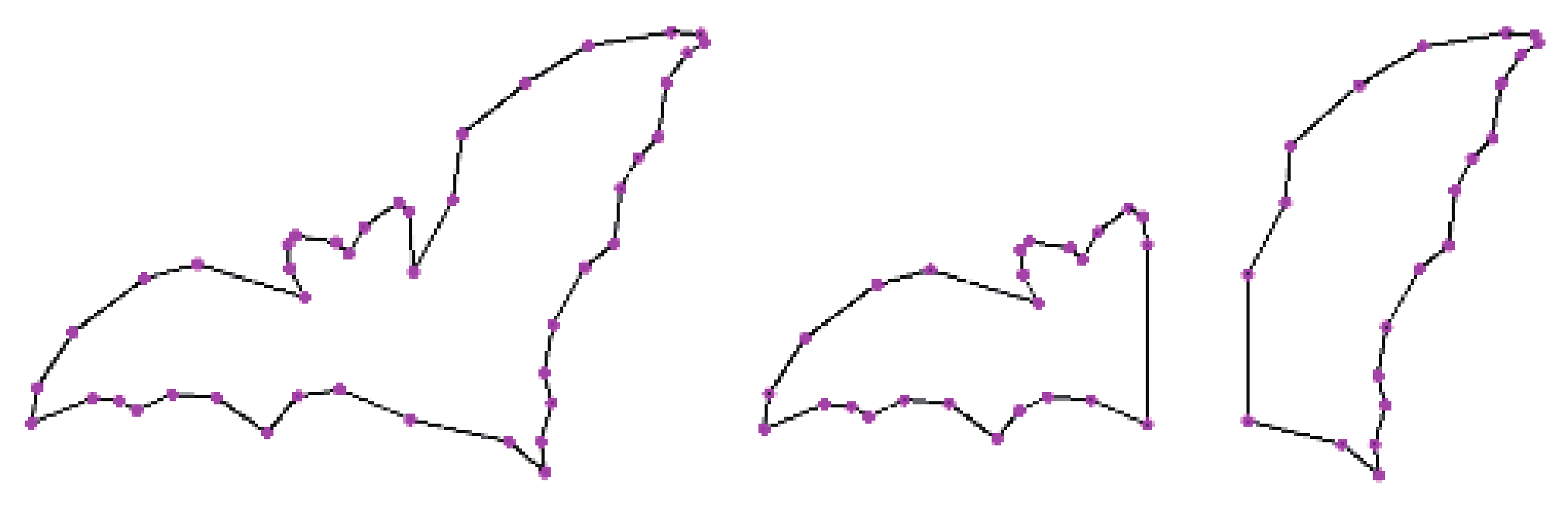
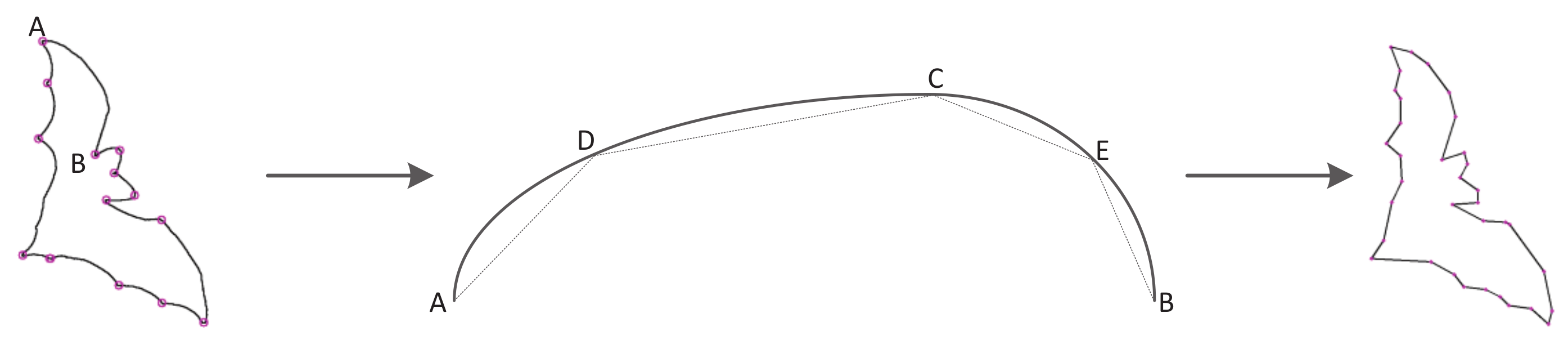
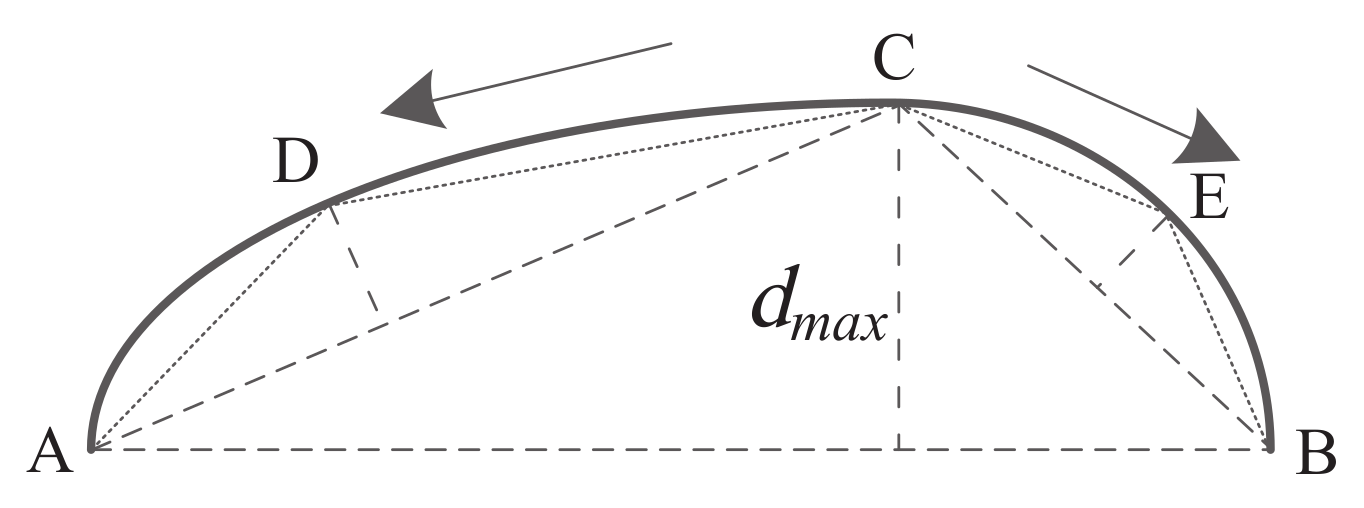
2.2. PSM Polygonal-Approximation Algorithm
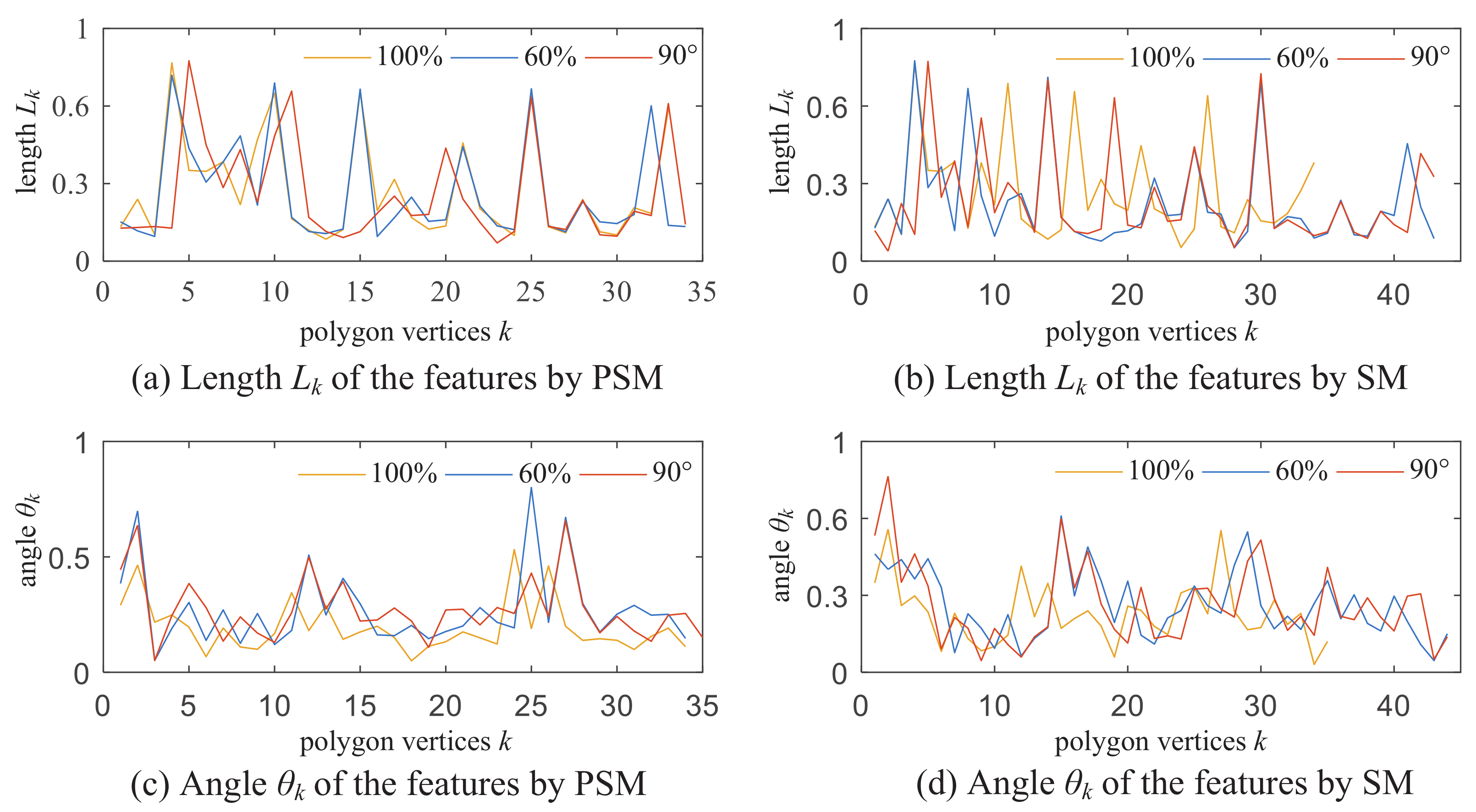
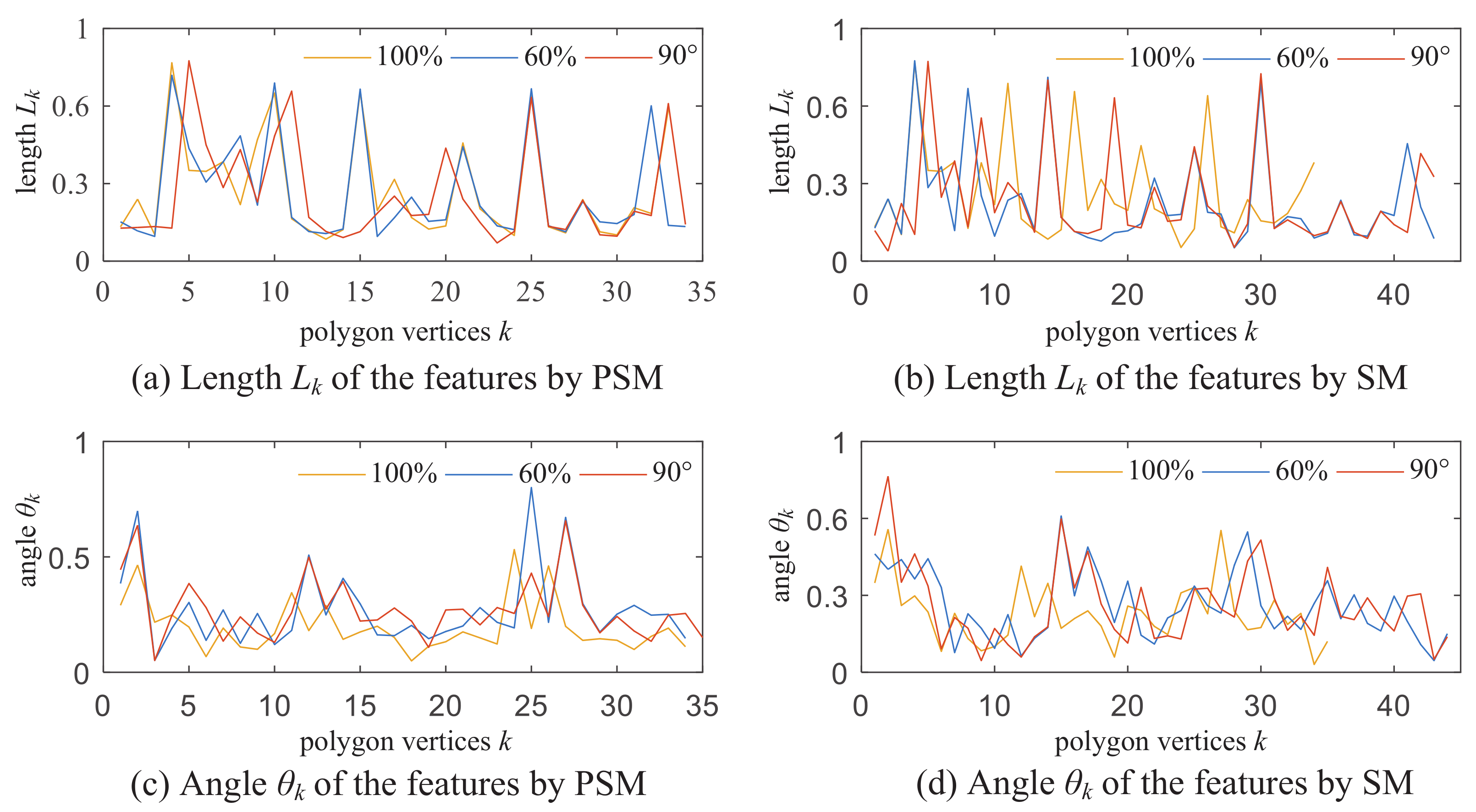
2.3. Contour Feature
3. Experiment and Result Analysis
3.1. CHMM
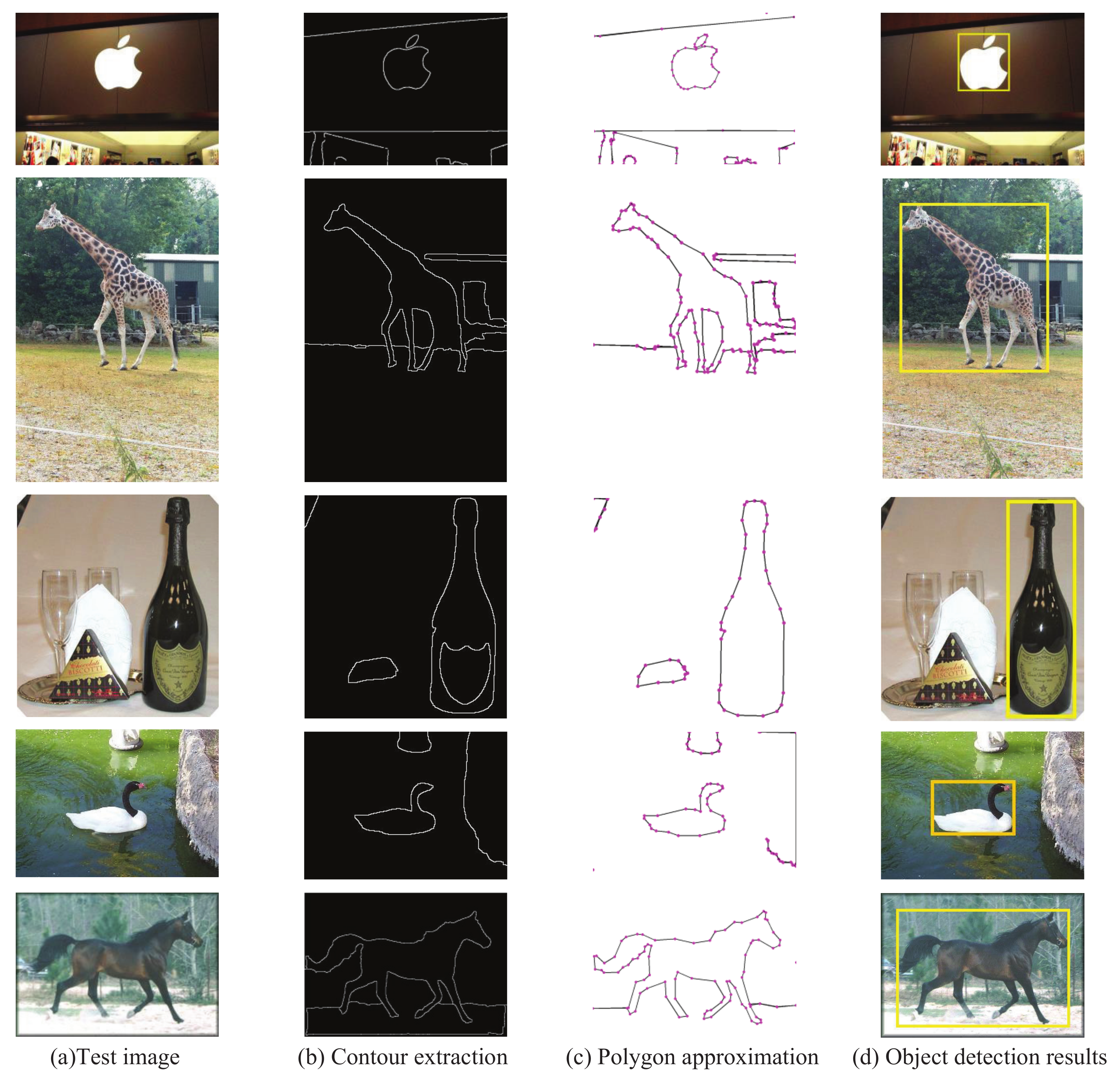
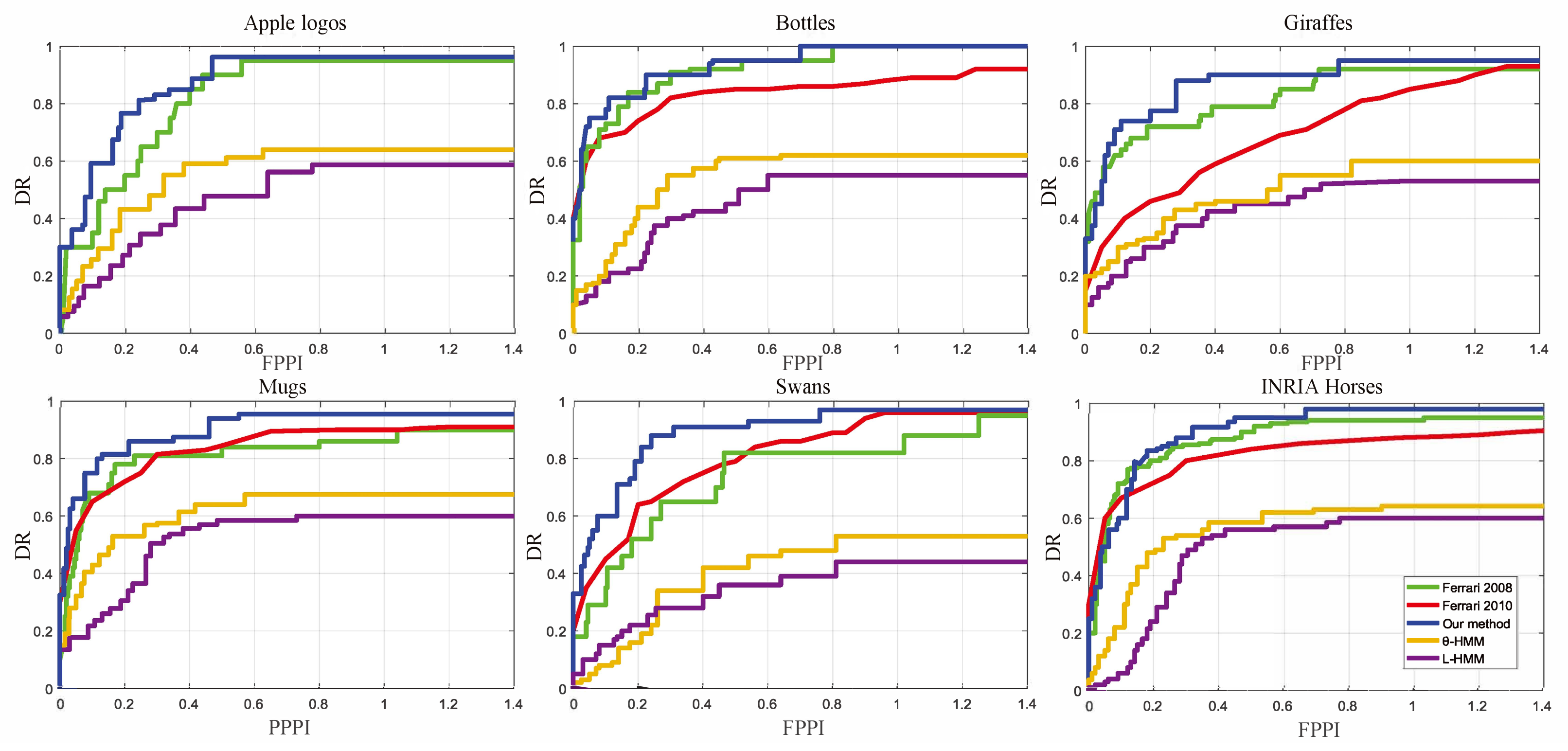
3.2. Experimental Results
4. Conclusions
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Tsai, P.F.; Liao, C.H.; Yuan, S.-M. Using Deep Learning with Thermal Imaging for Human Detection in Heavy Smoke Scenarios. Sensors 2022, 22, 5351. [Google Scholar] [CrossRef] [PubMed]
- Yang, J.; Wang, L.; Li, Y. Feature Refine Network for Salient Object Detection. Sensors 2022, 22, 4490. [Google Scholar] [CrossRef] [PubMed]
- Wei, H.; Yu, Q.; Yang, C.; Minhas, H.N. Shape-based Object Recognition via Evidence Accumulation Inference. Pattern Recognit. Lett. 2016, 77, 42–49. [Google Scholar] [CrossRef]
- Giang, T.H.; Khai, T.Q.; Im, D.Y.; Ryoo, Y.J. Fast Detection of Tomato Sucker Using Semantic Segmentation Neural Networks Based on RGB-D Images. Sensors 2022, 22, 5140. [Google Scholar] [CrossRef] [PubMed]
- Wei, H.; Yang, C.; Yu, Q.; Minhas, H.N. Efficient Graph-Based Search for Object Detection; Elsevier Science Inc.: Amsterdam, The Netherlands, 2017; Volume 385, pp. 395–414. [Google Scholar]
- Wei, H.; Yang, C.; Yu, Q. Contour Segment Grouping for Object Detection. J. Vis. Commun. Image Represent. 2017, 48, 292–309. [Google Scholar] [CrossRef]
- Ferrari, V.; Fevrier, L.; Jurie, F. Groups of Adjacent Contour Segments for Object Detection. IEEE Trans. Pattern Anal. Mach. Intell. 2008, 30, 36–51. [Google Scholar] [CrossRef] [PubMed]
- Martin, E.M.; Pobil, A.P.D. Object Detection and Recognition for Assistive Robots. IEEE Robot. Autom. Mag. 2017, 99, 1. [Google Scholar]
- Zhang, G.M.; Xu, J.Y.; Liu, J.X. A New Method for Recognition Partially Occluded Curved Objects under Affine Transformation. In Proceedings of the 10th International Conference on Intelligent Systems and Knowledge Engineering, Taipei, Taiwan, 24–27 November 2016; pp. 456–461. [Google Scholar]
- Huang, C.; Han, T.X.; He, Z.; Cao, W. Constellational Contour Parsing for Deformable Object Detection. J. Vis. Commun. Image Represent. 2016, 38, 540–549. [Google Scholar] [CrossRef]
- Riemenschneider, H.; Donoser, M.; Bischof, H. Using Partial Edge Contour Matches for Efficient Object Category Localization. In Proceedings of the 11th European Conference on Computer Vision, Crete, Greece, 5–11 September 2010; pp. 29–42. [Google Scholar]
- Ma, L.; Jiang, B. Edge Grouping with a Novel Shape Model for Object Detection. In Proceedings of the Seventh International Conference on Image and Graphics, Qingdao, China, 26–28 July 2013; pp. 186–191. [Google Scholar]
- Ramer, U. An Iterative Procedure for the Polygonal Approximation of Plane Curves. Comput. Graph. Image Process. 1972, 1, 244–256. [Google Scholar] [CrossRef]
- Qian, W.G.; Liu, X.Z. Detection Algorithm of Image Corner Based on Contour Sharp Degree. Comput. Eng. 2008, 34, 202–204. (In Chinese) [Google Scholar]
- Guerrero-Peña, F.A.; Vasconcelos, G.C. Object Recognition Under Severe Occlusions with a Hidden Markov Model Approach. Pattern Recognit. Lett. 2017, 86, 68–75. [Google Scholar] [CrossRef]
- Guerrero-Peña, F.A.; Vasconcelos, G.C. Search-space Sorting with Hidden Markov Models for Occluded Object Recognition. In Proceedings of the IEEE 8th International Conference on Intelligent Systems, Sofia, Bulgaria, 1–4 September 2016. [Google Scholar]
- Bicego, M.; Murino, V. Investigating Hidden Markov Models’ Capabilities in 2D Shape Classification. IEEE Trans. Pattern Anal. Mach. Intell. 2004, 26, 281–286. [Google Scholar] [CrossRef] [PubMed]
- Brand, M.; Oliver, N.; Pentland, A. Coupled Hidden Markov Models for Complex Action Recognition. In Proceedings of the 1997 Conference on Computer Vision and Pattern Recognition, Washington, DC, USA, 17–19 June 1997; pp. 994–999. [Google Scholar]
- Zhou, H.; Chen, J.; Dong, G. Bearing Fault Recognition Method Based on Neighbourhood Component Analysis and Coupled Hidden Markov Model. Mech. Syst. Signal Proc. 2016, 66, 568–581. [Google Scholar] [CrossRef]
- Arbelaez, P.; Maire, M.; Fowlkes, C.; Malik, J. Contour Detection and Hierarchical Image Segmentation. IEEE Trans. Pattern Anal. Mach. Intell. 2011, 33, 898–916. [Google Scholar] [CrossRef] [PubMed]
- Wang, Z.Z. Recognition of Occluded Objects by Slope Difference Distribution Features. Appl. Soft. Comput. 2022, 120, 108622. [Google Scholar] [CrossRef]
- Xiao, W.B. Study on Coupled Hidden Markov Model Based Rolling Element Bearing Fault Diagnosis and Performance Degradation Assessment; Shanghai Jiao Tong University: Shanghai, China, 2011. [Google Scholar]
- Yu, Q.; Wei, H.; Yang, C.Z. Local Part Chamfer Matching for Shape-based Object Detection. Pattern Recognit. 2017, 65, 82–96. [Google Scholar] [CrossRef]
- Wei, H.; Dong, Z.; Wang, L.P. V4 Shape Features for Contour Representation and Object Detection. Neural Netw. 2018, 97, 46–61. [Google Scholar] [CrossRef] [PubMed]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | Threshold | 100% | 80% | 60% | ||
|---|---|---|---|---|---|---|
| SM | 2 | 76 | 65 | 58 | 74 | 71 |
| SM | 4 | 45 | 40 | 36 | 45 | 45 |
| PSM | 0.03, 0.03 | 36 | 35 | 35 | 35 | 34 |
| PSM | 0.05, 0.05 | 26 | 26 | 26 | 26 | 26 |
| -HMM | L-HMM | Ferrari 2010 | PSM-CHMM | |
|---|---|---|---|---|
| Apple logos | 0.62/0.63 | 0.56/0.6 | 0.777/0.832 | 0.826/0.84 |
| Bottles | 0.501/0.51 | 0.38/0.42 | 0.798/0.816 | 0.91/0.93 |
| Giraffes | 0.36/0.426 | 0.328/0.34 | 0.399/0.445 | 0.833/0.854 |
| Mugs | 0.545/0.59 | 0.49/0.51 | 0.751/0.8 | 0.926/0.933 |
| Swans | 0.35/0.37 | 0.32/0.4 | 0.632/0.705 | 0.87/0.905 |
| INRIA Horses | 0.46/0.51 | 0.50/0.53 | 0.78/0.80 | 0.85/0.862 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhuo, S.; Huang, Y. CHMM Object Detection Based on Polygon Contour Features by PSM. Sensors 2022, 22, 6556. https://doi.org/10.3390/s22176556
Zhuo S, Huang Y. CHMM Object Detection Based on Polygon Contour Features by PSM. Sensors. 2022; 22(17):6556. https://doi.org/10.3390/s22176556
Chicago/Turabian StyleZhuo, Shufang, and Yanwei Huang. 2022. "CHMM Object Detection Based on Polygon Contour Features by PSM" Sensors 22, no. 17: 6556. https://doi.org/10.3390/s22176556
APA StyleZhuo, S., & Huang, Y. (2022). CHMM Object Detection Based on Polygon Contour Features by PSM. Sensors, 22(17), 6556. https://doi.org/10.3390/s22176556