
Test and Analysis of Vegetation Coverage in Open-Pit Phosphate Mining Area around Dianchi Lake Using UAV–VDVI


Abstract
:1. Introduction
2. Research Area and Data Preparation
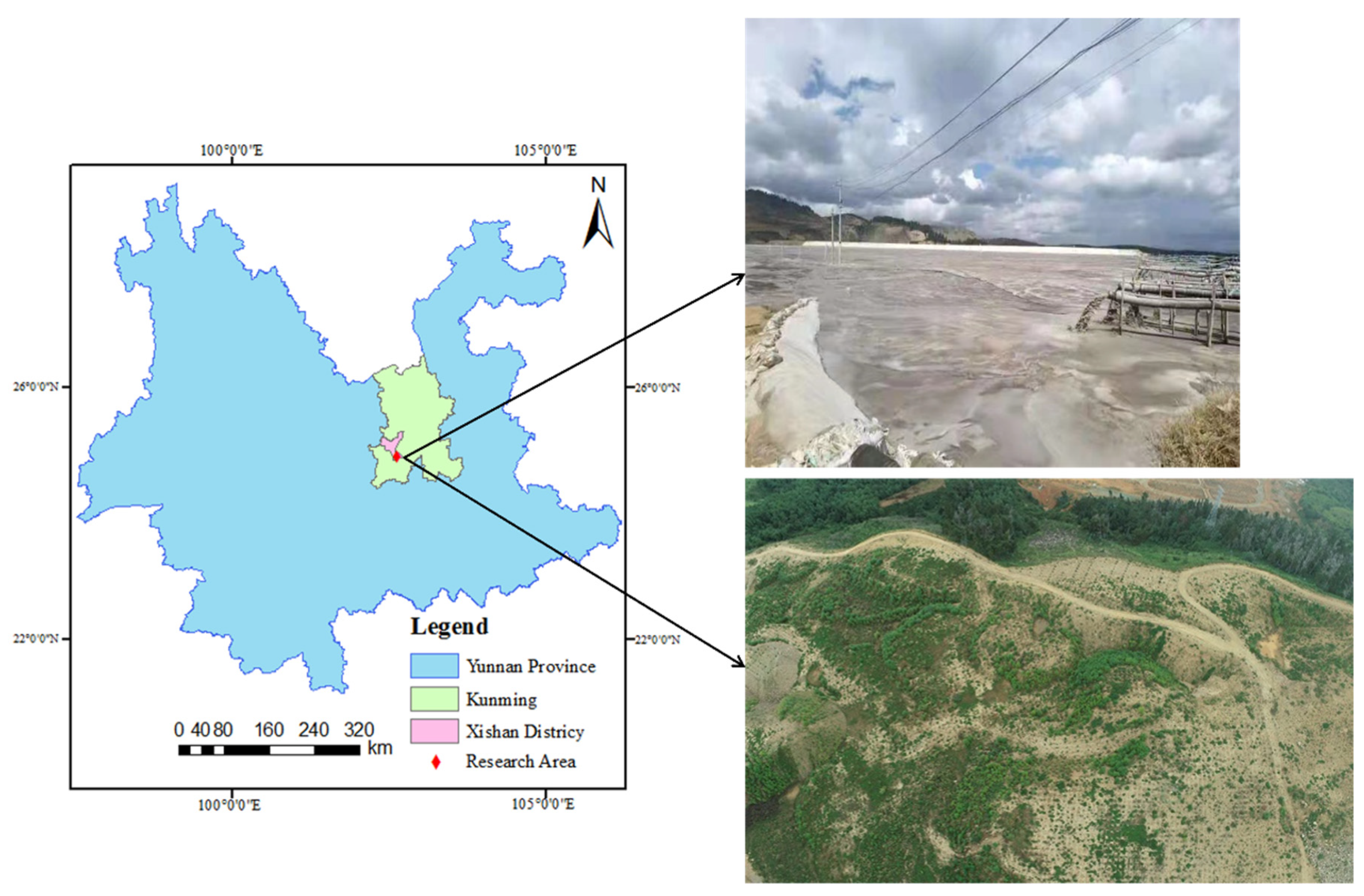
2.1. Research Area
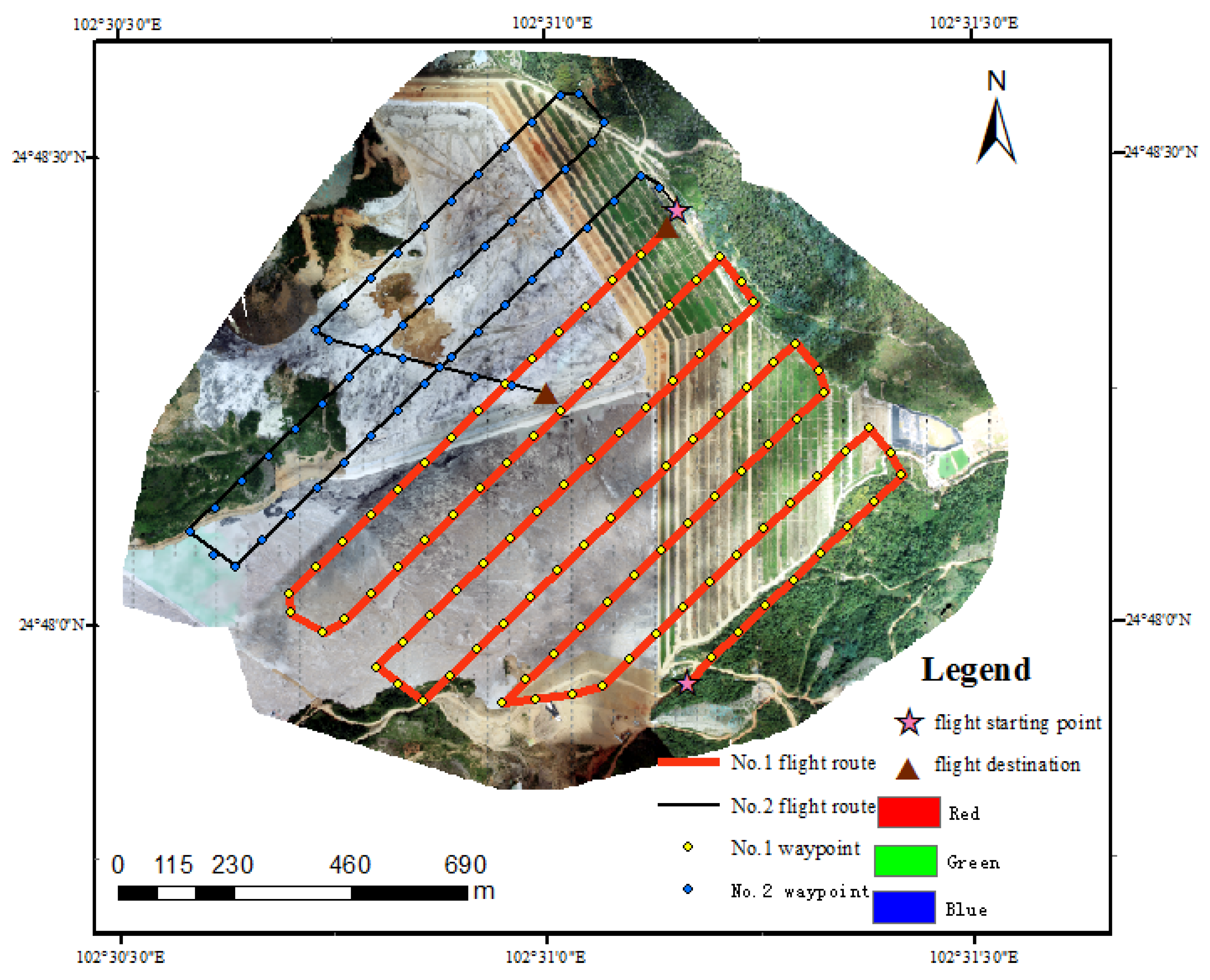
2.2. Data Acquisition
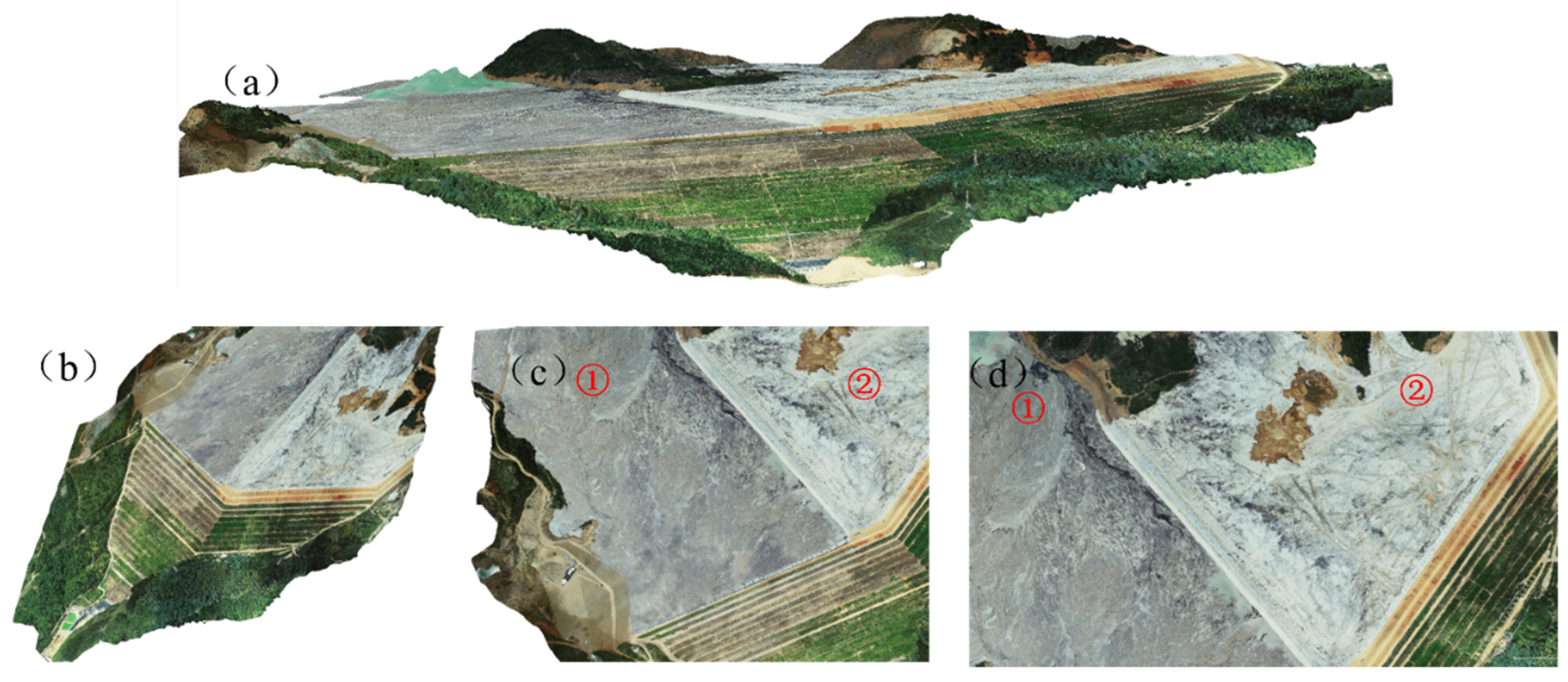
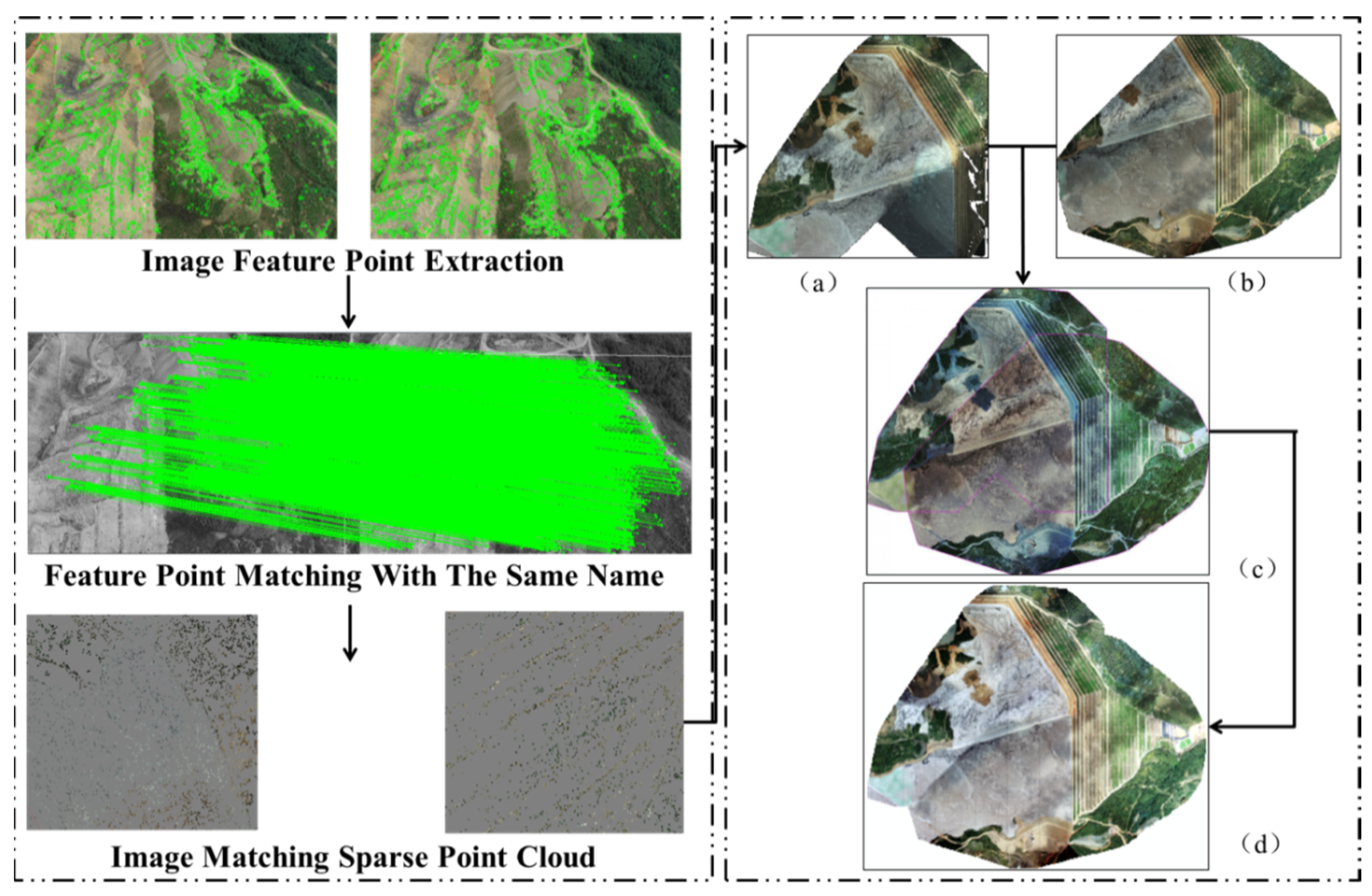
2.3. Construction of the DIM Point Cloud and DOM
2.3.1. Construction of the DIM Point Cloud
2.3.2. Construction of the DOM
2.3.3. 2D Image Information and 3D Point Cloud Mapping
3. Research Methods
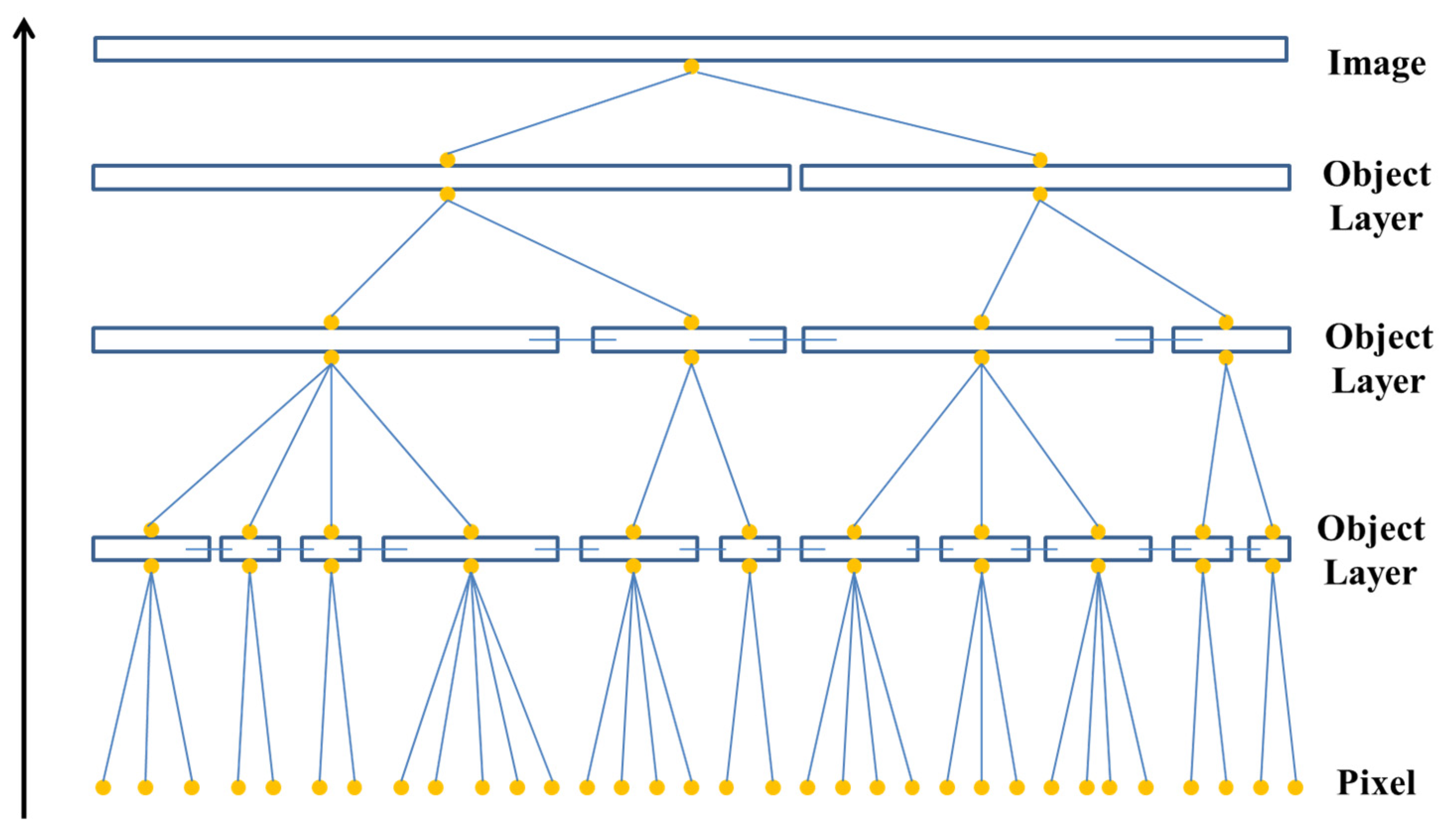
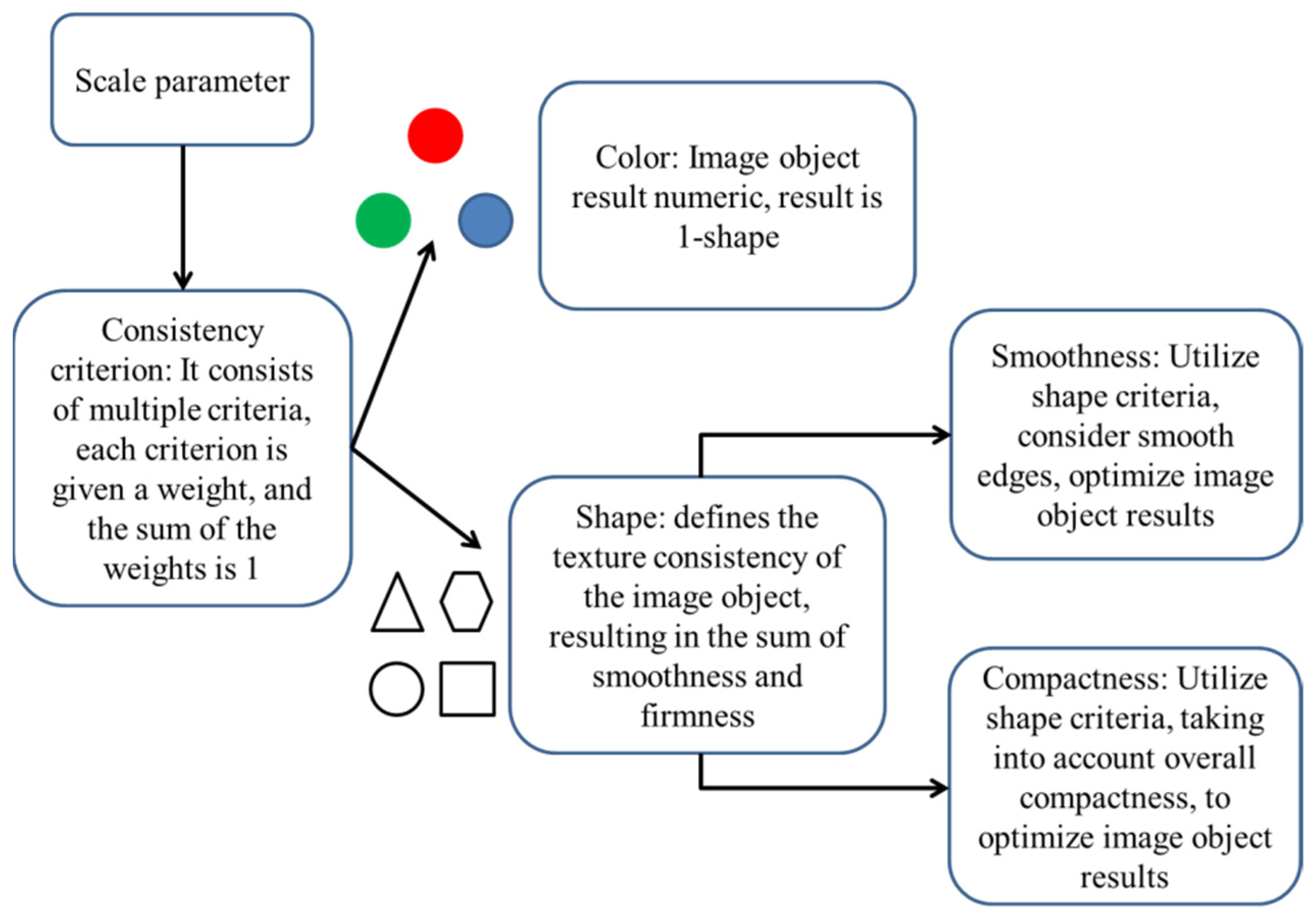
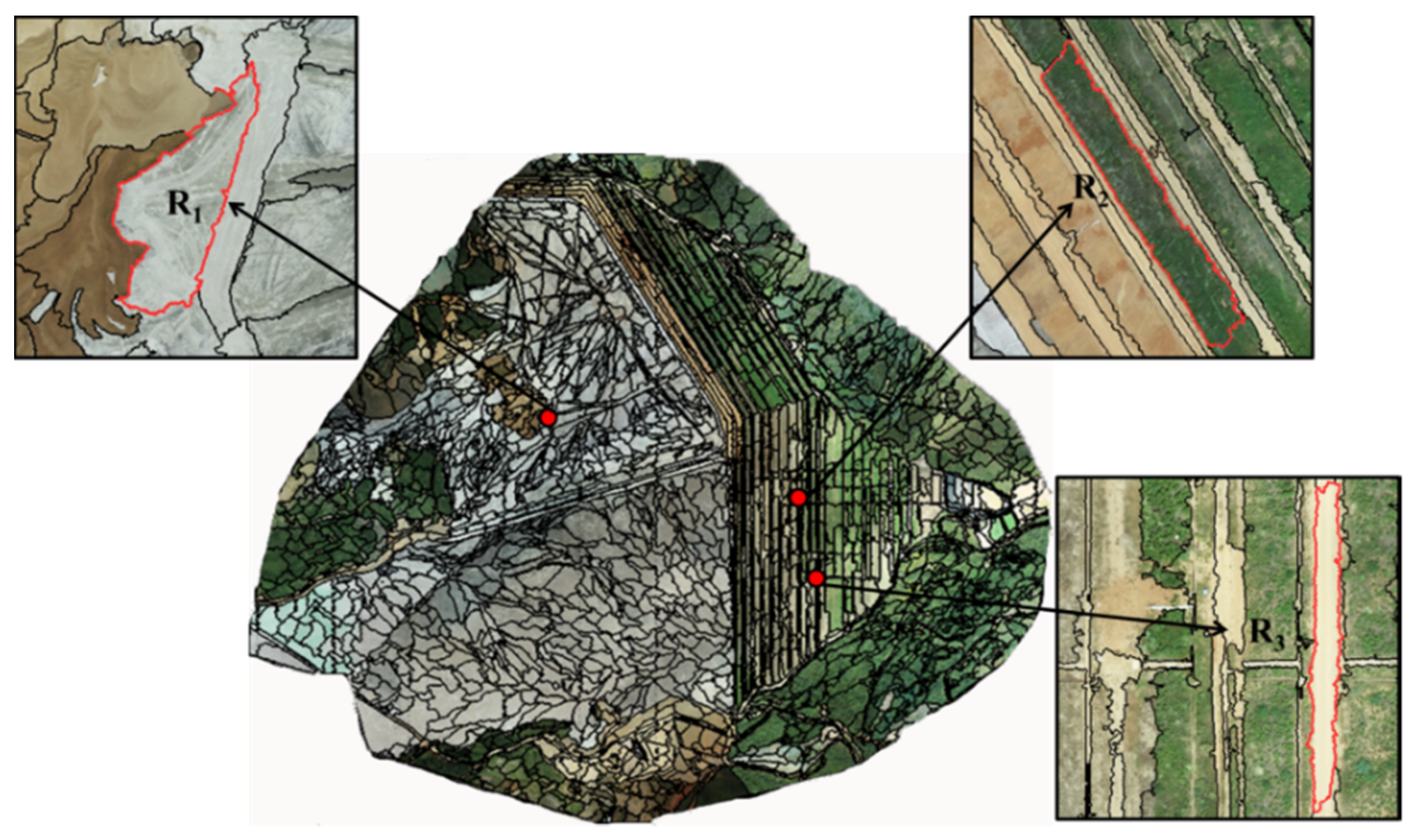
3.1. Segmentation and Classification
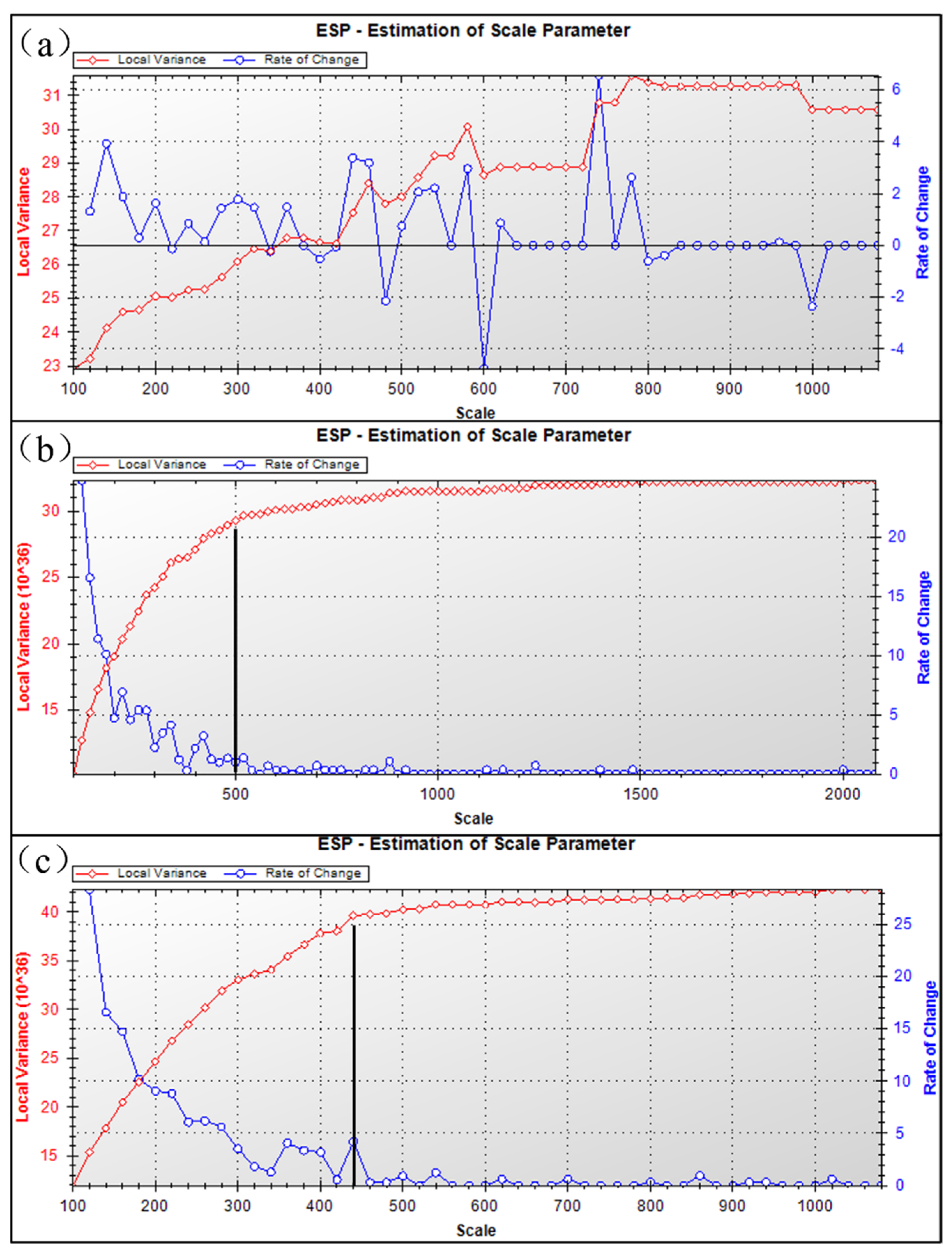
3.1.1. Optimal Segmentation Scale
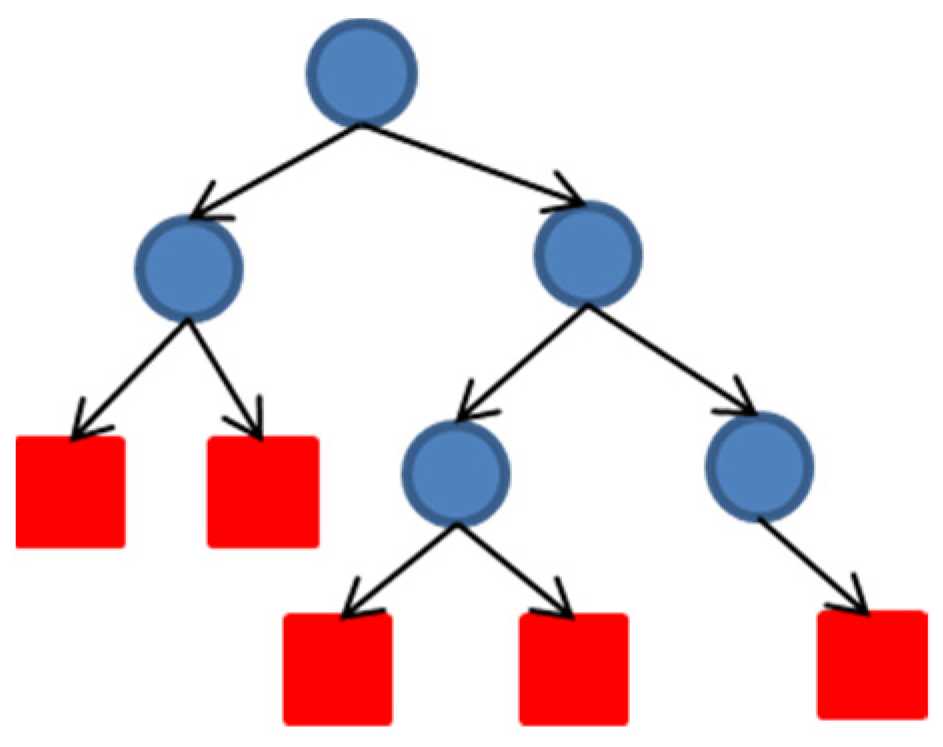
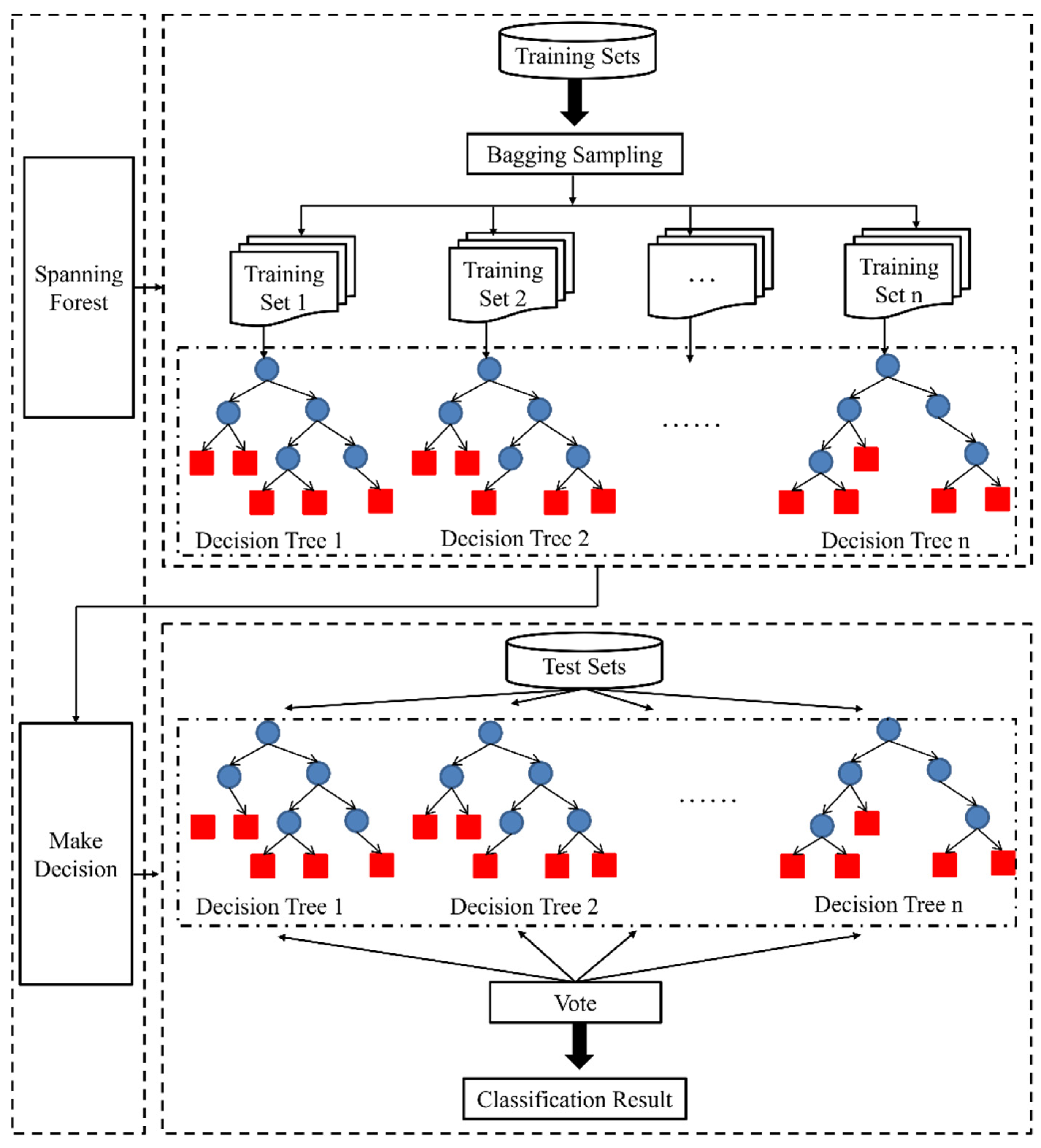
3.1.2. Random Forest (RF)
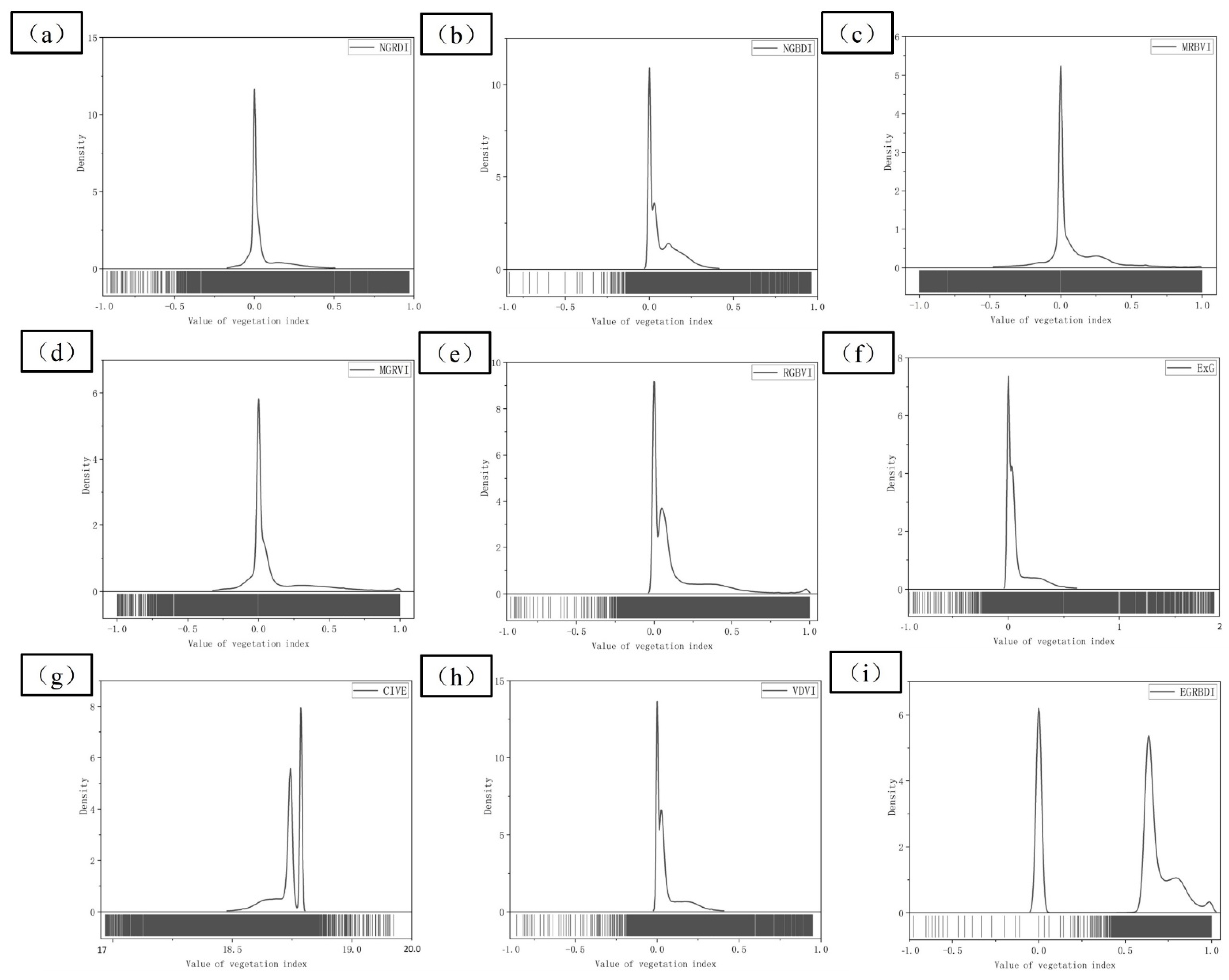
3.2. Vegetation Index of Visible Band
3.3. Precision Evaluation
4. Test and Result Analysis
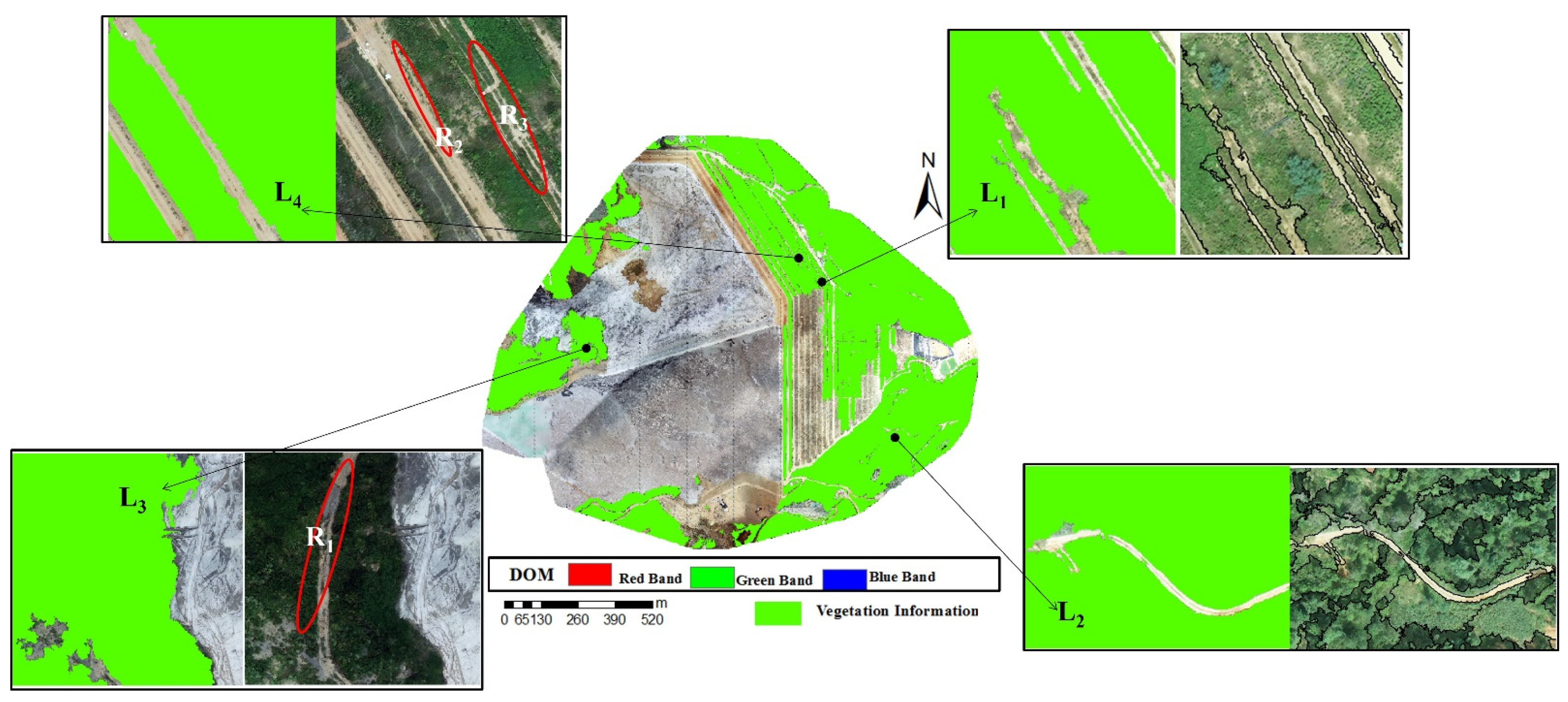
4.1. Extraction of Vegetation Information from 2D Images
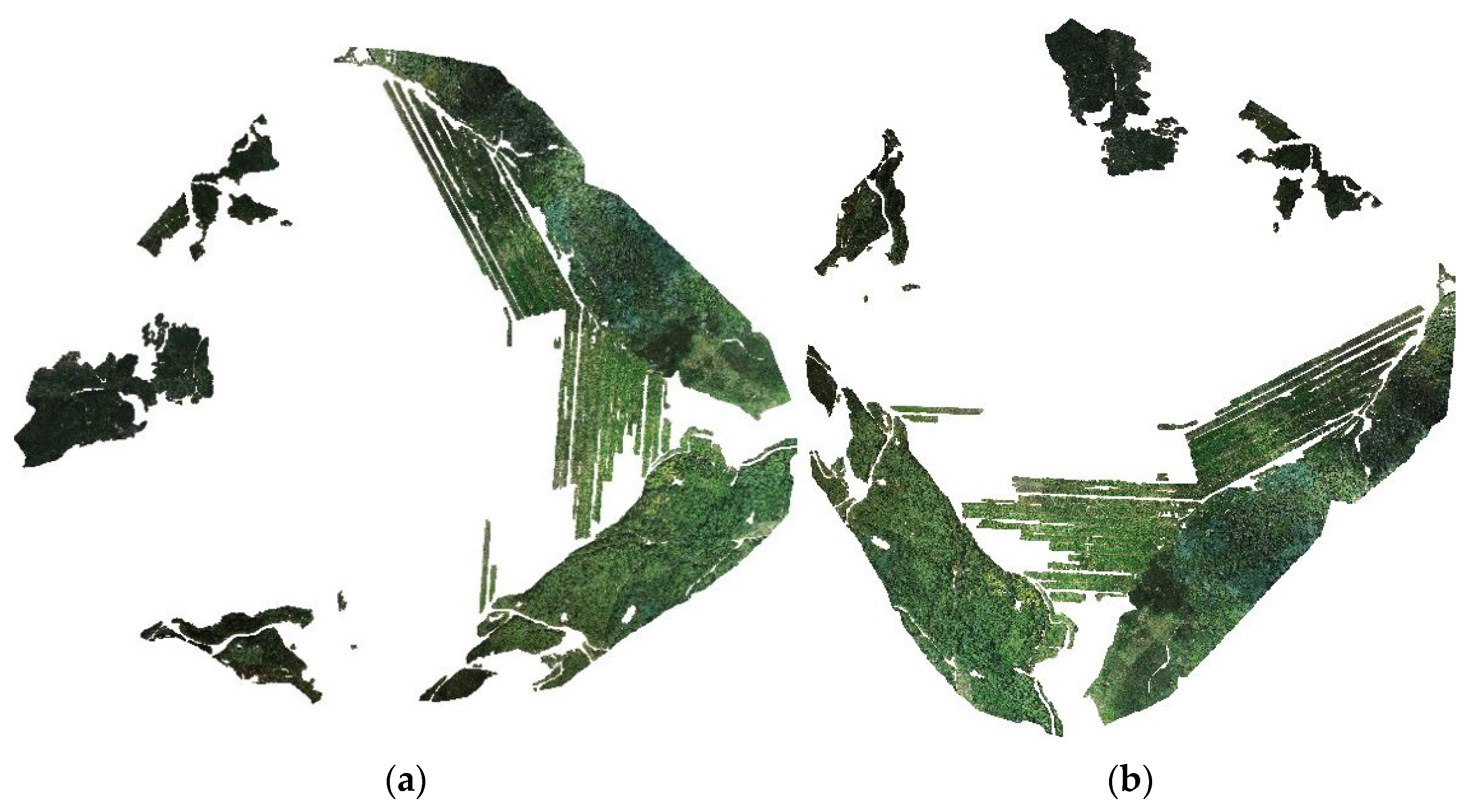
4.2. 2D Image Vegetation Information and 3D Point Cloud Mapping
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Jianjun, C. Research on change of fractional vegetation cover of alpine grass land and its environmental impact factors on the Qinghai-Tibetan Plateau. Acta Geod. Cartogr. Sin. 2020, 49, 533. [Google Scholar]
- Wu, L.; Wang, S.; Yang, R. Spatio-temporal patterns and differentiations of habitat quality for Asian elephant (Elephas maximus) habitat of Sri Lanka. Natl. Remote Sens. Bull. 2021, 25, 2472–2487. [Google Scholar]
- He, H.; Yan, Y.; Ling, M. Extraction of soybean coverage from UAV images combined with 3D dense point cloud. Trans. Chin. Soc. Agric. Eng. 2022, 38, 201–209. [Google Scholar]
- Yang, X.; Zhu, D.; Yang, R. Method for extracting UAV RGB image information based on matching point cloud and HSI color component. Trans. Chin. Soc. Agric. Eng. 2021, 37, 295–301. [Google Scholar]
- Li, P.; Guo, X.; Gu, Q. Vegetation coverage information extraction of mine dump slope in Wuhai City of Inner Mongolia based on visible vegetation index. J. Beijing For. Univ. 2020, 42, 102–112. [Google Scholar]
- Xie, B.; Yang, W.; Wang, F. A new estimation method for fractional vegetation cover based on UAV visual light spectrum. Sci. Surv. Mapp. 2020, 45, 72–77. [Google Scholar] [CrossRef]
- Wang, M.; Yang, J.; Sun, Y. Remote sensing rapid extraction technology for abandoned mine vegetation coverage via UAV. Sci. Soil Water Conserv. 2020, 18, 130–139. [Google Scholar] [CrossRef]
- Tong, S. Geological characteristics and prospecting criteria of phosphorite block in Dianchi area, Yunnan Province. Res. Inform. Eng. 2019, 34, 29–32. [Google Scholar] [CrossRef]
- Cui, Y.; Huang, H.; Liu, X.; Luo, D. Building facade classifying and DIM point cloud filtering. Bull. Surv. Mapp. 2021, 3, 55–59. [Google Scholar] [CrossRef]
- Abdel-Aziz, Y.I.; Karara, H.M.; Hauck, M. Direct Linear Transformation from Comparator Coordinates into Object Space Coordinates in Close-Range Photogrammetry. Photogramm. Eng. Remote Sens. 2015, 81, 103–107. [Google Scholar] [CrossRef]
- Fang, W.; Huang, X.; Li, D. Intensity correction of terrestrial laser Scanning Data by estimating laser transmission function. IEEE Trans. Geosci. Remote Sens. 2015, 53, 942–951. [Google Scholar] [CrossRef]
- Huang, H.P.; Wu, B.F.; Li, M.M.; Zhou, W.F.; Wang, Z.W. Detecting Urban Vegetation Efficiently with High Resolution Remote Sensing Data. J. Remote Sens. 2004, 8, 68–74. [Google Scholar]
- Huang, H.; Wu, B. Analysis to the Relationship of Feature Size, Objects Scales, Image Resolution. Remote Sens. Technol. Appl. 2006, 21, 243–248. [Google Scholar]
- Huai, T.; Zhao, J.; Cao, F. A classification algorithm for white blood cells based on the synthetic feature and random forest. J. China Jiliang Univ. 2015, 26, 474–479. [Google Scholar]
- Guo, Y.; Wang, H.; Wu, Z.; Wang, S.; Sun, H.; Senthilnath, J.; Wang, J.; Bryant, C.R.; Fu, Y. Modified Red Blue Vegetation Index for Chlorophyll Estimation and Yield Prediction of Maize from Visible Images Captured by UAV. Sensors 2020, 20, 5055. [Google Scholar] [CrossRef] [PubMed]
- Saponaro, M.; Agapiou, A.; Hadjimitsis, D.G.; Tarantino, E. Influence of Spatial Resolution for Vegetation Indices ‘Extraction Using Visible Bands from Unmanned Aerial Vehicles’ Orthomosaics Datasets. Remote Sens. 2021, 13, 3238. [Google Scholar] [CrossRef]
- Sha, G.A.O.; Xiping, Y.U.A.N.; Shu, G.A.N.; Minglong, Y.A.N.G.; Xinyue, Y.U.A.N.; Weidong, L.U.O. Fusion of UAV image and LiDAR point cloud to study the detection technology of mountain surface cover landscape characteristics. Bull. Surv. Mapp. 2022, 1, 110–115. [Google Scholar] [CrossRef]
- Meyer, G.E.; Neto, J.C. Verification of color vegetation indices for automated crop imaging applications. Comput. Electron. Agric. 2008, 63, 282–293. [Google Scholar] [CrossRef]
- Hunt, E.R.; Cavigelli, M.; Daughtry, C.S.T.; Mcmurtrey, J.E.; Walthall, C.L. Evaluation of Digital Photography from Model Aircraft for Remote Sensing of Crop Biomass and Nitrogen Status. Precis. Agric. 2005, 6, 359–378. [Google Scholar] [CrossRef]
- Bendig, J.; Yu, K.; Aasen, H.; Bolten, A.; Bennertz, S.; Broscheit, J.; Gnyp, M.L.; Bareth, G. Combining UAV-based plant height from crop surface models, visible, and near infrared vegetation indices for biomass monitoring in barley. Int. J. Appl. Earth Obs. Geoinf. 2015, 39, 79–87. [Google Scholar] [CrossRef]
- Gao, Y.; Lin, Y.; Wen, X.; Jian, W.; Gong, Y. Vegetation information recognition in visible band based on UAV images. Trans. Chin. Soc. Agric. Eng. 2020, 36, 178–189. [Google Scholar]
- Torres-Sánchez, J.; Peña, J.M.; De Castro, A.I.; López-Granados, F. Multitemporal mapping of the vegetation fraction in early-season wheat fields using images from UAV. Comput. Electron. Agric. 2014, 103, 104–113. [Google Scholar] [CrossRef]
- Kataoka, T.; Kaneko, T.; Okamoto, H.; Hata, S. Crop growth estimation system using machine vision. In Proceedings of the 2003 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM 2003), IEEE, Kobe, Japan, 20–24 July 2003; Volume 2, pp. b1079–b1083. [Google Scholar]
- Wu, J.; Liu, X.; Bo, Y. Plastic greenhouse recognition based on GF-2 data and multi-texture features. Trans. Chin. Soc. Agric. Eng. 2019, 35, 173–183. [Google Scholar]
- Zhang, R.; Li, G.; Li, M.; Wang, L. Fusion of images and point clouds for the semantic segmentation of large-scale 3D scenes based on deep learning. ISPRS J. Photogramm. Remote Sens. 2018, 143, 85–96. [Google Scholar] [CrossRef]
- Yao, J.; Zhang, D. Improvement of the direct-solution of spatial-resection. J. Shandong Univ. Technol. (Nat. Sci. Ed.) 2005, 19, 6–9. [Google Scholar]
- Yao, J.; Zhang, Y.; Wang, S. The direct solution of spatial resection based on luodigues matrix. J. Shandong Univ. Technol. (Nat. Sci. Ed.) 2006, 20, 36–39. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Comparative Indices | LiDAR Point Cloud | DIM Point Cloud |
|---|---|---|
| Data acquisition method | Lidar sweeps | UAV photography and image intensive matching |
| Influence factors | Scanning mode and actual occlusion | Image quality and matching accuracy |
| Point cloud data integrity | Generally, there is an object block easy to appear empty | Preferably |
| Color information | Without | Possess |
| Density | Low | High |
| Standard Deviation | Little | Big |
| Echo frequency and intensity | Possess | Without |
| Scanline information | Possess | Without |
| Name | VI | Equation | Range Theory |
|---|---|---|---|
| Normalized green-red difference index | NGRDI [18] | [−1, 1] | |
| Normalized green-blue difference index | NGBDI [19] | [−1, 1] | |
| Modified red and blue vegetation index | MRBVI [15] | [−1, 1] | |
| Modified green red index | MGRVI [20] | [−1, 1] | |
| Red, green, and blue vegetation index | RGBVI [21] | [−1, 1] | |
| Extreme green index | ExG [22] | [−1, 2] | |
| Color index of vegetation extraction | CIVE [23] | [17, 20] | |
| Visible band difference vegetation index | VDVI [17] | [−1, 1] | |
| Excess green–red–blue difference index | EGRBDI [21] | [−1, 1] |
| Name | Error | Vegetation | Bare Land | Tailing Sand | Water Body | Range Value |
|---|---|---|---|---|---|---|
| NGRDI | Mean Std | 0.01 0.085 | −0.05 0.027 | 0.01 0.013 | 0.12 0.08 | [−1, 1] |
| NGBDI | Mean Std | 0.12 0.084 | 0.15 0.034 | 0.03 0.014 | 0.05 0.08 | [−1, 1] |
| MRBVI | Mean Std | 0.23 0.145 | 0.39 0.105 | 0.04 0.053 | −0.14 0.144 | [−1, 1] |
| MGRVI | Mean Std | 0.01 0.148 | −0.10 0.053 | 0.03 0.057 | 0.23 0.147 | [−1, 1] |
| RGBVI | Mean Std | 0.13 0.128 | 0.10 0.021 | 0.05 0.007 | 0.16 0.127 | [−1, 1] |
| ExG | Mean Std | 0.08 0.122 | 0.05 0.014 | 0.03 0.005 | 0.11 0.121 | [−1, 1] |
| CIVE | Mean Std | 18.7 0.052 | 18.7 0.006 | 18.8 0.002 | 18.7 0.05 | [18, 19] |
| VDVI | Mean Std | 0.04 0.075 | 0.04 0.010 | 0.02 0.003 | 0.08 0.07 | [−1, 1] |
| EGRBDI | Mean Std | 0.68 0.063 | 0.66 0.012 | 0.63 0.004 | 0.69 0.06 | [0, 1] |
| Name | n − Estimators | max − Depth | max − Features | min − Samples − Split |
|---|---|---|---|---|
| Coarse values | 71 | 15 | 0.1 | 2 |
| Optimized values | 75 | 16 | 0.1 | 3 |
| Error Matrix Based on Sample | Vegetation | Bare Land | Tailing Sand | Water Body | Total |
|---|---|---|---|---|---|
| Vegetation | 83 | 1 | 0 | 0 | 84 |
| Bare land | 4 | 95 | 0 | 0 | 99 |
| Tailing sand | 0 | 0 | 60 | 0 | 60 |
| Water body | 0 | 0 | 1 | 7 | 8 |
| Total | 87 | 96 | 61 | 7 | |
| Accuracy | |||||
| PA | 0.954 | 0.989 | 0.983 | 1 | |
| UA | 0.988 | 0.959 | 1 | 0.875 | |
| OA | 0.976 | ||||
| Kappa | 0.965 | ||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Luo, W.; Gan, S.; Yuan, X.; Gao, S.; Bi, R.; Hu, L. Test and Analysis of Vegetation Coverage in Open-Pit Phosphate Mining Area around Dianchi Lake Using UAV–VDVI. Sensors 2022, 22, 6388. https://doi.org/10.3390/s22176388
Luo W, Gan S, Yuan X, Gao S, Bi R, Hu L. Test and Analysis of Vegetation Coverage in Open-Pit Phosphate Mining Area around Dianchi Lake Using UAV–VDVI. Sensors. 2022; 22(17):6388. https://doi.org/10.3390/s22176388
Chicago/Turabian StyleLuo, Weidong, Shu Gan, Xiping Yuan, Sha Gao, Rui Bi, and Lin Hu. 2022. "Test and Analysis of Vegetation Coverage in Open-Pit Phosphate Mining Area around Dianchi Lake Using UAV–VDVI" Sensors 22, no. 17: 6388. https://doi.org/10.3390/s22176388
APA StyleLuo, W., Gan, S., Yuan, X., Gao, S., Bi, R., & Hu, L. (2022). Test and Analysis of Vegetation Coverage in Open-Pit Phosphate Mining Area around Dianchi Lake Using UAV–VDVI. Sensors, 22(17), 6388. https://doi.org/10.3390/s22176388