
Stick-Slip Vibration Suppression in Drill String Using Observer-Based LQG Controller


 and
and
Abstract
:1. Introduction
2. Vibrations in Drill String
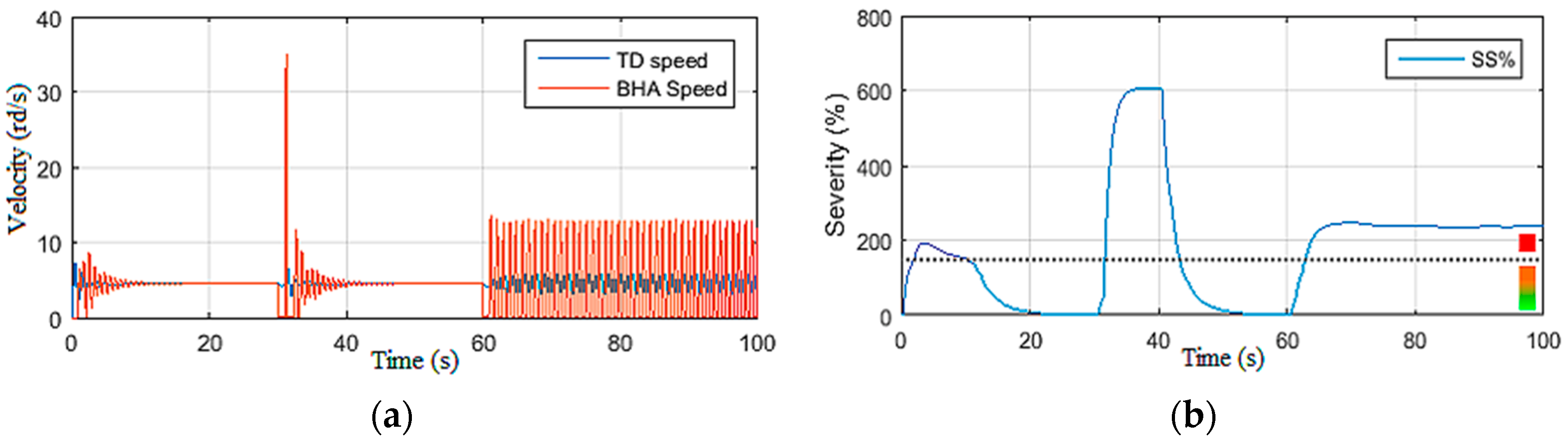
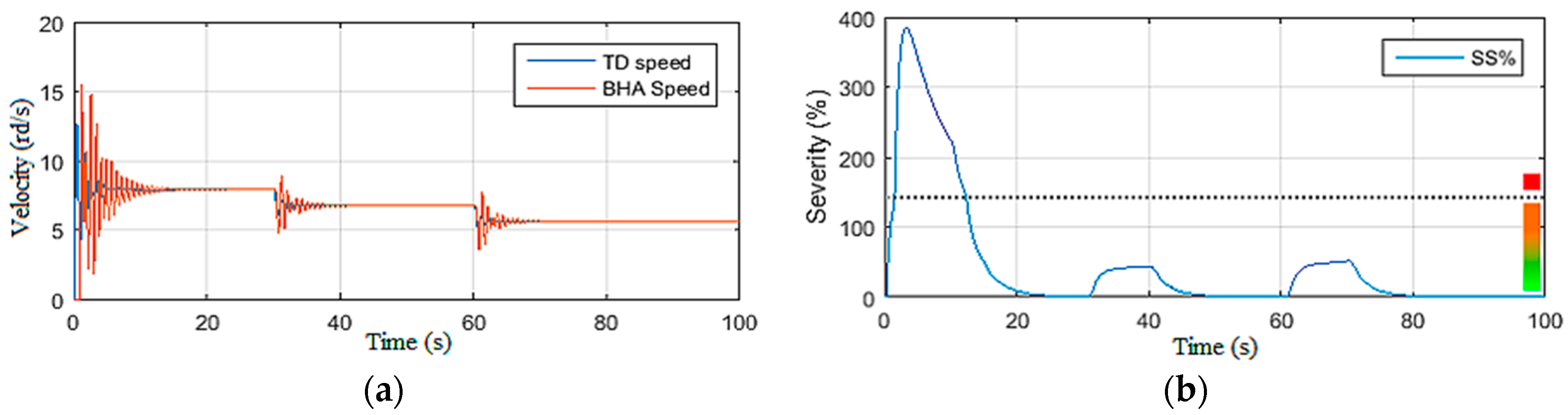
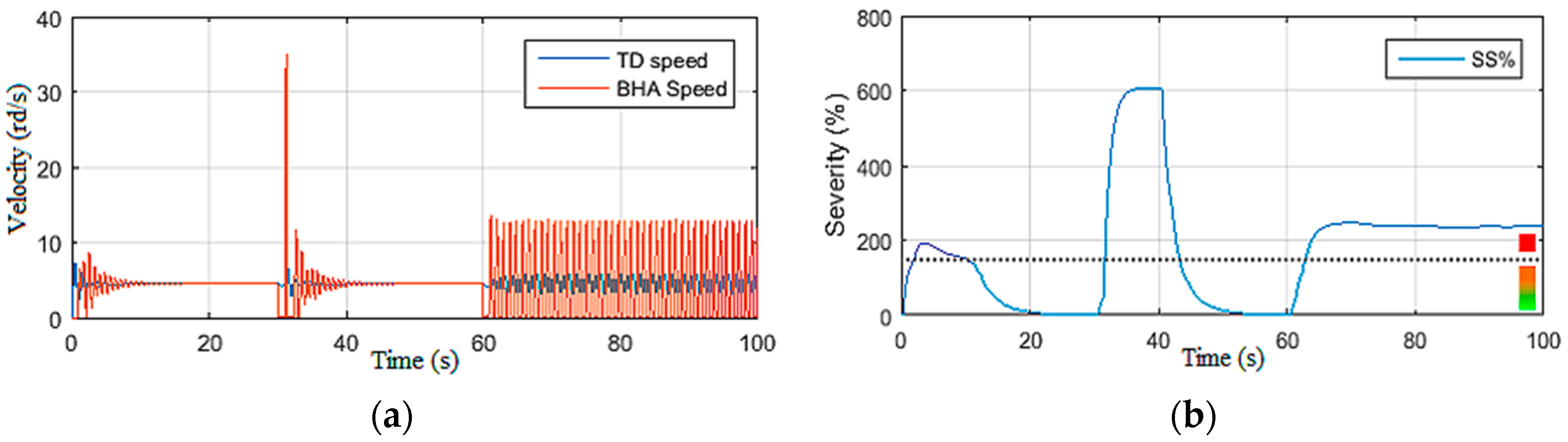
2.1. Torsional Vibration Severity
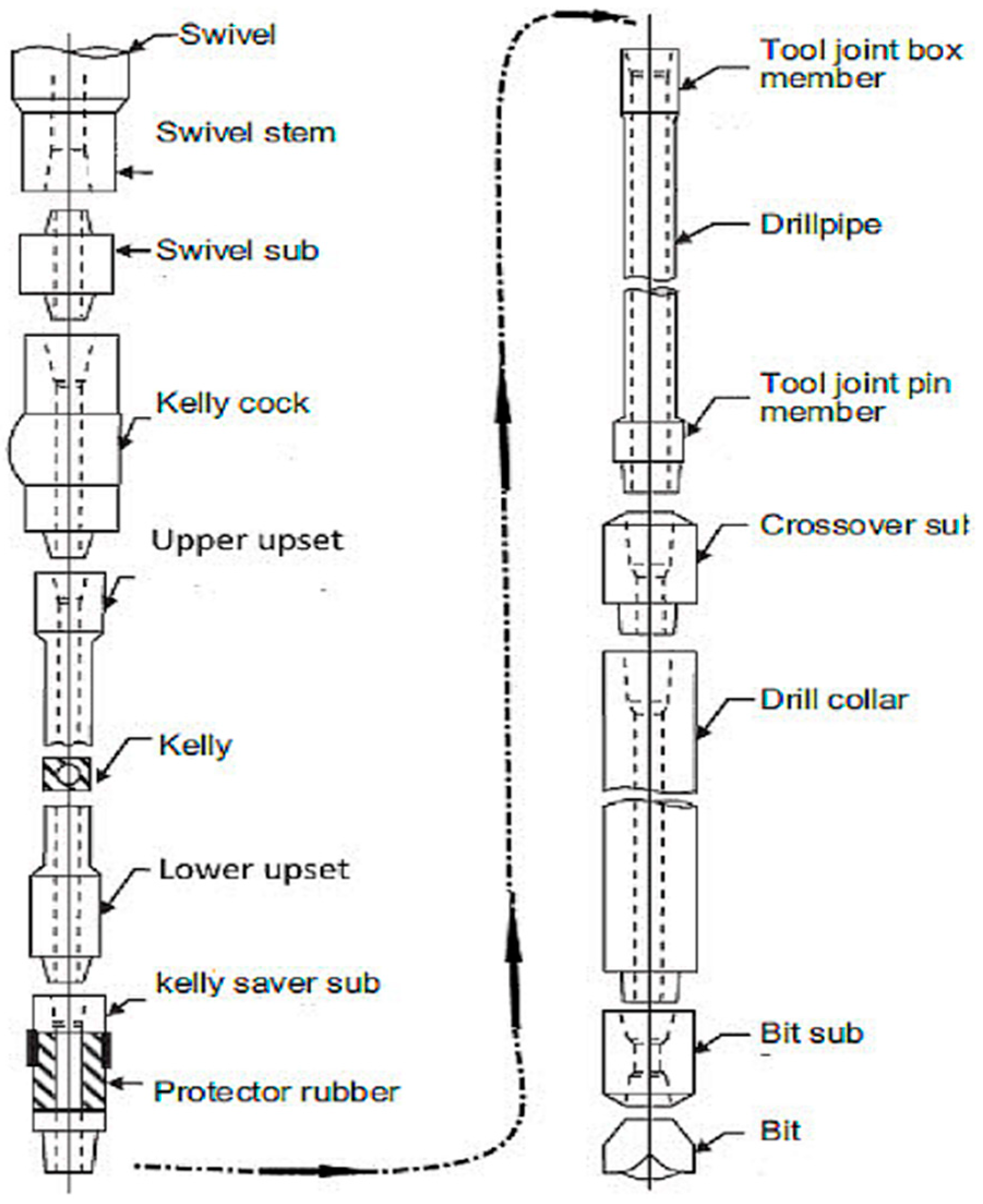
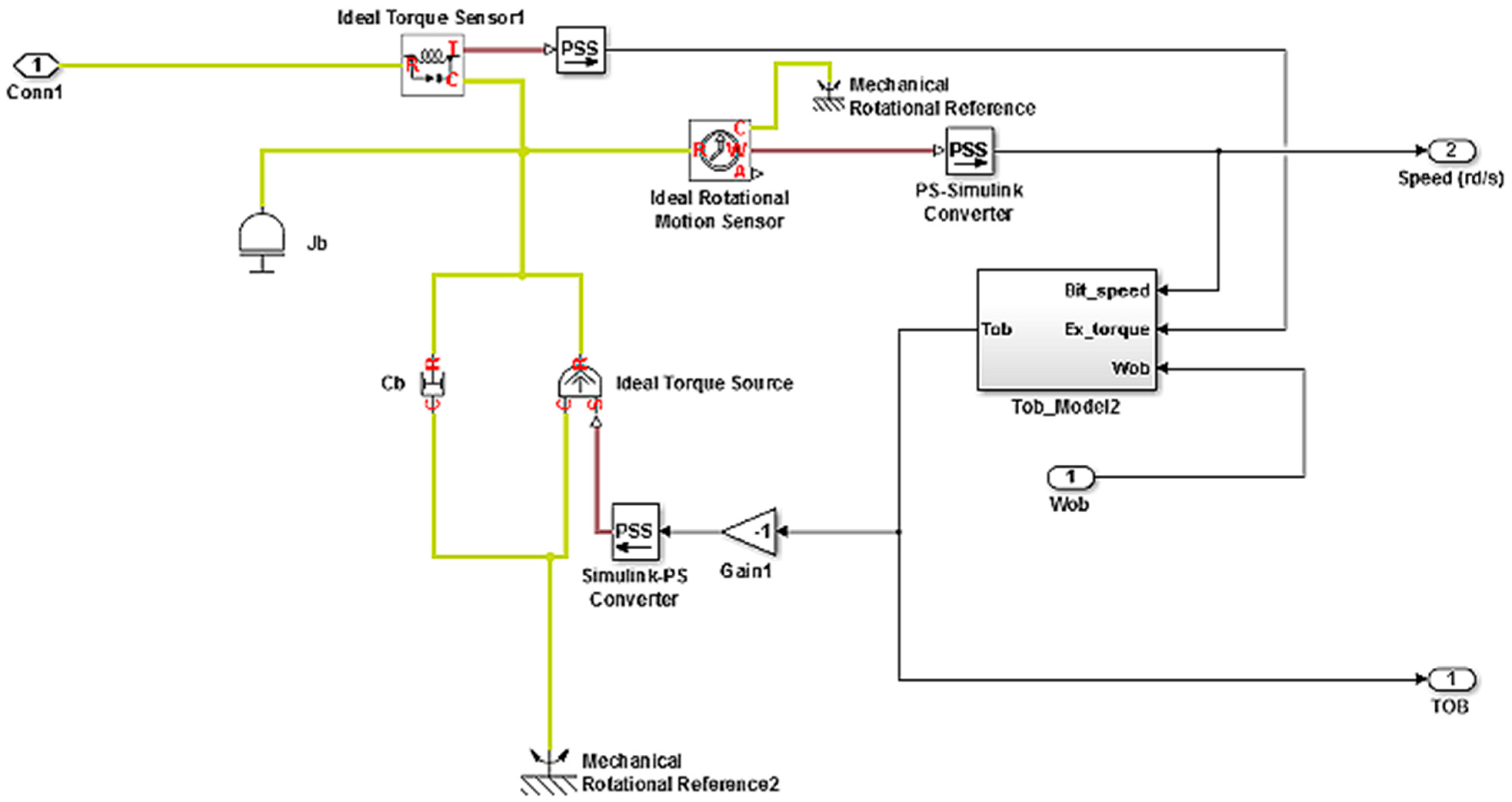
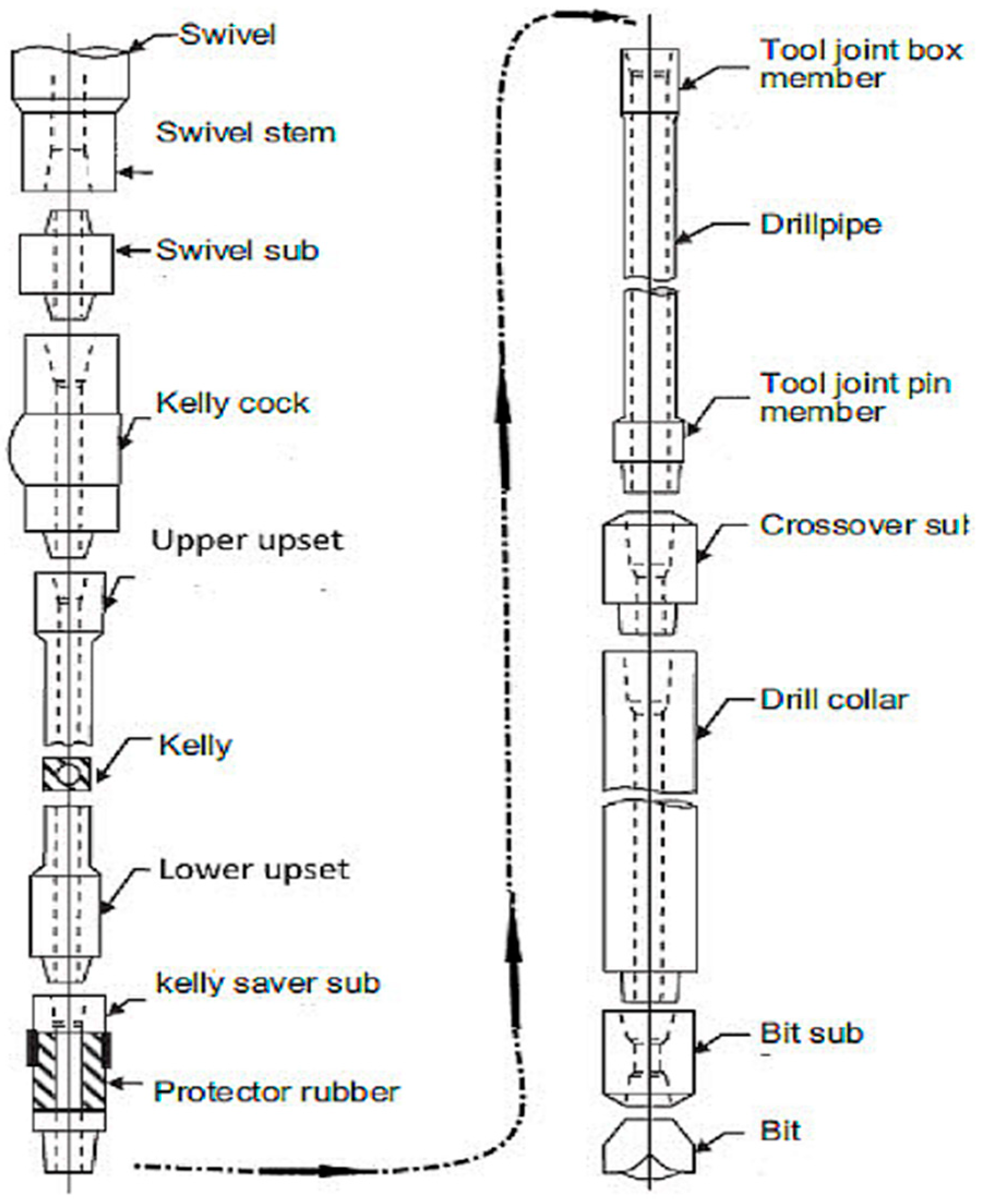
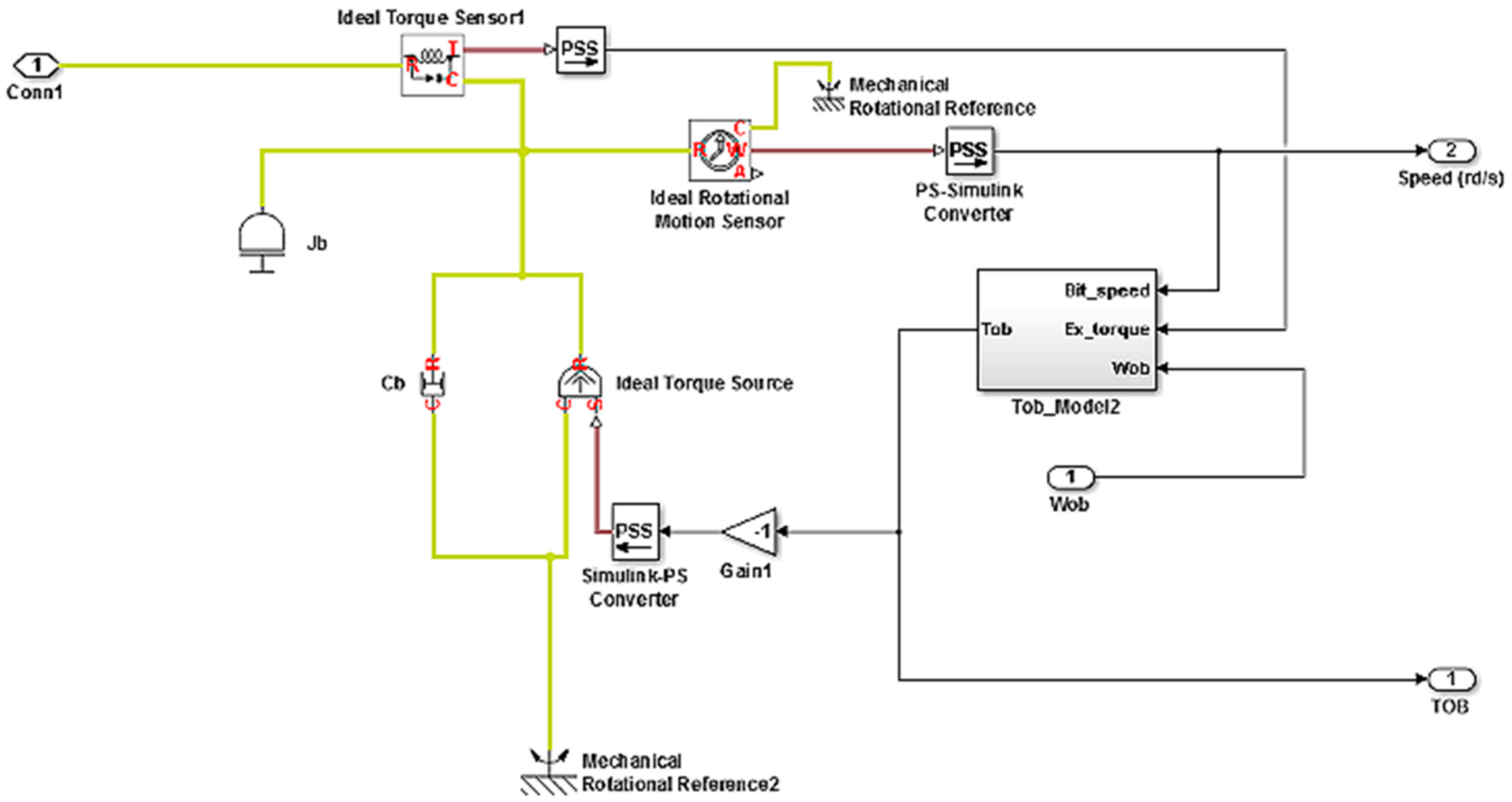
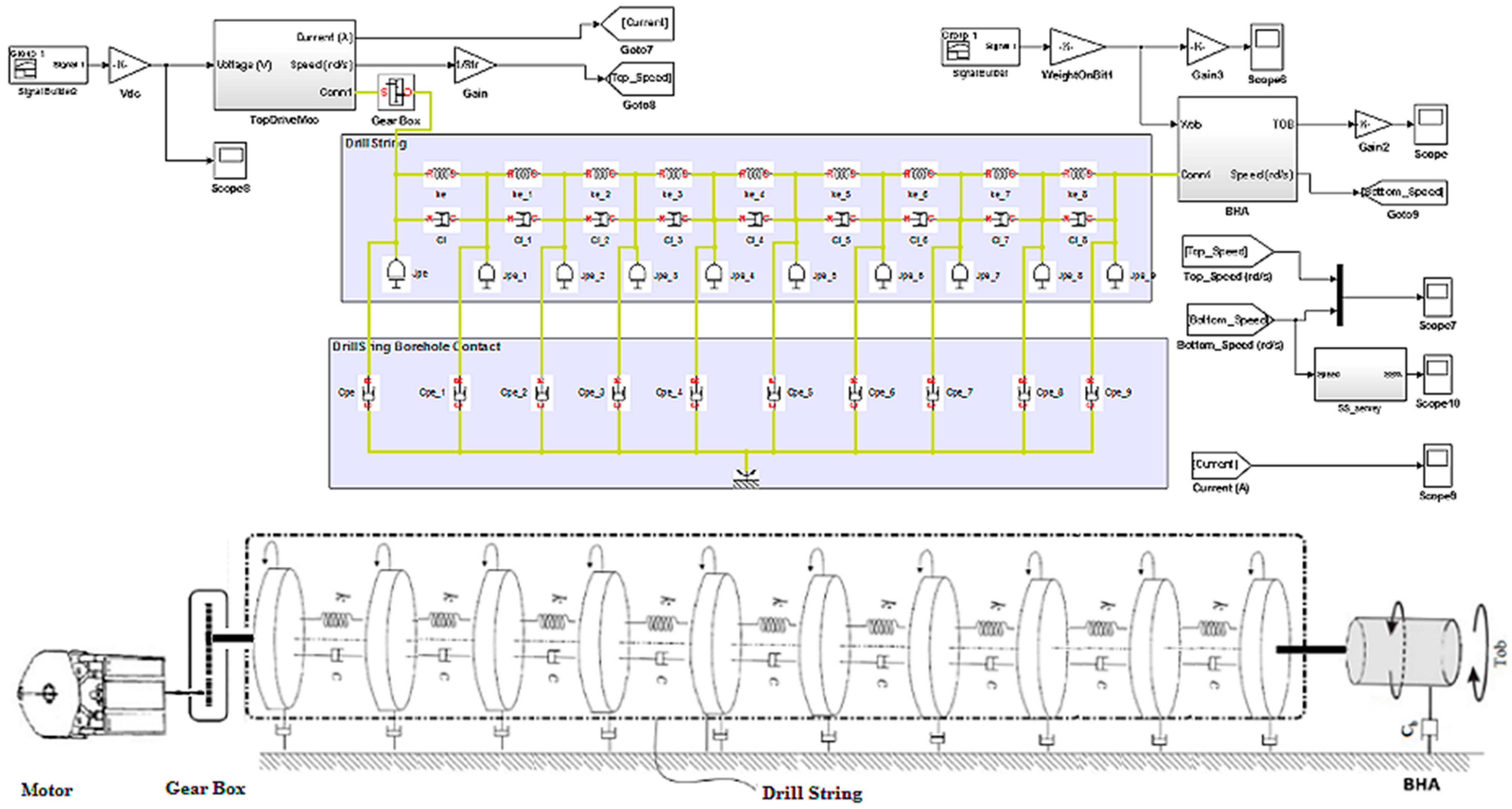
2.2. Drill String Model under Torsional Vibrations
2.3. Model Responses
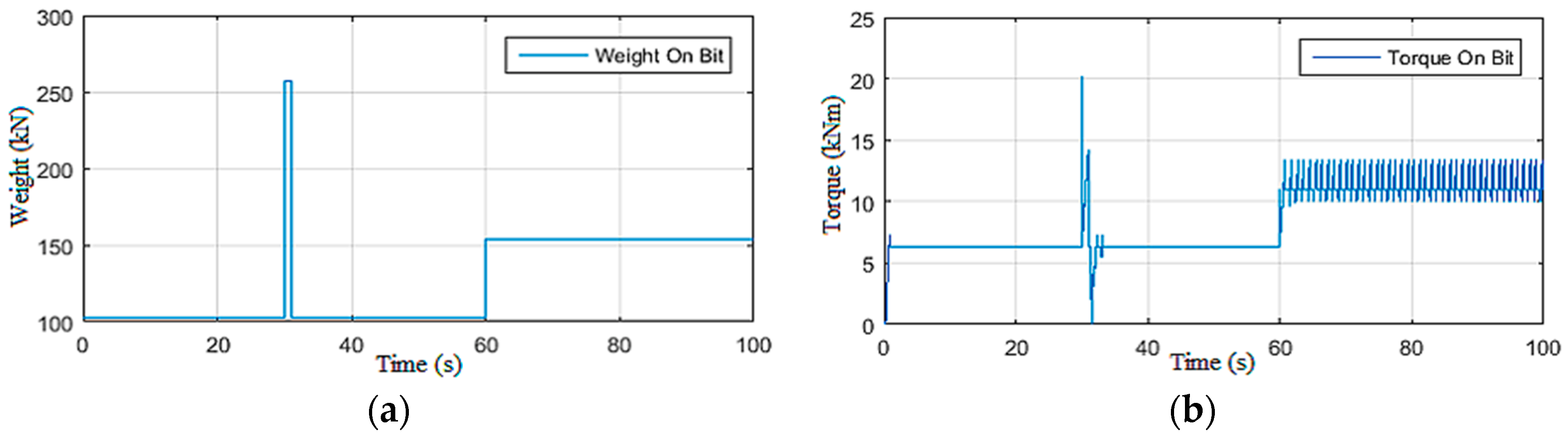
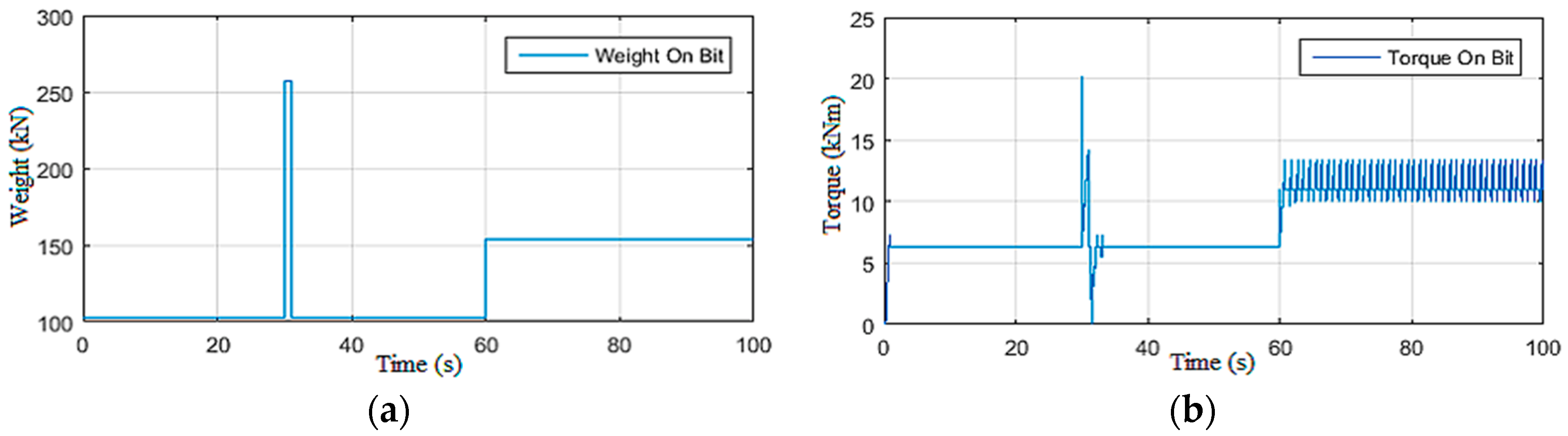
2.3.1. Simulations under Constant Weight on Bit
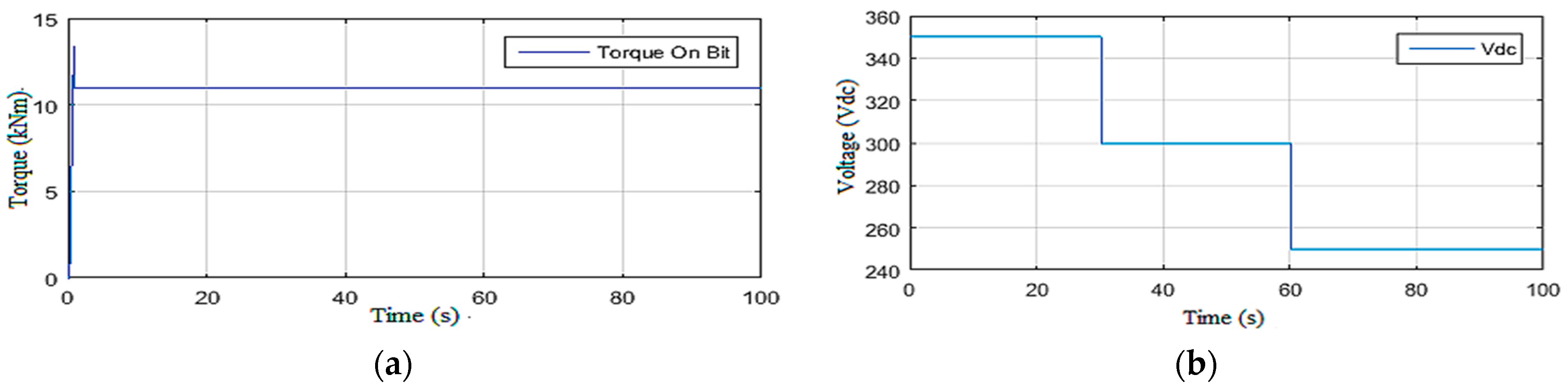
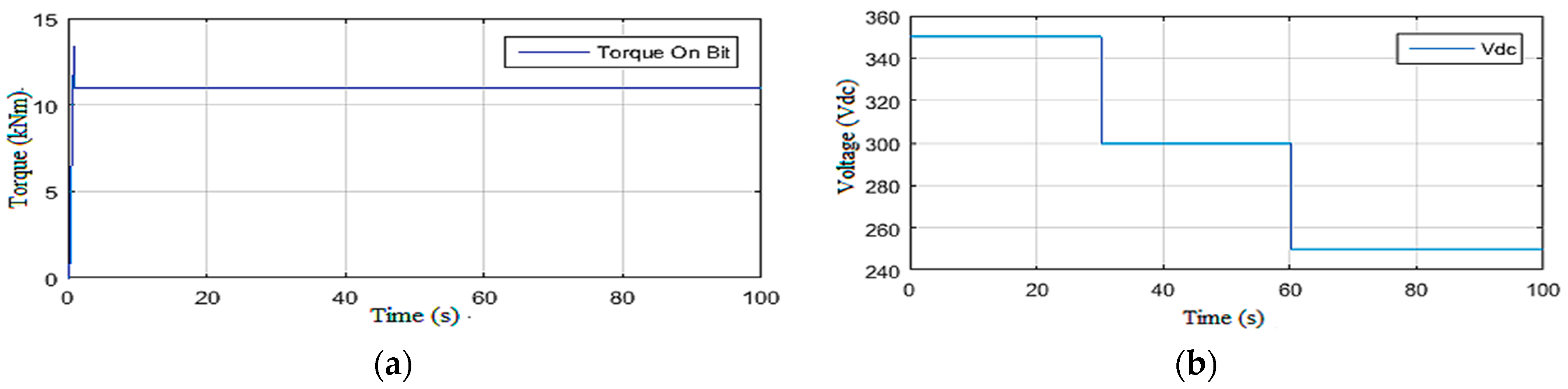
2.3.2. Simulations under Constant Voltage Vdc
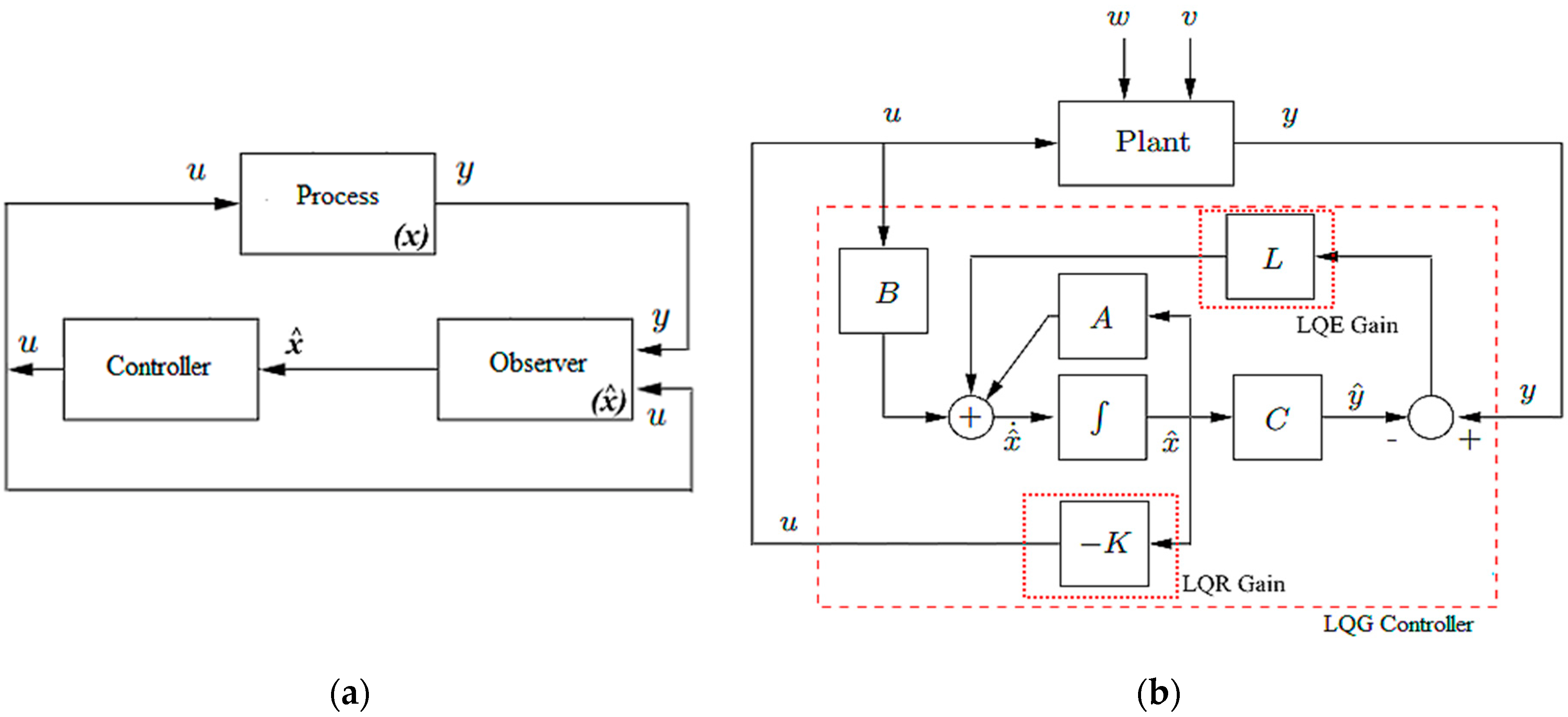
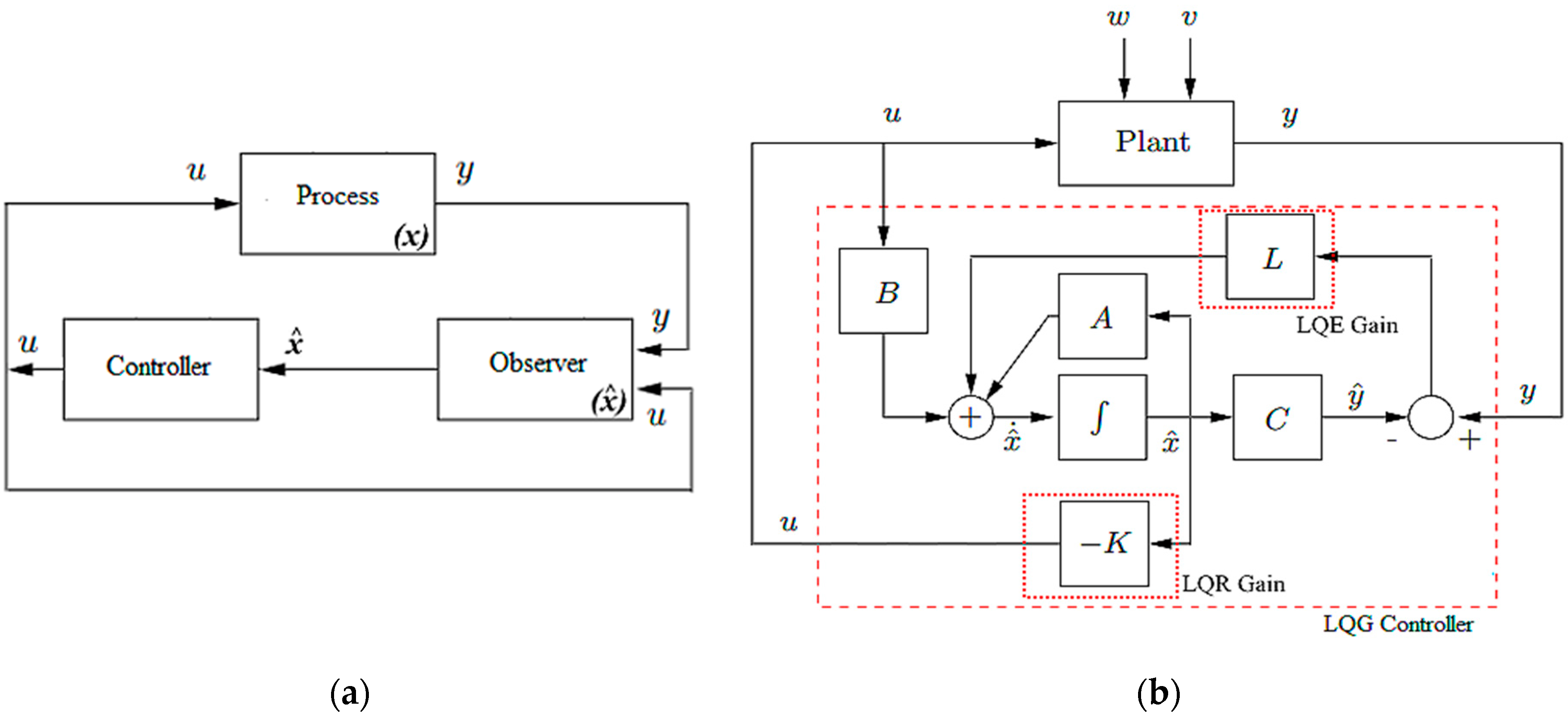
3. Observer-Based LQG Controller for Drill String
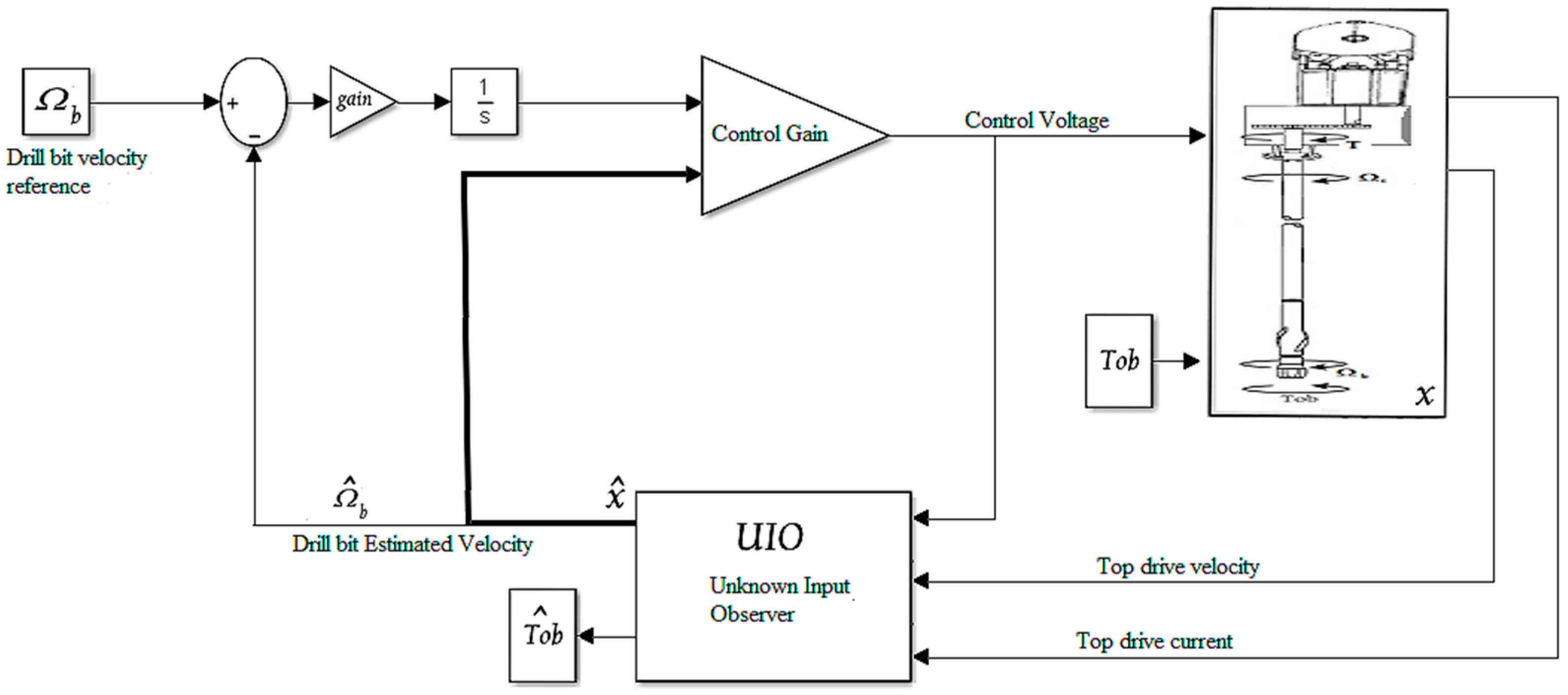
3.1. Observer Synthesis
3.2. Controller Synthesis
4. Results and Discussion
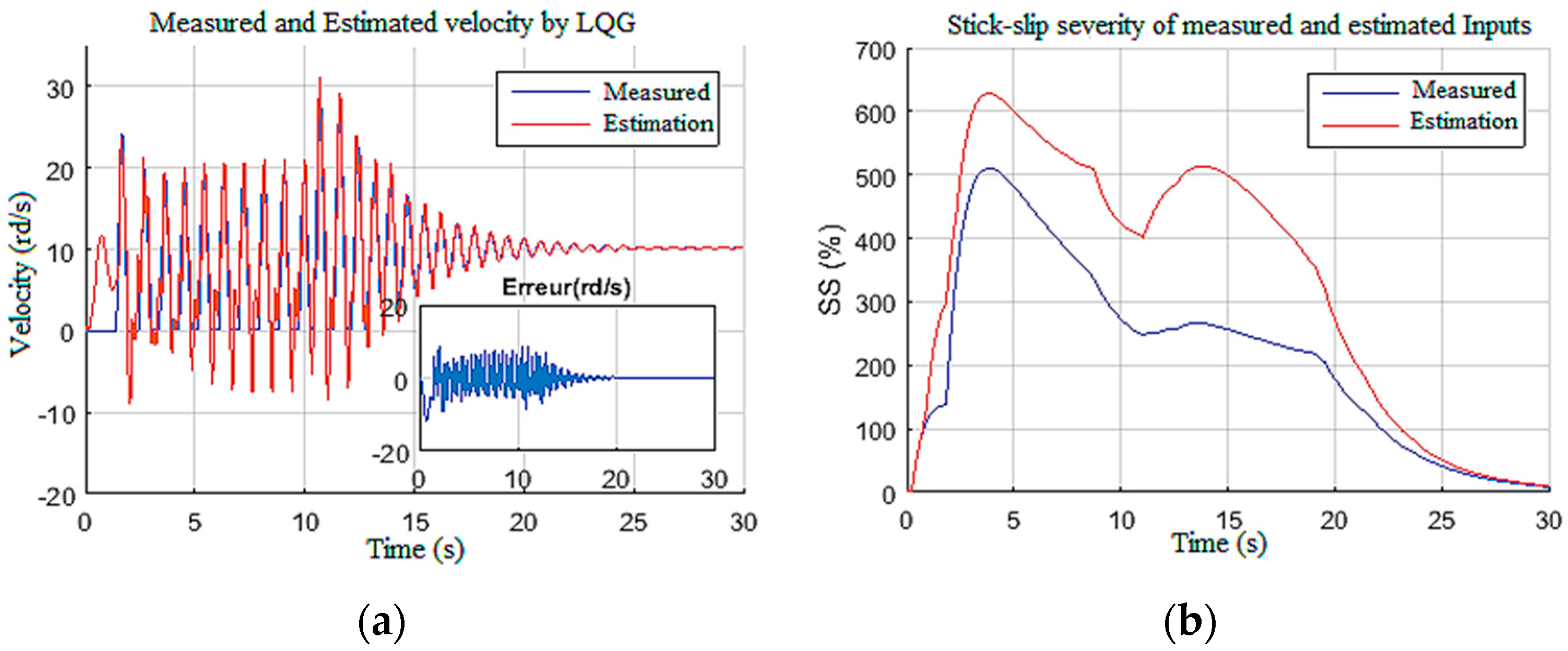
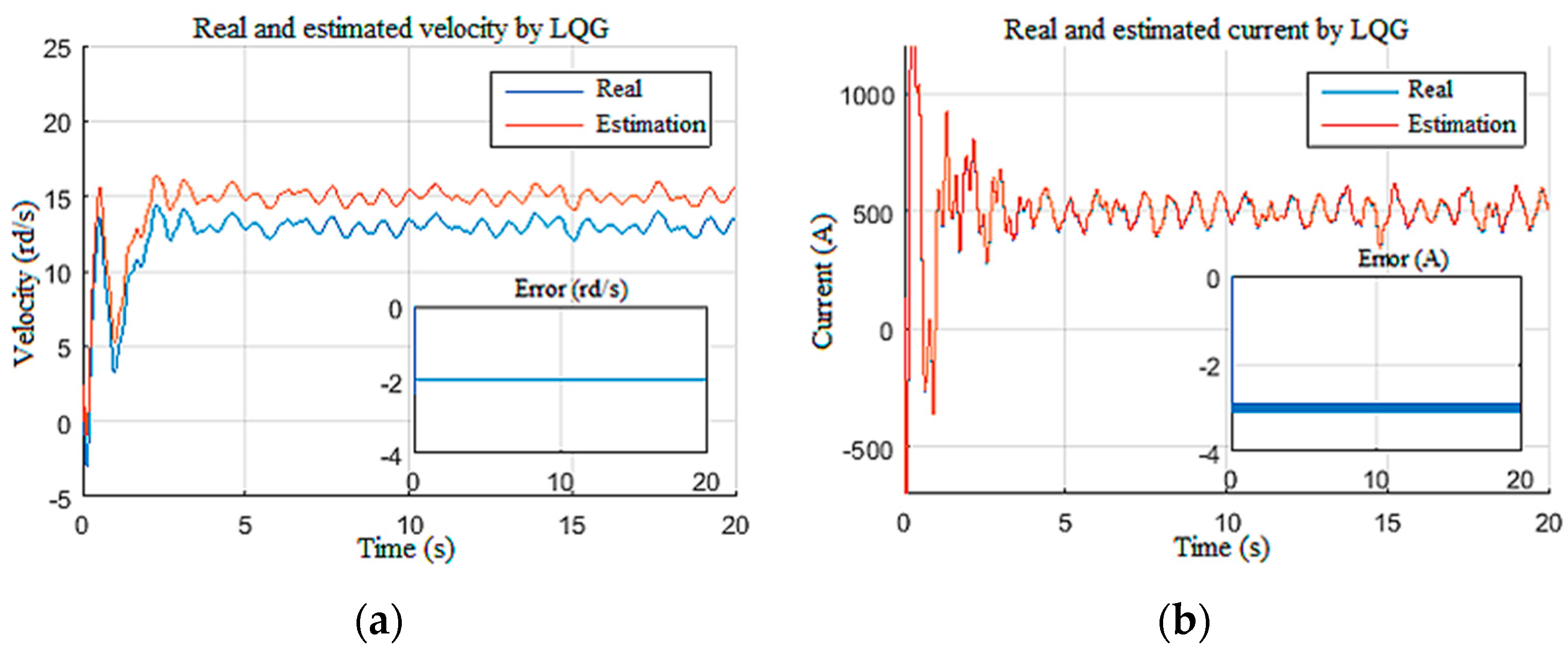
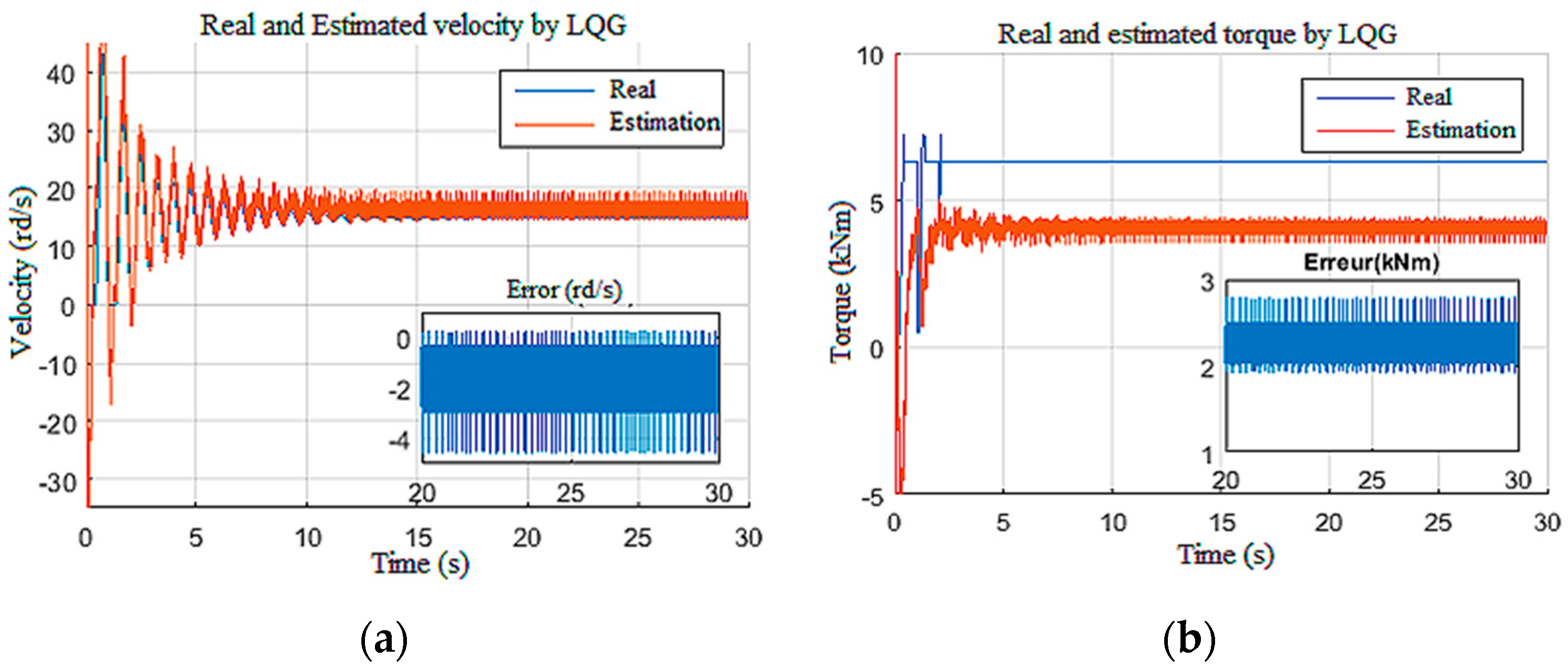
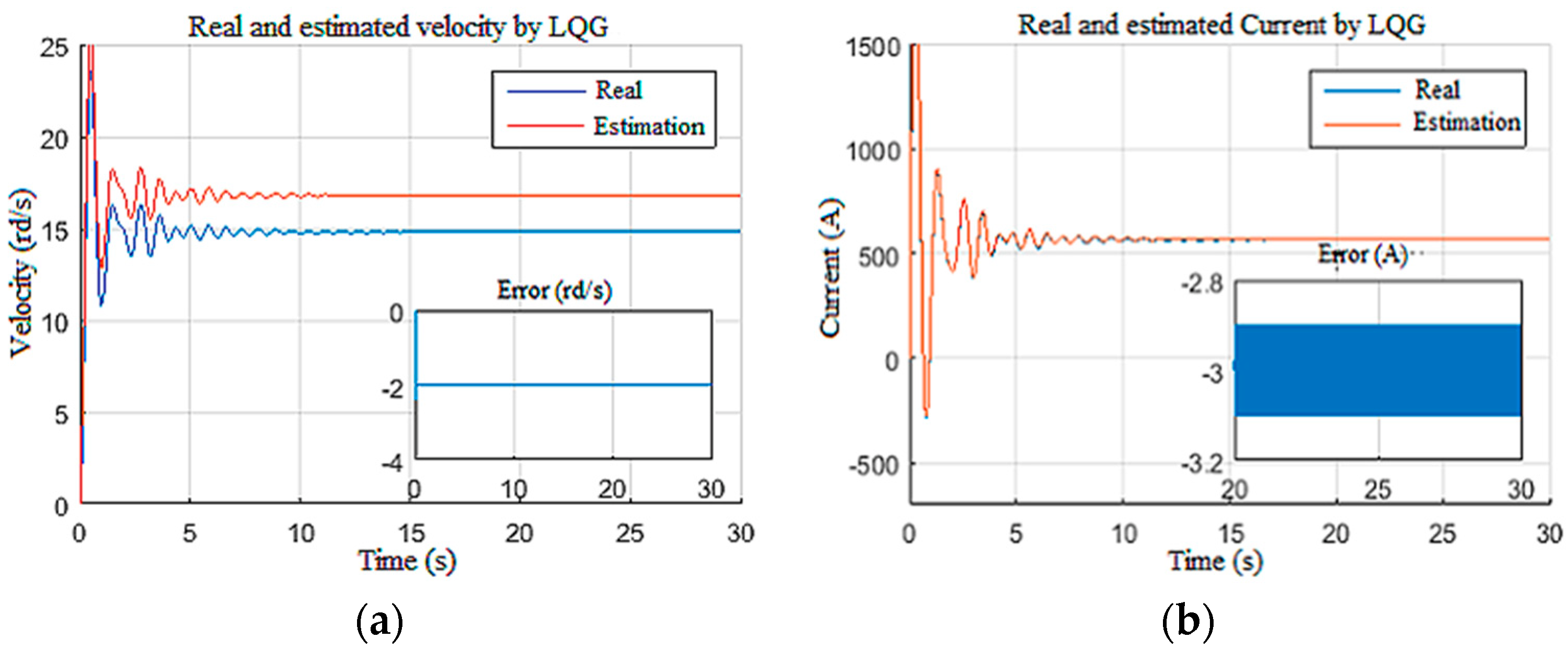
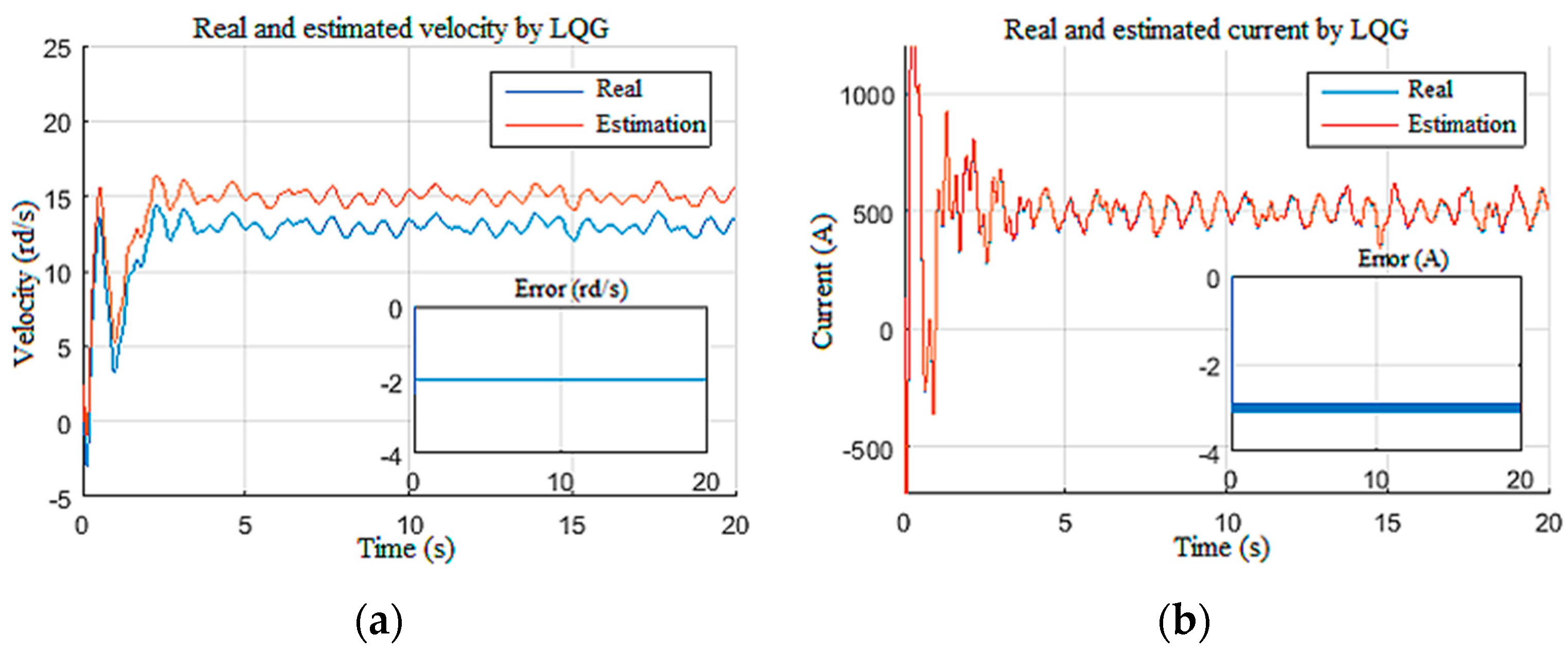
4.1. Observer Performance Tests
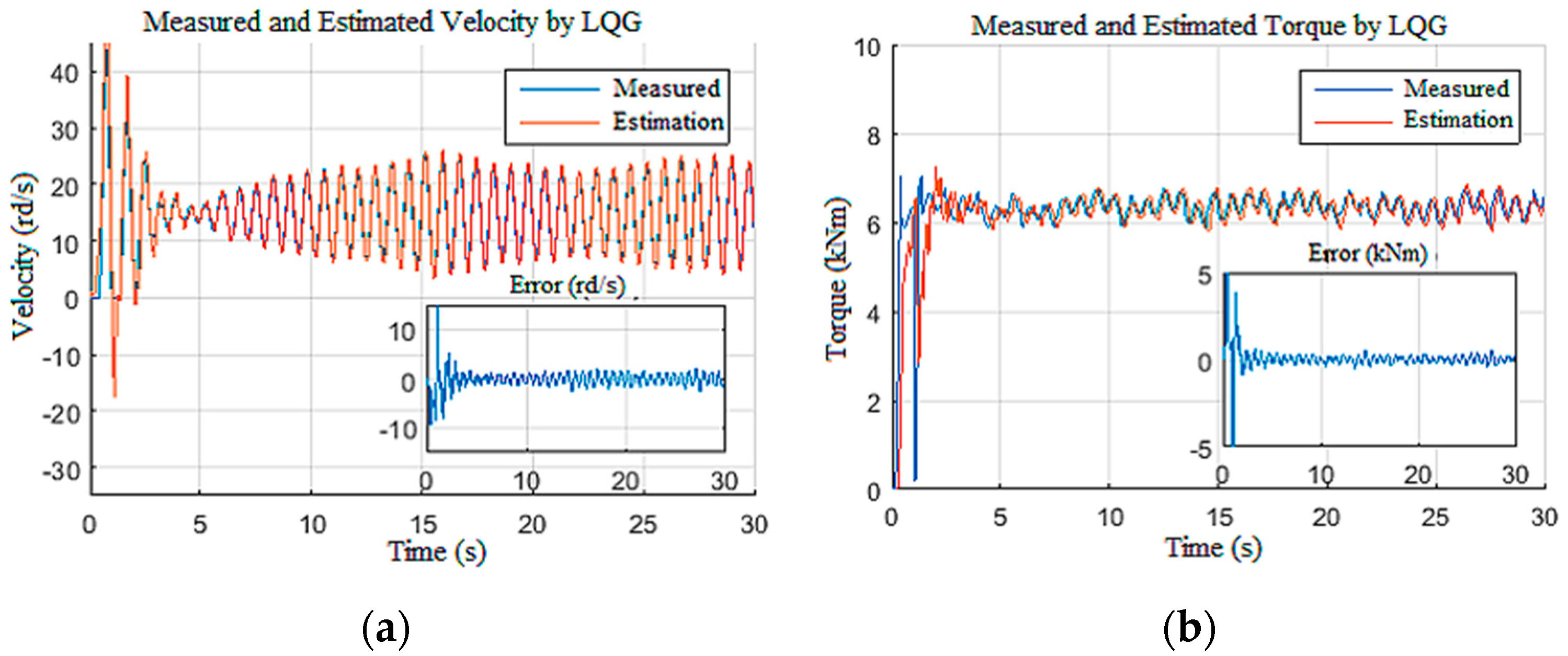
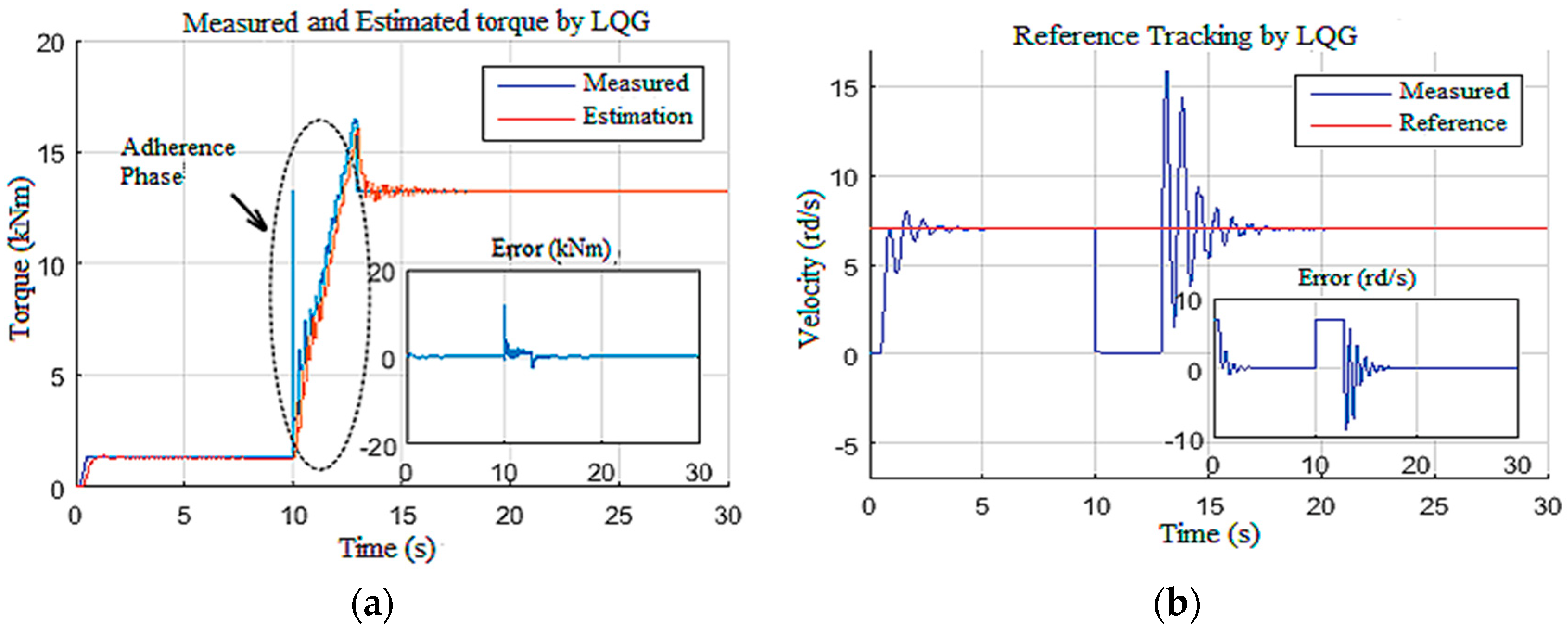
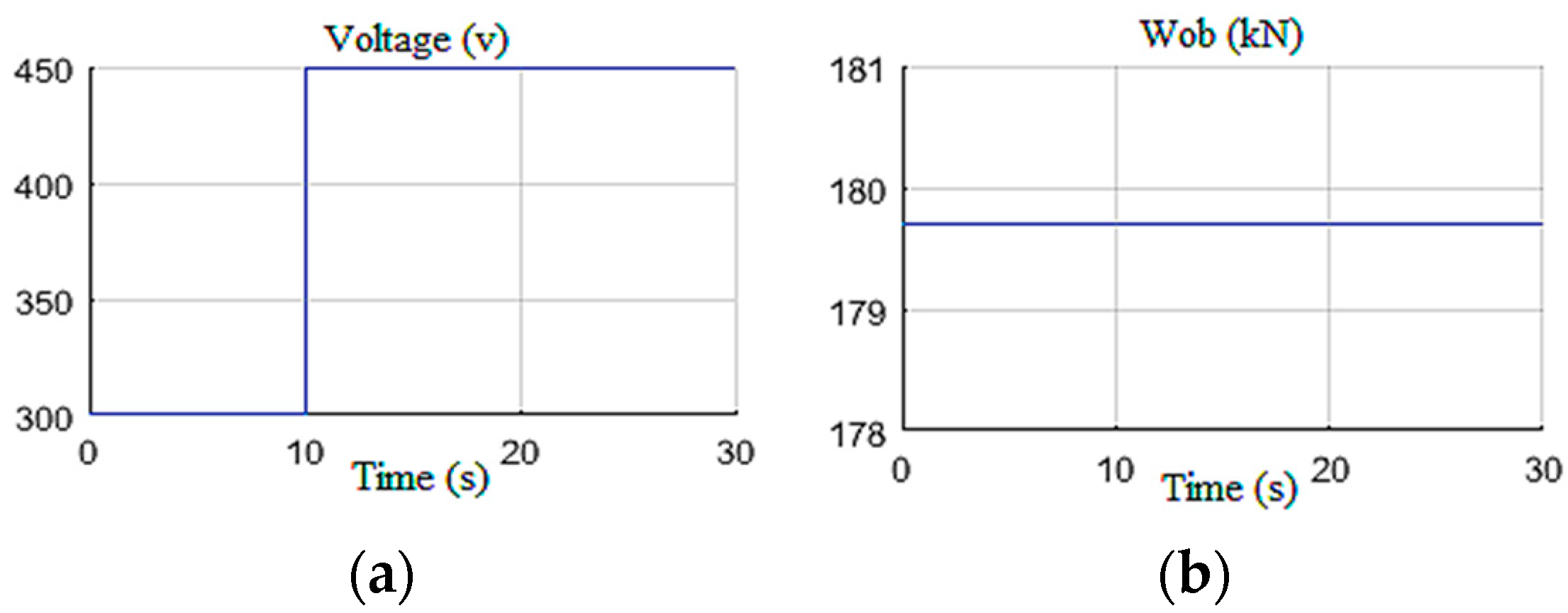
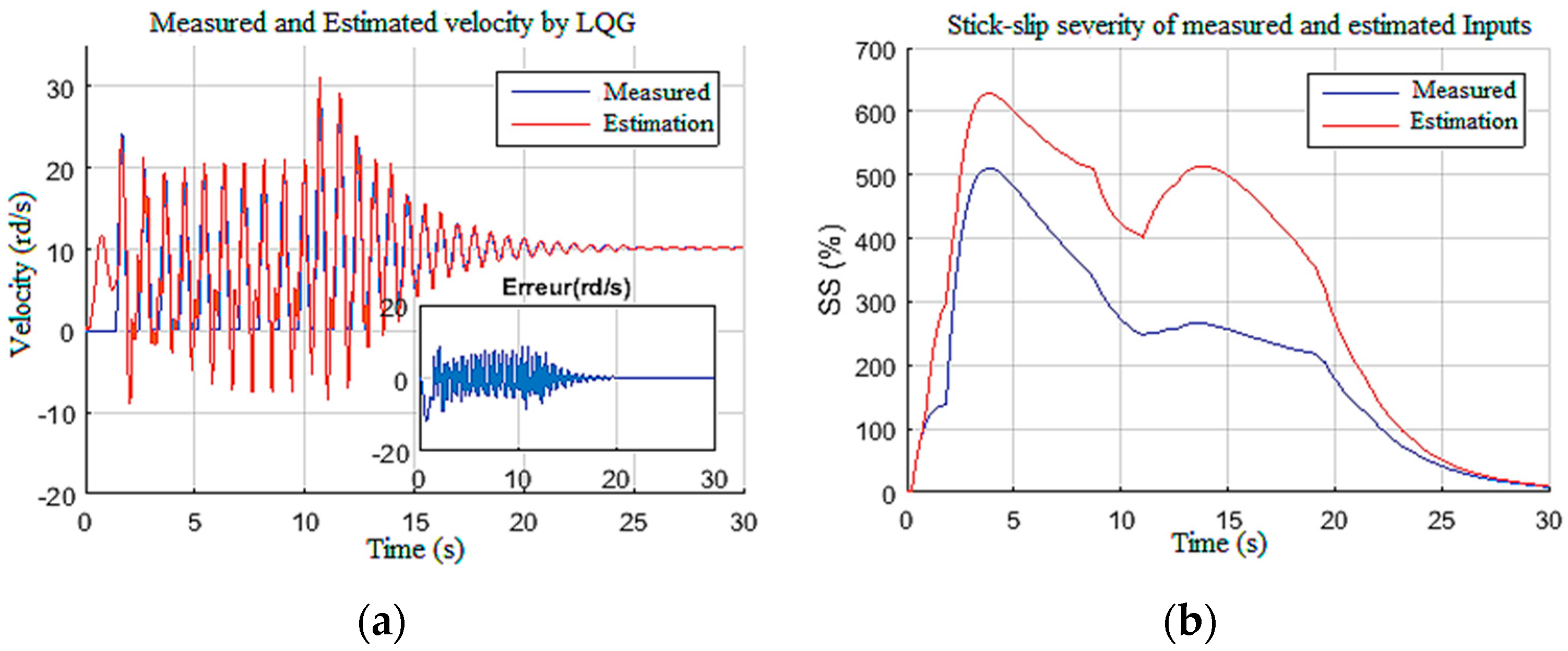
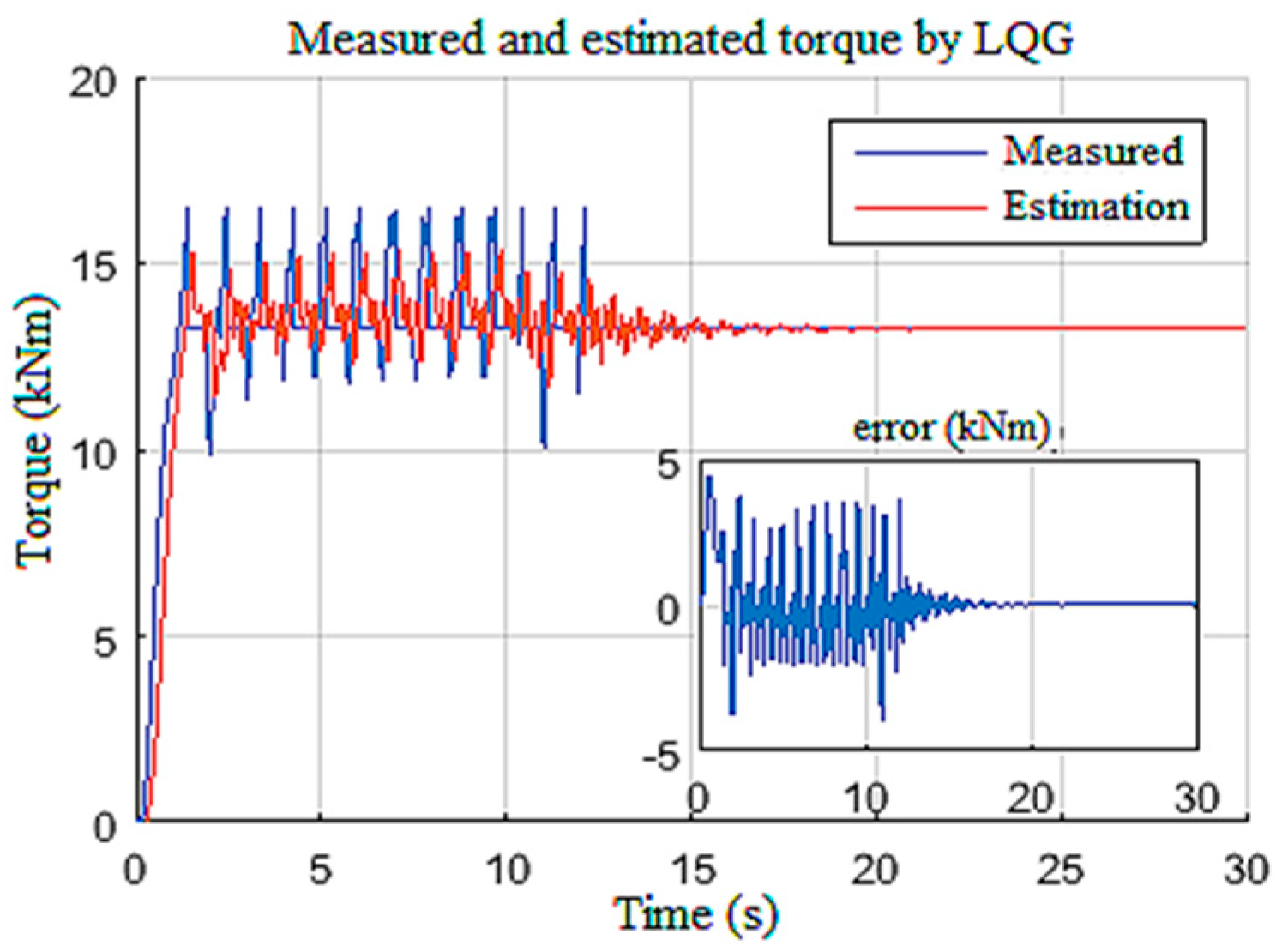
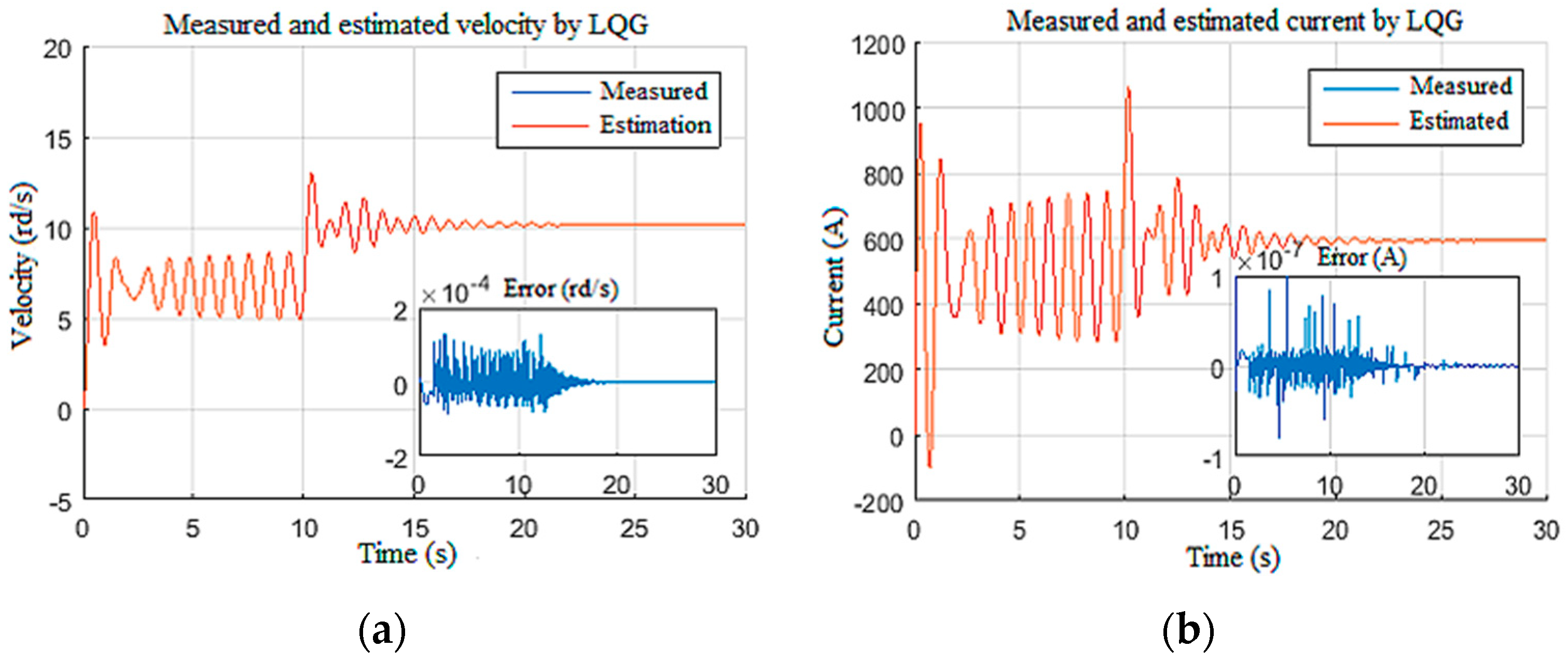
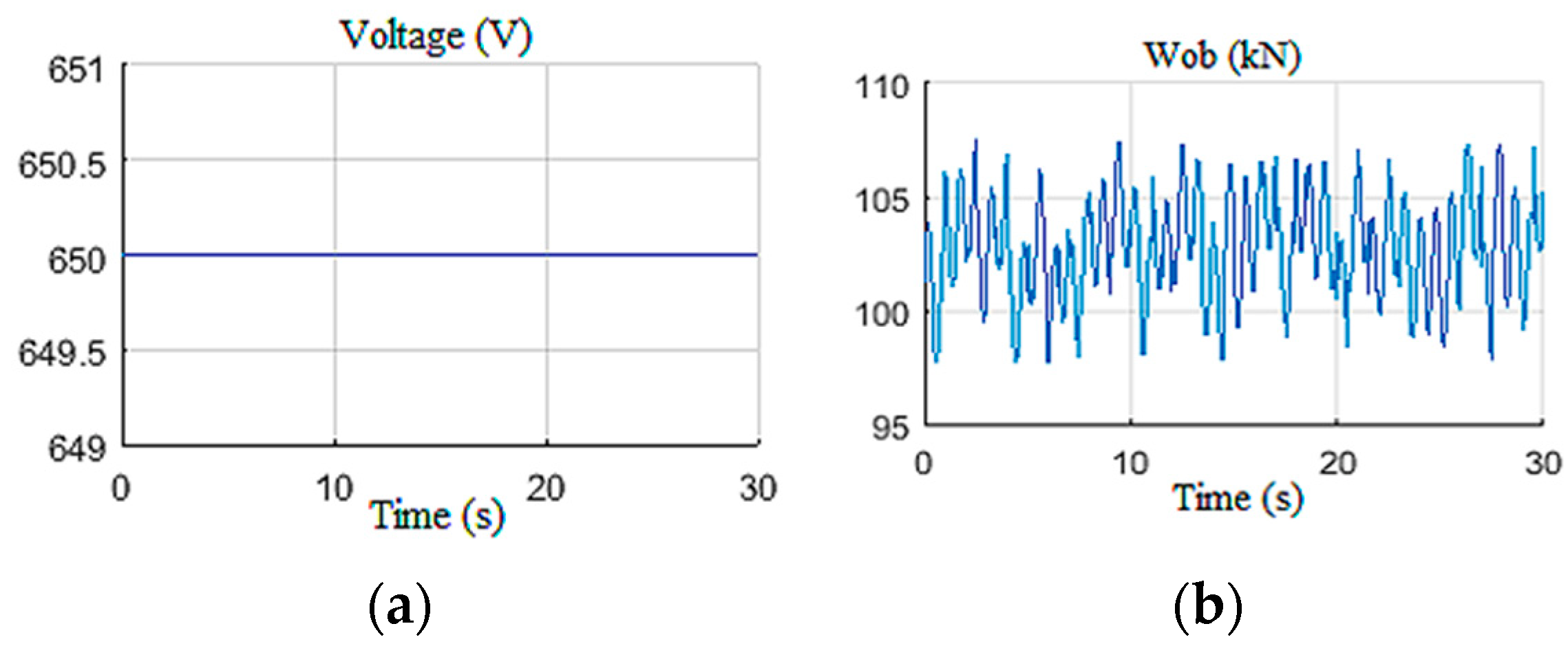
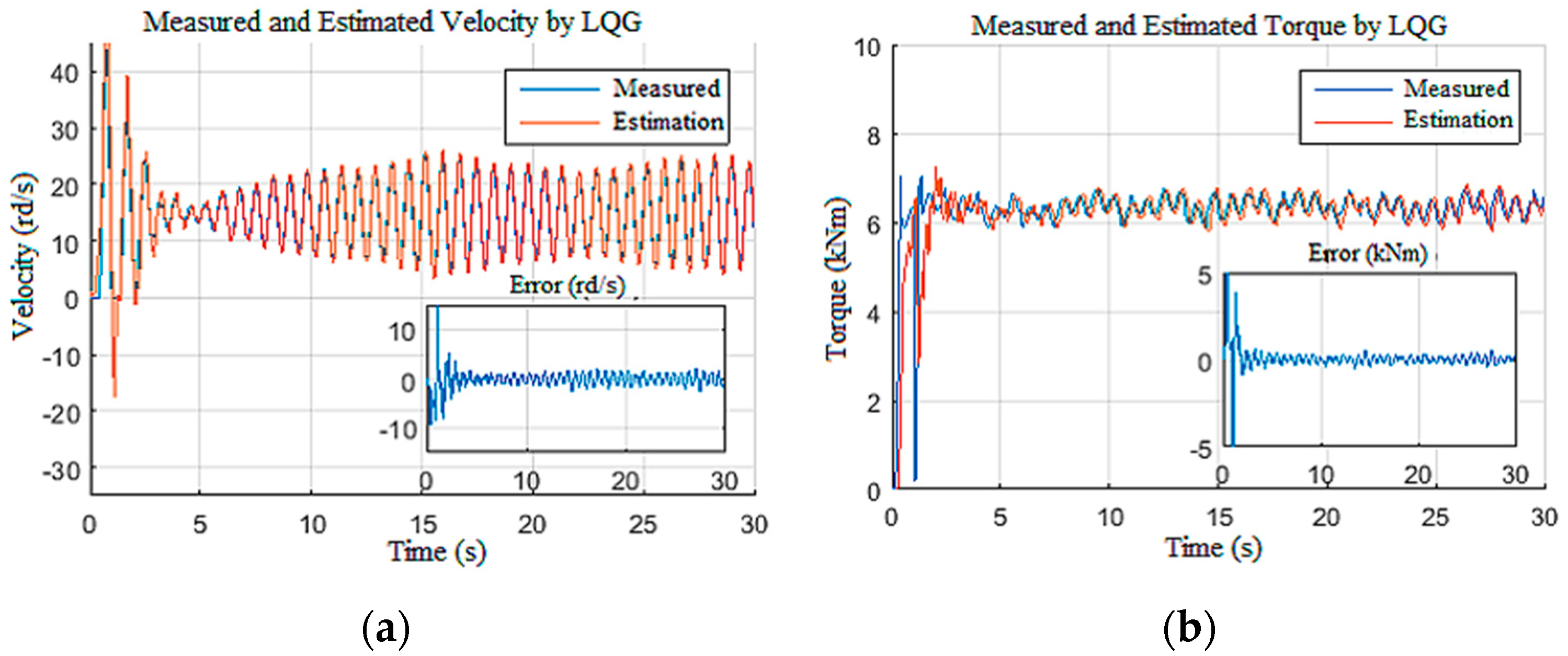
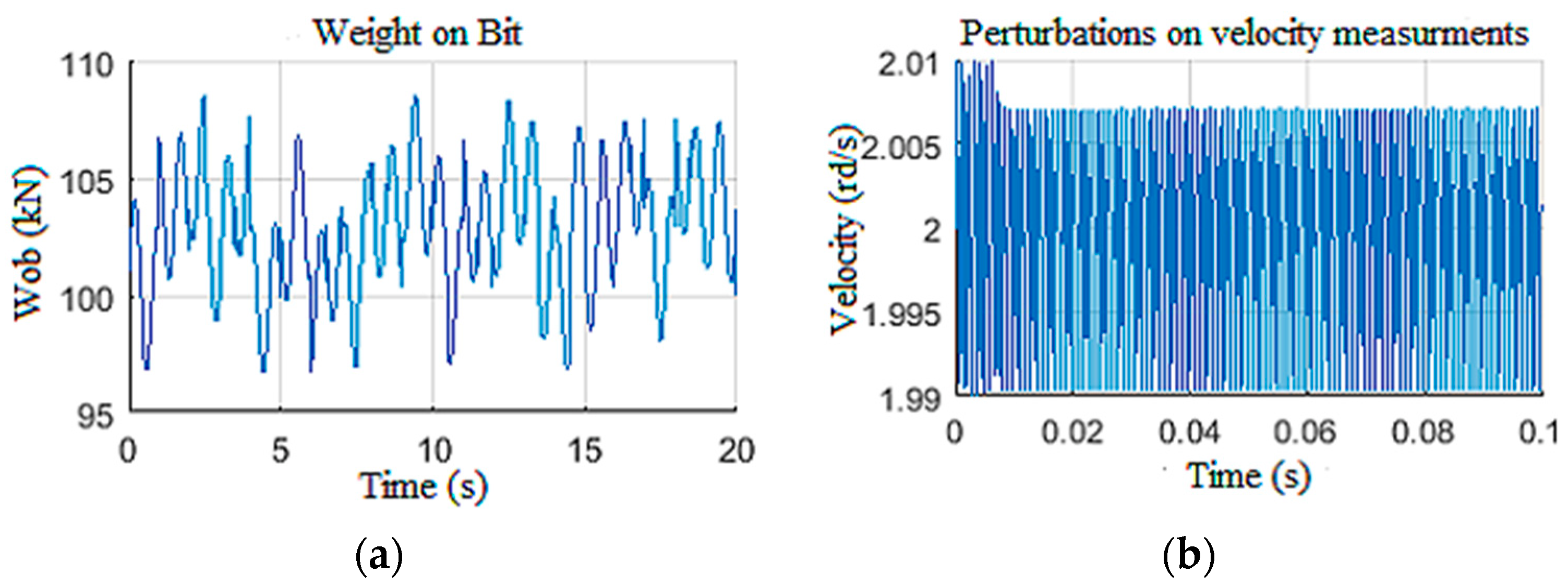
4.1.1. Constant Wob with U Step
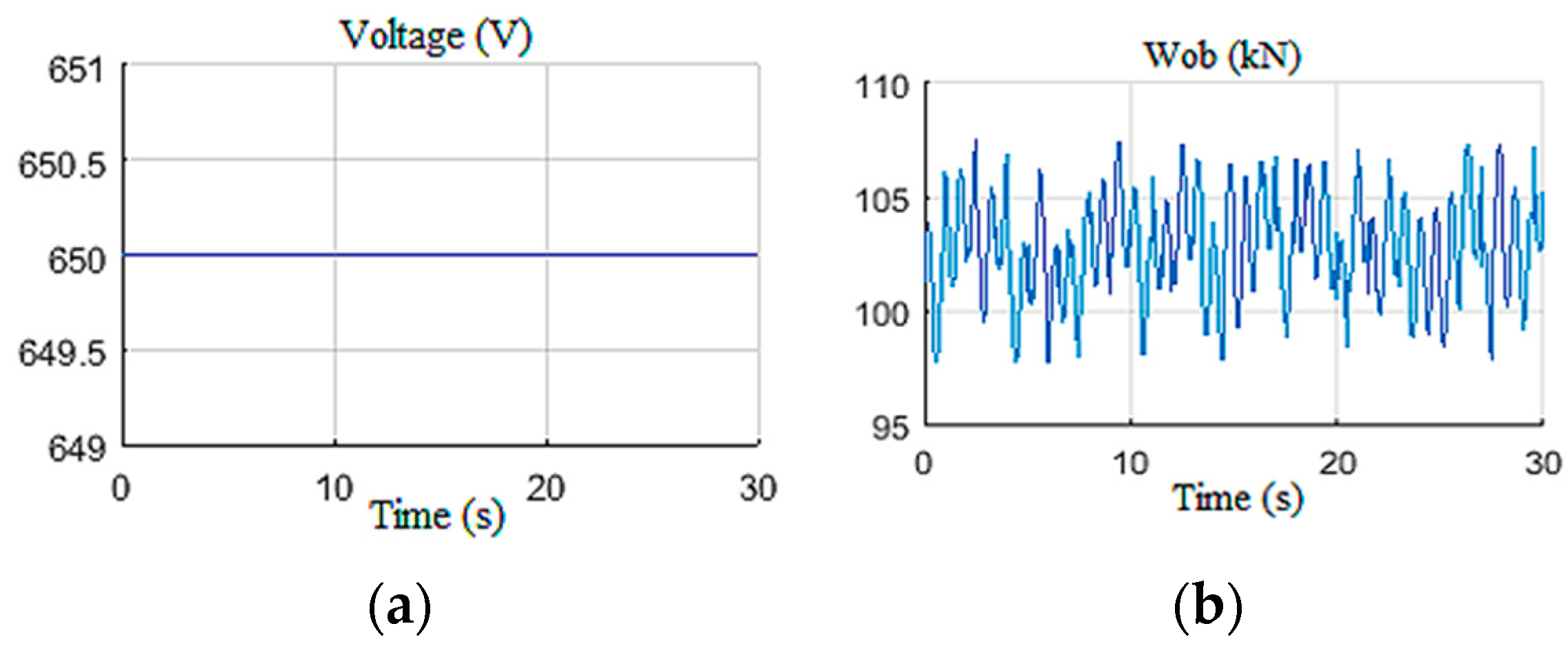
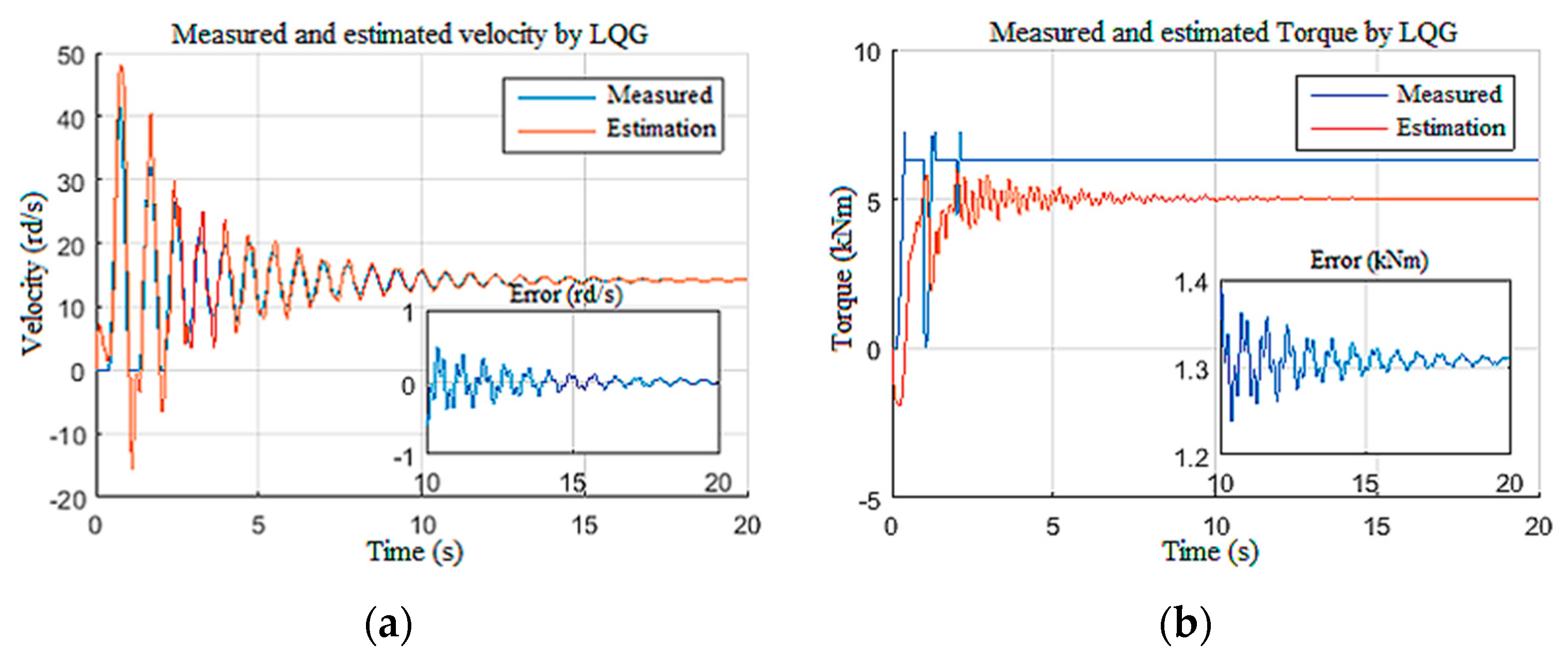
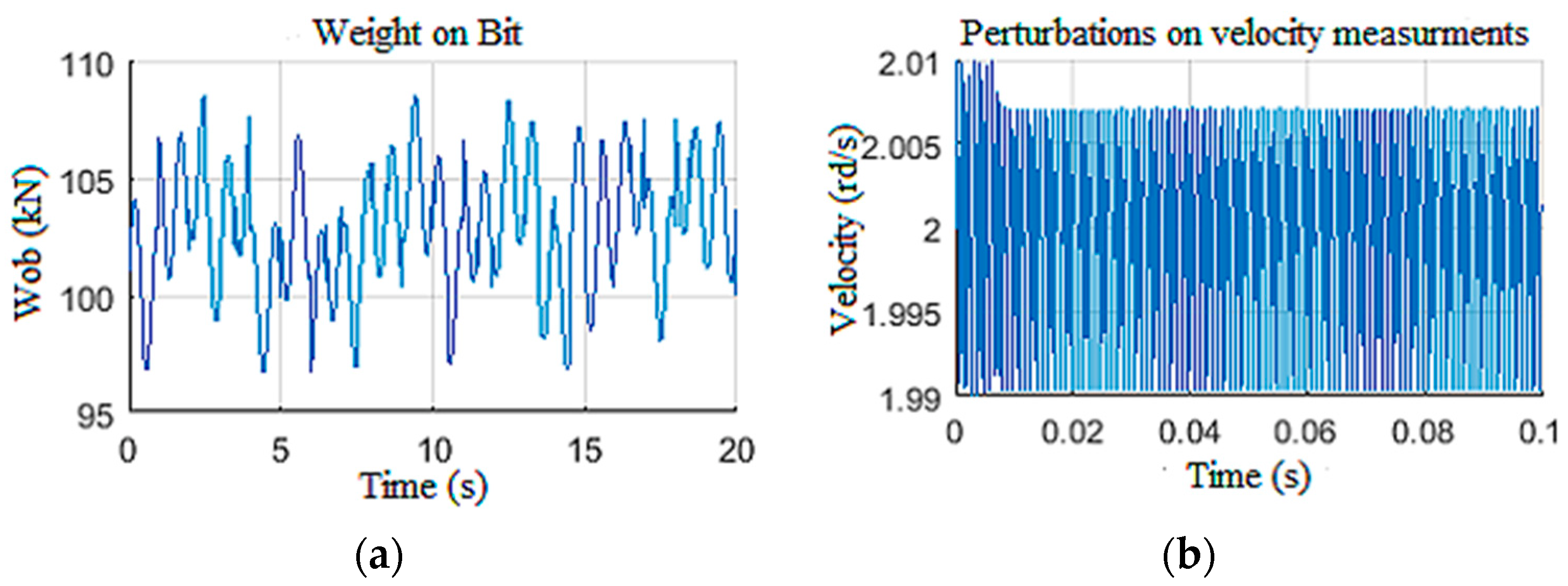
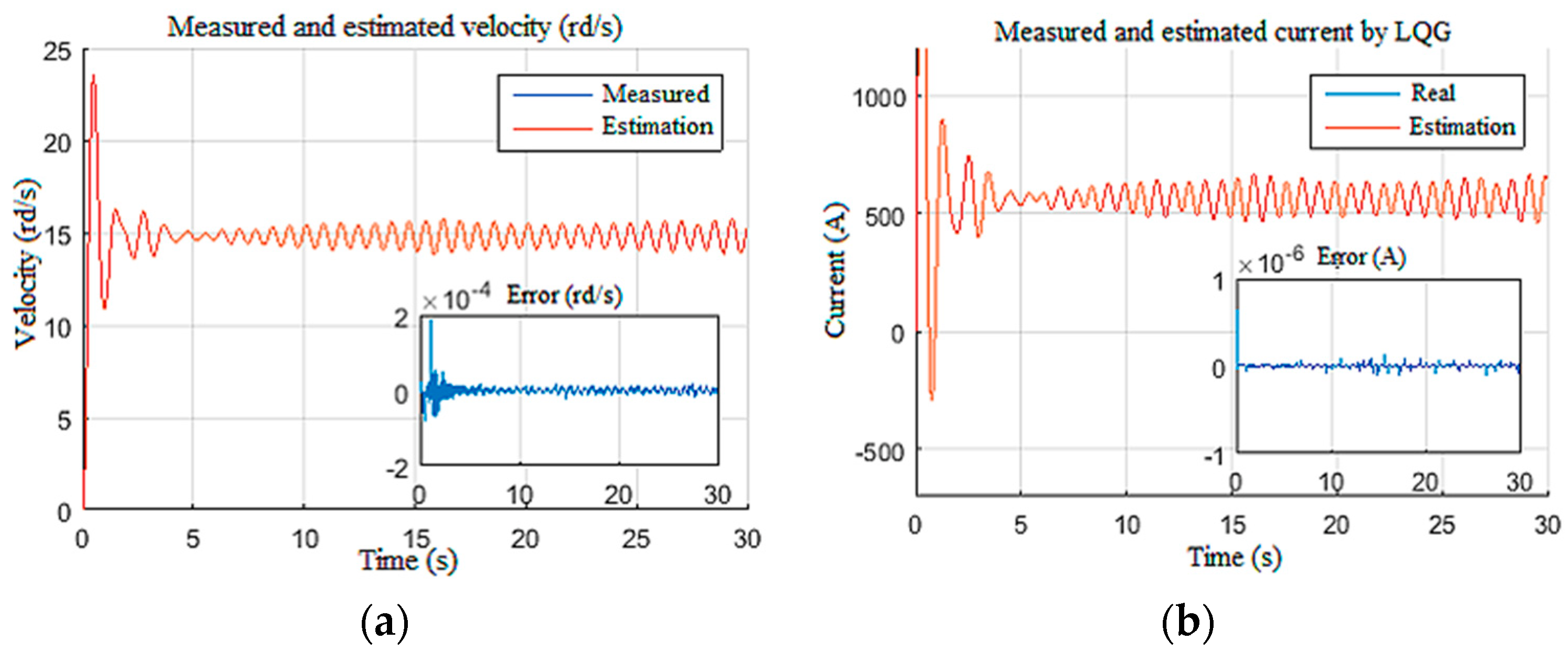
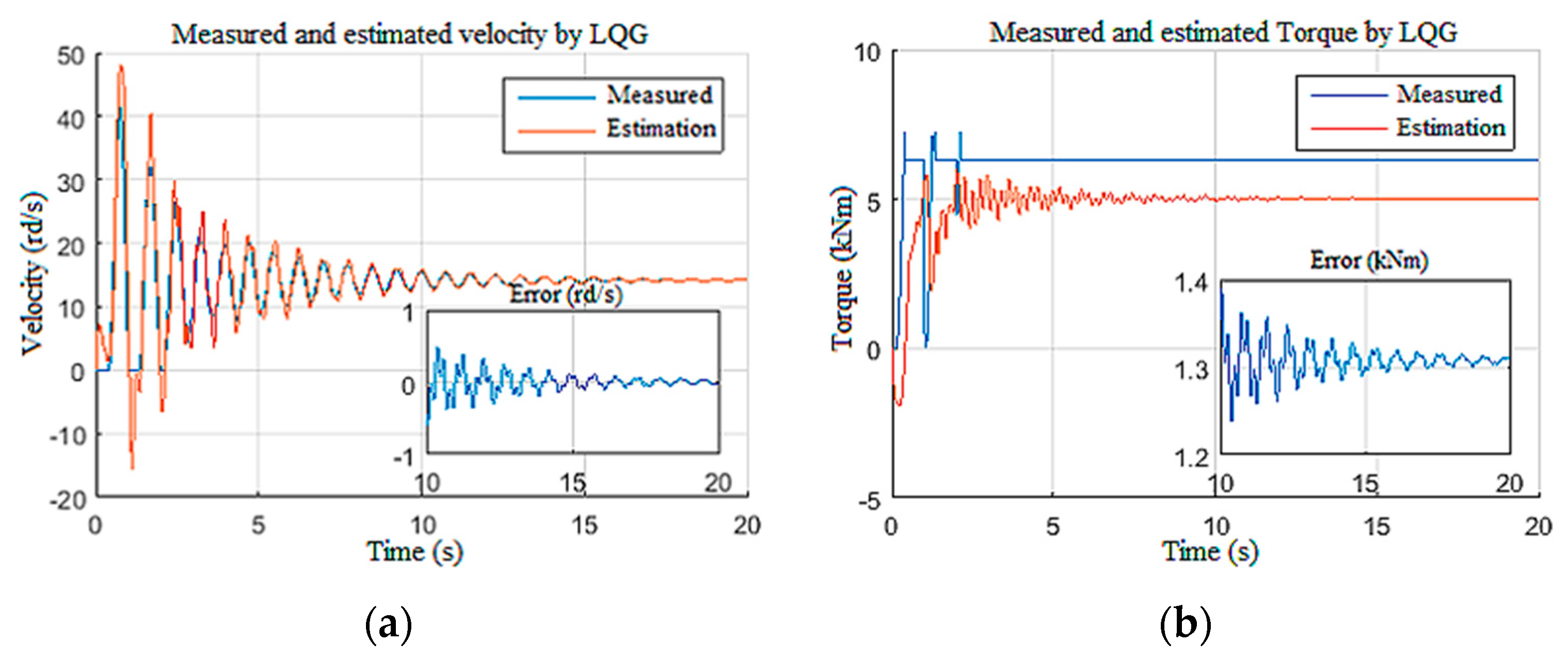
4.1.2. Random Wob with Constant U
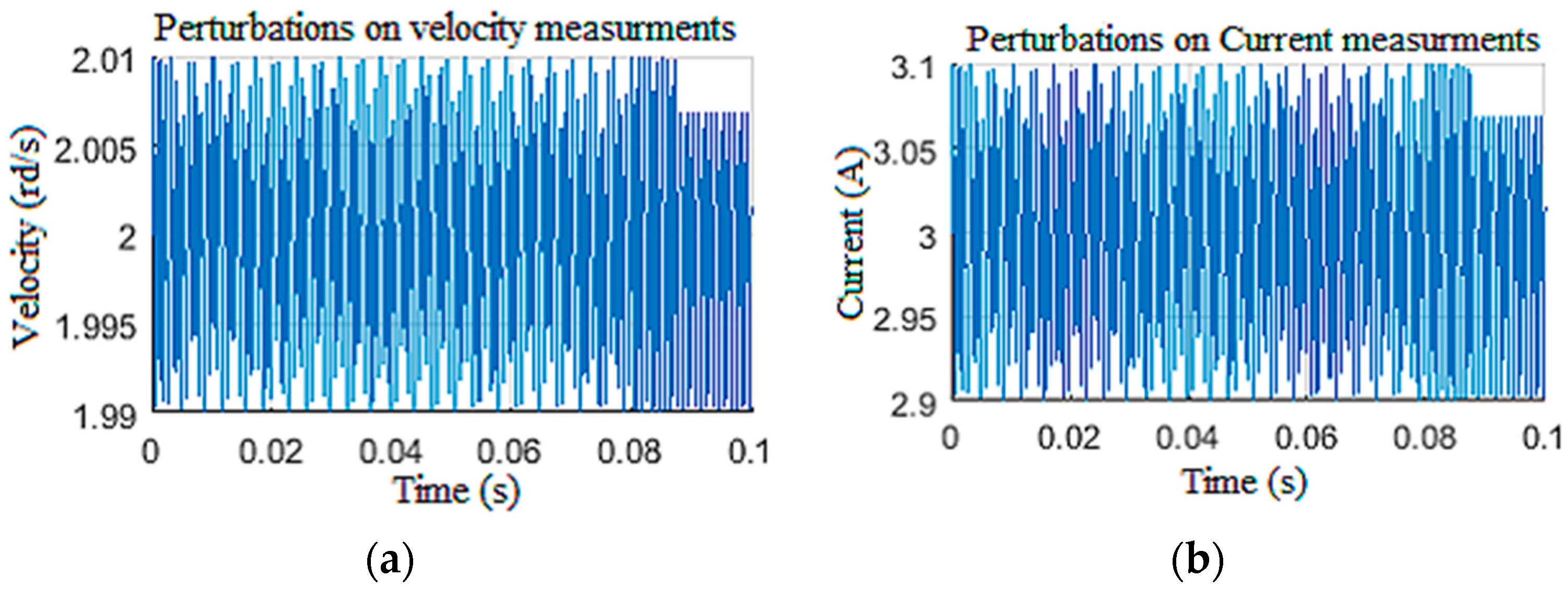
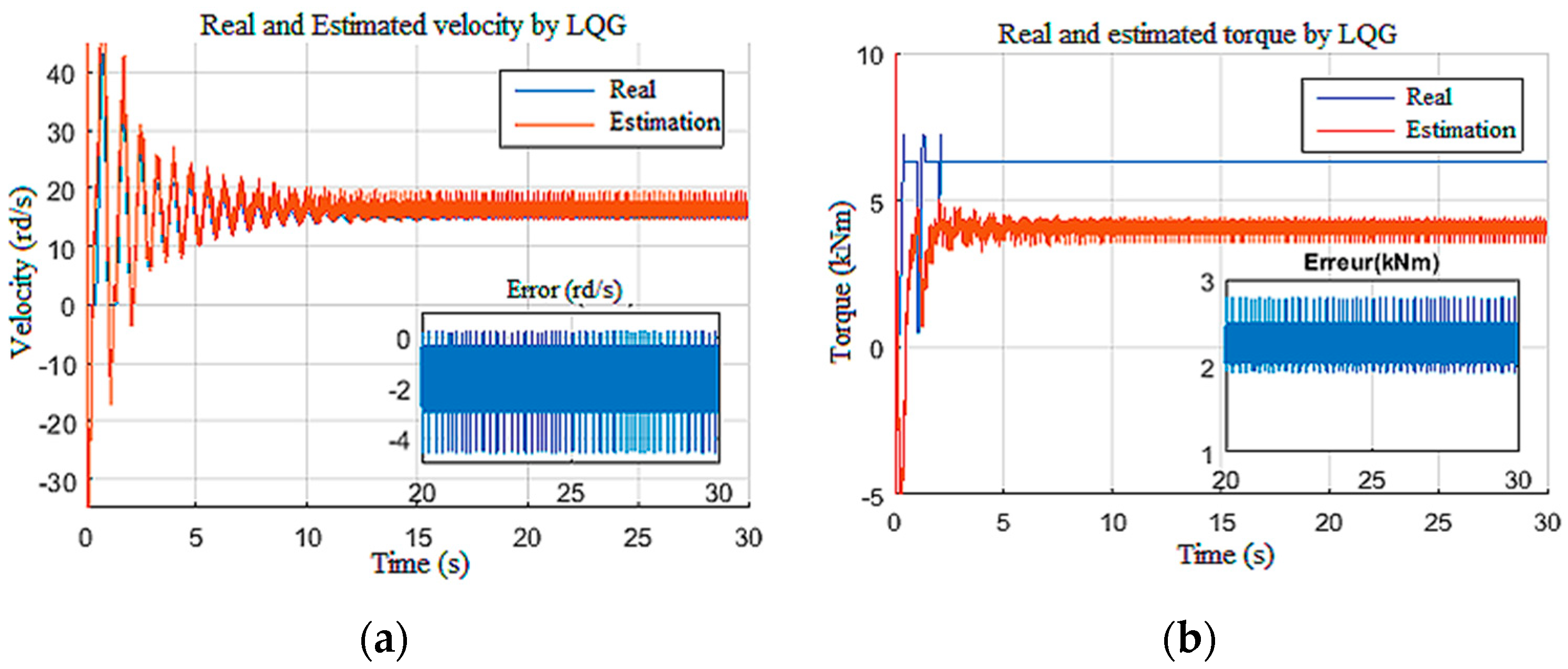
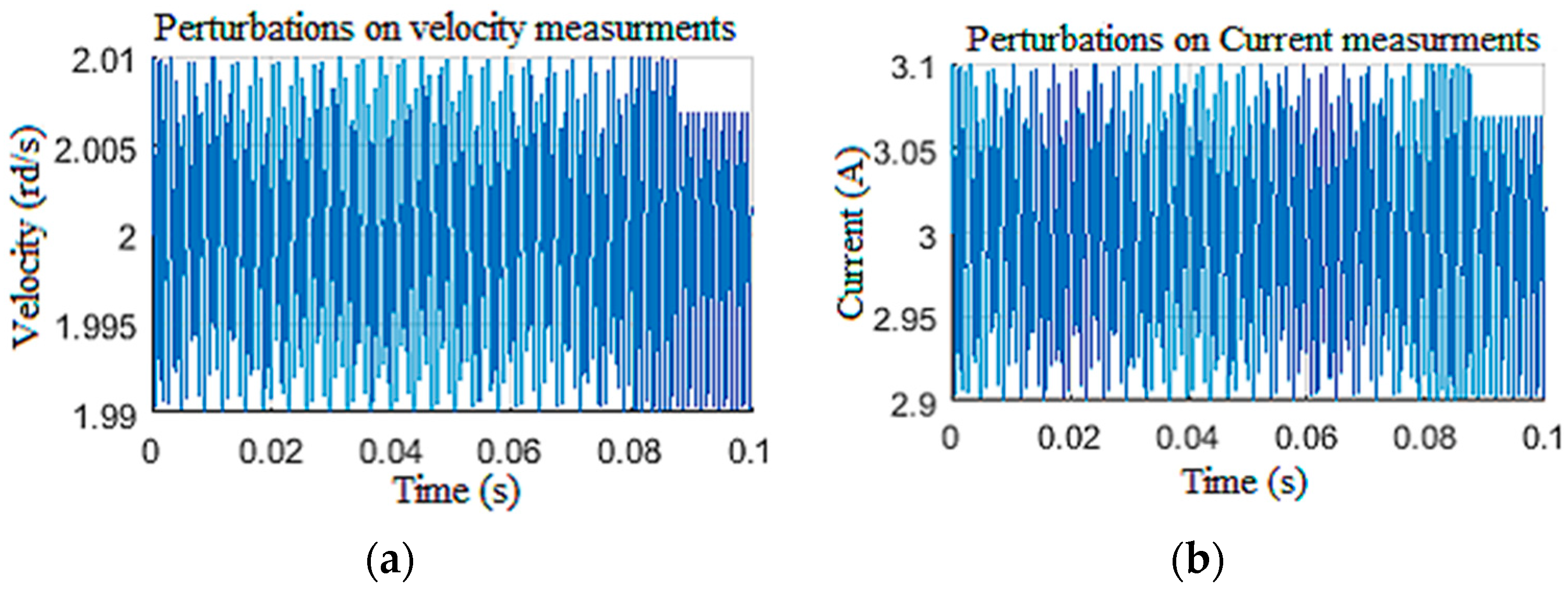
4.1.3. Disturbed Measurements
4.1.4. Parametric Variation
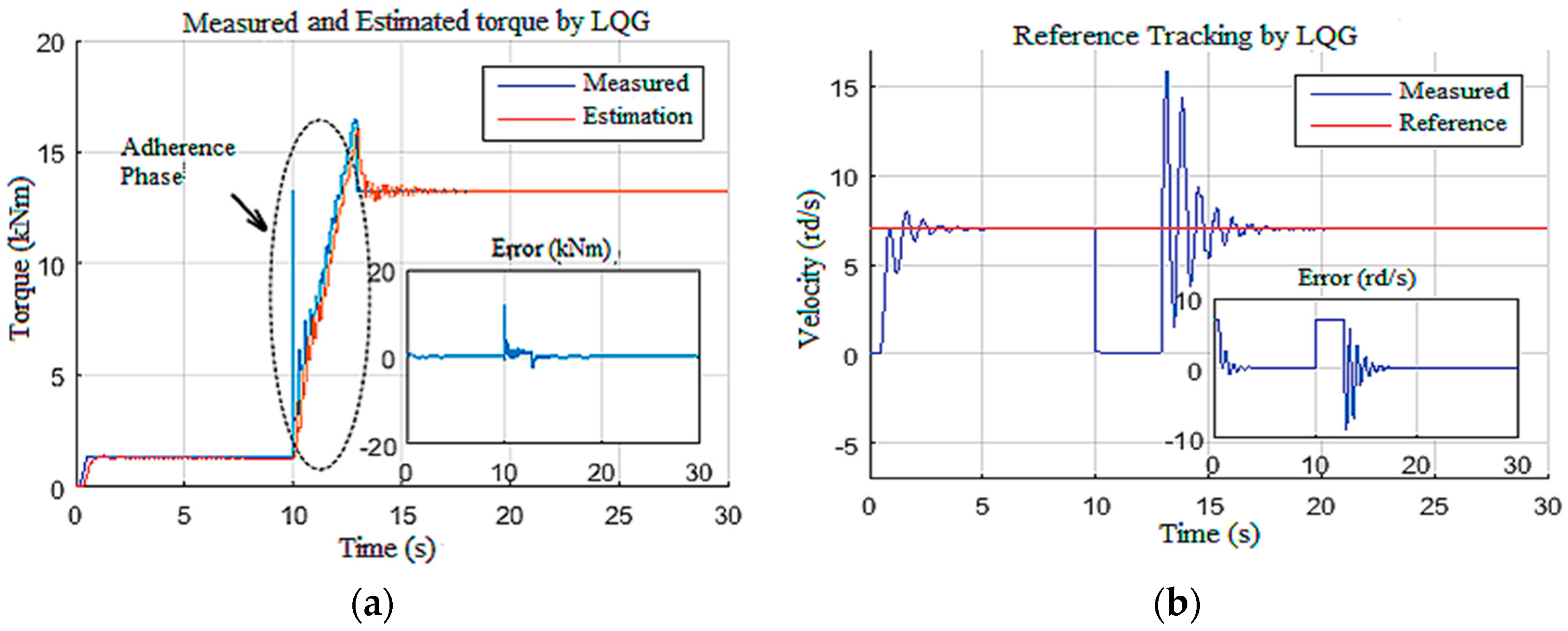
4.2. Observer-Based Controller’s Performance Tests
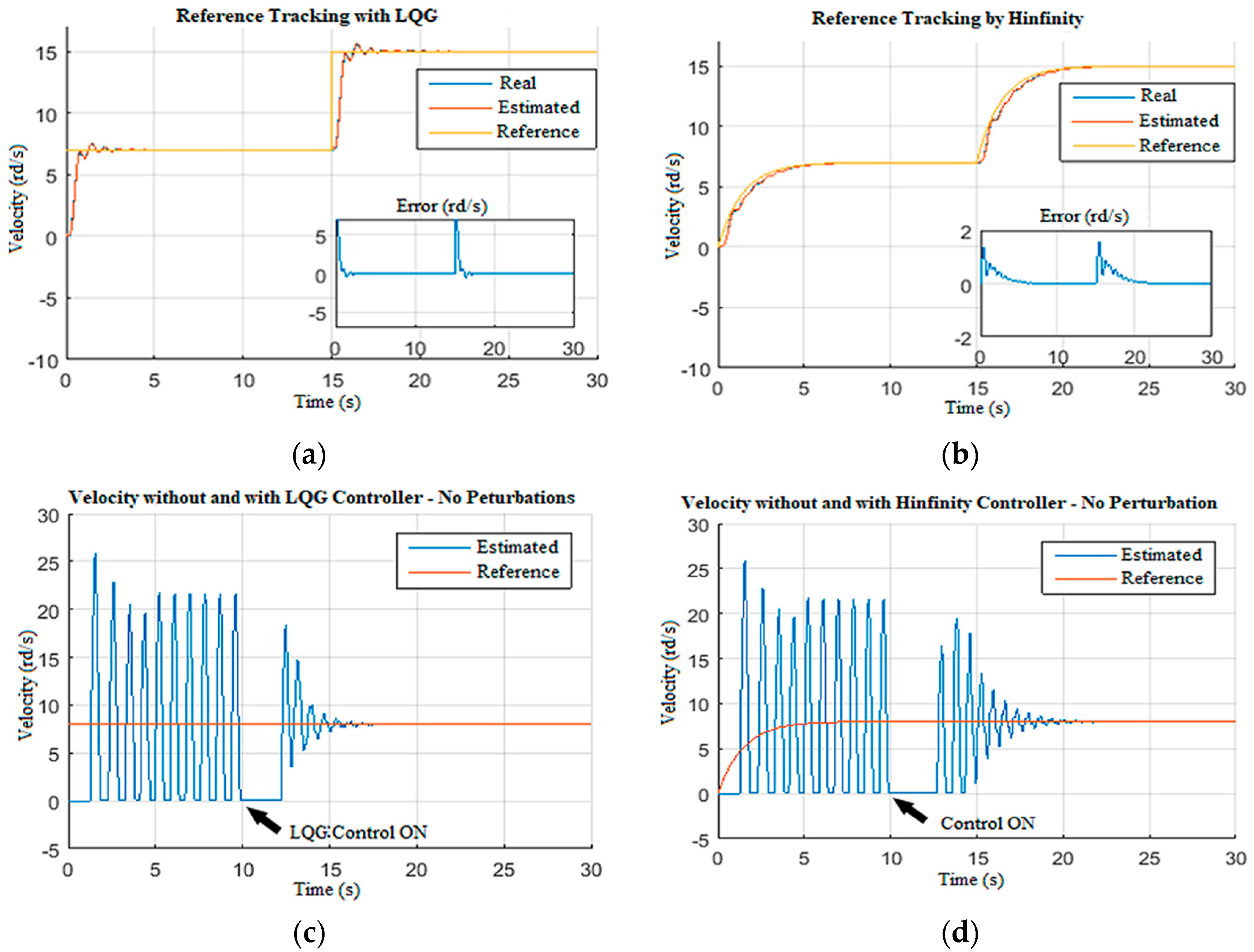
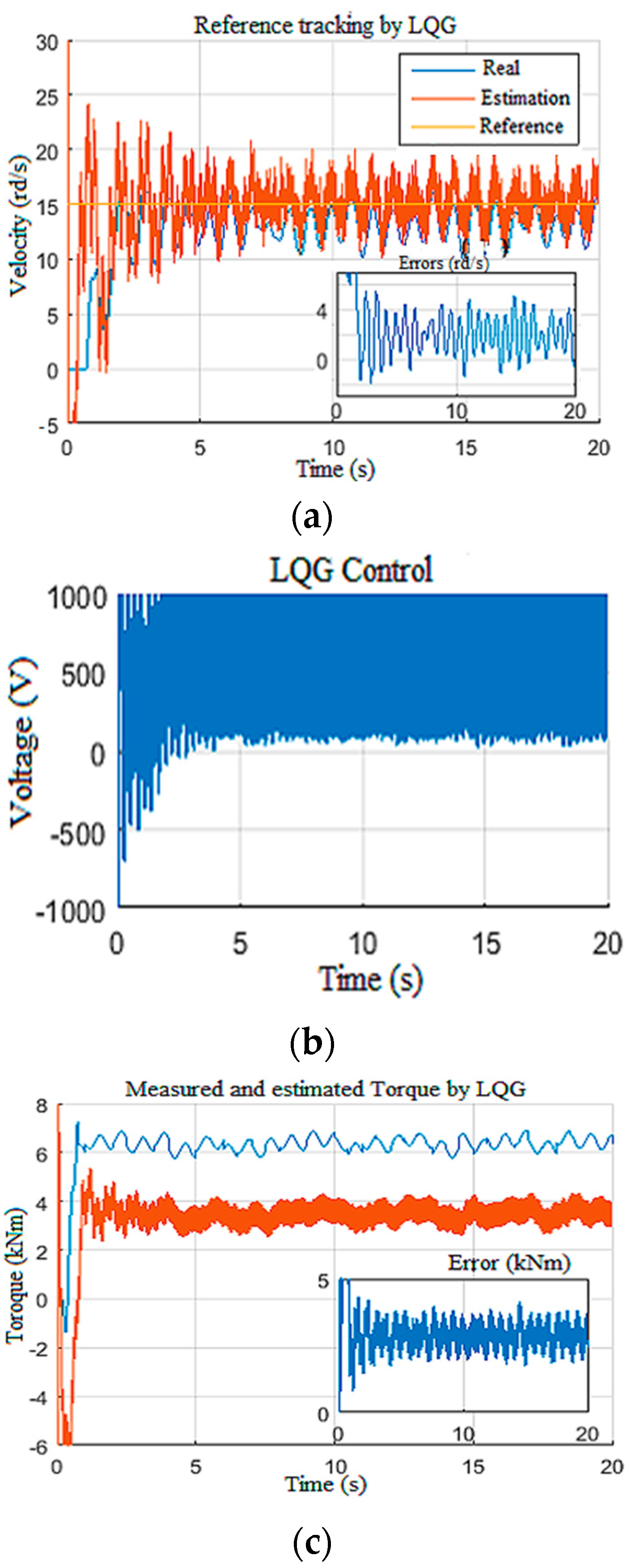
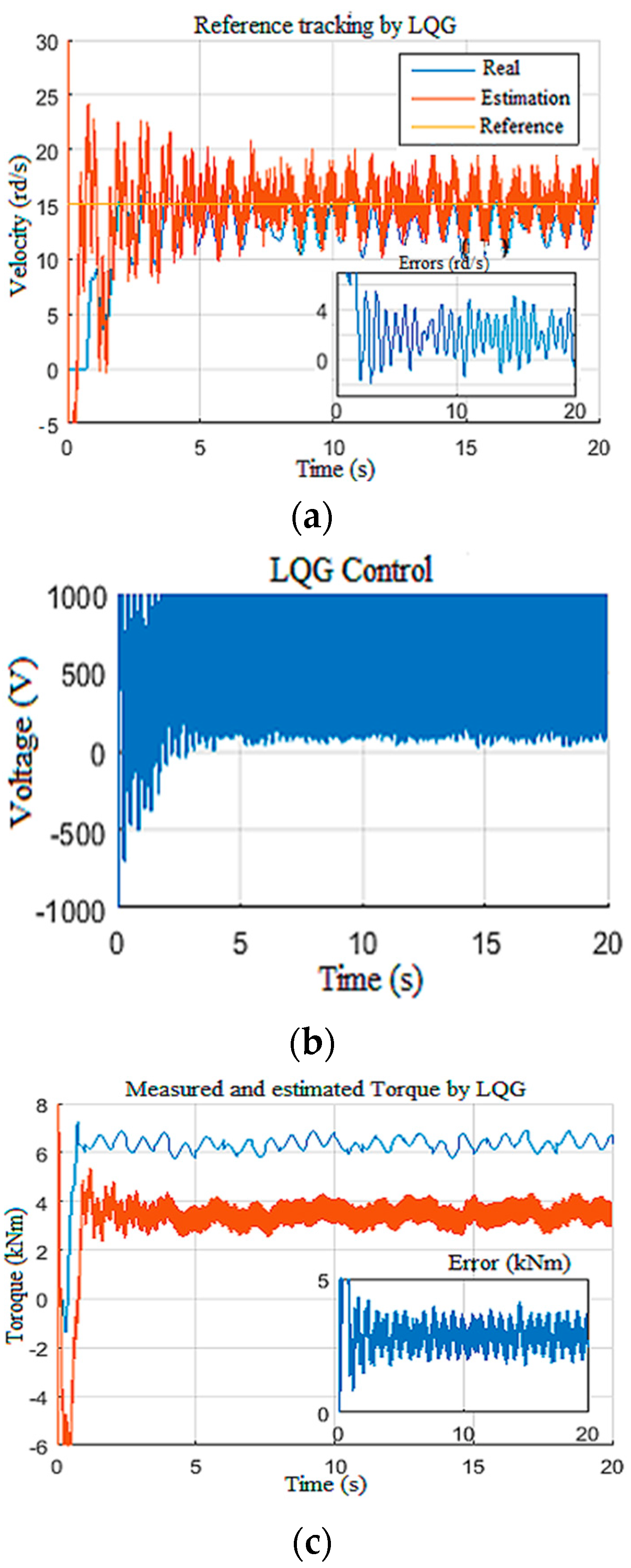
4.2.1. Reference Tracking
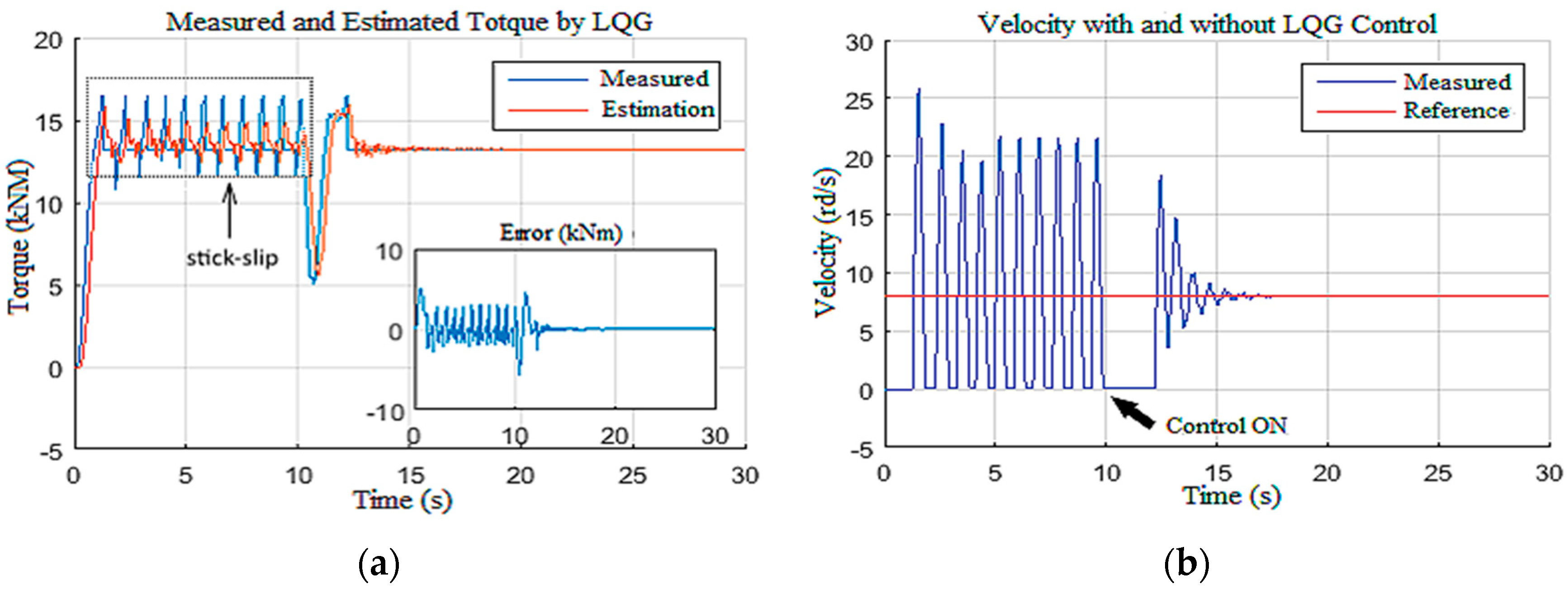
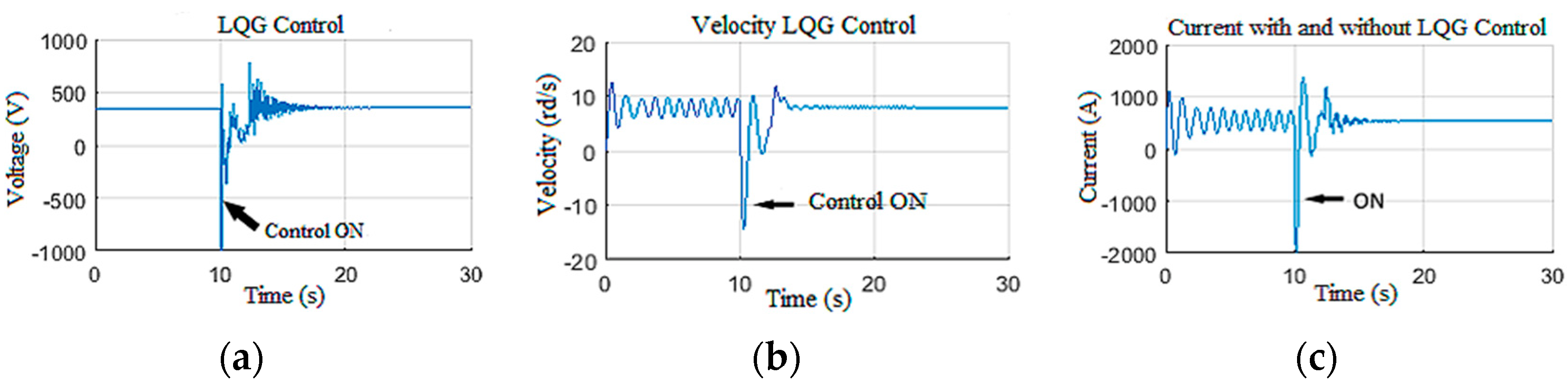
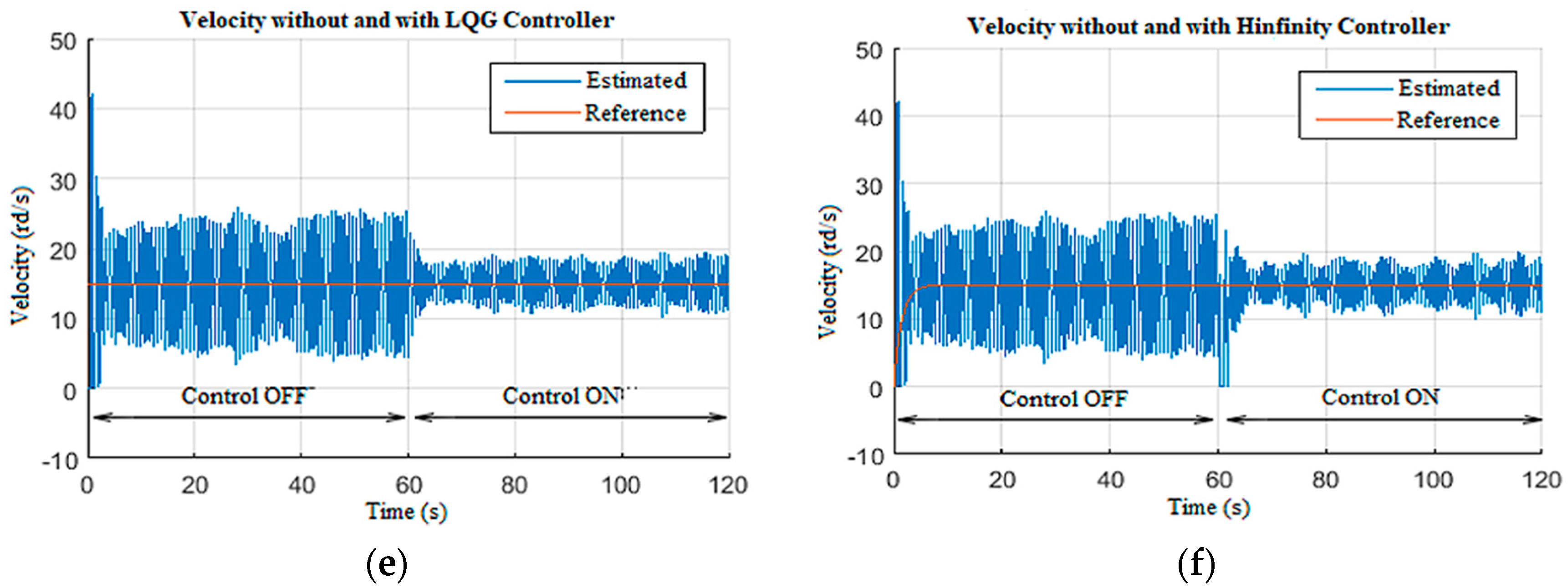
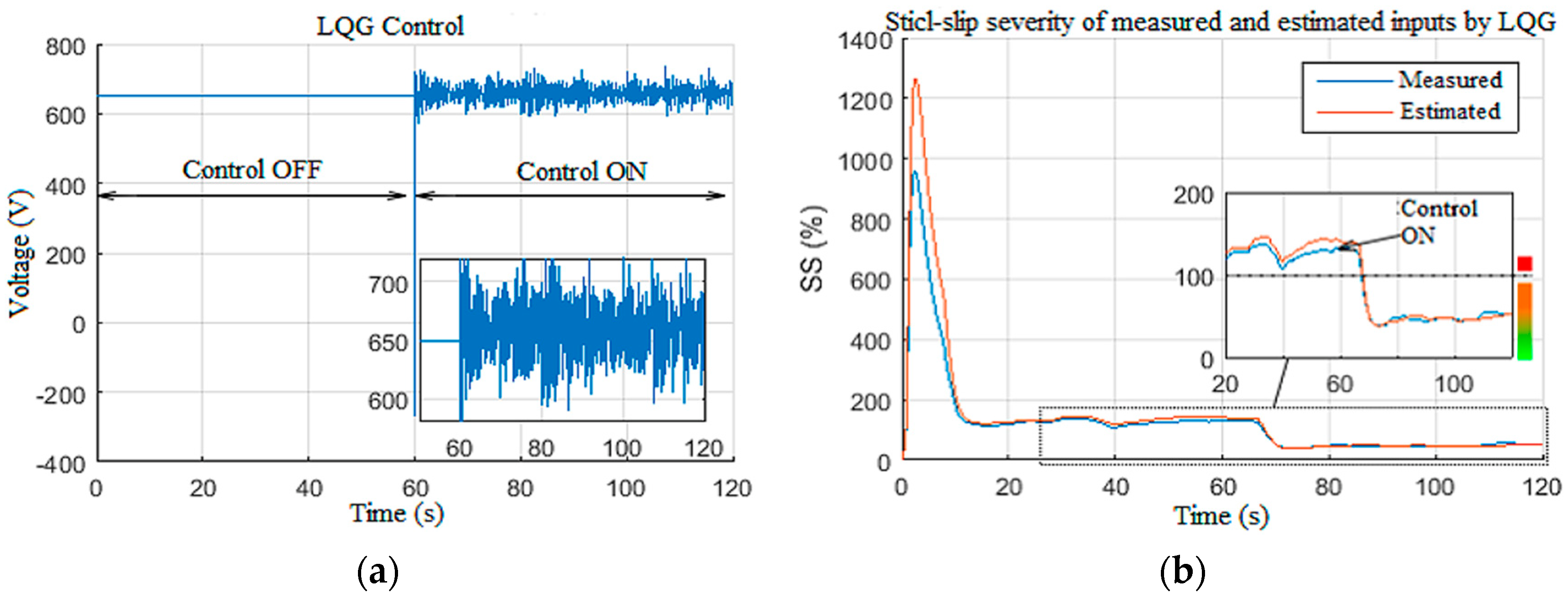
4.2.2. Stick-Slip Suppression
4.2.3. Structured Disturbance Filtering
5. Performance Limits
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Mendil, C.; Kidouche, M.; Doghmane, M.Z. Modeling of Hydrocarbons Rotary Drilling Systems Under Torsional Vibrations: A Survey. In Artificial Intelligence and Renewables towards an Energy Transition. ICAIRES 2020; Lecture Notes in Networks and Systems; Springer: Cham, Switzerland, 2020; Volume 174. [Google Scholar] [CrossRef]
- Kessai, I.; Benammar, S.; Doghmane, M.Z.; Tee, K.F. Drill Bit Deformations in Rotary Drilling Systems under Large-Amplitude Stick-Slip Vibrations. Appl. Sci. 2020, 10, 6523. [Google Scholar] [CrossRef]
- Kidouche, M.; Riane, R. On the design of proportional integral observer for a rotary drilling system. In Proceeding of the 8th CHAOS Conference Proceedings, Paris, France, 26–29 May 2015; Henri Poincaré Institute: Paris, France, 2005. [Google Scholar]
- Richard, T.; Germay, C.; Detournay, E. A simplified model to explore the root cause of stick-slip vibrations in drilling systems with drag bits. J. Sound Vib. 2007, 305, 432–456. [Google Scholar] [CrossRef]
- Detournay, E.; Defourny, P. A phenomenological model for the drilling action of drag bits. Int. J. Rock Mech. Min. Sci. Geomech. Abstr. 1992, 29, 13–23. [Google Scholar] [CrossRef]
- Mendil, C.; Kidouche, M.; Doghmane, M.Z. Sliding Mode Controller Design for Torsional Vibrations Minimization Under Rock-Bit Interaction Effects. In Artificial Intelligence and Heuristics for Smart Energy Efficiency in Smart Cities. IC-AIRES 2021; Hatti, M., Ed.; Lecture Notes in Networks and Systems; Springer: Cham, Switzerland, 2021; Volume 361. [Google Scholar] [CrossRef]
- Kelekci, E.; Kizir, S. Trajectory and vibration control of a flexible joint manipulator using interval type-2 fuzzy logic. ISA Trans. 2019, 94, 218–233. [Google Scholar] [CrossRef]
- Runia, D.J.; Dwars, S.; Stulemeijer, P.J.M. A brief history of the Shell Soft Torque Rotary System and some recent case studies. In Proceedings of the SPE/IADC Drilling Conference, Amsterdam, The Netherlands, 5–7 March 2013. [Google Scholar] [CrossRef]
- Johannessen, M.K. Stick-Slip Prevention of Drill Strings Using Nonlinear Model Reduction and Nonlinear Model Predictive Control. Ph.D. Thesis, Norwegian University of Science and Technology, Trondheim, Norway, 2010. [Google Scholar]
- Abdulgalil, F.; Siguerdidjane, H. Nonlinear Friction Compensation Design for Suppressing Stick Slip Oscillations in Oil Well Drillstrings. IFAC Proc. 2004, 37, 769–773. [Google Scholar] [CrossRef]
- Navarro-Lopez, E.M.; Suarez, R. Practical approach to modelling and controlling stick-slip oscillations in oilwell drillstrings. In Proceedings of the 2004 IEEE International Conference on Control Applications, Taipei, Taiwan, 2–3 September 2004; IEEE: Piscataway, NJ, USA, 2004. [Google Scholar] [CrossRef] [Green Version]
- Zribi, M.K.M.; Lamont, L.E.L. Robust µ-synthesis controllers for suppressing stick-slip induced vibrations in oil well drill strings. Multibody Syst. Dyn. 2010, 23, 191–207. [Google Scholar] [CrossRef]
- Vromen, T.G.M. Control of Stick-Slip Vibrations in Drilling Systems. Ph.D. Thesis, Eindhoven University of Technology, Eindhoven, The Netherlands, 2015. [Google Scholar]
- Doghmane, M.Z.; Bacetti, A.; Kidouche, M. Stick-Slip Vibrations Control Strategy Design for Smart Rotary Drilling Systems. In Artificial Intelligence and Renewables Towards an Energy Transition. ICAIRES 2020; Hatti, M., Ed.; Lecture Notes in Networks and Systems; Springer: Cham, Switzerland, 2020; Volume 174. [Google Scholar] [CrossRef]
- Hong, L.; Girsang, I.P.; Dhupia, J.S. Identification and control of stick–slip vibrations using Kalman estimator in oil-well drill strings. J. Pet. Sci. Eng. 2016, 140, 119–127. [Google Scholar] [CrossRef]
- Fu, M.; Zhang, P.; Li, J.; Wu, J. Observer and reference governor-based control strategy to suppress stick-slip vibrations in oil well drill-string. J. Sound Vib. 2019, 457, 37–50. [Google Scholar] [CrossRef]
- Detournay, E.; Richard, T.; Shepherd, M. Drilling response of drag bits: Theory and experiment. Int. J. Rock Mech. Min. Sci. 2008, 45, 1347–1360. [Google Scholar] [CrossRef]
- Cai, Z.; Xuzhi, L.; Wu, M.; Chengda, L.; Luefeng, C. Equivalent-input-disturbance-based robust control of drilling trajectory with weight-on-bit uncertainty in directional drilling. ISA Trans. 2021. In Press. [Google Scholar] [CrossRef]
- Kessai, I.; Doghmane, M.Z.; Benammar, S. Weight-On-Bit Variations Analyses in the Drillstring of Rotary Drilling Systems Under Stick-Slip Vibrations. In Artificial Intelligence and Heuristics for Smart Energy Efficiency in Smart Cities. IC-AIRES 2021; Hatti, M., Ed.; Lecture Notes in Networks and Systems; Springer: Cham, Switzerland, 2021; Volume 361. [Google Scholar] [CrossRef]
- Trujillo-Franco, L.G.; Silva-Navarro, G.; Beltran-Carbajal, F.; Campos-Mercado, E.; Abundis-Fong, H.F. On-Line Modal Parameter Identification Applied to Linear and Nonlinear Vibration Absorbers. Actuators 2020, 9, 119. [Google Scholar] [CrossRef]
- Baz, A.M.; Poh, S.; Fedor, J.V. Independent Modal Space Control With Positive Position Feedback. J. Dyn. Syst. Meas. Control.-Trans. ASME 1992, 114, 96–103. [Google Scholar] [CrossRef]
- Serrarens, A.F.A.; Van de Molengraft, M.J.G.; Kok, J.J.; Van den Steen, L. H∞ control for suppressing stick-slip in oil well drillstrings. IEEE Control. Syst. Mag. 1998, 18, 19–30. [Google Scholar] [CrossRef]
- Tian, J.; Wang, J.; Zhou, S.; Yang, Y.; Dai, L. Study of stick–slip suppression and robustness to parametric uncertainty in drill strings containing torsional vibration tool using sliding-mode control. Proc. Inst. Mech. Eng. Part K J. Multi-Body Dyn. 2021, 235, 635–667. [Google Scholar] [CrossRef]
- Riane, R.; Doghmane, M.Z.; Kidouche, M.; Djezzar, S. Observer-Based H∞ Controller Design for High Frequency Stick-Slip Vibrations Mitigation in Drill-String of Rotary Drilling Systems. Vibration 2022, 5, 264–289. [Google Scholar] [CrossRef]
- Zhou, D.; Li, J.; Zhang, K. Amplitude control of the track-induced self-excited vibration for a maglev system. ISA Trans. 2014, 53, 1463–1469. [Google Scholar] [CrossRef]
- Mendil, C.; Kidouche, M.; Doghmane, M.Z. A Study of the Parametric Variations Influences on Stick-Slip Vibrations in Smart Rotary Drilling Systems. In Artificial Intelligence and Renewables Towards an Energy Transition. ICAIRES 2020; Hatti, M., Ed.; Lecture Notes in Networks and Systems; Springer: Cham, Switzerland, 2020; Volume 174. [Google Scholar] [CrossRef]
- Liu, J.; Zhou, F.; Zhao, C.; Wang, Z. Mechanism analysis and suppression strategy research on permanent magnet synchronous generator wind turbine torsional vibration. ISA Trans. 2019, 92, 118–133. [Google Scholar] [CrossRef]
- Riane, R.; Kidouche, K.; Illoul, R.; Doghmane, M.Z. Unknown Resistive Torque Estimation of a Rotary Drilling System Based on Kalman Filter. IETE J. Res. 2020. [Google Scholar] [CrossRef]
- Doghmane, M.Z.; Kidouche, M.; Ahriche, A. Decentralized Overlapping Control Design with Application to Rotary Drilling System. IETE J. Res. 2021. [Google Scholar] [CrossRef]
- Mendil, C.; Kidouche, M.; Doghmane, M.Z.; Benammar, S.; Tee, K.F. Rock-Bit Interaction Effects on High-Frequency Stick-Slip Vibrations Severity in Rotary Drilling Systems. Multidiscip. J. Modeling Mater. Struct. 2021, 17, 1007–1023. [Google Scholar] [CrossRef]
- Mendil, C.; Kidouche, M.; Doghmane, M.Z. Hybrid Backstepping Sliding Mode Controller for Stick–slip Vibrations Mitigation in Rotary Drilling Systems. IETE J. Res. 2021. [Google Scholar] [CrossRef]
- Riane, R. Contribution à la Synthèse d’un Observateur-Contrôleur Pour Système de Forage Rotary. Ph.D. Thesis, University M’hamed Bougara, Boumeres, Algeria, 2021. [Google Scholar]
- Mendil, C.; Kidouche, M.; Doghmane, M.Z. Automatic control of a heat exchanger in a nuclear power station: The classical and the fuzzy methods. In Proceedings of the International Conference on Advanced Electrical Engineering, ICAEE 2019, Algiers, Algeria, 19–21 November 2019; IEEE: Algiers, Algeria, 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Kadali, R.; Huang, B. Controller performance analysis with LQG benchmark obtained under closed loop conditions. ISA Trans. 2002, 41, 521–537. [Google Scholar] [CrossRef]
- Riane, R.; Kidouche, M.; Doghmane, M.Z.; Illoul, R. Modeling of Torsional Vibrations Dynamic in Drill-String by Using PI-Observer. In Proceedings of the 4th International Conference on Electrical Engineering and Control Applications, ICEECA 2019, Constantine, Algeria, 17–19 December 2019; Bououden, S., Chadli, M., Ziani, S., Zelinka, I., Eds.; Lecture Notes in Electrical Engineering; Springer: Singapore, 2019; Volume 682. [Google Scholar] [CrossRef]
- Maneri, E.; Gawronski, W. LQG controller design using GUI: Application to antennas and radio-telescopes. ISA Trans. 2000, 39, 243–264. [Google Scholar] [CrossRef]
- Mendil, C.; Kidouche, M.; Doghmane, M.Z. Hybrid sliding PID controller for torsional vibrations mitigation in rotary drilling systems. Indones. J. Electr. Eng. Comput. Sci. 2021, 22, 146–158. [Google Scholar] [CrossRef]
- Tang, T.; Xu Niu, S.; Yang, T.; Qi, B. Suppressions of vibration in the Tip-Tilt mirror control system by add-on controller. ISA Trans. 2020, 102, 245–250. [Google Scholar] [CrossRef]
- Zhu, X.; Tang, L.; Yang, Q. A Literature Review of Approaches for Stick-Slip Vibration Suppression in Oilwell Drillstring. Adv. Mech. Eng. 2014, 6, 17. [Google Scholar] [CrossRef]
- Puebla, H.; Alvazer-ramirez, J. Suppression of stick-slip in drillstrings: A control approach based on modeling error compensation. J. Sound Vib. 2008, 310, 881–901. [Google Scholar] [CrossRef]
- Wasilewski, M.; Pisarski, D.; Konowrocki, R.; Bajer, C.I. A new efficient adaptive control of torsional vibrations induced by switched nonlinear disturbances. Int. J. Appl. Math. Comput. Sci. 2019, 29, 285–303. [Google Scholar] [CrossRef] [Green Version]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Stick-Slip Severity Level | Classification | SS% |
|---|---|---|
| 0 | Very low | 0 to 50% |
| 1 | Low | 50% to 100% |
| 2 | Mean | 100 to 150% |
| 3 | High | 150 to 200% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Riane, R.; Doghmane, M.Z.; Kidouche, M.; Tee, K.F.; Djezzar, S. Stick-Slip Vibration Suppression in Drill String Using Observer-Based LQG Controller. Sensors 2022, 22, 5979. https://doi.org/10.3390/s22165979
Riane R, Doghmane MZ, Kidouche M, Tee KF, Djezzar S. Stick-Slip Vibration Suppression in Drill String Using Observer-Based LQG Controller. Sensors. 2022; 22(16):5979. https://doi.org/10.3390/s22165979
Chicago/Turabian StyleRiane, Rami, Mohamed Zinelabidine Doghmane, Madjid Kidouche, Kong Fah Tee, and Sofiane Djezzar. 2022. "Stick-Slip Vibration Suppression in Drill String Using Observer-Based LQG Controller" Sensors 22, no. 16: 5979. https://doi.org/10.3390/s22165979
APA StyleRiane, R., Doghmane, M. Z., Kidouche, M., Tee, K. F., & Djezzar, S. (2022). Stick-Slip Vibration Suppression in Drill String Using Observer-Based LQG Controller. Sensors, 22(16), 5979. https://doi.org/10.3390/s22165979