
Millimeter-Wave Radar Localization Using Indoor Multipath Effect


Abstract
:1. Introduction
- A perception model based on the multipath effect is proposed to solve the localization problem of indoor electronic devices. The model addresses the indoor high-precision localization problem by mining multipath information and using the target radial distance instead of the target Angle-of-Arrival (AoA).
- A model for extracting micro-Doppler at a specific distance is proposed for achieving dynamic object capture. The model solves the micro-Doppler feature-to-distance mapping by superimposing the Doppler information at a specific distance, which enhances the feature information on the distance plane of the object.
- The rule of constant radar 2D perceived area and perceived area on the same distance plane based on the multi-order reflection model is proposed. Based on this rule, the three-dimensional positioning problem of horizontally aligned antennas and the angular resolution problem in the case of insufficient antenna arrays are solved.
2. Related Work
2.1. Millimeter-Wave Radar Applications
2.2. Principles of Radar Perception
3. Multipath Assisted Localization
3.1. MAL Model Framework
- Module 1 is the first step for the MAL system to acquire information about the physical world. In this paper, we use the civilian millimeter-wave IWR1642 Boost development board to send out RF signals and acquire radar IF signals through the DCA1000EVM development board. The signal consists of a real part and an imaginary part. It contains static noise and dynamic targets in space. If we want to obtain the target position, we must perform the next step.
- Module 2 is the basis of the system. Based on module 1, we process the extracted IF signal. It extracts the distance information in the line of sight (LOS) and NLOS environments of the target. To improve the distance resolution of the MAL signal to the target, we first extract all range bins in the original signal and then analyze the Doppler information in each range bin. To avoid the target being interfered with by environmental noise, we obtain the discrete micro-Doppler features at each radial distance of the radar by superimposing the Doppler information in the same range bin for N frames. Finally, by comparing all the micro-Doppler features, the discrete point with the highest energy or the first micro-Doppler feature at a small range distance is identified as the target, and the LOS distance and NLOS distance of the target in the environment are obtained.
- Module 3 is the vital part of the system to obtain the vertical and horizontal position of the target. In this paper, a suitable MAL model is established for the multipath effect. After the input module 1 collects the LOS distance and NLOS distance of the target in the environment, module 2 uses the property of constant radar sensing area, combined with the help of the multipath effect, to calculate the vertical and horizontal distance of the target in space by the MAL model.
| Algorithm 1: Steps of MAL |
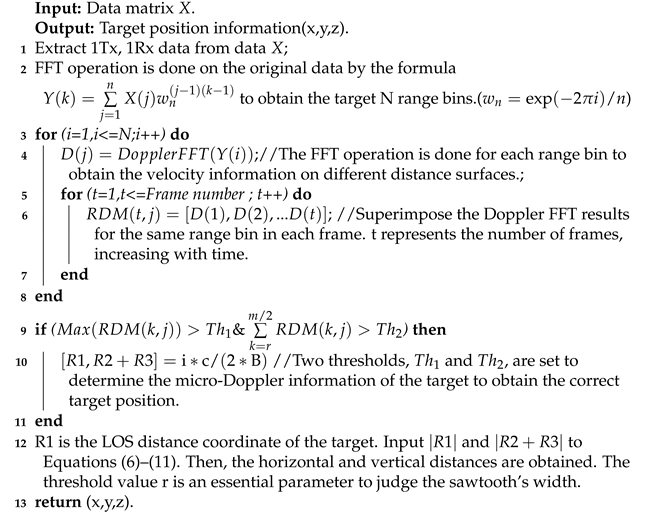 |
3.2. Multipath Effect
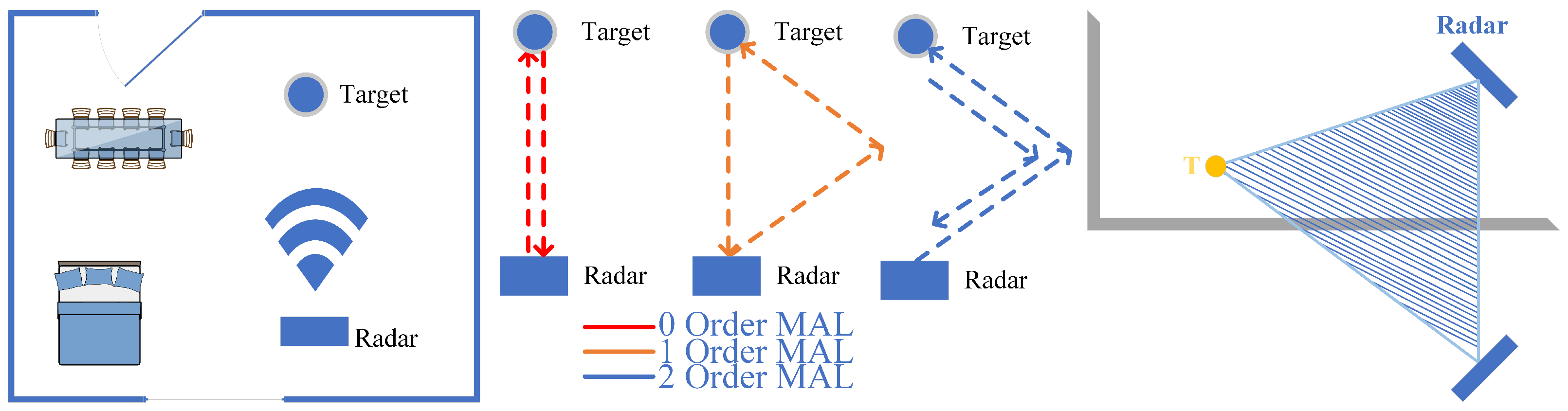
- The zeroth-order MAL: As the red path in Figure 4 shows, no reflection other than the target occurred during the electromagnetic wave propagation.
- The first-order MAL: As the orange path in Figure 4 shows, the electromagnetic wave only experienced a reflection other than the target during the propagation process.
- The second-order MAL: As the blue path in Figure 4 shows, the electromagnetic wave first reaches the wall and then returns to the radar through a path other than the red one. It has experienced two reflections other than the target.
3.3. Acquisition of Target Distance by Micro-Doppler Features
3.4. Horizontal Antenna 3D Location
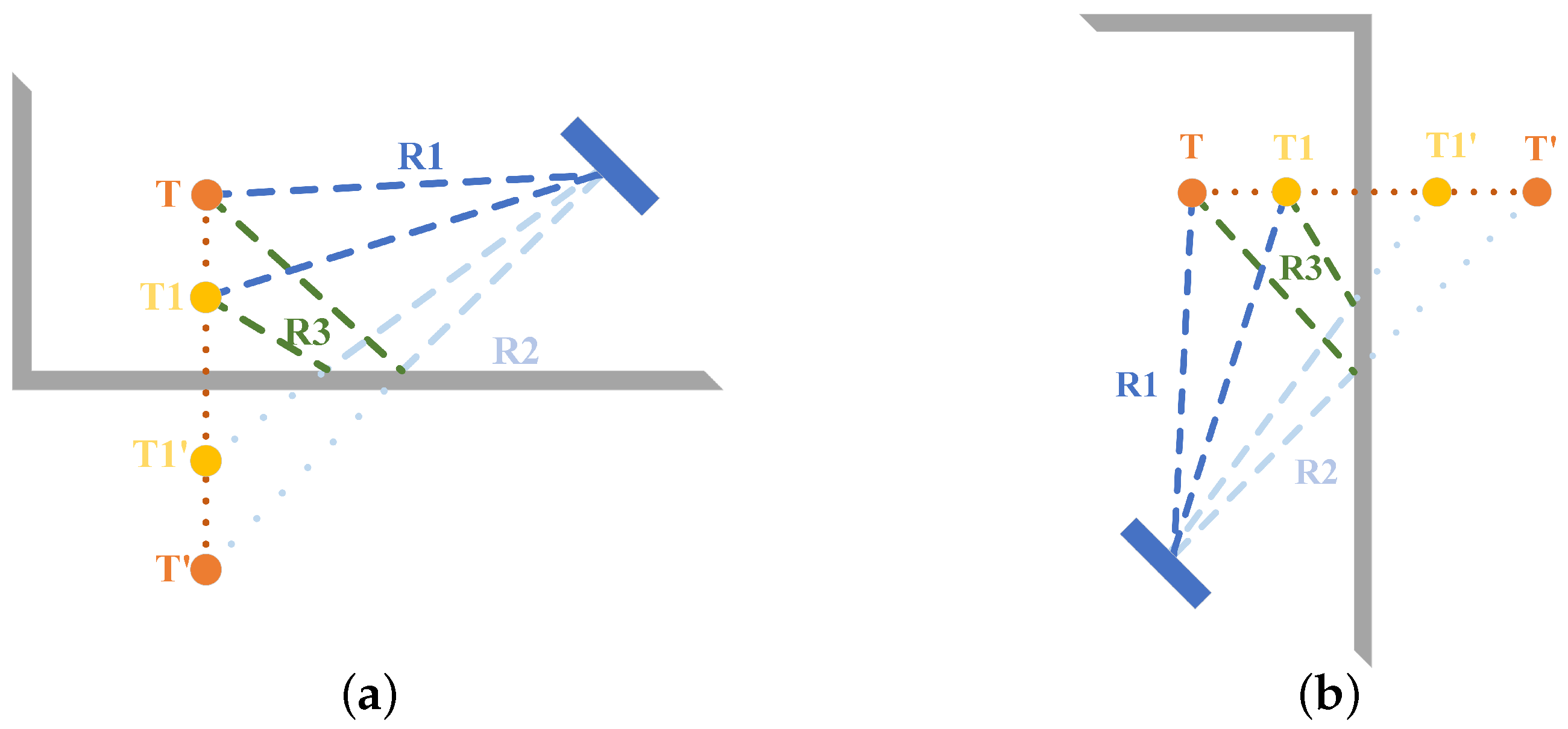
- The volume and wobble amplitude of the rigid target in an actual situation cannot be neglected. However, the MAL model focuses on the central location of the target, so we assume that the target and the radar are considered as one mass point.
- is the mirror image of to the ground, twice the distance from the radar to the ground. is the mirror image of to the ground.
- The 0th-order reflective linear path distance from the T target point to the radar antenna is . The second-order reflective linear path from the T target point to the radar antenna is . The T target point projection to radar projection distance is . The radar setting height is . Sn is the area of by Equation (7), and Pn is half of the perimeter of .
3.5. Single Antenna Horizontal Positioning
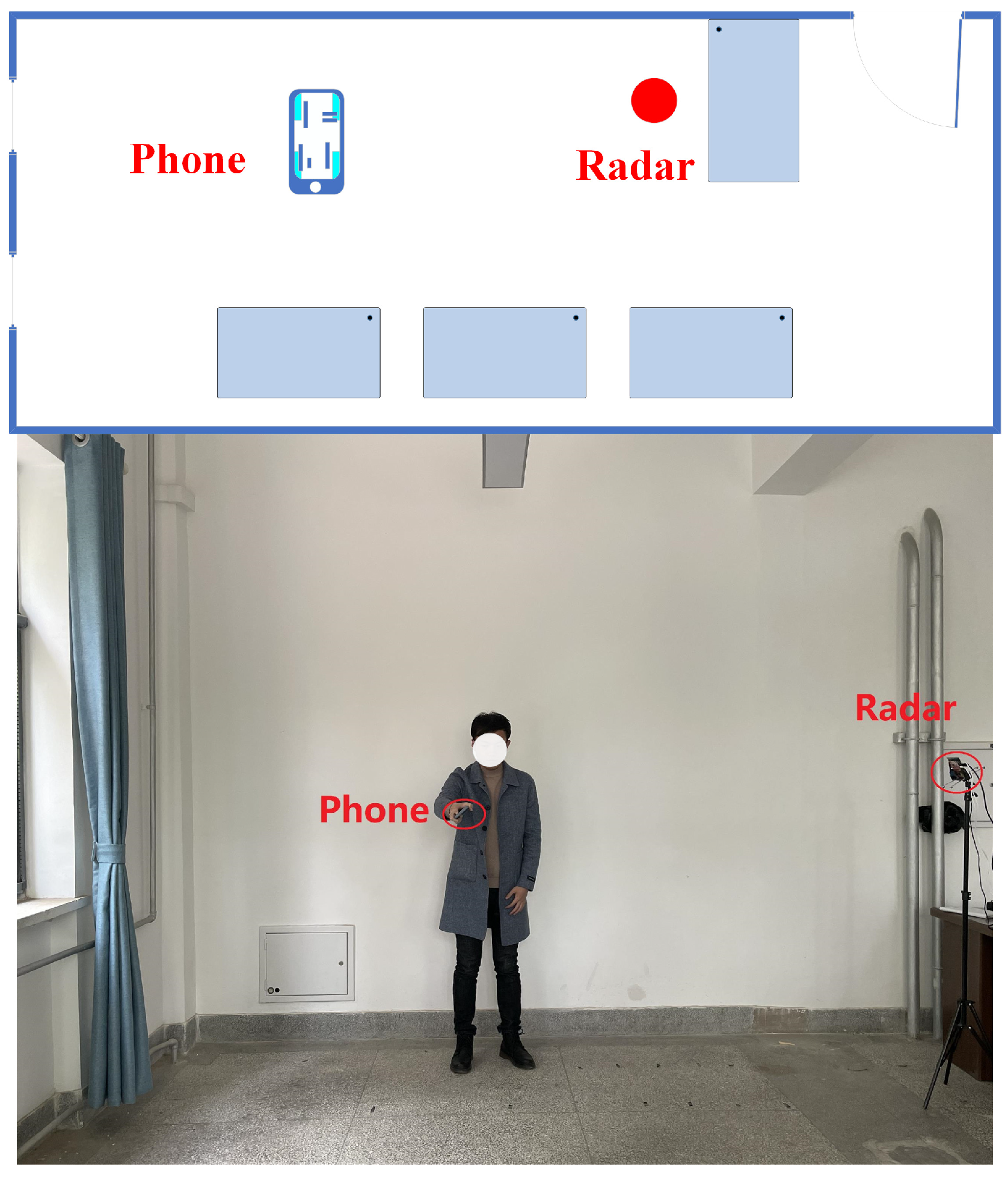
4. Experimental Analysis
4.1. Localization Error Analysis
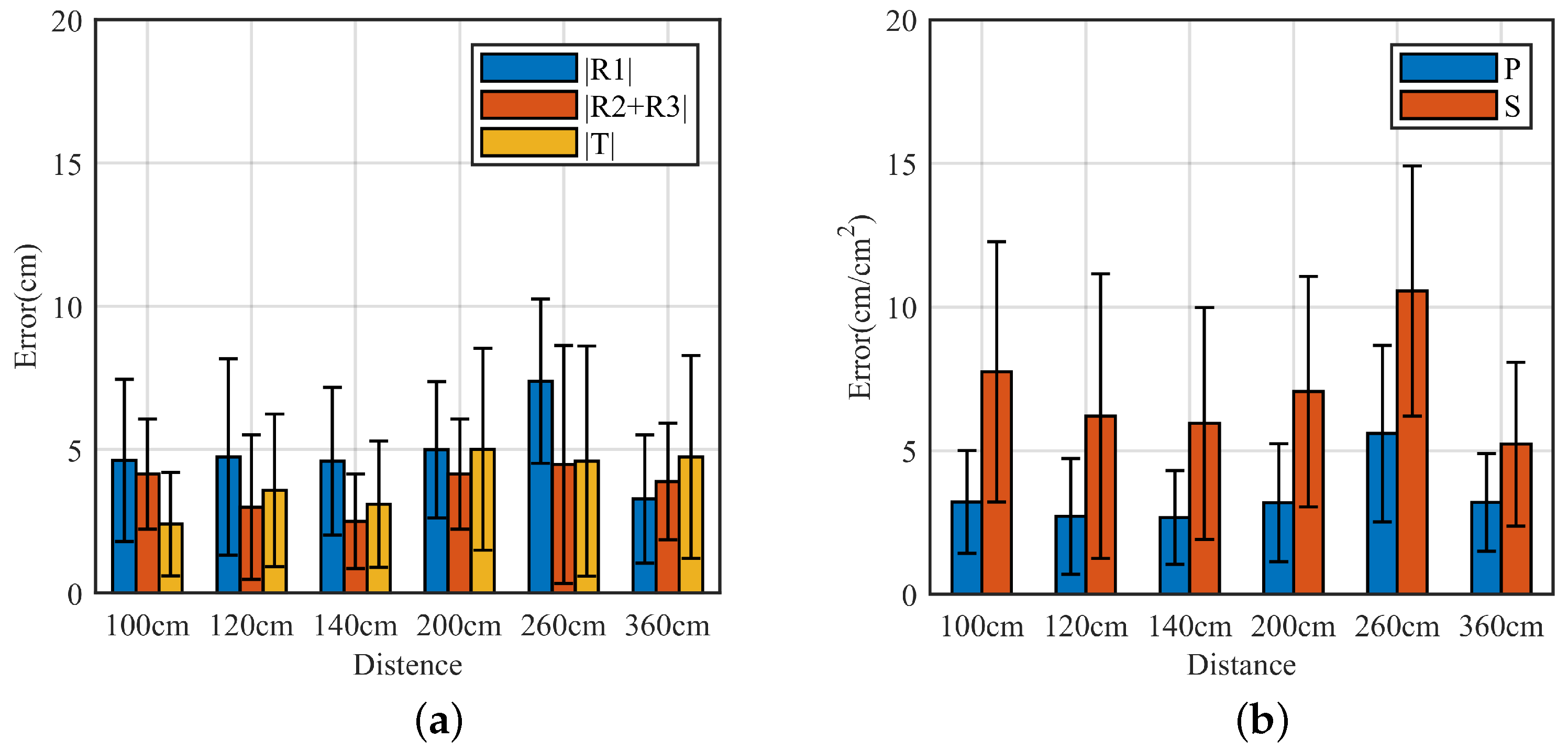
4.1.1. Vertical Positioning Error Analysis
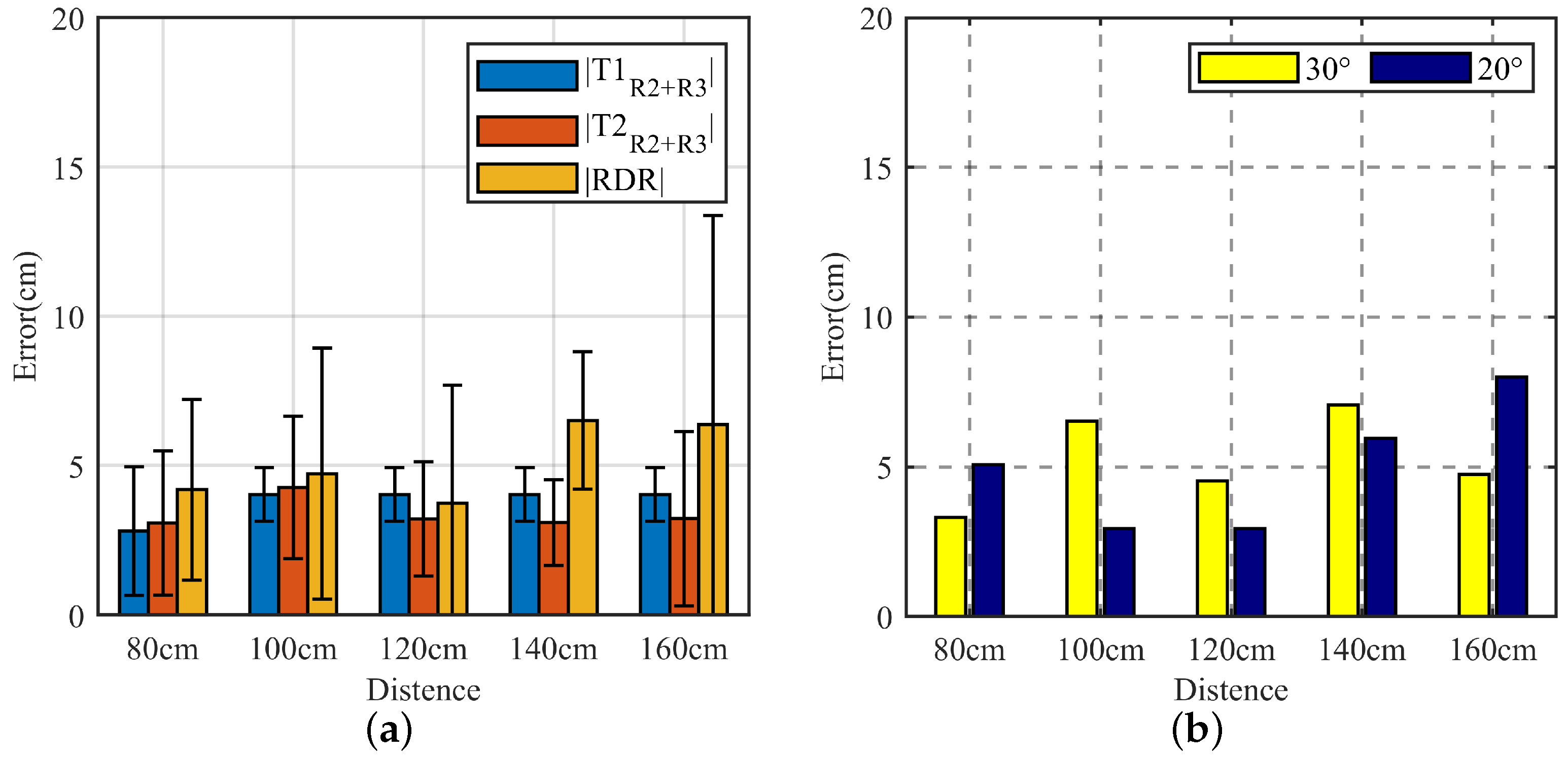
4.1.2. Horizontal Positioning Error Analysis
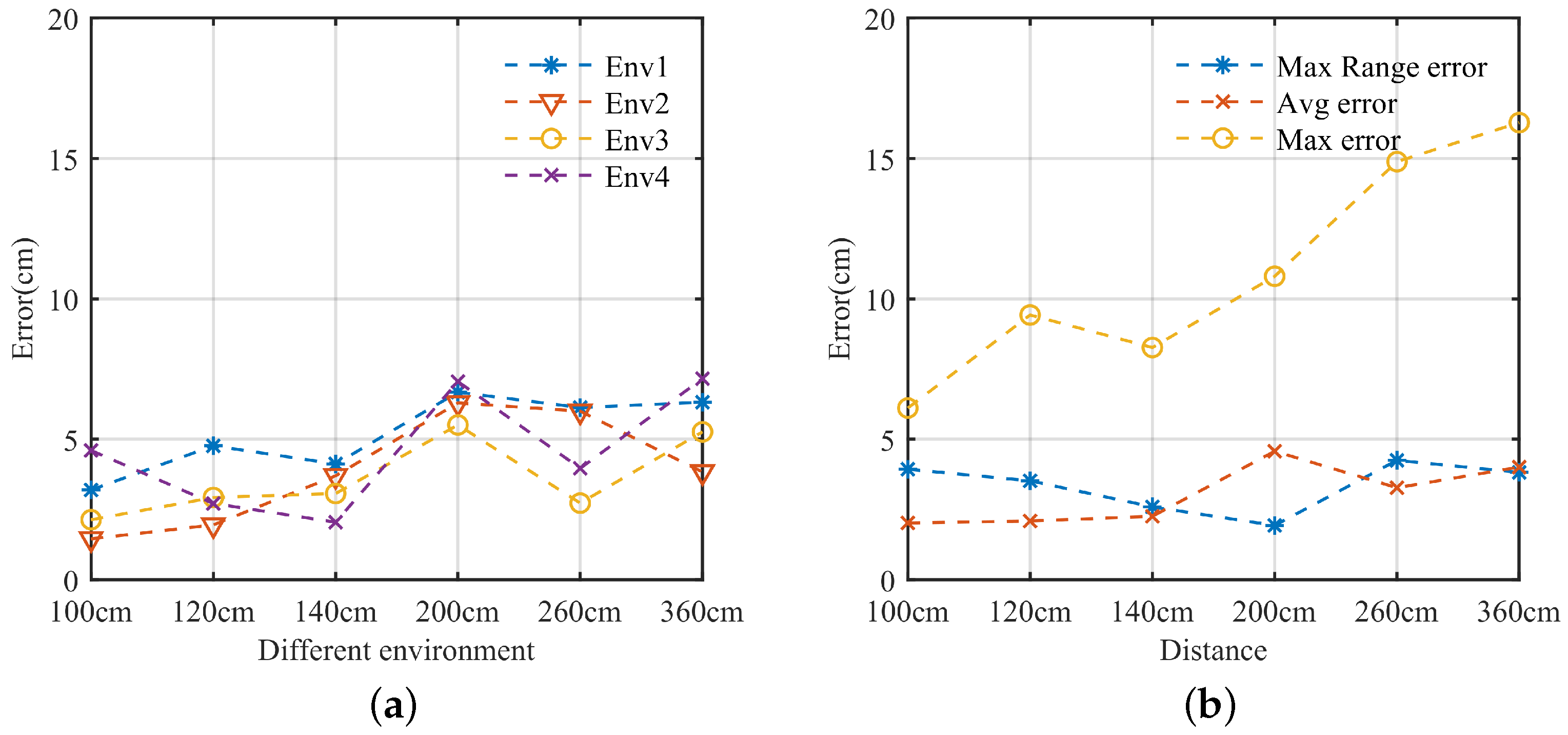
4.1.3. Analysis of Positioning Errors in Different Environments
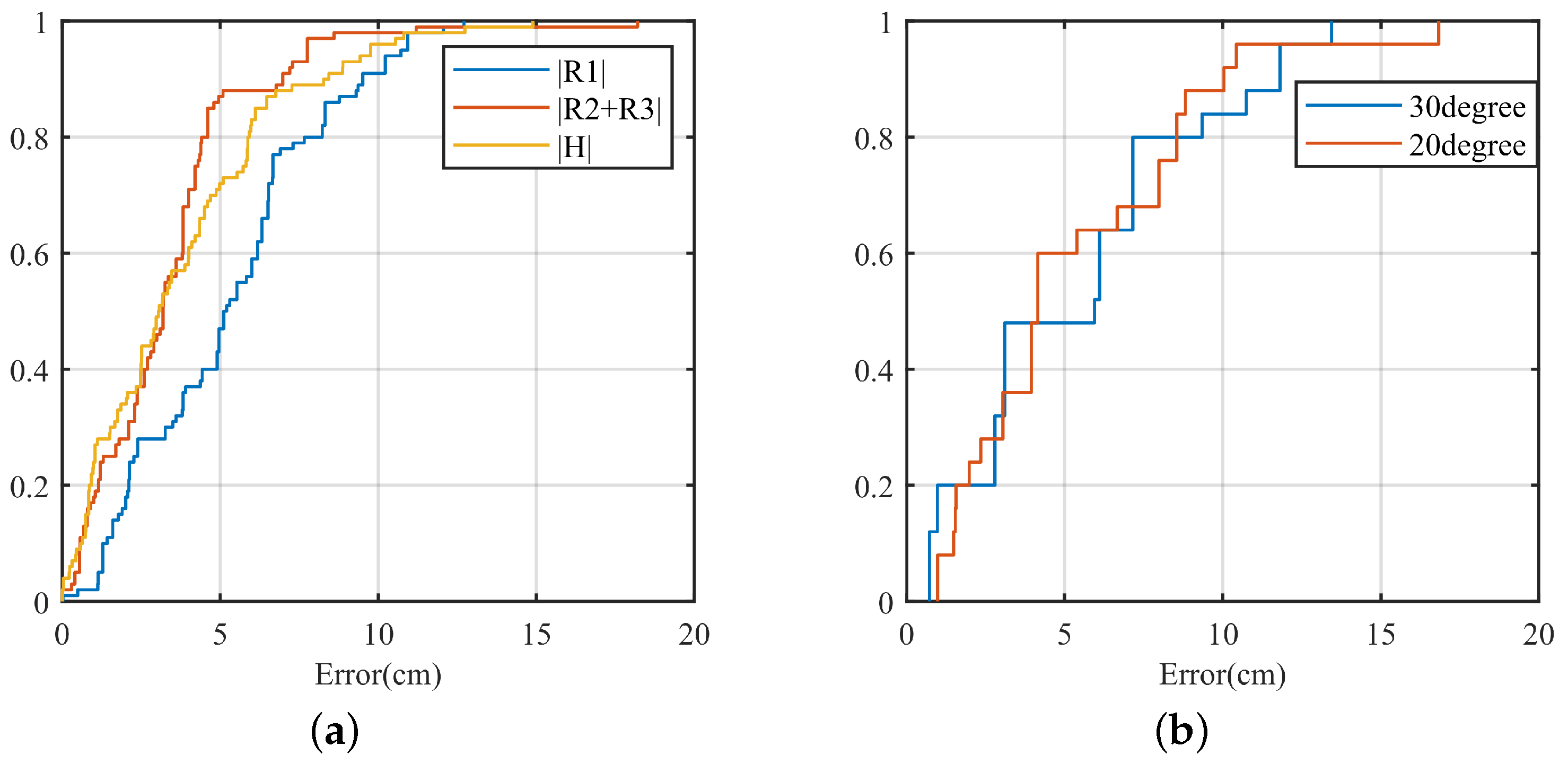
4.2. Model Analysis
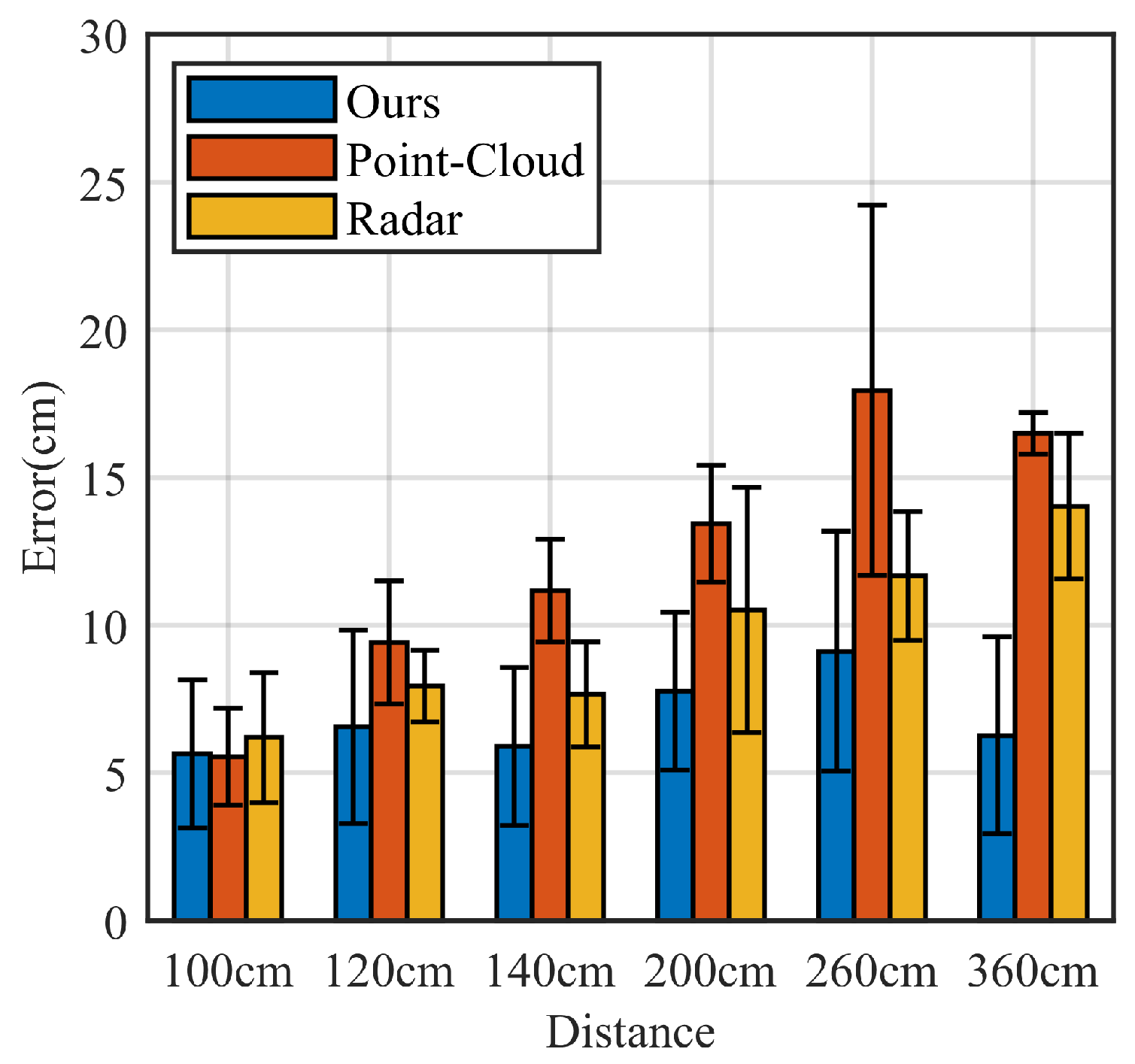
4.3. Comparison Experiment
5. Discussion
- Because of the multipath effect, the model is more environment-dependent. The occlusion on the radar signal propagation path may affect the positioning accuracy when many objects are in a complex indoor environment.
- Although the MAL model can provide accurate information about the target’s position in 3D space, it cannot track it in real time.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| MAL | Multipath-Assisted Localization |
| BDS | BeiDou Navigation Satellite System |
| GPS | Global Positioning System |
| GSM | Global System for Mobile Communications |
| SISO | Single-Input Single-Output |
References
- Zagami, J.; Parl, S.; Bussgang, J.; Melillo, K. Providing universal location services using a wireless E911 location network. IEEE Commun. Mag. 1998, 36, 66–71. [Google Scholar] [CrossRef] [Green Version]
- Marco, A.; Casas, R.; Falco, J.; Gracia, H.; Artigas, J.; Roy, A. Location-based services for elderly and disabled people. Comput. Commun. 2008, 31, 1055–1066. [Google Scholar] [CrossRef]
- Lugrin, J.L.; Kern, F.; Schmidt, R.; Kleinbeck, C.; Roth, D.; Daxer, C.; Feigl, T.; Mutschler, C.; Latoschik, M.E. A location-based VR museum. In Proceedings of the 2018 10th International Conference on Virtual Worlds and Games for Serious Applications (VS-Games), Würzburg, Germany, 5–7 September 2018. [Google Scholar]
- Seinfeld, S.; Feuchtner, T.; Pinzek, J.; Muller, J. Impact of Information Placement and User Representations in VR on Performance and Embodiment. IEEE Trans. Vis. Comput. Graph. 2020, 28, 1545–1556. [Google Scholar] [CrossRef] [PubMed]
- Kunisada, Y.; Premachandra, C. High Precision Location Estimation in Mountainous Areas Using GPS. Sensors 2022, 22, 1149. [Google Scholar] [CrossRef] [PubMed]
- Varshavsky, A.; De Lara, E.; Hightower, J.; LaMarca, A.; Otsason, V. GSM indoor localization. Pervasive Mob. Comput. 2007, 3, 698–720. [Google Scholar] [CrossRef] [Green Version]
- Faragher, R.; Harle, R. Location Fingerprinting With Bluetooth Low Energy Beacons. IEEE J. Sel. Areas Commun. 2015, 33, 2418–2428. [Google Scholar] [CrossRef]
- Rida, M.E.; Liu, F.; Jadi, Y.; Algawhari, A.A.A.; Askourih, A. Indoor location position based on bluetooth signal strength. In Proceedings of the 2015 2nd International Conference on Information Science and Control Engineering, Shanghai, China, 24–26 April 2015; pp. 769–773. [Google Scholar]
- Yoon, P.K.; Zihajehzadeh, S.; Kang, B.-S.; Park, E.J. Robust Biomechanical Model-Based 3-D Indoor Localization and Tracking Method Using UWB and IMU. IEEE Sens. J. 2016, 17, 1084–1096. [Google Scholar] [CrossRef]
- Yilmaz, A.; Javed, O.; Shah, M. Object tracking: A survey. ACM Comput. Surv. 2006, 38, 13. [Google Scholar] [CrossRef]
- Kalal, Z.; Mikolajczyk, K.; Matas, J. Tracking-learning-detection. IEEE Trans. Pattern Anal. Mach. Intell. 2011, 34, 1409–1422. [Google Scholar] [CrossRef] [Green Version]
- He, T.; Hirose, S. Observation-driven Bayesian Filtering for Global Location Estimation in the Field Area. J. Field Robot. 2013, 30, 489–518. [Google Scholar] [CrossRef]
- Guidi, F.; Guerra, A.; Dardari, D. Personal Mobile Radars with Millimeter-Wave Massive Arrays for Indoor Mapping. IEEE Trans. Mob. Comput. 2015, 15, 1471–1484. [Google Scholar] [CrossRef]
- Texas Intruments. TI Training & Videos: mmWave Radar Sensors. Available online: https://training.ti.com/search-catalog/field_language/EN/categories/mmwave-radar-sensors (accessed on 1 January 2022).
- Lien, J.; Gillian, N.; Karagozler, M.E.; Amihood, P.; Schwesig, C.; Olson, E.; Raja, H.; Poupyrev, I. Soli: Ubiquitous gesture sensing with millimeter wave radar. ACM Trans. Graph. 2016, 35, 142. [Google Scholar] [CrossRef] [Green Version]
- Guo, J.; Jin, M.; He, Y.; Wang, W.; Liu, Y. Dancing Waltz with Ghosts: Measuring Sub-mm-Level 2D Rotor Orbit with a Single mmWave Radar. In Proceedings of the 20th International Conference on Information Processing in Sensor Networks (co-located with CPS-IoT Week 2021), Nashville, TN, USA, 18–21 May 2021; pp. 77–92. [Google Scholar]
- Alvarez-Narciandi, G.; Lopez-Portugues, M.; Las-Heras, F.; Laviada, J. Freehand, Agile, and High-Resolution Imaging With Compact mm-Wave Radar. IEEE Access 2019, 7, 95516–95526. [Google Scholar] [CrossRef]
- Yanik, M.E.; Torlak, M. Near-Field MIMO-SAR Millimeter-Wave Imaging With Sparsely Sampled Aperture Data. IEEE Access 2019, 7, 31801–31819. [Google Scholar] [CrossRef]
- Zhang, T.; Zhang, X. A Full-Level Context Squeeze-and-Excitation ROI Extractor for SAR Ship Instance Segmentation. IEEE Geosci. Remote Sens. Lett. 2022, 19, 4506705. [Google Scholar] [CrossRef]
- Zhang, T.; Zhang, X. HTC+ for SAR Ship Instance Segmentation. Remote Sens. 2022, 14, 2395. [Google Scholar] [CrossRef]
- Zhang, T.; Zhang, X. High-Speed Ship Detection in SAR Images Based on a Grid Convolutional Neural Network. Remote Sens. 2019, 11, 1206. [Google Scholar] [CrossRef] [Green Version]
- Zhang, T.; Shi, J.; Wei, S. Depthwise Separable Convolution Neural Network for High-Speed SAR Ship Detection. Remote Sens. 2019, 11, 2483. [Google Scholar] [CrossRef] [Green Version]
- Zhang, T.; Zhang, X. A polarization fusion network with geometric feature embedding for SAR ship classification. Pattern Recognit. 2021, 123, 108365. [Google Scholar] [CrossRef]
- Zhang, T.; Zhang, X. A Mask Attention Interaction and Scale Enhancement Network for SAR Ship Instance Segmentation. IEEE Geosci. Remote Sens. Lett. 2022, 19, 4511005. [Google Scholar] [CrossRef]
- Zhang, T.; Zhang, X.; Liu, C.; Shi, J.; Wei, S.; Ahmad, I.; Zhan, X.; Zhou, Y.; Pan, D.; Li, J.; et al. Balance learning for ship detection from synthetic aperture radar remote sensing imagery. ISPRS J. Photogramm. Remote Sens. 2021, 182, 190–207. [Google Scholar] [CrossRef]
- Mikhelson, I.V.; Bakhtiari, S.; Elmer, I.T.W.; Sahakian, A.V. Remote Sensing of Heart Rate and Patterns of Respiration on a Stationary Subject Using 94-GHz Millimeter-Wave Interferometry. IEEE Trans. Biomed. Eng. 2011, 58, 1671–1677. [Google Scholar] [CrossRef]
- Guo, J.; He, Y.; Jiang, C.; Jin, M.; Li, S.; Zhang, J.; Xi, R.; Liu, Y. Measuring Micrometer-Level Vibrations with mmWave Radar. IEEE Trans. Mob. Comput. 2021. [CrossRef]
- Belgiovane, D.; Chen, C.C. Micro-Doppler characteristics of pedestrians and bicycles for automotive radar sensors at 77 GHz. In Proceedings of the 2017 11th European Conference on Antennas and Propagation (EUCAP), Paris, France, 19–24 March 2017. [Google Scholar]
- Vandersmissen, B.; Knudde, N.; Jalalvand, A.; Couckuyt, I.; Bourdoux, A.; De Neve, W.; Dhaene, T. Indoor Person Identification Using a Low-Power FMCW Radar. IEEE Trans. Geosci. Remote Sens. 2018, 56, 3941–3952. [Google Scholar] [CrossRef] [Green Version]
- Kim, Y.; Moon, T. Human Detection and Activity Classification Based on Micro-Doppler Signatures Using Deep Convolutional Neural Networks. IEEE Geosci. Remote Sens. Lett. 2015, 13, 8–12. [Google Scholar] [CrossRef]
- Saho, K.; Shioiri, K.; Fujimoto, M.; Kobayashi, Y. Micro-Doppler Radar Gait Measurement to Detect Age- and Fall Risk-Related Differences in Gait: A Simulation Study on Comparison of Deep Learning and Gait Parameter-Based Approaches. IEEE Access 2021, 9, 18518–18526. [Google Scholar] [CrossRef]
- Etinger, A.; Balal, N.; Litvak, B.; Einat, M.; Kapilevich, B.; Pinhasi, Y. Non-Imaging MM-Wave FMCW Sensor for Pedestrian Detection. IEEE Sens. J. 2013, 14, 1232–1237. [Google Scholar] [CrossRef]
- Zhao, M.; Tian, Y.; Zhao, H.; Alsheikh, M.A.; Li, T.; Hristov, R.; Kabelac, Z.; Katabi, D.; Torralba, A. RF-based 3D skeletons. In Proceedings of the 2018 Conference of the ACM Special Interest Group on Data Communication, Budapest Hungary, 20–25 August 2018; pp. 267–281. [Google Scholar]
- Pegoraro, J.; Solimini, D.; Matteo, F.; Bashirov, E.; Meneghello, F.; Rossi, M. Deep Learning for Accurate Indoor Human Tracking with a mm-Wave Radar. In Proceedings of the 2020 IEEE Radar Conference (RadarConf20), Florence, Italy, 21–25 September 2020; pp. 1–6. [Google Scholar]
- Adib, F.; Kabelac, Z.; Katabi, D.; Miller, R.C. 3d tracking via body radio reflections. In Proceedings of the 11th USENIX Symposium on Networked Systems Design and Implementation (NSDI. 14), Seattle, WA, USA, 2–4 April 2014; pp. 317–329. [Google Scholar]
- Leigsnering, M.; Ahmad, F.; Amin, M.G.; Zoubir, A.M. Compressive Sensing-Based Multipath Exploitation for Stationary and Moving Indoor Target Localization. IEEE J. Sel. Top. Signal Process. 2015, 9, 1469–1483. [Google Scholar] [CrossRef]
- Setlur, P.; Amin, M.; Ahmad, F. Multipath Model and Exploitation in Through-the-Wall and Urban Radar Sensing. IEEE Trans. Geosci. Remote Sens. 2011, 49, 4021–4034. [Google Scholar] [CrossRef]
- Zhang, G.; Geng, X.; Lin, Y.-J. Comprehensive mPoint: A Method for 3D Point Cloud Generation of Human Bodies Utilizing FMCW MIMO mm-Wave Radar. Sensors 2021, 21, 6455. [Google Scholar] [CrossRef]
- Dixit, A.; Sathyamurthy, J.; Rao, S.; Gurugopinath, S.; Thiagarajan, G. Detection and Localization of Targets Using Millimeter Wave Radars: An Experimental Study. In Proceedings of the 2021 IEEE International Conference on Electronics, Computing and Communication Technologies (CONECCT), Bangalore, India, 9–11 July 2021. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| IWR 1642 BOOST | |
|---|---|
| Parameters | Values |
| Carrier Frequency | 77 GHz |
| Number of Transmitting Antennas | 1 |
| Number of Receiving Antennas | 4 |
| Bandwidth | 3997.56 MHz |
| Single Chrip Signal Duration | 60 |
| Sampling Rate | 5000 ksps |
| Number of Chirps per Frame | 128 |
| Number of Frames | 150 |
| Number of Samples per Chirp | 256 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hao, Z.; Yan, H.; Dang, X.; Ma, Z.; Jin, P.; Ke, W. Millimeter-Wave Radar Localization Using Indoor Multipath Effect. Sensors 2022, 22, 5671. https://doi.org/10.3390/s22155671
Hao Z, Yan H, Dang X, Ma Z, Jin P, Ke W. Millimeter-Wave Radar Localization Using Indoor Multipath Effect. Sensors. 2022; 22(15):5671. https://doi.org/10.3390/s22155671
Chicago/Turabian StyleHao, Zhanjun, Hao Yan, Xiaochao Dang, Zhongyu Ma, Peng Jin, and Wenze Ke. 2022. "Millimeter-Wave Radar Localization Using Indoor Multipath Effect" Sensors 22, no. 15: 5671. https://doi.org/10.3390/s22155671
APA StyleHao, Z., Yan, H., Dang, X., Ma, Z., Jin, P., & Ke, W. (2022). Millimeter-Wave Radar Localization Using Indoor Multipath Effect. Sensors, 22(15), 5671. https://doi.org/10.3390/s22155671