
Selective Microwave Zeroth-Order Resonator Sensor Aided by Machine Learning




Abstract
:1. Introduction
2. Sensor Design and Analysis
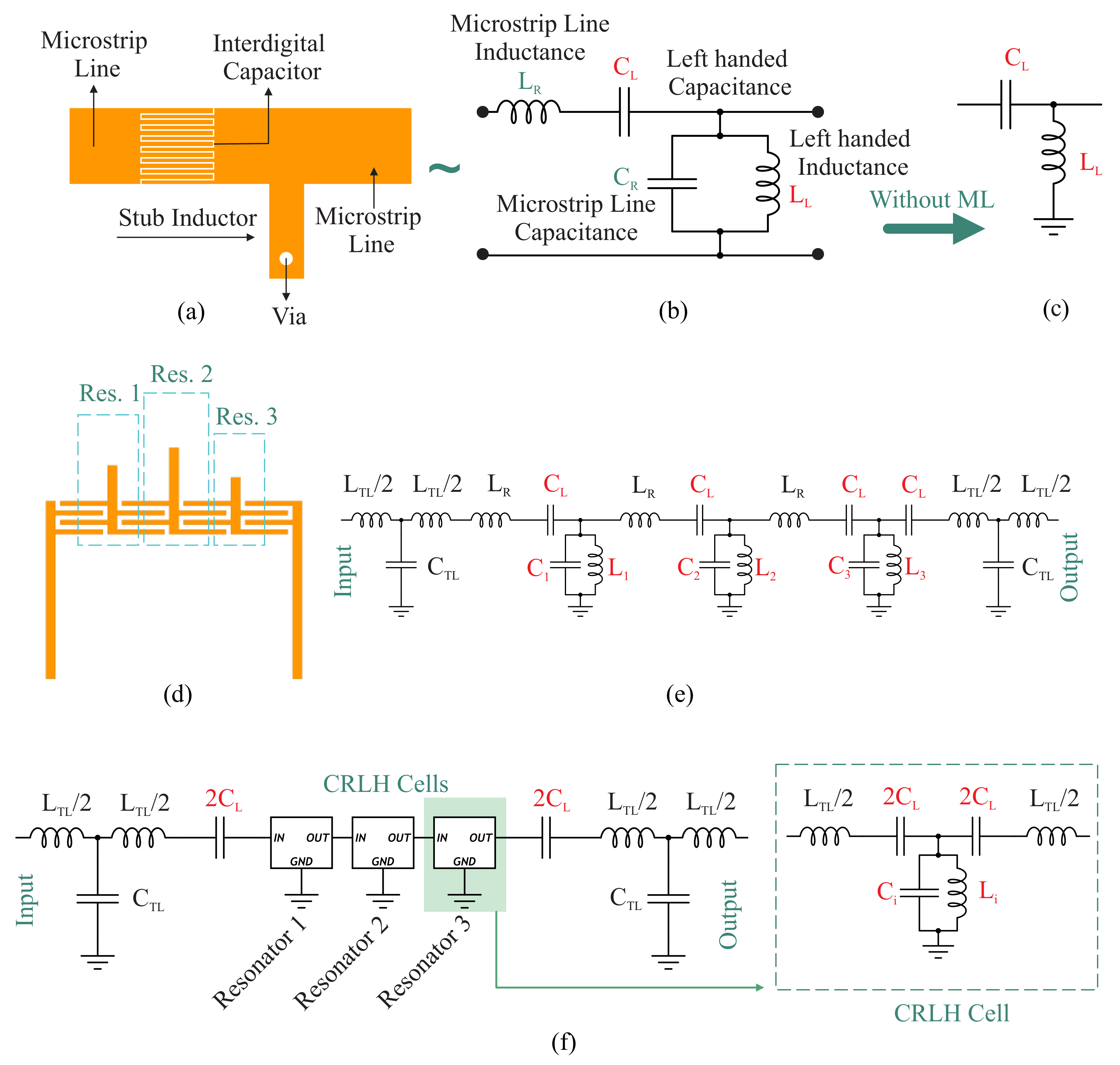
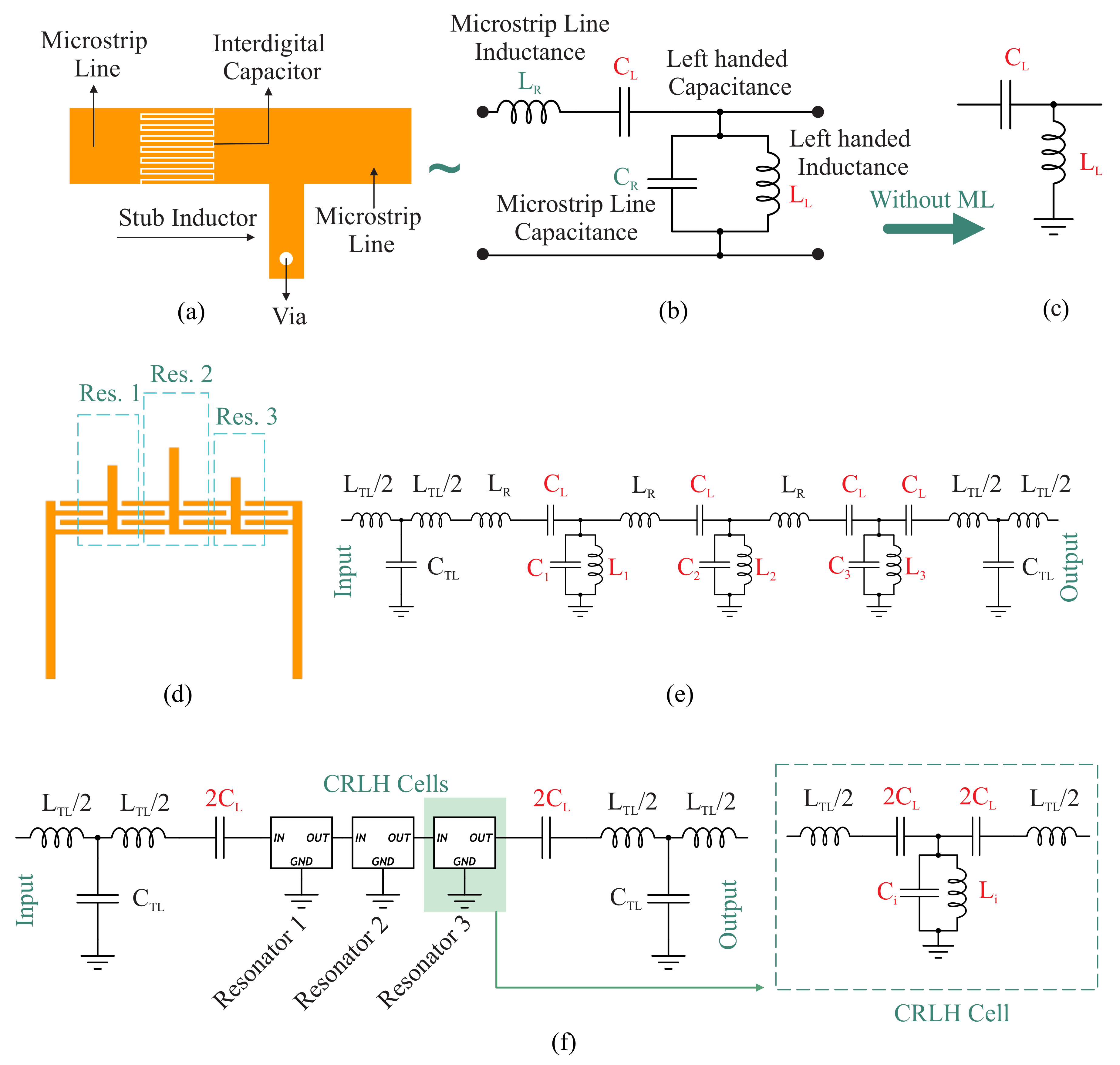
2.1. CRLH Analysis
2.1.1. Input/Output Transmission Line
2.1.2. Connecting Capacitances
2.1.3. CRLH Model
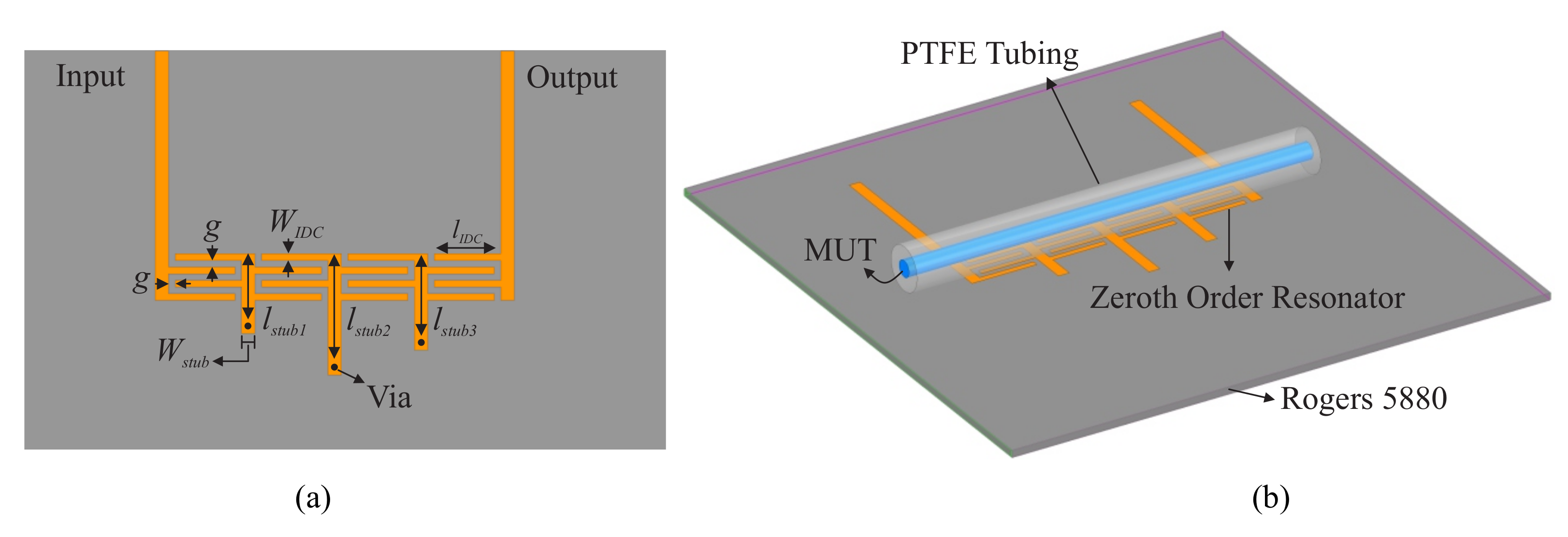
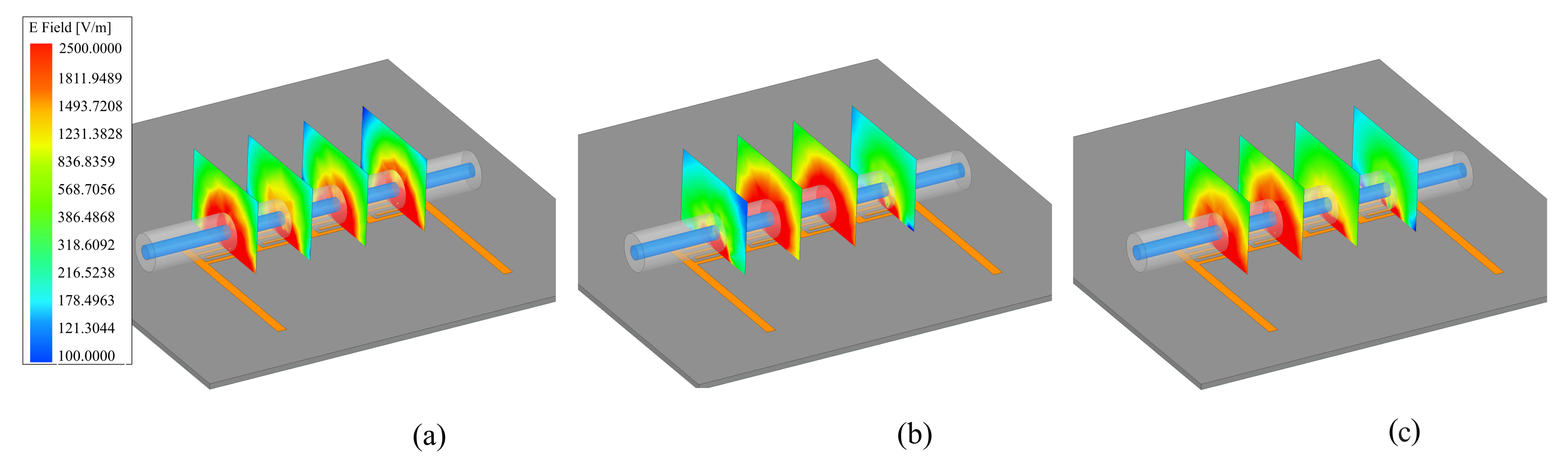
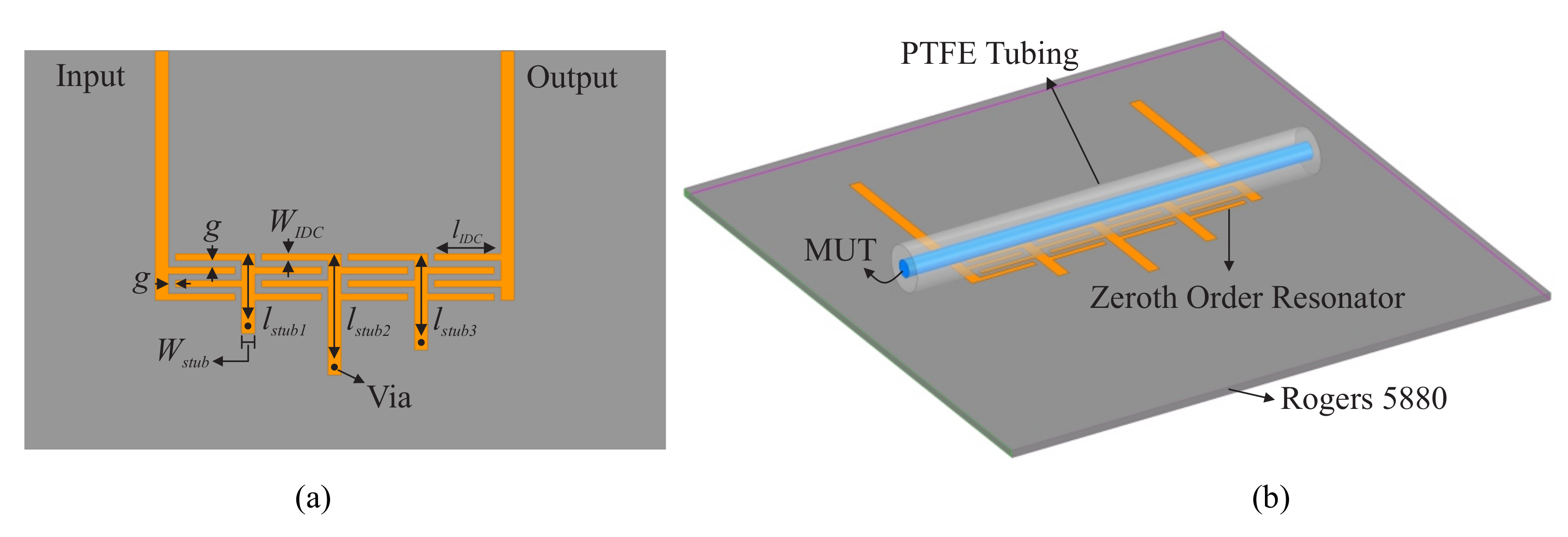
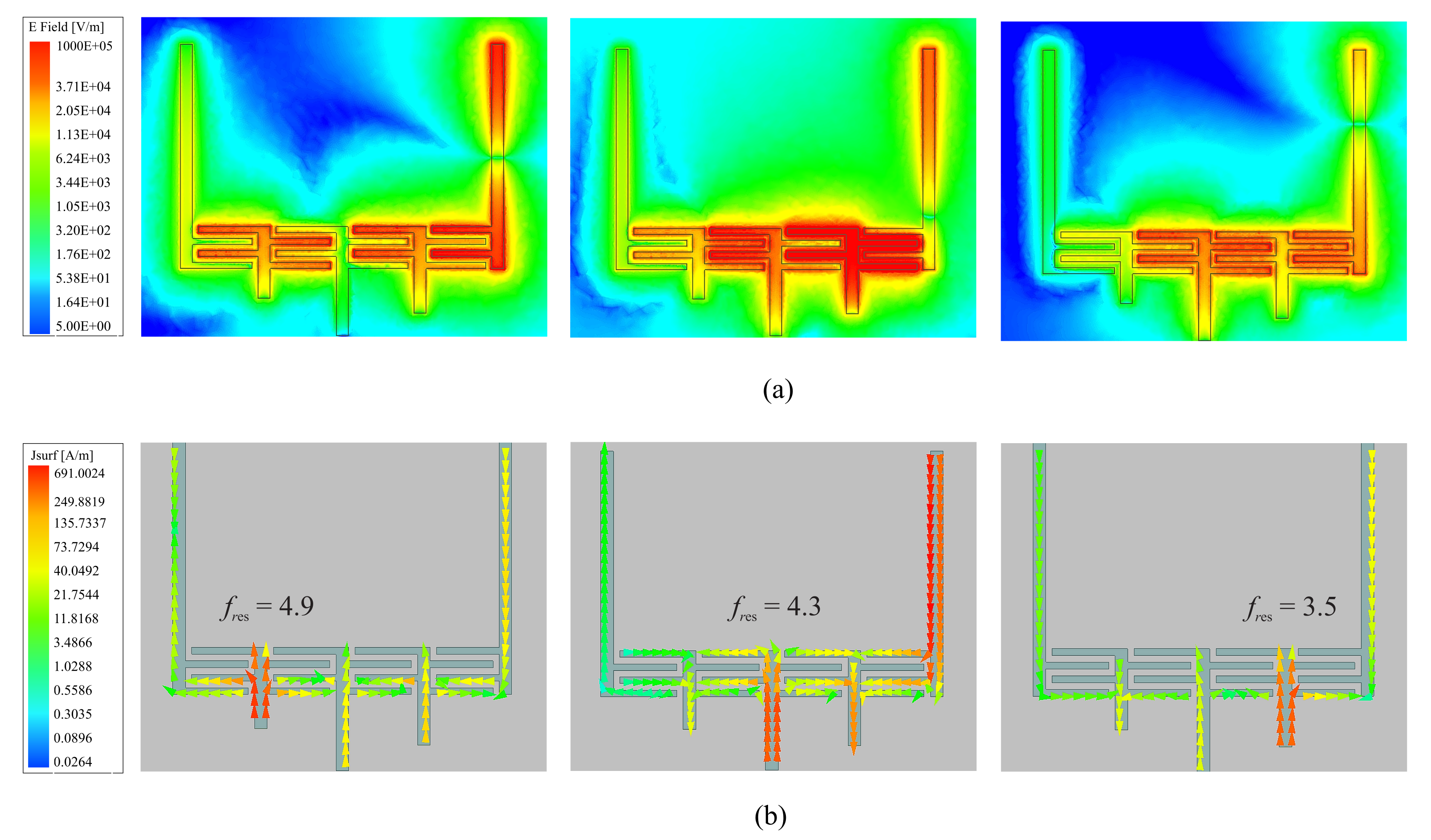
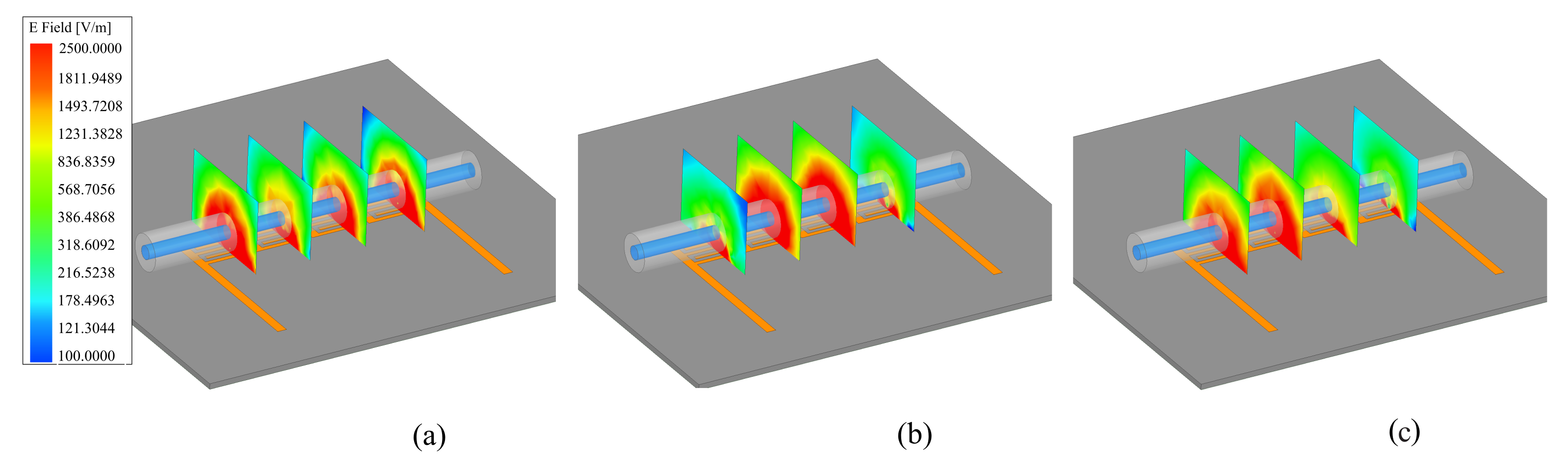
2.2. Sensor Topology and Field Analysis
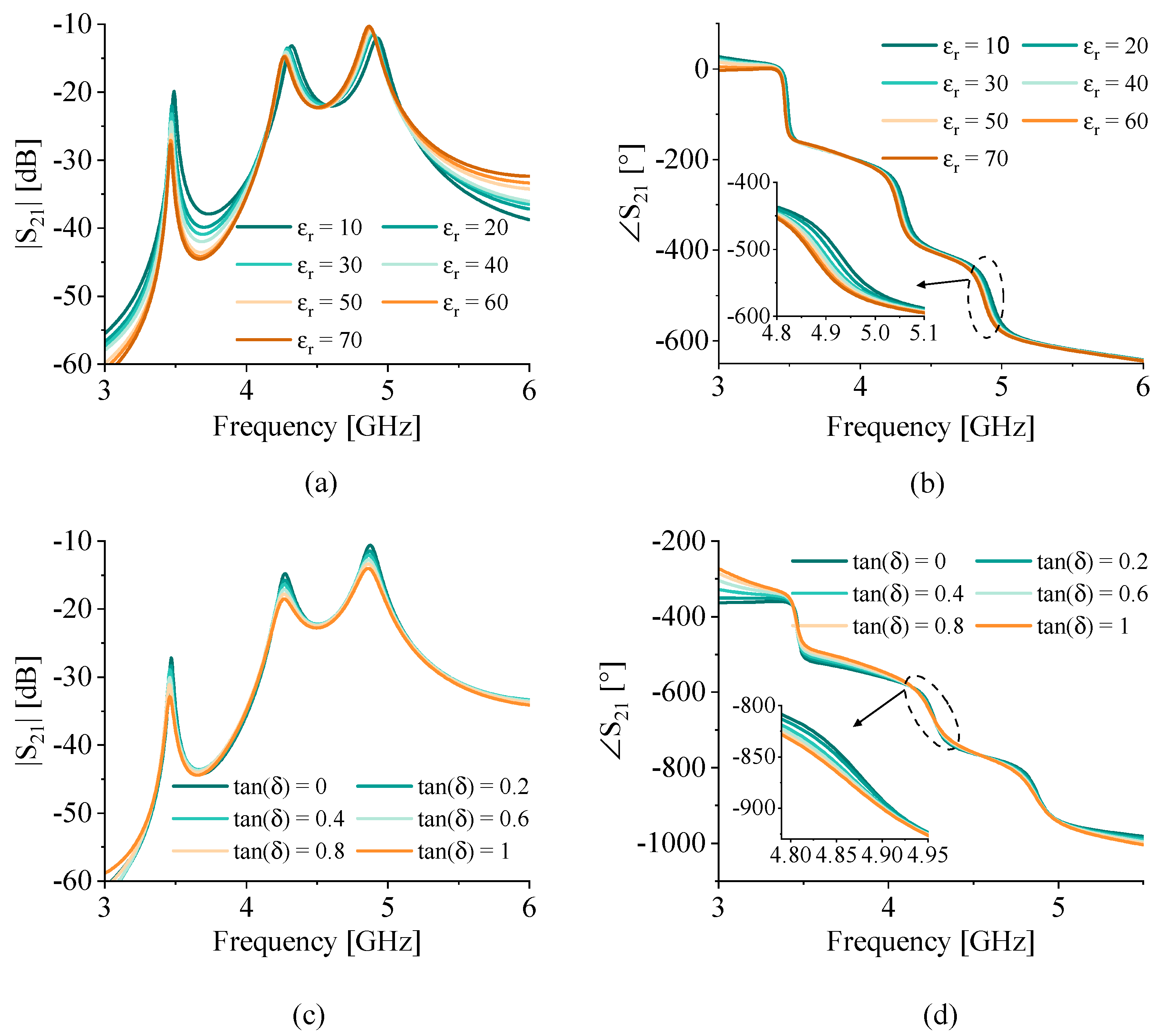
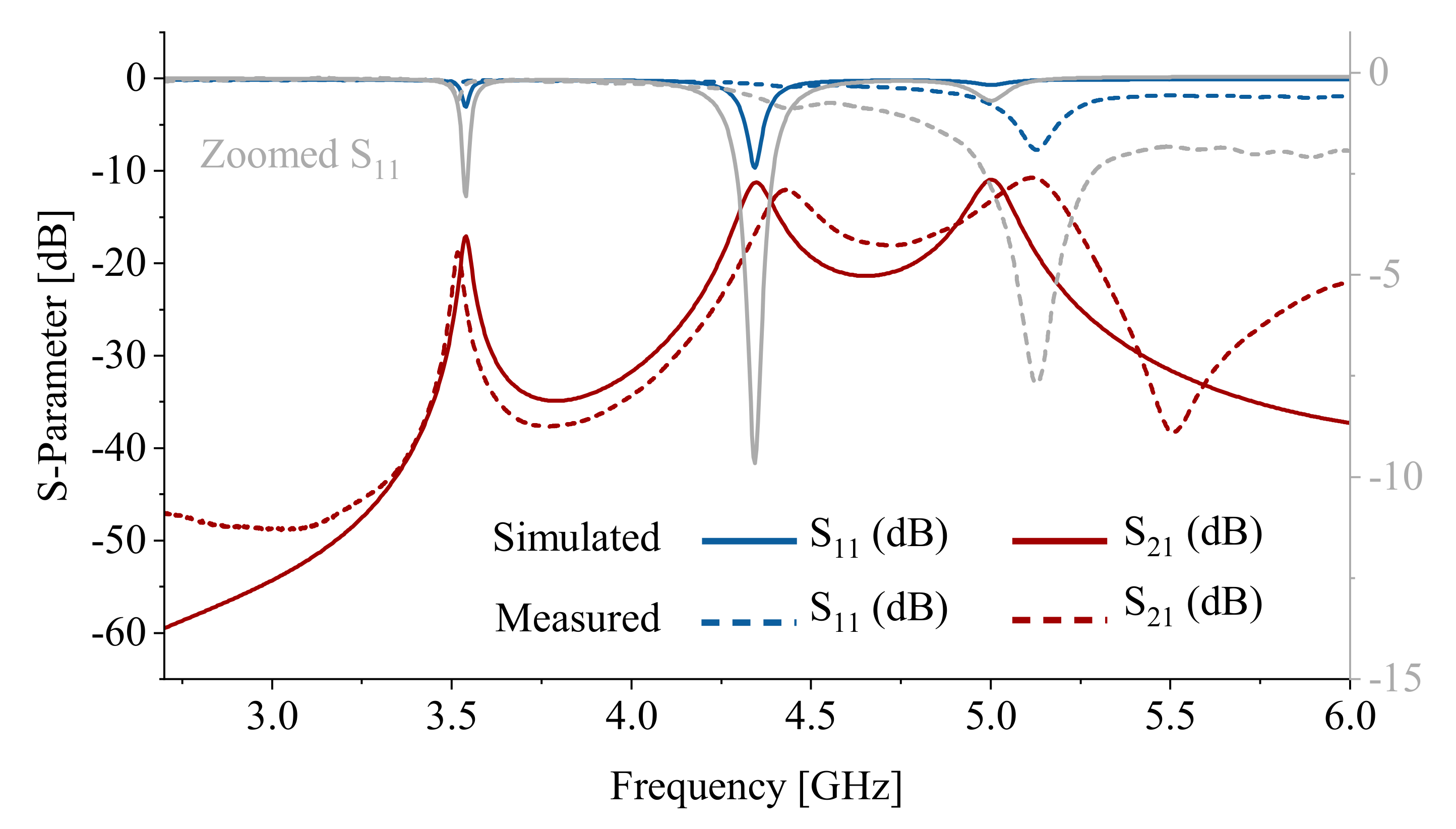
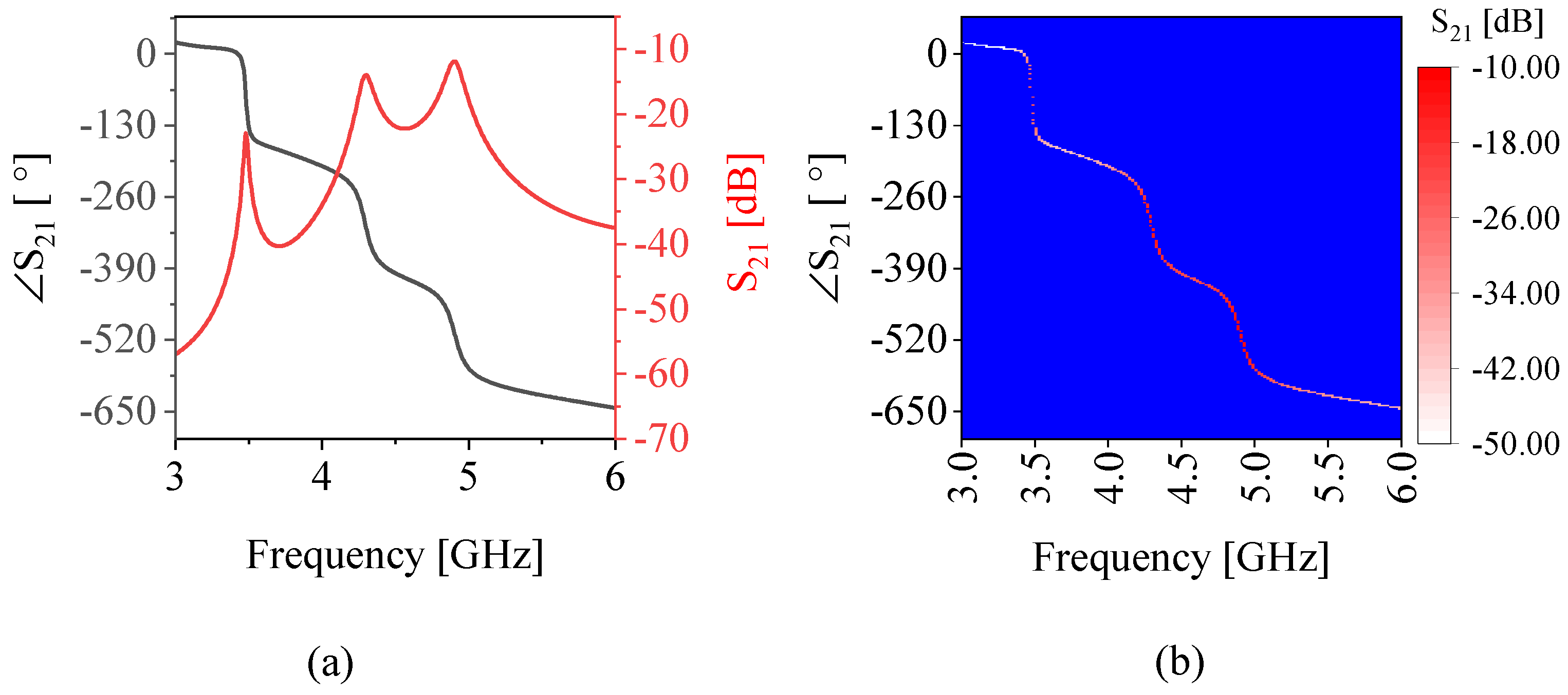
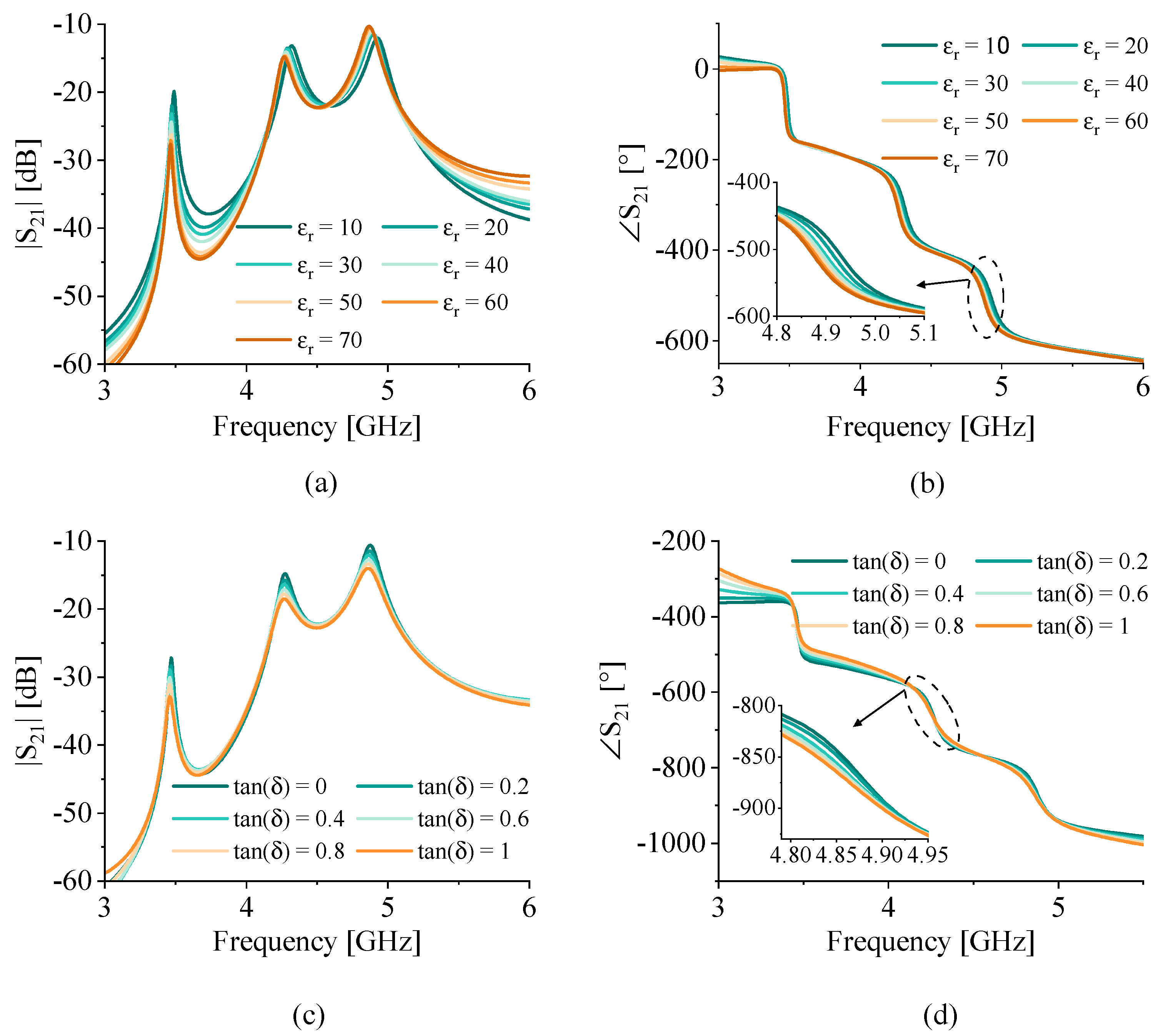
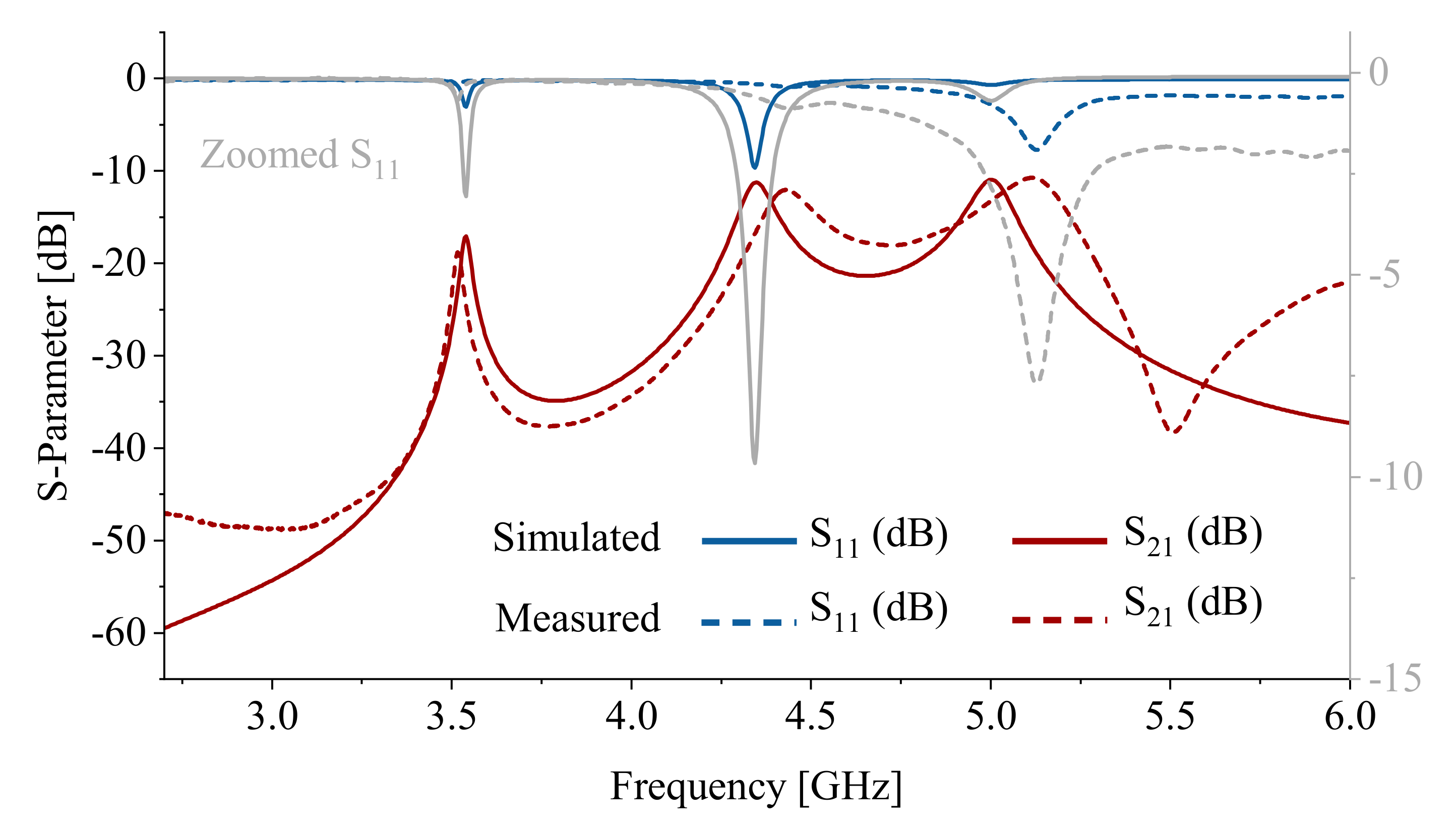
2.3. Sensor Response in Simulation
3. Measurement Results and Discussion
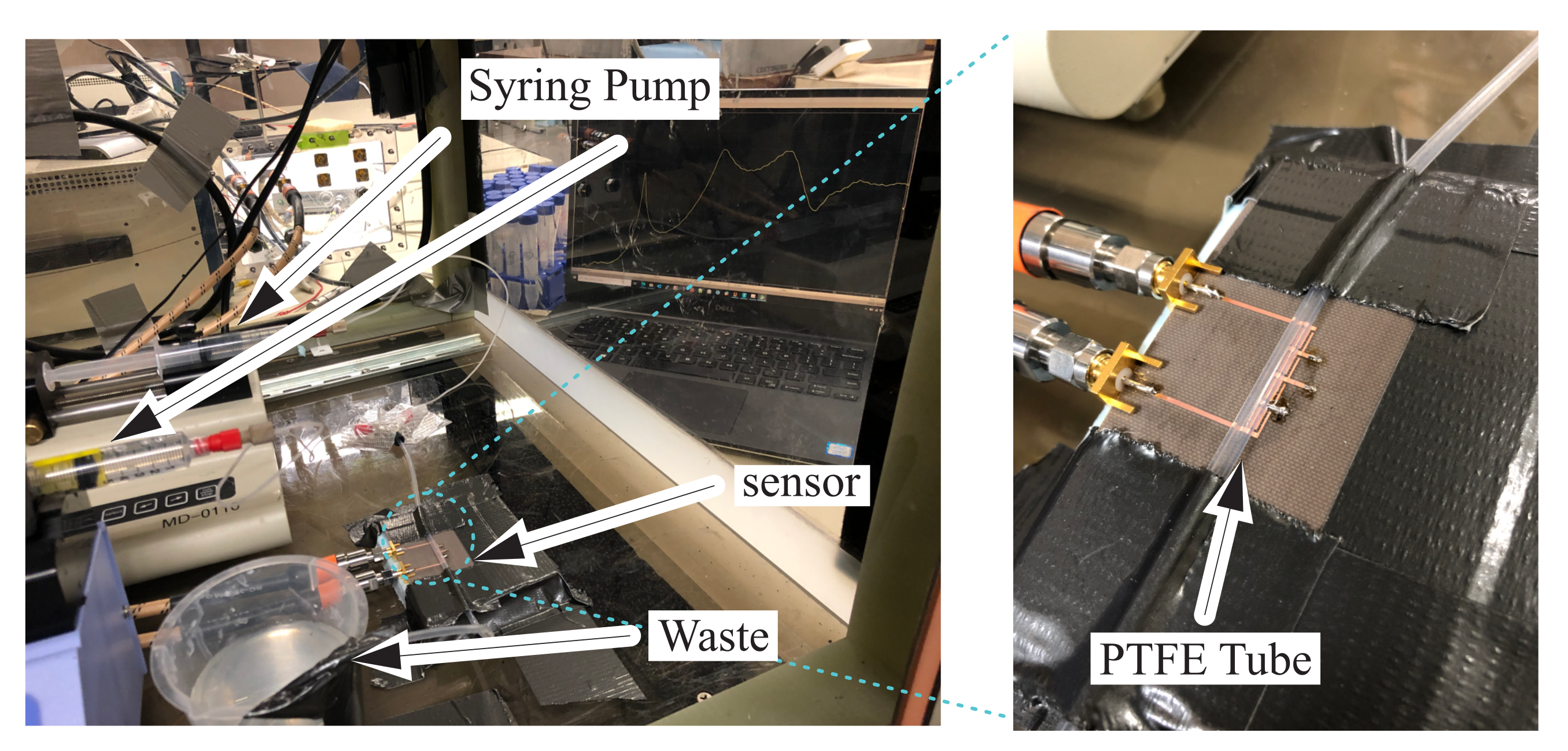
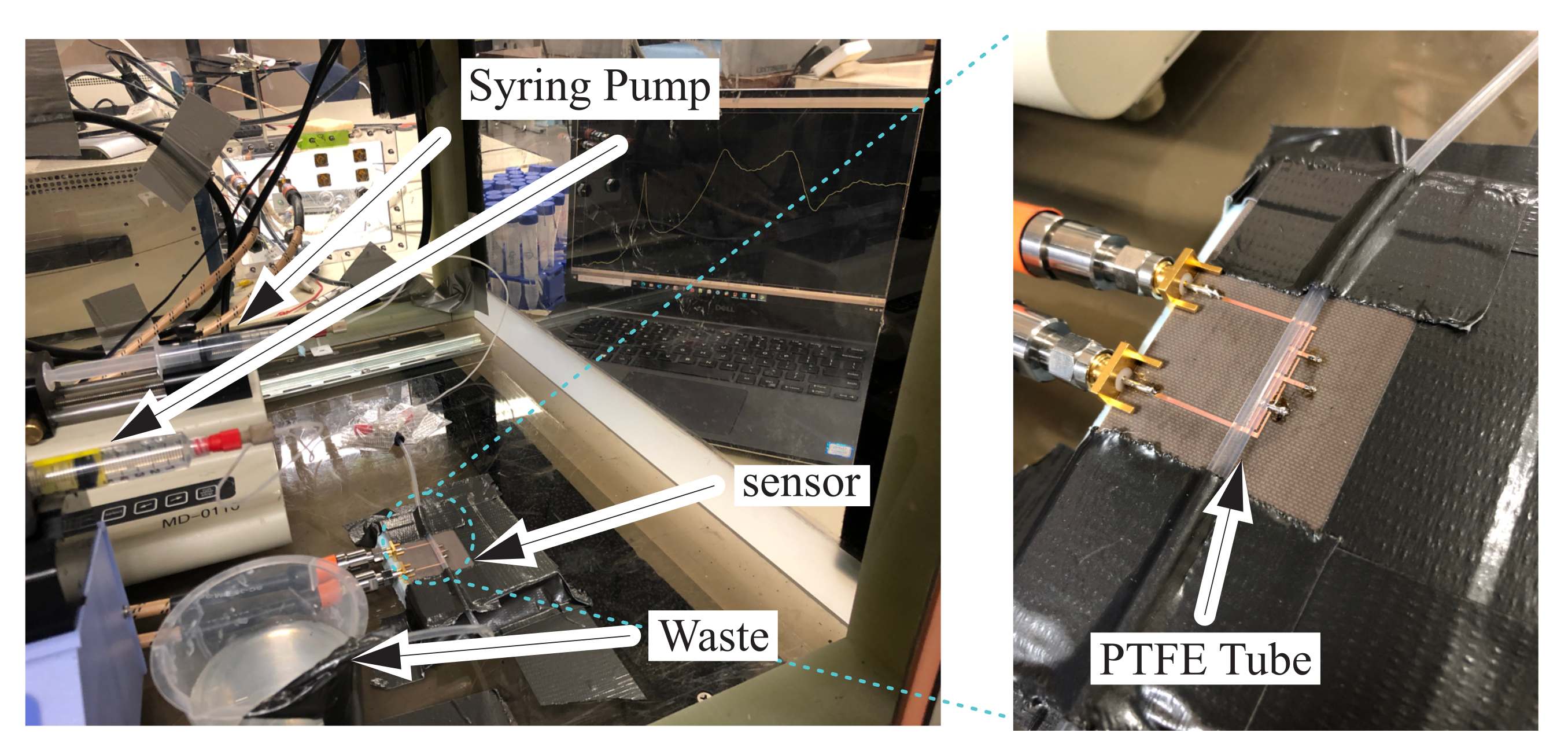
3.1. Measurement Setup
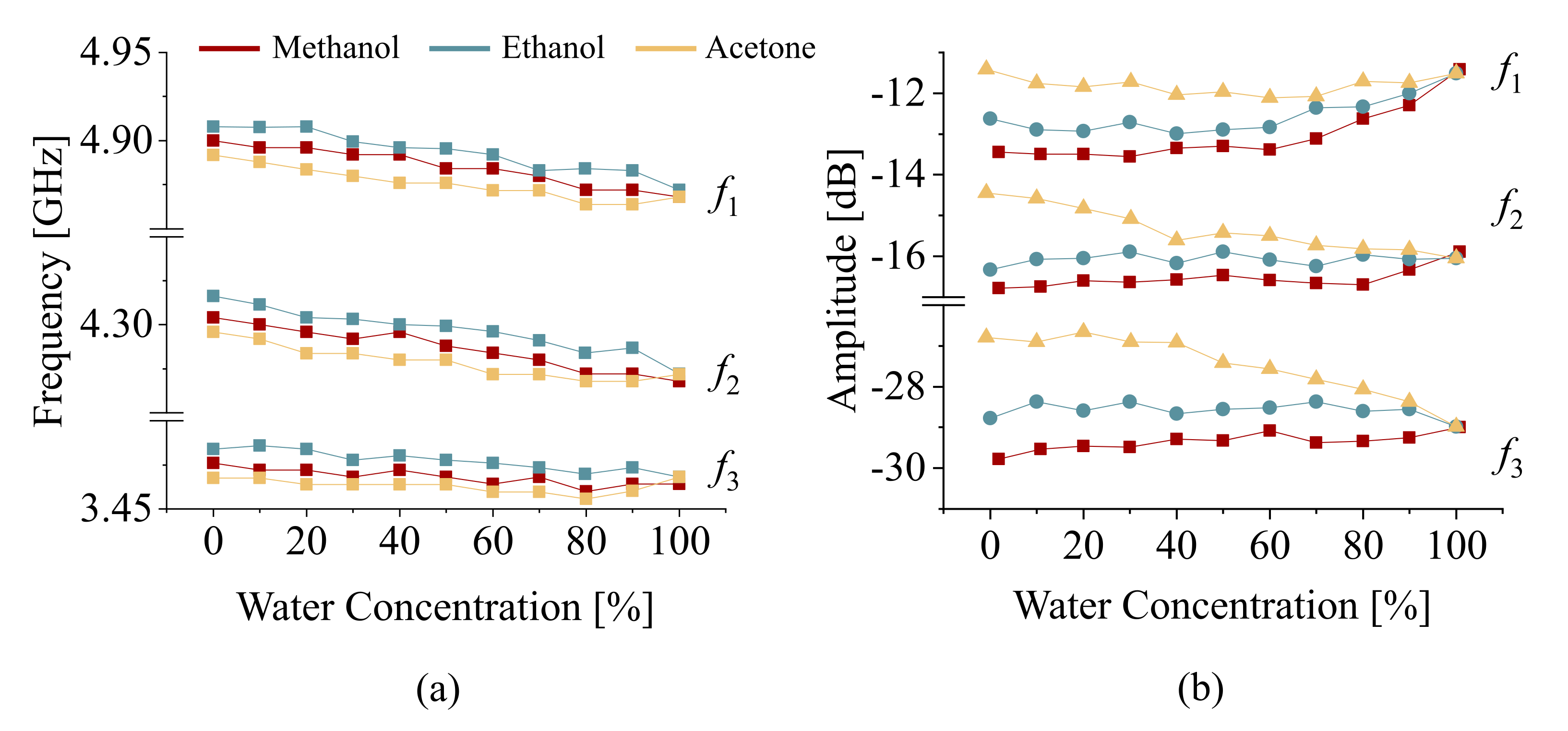
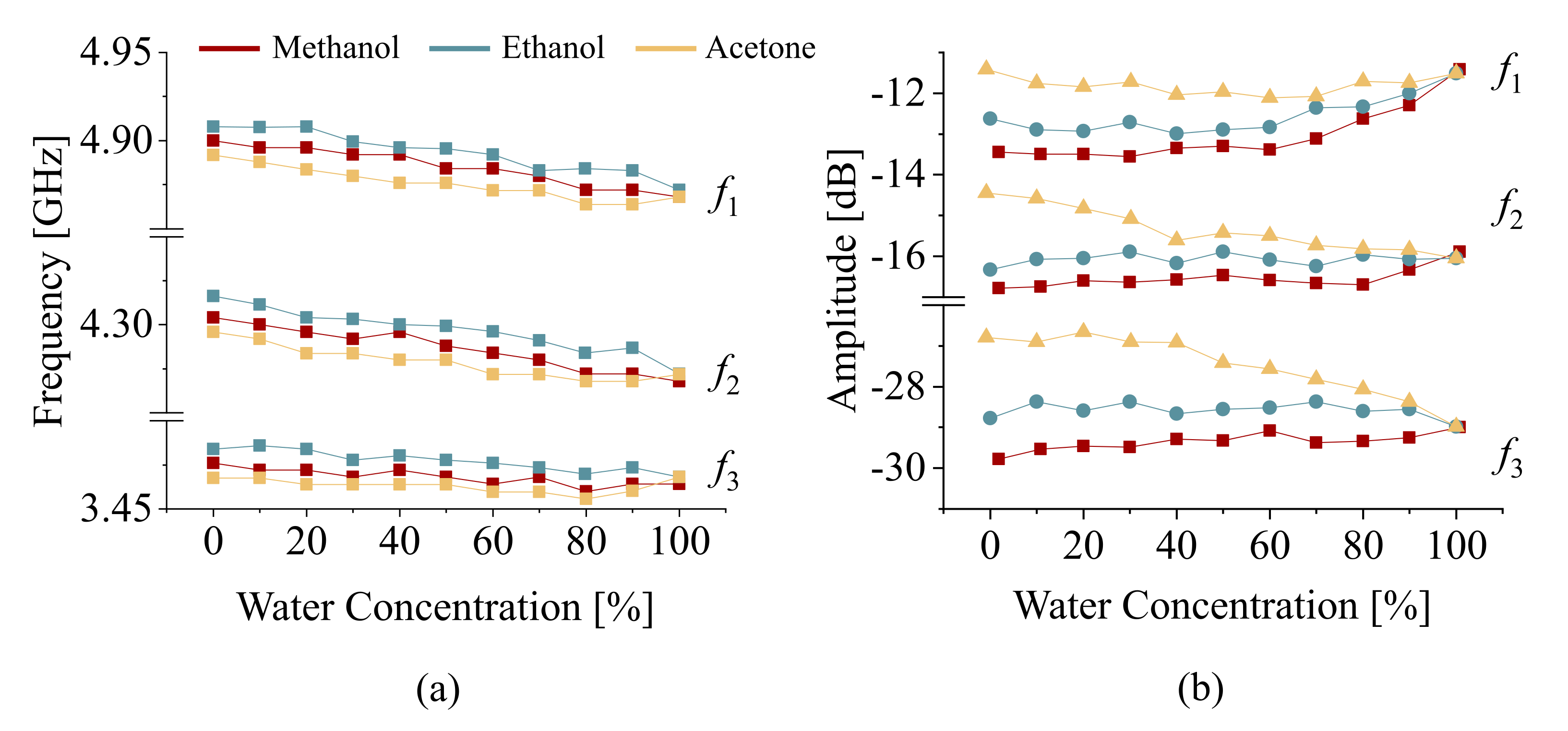
3.2. Results and Discussion
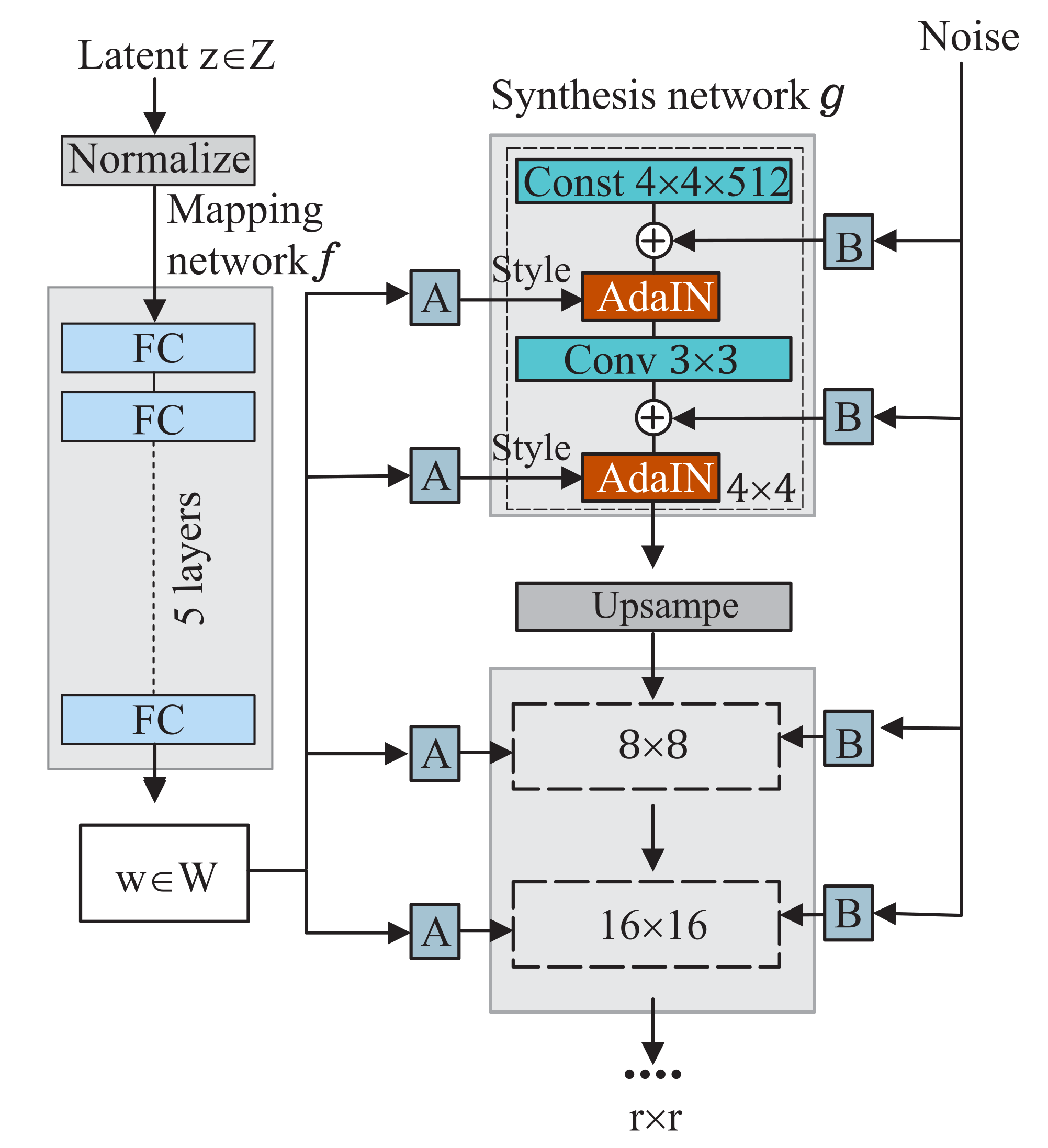
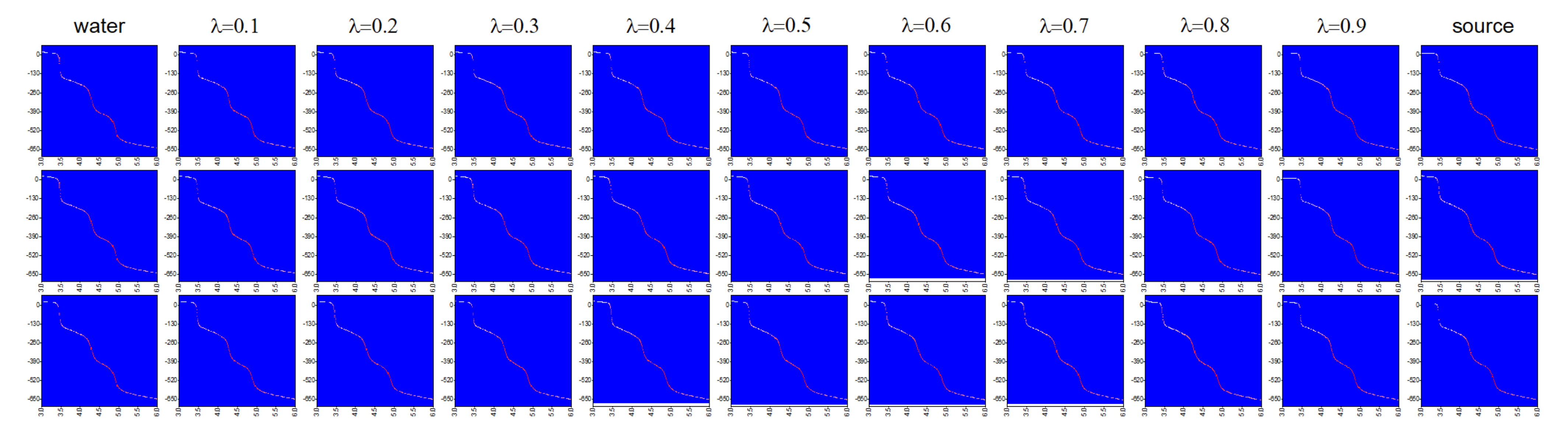
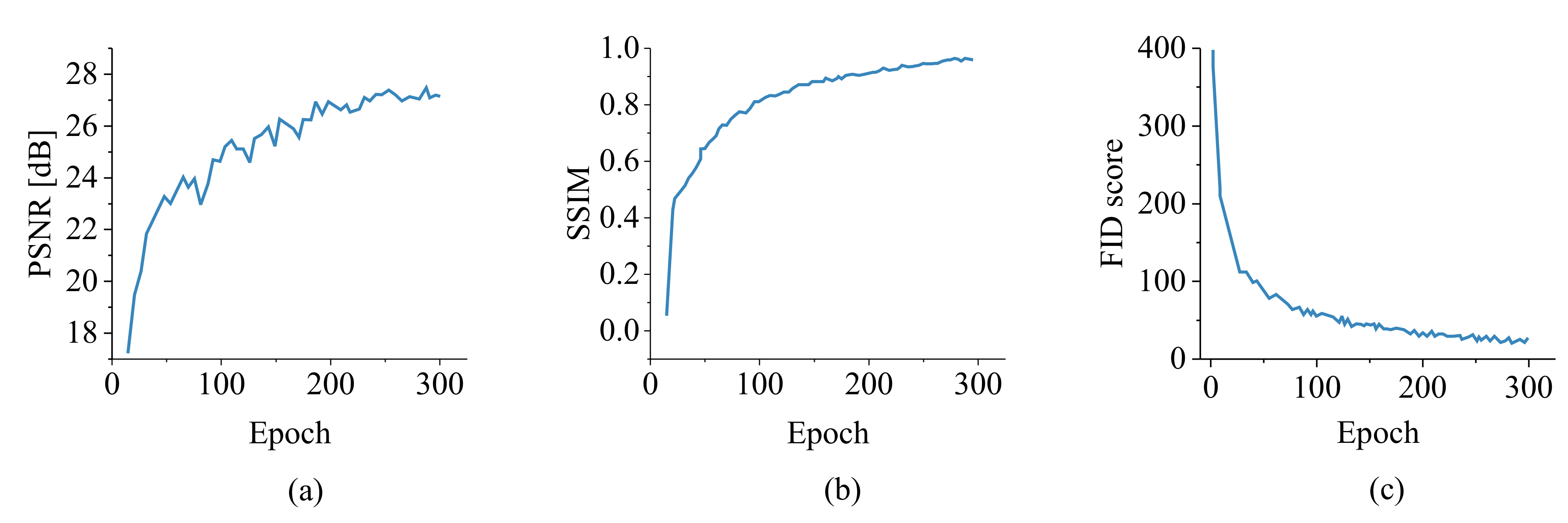
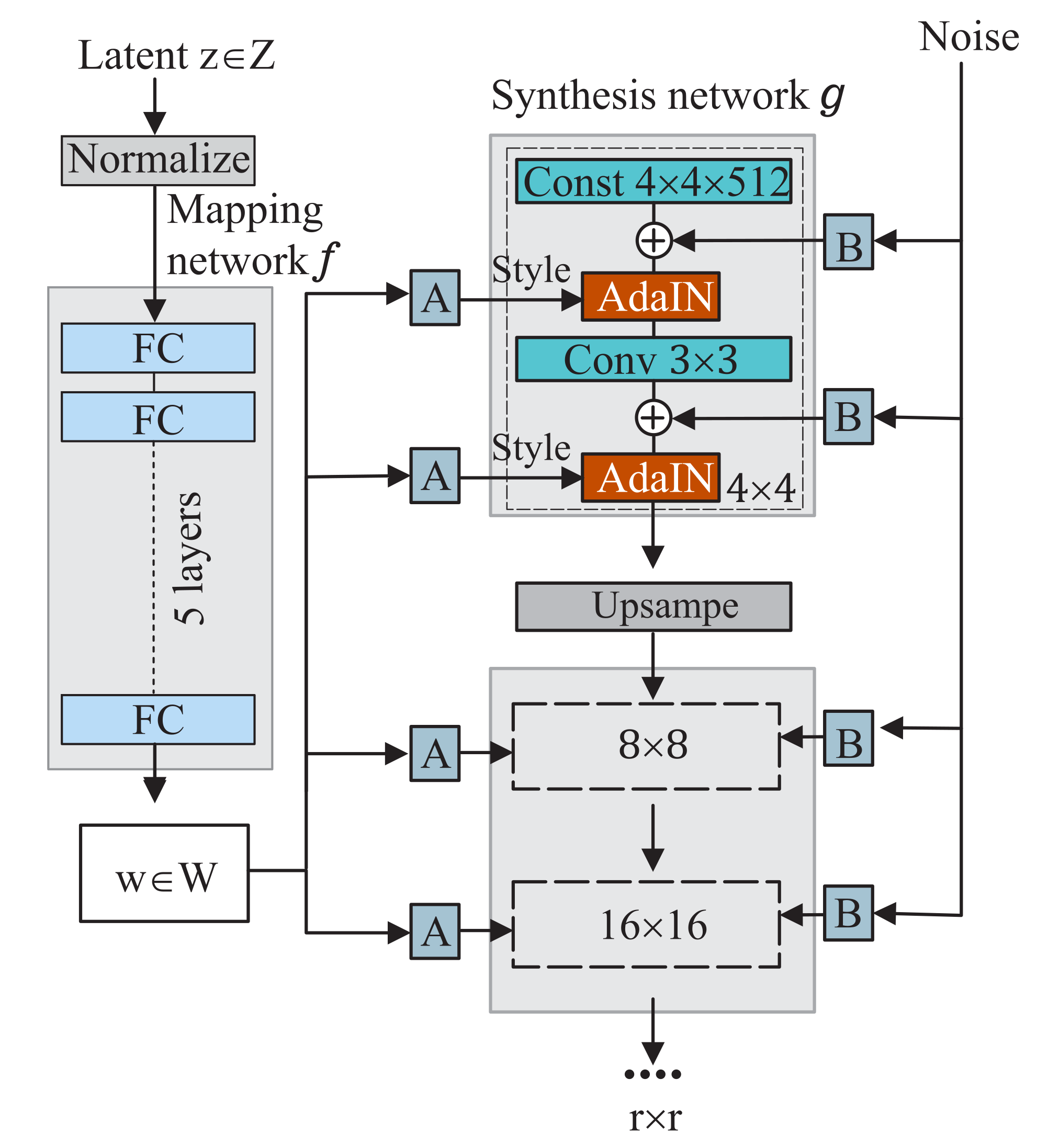
3.3. Style-GAN
 in Figure 11, converts vector w into the style mean and the style variance . An adaptive instance normalization uses the statistical information of and to pass the properties of the adapted style to the next one as follows:
in Figure 11, converts vector w into the style mean and the style variance . An adaptive instance normalization uses the statistical information of and to pass the properties of the adapted style to the next one as follows: in Figure 11, fits the shape of the noise into the propagating tensor and sums them. A final RGB convolution is applied to the output, which transforms the tensor into a desired image of sensor response.
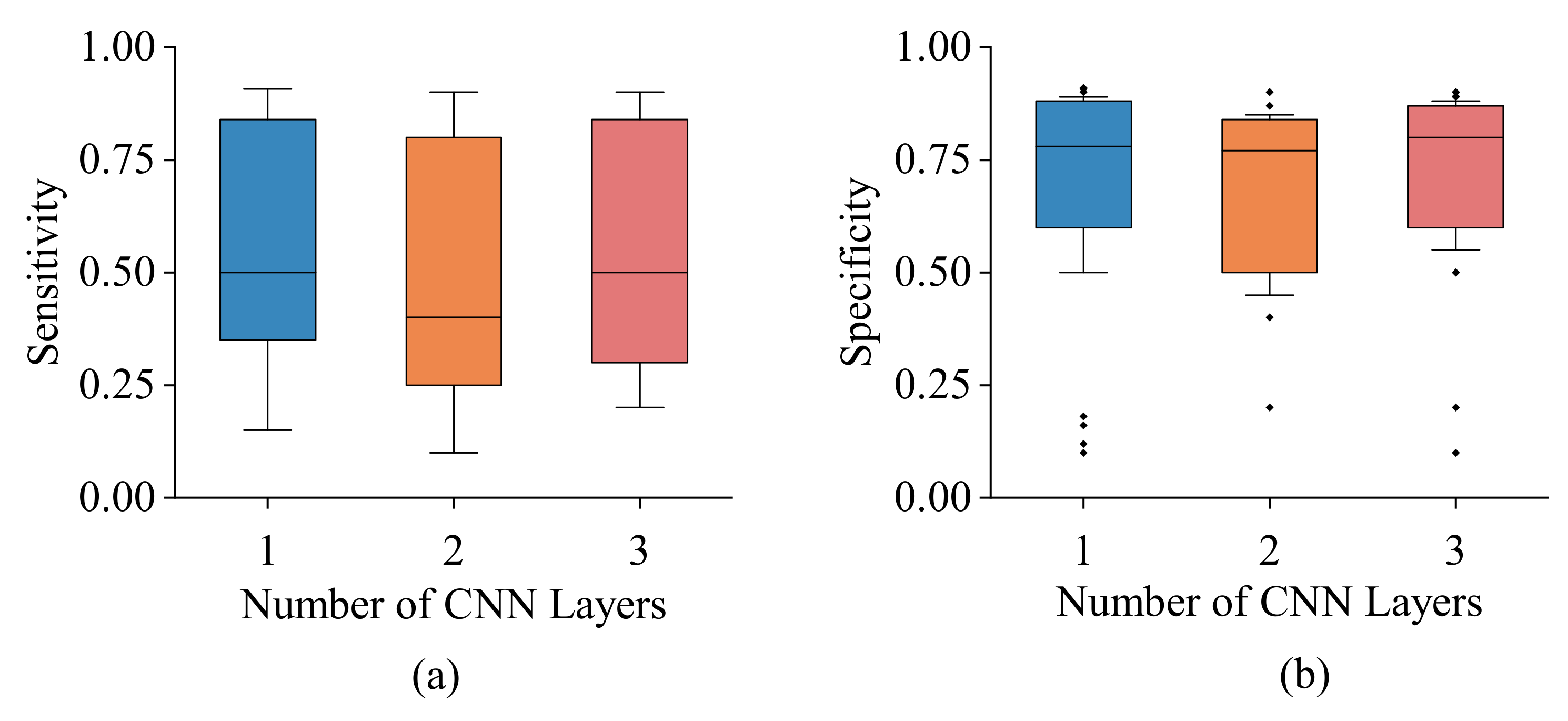
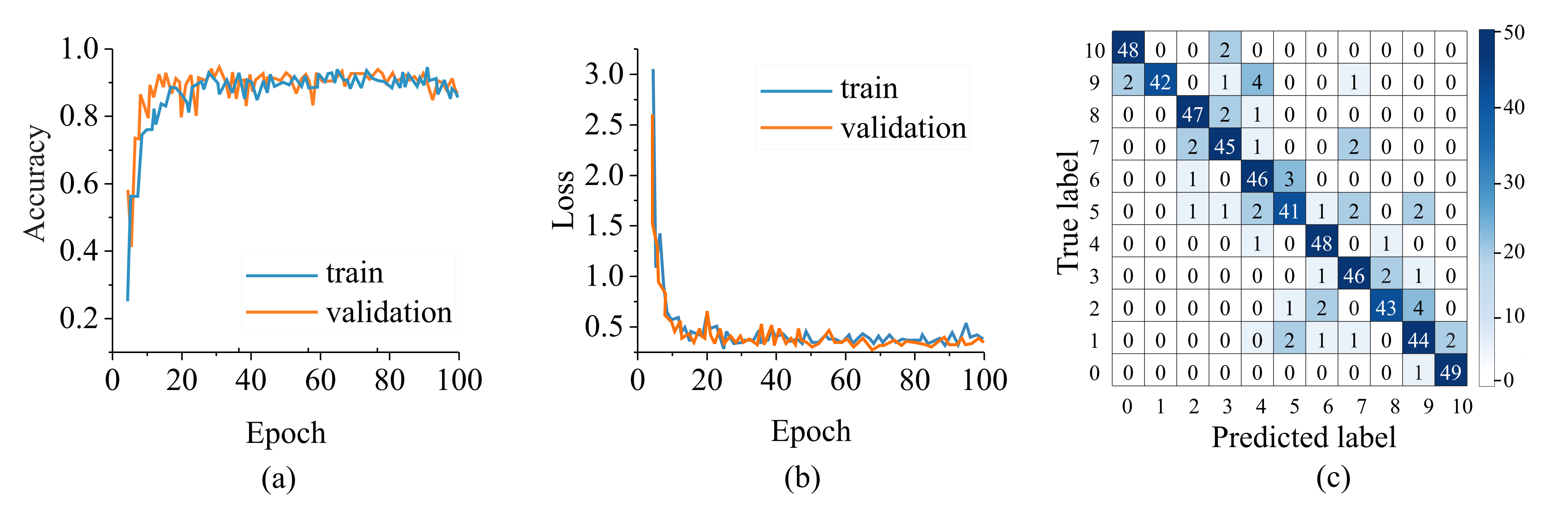
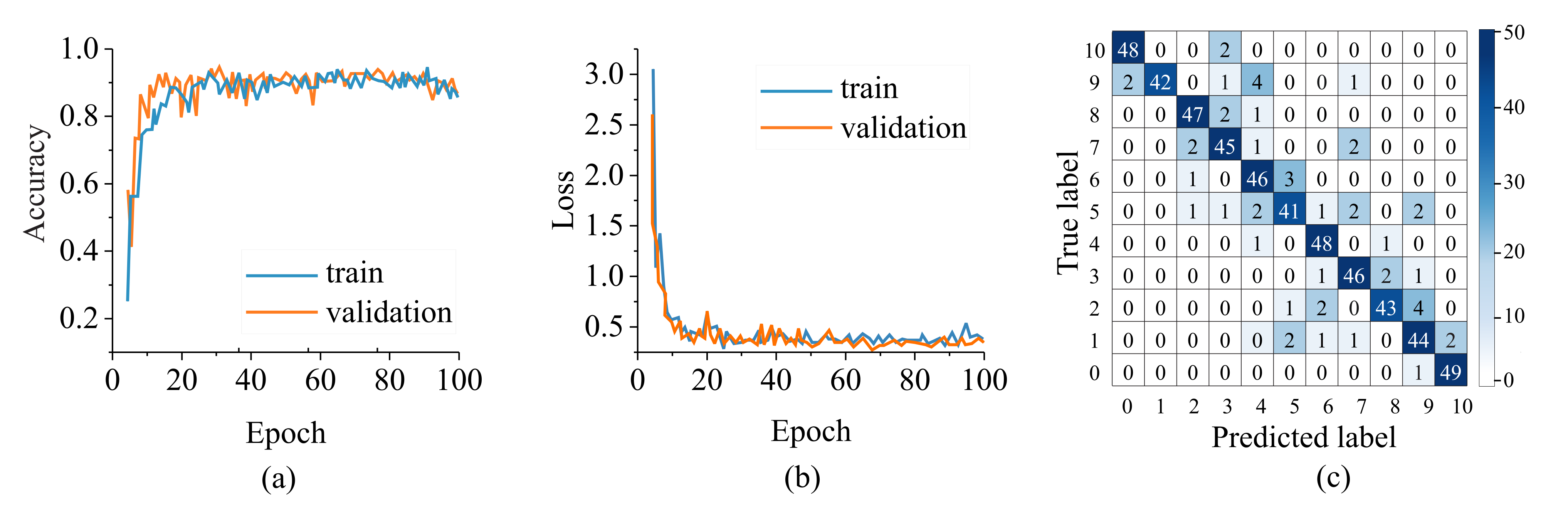
in Figure 11, fits the shape of the noise into the propagating tensor and sums them. A final RGB convolution is applied to the output, which transforms the tensor into a desired image of sensor response.3.4. Classification Using CNN
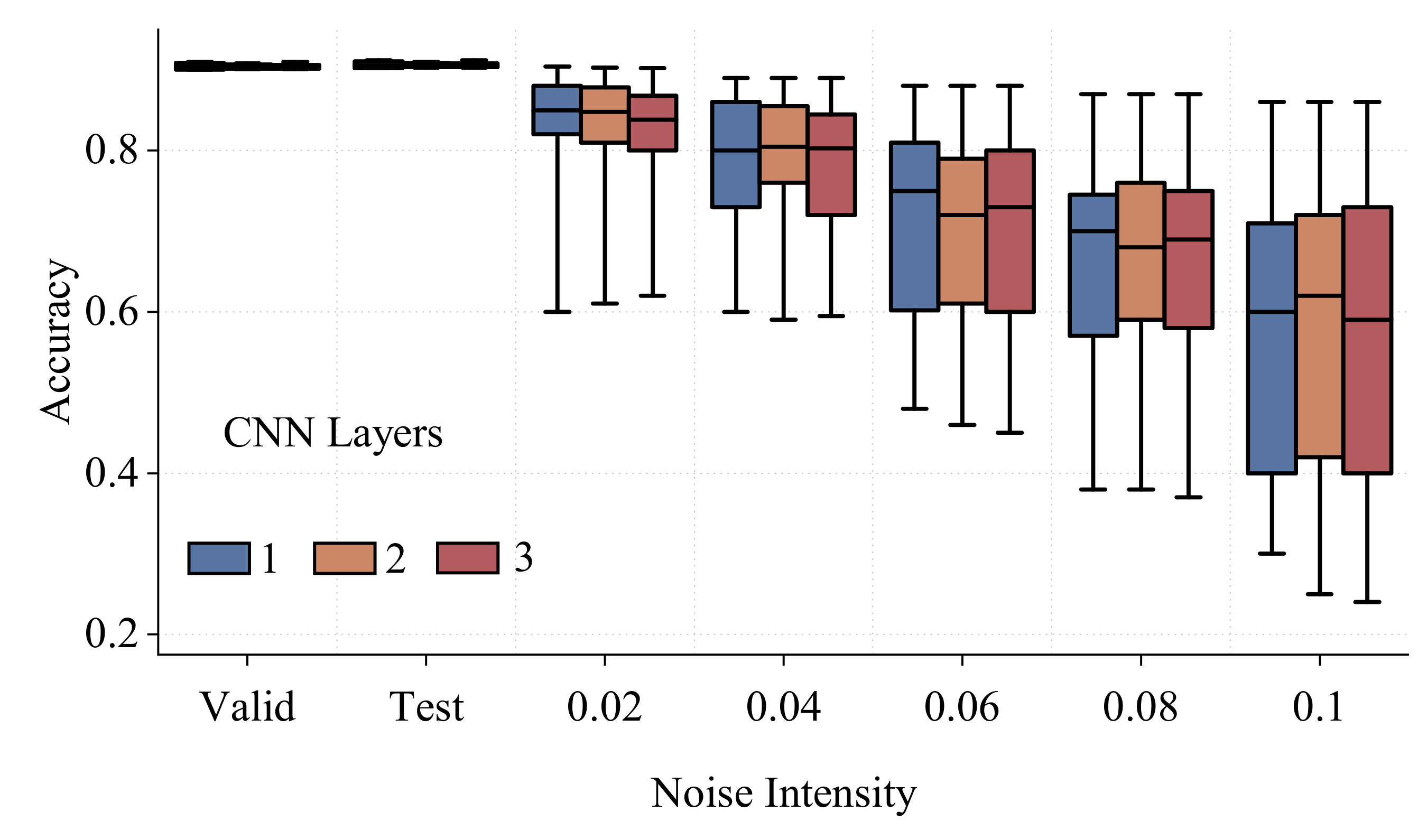
3.5. Model Uncertainty
3.6. Comparative Analysis
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Abdolrazzaghi, M.; Daneshmand, M. Exploiting sensitivity enhancement in micro-wave planar sensors using intermodulation products with phase noise analysis. IEEE Trans. Circuits Syst. I Reg. Papers 2020, 67, 4382–4395. [Google Scholar] [CrossRef]
- Kazemi, N.; Schofield, K.; Musilek, P. A high-resolution reflective microwave planar sensor for sensing of vanadium electrolyte. Sensors 2021, 21, 3759. [Google Scholar] [CrossRef] [PubMed]
- Abdolrazzaghi, M.; Zarifi, M.H.; Floquet, C.F.; Daneshmand, M. Contactless asphaltene detection using an active planar microwave resonator sensor. Energy Fuels 2017, 31, 8784–8791. [Google Scholar] [CrossRef]
- Baghelani, M. A Single-Wire Microwave Sensor for Selective Water and Clay in Bitumen Analysis at High Temperatures. IEEE Trans. Instrum. Meas. 2021, 70, 1–8. [Google Scholar] [CrossRef]
- Abbasi, Z.; Niazi, H.; Abdolrazzaghi, M.; Chen, W.; Daneshmand, M. Monitoring pH level using high-resolution microwave sensor for mitigation of stress corrosion cracking in steel pipelines. IEEE Sens. J. 2020, 20, 7033–7043. [Google Scholar] [CrossRef]
- Baghelani, M.; Abbasi, Z.; Daneshmand, M.; Light, P.E. Non-invasive continuous-time glucose monitoring system using a chipless printable sensor based on split ring microwave resonators. Sci. Rep. 2020, 10, 12980. [Google Scholar]
- Abdolrazzaghi, M.; Katchinskiy, N.; Elezzabi, A.Y.; Light, P.E.; Daneshmand, M. Noninvasive glucose sensing in aqueous solutions using an active split-ring resonator. IEEE Sens. J. 2021, 21, 18742–18755. [Google Scholar] [CrossRef]
- Li, Z.; Tian, X.; Qiu, C.W.; Ho, J.S. Metasurfaces for bioelectronics and healthcare. Nat. Electron. 2021, 4, 382–391. [Google Scholar] [CrossRef]
- Muñoz-Enano, J.; Coromina, J.; Vélez, P.; Su, L.; Gil, M.; Casacuberta, P.; Martín, F. Planar phase-variation microwave sensors for material characterization: A review and comparison of various approaches. Sensors 2021, 21, 1542. [Google Scholar] [CrossRef]
- Martín, F.; Vélez, P.; Gil, M. Microwave sensors based on resonant elements. Sensors 2020, 20, 3375. [Google Scholar] [CrossRef]
- Markel, V.A. Introduction to the Maxwell Garnett approximation: Tutorial. J. Opt. Soc. Am. A 2016, 33, 1244–1256. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Abdolrazzaghi, M.; Khan, S.; Daneshmand, M. A dual-mode split-ring resonator to eliminate relative humidity impact. IEEE Microw. Wirel. Compon. Lett. 2018, 28, 939–941. [Google Scholar] [CrossRef]
- Kazemi, N.; Abdolrazzaghi, M.; Musilek, P.; Daneshmand, M. A temperature-compensated high-resolution microwave sensor using artificial neural network. IEEE Microw. Wirel. Compon. Lett. 2020, 30, 919–922. [Google Scholar] [CrossRef]
- Chaparro-Ortiz, D.A.; Sejas-García, S.C.; Torres-Torres, R. Relative Permittivity and Loss Tangent Determination Combining Broadband S-parameter and Single-Frequency Resonator Measurements. IEEE Trans. Electromagn. Compat. 2022, 1–7. [Google Scholar] [CrossRef]
- Abdolrazzaghi, M.; Daneshmand, M.; Iyer, A.K. Strongly enhanced sensitivity in planar microwave sensors based on metamaterial coupling. IEEE Trans. Microw. Theory Tech. 2018, 66, 1843–1855. [Google Scholar] [CrossRef] [Green Version]
- Abdolrazzaghi, M.; Kazemi, N.; Daneshmand, M. Sensitive spectroscopy using DSRR array and Linvill negative impedance. In Proceedings of the 2019 IEEE/MTT-S International Microwave Symposium (IMS), Boston, MA, USA, 2–7 June 2019; pp. 1080–1083. [Google Scholar]
- Abdolrazzaghi, M.; Kazemi, N.; Daneshmand, M. An SIW oscillator for microfluidic lossy medium characterization. In Proceedings of the 2020 IEEE/MTT-S International Microwave Symposium (IMS), Los Angeles, CA, USA, 4–6 August 2020; pp. 221–224. [Google Scholar]
- Farooq, A.; Anwar, S.; Awais, M.; Rehman, S. A deep CNN based multi-class classification of Alzheimer’s disease using MRI. In Proceedings of the 2017 IEEE International Conference on Imaging Systems and Techniques (IST), Beijing, China, 18–20 October 2017; pp. 1–6. [Google Scholar]
- Badža, M.M.; Barjaktarović, M.Č. Classification of brain tumors from MRI images using a convolutional neural network. Appl. Sci. 2020, 10, 1999. [Google Scholar] [CrossRef] [Green Version]
- Le, N.Q.K.; Nguyen, B.P. Prediction of FMN binding sites in electron transport chains based on 2-D CNN and PSSM Profiles. IEEE/ACM Trans. Comput. Biol. Bioinform. 2019, 18, 2189–2197. [Google Scholar] [CrossRef]
- Le, N.Q.K.; Ho, Q.T. Deep transformers and convolutional neural network in identifying DNA N6-methyladenine sites in cross-species genomes. Methods 2022, 204, 199–206. [Google Scholar] [CrossRef]
- Li, W.; Wang, D.; Li, M.; Gao, Y.; Wu, J.; Yang, X. Field detection of tiny pests from sticky trap images using deep learning in agricultural greenhouse. Comput. Electron. Agric. 2021, 183, 106048. [Google Scholar] [CrossRef]
- Barbedo, J.G. Factors influencing the use of deep learning for plant disease recognition. Biosyst. Eng. 2018, 172, 84–91. [Google Scholar] [CrossRef]
- Raza, A.; Ayub, H.; Khan, J.A.; Ahmad, I.; Salama, A.S.; Daradkeh, Y.I.; Javeed, D.; Ur Rehman, A.; Hamam, H. A Hybrid Deep Learning-Based Approach for Brain Tumor Classification. Electronics 2022, 11, 1146. [Google Scholar] [CrossRef]
- Lu, C.Y.; Rustia, D.J.A.; Lin, T.T. Generative adversarial network based image augmentation for insect pest classification enhancement. IFAC-PapersOnLine 2019, 52, 1–5. [Google Scholar] [CrossRef]
- Ahmad, I.; Ullah, I.; Khan, W.U.; Ur Rehman, A.; Adrees, M.S.; Saleem, M.Q.; Cheikhrouhou, O.; Hamam, H.; Shafiq, M. Efficient algorithms for E-healthcare to solve multiobject fuse detection problem. J. Healthc. Eng. 2021, 2021, 9500304. [Google Scholar] [CrossRef]
- Goodfellow, I.; Pouget-Abadie, J.; Mirza, M.; Xu, B.; Warde-Farley, D.; Ozair, S.; Courville, A.; Bengio, Y. Generative adversarial nets. In Proceedings of the Advances in Neural Information Processing Systems, Montreal, QC, USA, 8–13 December 2014; Voume 27. [Google Scholar]
- Sabuhi, M.; Zhou, M.; Bezemer, C.P.; Musilek, P. Applications of Generative Adversarial Networks in Anomaly Detection: A Systematic Literature Review. IEEE Access 2021, 9, 161003–161029. [Google Scholar] [CrossRef]
- Brock, A.; Donahue, J.; Simonyan, K. Large scale GAN training for high fidelity natural image synthesis. arXiv 2018, arXiv:1809.11096. [Google Scholar]
- Donahue, C.; McAuley, J.; Puckette, M. Synthesizing audio with generative adversarial networks. arXiv 2018, arXiv:1802.04208. [Google Scholar]
- Kusner, M.J.; Hernández-Lobato, J.M. Gans for sequences of discrete elements with the gumbel-softmax distribution. arXiv 2016, arXiv:1611.04051. [Google Scholar]
- Simovski, C.R.; Belov, P.A.; He, S. Backward wave region and negative material parameters of a structure formed by lattices of wires and split-ring resonators. IEEE Trans. Antennas Propag. 2003, 51, 2582–2591. [Google Scholar] [CrossRef]
- Lai, A.; Itoh, T.; Caloz, C. Composite right/left-handed transmission line metamaterials. IEEE Microw. Mag. 2004, 5, 34–50. [Google Scholar] [CrossRef]
- Kumbharkhane, A.; Helambe, S.; Lokhande, M.; Doraiswamy, S.; Mehrotra, S. Structural study of aqueous solutions of tetrahydrofuran and acetone mixtures using dielectric relaxation technique. Pramana 1996, 46, 91–98. [Google Scholar] [CrossRef]
- Petong, P.; Pottel, R.; Kaatze, U. Water- ethanol mixtures at different compositions and temperatures: A dieletric relaxation study. J. Phys. Chem. A 2000, 104, 7420–7428. [Google Scholar] [CrossRef]
- Smith, R., Jr.; Lee, S.; Komori, H.; Arai, K. Relative permittivity and dielectric relaxation in aqueous alcohol solutions. Fluid Phase Equilibria 1998, 144, 315–322. [Google Scholar] [CrossRef]
- Karras, T.; Laine, S.; Aila, T. A style-based generator architecture for generative adversarial networks. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019; pp. 4401–4410. [Google Scholar]
- Fetty, L.; Bylund, M.; Kuess, P.; Heilemann, G.; Nyholm, T.; Georg, D.; Löfstedt, T. Latent space manipulation for high-resolution medical image synthesis via the StyleGAN. Z. Med. Phys. 2020, 30, 305–314. [Google Scholar] [CrossRef]
- Schutte, K.; Moindrot, O.; Hérent, P.; Schiratti, J.B.; Jégou, S. Using stylegan for visual interpretability of deep learning models on medical images. arXiv 2021, arXiv:2101.07563. [Google Scholar]
- Nikitko, D. Stylegan-Encoder. Available online: https://github.com/Puzer/stylegan-encoder (accessed on 29 May 2022).
- Williams, C.K.; Rasmussen, C.E. Gaussian Processes for Machine Learning; MIT Press: Cambridge, MA, USA, 2006; Volume 2. [Google Scholar]
- Baghelani, M.; Hosseini, N.; Daneshmand, M. Artificial intelligence assisted noncontact microwave sensor for multivariable biofuel analysis. IEEE Trans. Ind. Electron. 2020, 68, 11492–11500. [Google Scholar] [CrossRef]
- Baghelani, M.; Hosseini, N.; Daneshmand, M. Non-contact real-time water and brine concentration monitoring in crude oil based on multi-variable analysis of microwave resonators. Measurement 2021, 177, 109286. [Google Scholar] [CrossRef]
- Saeedi, S.; Chamaani, S. Non-contact Time Domain Ultra Wide Band Milk Spectroscopy. IEEE Sens. J. 2021, 21, 13849–13857. [Google Scholar] [CrossRef]
- Harnsoongnoen, S.; Wanthong, A. A non-contact planar microwave sensor for detection of high-salinity water containing NaCl, KCl, CaCl2, MgCl2 and Na2CO3. Sens. Actuators B Chem. 2021, 331, 129355. [Google Scholar] [CrossRef]
- Saghati, A.P.; Batra, J.S.; Kameoka, J.; Entesari, K. A metamaterial-inspired wideband microwave interferometry sensor for dielectric spectroscopy of liquid chemicals. IEEE Trans. Microw. Theory Tech. 2017, 65, 2558–2571. [Google Scholar] [CrossRef]
- Havelka, D.; Krivosudský, O.; Průša, J.; Cifra, M. Rational design of sensor for broadband dielectric spectroscopy of biomolecules. Sens. Actuators B Chem. 2018, 273, 62–69. [Google Scholar] [CrossRef]
- Baghelani, M. Wide-Band Label-Free Selective Microwave Resonator-Based Sensors for Multi-Component Liquid Analysis. IEEE Sens. J. 2021, 22, 2128–2134. [Google Scholar] [CrossRef]
- Hosseini, N.; Baghelani, M. Selective real-time non-contact multi-variable water-alcohol-sugar concentration analysis during fermentation process using microwave split-ring resonator based sensor. Sens. Actuators A Phys. 2021, 325, 112695. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | g | Wstub | lIDC | Istub1 | Istub2 | Istub3 |
| Value [mm] | 0.4 | 0.8 | 4 | 3 | 4.5 | 2 |
| Rogers 5880 | Thickness | |||||
| 2.2 | 0.0009 | 0.5 | ||||
| Ref | Sensing Technique | [GHz] | Method | Material | Applications/Metrics |
|---|---|---|---|---|---|
| [42] | Planar SRR 1 | 0.5–4.5 | Multi-harmonics analysis using ANN | Water/ethanol/gasoline | Gas and oil industryMSE: 0.057% |
| [43] | Planar SRR | 1–10 | Mathematical analysis | Saline water/oil/brine | Detection of water and brine in oil—Error: 0.87% |
| [44] | Xethru Radar | 6–7.75 | Time-domain analysis | Water and fat in raw milk | Dairy industry MSE: 0.29% |
| [45] | strip SRR | 0.5–2.2 | logarithmic regression method | CaCl2, NaCl, KCl, MgCl2 and Na2CO3 | Concentrations of salts in water—error: ±1 MHz |
| [46] | CSRR 2 | 4.2–8 | Microwave interferometry | Ethanol/methanol/ butan-1-ol/propan-1-ol | Error: 1.1% |
| [47] | CBCPW | 0.5–40 | Stokes–Einstein–Debye equation | Water/Alanine | Biosensing and bioelectromagnetics |
| [48] | Multi-Slot SRR | 0.1–6.5 | Multi-resonance analyzed using AI | Water/methanolethanol/peroxide/acetoneglycerol/propanol | MSE: 0.13% |
| [4] | Single wire coil | 0.2–4.5 | Volumetric analysis of the mixtures | Water–clay/bitumen | Bitumen–water–clay analysis—MAE: 4% |
| [49] | Planar SRR | 1.1, 2.2 | Mathematical analysis of in mixture | Ethanol–water–glucose | Fermentation process in food industry—Error: 0.087% |
| This work | 0th-order resonator | 3–6 | CNN-based selective classifier | Water in methanol, ethanol, acetone | Selectivity in biomedical/CCE: 0.21%accuracy: 90.7% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kazemi, N.; Gholizadeh, N.; Musilek, P. Selective Microwave Zeroth-Order Resonator Sensor Aided by Machine Learning. Sensors 2022, 22, 5362. https://doi.org/10.3390/s22145362
Kazemi N, Gholizadeh N, Musilek P. Selective Microwave Zeroth-Order Resonator Sensor Aided by Machine Learning. Sensors. 2022; 22(14):5362. https://doi.org/10.3390/s22145362
Chicago/Turabian StyleKazemi, Nazli, Nastaran Gholizadeh, and Petr Musilek. 2022. "Selective Microwave Zeroth-Order Resonator Sensor Aided by Machine Learning" Sensors 22, no. 14: 5362. https://doi.org/10.3390/s22145362
APA StyleKazemi, N., Gholizadeh, N., & Musilek, P. (2022). Selective Microwave Zeroth-Order Resonator Sensor Aided by Machine Learning. Sensors, 22(14), 5362. https://doi.org/10.3390/s22145362