1. Introduction
Marine vessels, such as submarines and ships, consist of ferromagnetic material which can disturb the Earth’s magnetic field [
1,
2]. The significance of a marine vessel’s magnetic field has been proverbial since Germany blockaded Britain with magnetic naval mines, causing great losses to the British Navy in World War II. Magnetic silencing facilities (MSF) are utilized to reduce the risk of damaging submarines and ships from mines and the magnetic airborne detection [
3]. Its key elements are magnetic sensor arrays on the seafloor, whose efficacious performance depends on the accuracy of the sensors installed and the accuracy of locating the sensors after installation [
4]. According to the technique of installing sensors, the magnitude of the position deviation vector in the three-axis direction is no more than 30 cm, which could bring magnetic field errors more than 100 nT and have repercussions for the magnetic assessment of marine vessels. The existence of the position deviations directly reduces the accuracy of the ship’s measured magnetic field and affects the assessment of the ship’s magnetic protection capability.
For the magnetic silencing facilities, underwater sensors are installed at a depth of 15~20 m from the pier plane, where a high-sensitivity GPS hardly works in the sea as it is incompatible with water [
5,
6,
7]. In addition, due to seaweed organisms, accumulated sediment and murky water, there are complex conditions in seafloor environments. Therefore, it is difficult to provide precision with the localization methods which use both acoustic and optical signals [
8]. Comparatively, using a magnetic signal is more useful in a shallow maritime environment with the advantage of energy efficiency and low cost. Many methods have explored how to locate underwater sensors [
9,
10]. Callmer explored a method to locate underwater sensors by using an extended Kalman Filter and a vessel with known static magnetic signature, but it is hard to obtain highly accurate data for the ragged static magnetic signature [
11]. Yang proposed a method to simplify the 3D position problem into 2D problem by using depth sensors, then it was optimized [
12]. Zhang investigated a method which equipped the underwater sensors with auxiliary coils [
13]. Both of these methods require the installation of auxiliary components and would thus be expensive. Cerro proposed a magnetic localization approach by means of TMR triaxial sensors on a finite domain, whose results place the measurement accuracy lower than 1 cm when the localization range is a cube of 30 cm. However, the uniaxial (
z axis) magnetic sensors are still widely applied in the magnetic silencing facility [
14]. Yu proposed a method which used an improved non-dominated sorting genetic algorithm and linear multi-metering method to locate the triaxial sensors by building a magnetic source with known positions and magnetic moment [
15].
In this paper, a localization approach based on magnetic field gradients (MFG) is proposed to determine the positions of the magnetic source in the inverse problem of localization. Firstly, a suitable length is set as the grid spacing and meshes the measurement plane. The magnetic field of the region centered on the sensor is calculated when the magnetic source is placed at every grid node, then the average gradients of the magnetic field in the three-axis directions are calculated. By using the average gradients, the positions of the magnetic source are determined and the overdetermined system of the equation is established. Through optimization algorithms, the sensor positions are determined.
The arrangement of this paper is organized as follows. In
Section 2, we discuss how to simplify the magnetic source and present the localization approach based on the magnetic field gradients. In
Section 3, the localization approach applied in the typical facility is analyzed and verified by numerical experiments. In
Section 4, the experiments are carried out. Finally, we draw a conclusion in
Section 5.
2. Localization Model and Approach
2.1. Magnetic Dipole Source
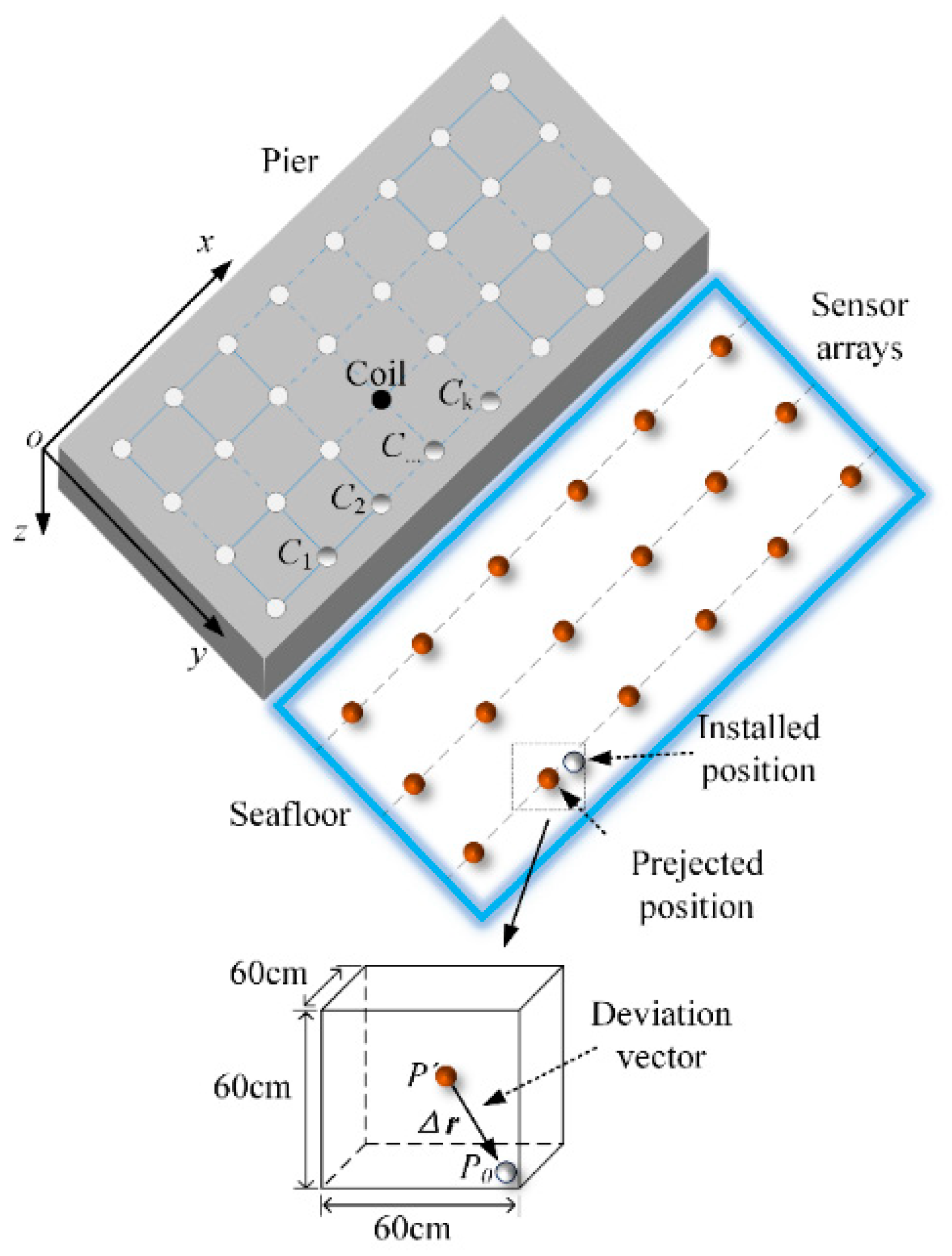
Figure 1 shows section view of the magnetic silencing facility, where the sensor arrays are arranged at the bottom of the sea and the solenoid coil carrying direct current (magnetic source) is located on the plane of the pier. One of the vertices of the plane on the pier is set as the original point
o of the global coordinate system
o-
xyz and the center of the solenoid coil is set as the original point
o′ of the solenoid coil coordinate system
o′
-x′
y′
z′.
In the solenoid coil system, the magnetic flux density
B = [
Bx,
By,
Bz]
T is generated by the solenoid coil, which is a high-order nonlinear function of the sensor position
P = [
px,
py,
pz]
T with three variables. Additionally, the magnetic flux density
B = [
Bx,
By,
Bz]
T in the sensor position
P = [
px,
py,
pz]
T created by the solenoid coil could be exported as follows [
16]:
where
μ0 is the magnetic permeability of vacuum (
μ0 = 4π × 10
−7),
R is the coil radius,
I is the direct current loaded,
Nw is the number of solenoid coil turns,
r is the distance between the sensor position
P and the solenoid coil center
o′,
e′
x,
e′
y and
e′
z are the base vectors of the coil coordinate system, and
During the calculation and iteration, the calculation of calculus such as Equation (1) in each circulation is very time-consuming. If the distance
r between the center of the coil and the sensor position is large enough in comparison with the coil radius
R [
17], the solenoid coil could be simplified as a magnetic dipole source within the allowable range of errors. The uniaxial (
z axis) magnetic sensors are still widely applied in the military facilities. Therefore, the vertical component of the magnetic flux density
Bz is used to determine the localization approach in this paper. Additionally, the vertical component of magnetic flux density
Bz in the sensor position
P = [
px,
py,
pz]
T by the magnetic dipole source is exported as follows [
18]:
where
m = [
mx,
my,
mz] is the magnetic dipole moment. To facilitate the implementation of the localization approach, the size of the magnitude of the magnetic dipole moment
m is optimized. Maximizing
m within the allowable range of the magnetic dipole errors is preferred for localization. The uniaxial (
z axis) magnetic sensors are still widely applied in the military facilities. Therefore, the vertical component of magnetic flux density
Bz is used for the localization approach in this paper. By changing the positions of the magnetic source, underwater sensors measure the magnetic field with different values and the system of equations is established.
2.2. Localization Approach
The magnetic dipole moment
m could be obtained by measurement and inversion, when the sensor position
P = [
px,
py,
pz]
T is determined accurately as the installed position. the vertical component of the magnetic flux density
Bz computed by Equation (3) is the same as the measured magnetic data
Bzm by the sensor. Therefore, localization uses the measured magnetic data
Bzm to solve the inverse problem:
The essence of localization is minimizing the difference in the computed magnetic data
Bz and the measured magnetic data
Bzm to determine the sensor position
P = [
px,
py,
pz]
T. However, considering the fact that Equation (3) is a function of the sensor position
P = [
px,
py,
pz]
T with three variables, a minimum of three equations are required to solve the sensor position and form the well-posed system of equations. Generally, the overdetermined system of equations is established to improve the accuracy of localization. The systems are defined as:
where
Bz = [
Bz1,
Bz2,
Bz3,…,
Bzi] is the calculated magnetic data and
Bzm = [
Bzm1,
Bzm2,
Bzm3,…,
Bzmi] is the measured magnetic data when the coil is placed in different positions. Generally, a linear multi-metering method (LMM) from a latest research study [
15] can be applied, as illustrated in
Figure 2. The coil moves discontinuously from
C1 to
Ck along a straight line and a set of magnetic field data is measured simultaneously.
In order to acquire more accurate positions of sensors with minimal cost, an approach based on magnetic field gradients (MFG) is proposed to determine the positions of the magnetic source, as shown in
Figure 2. Firstly, the plane of the pier is divided into fixed-size grids with an appropriate grid spacing. Considering the fact that the magnitude of the position deviation vector in the three-axis direction is no more than 30 cm, the average magnetic field gradients in the
x-axis,
y-axis and
z-axis directions of the region 60 × 60 × 60 cm centered on the sensor is calculated, respectively, when the magnetic source is placed at every grid node. Simultaneously, the coil coordinates are recorded. Then, the average gradients of magnetic field in the three directions are sorted from large to small, respectively as
Gx = [
Gx1,
Gx2,
Gx3, …] (
Gx1 is the largest value in the sorting in
x-axis direction and so on),
Gy = [
Gy1,
Gy2,
Gy3, …] and
Gz = [
Gz1,
Gz2,
Gz3, …]. The positions of the magnetic source are determined according to the gradients and the request of accuracy. When only three measurements can reach the request of localization, the coil coordinates corresponding to the average magnetic field gradients
G1 = [
Gx1,
Gy1,
Gz1] are determined, respectively. If six measurements are found, it corresponds to
G2 = [
Gx1,
Gy1,
Gz1,
Gx2,
Gy2,
Gz2], and so on.
Finally, the system of equations could be solved by optimization algorithms, such as a novel multi-swarm particle swarm optimization with dynamic learning strategy [
19]. The selection of optimization algorithms has two traits. One is including avoiding falling into local optimality and another is reducing the time of optimization. Then, the accurate positions of sensors could be obtained.
3. Numerical Experiments
In this section, a numerical simulation experiment platform is built according to the typical magnetic silencing facility shown in
Figure 2, which shows a two-dimensional cross section view of the typical magnetic silencing facility, where the sensors with a depth of 15 m can be divided into two position types. The first and second position types are 4 m and 10 m away from the pier, respectively.
In addition, the first and second position types are called type 1 and 2, respectively. In part A, the localization approach proposed is compared to the linear multi-metering method. Then, the grid spacings and the number of magnetic source positions are analyzed. Numerical experiments with different position deviation vectors are carried out in part B.
3.1. Analysis of Different Grid Spacings and Number of Magnetic Source Positions
In the experiments, considering the magnetic dipole equivalent errors, the magnetic dipole moment
m is set as 31,415 A·m
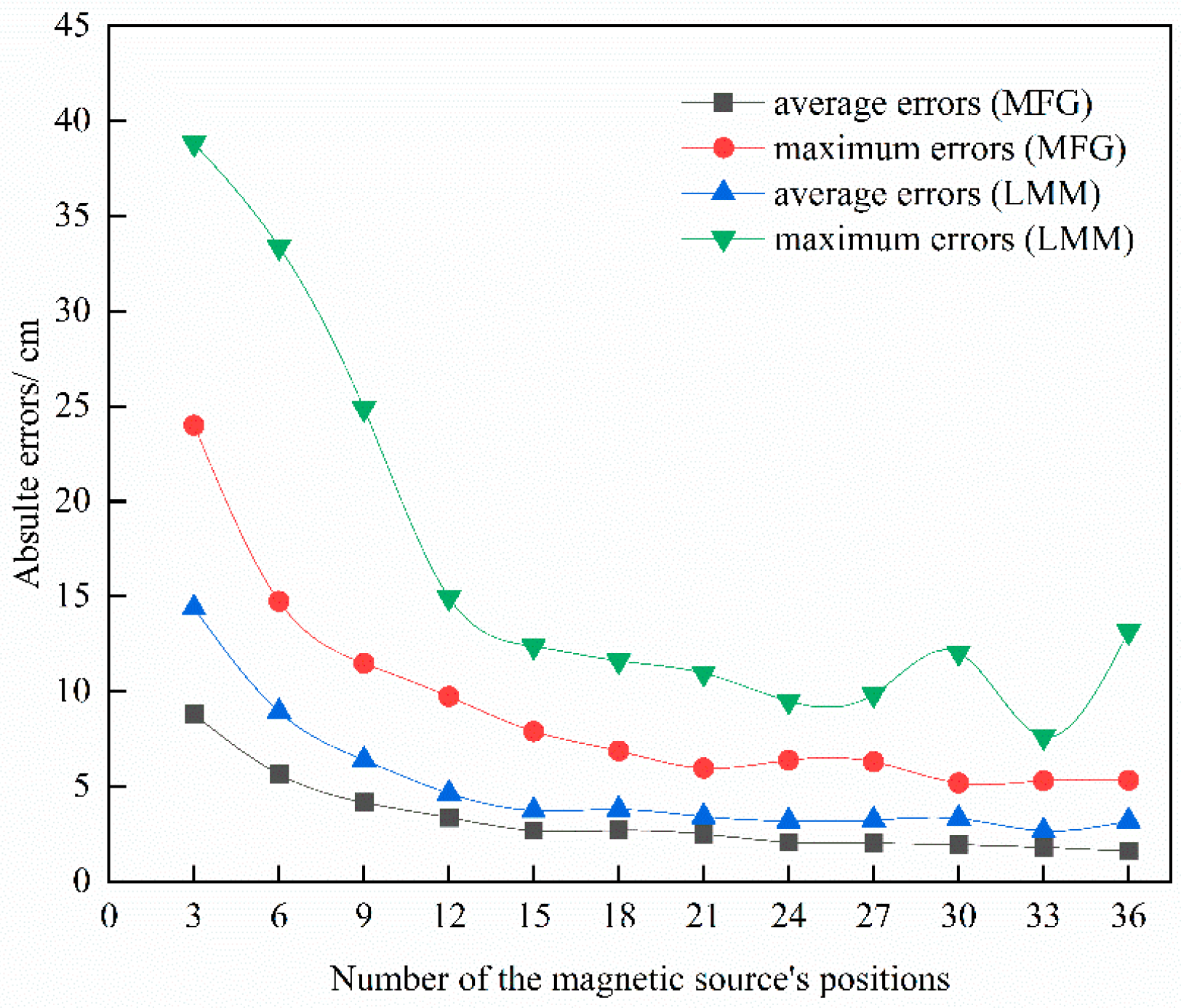
2. The size of the pier’s plane is 10 × 60 m and its z coordinate is 0 m. Simultaneously, considering the actual situation of the facility with a “drive-in” system, the measurement noise and resolution of underwater sensors are 10 nT and 1 nT, respectively. Firstly, the linear multi-metering method (LMM) is applied to the localization of type 2 for comparison with the localization approach proposed in this paper, as shown in
Figure 3. The grid spacing is set as 2 m, the position deviation vector is set as (30, 30, 30) with the unit of centimeter. The absolute error and its relative error are defined as follows:
where
P (
px,
py,
pz) is the position to be determined and
P0 (
px0,
py0,
pz0) is its installed position of the sensor.
Figure 3 shows the location results of MFG and LMM. Clearly, as the number increases, all errors are gradually reduced. Compared with LMM, the location results using MFG are more accurate and could achieve up to a 10 cm positioning error.
For the location process clear,
Figure 4a–c shows when the number of the magnetic source positions is set as 9, three groups of coordinates of the magnetic source are determined by magnetic field gradients in the three directions of
x,
y and
z axes, respectively. In addition, the three groups of coordinates are marked with
x coordinates,
y coordinates and magnetic field gradients.
Figure 4d shows the coordinates of the magnetic source of MFG and LMM, wherein the six coordinate points are coincident and only the remaining three are different, but the location accuracy varies.
In order to analyze the impact of the grid spacings and the number of the magnetic source’s positions, the grid spacings are set as 1 m, 2 m, 3 m, 4 m and 5 m and the number of the magnetic source’s positions is set as 3 to 36 with an interval of 3, successively.
Table 1 and
Table 2 show the average absolute errors and maximum absolute errors, respectively. Both kinds of errors decrease with added measurement points and descend into a saturation phase in the end. Overall, with the grid spacings from 1 to 5 m, the location errors show small differences. Type 1 and type 2 could achieve up to 5 cm and 10 cm location errors, respectively. Compared with type 2, the results of type 1 show more accurate data for a closer distance.
3.2. Numerical Experiments
Different deviation vectors are set to test the localization approach proposed in this paper. Due to the limitation of space and instruments in the laboratory, the grid spacing is set as 2 m and the number of the magnetic source’s positions is set as 12. In addition, five deviation vectors of 30 cm are set and the numerical experiments of localization are carried out.
Table 3 shows results of localization of two sensors by MFG and LMM. Compared with LMM, the results using MFG are more accurate, especially in the maximum absolute errors (
dr-max). Both of the average absolute errors have a weak difference, near 1 cm, but their difference in the maximum absolute errors could reach about 5 cm.
In the approach proposed, for the type 1 sensor, the average absolute error and the maximum absolute error fluctuate around 3.2 cm and 9.5 cm, respectively. For the type 2 sensor, the average absolute error and the maximum absolute error fluctuate around 6.6 cm and 19.3 cm, respectively. Facing different deviation vectors, the localization approach is accurate.
4. Model Experiment
To validate the practical feasibility of the localization approach proposed in this paper, the physical scale model experiments are carried out as shown in
Figure 5.
Considering the laboratory limitations, the scale of the model is set as 1:8.5 and only the type 2 sensor is located. In addition, the number of the magnetic source positions is set as 12. There were five position deviation states set and the error amplitude was set as 3 cm. The coil radius R is 0.1 m, which is less than one-fifth of the distance between the center of the coil and the sensor position. The resolution and the range of the magnetic sensors were 1 nT and ±60 μT, respectively.
Table 4 shows the result of the experiments. The absolute position error using LMM is about 1.2 cm and its relative error is 0.6 %. The absolute position error using MFG is about 0.87 cm and its relative error is 0.4 %. Compared with LMM, the results show that the proposed approach is more accurate, which is consistent with the results of the numerical experiments outlined above and validates the practical feasibility of the localization approach. When zooming in proportionally, its absolute position error is 10.2 cm, which is near 10 cm and thus meets the magnetic field measurement requirements of ferromagnetic ships.
5. Conclusions
A localization approach based on the optimization of magnetic field gradients has been proposed to determine the sensors’ positions in the inverse problem of localization. The plane of the pier is fixed-size grids with a fit spacing. Then, by calculating the gradients of the vertical component of the magnetic field in the region centered on the sensor, the positions of the measurement points are determined according to the gradients in the x-axis, y-axis and z-axis directions, respectively. The position vector of the sensor is determined by a novel multi-swarm particle swarm optimization with dynamic learning strategy. The experimental results show that the proposed strategy based on the optimization of magnetic field gradients (MFG) is effective. Its high accuracy of position type 1 and 2 has also been validated. Compared to LMM, the model results show that the absolute position error of position type 2 could reach 10 cm in a practical use scenario.
In this paper, three groups of coordinates of the magnetic source are determined by magnetic field gradients in the three directions of the x, y and z axes to build the system of equations and improve the accuracy of localization, which has a great effect. Next, we intend to structure the magnetic sources to improve the magnetic field gradients to further promote the accuracy of localization.
Author Contributions
Funding acquisition, K.W.; Methodology, H.W.; Writing—original draft, Y.W.; Writing—review & editing, G.Z. All authors have read and agreed to the published version of the manuscript.
Funding
This work was supported by the National Natural Science Foundations of China (Grant no. 51107145) and the National Natural Science Foundations of China (Grant no. 51377165).
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Acknowledgments
The authors would like to thank the anonymous reviewers for their helpful suggestions and comments on a previous version of the present paper.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Holmes, J.J. Reduction of a Ship’s Magnetic Field Signatures; Morgan & Claypool: Williston, VT, USA, 2008; pp. 1–2. [Google Scholar]
- Holmes, J.J. Modeling a Ship’s Ferromagnetic Signatures; Morgan & Claypool: Williston, VT, USA, 2007; pp. 1–2. [Google Scholar]
- Schulze, C.; Chan, D.; Funasaki, E.; Wong, K. Case Study of a Navy Magnetic Silencing Facility. In Ports 2010: Building on the Past, Respecting the Future; ASCE: Pittsburgh, PA, USA, 2010; pp. 1326–1335. [Google Scholar] [CrossRef]
- Isa, M.C.; Nain, H.; Yusoff, N.H.N.; Manap, A.R.A.; Slamatt, R.; Anuar, M.H. An overview of ship magnetic signature and silencing technologies. Def. S T Tech. Bull. 2019, 12, 176–192. [Google Scholar] [CrossRef]
- Chandrasekhar, V.; Seah, W.K.; Choo, Y.S.; Ee, H.V. Localization in underwater magnetic sensor networks: Survey and challenges. In Proceedings of the 1st ACM International Workshop on Underwater Networks, Los Angeles, CA, USA, 25 September 2006; pp. 33–40. [Google Scholar] [CrossRef]
- Pasku, V.; De Angelis, A.; De Angelis, G.; Arumugam, D.D.; Dionigi, M.; Carbone, P.; Moschitta, A.; Ricketts, D.S. Magnetic Field-Based Positioning Systems. IEEE Commun. Surv. Tutor. 2017, 19, 2003–2017. [Google Scholar] [CrossRef]
- Ivry, A.; Fisher, E.; Alimi, R.; Mosseri, I.; Nahir, K. Multiclass Permanent Magnets Superstructure for Indoor Localization Using Artificial Intelligence. IEEE Trans. Magn. 2022, 58, 1–6. [Google Scholar] [CrossRef]
- Hott, M.; Harlakin, A.; Hoeher, P.A. Hybrid Communication and Localization Underwater Network Nodes based on Magnetic Induction and Visible Light for AUV Support. In Proceedings of the 2020 International Conference on Information and Communication Technology Convergence (ICTC), Jeju Island, Korea (South), 21–23 October 2020; pp. 66–68. [Google Scholar] [CrossRef]
- Yu, H.; Bo-Wen, W.; Li-Hua, W. Theoretical Investigation on the Linear Location Algorithm of the Magnetic Gradient Tensor Ranging by Use of Cuboid Triaxial Magnetic Array. IEEE Trans. Magn. 2021, 57, 1–11. [Google Scholar] [CrossRef]
- Huang, H.; Zheng, Y. 3-D localization of wireless sensor nodes using near-field magnetic-induction communications. Phys. Commun. 2018, 30, 97–106. [Google Scholar] [CrossRef]
- Callmer, J.; Skoglund, M.; Gustafsson, F. Silent localization of underwater sensors using magnetics. EURASIP J. Adv. Signal Process. 2010, 2010, 1–8. [Google Scholar] [CrossRef]
- Yang, M.; Liu, D.; Lian, L.; Zhang, C. Underwater Vector-magnetic Located by Using Magnetic Dipole Sources in the Offing. J. Detect. Control 2011, 33, 41–45. [Google Scholar] [CrossRef]
- Zhang, C.; Xiao, C. Simulation Experiment Research for Magnetic Localization Method for Magnetic Sensor at Seabed. J. Shanghai Jiaotong Univ. 2011, 45, 826–830. [Google Scholar]
- Cerro, G.; Ferrigno, L.; Laracca, M.; Milano, F.; Bellitti, P.; Serpelloni, M.; Casas Piedrafita, O. On a finite domain magnetic localization by means of TMR triaxial sensors. In Proceedings of the 2020 IEEE International Instrumentation and Measurement Technology Conference (I2MTC), Dubrovnik, Croatia, 25–28 May 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Yu, Z.; Xiao, C.; Zhou, G. ; Zhou, G. Multi-Objectivization-Based Localization of Underwater sensors Using Magnetics. IEEE Sens. J. 2014, 14, 1099–1106. [Google Scholar] [CrossRef]
- Lehner, G. Basics of magnetics. In Electromagnetic Field Theory for Engineers and Physicists; Horrer, M., Ed.; Springer: Berlin, Germany, 2010; pp. 256–283. [Google Scholar]
- Liu, F.Y.; Yan, B. Applicability and optimization analysis of magnetic dipole array model. Acta Phys. Sin. 2022, 71, 124101. [Google Scholar] [CrossRef]
- Zhang, C.; Yu, W. Research on spatial magnetic field distributing of submarine based on magnetic dipole equivalent. Ship Sci. Technol. 2013, 35, 31–34. [Google Scholar] [CrossRef]
- Ye, W.; Feng, W.; Fan, S. A novel multi-swarm particle swarm optimization with dynamic learning strategy. Appl. Soft. Comput. 2017, 61, 832–843. [Google Scholar] [CrossRef]
| Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}